











 の
の









[イベントの構成]ページからイベントを構成できるかどうかをユーザーに通知します。
ToolsTalk 2 (2.25)
Software
はじめに
このセクションでは、製品に関する基本的な情報と、トピックで使用されている書式設定規則について説明します。
製品基本情報
ToolsTalk 2 はお客様の生産ライン管理業務を新たなレベルに引き上げます。クライアント-サーバ方式のソフトウェアにより、設定作業の容易化・迅速化と共に、生産ライン全体に対する完全な可視性とトレーサビリティを提供します。ToolsTalk 2は、最先端のユーザエクスペリエンスに基づいて開発されています。独自の機能を数多く備えており、シンプルな機能管理システム(FMS)を介して、いつでも追加機能を各工程に割り当てることができます。ToolsTalk 2は、複雑な製造システムにおける品質管理の維持や生産稼働時間の増加に貢献します。
規約
ユーザーの皆様にさらにご理解いただけるように、本文書全体で特定のフォーマッティング規約を使用しています。使用される書式規則を以下に示します。
要素 | 表記 | 説明 | 出力 |
|---|---|---|---|
一般的な強調 | プログラム ワークスペース内。 | 特定のテキスト要素を目立たせる、またはハイライト表示します。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) 項目 | 機能ボタンを選択します。 | GUI の画面上にある項目に関する記載 (コマンド ボタン、アイコン名、フィールド名など)。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) パス > | 一般に、GUI の上部にあります。 | GUI 内の場所を追跡するナビゲーション補助。 | 例:コントローラ > プログラム > 編集 |
ユーザー入力 | プログラムの説明を入力します。 | ユーザーが入力する任意のテキスト。 | 太字のテキスト |
ファイル名 | エクスポートするファイル名を入力します。 | システムからエクスポートまたはインポートされたファイル。 | 太字斜体のテキスト |
変数およびパラメーターの名前 | エクスポートの名前を入力します。 | 変数名とパラメーター名 (値ではありません)。 | 斜体のテキスト |
変数およびパラメーターの値 | エクスポートの値を入力します。 | 変数とパラメーターの値。 | 太字大文字のテキスト |
システム出力 | Client.Domain.Models.ExportImportConfiguration | システムによって出力される任意のテキスト。 | 等幅のテキスト |
外部リンク | 文書または対象のコンテンツに関連する情報がある外部サイトへのリンク。これには、次のようなものがあります:
| 外部サイトへの選択可能なテキスト | |
内部ドキュメントへのリンク |
ある場合、これらのリンクはテキストの下に表示されます。 | 内部コンテンツへの選択可能なテキスト |
責任と警告
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
責任
動作環境における多くの事象が締め付けプロセスに影響を与える可能性があり、結果の検証が必要となります。適用規格および/または規制に準拠して、当社は、ここで、締め付け結果に影響を与える可能性のある事象があった場合に、導入したトルクおよび回転方向を確認いただくよう要請します。このような事象の例として、以下のものがありますが、これらに限定されるものではありません。
ツーリングシステムの初めての設置
部品バッチ、ボルト、ネジバッチ、ツール、ソフトウェア、構成または環境の変更
空気接続または電気接続の変更
ライン人間工学、プロセス、品質手順または慣行の変更
オペレーターの変更
締め付けプロセスの結果に影響を与えるその他の変更
以下について確認する必要があります。
影響のある事象によりジョイントの条件が変更されていないこと。
初めての機器の設置、メンテナンスまたは修理後に完了していること。
少なくともシフト毎に一回、または他の適切な頻度に行うこと。
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
改訂履歴
ToolsTalk 2 ソフトウェアのバージョン | 改訂日 | 変更 |
|---|---|---|
2.25 | 2025 年 4 月 | 更新されたコンテンツ
新しいコンテンツ |
2.24 | 2025 年 10 月 | 更新されたコンテンツ
新しいコンテンツ
|
2.22 | 2025 年 03 月 | 更新されたコンテンツ
新しいコンテンツ
削除されたコンテンツ:
|
2.21 | 06/2023 | 更新されたコンテンツ
新しいコンテンツ
削除されたコンテンツ:
|
2.20 | 01/2023 | 更新されたコンテンツ:
|
2.19 | 06/2022 | 更新されたコンテンツ:
|
2.18 | 01/2022 | 新しいコンテンツ:
更新されたコンテンツ:
|
2.17.1 | 09/2021 | 新しいコンテンツ:
更新されたコンテンツ:
|
2.17 | 06/2021 | 新しいコンテンツ: PF6000
FlexSystem
更新されたコンテンツ:
削除されたコンテンツ:
|
関連情報
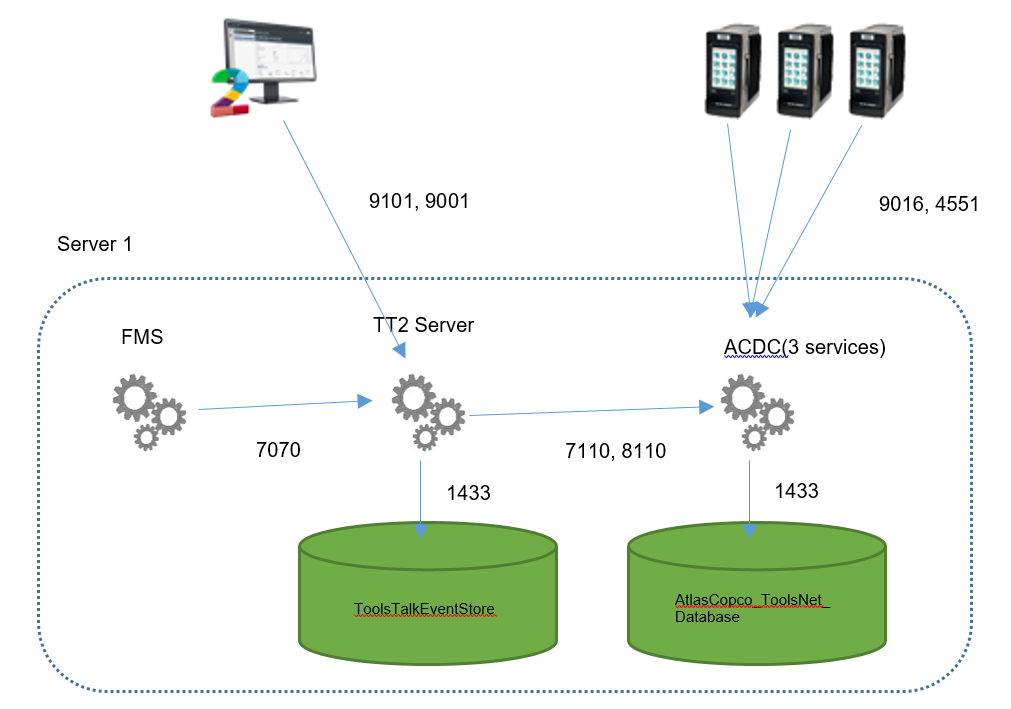
システム概要
製造システムは、図の機能ブロックで構成することができます。
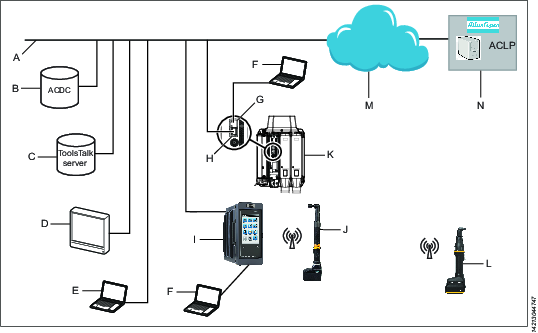
A | 工場ネットワーク 。 | H | コントローラ 工場ポート: 工場ネットワークに接続されています。 |
B | ACDC: 締付けの結果の保管と統計分析用。 | I | Power Focus 6000 コントローラ: 手持ち工具に使用します。 |
C | ToolsTalk 2 サーバー: コントローラおよびIXBツールの構成とパラメーター設定用。 | J | ハンドヘルド バッテリー ツール コントローラとのワイヤレス接続を使用します。 |
D | 工業用 PC (IPC): ToolsTalk 2 および ToolsNet サーバー用クライアント端末として使用できます。 | K | PF6 Flex コントローラ: 固定工具と共に使用します。 |
E | 工場ネットワークに接続されたポータブル コンピューター ToolsTalk 2 および ToolsNet サーバー用クライアント端末として使用できます。 | L | IXB ハンドヘルド バッテリー ツール 工場ネットワークへのワイヤレス接続を使用します。 |
F | サービス コンピューター: コントローラまたはIXBツールのサービスポートに接続できます。 | M | インターネットクラウド。 |
G | コントローラ サービスポート サービス コンピューターの接続にも使用できます。 | N | Atlas Copco Licensing Portal (ACLP):Atlas Copco にあり、Functional Management System (FMS) のライセンスされた機能へのサポートを提供します。 |
ソフトウェア構造
アイコン | 説明 |
|---|---|
 | ToolsTalk 2 のシステムユーザー管理者。言語、温度、コントローラーイベント通知、トルク単位を選択します。 |
 | 情報アイコンは次を示します。
|
 | ヘルプアイコンを選択すると、 ユーザーガイドの選択ウィンドウが開きます。
|
 | プラント構造 プラント構造ワークスペースには、個別のコントローラーが選択されています。ワークスペースは複数のアイコンに分割されています。各アイコンの下にあるメニューはデータとパラメーター設定の構成に使用されます。 アイコンはコントローラーインターフェースと Web インターフェースとでは異なりますが、インターフェースはそれぞれで作成できるパーティションと構成で同様です。 |
 | 締め付けプログラム これを選択すると、ワークスペースに既存の締め付けプログラムのリストが表示されます。各プログラムを選択すると、選択した締め付けプログラムのパラメーターの構成と設定のための異なるメニューが開きます。 |
 | バッチシーケンス これを選択すると、ワークスペースに既存のバッチシーケンスのリストが表示されます。各バッチシーケンスを選択すると、選択したバッチシーケンスのパラメーターの構成と設定のために異なるメニューが開きます。 |
 | Sync Mode このアイコンは、並列マルチステップ機能のあるコントローラーのみに表示されます。 ワークスペースは、すべての同期されているマルチステップの締め付けプログラムのパラメーターの構成と設定に使用されます。 |
 | ソース ワークスペースは、スキャナのパラメーターの構成と設定に使用されます。 ワークスペースは、次のタスクを選択する識別子の使用方法の構成に使用されます。 |
 | 構成 選択すると、ワークスペースに既存の構成のリストが表示されます。パラメーターの構成と設定のためのメニューは、次の選択したデバイスのタイプによって異なります。
|
 | ツール ワークスペースは、コントローラーに接続されているツールを表示し、ツールのメンテナンスの間隔と校正データの表示と設定のために使用されます。 |
 | 仮想ステーション これを選択すると、ワークスペースに既存の仮想ステーションのリストが表示されます。各仮想ステーションを選択すると、次のパラメーターの構成と設定のためのメニューが開きます。
|
 | コントローラー情報 コントローラーに含まれている、コントローラーのハードウェアとソフトウェアのモジュール。 |
 | フィールドバスと SoftPLC ワークスペースは、フィールドバスと SoftPLC の設定に使用されます。 |
 | 設定
|
 | 結果 選択されているコントローラーの前回の締め付け結果を表示します。結果は表形式またはグラフィカルトレース形式で表示されます。 |
 | イベント 選択されているコントローラーの前回の締め付けイベントを表示します。設定 |
| 統計 統計計算からの統計的プロセス制御データをグラフで示します。 |
 | ライブラリ コントローラー間で再利用できるライブラリテンプレートを管理するためのサブメニューが含まれています。 |
 | コントローラーライブラリ コントローラー構成のライブラリ。サーバーをインストールすることなく、単一のラップトップコンピュータに ToolsTalk 2 機能を提供するステーションセットアップモードにおいて非常に便利です。 |
 | プログラムテンプレートライブラリ このライブラリには、新しいマルチステッププログラムの作成に使用するテンプレートとして保存されているマルチステッププログラムが含まれます。マルチステッププログラムテンプレートを編集しても、そのテンプレートに基づくマルチステッププログラムには影響しません。 |
 | 締め付けプログラムのライブラリ 締め付けプログラムのライブラリ。既存の締め付けプログラムをライブラリにコピーすることができます。ライブラリの締め付けプログラムへの編集は、その締め付けプログラムに登録しているすべてのコントローラーに影響します。 |
 | 構成ライブラリ 仮想ステーション、デバイス、アクセサリーの構成のライブラリ。既存の構成をライブラリにコピーすることができます。ライブラリ構成への編集は、その構成に登録しているすべてのコントローラーに影響します。 |
 | フィールドバスライブラリ フィールドバス構成のライブラリ。既存のフィールドバス構成をライブラリにコピーすることができます。フィールドバス構成への編集は、そのフィールドバス構成に登録しているすべてのコントローラーに影響します。 |
 | 設定ライブラリ 他のコントローラーに配布できるイベント構成用のライブラリ。イベントは、ここまたは設定 |
 | Sync Modeライブラリ Sync Mode 構成を作成および変更し、それらを複数のコントローラーに配布するために使用できるSync Modeテンプレートを含むライブラリ。 |
 | システム管理 ソフトウェアの更新、構成パラメーターのインポート/エクスポート、プログラムの承認、タスクのスケジューリング、および機能管理システムのための機能が含まれています。 |
 | コントローラーソフトウェアとデータ管理 ToolsTalk 2 サーバーからコントローラーソフトウェアを管理します。 |
 | スケジュールしたエクスポートとインポート 1 つ以上のコントローラーに影響する繰り返しタスクと、ToolsTalk 2 サーバーで実行される繰り返しタスクをスケジュールします。 |
 | ユーザーグループ 異なるユーザーグループと、フォルダー、コントローラー、構成へのユーザーグループ権限を管理します。 |
 | 機能管理システム (FMS) ToolsTalk 2 サーバーからライセンスされているコントローラー機能を管理します。 |
 | プログラムの承認 プログラムの締め付けと緩めの承認を管理します。 |
 | プッシュ プッシュインジケーターは、ToolsTalk 2 の任意のコントローラーに構成が作成されると表示されます。 構成とパラメーターへの変更は、プッシュ機能からコントローラーにコピーされます。 |
コントローラーアイコンはコントローラー GUI と Web GUI とは異なりますが、それぞれのアイコンで作成できるパーティションと構成では同様です。
ToolsTalk 2 を正常に開始すると、上記のアイコンを含む、次のビューが表示されます。

A | 左側のメニューバー | C | システムメニューバー |
B | プラント構造ワークスペース | D | コントローラーワークスペース |
コントローラーワークスペースエリアには、選択するアイコンやメニューによって異なる内容が表示されます。
構成オプション
コントローラの構成およびセットアップは次の方法で行うことが出来ます:
コントローラ GUI: タッチスクリーン式 Power Focus 6000 コントローラに該当します。コントローラはネットワークに接続されているかどうかにかかわらず構成できます。
Web GUI: PCはコントローラのサービスポートに直接接続できます。それ以外の場合で、コントローラがネットワークに接続されており、その IP アドレスがわかっている場合、ネットワーク上のどこからでもアクセスできます。アクセスできるのは同時に1台のコントローラのみです。Power Focus 6000 では、Web GUI のアイコンはコントローラ GUI のアイコンと同じです。FlexController のアイコンは多少異なります。すべてのコントローラには、それらに固有のアイコンがある場合があります。
ToolsTalk 2 GUI: コントローラが ToolsTalk 2サーバーに接続されている場合、ToolsTalk 2 クライアント(PC)は ToolsTalk 2 GUI を通じて、接続されているすべてのコントローラにアクセスできます。Power Focus 6000 コントローラおよび FlexControllers の両方にアクセスできます。GUI は PC 全画面、別のパーティション分割と別のアイコンを使用していますが、同じ機能を提供します。
Station Setup モードにおける ToolsTalk 2 GUI: サーバーのインストール不要で PC 上での ToolsTalk 2 インターフェースを提供します。PC はコントローラ サービスポートに接続されており、同時に1台のコントローラへのアクセスを提供します。
ライセンスの導入
コントローラ機能のライセンスは、機能管理システム(FMS)を通じて管理されます。FMS により、ユーザーは動的ライセンス方式を介して、コントローラー機能を特定のニーズに合わせて変更できます。
ライセンスは、個々の機能または機能の集合に対して取得することができ、複数の仮想ステーションに展開することができます。ライセンスは不要になったときライセンス プールに戻すことができます。ライセンスは、アトラスコプコ ライセンスポータル(ACLP)を通じて入手できます。ライセンスは、ACLP からダウンロードし、ToolsTalk を通じて管理または配布できます。また、FMS ポータブル (USB ドライブ) に保存してコントローラに挿入することもできます。
ACLP における顧客アカウントの作成と管理は、このマニュアルで扱っていません。詳細については、アトラスコプコの代理店にお問い合わせください。
ライセンスの概要
ライセンスによって管理される機能の設定は、ライセンスがインストールされていなくても実行できます。例えば、締め付けプログラムの構成とマルチステッププログラムの構成など。これらの機能をツールまたは仮想ステーションに割り当てることも可能です。ただし、有効なライセンスなしで機能を実行するには、適切なライセンスをインストールする必要があります。
ライセンスの適用は2つの段階、割り当てとランタイム(トリガー押下)で実行されます。ライセンスがインストールされていない機能が仮想ステーションに割り当てられている場合、ToolsTalk 2の仮想ステーションビューで赤い感嘆符が表示されます。コントローラ GUI には、ツールまたはタスク セクションに警告三角形も表示されます (不足しているものによって異なります)。ライセンスがインストールされていない機能が開始された場合(つまり、トリガが押された場合)、ユーザーにどのライセンスが不足しているかを通知するイベントが表示されます。正しいライセンスがインストールされていない場合、続行することはできません。
ライセンスされていない機能を実行すると、ほとんどの場合、ツールがロックされます。
コントローラ内の多くの機能は、仮想ステーションで割り当て、使用するためのライセンスが必要です。ライセンスには次の 4 種類があります:
仮想ステーションタイプ
1つのパッケージにまとめられた一定の機能群。バーチャルステーションタイプは、実行可能なツール、使用可能なプログラムとシーケンスの数、使用可能な締め付け戦略、実行可能なレポートの種類など、その他多数を決定します。各バーチャルステーションタイプに含まれる機能は、通常お互いに併用される機能、またはパッケージに他の機能が必要な内部依存性を持つ機能です。バーチャルステーションタイプは、バーチャルステーションに完全に割り当てられます。バーチャルステーションはバーチャルステーションタイプに含まれるすべての機能を活用することができます。締め付けを行うためには、バーチャルステーションにバーチャルステーションタイプライセンスを割り当てる必要があります。ライセンスの種類によって、さまざまな締め付けオプションが有効またはブロックされます。
同期機能タイプ
「仮想ステーションタイプ」での説明と同じ方法で動作しますが、固定システムに使用されます。仮想ステーション上で複数のツールを実行できるようにするには、各ツールに同期機能ライセンスが必要です。
バーチャルステーション機能
バーチャルステーションタイプを補完する個々の機能。単一のライセンスとして多くの機能を購入することができます。
コントローラ機能
コントローラ全体の機能これらはコントローラに割り当てられる機能であり、割り当てられた後は、そのコントローラ上のすべての仮想ステーションで使用できます。
ライセンスレベル
ラインライセンサー、ラインコンフィギュレーター、ラインマネージャー
これら3つのバージョンはすべて、ToolsTalk 2のクライアントサーバーベースのインストールですが、機能セットはそれぞれ異なります。ラインライセンサーは、その他のいずれかのライセンスがインストールされていない場合に、ToolsTalk 2がクリーンインストールされる最小のパッケージです。ToolsTalk 2 のステータスがラインライセンサーの場合、すべてのラインマネージャーとラインコンフィギュレータ機能が表示されますが、ユーザーが含まれている機能を使用しようとするたびに警告メッセージが表示されます。
ToolsTalk 2は、ダウングレードが開始された場合、ラインマネージャーで作成されたデータのみをリンク解除または削除します。これは、たとえば、Line Configurator ライセンスにダウングレードする場合や、Line Manager ライセンスの試用期間が終了した場合などに発生します。
Station Setup
これはToolsTalk 2のバージョンで、すべてのコンポーネントがコンピュータ上にローカルに配置され、1対1の接続を提供します。ステーション セットアップは SQL Server データベース接続なしで実行され、一度に 1 つの接続されたコントローラーのみを有効にする制限が組み込まれています。Station Setupを使用するには有効なライセンスが必要です。そうでない場合、警告メッセージが表示されます。
ライセンスのないステーションセットアップには1つの仮想ステーションを含めることができ、これはライセンスサーバーに対して検証されます。
ライセンス機能
記号 | 説明 |
|---|---|
X | すべての機能。 |
X¹ | 接続、切断、再起動が有効になります。 |
X² | 変更が行われた場合は、プッシュが有効になります。 |
X³ | カスタム セクション、再起動、および右クリック機能が有効になります。 |
X⁴ | データベースメンテナンスのみが有効です。 |
X⁵ | 読み取りアクセスのみ。プログラムのエクスポートが有効です。 |
X6 | ToolsTalk 2 Station Setupは、 Station Setupがコントローラーに接続されている間、つまりコントローラーがオンライン中に作成されたコントローラーの結果にのみアクセスできます。 |
ラインライセンサー | ラインコンフィギュレーター | Station Setup ライセンス | ラインマネージャー | |
|---|---|---|---|---|
プラント構造 | ||||
右クリック - 新しいコントローラーの追加 | X | X | X | X |
右クリック機能 | X¹ | X | X | X |
プログラム構成の履歴 | X | |||
締め付けプログラム | X⁵ | X | X | X |
バッチシーケンス | X⁵ | X | X | X |
ソース | X⁵ | X | X | X |
構成 | X⁵ | X | X | X |
ツール | X⁵ | X | X | X |
仮想ステーション | X⁵ | X | X | X |
コントローラー | X⁵ | X | X | X |
設定 | X⁵ | X | X | X |
フィールドバス | X² | X | X | X |
SoftPLC | X | X | X | |
結果 | X | X6 | X | |
イベント | X | X | X | X |
ライブラリ | ||||
締め付けプログラム | X | |||
構成 | X | |||
フィールドバス | X | |||
設定 | X | |||
プログラムテンプレート | X | |||
コントローラーの構成 | X | X | X | |
システム管理 | ||||
コントローラーソフトウェアとデータ管理 | X³ | X³ | X | |
スケジュールされたタスク | X⁴ | X⁴ | X⁴ | X |
機能管理システム (FMS) | X | X | X | X |
ユーザーグループ | X | |||
プログラムの承認 | X |
サポートされているツール
仮想ステーションでサポートされるツールは、コントローラーの仮想ステーションのタイプによって異なる場合があります。
サポートされているツール | BatchControl | JointControl | StationControl | CriticalControl | ProcessControl |
|---|---|---|---|---|---|
BCP / BCV | X | - | - | - | - |
TensorSB | - | X | X | - | - |
TensorSL | - | - | X | X | X |
TBP | - | - | X | X | X |
TensorST | - | - | X | X | X |
TensorSTR | - | - | X | X | X |
SRB | - | - | X | X | X |
TensorSTB | - | - | X | X | X |
STWrench | - | - | X | X | X |
TensorES | - | X | X | - | - |
TensorSR | - | - | X | X | X |
QST(固定スピンドル) | - | - | X | X | X |
TBPS | - | X | X | - | - |
MWR-S(メカトロニックレンチ信号) | - | - | - | - | - |
MWR-T(メカトロニックレンチトルク) | X | X | X | X | - |
MWR-TA(メカトロニックレンチ トルク角) | - | - | X | X | X |
外部ツール | X | X | X | X | X |
ITB-A | - | - | X | X | X |
ICB-A | - | - | X | X | X |
ITB-P | - | - | X | X | X |
セキュリティ
このページには、サイバーセキュリティに関連する ToolsTalk 2 のユーザーガイドコンテンツが掲載されています。
ToolsTalk 2 で HTTPS を有効にする
インストールとアップグレード
このセクションでは、製品の初期インストールや、バージョンを別のバージョンにアップグレードする際に役立つ情報を見つけることができます。
インストールの概要と要件
サイバーセキュリティ
互換性マトリックス
特に明記されていない限り、ToolsTalk 2ソフトウェアのすべてのバージョンは下位互換性があります
ToolsTalk2 | PF6 FlexSystem | PF6000 | PF6000 同期締め付け | アトラスコプコのデータ通信バージョン | IxB | PF8 | PF8 同期締め付け | ツール管理 |
|---|---|---|---|---|---|---|---|---|
2.3 | 該当なし | 2.0、2.1、2.1、1、2.3 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.4 | 該当なし | 2.4 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.5 | 1.2 | 2.4 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.6 | 1.2 | 2.5 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.7 | 1.3 | 2.6 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.7.1 | 1.3.1 | 2.6 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.8 | 1.3.1 | 2.7 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.9 | 2.0 | 2.7 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.11 | 2.1 | 2.8 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.12 | 3.0 | 3.0 | 3.0 | 該当なし | 該当なし | 該当なし | 該当なし | 該当なし |
2.13 | 3.1 | 3.1.1 | 3.1.1 | 1.7 | 該当なし | 該当なし | 該当なし | 該当なし |
2.14 | 3.3 | 3.3 | 3.3 | 1.9 | 3.3 | 該当なし | 該当なし | 該当なし |
2.15 | 3.4 | 3.4 | 3.4 | 1.11 | 3.4 | 該当なし | 該当なし | 該当なし |
2.16 | 3.5 | 3.5 | 3.5 | 1.13 | 3.5 | 3.5 | 3.5 | 該当なし |
2.17 | 3.6 | 3.6 | 3.6 | 2.1.3 | 3.6 | 3.6 | 3.6 | 該当なし |
2.18 | 3.7 | 3.7 | 3.7 | 2.2.2 | 3.7 | 3.7 | 3.7 | 該当なし |
2.19 | 3.8 | 3.8 | 3.8 | 2.4 | 3.8 | 3.8 | 3.8 | 該当なし |
2.20 | 3.9 | 3.9 | 3.9 | 2.5 | 3.9 | 3.9 | 3.9 | 該当なし |
2.21 | 3.10 | 3.10 | 3.10 | 3.0 | 3.10 | 3.10 | 3.10 | 3.6–3.10 |
2.22 | 3.11 | 3.11 | 3.11 | 3.0 | 3.11 | 3.11 | 3.11 | 3.6–3.11 |
2.24 | 3.13 | 3.13 | 3.13 | 3.4 | 3.13 | 3.13 | 3.13 | 3.6–3.13 |
2.25 | 3.14 | 3.14 | 3.14 | 3.5 | 3.14 | 3.14 | 3.14 | 3.6–3.14 |
ToolsTalk 2はアトラスコプコデータ通信の上位バージョンで実行できます。マトリックスに記載されているアトラスコプコのデータ通信バージョンが、ToolsTalk 2ソフトウェアと互換性のある最も低いバージョンと見なされます。
設置の概要
インストールまたはアップグレードの前に
同じコンピュータに Station Setup とクライアント/サーバーの両方をインストールすることは推奨されません。コンピューターから不要なインストールのコンポーネントをアンインストールして、確実に消去してください。
Microsoft SQL データベース、 ToolsTalk 2 サーバー アプリケーション、および ToolsTalk 2 クライアント アプリケーションは同じコンピューターにインストールすることが出来ます。
サーバーのインストール
ステップ | すること | 確認 |
|---|---|---|
1 | アプリケーションをインストールするコンピューターで管理者権限を使用できることを確認してください。 | ░░ |
2 | クライアントアプリケーションをインストールするコンピューターの管理者権限が利用できることを確認してください。 | ░░ |
3 | 記載されている前提条件通りのコンピューターとプログラムが使用できることを確認してください。 | ░░ |
4 | 記載の前提条件通りにインストールが完了した 64 ビットの Microsoft SQL データベースのインストールが完了していることを確認してください。 | ░░ |
5 | サーバーアプリケーションで実行可能ファイルを使用できます。 | ░░ |
6 | クライアントアプリケーション用の実行可能ファイルを使用できます。 | ░░ |
7 | Atlas Copco Data Communication (ACDC)がインストールされ、実行されており、ToolsTalk 2 (ToolsTalk 2 2.13以降のバージョンのみ)の現在のバージョンと互換性があります。Atlas Copco Data Communication インストールのユーザーガイドを参照してください。 | ░░ |
Station Setup のインストール
ステップ | すること | 確認 |
|---|---|---|
1 | アプリケーションをインストールするコンピューターで管理者権限を使用できることを確認してください。 | ░░ |
2 | 記載されている前提条件通りのコンピューターとプログラムが使用できることを確認してください。 | ░░ |
3 | ステーションセットアップアプリケーション用の実行可能ファイルを使用できます。 | ░░ |
インフラ
ステップ | すること | 確認 |
|---|---|---|
1 | サーバーの種類(仮想または物理)を決定します。 | ░░ |
2 | データベースの場所(ローカルまたはリモート)を決定します。 | ░░ |
3 | 認証の種類(なしまたはWindows Active Directory)を決定します。 | ░░ |
4 | アプリケーションサーバーの RAM の容量が十分であることを確認します。設置の前提条件を参照してください。 | ░░ |
5 | データベース用のディスク容量が十分であることを確認します。設置の前提条件を参照してください。 | ░░ |
設置
ステップ | すること | 確認 |
|---|---|---|
6 | Windows Server 2019以上がアプリケーションサーバーにインストールされていること。 | ░░ |
7 | サーバー上でポートが開いていること。ソフトウェアのインストールを参照して個々のインストールの種類を選択して、ポート情報を表示させます。 | ░░ |
8 | SQL Server 2019以上。 | ░░ |
9 | .NET 8 | ░░ |
10 | インストールとアップグレードのToolsTalk 2ユーザーガイド(最新バージョン)をご通読ください。 | ░░ |
11 | JAVAをインストールして構成します。JAVAのインストールと構成を参照してください。 | ░░ |
12 | Install the latest version of the Atlas Copco Data Communication (ACDC)。Atlas Copco Data Communication インストールのユーザーガイドを参照してください。 | ░░ |
13 | ToolsTalk 2の最新バージョンをインストールします。 ソフトウェアのインストールを参照してください。 | ░░ |
14 | サービスを開始します。 | ░░ |
構成
ステップ | すること | 確認 |
|---|---|---|
15 | ライセンスファイルをアップロードします。機能管理システム (FMS)を参照してください。 | ░░ |
16 | データベースのメンテナンススケジュールタスクを構成します。データベースメンテナンスを参照してください。 | ░░ |
アップグレード(クライアント/サーバーおよびClickOnce)
ステップ | すること | 確認 |
|---|---|---|
1 | ToolsTalk 2サービスが実行されていることを確認してください。 | ░░ |
2 | インストールの構成を変更しない場合は、インストールコンフィギュレーターで[保存]を選択します。 | ░░ |
関連情報
設置の前提条件
データベースの要件
全てのコントローラ データおよび構成がデータベース カタログに格納されてること。データベースが標準 64 ビット Microsoft SQL データベースであること。
Microsoft SQL データベースのインストールについては本書に記載されていません。標準インストール手順に従うことが推奨されます。
Microsoft SQL データベースは、Microsoft SQL サーバー上またはToolsTalk 2 アプリケーションと同じネットワーク上に配置できます。
データベースが別の場所に配置されている場合は、データベースと ToolsTalk 2 アプリケーションサーバー間でのトラフィックを可能にするため、ファイアウォールを正しく構成する必要がある可能性があります。
Atlas Copco Data Communication サーバーの IP アドレスが既知であり、これが ToolsTalk 2 に接続されているすべてのコントローラーに入力されている必要があります。
リモート接続を使用する場合、クライアント PC はToolsTalk 2アプリケーションをホストするサーバーアドレスを知っている必要があります。
SQL データベースのインストールにおける必須事項
64 ビットMicrosoft SQL。
Microsoft SQL サーバー認証と Window 認証の両方を選択します
Microsoft SQL データベースのインストールにおける推奨事項
Microsoft SQL Server Management Studio をインストールします
既定のインスタンスを有効化させます。
その他の要件
ToolsTalk 2のエコシステムは次の機能を必要とします:
クライアント、サーバー、Station Setup、ClickOnce には64ビットが必要です。
ToolsTalk 2 サーバーおよび PC クライアントソフトウェアには .NET 8 が必要です。
エリア | カテゴリー | 最低要件 | コメント | |
|---|---|---|---|---|
a 接続しているコントローラーが 150 台未満の場合は、4 つの物理 CPU コアを使用してください。150 台を超えるコントローラーが接続されている場合は、8 つの物理 CPU コアを使用してください。 | ||||
サーバーソフトウェアの要件 | データベース | SQL Server 2019 またはそれ以降のバーション SQL Express 2019 以降のバージョン (互換性はありますが推奨されません) | データベースは同じコンピューター上に、またはリモート データベース サーバーにインストールすることが出来ます。 | |
Java | Oracle Java SE 17 または OpenJDK 17 | 64 ビット バージョン | ||
.NET 8 | SDK 8.0.204 (x64) | TT2 サーバー | ||
SDK 8.0.204 (x64) および SDK 8.0.204 (x86) | TT2 クライアント および TT2 ステーションのセットアップ | |||
サーバー ハードウェア要件 | プロセッサー | Intel XEON デュアル プロセッサー、2.3 GHz 以上a | この仕様は必要とされる性能の目安としてのみ示されています。 | |
メモリ (RAM) | 64 GB | この仕様は必要とされる性能の目安としてのみ示されています。 | ||
ディスク領域 | 100 GB | データベースは時間の経過につれて大きくなることにご注意ください。構成および構成の変更はデータベースに保管されます。コントローラが増えると、データベースに追加される情報も増えます。 | ||
PC クライアント要件 | オペレーティングシステム | Windows 11 | ||
.NET 8 | SDK 8.0.204 (x64) および SDK 8.0.204 (x86) | |||
ユーザー権限 | データベース アクセス | システム管理者アクセスまたは同等 | インストールを実行するユーザーは、データベースにユーザーを作成するための管理者権限も必要です。 | |
Windows アクセス | 管理者アカウント | アプリケーションとその依存関係のインストールに必要です。 | ||
ポート
ネットワーク経由で次のポートにアクセスできることを確認してください。通常、企業の IT 部門は、ネットワーク経由でポートにアクセスできることを確認できます。
22 (SoftPLC を使用する場合または必要な場合のみサーバーに適用)
80 (サーバーにのみ適用)
7070
9016 (ハブポートまたはカスタムポート番号)
9101 (またはカスタムポート番号)
ポート 80 を別の値に変更した場合は、接続されているすべてのコントローラーでも変更を行う必要があります。
ポート 80 は、サーバーのインストール中にのみ変更できます。
ライセンス要件
Atlas Copco ライセンスサーバーは Functional Management System (FMS)がライセンスされている機能項目に使用されている際に必要となります。
ライセンスサーバーはサーバーインストール ファイルに含まれています。正常にインストールするにはJAVA_HOME システム変数が正しいパスを使用しており、64 ビット Java インストールを指している必要があります。
FMS はクライアント-サーバーインストールでのみ使用が可能で、ステーション セットアップのインストールでは使用できません。
インストールアーキテクチャ
クライアント/サーバーおよびClickOnce
StationSetup

インストールオプション クライアント/サーバーおよびClickOnce
クライアント、サーバー、ACDCは別々
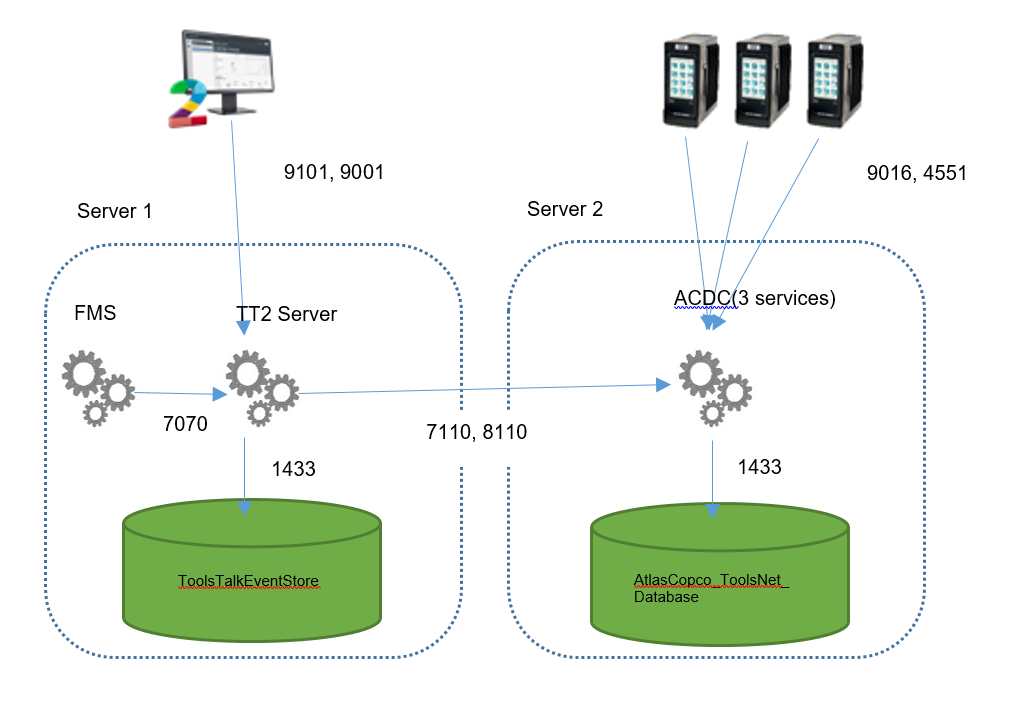
サーバーおよびACDCは同一のサーバー
インストールとアップグレード
インストールの種類
ToolsTalk 2には4つの異なる実行戦略に対応する4つの異なる実行可能ファイルがあります。
クライアント
サーバー
サーバーおよびClickOnceクライアント
スタンドアロンステーションのセットアップ
共通の機能として、すべてのセットアップは、InstallShieldソフトウェアで作成されたMicrosoft標準のMSI実行可能ファイルです。
インストールの条件
InstallShield MSI実行可能ファイルには、インストーラーパッケージのタイプに応じて、実行前の前提条件があります。これらの条件は次のとおりです:
システムでのJavaのインストールと構成セットアップ
要件と確認 | クライアント | サーバー | サーバーおよびClickOnce | Station Setup |
|---|---|---|---|---|
.NET 8 | X | X | X | X |
Javaインストールのチェック | - | X | X | - |
Installshieldがインストールされたコンピューターでこれらのコンポーネントを見つけることができない場合、Installshieldはユーザーに通知し、不足しているコンポーネントについて通知します。上記のソフトウェアの依存関係がない場合、セットアップを続行できません。インストーラはユーザーに通知し、セットアップを停止します。
インストールプロセスの説明
InstallShield
InstallShield MSI 行可能ファイルはすべて、ToolsTalk 2 実行可能ファイルを、事前定義されたフォルダーの場所(デフォルトはProgram Files\Atlas Copcoフォルダー)、およびインストールの種類 のセクションにリストされているセットアップタイプに関連付けられた新しいフォルダー内に追加します。
アップグレード用に既存のインストールを識別するため、必要なレジストリ設定をシステムに配置する必要があります。データベースはすぐには作成されませんが、Installation Configuratorの実行後に作成されます。
コンピューターへのインストールが正常に完了したら、最後のステップはInstallation Configuratorを実行することです。
機能とスクリプト | クライアント | サーバー | サーバーおよびClickOnce | Station Setup |
|---|---|---|---|---|
クライアントアセンブリのインストール | x | - | x | x |
サーバーアセンブリのインストール | - | x | x | x |
FMSアセンブリのインストールとサービスの開始 | - | x | x | - |
Installation Configuratorアセンブリのインストール | x | x | x | x |
ClickOnceアプリケーションのインストール | - | - | x | - |
証明書の登録 | - | - | x | - |
Installation Configuratorの実行 | x | x | x | x |
ACDC共通コンポーネント | - | - | - | x |
ToolsTalk 2 Station Setup固有のデータベース操作 | - | - | - | x |
ToolsTalk 2 Station Setup データベース操作には、ToolsTalk 2およびアトラスコプコのデータ通信の両方に必要なデータベース操作の作成が含まれます。
Installation Configurator
インストール手順の後、Installation Configuratorが自動的に起動し、ユーザーはToolsTalk 2ソフトウェアを構成できるようになります。後でWindowsのスタートメニューからコンフィギュレーターを起動して、設定と構成を変更することもできます。
関連情報
アップグレードプロセスの説明
アップグレードの定義
コンピュータ上の既存のToolsTalk 2インストールの新しいバージョンは、既存のインストールを検索し、インストールがアップグレードまたは新規インストールのように動作するかどうかを決定する必要があります。MSI固有のルールセットを実行して、インストールがアップグレードであるか新規インストールであるかを判断する必要があります。
バージョン番号から、アップグレードがメジャーアップグレードかマイナーアップグレードかを判断できます。
例:2.21.2から2.21.3はマイナーアップグレードですが、2.21から2.22はメジャーアップグレードです。この違いは、データベースのアップグレード操作でのみ重要となります。マイナーアップグレード中はデータベースのアップグレードは必要ないため、操作は発生しません。
InstallShield
セクションで説明されているすべてのインストールの種類に共通するように、システム内のインストールの種類アセンブリは新しいバージョンにアップグレードする必要があります。
インストールの種類に応じて、アセンブリの更新に加えて次の操作を実行する必要があります:
FMS のアンインストールと再インストール (FMS アセンブリをインストールするセットアップの種類については、インストールプロセスの説明セクションを参照してください)
データベースの移行 (サーバーおよび ServerClickOnce のインストール中)
データベースの移行
ServerおよびServerClickOnceパッケージのインストール中、データベース移行操作はToolsTalk 2アプリケーションのデータベースのアップグレードを開始します。この操作は、メジャーアップグレード中にのみ実行されます。
Installation Configurator
以下の構成の変更は、インストールコンフィギュレーターによって有効になります:
ToolsTalk 2SQLデータベース設定
SQL サーバーアドレス
ToolsTalk 2データベース名
データベースのインストール
ToolsTalk 2サーバーの設定
認証モード
Windows認証で使用されるActive Directory
ToolsTalk 2サーバーアドレス
ToolsTalk 2サーバー Web アプリケーション ポート
HTTPS の有効化
サーバー認証証明書
コントローラーポート
サービスURLをIPアドレスに変換するための設定
Power Focus Web サーバー: 代替ポート
ClickOnce: 証明書 (オプション)
ToolsTalk 2バックアップの設定
コントローラーバックアップフォルダー
ACDC設定
ACDC サーバーアドレス
ACDC WebAPI ポート
ACDC SignalR ポート
Exchange サーバー設定
検証
ACDC 構成を使用する
FMS設定
ホスト ID 情報を取得する
デフォルトのホストID
利用可能なホストIDのリスト
アクティブなホストID
アクティブなホスト ID の更新
最後に使用されたアクティブなホスト D
アクティブなホストIDを変更する可能性
上記の設定および構成の一部は、ToolsTalk 2の異なるバージョンでは使用できない場合があります。
ユーザーが構成を変更した場合、[保存]ボタンを選択して変更を適用します。構成を保存する際、Installation Configuratorは
関連する構成ファイルを新しい値で更新します
すべての設定のコピーを Storageという名前のファイルにローカルに保存します
ToolsTalk 2サーバーを起動して、新しい構成変更を取得します
起動時、インストールコンフィギュレーターは常にストレージファイルに保存されている構成と、インストールフォルダに存在する構成ファイルを比較します。それらが異なる場合は、インストールコンフィギュレーターに読み込むものを選択するようにユーザーに求めます。[保存]ボタンを選択すると、インストールフォルダー内のストレージファイルと構成ファイルの両方が同じ設定と構成になります。
関連情報
ToolsTalk 2のインストール
このインストールガイドは、ClickOnce アプリケーション、サーバー、クライアント、または Station Setup のインストール、並びに SQL サーバーのセットアップ、Atlas Copco データ通信の構成、JAVA のインストールの補助となります。
ガイドは、インストールのさまざまな段階と、実行する必要がある順序を示すように説明されています。
インストール手順
ToolsTalk 2アプリケーションのインストール順序はいずれも、次の通りです:
インストールする前に、コンピュータとデータベースの要件がすべて満たされていることを確認してください。
Microsoft SQLサーバーをインストールします。

正しいインストール手順については、 https://docs.microsoft.com/en-us/sql/database-engine/install-windows/install-sql-server?view=sql-server-ver15を参照してください 。
必要に応じて、Atlas Copco Data Communicationをインストールします。
詳細については、「Atlas Copco Data Communicationインストールガイド」を参照してください。
必要なToolsTalk 2アプリケーションをインストールします。
ToolsTalk 2クライアントアプリケーションをインストールする場合はToolsTalk 2アプリケーションを展開します。またはスタートメニューからアプリケーションを実行し、必要に応じてショートカットを作成します。
ご購入の正しい機能を使用するため、ToolsTalk 2アプリケーションをライセンス登録します。
Atlas Copco Data Communicationのインストール
アトラスコプコインストールガイドを参照して、Atlas Copco Data Communication アプリケーションをインストールします。
JAVAのインストールと構成
JAVAをダウンロードしてインストールします。
Windowsで[コントロールパネル] \ [システムとセキュリティ] \ [システム]に移動し、[システムの詳細設定]を選択します。
[環境変数...]を選択します。

[システム変数]で、[新規...]を選択します。
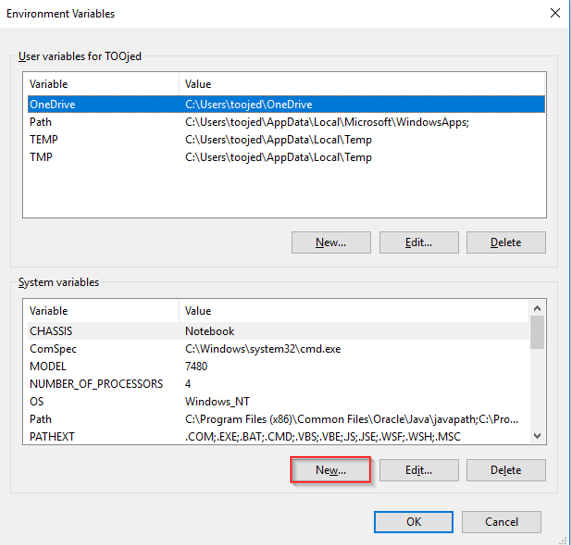
「新しいシステム変数」ダイアログで、「変数名」フィールドに JAVA_HOME を入力します。「ディレクトリーの参照」オプションを使用して、JAVAインストールフォルダーを見つけます。
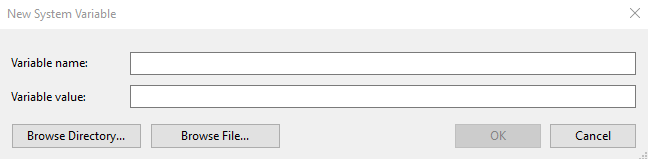
[OK] を選択して続行します。
以下の画像に示すように、JAVA_HOME が[システム変数]セクションに追加されます。
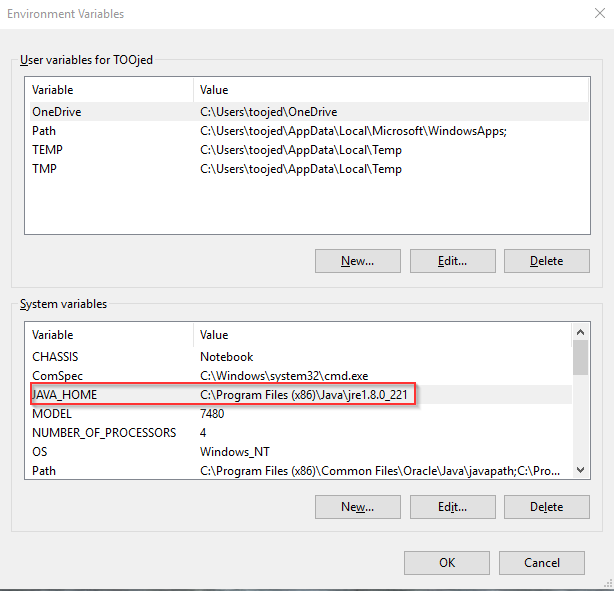
[OK] を選択して続行します。
ソフトウェアのインストール
ToolsTalk2構成ウィンドウ
ToolsTalk 2構成では、最初にToolsTalk 2 ソフトウェアのインストールを完了してから、別のインストールパラメータを設定することができます。各インストールタイプのToolsTalk 2構成は、インストール後にスタートメニューのショートカットとして使用できるため、いつでもアクセスしてインストールパラメータを変更できます。
既定のインストール場所
設置 | 既定の場所 | 備考 |
|---|---|---|
ToolsTalk 2 サーバー | C:\Program Files\Atlas Copco\ToolsTalk Server\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 ClickOnce | C:\Program Files\Atlas Copco\ToolsTalk ClickOnce\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 クライアント | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 StationSetup | C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ | ユーザー指定の場所に変更可能です |
AtlasCopco FMS | C:\ProgramData\AtlasCopcoFMS\ | 既定のパスは変更しないでください! |
Flexera Logs | C:\Windows\ServiceProfiles\NetworkService\Flexnetls\acopco\logs | 既定のパスは変更しないでください! |
ToolsTalk サーバーアプリケーションのインストール
ToolsTalk 2 サーバーのインストール開始前に、インストールまたはアップグレード開始前のセクションに記載の要件を満たしていることを確認してください。
サーバーアプリケーションをインストールする前に、Atlas Copco Data Communication (ACDC) がインストールされており、現バージョンのToolsTalk 2 (2.13以降のバージョンのみ) と互換性があることを確認してください。Atlas Copco Data Communication インストールのユーザーガイドを参照してください。
実行可能ファイル ToolsTalkServer<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、Atlas Copco の Tools Talk サーバー - InstallShield ウィザードのウィンドウで [次へ] を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files\Atlas Copco\ToolsTalk Server\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了すると、[ToolsTalk 2 の構成] ウィンドウが開きます。あるいは、Windows から [ユーザーアクセス コントロール] ダイアログが表示される場合もあります。
Windows でアクセス許可を要求するユーザーアクセス コントロールのダイアログが表示されたら、[このアプリによるデバイスへの変更を許可しますか?]に対して[はい] を選択します。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
[FMS]タブにパラメータを入力します。[ホストID情報の取得]を選択してFMSを開始し、ホストIDを取得します。
ホストIDを変更する場合は、[ホストID]ドロップダウン リストから選択し、[アクティブなホストIDの更新]を選択して、必要に応じてアクティブなホストID を更新します。
[データベース設定]にパラメータを入力します。
SQL Serverアドレスやデータベース名のパラメータが追加/更新されると、自動的に保存されます。
データベース資格情報にパラメータ、 ユーザー名とパスワードを入力し、[接続のテスト]を選択します。
ユーザー名とパスワードは、Microsoft SQL Serverのインストールに使用したものと同じである必要があります。
[接続のテスト]を選択すると、コンフィギュレーターは、指定されたユーザー名とパスワードが正しいかどうかを確認します。テスト接続が失敗した場合、エラーメッセージ「 データベース接続テストに失敗しました。詳細についてはログファイルを参照してください! 」が表示されます。
[データベースのインストール] を選択します。
データベースが正常にインストールされると、「データベースの作成に成功しました」というメッセージが表示されます。
[サーバー設定]タブでパラメータを入力します。
ToolsTalk 2 サーバーと ClickOnce で Web API の HTTPS を有効にするには、「HTTPS の有効化」を選択し、ToolsTalk サーバーがインストールされている Windows マシン、ローカルコンピューターの [証明書ストア] > [個人] から証明書を選択します。Atlas Copco Data Communication Service をインストールする前に証明書を設定する必要があります。証明書は自動的に生成されません。証明書にはサーバー認証の目的が含まれている必要があります。
[ACDC設定]タブでパラメータを入力します。
[保存]を選択すると、[ステータス]タブが表示されます。
初めてインストールを実行するときに、[FMS]、[データベース設定] 、および[サーバー設定]タブにすべてのパラメーターを入力する前に[ステータス]タブを選択すると、ステータスがグレー表示され、次のエラーが表示されます: 「インストールが完了していません。インストールを終了すると、ステータスが表示されます。」
FMS
ToolsTalk サーバーアプリケーションのインストールは、ライセンスのFMSサービスに依存します。FMSサービスは、ライセンスの識別と設定にホストIDと呼ばれるシステム識別子を使用します。ToolsTalk 2で利用可能な機能は特定のクライアントが使用するホストIDに関連付けられており、この値はアトラスコプコのライセンスポータルに登録されています。ホストIDを変更する場合は、古いホストIDを置き換えることにより、新しいホストIDをアトラスコプコのライセンスポータルに登録する必要があります。これにより、古いホストIDに関連付けられているすべての機能が新しいホストIDに移動します。
この機能により、過去に使用されたホストID、現在使用されているアクティブホストID、およびデフォルトのホストIDのリストを読み取ることができます。また、ネットワークインターフェイス要件に合わせて、必要に応じて、アクティブホストIDを変更することも可能になります。
[ホストID情報の取得]を選択して、使用されているアクティブなホストIDを取得します。
パラメーター | 説明 |
|---|---|
デフォルトのホストID | 登録されているデフォルトのホストID。デフォルトのホストIDは、マシン上で使用可能な任意のホストIDにすることができます。通常、ホストIDのリストの最初のホストIDです。 |
ホスト ID | さまざまなネットワークインターフェイスに応じて、特定のマシンで利用可能な利用可能なホストIDのリスト。 |
アクティブなホストID | アクティブで使用中の現在のホストID。指定されている場合、 デフォルトのホストIDはアクティブなホストIDによって上書きされます |
最後に使用されたアクティブなホストID | 最後に使用されたアクティブなホストIDがどれかを示します。 |
アクティブなホストIDを変更するには:
[ホスト ID] ドロップダウンから目的のホスト ID を選択します。
これは、[アクティブなホストID]フィールドにも反映されます。
[アクティブなホストIDの更新]を選択します。
[保存] を選択します。
これでアクティブなホストIDが変更され、FMSサービスを再起動して新しい設定を適用することができます。
サーバー設定パラメータ
パラメーター | 説明 |
|---|---|
認証モード | ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。 |
Active Directoryグループ | 選択した認証モードが Windows の場合にのみ表示されます。ユーザーが所属する必要があるアクティブ ディレクトリ グループを指定します。例:常に「ドメイン名\ グループ名」の形式にする必要があります。 選択した認証モードがWindowsの場合、Active Directoryグループが正しいかどうか、および使用するユーザーアカウントがActive Directoryグループに属しているかどうかをテストできます。 Active Directoryグループを入力し、[ADグループのテスト]を選択します。 ユーザーアカウントを入力して[テスト]を選択し、Active Directoryグループとグループ名を確認します。 ユーザーが間違ったドメイン名または間違ったグループ名、あるいはその両方を入力した場合、エラーメッセージが表示されます。入力したドメイン名とグループ名は正しいものの、入力したユーザーアカウントがそのActive Directoryグループに属していない場合も、エラーが表示されます。 テストに合格した場合、情報メッセージが表示されます。 |
サーバーアドレス | ToolsTalk 2 サーバーの IP アドレスまたはホスト名 |
Web アプリケーション ポート | ToolsTalk 2用の通信ポート ToolsTalk サーバーのテストを選択して、 ToolsTalk 2サーバーが稼働しているかどうかを確認します。この機能は、入力したサーバーアドレスとWebアプリケーションポートが正しく機能しているかどうかをテストおよび検証します 。 もしToolsTalk 2サーバーが稼働している場合、テストに合格したこと、およびToolsTalk 2サーバーで問題が発生したかどうかを示す情報メッセージが表示されます。エラーメッセージはログファイルに詳細情報とともに表示されます。 |
コントローラポート | ポート9016は、デフォルトのコントローラポートとして使用されます。ポート9016を使用する場合は、このポートが開いていることを確認して接続可能であることを確認してください。そうしないと、アプリケーションは機能しません。 ポート80は、ToolsTalk 2のコントローラーの接続/切断/追加機能を使用して、コントローラーと対話する場合に使用されます。 Atlas Copco Data Communicationで設定されているコントローラポートと同じではないコントローラポートを入力すると、警告が表示されます。ToolsTalk 2とAtlas Copco Data Communicationのコントローラーポートが同じであることを確認します。 ポート 80 はインストール時に変更できます。詳細については、「設置の前提条件」を参照してください。 |
入力するコントローラポートが開いており、接続できることを確認してください!
パラメーター | 説明 |
|---|---|
コントローラのバックアップフォルダー | コントローラのバックアップが配置されるフォルダーを指定します。 |
Active Directory グループと コントローラのバックアップフォルダ は、既定では空になっています。
ACDC設定
パラメーター | 説明 |
|---|---|
サーバーアドレス | Atlas Copco Data Communication サーバーの IP アドレスまたはホスト名 |
Web APIポート | Web API用ポート |
ACDC Exchangeサーバー設定の検証
Exchangeサーバー設定のパラメーターは、Atlas Copco Data Communication と ToolsTalk 2 の両方で同じである必要があります。[ACDC設定]タブの[検証]オプションを使用すると、パラメーターが同じであるかどうかを確認できます。
[Exchange サーバー設定]フィールドでパラメータを入力します。
[検証]を選択します。
入力されたパラメータが正しければ、検証は成功します。
入力されたパラメータがAtlas Copco Data Communicationに存在するものと同じでない場合は、「構成値が対応する ACDC 値と等しくありません」というエラーが表示されます。
検証に失敗した場合は、[ACDC 構成を使用する] を選択します。
これにより、ToolsTalk 2 Exchange サーバー構成内の誤ったパラメータが、ACDC 構成に存在するパラメータに置き換えられます。
パラメーター | 説明 |
|---|---|
Exchangeサーバーのトピック名 | Atlas Copco Data Communication と ToolsTalk 2 間の通信に使用されるExchangeサーバーのトピック名 |
Exchange サーバーアドレス | Exchange サーバーの IP アドレス |
Exchange サーバーポート | Exchange サーバーのポート |
Exchangeサーバーのユーザー名 | Exchangeサーバーへのアクセスに使用されるユーザー名。 |
Exchangeサーバーのパスワード | Exchangeサーバーのパスワード。 |
データベースのインストール設定
パラメーター | 説明 |
|---|---|
SQL サーバーアドレス | SQL サーバーの IP アドレスまたはホスト名 Microsoft Windows Defender ファイアウォールは、ネットワークを介した SQL Server への接続を禁止します。したがって、TCP/IP を使用して接続を受け入れるように SQL Server を構成する必要があります。この設定は、[Windows コンピュータの管理] の [SQL Server 構成マネージャー] のセクションで変更できます。 コンピュータの管理 → SQL Server構成マネージャー → SQL Serverネットワーク構成 → MSSQLSERVERのプロトコル → TCP/IP → 有効 |
データベース名 | ToolsTalk 2によって使用されるデータベース/カタログデータベースが存在しない場合は、データベースのインストール中にデータベースが作成されます。 |
パラメーター | 説明 |
|---|---|
ユーザー名 | データベース/カタログを作成するための資格情報を持つデータベース ユーザーのユーザー名。通常、システム管理者の資格情報を指します。 |
パスワード | パスワードを入力します。通常、システム管理者の資格情報を指します |
パラメーター | 説明 |
|---|---|
手動スクリプト | データベースが手動で作成されたかどうかを指定します。 このボックスをチェックすると、ToolsTalk 2 はすでに SQL カタログとデフォルトユーザーを手動で作成していると想定します。入力したユーザー名とパスワードは、SQL サーバーに接続する既定の資格情報であり、構成ファイルにクリア テキストで格納されます。 この設定は、データベースカタログとユーザーを自分で作成した場合にのみ使用してください。 |
ToolsTalk 2アプリケーションは、[スタート] メニューにあります。
ステータス
パラメーター | 説明 |
|---|---|
リフレッシュ | ステータスビューを更新し、関連するサービスを最新のステータスに更新します。 |
開始 | 初めてサービスを開始します。 |
停止 | サービスを停止します。 |
再起動 | 停止したサービスを再起動します。 |
Atlas Copco Data Communication が ToolsTalk 2 と異なるサーバーにインストールされている場合、Atlas Copco Data Communication Service のステータスを表示または変更することはできません。
クライアントアプリケーションのインストール
ToolsTalk 2 クライアントのインストール開始前に、インストールまたはアップグレード開始前のセクションに記載の要件を満たしていることを確認してください。
実行可能ファイル ToolsTalkClient<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、Atlas Copco の Tools Talk サーバー - InstallShield ウィザードのウィンドウで [はい] を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。デフォルトの場所はC:\Program Files (x86)\Atlas Copco\ToolsTalk Client\です
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了します。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
[クライアント設定] にパラメータを入力し、[保存] を選択します。
サーバー設定 パラメーター
説明
認証モード
ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。
サーバーアドレス
ToolsTalk 2 サーバーの IP アドレスまたはホスト名
Web アプリケーション ポート
ToolsTalk 2用の通信ポート
ToolsTalk サーバーのテストを選択して、 ToolsTalk 2サーバーが稼働しているかどうかを確認します。この機能は、入力したサーバーアドレスとWebアプリケーションポートが正しく機能しているかどうかをテストおよび検証します 。
もしToolsTalk 2サーバーが稼働している場合、テストに合格したこと、およびToolsTalk 2サーバーで問題が発生したかどうかを示す情報メッセージが表示されます。エラーメッセージはログファイルに詳細情報とともに表示されます。
HTTPS の有効化
クライアントと ToolsTalk サーバー間の HTTPS 通信は、[HTTPS の有効化] を選択すると有効になります。この機能を使用するには、ToolsTalk サーバーで HTTPS を有効にする必要があります。ToolsTalk サーバーで HTTPS 通信を設定する方法の詳細については、ToolsTalk サーバーアプリケーションのインストール を参照してください。
ToolsTalk サーバーで HTTPS が有効になっており、ClickOnce クライアントが使用されている場合、これらのクライアントは自動的に HTTPS を使用するように構成されます。
サービス URL を IP アドレスに変換する
オンまたはオフ。[オン] を選択すると、アドレスでホスト名が使用されている場合は、IP アドレスに変換されます。
ToolsTalk 2アプリケーションがインストール済みで、デスクトップでショートカットが利用可能です。
サーバーClickOnce を使用したクライアントのインストール
2.21.3 より前のリリースに関する重要なお知らせ:
ClickOnce インストーラーの署名に使用された証明書は、これらのリリースで期限切れになりました。既存のサーバー/クライアントのインストールは引き続き機能しますが、新しいクライアントをインストールすると、警告ダイアログに「不明な発行元」が表示されます。システムが信頼できる証明書で署名されたアプリケーションのインストールのみを許可している場合、新しいクライアントをインストールすることはできません。これらの問題を解決するには、リリース 2.21.3 以降にアップグレードし、信頼できる証明書を割り当ててください。アップグレード後にクライアントを再インストールする必要があります。詳細については、以下の「ClickOnce クライアント」を参照してください。
クライアントのインストール
実行可能ファイル ToolsTalkServerClickOnce<xxx>.exe をコンピューターの目的のフォルダーに保存します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、Atlas Copco Tools Talk サーバー ClickOnce - InstallShield ウィザードのウィンドウで [次へ] を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files\Atlas Copco\ToolsTalk ClickOnce\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了すると、[ToolsTalk 2 の構成] ウィンドウが開きます。あるいは、Windows から [ユーザーアクセス コントロール] ダイアログが表示される場合もあります。
Windows でアクセス許可を要求するユーザーアクセス コントロールのダイアログが表示されたら、[このアプリによるデバイスへの変更を許可しますか?]に対して[はい] を選択します。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
[FMS]タブにパラメータを入力します。[ホストID情報の取得]を選択してFMSを開始し、ホストIDを取得します。
ホストIDを変更する場合は、[ホストID]ドロップダウン リストから選択し、[アクティブなホストIDの更新]を選択して、必要に応じてアクティブなホストID を更新します。
[データベース設定]にパラメータを入力します。
SQL Serverアドレスやデータベース名のパラメータが追加/更新されると、自動的に保存されます。
データベース資格情報にパラメータ、 ユーザー名とパスワードを入力し、[接続のテスト]を選択します。
ユーザー名とパスワードは、Microsoft SQL Serverのインストールに使用したものと同じである必要があります。
[接続のテスト]を選択すると、コンフィギュレーターは、指定されたユーザー名とパスワードが正しいかどうかを確認します。テスト接続が失敗した場合、エラーメッセージ「 データベース接続テストに失敗しました。詳細についてはログファイルを参照してください! 」が表示されます。
[データベースのインストール] を選択します。
データベースが正常にインストールされると、「データベースの作成に成功しました」というメッセージが表示されます。
[サーバー設定]タブでパラメータを入力します。
[ACDC設定]タブでパラメータを入力します。
[保存]を選択すると、[ステータス]タブが表示されます。
初めてインストールを実行するときに、[FMS]、[データベース設定] 、および[サーバー設定]タブにすべてのパラメーターを入力する前に[ステータス]タブを選択すると、ステータスがグレー表示され、次のエラーが表示されます: 「インストールが完了していません。インストールを終了すると、ステータスが表示されます。」
FMS
ToolsTalk サーバーアプリケーションのインストールは、ライセンスのFMSサービスに依存します。FMSサービスは、ライセンスの識別と設定にホストIDと呼ばれるシステム識別子を使用します。ToolsTalk 2で利用可能な機能は特定のクライアントが使用するホストIDに関連付けられており、この値はアトラスコプコのライセンスポータルに登録されています。ホストIDを変更する場合は、古いホストIDを置き換えることにより、新しいホストIDをアトラスコプコのライセンスポータルに登録する必要があります。これにより、古いホストIDに関連付けられているすべての機能が新しいホストIDに移動します。
この機能により、過去に使用されたホストID、現在使用されているアクティブホストID、およびデフォルトのホストIDのリストを読み取ることができます。また、ネットワークインターフェイス要件に合わせて、必要に応じて、アクティブホストIDを変更することも可能になります。
[ホストID情報の取得]を選択して、使用されているアクティブなホストIDを取得します。
パラメーター | 説明 |
|---|---|
デフォルトのホストID | 登録されているデフォルトのホストID。デフォルトのホストIDは、マシン上で使用可能な任意のホストIDにすることができます。通常、ホストIDのリストの最初のホストIDです。 |
ホスト ID | さまざまなネットワークインターフェイスに応じて、特定のマシンで利用可能な利用可能なホストIDのリスト。 |
アクティブなホストID | アクティブで使用中の現在のホストID。指定されている場合、 デフォルトのホストIDはアクティブなホストIDによって上書きされます |
最後に使用されたアクティブなホストID | 最後に使用されたアクティブなホストIDがどれかを示します。 |
アクティブなホストIDを変更するには:
[ホスト ID] ドロップダウンから目的のホスト ID を選択します。
これは、[アクティブなホストID]フィールドにも反映されます。
[アクティブなホストIDの更新]を選択します。
[保存] を選択します。
これでアクティブなホストIDが変更され、FMSサービスを再起動して新しい設定を適用することができます。
データベース設定
パラメーター | 説明 |
|---|---|
SQL サーバーアドレス | SQL サーバーの IP アドレスまたはホスト名 Microsoft Windows Defender ファイアウォールは、ネットワークを介した SQL Server への接続を禁止します。したがって、TCP/IP を使用して接続を受け入れるように SQL Server を構成する必要があります。この設定は、[Windows コンピュータの管理] の [SQL Server 構成マネージャー] のセクションで変更できます。 コンピュータの管理 → SQL Server構成マネージャー → SQL Serverネットワーク構成 → MSSQLSERVERのプロトコル → TCP/IP → 有効 |
データベース名 | ToolsTalk 2によって使用されるデータベース/カタログデータベースが存在しない場合は、データベースのインストール中にデータベースが作成されます。 |
パラメーター | 説明 |
|---|---|
ユーザー名 | データベース/カタログを作成するための資格情報を持つデータベース ユーザーのユーザー名。通常、システム管理者の資格情報を指します。 |
パスワード | パスワードを入力します。通常、システム管理者の資格情報を指します |
パラメーター | 説明 |
|---|---|
手動スクリプト | データベースが手動で作成されたかどうかを指定します。 このボックスのチェックマークがオンになっている場合、ToolsTalk 2 はすでに SQL カタログとデフォルトユーザーを手動で作成していると想定します。入力したユーザー名とパスワードは、SQL サーバーに接続する既定の資格情報であり、構成ファイルにクリア テキストで格納されます。 この設定は、データベースカタログとユーザーを自分で作成した場合にのみ使用してください。 |
サーバー設定
パラメーター | 説明 |
|---|---|
認証モード | ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。 [なし]を選択すると、認証モードは有効になりません。インストール後に認証モードを有効にする場合は、ToolsTalk 2の[構成]ウィンドウで設定を変更する前に、各ユーザーのクライアントをアンインストールする必要があります。クライアントを再インストールする前に、必ずクライアントを再署名してください。 |
Active Directoryグループ | 選択した認証モードが Windows の場合にのみ表示されます。ユーザーが所属する必要があるアクティブ ディレクトリ グループを指定します。例:常に「ドメイン名\ グループ名」の形式にする必要があります。 選択した認証モードがWindowsの場合、Active Directoryグループが正しいかどうか、および使用するユーザーアカウントがActive Directoryグループに属しているかどうかをテストできます。 Active Directoryグループを入力し、[ADグループのテスト]を選択します。 ユーザーアカウントを入力して[テスト]を選択し、Active Directoryグループとグループ名を確認します。 ユーザーが間違ったドメイン名または間違ったグループ名、あるいはその両方を入力した場合、エラーメッセージが表示されます。入力したドメイン名とグループ名は正しいものの、入力したユーザーアカウントがそのActive Directoryグループに属していない場合も、エラーが表示されます。 テストに合格した場合、情報メッセージが表示されます。 |
サーバーアドレス | ToolsTalk 2 サーバーの IP アドレスまたはホスト名サーバーに保存されているアドレス間のドロップダウンで選択するか、新しいアドレスを入力します。 |
Web アプリケーション ポート | ToolsTalk 2用の通信ポート ToolsTalk サーバーのテストを選択して、 ToolsTalk 2サーバーが稼働しているかどうかを確認します。この機能は、入力したサーバーアドレスとWebアプリケーションポートが正しく機能しているかどうかをテストおよび検証します 。 もしToolsTalk 2サーバーが稼働している場合、テストに合格したこと、およびToolsTalk 2サーバーで問題が発生したかどうかを示す情報メッセージが表示されます。エラーメッセージはログファイルに詳細情報とともに表示されます。 |
HTTPS の有効化 | ClickOnce クライアントの場合、クライアントと ToolsTalk サーバー間の HTTPS 通信は ToolsTalk サーバーで有効します。 ToolsTalk サーバーで HTTPS 通信を設定する方法については、ToolsTalk サーバーアプリケーションのインストール を参照してください。 |
コントローラポート | ポート9016は、デフォルトのコントローラポートとして使用されます。ポート9016を使用する場合は、このポートが開いていることを確認して接続可能であることを確認してください。そうしないと、アプリケーションは機能しません。 ポート80は、ToolsTalk 2のコントローラーの接続/切断/追加機能を使用して、コントローラーと対話する場合に使用されます。 Atlas Copco Data Communicationで設定されているコントローラポートと同じではないコントローラポートを入力すると、警告が表示されます。ToolsTalk 2とAtlas Copco Data Communicationのコントローラーポートが同じであることを確認します。 |
サービス URL を IP アドレスに変換する | オンまたはオフ。[オン] を選択すると、アドレスでホスト名が使用されている場合は、IP アドレスに変換されます。 |
入力するコントローラポートが開いており、接続できることを確認してください。
パラメーター | 説明 |
|---|---|
コントローラのバックアップフォルダー | コントローラのバックアップが配置されるフォルダーを指定します。 |
Active Directory グループと コントローラのバックアップフォルダ は、既定では空になっています。
パラメーター | 説明 |
|---|---|
サーバーアドレス | Atlas Copco Data Communication サーバーの IP アドレスまたはホスト名 |
Web APIポート | Web API用ポート |
ACDC Exchangeサーバー設定の検証
Exchangeサーバー設定のパラメーターは、Atlas Copco Data Communication と ToolsTalk 2 の両方で同じである必要があります。[ACDC設定]タブの[検証]オプションを使用すると、パラメーターが同じであるかどうかを確認できます。
[Exchange サーバー設定]フィールドでパラメータを入力します。
[検証]を選択します。
入力されたパラメータが正しければ、検証は成功します。
入力されたパラメータがAtlas Copco Data Communicationに存在するものと同じでない場合は、「構成値が対応する ACDC 値と等しくありません」というエラーが表示されます。
検証に失敗した場合は、[ACDC 構成を使用する] を選択します。
これにより、ToolsTalk 2 Exchange サーバー構成内の誤ったパラメータが、ACDC 構成に存在するパラメータに置き換えられます。
パラメーター | 説明 |
|---|---|
Exchangeサーバーのトピック名 | Atlas Copco Data Communication と ToolsTalk 2 間の通信に使用されるExchangeサーバーのトピック名 |
Exchange サーバーアドレス | Exchange サーバーの IP アドレス |
Exchange サーバーポート | Exchange サーバーのポート |
Exchangeサーバーのユーザー名 | Exchangeサーバーへのアクセスに使用されるユーザー名。 |
Exchangeサーバーのパスワード | Exchangeサーバーのパスワード。 |
ClickOnce クライアントリンクへのリンクをコピーしてユーザーに送信し、ユーザーが ClickOnce クライアントをダウンロードできるようにすることが出来ます。
パラメーター | 説明 |
|---|---|
証明書パスワード (2.21.3 以降): | カスタム証明書が指定されている場合は、証明書のパスワードをここで指定します。 オプションで、ClickOnce クライアントファイルの署名に使用する、パスワードで保護された PFX 証明書を指定します。システムで信頼されている証明書を指定すると、クライアントのインストール中に警告は表示されます。信頼できる署名のないアプリケーションのインストールを妨げるシステムでも、インストールできます。証明書を割り当てない場合は、証明書の代わりにアトラスコプコの自己署名証明書 (信頼できない) を使用できます。信頼されたカスタム証明書を使用することをお勧めします。 証明書を変更するとクライアントを再インストールする必要があるため、新しいバージョンにアップグレードするときには同じ証明書を指定することをお勧めします。 |
リンクをコピーする | ClickOnceクライアントへのリンクをコピーします。 |
サイン | 必要に応じて、ClickOnceクライアントにサインインするために使用することができ、ClickOnceクライアントへのリンクが再び利用できるようになります。 |
ステータス
パラメーター | 説明 |
|---|---|
リフレッシュ | ステータスビューを更新し、関連するサービスを最新のステータスに更新します。 |
開始 | 初めてサービスを開始します。 |
停止 | サービスを停止します。 |
再起動 | 停止したサービスを再起動します。 |
Atlas Copco Data Communication が ToolsTalk 2 と異なるサーバーにインストールされている場合、Atlas Copco Data Communication Service のステータスを表示または変更することはできません。
リモートマシンへのクライアントの展開
Web ブラウザーで次のリンクを使用してサーバーに行きます:
http://<FULL COMPUTER NAME>:<PORT NUMBER>/deploym

<フル コンピューター名> および <ポート番号>を入れ替えます。
<フル コンピューター名> はサーバーとデータベースの位置する場所と完全に一致することを確認します。フルコンピューター名 [TOOLSE277256.ATLASCOPCO.COM] またはコンピューター名 [TOOLSE277256] が設定されている場合、DNS サーバーが存在し、コントローラーに設定されている必要があります。そうでない場合、ToolsTalk 2 環境にコントローラーを追加することはできません。
実行可能ファイル ToolsTalk.Client.WPF.Desktop.application をコンピューターに保存します。
実行可能ファイルをダブルクリックするか、促された場合は開く を選択します。
ToolsTalk 2 クライアントはインストールされている最新バージョンを開きます。
ToolsTalk 2 クライアントは ClickOnce を使用して常に最新バージョンのサーバーで開きます。
ローカルマシンへのクライアントの展開
ClickOnceがデフォルトのフォルダーにインストールされている場合は、「 C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ClientDeploy 」に移動し、 ToolsTalk.Client.WPF.Desktopアプリケーションマニフェストファイルをダブルクリックしてクライアントを展開します。
インストールが完了すると、 ToolsTalk 2デスクトップにアイコンが作成されます。
Station Setup アプリケーションのインストール
縮小版 Station Setup のインストールにはコントローラ構成の全機能を備えていますが、いくつかの制限があります:
インストール全体のメモリ占有領域は小さくポータブル コンピューターにインストールできます。
同時に管理できるのは1つの物理的コントローラのみです。
コンピューターは通常の活動を妨害しないように、コントローラのサービスポートに接続されます。
用途
この操作モードでの一般的なアプリケーションには次が挙げられます:
コントローラには、ネットワークに接続せずに、ToolsTalk 2 使用してアクセス可能です。代わりにコントローラのサービスポートを使用してアクセスします。
コントローラ ライブラリ機能を使用したコントローラのオフライン構成です。構成ファイルは、検証用に後ほど実際のコントローラに転送できます。
コントローラ構成が簡単にエクスポートできるので、デバッグ作業に役立ちます。
ToolsTalk 2 Station Setup のインストール開始前またはアップグレード前に、インストール開始前のセクションに記載の要件を満たしていることを確認してください。
実行可能ファイル ToolsTalkStationSetup<xxx>.exe をコンピューターの目的のフォルダーに保存します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
このアプリがデバイスに変更を加えることを許可しますか? に対して [はい] を選択します
続行するには、アトラスコプコのTools Talkサーバー - InstallShield ウィザードのウィンドウで[次へ]を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
ToolsTalk2 アプリケーションのショートカットがデスクトップに表示されます。
[サーバー設定] タブにパラメータを入力し、[保存] を選択します。
入力するコントローラポートが開いており、接続できることを確認してください!
ToolsTalk 2アプリケーションは、[スタート] メニューにあります。
本セクション内
Station Setup の接続
ToolsTalk 2の Station Setupを備えたコンピューターはネットワークを通じて、またはサービスポートから直接コントローラに接続できます。
ネットワーク接続
コントローラのToolsTalk 2サーバー接続アドレスはこのコンピューターを指定する必要があります。指定は、コントローラ GUI または Web GUI から行います。
ToolsTalk 2 Station Setupを備えたコンピューターでは、同時に1台のコントローラのみ接続できます。ToolsTalk 2 Station Setupを備えたコンピューターにオンライン コントローラが接続されている場合、別のコントローラからの接続試行は無視されます。
コントローラサービスポートの接続
ToolsTalk 2を搭載したPCをネットワークに接続できない場合、コントローラサービスポートを使用してコントローラをToolsTalk 2に接続できます。たとえば、アトラスコプコまたは外部のサービス技師が工場を訪問し、外部コンピュータを工場ネットワークに接続することはできません。
コンピューターがコントローラのサービスポートに接続されている場合、コントローラは DHCP サーバーとして機能し、コンピューターに IP アドレスを提供します。このアドレスはToolsTalk 2接続用コントローラサーバー接続アドレスフィールドに入力する必要があります。
ファイル比較
コンフィギュレーターは、すべての構成設定のコピーをStorageという .xml ファイルとして保存します。このファイルは、製品構成 .xml ファイルの手動変更を識別するのに役立ちます。製品構成 .xml ファイルが変更されている場合、コンフィギュレーターを開始すると、[ファイル比較]ウィンドウが開き、[ストレージファイルを使用]または[構成ファイルを使用]のオプションが選択できます。
SoftPLC コンフィギュレータのインストール
コントローラーで SoftPLC 機能を使用できるようにするには、ToolsTalk 2 クライアントがインストールされているコンピューターに SoftPLC コンフィギュレーターをインストールする必要があります。
MultiProg551_Atlas_Installation の入ったUSB メモリまたは同様のものを挿入します。
MultiProg551_Atlas_Installation の Installation.bat をダブルクリックすると、インストールが開始します。
インストールが完了した際に ToolsTalk クライアントを開きます(再起動不要)。
ToolsTalk 2クライアントで、フィールドバスと SoftPLC
 タブに移動します。SoftPLC構成セクションを選択し、一般 SoftPLC の設定でSoftPLCをオンに設定します。
タブに移動します。SoftPLC構成セクションを選択し、一般 SoftPLC の設定でSoftPLCをオンに設定します。
関連情報
インストールの検証
Windows システムサービスの検証
バックグラウンド プログラムやサービスが正常に開始したことを確認するため、次の確認を行います:
Windowsの[検索]ボタンを選択します。
[検索ウィンドウ] 入力ボックスに「サービス」と入力します。
スクロールダウンして Atlas Copco Industrial Technique Host for ToolsTalk が開始したことを確認します。
このことはToolsTalk 2サーバーアプリケーションが実行中であることを示します。
スクロールダウンして FlexNet License server - acopco が開始したことを確認します。
このことは機能管理システム用ライセンスサーバー アプリケーションが実行中であることを示します。
クライアント-サーバーインストールの検証
ToolsTalk 2 アプリケーションのクライアント - サーバー バージョンが正常にインストール出来た後は、システムのテストにコントローラが必要となります。
サーバー コンピューターはネットワークに接続されている必要があります。
クライアント コンピューターはネットワークに接続されている必要があります。
コンピューターはネットワークに接続されていて、サーバーコンピューターと通信するように構成されている必要があります。
Atlas Copco Data Communicationサービスが開始されていることを確認します。
サーバーとクライアントは同じコンピューターにインストールすることが出来ます。
コントローラの構成とスタートについてはコントローラのユーザーガイドをご覧ください。
ToolsTalk 2 GUI 中でのスタートや移動に関する構成については ToolsTalk 2 ユーザーガイドをご覧ください。
ToolsTalk 2 クライアントがインストールされている場合、アプリケーションは次の方法で開始できます。
Windowsの[スタート]メニューを選択し、ToolsTalk 2フォルダーを見つけます。
ToolsTalk 2 のアイコン
 を選択してアプリケーションを起動します。
を選択してアプリケーションを起動します。
関連情報
Station Setup のインストール検証
ToolsTalk 2 Station Setup がインストールされている場合、アプリケーションは次の方法で開始できます。
Windowsの[スタート]メニューを選択し、ToolsTalk 2フォルダーを見つけます。
ToolsTalk 2 のアイコン
を選択してアプリケーションを起動します。
ToolsTalk 2 Station Setup のアプリケーションは、 ToolsTalk 2 クライアント アプリケーションまたは ToolsTalk 2 サーバーアプリケーションがインストールされている場合には実行できません。各インストール プログラムを実行して プログラムのメンテナンス ウィンドウ.の削除 のオプションを選択することで簡単に削除できます。
はじめに セクション(ToolsTalk 2ユーザーガイド) は Windows および Windows でのナビゲーションを説明しています。
ToolsTalk 2 Station Setup アプリケーションは、別のコントローラが接続されていない場合、多少異なります。構成マニュアルにあるライブラリ  のアイコンおよびコントローラ ライブラリ
のアイコンおよびコントローラ ライブラリ  のアイコンの下の情報をご覧ください。
のアイコンの下の情報をご覧ください。
ライセンスサービスの検証
この検証プロセスは、クライアント、サーバー、およびClickOnceアプリケーションのインストールにのみ適用され、ステーションセットアップのインストールには無効です。
ToolsTalk 2 のインストールが完了したら、起動時にライセンスサービスの準備ができていることを確認する必要があります。
Webブラウザーを開き、次の2つのページを参照して手順を完了します。
http://”ip-address:port"/api/1.0/health - このページには次が有ります。 「connectionCheck」 : 「success」、そうでない場合は、Flexeraサービスを再起動する必要があります。場合によっては、複数回の再起動が必要になることがあります。
http://”ip-address:port"/api/1.0/hostids - このページが空の場合は、Flexera サービスを再起動する必要があります。場合によっては、複数回の再起動が必要になることがあります。
この検証プロセスは、Station Setupのインストールには適用されません。
ソフトウェアのアンインストール
各モジュール(クライアント、サーバ、 Station Setup)は、次のようにアンインストールできます:
Windows コントロール パネル/プログラムと機能を使用して、目的のプログラムとモジュールを選んでアンインストールします。
一部のモジュールでは、変更を有効にするためにコンピュータの再起動が必要な場合があります。
ToolsTalk 2のアップグレード
ToolsTalk 2 のバージョン 2.21 より以前のバージョンからアップグレードする場合は、以下の手順に従い、Atlas Copco Data Communication (ACDC) がバージョン 2.5 以降であることを確認してください。
アップグレードを開始する前に:
ToolsTalk 2 ーバーが実行されていることを確認してください。
ToolsTalk 2 データベースをバックアップします。
.NET 8 がインストールされていることを確認します。
アップグレードが完了したら、ToolsTalk 2 クライアントのバージョン 2.25 をインストールします。
インストール - 内部
OpenJDKのインストール
OpenJDKのダウンロード
Zip ファイルをフォルダに展開します。次に例を示します: C:\プログラムファイル\Java\.OpenJDKフォルダーが作成され、binフォルダーはメインフォルダーのサブフォルダーになります。
[コントロールパネル]を選択し、[システムのプロパティ]に移動します。
[詳細設定] 、[環境変数]の順に選択します。
OpenJDKのインストール中に作成されたbinフォルダーの場所を、「システム変数」ウィンドウのPATH変数に追加します。
例:C:\WINDOWS\system32;C:\WINDOWS;"C:\ProgramFiles\Java\”OpenJDK_FOLDER”\bin"
「システム変数」ウィンドウで[新規]を選択します。
変数名をJAVA_HOMEとして入力します。
OpenJDKのインストールパスとして変数値を入力します(binサブフォルダーなし)。
[OK] を選択します。
[変更の適用]を選択します。
コマンドプロンプトを開き、「java -version」と入力して、新しくインストールされたOpenJDKが出力されるかどうかを確認します。
また、 JAVA_HOMEをOpenJDKインストールのフォルダーにポイントしてから、PATH変数を%JAVA_HOME%\ binに設定することもできます。したがって、OpenJDKを変更する必要がある場合は、 JAVA_HOME変数のみを変更して、PATHをそのままにしておくことができます。
JAVAがすでにインストールされていて、OpenJDKに変更する場合は、[プログラムの追加と削除]からJavaをアンインストールします。ライセンスサーバーを再インストールする必要があります。cmd proptでFMSフォルダーに移動し、flexnetls.bat -uninstallを実行してから、flexnetls.bat -installを実行します。
設定
このセクションでは、製品設定を作成、変更、および確認する方法の詳細について説明します。
はじめに
開始
ToolsTalk 2クライアントがインストールされている場合、アプリケーションは次の手順で開始できます。
Windows のスタートメニューを選択し、すべてのプログラムを開いて、 ToolsTalk 2までスクロールします。
フォルダを開き、ToolsTalk 2
を選択してアプリケーションを起動します。
コントローラ
コントローラタイプ
互換性があり、かつToolsTalk 2を使用して構成可能なコントローラとは別に、他のコントローラタイプとそれらに関するいくつかの限られた情報を、コントローラリストにを表示する機能があります。構成可能でないコントローラは、ToolsTalk 2 を使用して関連するソフトウェアを起動し、そこからさらに構成が可能となります。
コントローラータイプの ToolsControl はハードウェアなしの PF8 コントローラーをベースにしています。ToolsControl は、フィールドバス、SoftPLC、内部 I/O、スキャナーなどを使用することなく、Docker クラスターで動作するアプリケーションを取り揃えた仮想コントローラーです。ToolsControl により、クラウド様環境一式を個別にインストールして構成しなくても、システムをセットアップできます。ToolsControl システムには、オンデマンドで作成され、ToolsControl ポータルやその他のサービスによって管理される締め付けコントローラーが含まれています。
別のコントローラタイプは、[すべてのコントローラ]リストにアイコンで表示されます。
コントローラアイコン | コントローラタイプ | 互換性のあるソフトウェア |
|---|---|---|
| ToolsControl | ToolsTalk 2 |
| Power Focus 8 同期締め付け | ToolsTalk 2 |
| Power Focus 8 | ToolsTalk 2 |
| Power Focus XC | ToolsTalk 2 |
| Power Focus 6000 | ToolsTalk 2 |
| PF6 Flex System | ToolsTalk 2 |
| Power Focus 6000 同期締め付け | ToolsTalk 2 |
| Power Focus 4000 | ToolsTalkPF |
| Power Macs 4000 | ToolsTalkPM |
| IXB | ToolsTalk 2 |
| STR レンチ | ToolsTalk 2 |
コントローラ情報
Power Focus 4000 または Power Mac 4000 コントローラで表示できる情報の例を次に示します。サポートされていないコントローラには、この情報は表示されません。
アプリケーション起動ソフトウェアのバージョン
コントローラのシリアル番号
プロトコルバージョン
RBU シリアル番号
RBU タイプ
ソフトウェアバージョン
ツール情報
以下の情報は、ToolsTalk 2の[ツール]の下に表示されます。ここに表示される内容は、それぞれのコントローラソフトウェアで構成されています。
識別子
シリアル番号
モデルタイプ
サービス日
校正日
締め付け回数
ツールタイプ
サービス以来の締め付け回数
アプリケーションコードのバージョン
ブートコードのバージョン
ツール情報を受信するには、コントローラをACDCに接続する必要があります。詳細については、ToolsTalk 2 のドキュメントを参照してください。
本セクション内
コントローラーの追加
ToolsTalk 2に接続されているコントローラーは プラント構造
 に表示できます。
に表示できます。
ToolsTalk 2にコントローラーが接続されていない場合、またはフォルダーまたはコントローラーにアクセスするユーザー権限がない場合は、プラント構造ビューは空白です。
ToolsControl は、ToolsControl ポータルを通じて ToolsTalk 2 に追加されます。
プラント構造を選択し、コントローラーリストの上部領域の任意の場所を右クリックします。または、 システム管理を選択し、 コントローラーソフトウェアとデータ管理タブで、左側のメニューワークスペース領域を 右クリックします。新しいコントローラーの追加を選択します。コントローラーの接続ダイアログウィンドウが開きます。
IPアドレスか、またはコントローラーのDNS名を入力してください。ToolsTalk 2サーバのIPアドレスは前もって設置されます。
コントローラーがオンライン のメッセージが表示されたら、[接続] を選択し、[閉じる] を選択します。
接続状態
「コントローラーの接続」ウィンドウですでに接続されているコントローラーのIPアドレスを入力すると、「 コントローラーはすでに接続されてオンラインです」というメッセージが表示されます。
接続が確立されている間、「 コントローラーがオンラインになるのを待機中です」というメッセージが表示されます。
コントローラーへの接続が確立されると、「コントローラーがオンラインです 」というメッセージが表示されます。
メッセージ「 ToolsTalk がコントローラーに接続できませんでした。」IPアドレス/DNS名が表示されていることを確認してください」と表示されます(接続に失敗した場合)。
コントローラーは、Web GUIまたはコントローラーGUIを介してToolsTalk 2 アプリに接続できます。
この手順については、コントローラー固有のマニュアルを参照してください。
コントローラーリストの管理
プラント構造ワークスペース の既定のビューには、すべてのコントローラが表示されます。すべてのコントローラフォルダーには、オンラインかオフラインかに関わらず、現在、ToolsTalk 2 サーバーに接続されている全てのフォルダーが含まれます。カスタム セクションは、フォルダーに順序付けて入れられた全てののコントローラのサブセクションです。
カスタムセクションフォルダーの選択
コントローラリストで、オプションボタンをクリックして  カスタム セクションを選択し、続いて適切なフォルダーを選択します。
カスタム セクションを選択し、続いて適切なフォルダーを選択します。
コントローラの選択
左側のメニューバーで プラント構造
を選択します。該当するコントローラにスクロールダウンして、名前のフィールド
 をクリックして選択します。
をクリックして選択します。 選択したコントローラがハイライト表示になります。オンライン状態のコントローラは、ToolsTalk 2アプリケーションを常に更新します。
オフラインのコントローラ名には取り消し線が付いています。
オフライン状態のコントローラは、ToolsTalk 2以外の別のコントローラ・インターフェースを通して変更が行われた場合には、古く最新でない情報が表示されることがあります。
数人のToolsTalk 2ユーザーが同じコントローラにアクセスすることは可能です。コントローラを選択する試みを行うとき、そのコントローラが、誰か別のToolsTalk 2ユーザーによって既に選択されている場合、モーダルダイアログボックスが以下の警告メッセージと共に表示されます。
他のユーザーがシステム内で現在アクティブです。パラメーター値は予告なく変更することがあります。
OK を選択して、ダイアログボックスを閉じて続行します。
コントローラの検索
プラント構造 ワークスペースには、コントローラ・リストでコントローラを検索する為のフィールドがあります。
検索フィールドに、コントローラ名の2個以上の文字を入力してください。
コントローラ名またはコントローラのタイプを利用して、検索することが可能です。
リモートコントローラーの再起動
状況によっては、コントローラの完全なパワーオンリセット (POR) が必要になることがあります。
以下では、ToolsTalk 2からリモートPOR を作成する方法について説明します。
左側のメニューバーで プラント構造
を選択します。選択したコントローラを右クリックし、ショートカットメニューで再起動を選択します。
モーダルウィンドウダイアログでコントローラの再起動操作を確認またはキャンセルします。コントローラはまずオフラインになってから、オンラインに戻ります。
この操作には数分かかります。
これが進捗している間に、ToolsTalk 2のその他のタスクを実行することが可能です。
コントローラを遠隔で再起動できるのは、コントローラがオンラインで、かつToolsTalk 2アプリ・サーバーに接続されている場合だけです。オフラインのコントローラ名には取り消し線が付いています。
パラメータと構成の変更を保存する
コントローラのステータスが[オンライン]になっている場合、Web GUIまたはコントローラGUIで何らかの変更が行われた際、自動的にToolsTalk 2が更新されます。
ToolsTalk 2 で行われた変更は自動的に保存されますが、コントローラにはコピーされません。プッシュは変更をコントローラにコピーし、アクティブなコマンドによって実行されます。
プラント構造ワークスペースのコントローラ名の横にプッシュインジケータ が表示され、ToolsTalk 2で構成変更が行われたものの、まだコントローラにコピーされていないことを示します。
が表示され、ToolsTalk 2で構成変更が行われたものの、まだコントローラにコピーされていないことを示します。
プッシュは複数の方法で行うことができます。
コントローラリストのコントローラ名の横にあるプッシュ配信インジケーターアイコン
を選択します。システムメニューバーのプッシュコマンドボタン
 をクリックして、 ToolsTalk 2から 1 つまたは複数のコントローラへの変更のコピーを開始します。ショートカットメニューが開き、対象のコントローラを選択できます
をクリックして、 ToolsTalk 2から 1 つまたは複数のコントローラへの変更のコピーを開始します。ショートカットメニューが開き、対象のコントローラを選択できますプラント構造
ワークスペースのコントローラ名を右クリックして、ショートカットメニューの[プッシュ]コマンドボタンを選択します。変更はToolsTalk 2から1つの選択されたコントローラにコピーされます。
オフラインのステータスのコントローラにプッシュを行うことはできません。
ワークスペース ウィンドウの管理
プラント構造とレポートの両方のワークスペースでは、さらに作業するための単一のコントローラの選択を行います。ワークスペースを最小化または最大化して、次の図に示すようにドラッグするか、プラント構造アイコンを選択することにより、コントローラーワークスペースのスペースを増やすことができます。
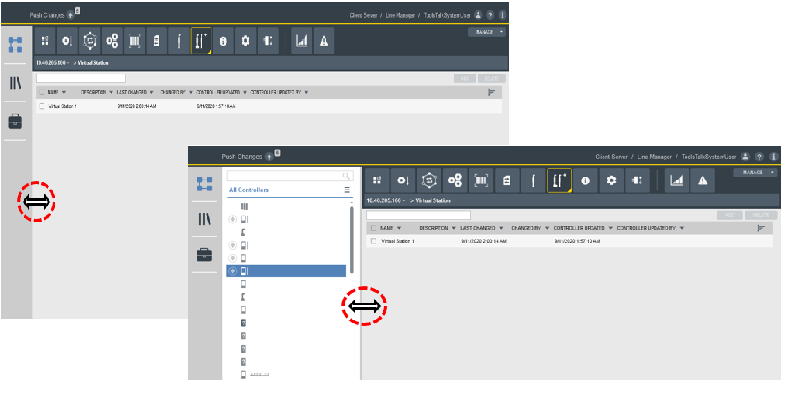
ワークスペースビューの最小化と最大化
2 つのワークスペースエリアの間の線上にカーソルを置きます。カーソルの形が白の矢印から横向きの両方向矢印に変わります。
クリックしたままドラッグすると、2 つのワークスペース領域間の境界線を移動できます。ワークスペースは、ウィンドウの境界線を左側のメニューまで移動して最大化するか、ウィンドウの境界線を右側のメニューに移動して最大化することができます。
データ グリッドのフィルター処理と並べ替え
ワークスペース ウィンドウのデータ グリッド列は、並べ替えとフィルター処理を行うことができます。
並べ替えとフィルター機能にアクセスするには、列ヘッダーを選択します。
リストを並べ替えるには、[リストの並べ替え] を選択して、リストを昇順、降順、または既定の順序に並べ替えます。
リストをフィルタするには、表示する内容をフィルタするチェックボックスをオンにします。既定のビューに戻るには、[フィルタをクリア] を選択します。
検索機能
プラント構造のタブ、ライブラリおよびシステム管理 タブで特定のコンテンツを検索することができます。この機能は、 システム管理
タブの [スケジュールされたタスク] タブと [ユーザーグループ] タブでは使用できません。
タブで特定のコンテンツを検索することができます。この機能は、 システム管理
タブの [スケジュールされたタスク] タブと [ユーザーグループ] タブでは使用できません。
データグリッドが表示されている特定のタブのメインワークスペースに移動します。
ワークスペースの左上コーナーにある検索バーに、検索するパラメーターを入力します。
選択したパラメータに基づいて、リストが絞り込まれます。たとえば、パラメータ「イベント」を入力すると、「イベント」という単語を含む行のみが表示されます。
マルチソート機能
データグリッドの列を昇順または降順で並べ替えることができます(たとえば、インデックス、アルファベット順、日時など)。また、1番目、2番目など、並べ替えで優先される列の順番を割り当てることができます。
データグリッドが表示されている特定のタブのメインワークスペースに移動します。
データグリッドワークスペースのヘッダー行の最後にある
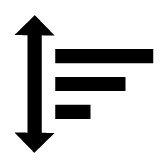 を選択します。
を選択します。最初に並べ替える列名のチェックボックスを選択してから、方向矢印を選択して、昇順か降順かを指定します。上向きの矢印は昇順を示し、下向きの矢印は降順を示します。
たとえば、[最終変更] を最初に選択すると、その隣に優先度番号 1 が表示され、上向きの矢印を選択した場合は、[最終変更] 列で、一番上の行に最新の日時のデータが表示されます。他の列は、この選択に基づいて表示順序が変更されます。別の列が次に並べ替えされるように選択されている場合、その列の優先度番号は2として表示され、優先度は2の列のデータは、優先度1の列内のデータが並べ替えされた後、方向矢印に基づいて並べ替えられます。 その後さらに選択した列に対して同様に続きます。
列の優先度を削除または変更するには、チェックボックスの選択を解除するか、もう一度選択します。
ユーザーインターフェイス - コントローラ付きワークスペースの概要
コントローラを選択してコントローラメニューアイコンを選択すると、コントローラワークスペースに次の情報が表示されます。
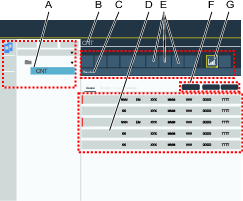
A | プラント構造ワークスペースで選択したコントローラ。 |
B | コントローラワークスペース内のコントローラ名。名前は、プラント構造で選択されたコントローラ名と同じです。 |
C | 選択したコントローラメニュー アイコンの名前 |
D | コントローラワークスペースの概要情報を含む構成のリスト |
E | コントローラメニューアイコン |
F | コントローラワークスペース内のコマンドボタンの行。コマンドボタンの種類は、選択したコントローラのメニューアイコンによって異なります。 |
G | 選択されたコントローラメニューのアイコン。黄色の枠線で強調表示 |
ワークスペースの概要には、構成のリストが表示されるか、メニューにパラメーター値が表示されます。構成のリストが表示されている場合、構成名をダブルクリックすると次のレベル、メニューレベルにアクセスできます。
概要では、構成に警告またはエラーがある場合、警告アイコン またはエラーアイコン
またはエラーアイコン が表示されます。警告とエラーの両方がある場合は、エラーアイコンのみが表示されます。
が表示されます。警告とエラーの両方がある場合は、エラーアイコンのみが表示されます。
PF6000 および PF8 の構成
高品質総合締め付けアクセサリー(QIF)
QIF (高品質総合締め付け) とはコントローラとオペレータとの間の通信で使用される一連のアクセサリのことです。QIF アクセサリの設定は、構成セクション で確認できます。
で確認できます。
[締め付けプログラム]タブの使用
締め付けプログラムのリスト表示
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
 を選択します。
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
リストには次の列があります。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスにマークを付けて締め付けプログラムを選択します。 |
名称 | 締め付けプログラムの名前。プッシュインジケーター |
戦略 | 締め付けプログラムに選択されている締め付け戦略。 |
説明 | 各締め付けプログラムの[プロパティ]フィールドで説明されている締め付けプログラムの説明。 |
ライブラリのリンク | プログラムが、締め付けプログラムライブラリのグローバル締め付けプログラムにリンクされているかどうかを示します。 |
目標 | 最終締め付け目標は、トルク値または角度値で表されます。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | どのユーザーが最後に変更を加えたかを示します。 |
コントローラ更新 | コントローラにプッシュされた最終変更をコントローラ時間で表します。 |
コントローラ更新者 | どのユーザーが最後にコントローラーをプッシュしたかを示します。 |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
変更者のフィールドは、ToolsTalk 2 GUI を介して登録されている ToolsTalk 2 ユーザーになります。
コントローラ更新者のフィールドは、Web GUI またはコントローラ GUI を介して登録される ToolsTalk 2 ユーザーになります。
次の列は、検索ボックスのテキストでフィルタリングできます。名前、戦略、説明、ターゲット、および変更者。
コマンド | 説明 |
|---|---|
追加 | 新しい締め付けプログラムを作成します。 |
管理 |
|
本セクション内
締め付け戦略
締め付け戦略を選択すると、ジョイントへのクランプ力(またはプレロード)をかける方法が選択できます。異なるジョイントでは、必要なクランプ力をかけ、不要なサービス中の影響を最小限に抑える方法について異なる戦略が必要です。
締め付け戦略には、目標トルク値または目標角度値の目標と、戦略とツールによって異なるオプションが必要です。その他のすべてのパラメータは締め付けを最適にするために構成できます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
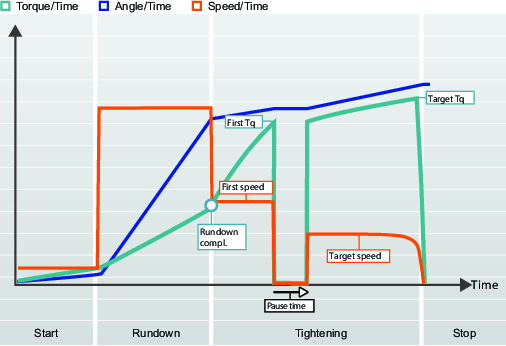
戦略 | 使用可能な締め付け戦略 TurboTight: 追加の締め付け挙動はデフォルトとして使用されません。ターゲット値のみ使用されます。 クイックステップ: 最初の締め付け段階を追加して、プリロード散乱を低減します。 2 ステップ: さらに短期的な緩和効果に対処するために、最初と最終の締め付けステップ間にポーズを追加します。 3 ステップ: 定義した第 1 トルク値まで締め付け、次にネジを緩めてすぐに目標トルクまで再度締め付けます。 回転: 指定した速度と角度でスピンドルを回転します。 レンチ - 生産: ST レンチツールのみに使用される締め付け戦略。 レンチ - 品質: ST レンチツールのみに使用される締め付け戦略。 テンソルパルス: パルス機能のあるツールで使用される締め付け戦略。パルスツールではより高い目標トルクに達することができます。オプションは目標トルクのみです。 インパルス - 単一ステップ: パルス機能のあるツールで使用される締め付け戦略。パルスツールではより高い目標トルクに達することができます。オプションは目標トルクのみです。 | TurboTight |
ターゲットの種類 | 最終ステップのターゲット値の種類を定義します。 ターゲットトルク:最終ステップを実行するときの締め付けは、指定されたターゲット値を目指します。 ターゲット角度:最終ステップを実行するときの締め付けは、指定されたターゲット値を目指します。 |
|
目標トルク | 最終ステップの締め付けの目標トルクを定義します。 |
|
目標角度 | 締め付けまたは最終ステップのターゲット角度を定義します。 |
|
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
関連情報
TurboTight
TurboTight はデフォルト締め付け戦略であり、ツールの最高速度 (ツール最高速度) に基づいて非常に高速かつ人間工学的な締め付けを実施するよう設計されています。この戦略では、締め付けを実施するために、目標トルクのみ設定が必要です。ジョイントの特性に応じて、例えば、ジョイントが非常に硬いか非常に柔らかい場合、異なる締め付け戦略が必要になることがあります。
TurboTight 戦略で不要な結果が得られた場合は、ランダウン完了がどのように設定されているか確認することを推奨します。ランダウン完了の設定が高すぎると、TurboTight 戦略での締め付けのステップで必要な計算作業を行う時間が短くなりすぎ、オーバーシュートが発生します。目的は、ランダウン完了を可能な限りスナグの近くになるよう設定することです。
ランダウン速度の設定が高すぎると、TurboTight で締め付けのステップで必要な計算作業を行う時間が十分でないため、オーバーシュートを引き起こします。これは、ジョイントが非常に硬い場合にさらに重要です。
次の表に、Turbotight 締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
目標トルク |
| 締め付けまたは最終ステップの目標トルクを定義します。 |
|
残留トルクの相関係数 | ツールで測定された動的トルクと、正しいクランプ力に必要な残留トルク間で補正する調整係数。 これはパーセンテージで表されます。 | 100 % | |
トルク限度 |
| ラジオボタンで選択されます。 最大と最小のトルク値は、自動または手動で選択できます。 |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値。 | ターゲットトルクの 95% |
最大トルク | トルク制限 = 手動 | 上限のトルク値。 | ターゲットトルクの 120% |
角度限界 |
| 角度限界はショートカットメニューから選択します。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルクに達した時から設定します。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 |
|
最後の角度監視トルク | 角度限界 = トルクから | 角度限界が監視される時点からのトルク値。 |
|
最小角度 | 角度限界 = オン | 角度値下限 | 90° |
最大角度 | 角度限界 = オン | 角度値上限 | 720° |
最短時間 | 角度限界 = オン | ステップの最短時間 0~9999 ミリ秒の範囲 | 0 |
最長時間 | 角度限界 = オン | ステップの最長時間 1~9999 ミリ秒の範囲 | 40 ms |
トルク測定点 |
| ショートカットメニューから選択: 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| ショートカットメニューから選択: オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
角度を測定対象 | 角度限界 = オン | ショートカットメニューから選択: ピークトルク時の値: 締め付け時に最大トルクで角度値を測定します。 最大角度値: 締め付け時の最大角度値を測定します。 シャットオフ: 停止段階を開始する前に角度値を測定します。 | |
早期のトルク喪失検出時間 | ランダウン完了から、プログラムはトルクを増加させて締め付けを開始できます。この時間範囲内にツールがトルクの低下を検出するとスリップオフが報告されます。 ソケットがネジヘッドから滑り、測定したトルクが指定時間範囲内のランダウン完了を下回ると、締め付けが中止され、早期のトルク喪失が報告されます。 | 200 ms |
ツールアイコン  にあるツールの制限メニューでは、ツールの最大限度に関する情報を示します。ツールのタイプと限度は、緩め戦略と、締め付けプログラムに関連付けられているパラメータにも影響します。
にあるツールの制限メニューでは、ツールの最大限度に関する情報を示します。ツールのタイプと限度は、緩め戦略と、締め付けプログラムに関連付けられているパラメータにも影響します。
例えば、SR31 ツールのパルスで TurboTight 戦略を使用すると、通常のツールより大幅に高いトルク値に達成できます。TurboLoosening は、ネジを緩めるために正しく構成する必要があります。
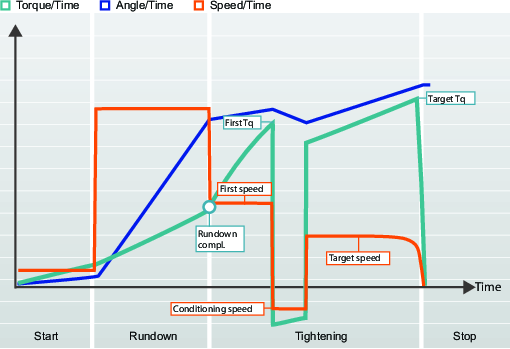
クイックステップ
クイックステップは、所定のトルクと速度で最初のステップを追加し、次に最終ステップのターゲット速度を低下させることでジョイントのプレロード散乱を低減させるために使用する締め付け戦略です。
次の表に、クイックステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終ターゲットとしてのトルク値のパラメータ
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます。 |
|
最初のトルク | ターゲット = トルク |
|
|
最初の速度 |
| 最初の速度は、自動的にまたは手動で選択できます。 |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ターゲット速度は、自動的にまたは手動で選択できます。 |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
目標トルク |
| 締め付けまたは最終ステップの目標トルクを定義します。 |
|
トルク限度 |
| 最大と最小のトルク値は、自動または手動で選択できます。 |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値。 | ターゲットトルクの 95% |
最大トルク | トルク制限 = 手動 | 上限のトルク値。 | ターゲットトルクの 120% |
角度限界 |
| 角度限界はショートカットメニューから選択します。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルク値に達した時点から設定します。 最初のトルクから: 監視ウィンドウは、最初のトルク値に達した時点から設定します。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 |
|
最後の角度監視トルク | 角度限界 = トルクから | 角度限界が監視される時点からのトルク値。 |
|
最小角度 | 角度限界 = オン | 角度値下限。 | 324° |
最大角度 | 角度限界 = オン | 角度値上限。 | 396° |
最短時間 | 角度限界 = オン | 段階の最短時間。 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = オン | 段階の最長時間。 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
角度を測定対象 | 角度限界 = オン | ピークトルク時の値: 締め付け時に最大トルクで角度値を測定します。 最大角度値: 締め付け時の最大角度値を測定します。 シャットオフ: 停止段階を開始する前に角度値を測定します。
| |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
次の表に、クイックステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終目標としての角度値のパラメータ
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます。 |
|
最初のトルク | 目標 = 角度 |
|
|
最初の速度 |
| 最初の速度は、自動的にまたは手動で選択できます。 |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ターゲット速度は、自動的にまたは手動で選択できます。 |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
最小トルク | 下限のトルク値。 | ターゲットトルクの 95% | |
最大トルク | 上限のトルク値。 | ターゲットトルクの 120% | |
ターゲット角度 |
| 最終ステップのターゲット値。 |
|
角度限界 |
| 自動:アルゴリズムによって自動的に設定されます。 手動:限度を手動で設定します。 |
|
最小角度 | 角度限界 = 手動 | 角度値下限 | 324° |
最大角度 | 角度限界 = 手動 | 角度値上限 | 396° |
最短時間 | 角度限界 = 手動 | 段階の最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = 手動 | 段階の最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。 | 45° |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
2 ステップ
2 ステップ戦略は、ジョイントの短期的緩和効果にさらに対処するよう最初のステップと最後のステップの間に小さな遅延時間を追加したこと以外で、クイックステップの戦略と非常に似ています。
最初のターゲットに達すると、ツールは、最終ステップを続行する前に指定された時間の間即時停止します。最初のトルク値と一時停止時間は、手持ちツールの人間工学を改善するよう選択してください。
次の表に、2 ステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終ターゲットとしてのトルク値のパラメータ。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます |
|
最初のトルク | ターゲット = トルク |
|
|
最初の速度 |
| ラジオボタンで選択されます。 最初の速度は、自動的にまたは手動で選択できます |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ラジオボタンで選択されます。 ターゲット速度は、自動的にまたは手動で選択できます |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
一時停止時間 | 戦略 = 2 ステップ | 最初のステップと最終ステップの間の時間 | 50 ms |
目標トルク |
| 締め付けまたは最終ステップの目標トルクを定義します |
|
トルク限度 |
| ラジオボタンで選択されます。 最大と最小のトルク値は、自動または手動で選択できます |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値 | ターゲットトルクの 95% |
最大トルク | トルク制限 = 手動 | 上限のトルク値 | ターゲットトルクの 120% |
角度限界 |
| 角度限界は、ショートカットメニューから有効にできます。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルクに達した時から設定します。 最初のトルクから: 監視ウィンドウは、最初のトルクに達した時点から設定されます。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 |
|
最後の角度監視トルク | 角度限界 = トルクから | 角度制限が監視される時点からのトルク値 |
|
最小角度 | 角度限界 = オン | 角度値下限 | 324° |
最大角度 | 角度限界 = オン | 角度値上限 | 396° |
最短時間 | 角度限界 = オン | 段階の最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = オン | 段階の最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| ショートカットメニューから選択: 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| ショートカットメニューから選択: オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
角度を測定対象 | 角度限界 = オン | ショートカットメニューから選択: ピークトルク時の値: 締め付け時に最大トルクで角度値を測定します。 最大角度値: 締め付け時の最大角度値を測定します。 シャットオフ: 停止段階を開始する前に角度値を測定します。
| |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | ショートカットメニューから選択: オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限。 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
次の表に、2 ステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終目標としての角度値のパラメータ。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます |
|
最初のトルク | 目標 = 角度 |
|
|
最初の速度 |
| ラジオボタンで選択されます。 最初の速度は、自動的にまたは手動で選択できます |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ラジオボタンで選択されます。 ターゲット速度は、自動的にまたは手動で選択できます |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
一時停止時間 | 戦略 = 2 ステップ | 最初のステップと最終ステップの間の時間 | 50 ms |
最小トルク | 下限のトルク値 | ターゲットトルクの 95% | |
最大トルク | 上限のトルク値 | ターゲットトルクの 120% | |
ターゲット角度 |
| 最終ステップの目標値 |
|
角度限界 |
| 角度限界は、ショートカットメニューから有効にできます。 自動:アルゴリズムによって自動的に設定されます。 手動:限度を手動で設定します。 |
|
最小角度 | 角度限界 = 手動 | 角度値下限 | 324° |
最大角度 | 角度限界 = 手動 | 角度値上限 | 396° |
最短時間 | 角度限界 = 手動 | 段階の最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = 手動 | 段階の最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| ショートカットメニューから選択: 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| ショートカットメニューから選択: オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | ショートカットメニューから選択: オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限。 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
3 ステップ
3 ステップ戦略では、最初のステップと最終ステップの間に緩めステップを追加して、根入れによる短期的な緩和効果に対処し、プレロード散乱を減少させます。これは、ジョイントの調整と呼ばれることがあります。これは、例えば、多くの隣接面のあるジョイントで有用であり、根入れが少なくなる表面の平滑化のために再利用したパーツよりも新しいパーツに大きな影響を与えることになります。
ジョイントの調整は、最初のステップで所定トルクの最初のトルクまで締め付け、次に、ナットを指定調整角だけ回転させて荷重を解放し、ナットをその目標トルクまで再度締め付けて行います。
次の表に、3 ステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
次の表は最終目標 = トルクの場合のものです。
最初のターゲットに達し、調整ステップを入ると、ツールが即時停止し、最終ステップを続行する前に反転します。この調整ステップは、場合により手持ちツールの人間工学を改善するよう微調整する必要があります。
最終ターゲットとしてのトルク値のパラメータ。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます |
|
最初のトルク | ターゲット = トルク |
|
|
最初の速度 |
| ラジオボタンで選択されます。 最初の速度は、自動的にまたは手動で選択できます |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
調整角度 | 戦略 = 3 ステップ | 調整ステップ時のソケットの逆回転角 | 180° |
調整速度 | 戦略 = 3 ステップ | 調整ステップ時の逆回転のターゲット速度 | 345 rpm |
ターゲット速度 |
| ラジオボタンで選択されます。 ターゲット速度は、自動的にまたは手動で選択できます |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
目標トルク |
| 締め付けまたは最終ステップの目標トルクを定義します |
|
トルク限度 |
| ラジオボタンで選択されます。 最大と最小のトルク値は、自動または手動で選択できます |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値 | ターゲットトルクの 95% |
最大トルク | トルク制限 = 手動 | 上限のトルク値 | ターゲットトルクの 120% |
角度限界 |
| 角度限界は、ショートカットメニューから有効にできます。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルクに達した時から設定します。 最初のトルクから: 監視ウィンドウは、最初のトルクに達した時点から設定されます。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 |
|
最後の角度監視トルク | 角度限界 = トルクから | 角度制限が監視される時点からのトルク値 |
|
最小角度 | 角度限界 = オン | 角度値下限 | 324° |
最大角度 | 角度限界 = オン | 角度値上限 | 396° |
最短時間 | 角度限界 = オン | ステップの最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = オン | ステップの最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| ショートカットメニューから選択: 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止ステップを開始する前にトルク値を測定します。 |
|
トルク補正 |
| ショートカットメニューから選択: オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
角度を測定対象 | 角度限界 = オン または最終目標 = 角度 | ショートカットメニューから選択: ピークトルク時の値: 締め付け時に最大トルクで角度値を測定します。 最大角度値: 締め付け時の最大角度値を測定します。 シャットオフ: 停止ステップを開始する前に角度値を測定します。
| |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | ショートカットメニューから選択: オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限。 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
次の表に、3 ステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終ターゲットとしてのトルク値のパラメータ。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます |
|
最初のトルク | 目標 = 角度 |
|
|
最初の速度 |
| ラジオボタンで選択されます。 最初の速度は、自動的にまたは手動で選択できます |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
調整角度 | 戦略 = 3 ステップ | 調整ステップ時のソケットの逆回転角 | 180° |
調整速度 | 戦略 = 3 ステップ | 調整ステップ時の逆回転のターゲット速度 | 345 rpm |
ターゲット速度 |
| ラジオボタンで選択されます。 ターゲット速度は、自動的にまたは手動で選択できます |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
最小トルク | 下限のトルク値 | ターゲットトルクの 95% | |
最大トルク | 上限のトルク値 | ターゲットトルクの 120% | |
ターゲット角度 |
| 最終ステップの目標値 |
|
角度限界 |
| 角度限界は、ショートカットメニューから有効にできます。 自動:アルゴリズムによって自動的に設定されます。 手動:限度を手動で設定します。 |
|
最小角度 | 角度限界 = 手動 | 角度値下限 | 324° |
最大角度 | 角度限界 = 手動 | 角度値上限 | 396° |
最短時間 | 角度限界 = 手動 | ステップの最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = 手動 | ステップの最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| ショートカットメニューから選択: 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止ステップを開始する前にトルク値を測定します。 |
|
トルク補正 |
| ショートカットメニューから選択: オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | ショートカットメニューから選択: オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限。 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
外部結果
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。この外部信号は、(例えば、I/O バスを介して) Power Focus 6000 にデジタル信号を供給できる任意の手段を介して供給できます。
信号が送信されると、結果ビューは、締め付けプログラム(指定されたトルク値、角度値、またはテキスト文字列)で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
プラント構造ワークスペース
でコントローラを選択します。 締め付け
に移動します。締め付けワークスペースに、締め付けプログラムのリストが表示されます。
締め付けプログラムの名前をダブルクリックして締め付けプログラムを外部結果戦略として構成するか、追加コマンドボタンを選択して新しい外部結果戦略を作成します。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
トルク <目標トルク> | 希望する表示された目標トルク値の数値。例えば、クリック式レンチからの信号は <目標トルク> と表示されます。 | 0.00 |
角度 <目標角度> | 希望する表示された目標角度値の数値。例えば、クリック式レンチからの信号は <目標角度> と表示されます。 | 360° |
テキスト | 希望する表示されたテキストの英数字文字列。例:「オイルが交換されました」。 |
|
外部結果が記録され、有効な結果ビューと履歴結果に表示されます。
[外部 OK] を使用するには、仮想ステーションは締め付けプログラム [外部結果] 戦略を割り当てタスクとして使用する必要があります。このためには、仮想ステーションにツールを割り当てる必要があります。ツールは、物理ツールまたは仮想外部ツールのいずれかが可能です。
本セクション内
外部ツールからの結果
コントローラに接続されていない外部ツールまたはアプリケーションから結果を報告することが可能です。この機能は、締め付け戦略の外部結果を使用する論理ツールまたは仮想ツールとして定義可能な外部ツールを定義して、実際のツールの代わりに仮想ステーションに割り当る可能性を提供します。
外部ツールのセットアップ
プラント構造ウィンドウ
でコントローラを選択します。設定
 に移動します。
に移動します。ワークスペースエリアに設定メニューが表示されます。
[外部ツール] メニューの [追加] を選択し、[有効] を [オン] に設定します。
[有効]を[オフ]に設定すると、外部ツールを削除せずに切断し、必要に応じて有効にできます。
コントローラ当たり最大10個の外部ツール構成を作成できます。
外部ツールのモデル、シリアル番号、説明を入力します。
シリアル番号は必須パラメーターであり、許可される最大文字数は32文字です。
外部ツールを削除するには、[外部ツール構成]のチェックボックスをオンにし、[削除]を選択します。
変更をプッシュ
すると 、外部ツールが ツール
タブとコントローラに表示されます。
関連情報
ツールを接続せずに外部結果を構成する
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
 を選択します。
を選択します。ツールメニューで外部ツールを選択します。
外部結果戦略を持つタスクを仮想ステーションの [タスク] メニューに割り当てて、変更をプッシュ
します。
パルスツール戦略
コントローラーソフトウェアのバージョンが締め付けプログラムをサポートする場合、戦略を選択することができます。パルス化ツールは、通常の回転ツールに比べて高いトルクを得ることができます。
パルス締め付けプログラム
開始
開始ステップの間に、ツールは、パルスなしの高速モードで回転します。
パラメーター名 | 説明 |
|---|---|
ソフトスタート | ボルトがネジに入るのを容易にするために、ツールの速度、角度、最大トルクの設定ができます。 ラジオボタンで選択されます。 オフ: ソフトスタートがオフになります。 オン: ソフトスタートがオンになります。 |
Speed (速度) | ソフトスタート時の速度を定義します。 |
Time (時間) | ソフトスタート期間を定義します。 |
角度 | ボルトがネジに入るようスピンドルの回転ターゲット角度を定義します。 |
最大トルク | ソフトスタート時にかかるトルク上限値を定義します。トルク最大を超過すれば、締め付けは NOK と見なされます。 |
リヒット検出 | 早期:既に締め付けたねじ / ボルトが検出されると直ちに締め付けを終了します。締め付けは NOK とみなされます。ソフトスタートが有効になっていることが必要です。 完了:すでに締め付けたネジ / ボルトが検出されても、すべての締め付けステップが実行されるまで締め付けは終了しません。締め付けは NOK とみなされます。ソフトスタートがアクティブでない場合にリヒット検出を行うには、リヒット検出完了オプションを選択する必要があります。リヒット検出完了では、すべての締め付けステップが実行されるまで締め付けを終了しません。速度がランダウン速度の半分に達しなかった場合、その締め付けはリヒットと見なされ、リヒットエラーが表示されます。 オフ: リヒット検出は実施されません。 コンビネーションソフトスタート = オフとリヒット = 早期は許可されません。 |
正 | TrueAngle 補正は、ツールの回転を検出し、設定された制限内で角度補正を行うことができます。 |
負 | TrueAngle 補正は、ツールの回転を検出し、設定された制限内で角度補正を行うことができます。 |
アタッチメント調整を使用 | アタッチメントは、ラジオボタンで選択されます。 |
変速比 | ソケット回転速度 = ツール速度/ギア比。 |
効率の調整 | 例えば、0.9 は 10% の効率の損失を意味します。 |
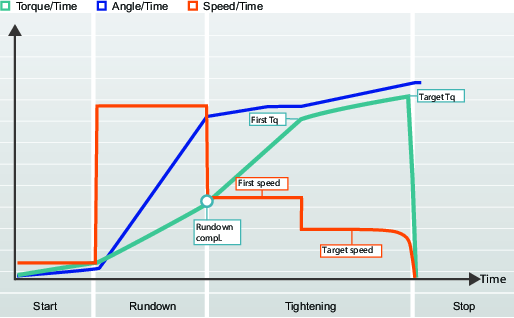
ランダウン
ランダウンの間に、ツールは、一定のモーター速度となる高速モードかパルスモードのいずれかを使用することができます。選択は、遭遇したトルクと、設定で指定されたトルク制限に応じて行われます。
パラメーター名 | 説明 |
|---|---|
高速ランダウン | ランダウンステップは、オーバーシュートすることなく時間を最短にするために高速で行うことができます。これは、指定された角度長さに対して高速でツールを作動させることで行うことができます。この角度に達すると、速度は、ランダウン速度パラメーターに指定されている低速に変更されます。SRB ツールでのみ使用できます。 長さ:既定値 3600°、最大値 99999° Speed (速度):ツール最大速度は、ランダウン速度(rpm)よりも高くなければなりません。 |
ランダウン速度 | ランダウン速度は最大か手動のいずれかに設定できます。 ランダウン速度が手動に設定されている場合、ツール速度を rpm で入力します。 |
ランダウン角度範囲 | オフ: ランダウン角度制限はオフになっています。 トリガーから:ランダウン角度限界はオンになります。システムは、ツールトリガが押され、角度範囲に違反していると報告があると同時に、システムが締め付け角の監視を始めます。 トルクから:ランダウン角度限界はオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 |
ランダウン角度監視トルク | ランダウン角度制限が設定されている場所からのトルク値。 |
最小角度 | 開始点からの低角度範囲の角度値 |
最大角度 | 開始点からの高角度範囲の角度値 |
最短時間 | ステップの最短時間。 |
最長時間 | ステップの最長時間。 |
ランダウンパルス制限 | ショートカットメニューから選択: オフ: ランダウンパルス制限はオフになっています。 トリガーから:ランダウンパルス制限はオンになっています。システムは、ツールトリガーが押され、パルス制限に違反していると報告があると同時にパルスの監視を始めます。 トルクから:ランダウンパルス制限はオンになっています。システムは、指定のトルク値からのパルスの監視を始め、パルス制限に違反していることを報告します。 |
ランダウンパルス監視トルク | ランダウンパルス制限監視が開始する場所からのトルク値。値は、連続最大トルクより大きな値に設定する必要があります。 |
パルス最小 | ランダウン完了トルク値に到達するまでのパルスの最小数。 |
パルス最大 | ランダウン完了トルク値に到達するまでのパルスの最大数。 |
ランダウン完了トルク < 0 | スナグに達してランダウンが完了した際のトルク値を定義します。プログラムは、締め付けを進め、ランダウン時にすでに完了していなければパルスモードで起動します。 |
締め付け
パラメーター名 | 説明 |
|---|---|
ターゲットトルク | 締め付けののための最終ターゲットトルク。 |
パルスエネルギー | パルスエネルギー ツールが各パルスで送達できる最大エネルギーのパーセントとして表示したアクションパルスで送られたもの。 |
反力調整係数 | ツールによって送られるエネルギーをパーセント値で表したもの。反力調整係数は、アクションエネルギーに基づいており、快適な反応をもたらします。 |
残留トルクの相関係数 | [残留] トルクの相関係数の用語は、較正と同様であり、電気ツールで測定する動的トルクと制御ツールで測定する残留トルク間で調整します。 |
トルク限度 | 制限は、自動的にまたは手動で選択できます |
最小トルク | ステップの最小トルク。 |
最大トルク | ステップの最大トルク。 |
角度限界 | オフ: 角度制限はオフになっています。 ランダウン完了から:角度制限はオンになっています。システムは、ランダウン完了に達し、角度制限の違反報告と同時に、締め付け角度の監視を始めます。 トルクから:ランダウン角度制限がオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 |
ランダウン角度監視トルク | ランダウン角度制限監視が開始する場所からのトルク値。 |
最小角度 | 開始点からの低角度範囲の角度値。 |
最大角度 | 開始点からの角度上限の角度値。 |
最短時間 | ステップの最短時間。 |
最長時間 | ステップの最長時間。 |
パルス制限 | オフ: パルス制限監視なし。 完了ランダウンから:監視は、ランダウン完了トルクに達した時点で開始します。 トルクから:指定トルク値に達すると監視が開始します。 |
最後のパルス監視トルク | パルス制限が監視される時点からのトルク値 |
パルス最小 | 最終ターゲットに達するためのパルスの最小数。 |
パルス最大 | 最終ターゲットに達するためのパルスの最大数。 |
早期のトルク喪失検出時間 | トルクの一定の増加はランダウンから締め付けに移動するときが想定されます。ソケットが抜けたり、ネジ頭が壊れると、トルクが低下する可能性があります。これは、監視ウィンドウで検出されることがあります。 |
直接駆動式電動ツールによるパルス締め付け
以下の原理は、直接駆動電動ツールに適用されます。アトラスコプコの SRB ツールシリーズに適用可能です。
パルス締め付けでは、モーターにおける電流をパルス化する技術を使用し、以下の二つの異なる機能を備えています。
締め付け方向に正のトルクを付加するアクション電流。
逆トルクを付加することで快適な反応を作り出す反応電流。
A | 締め付け緑をかけるアクションパルス |
B | 快適さのための反応パルス |
図は、電流パルス締め付け戦略の一般的な原理を示します。詳細な曲線は、ツールタイプと締め付けアルゴリズムによりって異なります。
アクション電流と反応電流とともに図に示すように、パルス周期は、2 つのフェーズで構成されます。最終ターゲットに達するまで、各アクションパルスはトルクを締め付けに追加します。各反応パルスは、快適な反応を提供する反力を作り出します。
アクションフェーズと反応フェーズのエネルギーレベルは、設定可能なパラメーターです。これら 2 つのパラメーターの組み合わせにより、オペレーターの快適さをもたらす効率的な締め付けを作り出します。
TensorPulse プログラムを使用した締め付け
以下の原理は、直接駆動電動ツールに適用されます。アトラスコプコの SRB ツールシリーズに適用可能です。
各パルス期間の後に、ネジで得られるトルクが増加します。一連のパルス後、最終的なトルクターゲットに達します。
A | パルス N の最大の正エネルギー |
B | パルス N+1 の最大の正エネルギー |
C | エネルギーの増加(トルク) |
アクションフェーズと反応フェーズのエネルギーレベルは、ユーザーが設定可能なパラメーターです。これら 2 つのパラメーターの組み合わせにより、オペレーターの快適さをもたらす効率的な締め付けを作り出します。各期間で送ることのできる最大エネルギーのパーセントとして、2 つの段階でエネルギー量を設定することができます。
パルスエネルギー:パルス期間中にかけることのできる最大エネルギーのパーセンテージとして、各正パルスにかかるエネルギーの量。この値は、10~100% の間になります。
反力保持率:パルス期間中にかけることのできる最大エネルギーのパーセンテージとして、各反力パルスにかかるエネルギーの量。この値は、0~75% の間になります。
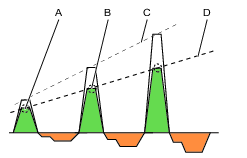
A | パルス N の低下した正エネルギー |
B | パルス N+1 の低下した正エネルギー |
C | 最大パルスエネルギーを使用したトルクのビルドアップに対して得られる曲線。 |
D | 低下したパルスエネルギーを使用したトルクのビルドアップに対して得られる曲線。 |
小さなパルスエネルギー(低下したエネルギー)では、トルクが小さなステップで増加するため、ターゲットトルクに達するために、より多くのパルスが必要です。小さなステップでは、ターゲットに達したときの締め付け終了で、より良い精度が得られます。小さなパルスでは、ツールの動きが小さくなり、オペレーターの快適性が向上します。
正しく調整した反力保持率により、必要なオペレーターの快適さが得られます。この率が高すぎると、オペレーターは、ツールの時計回りの回転を感じます。この率が低すぎると、オペレーターは、ツールの反時計回りの回転を感じます。
理想的な構成では、反力エネルギーにより緩み力を生じません。ターゲット値に達するためのパルスの量が増加する場合、この値の設定が高すぎ、小さな緩みが各パルスで起こります。
パルスエネルギーと反力保持率の最適な値を調整して、ツールの最適なパフォーマンスと最高のオペレーターの快適さを得る必要があります。
トリガー喪失
プログラム締め付け段階の[ステップ構成]ウィンドウの、[トリガー喪失時にNG] スイッチは、目標条件に達する前にツールトリガーを解放できるかどうかを制御します。設定はオンまたはオフに設定することができます。以下に 2 つの状態の説明を示します。
スイッチ設定 | 説明 |
|---|---|
オン | ターゲット条件に達する前にトリガーを解放すると、NOK 締め付けになります。 |
オフ | ターゲット条件に達する前にトリガーを解放すると、他の全ての条件が満たされている限り、OK 締め付けになります。 |
デフォルトの動作は、早期のトリガー解放が認められないというものです。
可用性
トリガー喪失でのNGは、以下の締め付け戦略で利用できます:回転、クイックステップ、2ステップ、3ステップ、インパルス - シングルステップ。
締め付け戦略の回転、クイックステップ、2ステップ、3ステップの場合、[トリガー喪失]設定は、プログラムの目標が(トルクではなく)角度に設定されている場合にのみ使用できます。
STwrench戦略
ST レンチの導入
ST レンチは生産と品質管理の両方に使用できるトルクレンチです。パラメータの構成は、コントローラまたは ToolsTalk 2 を介して設定できます。
ST レンチは、無線接続を使用して、コントローラに接続できます。ST レンチは、コントローラ GUI、Web GUI、または ToolsTalk 2 GUI を介して構成できます。
ST レンチは締め付け セクションで構成し、他の締め付け戦略と同じワークスペースとメニューを使用します。
ST レンチには、高速バックアップユニット(RBU)があります。RBU は、レンチの機能を定義し、締め付けプログラムを保存します。コントローラは、生産タイプの RBU をサポートしています。
ST レンチのエンドフィッティングツール (ソケット) には、プログラム可能な番号の RFID タグが含まれています。このレンチは、この番号を使用して、ツールと、どのプログラムが使用できるかを自動的に認識します。RFID タグは、トルクと角度補正係数も保存します。
ST レンチには、生産締め付けと品質管理用の複数のプログラムがあります。プログラム、戦略およびパラメーターについての詳細は、ST レンチユーザーガイドに記載されています。
ST レンチは、ツールでサポートされ、レンチ - 生産とレンチ - 品質である締め付けプログラムのみをサポートできます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
STwrench 開始ステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
タグ番号 | オン :TAG チェックスイッチを有効にした後([構成]> [ツール構成]> [TAG チェック]> [オン] )、締め付けプログラムを実行するには正しいTAG番号が必要です。 オフ: タグ番号はチェックされません。 | オフ | |
必要なタグ番号 | タグ番号 = オン | この締め付けプログラムで必要なタグ番号。 | 1 |
リヒット検出 | パラメーターのオプションは次のとおりです。 完了またはオフ。 | オフ | |
トルク補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数の計算の詳細については、STWrench ユーザーガイド (印刷物番号 9836 4134 01) を参照してください。 パラメーターは、エンドフィッティングツールの RFID タグに保存されます。 | 1.0 | |
角度補正 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、ST レンチユーザーガイドを参照してください。 パラメーターは、エンドフィッティングツールの RFID タグに保存されます。 | 0° |
STwrench ランダウンステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
ランダウン完了は、締め付けステップが開始する時点であるサイクル開始として定義される ST レンチ文書にあります。
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
ランダウン完了トルク | ランダウン完了点の定義 | スマートヘッド最小ロード(通常、公称トルクの 5%)により変わります |
ラチェット時間 | 5000 ms |
ST レンチ締め付けステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット | ターゲットをドロップダウンメニューから選択します。 トルク 、 角度 、 トルクまたは角度 。 | トルク | |
目標トルク |
| 締め付けステップに対するターゲットトルクを定義します。 | 0 Nm |
目標角度 | 目標 = 角度 | 締め付けステップに対する目標角度を定義します。 | 360° |
トルク限度 | 目標 = トルク | スイッチによる選択。 自動または手動位置。 |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値 | 0 Nm |
最大トルク | トルク制限 = 手動 | 上限のトルク値 | 0 Nm |
角度限界 | 目標 = 角度 | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 自動または手動。 最大と最小の角度値が可能であり、選択できます | |
角度限界 | 目標 = トルク | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルクに達した時から設定します。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 | |
最後の角度監視トルク |
| 角度制限が監視される時点からのトルク値 | 18.75 Nm |
最小角度 | 角度制限 = オンまたは手動で | 角度値下限 | 324° |
最大角度 | 角度制限 = オンまたは手動で | 角度値上限 | 396° |
角度検索制限 | 角度制限 = 手動で | ||
トルク測定点 |
| ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 最大トルク値 ピーク角度時の値 |
|
最終的に目標を下回るNG |
| スイッチによる選択。 オンまたはオフ位置。 | オフ |
ボルト制限を変更します |
| 50 Nm |
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
トルク補正点 | トルク補正 = オン | 0° | |
PCT 距離 | トルク補正 = オン | 360° | |
PVT 間隔 | トルク補正 = オン | 180° | |
遅延監視 | トルク補正 = オン | 0° | |
最小トルク | トルク補正 = オン | 下限のトルク値 | 1 Nm |
最大トルク | トルク補正 = オン | 上限のトルク値 | 20 Nm |
補正値 | トルク補正 = オン | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 平均トルク ピークトルク |
ST レンチ停止ステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
終了サイクル時間 | トルクがサイクル開始を下回り、STレンチLEDで設定された3番目のパーセンテージ値に達した場合に適用されます。 | 100 ms |
STレンチ緩み
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
緩め制限 | このパラメーターが0を上回る値に設定されている場合、Power Focusは、締め付け中にこの値を超える負のトルクが適用されているかどうかを確認します。その場合、締め付けの全体的なステータスは「不合格(NG)」とマークされます。この機能は、レンチがサイクル開始に達したときに開始されます(締め付けを開始する前に、緩めが可能で、結果は生成されません)。この機能は、締め付け終了時の不要な緩めを検出するために使用します (たとえば、レンチがジョイントから外された場合など)。 | 0 Nm |
マルチステップ締め付け戦略
マルチステップ締め付けとは、複数のステップで行われる締め付けです。ステップ数およびステップのタイプは、行われる締め付けに応じて異なります。マルチステップ締め付けプログラムは、監視機能と制限を含む、高度な設定が可能です。マルチステッププログラムには、合計10個のステップを追加できます。
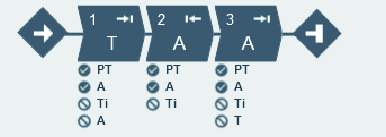
制限は、予期しない事態が発生した場合に確実に締め付けを停止させるために使用します。これらの制限では、例えば、最大トルク設定に達していないかどうか、またはマルチステップ締め付けの一部の実行に時間がかかりすぎないかどうかをテストできます。各ステップには、それぞれ最大 4 つの制限を設けることができます。各ステップには必須ステップ制限とオプションのステップ制限があります。必須制限は、新しいステップをマルチステッププログラムにドラッグすると設定されます。
モニターは、締め付けが仕様に従って行われたかどうかを確認するために使用します。例えば、角度制限やトルク制限などの確認が可能です。各ステップには、それぞれ最大 8 つのモニターを設けることができます。各ステップには必須ステップモニターとオプションのステップモニターがあります。必須のモニターは、新しいステップをマルチステッププログラムにドラッグするときに含まれます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
締め付けプログラムメニュー

リストの各行は、マルチステップ締め付けプログラム 1 つを表します。
ヘッダー | 説明 |
|---|---|
チェックボックス | 特定の締め付けプログラムを選択するために使用します。 |
タイトル | ユーザ定義名。 |
戦略 | 締め付けプログラムに選択されている戦略。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
目標 |
|
最終変更 | ToolsTalk 2 時間で表す時間。 |
変更者 | <ユーザー> によって変更された締め付けプログラム |
コントローラ更新 | コントローラ時間で表したコントローラ更新。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
プロパティサブタブ
プロパティ
パラメーター | 説明 |
|---|---|
名称 | マルチステッププログラムのユーザ定義名。 |
説明 | マルチステッププログラムの説明。 |
パラメーター | 説明 |
|---|---|
タイプ | 締め付けまたは緩め。 |
ねじ方向 | 時計回り (CW) または反時計回り (CCW) の回転方向。 |
緩めプログラム | 締め付けプログラムに接続する既存の緩めプログラムを選択します。 |
プログラム開始 | 間違ってプログラムが開始されるのを回避するため、トルクがこのトリガートルク値 (Nm) を初めて超えるとマルチステップ締め付けプログラムが開始されます。 |
プログラム終了トルク | マルチステップの締め付けを停止するトルク値を指定します。 |
プログラム終了タイムアウト | マルチステップの締め付けを停止する時間値 (秒単位) を指定します。 |
TrueAngle補正 | 特定のツールでは、締め付け時のツールの回転を検出、測定することができます。ツールが締め付け中に回転する場合、角度測定が壊れている可能性があります。ツールの動きが大きすぎる場合、締め付けの不具合につながる可能性があります。指定制限値内での変動について、コントローラは、これらの回転を補正し、正しい締め付けを行うことができます。 これは、仮想ステーションごとに利用可能な追加のライセンス機能です。 |
トレース構成
トレース構成は、プログラムレベルまたは各ステップで行うことができます。デフォルトの構成はプログラムレベルで設定され、必要に応じて各ステップで上書きできます。
ここで、この機能を有効にすると、構成をプログラムレベルで実行できます。
パラメーター | 説明 |
|---|---|
有効 |
|
サンプルタイプ |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します (0.25 〜 1000 ミリ秒) |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度) |
プログラムの制限
パラメーター | 説明 |
|---|---|
最大時間限度 | 秒で設定します。この制限は、締め付けの合計時間を確認し、時間高の限度を超えると、ツールは直ちに停止します。時間は、プログラムの開始から測定されます。 |
最大トルク限度 | この制限は、トルクを確認し、測定されたトルクがトルク高の限度を超えると、ツールは直ちに停止します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での角度制限をオンまたはオフにします。この制限は、角度が指定された角度制限内にあることを確認します。 |
ステップ単位でアクティブ | この制限が有効なステップの範囲を設定します。
|
トリガートルク | この制限が開始するトリガートルクの値を設定します。 |
上限 | 角度制限 (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での時間制限をオンまたはオフにします。この制限は、時間が指定された制限時間内にあることを確認します。 |
ステップ単位でアクティブ | この制限が有効なステップの範囲を設定します。
|
トリガートルク | この制限が開始するトリガートルクの値を設定します。 |
上限 | 時間制限 (プログラム) の上限を設定します。 |
プログラムモニター
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での角度モニタリングをオンまたはオフにします。このモニターは、角度が指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
タイプ | 角度モニタリングのタイプ:
|
トリガートルク | このモニターが開始するトリガートルクの値を設定します。 |
下限 | 角度モニタリング (プログラム) の下限を設定します。 |
上限 | 角度モニタリング (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体でのトルクモニタリングをオンまたはオフにします。このモニターは、トルクが指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
タイプ | 角度モニタリングのタイプ:
|
下限 | トルク監視 (プログラム) の下限を設定します。 |
上限 | トルク監視 (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での時間モニタリングをオンまたはオフにします。このモニタリングは、時間が指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
トリガートルク | このモニターが開始するトリガートルクの値を設定します。 |
下限 | 時間モニタリング (プログラム) の下限を設定します。 |
上限 | 時間モニタリング (プログラム) の上限を設定します。 |
確認
締め付けプログラムの構成中、入力された値はツール容量値と比較され、パラメータが選択された限度範囲外になることを防ぎます。多数の異なるツールが使用される場合、ユーザー定義の最大値が便利です。
パラメーター | 説明 |
|---|---|
ツール値に対する検証 | オンを使用して最大トルクと最高速度を手動で設定するか、選択したツールの値で検証するために特定のツールを選択します。 特定のツールを選択すると、特定のツールでサポートされていないステップとモニターには黄色の三角が表示されます。 |
最大トルク | 検証で使用される上限。これは数値角度値で表現されます。 |
最大速度 | 検証で使用される上限。これは、数値のrpm 値で表されます。 |
アッタチメントの調整
アタッチメント調整では、ツールでフロントアタッチメントを補正することができます。補正は、各締め付けプログラムに対して行うことができます。
オペレーターは、アタッチメントをホットスワップしてから、その特定のアタッチメントに対して調整した締め付けプログラムを選択することができます。
パラメーター | 説明 |
|---|---|
アタッチメント調整を使用 | はいまたは いいえ |
変速比 | アタッチメントギア比は、角度を補正するために必要です。 最小:0.5 最大:100 ソケット回転速度 = ツール速度/ギア比 |
効率の調整 | 効率の調整と組み合わせたアタッチメントのギア比は、トルクを補正するために必要です。 最小:0.5 最大:1.0 例えば、0.9 は 10 % の効率の損失を意味します。 |
レポーター
これにより、ユーザーは (モニター/制限から) どの値を最終値として表示するかを選択できます。[追加]をクリックして、プログラムモニター/制限値に関連付ける結果レポーターを選択します。
パラメーター | 説明 |
|---|---|
レポーター | 結果レポーターを選択します。 |
生成元 | 値を生成するモニター/制限を選択します。 |
値 | 選択した生成元で表示する値を選択します。 |
マルチステッププログラムの追加
追加ボタンを選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
締め付けプログラムの名前、インデックス番号 (締め付けの場合のみ)、操作モードを入力して、締め付け戦略にマルチステップを選択します。インデックスのアクティブな選択が行われていない場合、締め付けプログラムにはプログラムリストの次の続き番号が指定されます。
追加ボタンを選択します。
マルチステップには、プログラムのさまざまなパラメーターを入力できる[プロパティ]とプログラムを作成できる[締め付けエディタ]の 2つのサブタブがあります。
締め付けエディタ
ボタン
タイトル | 説明 |
|---|---|
ディスプレイ |
|
ズームイン | 締め付けプログラムを拡大表示にします。 |
ズームアウト | 締め付けプログラムを縮小表示にします。 |
画面に合わせる | ドラッグアンドドロップエリアに締め付けプログラム全体が表示されるように合わせます。 |
削除 | 選択項目を削除します。 |
修復領域
修復領域のステップは、同期点の状況がNGの場合に従うべき修復パスを示しています。
修復パスは常に同期点で開始および終了します。修復パスが再び締め付けパスに入る必要がある場所は柔軟ですが、修復パスは常にプログラムの先頭方向に戻る必要があります。
各同期点で開始できる修復パスは1つだけですが、複数の修復パスが同じ同期点で終了することは出来ます。
修復パスでは1~3ステップを実行する事が出来ます。
プログラムの開始から修復パスを定義することはできません。
例:修復パス
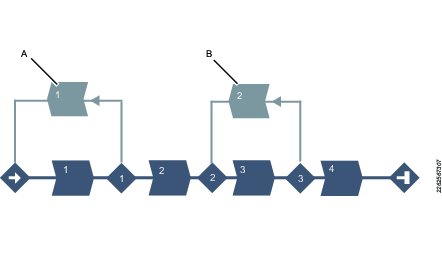
A | 最初の同期点からプログラムの開始点までのパスを修復します。 |
B | 3番目の同期点から2番目の同期点までの修復パス。 |
締め付けエリア
締め付け領域には、締め付け経路、つまり修復および終了経路を除いたマルチステップ締め付けプログラムのステップおよび同期点が含まれます。
締付けステップ数、制限事項、および許可されるモニター数
許容されるステップ数 | 許容される制限の数 | 許可されるモニター数 | |
|---|---|---|---|
PF6000/PF8 | 16 | 8 | 8 |
PF6000/PF8 Step Sync | 25 (同期ポイント、修復パス、終了パスを除く) | 8 | 8 |
Flex | 25 (同期ポイント、修復パス、終了パスを除く) | 8 | 8 |
IxB | 16 | 5 | 8 |
終了エリア
終了エリアのステップは、同期点の状況が致命的である場合に、たどる終了パスを示します。終了パスが完了すると、締め付けは終了します。終了パスは常に同期点から始まります。各同期点で開始できる終了パスは1つだけです。
終了パスで実行するステップ数は、1 ~ 3 です。
いつでもすべての同期点で終了することが出来ます。終了パスが定義されていない場合、プログラムは他のステップを実行せずに直接最後まで移動します。
例:終了パス
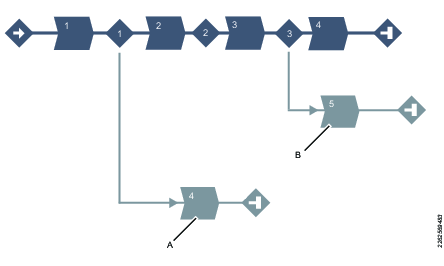
A | 最初の同期点からプログラムの終わりまでの終了パス。 |
B | 3番目の同期点からプログラムの終わりまでの終了パス。 |
構成
ステップ、制限、またはモニターを選択し、画面の下部にある構成をクリックして構成フィールドを開きます。複数のステップを選択するには、Ctrl を使用します。
[構成] フィールドには、修復エリアでどのステップ、モニタ、または制限が選択されているかに基づいた、ステップ、モニタ、および制限に対するさまざまなパラメータが含まれます。
必要なパラメータを入力します。
モニタまたは制限を削除するには、そのフィールドに表示されている 削除を選択します。
スピードシフトの使用
ステップ中に速度が変わる、角度トリガまたはトルクトリガを1~5個定義できます。
速度シフトは、[構成] フィールドに追加できます。
1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。
スピードシフトを追加するには:
スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加をクリックして、角度範囲またはトルク範囲を選択します。スピードシフトの角度/トルクのフィールドが開きます。
以下の表に従って値を追加します。
パラメータ | 説明 |
|---|---|
角度/トルク トリガー | > 0 であること。 |
速度 | > 0 であること。 |
速度ランプタイプ | ハードまたはソフト。 |
トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。
トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。
締め付けプログラムに警告が示されるとコントローラに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。
ツールボックス
ツールボックスには以下が含まれます:
ドラッグアンドドロップエリアのショートカットキー
ショートカットキー | 説明 |
|---|---|
スペースバー + カーソル | ドラッグ&ドロップエリアを移動します。 |
ドラッグアンドドロップエリアの機能
機能 | 説明 | |
|---|---|---|
|
|
|
ステップの追加 |  | ツールボックスでステップをつかみます。希望する位置にステップをドラッグします。可能な位置は水色の指示矢印で示されます。 |
___________ | __________________________ | _________________ |
ステップのマーク |  | ステップをクリックしてマークします。 |
___________ | __________________________ | _________________ |
ステップの移動 |  | ステップを移動させるには、ステップをクリックして、ボタンを押したままで動かします。 |
___________ | __________________________ | _________________ |
ステップのコピー |  | ステップをコピーするには、[Ctrl] ボタンをクリックしながら、ステップをドラッグアンドドロップします。 |
___________ | __________________________ | _________________ |
修復パスの追加 |  | 修復パーツを開始する同期点の上にステップを配置します。 |
___________ | __________________________ | _________________ |
修復ステップを追加 |  または  | 修復ステップを追加するには、修復エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 修復パーツを開始する同期点の上にステップを配置します。その後、ステップは修復パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
終了パスの追加 |  | 終了部分を開始する位置から同期点の下にステップを配置します。 |
___________ | __________________________ | _________________ |
終了ステップを追加 |  または  | 終了ステップを追加するには、終了エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 終了部分を開始する位置から同期点の下にステップを配置します。その後、ステップは終了パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
修復パスの終点を移動します。 |  | 小さな矢印をクリックして修復パスの終点を移動します。 |
___________ | __________________________ | _________________ |
制限とモニターの追加 | 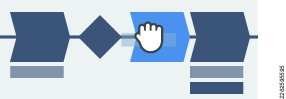 | ツールボックスで制限またはモニタをつかみます。制限またはモニタを目的のステップにドラッグします。制限またはモニタを追加できるステップは、明るい青色に変わることによって示されます。 |
___________ | __________________________ | _________________ |
禁止されている配置 | 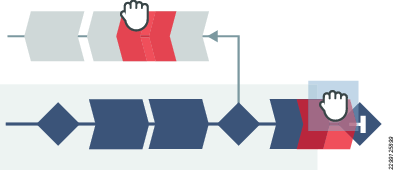 | 赤の矢印は、ステップを配置できないことを示します。 |
|
|
締め付けステップ
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
一般パラメーター
以下のステップ パラメータは多数のステップタイプで共通です。パラメータは、締め付けプログラムでステップを選択するときに表示されるステッププロパティウィンドウで設定しす。
パラメーター | 説明 |
|---|---|
名称 | ステップの名前。 |
回転方向 | 各締め付けステップは、前方 (ネジを締め付ける) または後方 (ネジを少し緩める) のいずれかで実行できます。矢印がこの方向を示します。角度に合わせて締め付け、トルクに合わせて締め付けなど、多くの締め付けステップには方向が前方にハードコードされています。角度に合わせて緩めやトルクに合わせて緩めなどのステップでは、方向が後方(逆方向)に自動的に設定されます。 リバースの設定は 、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールでは使用できません。締め付けプログラムの締め付け方向は、締め付けの実行を可能にするために、オープンエンドツールの締め付け方向と同じである必要があります。オープンエンドツールの締付けプログラムに緩めプログラムを割り当てることは可能ですが、方向スイッチが緩めプログラムを実行するように設定されている場合、ツールはロックされます。 |
ステップカテゴリ | 各ステップに、ステップカテゴリを選択するオプションがあります。ステップカテゴリを選択すると、NG 締め付けが、関連する詳細ステータスと該当するマルチステップエラー情報を示してイベント結果ビューにリスト表示されます。選択しないと、削除されたステータスは「未分類マルチステップエラー」に設定されます。関連する削除されたステータスは分類できます。 |
角度ウィンドウ | ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。 |
速度ランプ/加速(ToolsTalk 2でのみ使用可能) | ほとんどのステップで、目標速度までの加速を達成する方法を指定できます。ハード、ソフト、手動の 3 つの設定が指定できます。ステップが開始されるたびに、定義された加速が使用されます。ツールがステップの開始時に異なる速度ですでに作動していても、これに関わらずランプが使用され、ステップの目標速度まで加速されます。ステップの開始時の速度が目標速度より速い場合または遅い場合でも、同様となります。 |
速度ランプ - ハードおよびソフトモード |
|
速度ランプ - 手動モード |
|
スピードシフトの使用 | 速度がシフトするステップ中に、1~5個のアングルトリガーまたはトルクトリガーを定義することができます。 1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。 トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。 トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。 トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。 トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。 締め付けプログラムに警告が示されるとツールに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。 速度シフトは、[構成] フィールドに追加できます。スピードシフトを追加するには: スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加を選択します。次に、角度範囲またはトルク範囲を選択します。
|
ブレーキタイプ | マルチステップ締め付けプログラムの制動動作は、プログラムの2つの場所で制御することができます。締め付け方向の逆転に先行するステップ、および/または締め付けプログラムの最終ステップの2つの場所です。締め付けプログラムの他の場所にあるステップの一般設定から、制動パラメータを使用することはできません。制動はエルゴ停止または 慣性のいずれかに設定できます。エルゴ停止 はより人間工学的な締め付けの減速を可能にする一方、慣性 は工具を完全に制動します。 慣性には追加パラメータはありません。 エルゴ停止パラメータ
|
MCT モードで除外 | マルチステッププログラムのステップでは、[MCT モードで除外] オプションをオンにすることができます。マルチステッププログラムで MCT モードを使用する場合、[MCT モードで除外] がオンになっているステップは除外されます。 待機ステップまたは方向切り替えの前に間を置かれないように [MCT モードで除外] オプションをオンに設定してしまうと、MCT モードで実行時にエラーが発生します。 終了パスと修復パスは固定式システムでは無視されます。つまり、これらがトリガーされた場合、締め付けは NG MC 締め付けとしてマークされます。 MCT モードはテスト時にのみ使用してください。ツールを生産ラインに戻す前に、MCT モードが無効になっていることを確認してください。 |
次の締め付け手順は、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
A – 角度に合わせて締め付け/角度に合わせて緩め
TrR – トリガーリリースに合わせて緩める
T - トルクに合わせて締め付け/トルクに合わせて緩め
E – 噛み合わせ
SR - ソケット解除
DT – DynaTork に合わせて締め付け
TPT - TensorPulse トルクに合わせて締める / トルクに合わせて緩める
IT - インパルス トルクに合わせて締める / トルクに合わせて緩める
IA – 角度に合わせてインパルス締め付け/角度に合わせてインパルス緩め
AP - アダプティブパルス
ITrR – トリガーリリースに合わせてインパルス緩め
トレース設定
トレース構成がプログラムレベルで有効になっている場合、トレース分解能はステップレベルで構成できます。トレース設定の設定は、特定の各ステップでサンプリングを行う方法を定義します。
パラメーター | 説明 |
|---|---|
トレース設定 |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します (0.25 〜 1000 ミリ秒) |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度) |
このトレース記録では、サンプルレートはすべてのステップで同じではなく、サンプルレートは各ステップの構成に依存します。つまり、トレースはステップごとに1つのトレースに分割されます。
トレース内のサンプルの最大数は4096です。
締め付けによって4096個を超える値が生成される場合、ダウンサンプリングが実行されます。これは、締め付け全体から1秒おきのトレースサンプルを削除し、半分の分解能で記録を続行することによって行われます。このプロセスは、4096のサンプル制限に達するたびに繰り返されます。
合計で2048個以上が記録された場合、このプロセスにより、2048~4096個のサンプルがトレースされます。
4096 のサンプル個数の制限に達すると、設定されたトレースサンプル倍数に従わなくなります。代わりに、ダウンサンプリングが行われた回数に応じて、サンプル倍数が2倍または4倍などとなります。ただし、すべてのステップがダウンサンプリングされるため、ステップ間の関係は変わりません。ステップが別のステップと比較して2倍のサンプル時間で構成されていた場合でも、ダウンサンプリングが何回行われたかにかかわらず、最終トレースではこのサンプル時間が引き続き適用されます。
トレースチャンネル | 注記 |
|---|---|
トルク | トルクトランスデューサーを装備したすべてのツールで利用可能 |
角度 | すべてのツールで利用可能 |
トルク秒 | 2つのトルクトランスデューサーを備えたツールでのみ使用可能 |
角度秒 | 2つの角度トランスデューサーを備えたツールでのみ利用可能 |
電流 | すべてのツールで利用可能 |
勾配 | ステップ/制限/モニターが勾配値を生成する場合に使用可能 |
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 角度に合わせて締め付け/角度に合わせて緩め
ツール |
|---|
ES STR SL ST SR QST STB IxB |
A – 角度に合わせて締め付け
このステップでは、目標角度に達するまでツールが作動します。目標角度は、ステップの開始から測定されます。
A - 角度に合わせて緩める
このステップは、角度目標に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
パラメーター
パラメーター | 説明 |
|---|---|
目標角度 | 目標の角度。> 0 であること。 |
速度 | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標角度 |
マイクロビデオ
Cクラッチ
ツール |
|---|
BCV BCP |
このステップでは、クラッチが解放されるまで、プログラムされた速度を順方向に実行します。工具がクラッチの解放を報告すると、ステップはOKステータスで終了します。
クラッチステップを使用する締め付けプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
スピードコントロール | 一速または二速 |
最終速度 | プログラムの最終速度を設定します[rpm] |
速度ランプ | 速度ランプを選択できるスイッチ[ハード、ソフト] |
リヒット | リヒット検出をオンまたはオフに設定します |
リヒット角度 | リヒット角度を設定します[°] |
CLクラッチ緩め
ツール |
|---|
BCV BCP |
このステップでは、ツールのトリガが解除されるまで、プログラムされた速度で逆方向にツールを実行します。
クラッチステップを使用する緩めプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
最終 | プログラムの速度を設定します[rpm] |
DI – デジタル入力まで実行
ツール |
|---|
ES STR SL ST SR QST |
この手順では、[デジタル入力]で指定された入力が[停止条件]の値に応じて高または低になるまで、パラメーター方向によって定義された方向にツールを作動させます。
パラメーター | 説明 |
|---|---|
向き | 前方向または後方向 |
デジタル入力 | コントローラー上の次のローカルデジタル入力のいずれかを選択できます。
|
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
停止条件 |
|
速度 (rpm) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合に使用できます。既定:500 rpm/s。 |
マイクロビデオ
DT – DynaTork に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、 目標トルクに達するまで、ツールを速度nで順方向に作動させます。その後、ツールは DynaTork 時間中、目標トルクの DynaTork パーセンテージで電流を一定に保持します。
ツールの過熱を避けるため、ツールの最大トルクの 40% を超えて DynaTork を作動させないことを強く推奨いたします。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
DynaTork 時間 | DynaTorkがアクティブになる時間。 |
DynaTork パーセント | トルクターゲットのパーセンテージ。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 (rpm) | 既定:60 rpm。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | DynaTork 時間中に保持されるトルクレベル |
C | Ts のパーセンテージ |
D | Ts のパーセンテージ |
E | DynaTork 時間中に保持されるトルクレベル |
F | DynaTork 時間 |
マイクロビデオ
E – 噛み合わせ
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、ソケットがネジに噛み合うまで両方向にツールが作動します。ステップは、噛み合わなければ継続がはいに設定されている場合は、目標トルクまたは目標角度に達するまで継続します。いずれかの方向で目標角度に達すると、方向が反転します。噛み合わせの最大試行回数を入力すると、検索の繰り返し回数を制限できます。いずれかの方向で目標トルクに達すると、ステップは OK のステータスで終了します。
マイクロビデオ
Ext - 外部結果
ツール |
|---|
ES STR SL ST SR QST STB IXB BCP BCV 外部ツール |
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。この外部信号は、デジタル信号をコントローラに供給できるあらゆる手段 (I/O バスを介して) を介して供給できます。
信号が送信されると、結果ビュー (記録されているデータ) は、締め付けプログラム (指定されたトルク値、角度値、またはテキスト文字列) で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
パラメータ | 説明 |
|---|---|
トルク <目標トルク> | 希望する表示された目標トルク値の数値。例えば、クリック式レンチからの信号は <目標トルク> と表示されます。 |
角度 <目標角度> | 希望する表示された目標角度値の数値。例えば、クリック式レンチからの信号は <目標角度> と表示されます。 |
テキスト | 希望する表示されたテキストの英数字文字列。例:「オイルが交換されました」。 |
MWR - メカトロニック レンチ
ツール |
|---|
MWR |
メカトロニック レンチは、メカトロニック レンチ(MWR)と組み合わせてのみ使用できる特殊なステップです。
このステップは、他のステップと組み合わせて使用することはできません。このステップでは、制限は使用できません。デフォルトでは、このステップには次の3つのモニターがあります。ピークトルク、角度、およびクリックです。
パラメータ | 説明 |
|---|---|
緩め制限 | 締付け結果がNG(締め付け方向の間違い(緩め))とマークされた負のトルク(すなわち緩め方向のトルク)の数値。 (Nm)単位。 |
ツールサイズ | MWR-TAに取り付けられたエンドフィッティングツールの特定の長さの数値。(mm)単位。 |
ツールベンド | MWR-TAに取り付けられたエンドフィッティングツールの数値。 (°/Nm)単位。 |
リヒット角度ウィンドウ | トルクに達した場合に既にねじが締め付けられているかどうかを判断するための角度の数値。 (°)単位。 |
最大角速度 | ねじを締めることができる最大速度の数値。(°/ s)単位。 |
RD – ランダウン
ツール |
|---|
ES STR SL ST SR QST IxB |
ランダウンステップは、ネジがスレッドに入ってからネジヘッドが下位面に触れて着座ポイントに達する直前までの締め付けです。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
このステップは順方向の速度でツールを実行します。ランダウンタイプ、トルク、または着座に応じて、ステップの動作は次のとおりとなります:
ランダウンタイプ:トルクに合わせる:指定された目標トルクが見つかるとステップは停止します。
ランダウンタイプ:着座に合わせる:着座の勾配計算は、指定されたトルクトリガレベル Tt で始まります。トルクトリガが設定されていない場合は、ステップの開始時に勾配計算が開始されます。
勾配の計算は、 A d度離れた2つの角度点の間で行われ、次のように計算されます:(Tn – Tn-1)/(An – An-1)および、互いに続く2つの勾配がTSLOPEより大きくなるとすぐに 、着座点が見つかります。
パラメーター | 説明 |
|---|---|
ランダウンタイプ | トルクに合わせる または 着座に合わせる。 |
目標トルク | 既定:「設定なし」> 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
トリガートルク | ランダウンタイプが着座に合わせるである場合、[トリガートルク]フィールドが表示されます。 既定:「設定なし」> 0 であること。 |
デルタ角度 | ランダウンタイプが着座に合わせるである場合、 デルタ角度フィールドが表示されます。 既定:「0」> 0 であること。 |
トルクレート | ランダウンタイプが着座に合わせるである場合、[トルクレート]フィールドが表示されます。 既定:「0」> 0 であること。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 着座ポイント |
B | 角度デルタ |
C | トルクスロープ |
D | トルク目標 |
E | トルクトリガー |
SR - ソケット解除
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップは、目標角度に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
マルチステップ締め付けプログラムの締め付けパスの最後のステップとしてのみ、このステップの使用は許可されています。ただし、このステップの後に同期点を追加することは可能です。
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。 既定:3 度、0を超える必要があります |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
SZP - ゼロ位置を設定
ツール |
|---|
ES STR SL ST SR QST |
「ゼロ位置を設定」ステップは、信号設定ゼロ位置をツールに送ります。位置は360度ごとに1回繰り返されます。
「ゼロ位置まで緩める」または「ゼロ位置まで締める」の手順で、ツールをゼロ位置に戻すことができます。
このステップにはパラメータがありません。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
T - トルクに合わせて締め付け/トルクに合わせて緩め
ツール |
|---|
ES STR SL ST SR QST STB IxB |
T - トルクに合わせて締め付け
このステップでは、目標トルクに達するまで、プログラムされた速度でツールを順方向に実行します。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
マイクロビデオ
T – トルクに合わせて緩める
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、逆方向にこの速度でツールを作動させます。ステップを有効にするには、トルクが最初に目標トルクの110%を超えている必要があります。目標トルクは正の値に設定する必要があります。目標トルクに達すると、トルクが目標トルクを下回るまでステップが実行されます。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
T&A – トルクと角度まで締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この締め付けステップは、目標トルクおよび目標角度の両方に到達するまで、指定した速度でツールを順方向に実行します。
トルクの測定は、ステップの最初から開始します。
トルクトリガーが設定されていない場合、角度の測定はステップの開始時に開始されます。
トルクトリガーが設定されている場合、トルクトリガーに達した時点で角度測定が開始されます。
このステップは次の場合に終了します:
測定されたトルク >= 目標トルク (Ts)
AND
(測定された角度 - トルクトリガーで測定された角度) >= 目標角度 (As)。
パラメーター | 説明 |
|---|---|
目標トルク(Ts) | 既定値:0. |
目標角度(As) | 既定値:0. |
トルクトリガ(Tt) | 既定値:未設定。0 より大きく、かつ目標トルク (Ts) 未満であること。 |
速度(n) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | 目標角度 |
T|A – トルクまたは角度に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この締め付けステップでは、目標トルクまたは目標角度に到達するまで、指定した速度でツールを順方向に実行します。
トルクの測定は、ステップの最初から開始します。
トルクトリガーが設定されていない場合、角度の測定はステップの開始時に開始されます。
トルクトリガーが設定されている場合、トルクトリガーに達した時点で角度測定が開始されます。
このステップは次の場合に終了します:
測定されたトルク >= 目標トルク (Ts)
OR
(測定された角度 - トルクトリガーで測定された角度) >= 目標角度 (As)。
パラメーター | 説明 |
|---|---|
目標トルク(Ts) | 既定値:0. |
目標角度(As) | 既定値:0. |
トルクトリガ(Tt) | 既定値:未設定。0 より大きく、かつ目標トルク (Ts) 未満であること。 |
速度(n) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | 目標角度 |
T+A – トルクと角度に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップでは、目標トルクに達するまでツールを作動させます。この時点から、追加の目標角度まで継続して作動します。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
目標角度 | 目標の角度。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
TC – トルク校正
ツール |
|---|
QST |
この手順は、複数トランスデューサーツールでのみサポートされています。
トルク校正 ステップでは、目標トルクに達するまで、指定した速度でツールを順方向に実行します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
速度 | > 0 であること。既定:60 rpm。 |
トランスデューサー | トルク または トルク 2。既定:トルク。 フロントトランスデューサーを校正するには、[トルク 2] に設定します。 |
適合型制動 (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
ThCT – トルクに合わせてスレッドカット
ツール |
|---|
ES STR SL ST SR QST STB IxB |
トルクに合わせてスレッドカット機能では、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ネジを用いて金属の薄層を締め付ける際などの締め付けが可能になります。ツールは、スレッドカット角度 (Aw) に達するまで前方向に作動します。スレッドカット角度ウィンドウは、トルクがスレッドカットトリガートルク (Ttc) を初めて超える時点から測定されます。スレッドカット角度に達した点から、ステップは目標トルク (Tt) に達するまで連続して作動します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
スレッドカット角度ウィンドウ | 既定:0.> 0 であること。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | スレッドカット角度ウィンドウ |
TPT - TensorPulse トルクに合わせて締める / トルクに合わせて緩める
ツール |
|---|
STR IxB |
TensorPulseの締め付け/緩めステップを使用する前に、次のライセンスタイプがコントローラーにインストールされている必要があります。
低反力戦略
TensorPulseは、次のツールでのみ有効です:ETV-STR61-100-13、ETV-STR61-70-13、ETV-STR61-50-10、ITB-P。
このステップは、オープンエンドまたはクローズエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールをサポートしていません。
TensorPulse トルクに合わせて締め付け
このステップは、トルク目標に到達するまで、順方向に締め付けパルスを生成します。
TensorPulse トルクに合わせて緩める
このステップでは、トルクがトルク目標を下回るまで、逆方向の締め付けパルスを生成します。
TensorPulse締め付け/緩めステップを実行する場合は、必要な PulseDrive ソケット/アダプターを使用してください。
TensorPulse締め付け/緩めステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けが NG となります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメーター | 説明 |
|---|---|
トルク目標 - Ts | トルク目標は、0からツールの最大トルクまでの範囲である必要があります。 |
パルスエネルギー - Pe | パルスエネルギーは、各パルスのエネルギー/電流の量を制御するために使用されます。 パルスエネルギーは10%から100%の範囲である必要があります。 |
反力調整係数 | 反力調整係数は、TensorPulse ステップを実行する際の反力を調整するために使用されます。各パルスの後にツールを反対方向に動かすのは力です。 反力調整係数は、0〜100%の範囲である必要があります。 |
トレースでは、角度反転は、ツールが後方に回転してパルスを有効にすることを意味しますが、PulseDriveソケット/アダプターにより、ボルトヘッドは必ずしも後方に回転するわけではありません。
TrR – トリガーリリースに合わせて緩め
ツール |
|---|
ES STR SL ST SR STB IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップは、ツールトリガが解除される(緩められる)まで逆方向に作動します。これは、プログラムの最後のステップとしてのみ使用できます。
STB ツールでは、このステップは緩めプログラムのみに適用されます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
TTTR - トリガー解除まで締める
ツール |
|---|
ES STR SL ST SR STB IXB |
このステップは、ツールトリガが解除される(締め付けられる)まで作動します。締め付けプログラムの最後のステップとしてのみ使用できます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
W – 待機
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップでは、ツールは待機タイプ条件が満たされるまで待機します。待機中はツールが回転しませんが、 ホールド条件を指定できます 。
パラメーター | 説明 |
|---|---|
待機タイプ |
|
待機時間 | ツールが静止する秒数 - [待機タイプ] で [時間] が選択されている場合にのみ有効です。 |
ホールド条件 |
|
WP - レンチ生産
ツール |
|---|
STwrench |
STwrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチ生産 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
目標トルク | 締め付けステップに対するターゲットトルクを定義します。 |
トルク測定点 | トルクを測定する場所を指定します。 [ピークトルク] または [ピーク角度]のいずれかを選択します。
|
角度検索制限 | これは、締め付けのトルク結果値を設定するために使用されるオフセットです。このパラメータを使用するには、 測定トルクをピーク角度に設定する必要があります。 |
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
終了サイクル時間 | 終了サイクル時間を示すミリ秒 (ms)単位の数値。トルクがランダウン完了を下回ったときに適用されます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
補正値 | [平均トルク]または[ピークトルク]から選択します。補正値は、PVTの計算方法を指定します。 平均トルク - PVTは、以下を使用して計算された平均に基づきます:
ピークトルク - PVTは、着座が検出される前に測定されたピーク値に基づきます。 |
遅延監視 | PVT計算は、このウィンドウを通過する前に開始されず、締め付け開始時に開始されます。 |
PVT 間隔 | PVT距離ポイントから開始して、PVTウィンドウを計算する角度を設定します。 |
PVT 距離 | システムがPVTウィンドウを開始する着座前の角度を設定します。 |
プリベイリングトルク最小 | プリべリングトルクの下限。 |
プリベイリングトルク最大 | プリべリングトルクの上限。 |
マイクロビデオ
WQ - レンチの品質
ツール |
|---|
STwrench |
STwrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチの品質 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
Y – 降伏に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST IxB |
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点は、トルクと角度の距離測定を基に計算されるトリガートルクレベルをトルクが超えてから、トルク勾配を監視して検出されます。角度距離パラメータは、指定されたジョイントのハードさに応じて設定されます。
勾配角度ウィンドウを設定します (ハードジョイント、ソフトジョイント、角度ウィンドウの手動設定)。手動を選択する場合、角度ウィンドウを設定する必要があります。ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
パラメーター | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | 角度の測定は、このトリガから開始します。> = 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
降伏点のパーセンテージ | >= 20% であること |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | ピーク勾配 |
B | 降伏点 : |
C | シャットオフポイント |
D | 角度距離 |
E | トルクトリガー |
UM 2- 降伏に合わせて締め付け方法 2
ツール |
|---|
QST |
このステップでは、降伏点が検出されるまで、指定した速度でツールを順方向に実行します。
降伏点の検索は、トルクがTtに達したときに開始されます。Af度にわたるトルクの平均が計算されます。この手順はN rs回繰り返されます。
参照傾斜は、N rsにわたる線形回帰で計算されます。この後、新しい平均値は、A f の度数にかけて、継続的に計算されます。
実際の傾斜は、最後のN sの平均点にわたる線形回帰で計算されます。傾斜が参照傾斜のPy %より小さい場合、降伏点に達します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
フィルタ角度 | 既定:1.> 0 であること。 |
サンプル数 | 既定:6.>=4 であること。 |
pf サンプル数、基準 | 既定:6.>=4 であること。 |
降伏点のパーセント | 既定:90%。>20% であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | トルクトリガー |
B | サンプル数、参照 |
C | 実際の勾配 |
D | サンプル数 |
E | 基準勾配 |
F | フィルタ角度 |
ZP - ゼロ位置まで緩める
ツール |
|---|
ES STR SL ST SR QST |
このステップは、ゼロ位置に達するまで、ツールを逆方向に速度(N)で回転させます。ゼロ位置に到達するために回転する角度合計が最小角度 (Am) 度より小さい場合、回転はさらに 1 回転、360 度継続します。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
パラメーター
パラメータ | 説明 |
|---|---|
最小角度 | 最小角度 (Am) [°] |
速度 | 回転速度 (N) [rpm] デフォルト値は 60 rpm です。 |
ZP - ゼロ位置まで締める
ツール |
|---|
ES STR SL ST SR QST |
このステップは、ゼロ位置に達するまで、ツールを正転方向に速度(N)で回転させます。ゼロ位置に到達するために回転する角度合計が最小角度 (Am) 度より小さい場合、回転はさらに 1 回転、360 度継続します。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
パラメーター
パラメータ | 説明 |
|---|---|
最小角度 | 最小角度 (Am) [°] |
速度 | 回転速度 (N) [rpm]デフォルト値 60 rpm |
ステップモニター
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
ステップモニターは、角度制限やトルクなど、指定に従って締め付けが達成したことを検証する際に使用されます。各ステップには必須ステップモニターとオプションのステップモニターがあります。必須のモニターは、新しいステップをマルチステッププログラムにドラッグするときに含まれます。オプションのモニターは柔軟に設定でき、必要に応じてマルチステッププログラムに配置できます。各ステップには、それぞれ最大 8 つのモニターを設けることができます。
次のモニターは、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップモニター | 適用可能なステップ |
|---|---|
角度 | すべて |
ピークトルク | すべて |
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 角度
ツール |
|---|
ES STR SL ST SR QST STB IxB MWR-TA |
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。
角度の測定は、モニターの開始時、または指定されている場合は、モニター中に初めてトルクがトリガートルクを通過する時点から開始されます。
パラメーター | 説明 | デフォルト値 |
|---|---|---|
停止条件 | 角度測定の終了位置を指定します。
| シャットオフ |
トリガートルク | 角度の測定は、このトリガから開始します。 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 設定なし |
下限 | 最小許容角度 最小限度:0 以上である必要があります 最大限度:9 999 999 未満、かつ上限未満である必要があります | 設定なし |
上限 | 最大許容角度 最小限度:0 より大きく、かつ下限値より大きい必要があります 最大限度:9 999 999 未満である必要があります | 設定なし |
結果値
測定角度:モニターで測定された角度。
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 角度高制限 |
B | トルクトリガー | E | 測定角度 |
C | 角度低制限 | F | ステップ |
詳細については、画像をポイントしてクリックしてください。
A | ピークトルク | E | 角度高制限 |
B | シャットオフポイント | F | 測定角度 |
C | トルクトリガー | G | ステップ |
D | 角度低制限 |
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 角度高制限 |
B | トルクトリガー | E | 測定角度 |
C | 角度低制限 | F | ステップ |
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 測定角度 |
B | 角度低制限 | E | ステップ n-1 |
C | 角度高制限 | F | ステップ n |
AZP - ゼロ位置に調整
ツール |
|---|
QST |
このモニターは、プログラムの早い段階でゼロクロスモニターで測定した真のゼロクロス位置に戻るために使用されます。バックラッシュ角度は、プログラムの早い段階で測定された場合に使用されます。
パラメーター | 説明 |
|---|---|
低速 | 減速距離に到達したときに使用される速度。0 < [減速距離] < [速度] の範囲にする必要があります。 |
ゼロ位置調整 | ゼロクロス値からの目標位置。-9,999,000 よりも大きく、かつ 9,999,999 未満である必要があります。 |
減速距離 | 低速を使用する目標以前の角度。0 以上かつ 9,999,999 未満である必要があります。 |
速度 | 既定:60 rpm。ツール最大速度未満であること。 |
速度ランプタイプ | ハード、ソフトまたは手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
BA - バックラッシュ角度
ツール |
|---|
QST |
このモニターは、ソケットのバックラッシュ角度を監視します。バックラッシュ角度測定ステップで使用します。
パラメーター | 説明 |
|---|---|
上限 | 角度上限。9,999,999 未満であること。 |
BM -バックラッシュ角度測定
ツール |
|---|
QST |
このモニターは、ソケットのバックラッシュ角度を測定します。得られた角度は、ゼロ位置調整モニターの計算に使用されます。
パラメーター | 説明 |
|---|---|
向き | 測定が終了した方向。 |
目標トルク | トルク目標。>= 0 であること。 |
速度 | 既定:60 rpm。>= 0 であること。 |
速度ランプタイプ | ハード、ソフトまたは手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
C - 電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、トルクがトルクトリガーを通過した後の任意の時点における実際の電流を測定します。結果は、モニターを NG にした最初のピーク値または低い値になります。OK の場合、結果は最後に測定した電流値になります。モニター中にトルクトリガーに到達しない場合は、NG ステータスで終了し、測定値はありません。
パラメータ | 説明 |
|---|---|
トルクトリガ | > = 0 かつ < ツール最大トルクであること。 |
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
Cl - クリック
ツール |
|---|
MWR-T MWR-TA |
このステップモニターは、IxB ツールでは使用できません。
クリックトルクとクリック角の結果を有効にするためのモニターです。このモニタには設定がなく、MWRのステップでのみ使用できます。
LD - 緩め検出
ツール |
|---|
STwrench |
このステップモニターは、STwrench ツールでは使用できません。
このモニターを使用して、トルクと方向をチェックし、 STwrench のレンチ生産ステップ戦略を使用している場合に緩めが試みられてたかどうかを確認できます。かけられたトルクが、プログラムで構成されたねじ方向と反対方向の緩め制限に対して設定された値を超えた場合、結果はNGとして報告されます。
MT – 平均トルク
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、モニター中に平均トルクを測定し、計算値が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
タイプ | 開始条件を指定します:
|
トルクトリガ | [タイプ] が [トリガートルク]、[角度トリガー]、または [角度ウィンドウ]に設定されている場合に使用できます。> = 0 かつ < ツール最大トルクであること。 |
角度トリガ | [タイプ] が [角度トリガー] または [角度ウィンドウ]に設定されているときに使用できます。> 0 であること。 |
角度ウィンドウ | [タイプ] が [角度ウィンドウ]に設定されている場合に使用できます。> 0 であること。
|
時間間隔 | [タイプ] が [時間間隔] に設定されている場合に使用できます。> 0 であること。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PC - パルスカウント
ツール |
|---|
STR |
このステップモニターは、次ツールでは使用できません。
ETV-STR61-100-13
ETV-STR61-70-13
ETV-STR61-50-10
パルスカウント ステップモニタを使用する前に、コントローラに 低反力戦略 ライセンスをインストールする必要があります。
このモニターはパルス数を測定し、パルス数がパルスカウント下限とパルスカウント上限の間にあるかどうかを確認します。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウントステップモニターで締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメータ | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント上限は、1〜9999999の範囲である必要があります。パルスカウント下限以上である必要があります。 |
パルスカウント下限 - n- | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント下限は、1〜9999999の範囲である必要があります。パルスカウント下限以下である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
PrT - プリベリングトルク
ツール |
|---|
ES STR SL ST SR QST STB IxB |
モニターはウィンドウの長さでプリベリングトルク値を計算し、それがトルク制限内であることを確認します。角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点から始まります。計算されたプリべリングトルク値は、ウィンドウ長さ中の平均値またはピークトルク値です(ユーザーが設定したパラメータによります)。計算された値は、測定されたプリベリングトルクの結果データとして保存されます。トルク補正をオンに設定すると、測定されたプリベリングトルクが、連続ステップのすべてのトルク結果値から減算されます。以前に計算されているプリベリングトルク補正値は、トルク結果値からは減算されなくなります。トルク補正がオフに設定されている場合、連続ステップで減算は行われません。
ステップの合計角が、開始角度とウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
プリべリングトルクは、測定値の平均として、またはピークトルクで測定できます。これら 2 つのモードの間で選択するには、[値の使用] パラメータを平均トルク (平均値の場合) またはピークトルク (ピーク値の場合) に設定します。
パラメーター | 説明 |
|---|---|
トルク補正 | オンまたはオフ。 |
開始角度 | > 0 であること |
ウィンドウ長さ | >= 0 であること |
下限 | > 0 であること |
上限 | >= 0 であること |
使用する値 | 平均トルク (平均値の場合)、またはピークトルク (ピーク値の場合)。 |
PT – ピークトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB MWR-TA MWR-T |
このステップモニターは、監視中に達した、オーバーシュートを含む最大トルクを測定し、それが上限と下限の間にあることを確認します。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PTCA – ポストスレッドカット角度
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。
トリガートルクレベルは、スレッドカット角度ウィンドウの終了に達するまで無視されます。その後、測定トルクがトリガートルクを超えると同時に角度の測定が開始されます。
パラメーター | 説明 | デフォルト値 |
|---|---|---|
停止条件 | 角度測定の終了位置を指定します。
| シャットオフ |
トリガートルク | 角度の測定は、このトリガーから開始します。 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 0 |
下限 | 最小許容角度 最小限度:0 以上である必要があります 最大限度:9 999 999 未満、かつ上限未満である必要があります | 設定なし |
上限 | 最大許容角度 最小限度:0 より大きく、かつ下限値より大きい必要があります 最大限度:9 999 999 未満である必要があります | 設定なし |
スレッドカットトリガートルク | 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 設定なし |
スレッドカット角度ウィンドウ | 最小限度:0 以上である必要があります 最大限度:9 999 999 未満である必要があります | 0 |
結果値
測定角度:モニターで測定された角度。
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | E | 角度低制限 |
B | トルクトリガー | F | 角度高制限 |
C | トルクトリガー スレッドカット | G | 測定角度 |
D | スレッドカット角度ウィンドウ |
PTCPT – ポストスレッドカットピークトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
オーバーシュートを含む、監視中に達した最大トルクを測定し、それがトルク制限内であることを確認します。すべてのトルク値は、スレッドカット角度ウィンドウの終了に達するまで無視されます。
パラメータ | 説明 |
|---|---|
スレッドカットトリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PVTH - ポストビュートルク高
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、角度ウィンドウの長さ内のすべてのトルク値が上限を下回っていることを確認します。
角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点で開始します。モニターに使用されるトルク値は、サンプル数について計算される平均トルク値に基づきます。ステップの合計角が、開始角度と角度ウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
上限 | 最高許容トルク |
PVTL – ポストビュートルク低
ツール |
|---|
ES STR SL ST SR QST STB IXB |
ポストビュートルク高のモニターと同様ですが、このモニターは角度ウィンドウの長さのすべてのトルク値が下限より大きいことを確認します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
下限 | 最低許容トルク |
SOC - シャットオフ電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
シャットオフ点は、ステップがその目標に達する点です。電流は、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
SOT – シャットオフトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
シャットオフ点は、ステップがその目標に達する点です。トルクは、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
SSD - スティックスリップ検出
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップモニターは、ステップ中のスティックスリップ効果を検出し、報告します。検出は、トルクがトリガレベルを下回った回数を数えることによって行われます。回数が 最大振動数より大きい場合、スティックスリップエラーが報告されます。モニターは、動的と固定の 2 つのモードで動作します。このモード間の違いは、トリガレベルの計算方法です。
動的トルク:トリガーレベルは、監視中に到達した電流の最大トルクのピークトルクパーセンテージとして動的に計算されます。監視は、トルクがトリガートルクを越えると同時に開始されます。
固定トルク:トリガーレベルは、ユーザーの指定する固定されたトリガートルクです。このモードでは、パーセンテージは必要ありません。
トルクがトリガートルクに達しない場合、モニターは開始されず、ステータスは NG になります。
パラメータ | 説明 |
|---|---|
タイプ | モニタの [スティックスリップ検出] で実行する [スティックスリップ検出] の種類を指定します。既定:動的トルク |
ピークトルクパーセンテージ | 既定:80%、>=10 かつ <100 であること。 |
トリガートルク | 既定:5、> = 0 かつ < ツール最大トルクであること。 |
最大振動数 | 既定:5、>=3 かつ <20 であること。 |
TAW – 角度ウィンドウのトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、角度ウィンドウ内のすべてのトルク値がトルク制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | > 0 であること |
ウィンドウ長さ | <= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
ウィンドウを通過した場合はNG | [はい]に設定すると、角度ウィンドウの終わりに達していない場合、このモニターのステータスはNGになります。 |
TC – トルク校正
ツール |
|---|
QST |
このステップモニターは、複数トランスデューサーを備えたツールでのみ使用できます。
トルク校正モニターは、到達した最大トルクがトルク制限内であることを確認します。
パラメーター | 説明 |
|---|---|
Transducer type (トランスデューサータイプ) | トルク または トルク 2 ツールのフロントトランスデューサーの [トルク 2] に設定します。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TG - トルク勾配
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、勾配が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
エンドポイントチェック | [はい]に設定すると、ステップのシャットオフポイントで測定された勾配のみが制限内にあるかどうかがチェックされます。 |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最低許容トルク勾配。>= -100 であること。 |
上限 | 最大許容トルク勾配。> -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
角度オフセット | エンドポイントチェックがいいえに設定されている場合に使用できます。トリガートルクを初めて通過した後、勾配の計算が開始する角度を指定します。 |
Ti – 時間
ツール |
|---|
ES STR SL ST SR QST STB IXB |
監視中の経過時間を測定し、時間制限内であることを確認します。時間の測定は、モニターの開始時に開始されるか、トリガートルクが指定されている場合は、監視中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | > = 0 かつ < ツール最大トルクであること。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TRD – トルクレートと偏差
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップモニターは、トルクと角度の比であるトルクレートを測定して確認します。計算されたトルクレートは、上限 と 下限 で定義されているトルクレート制限内にあることが確認されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 角度の始点のトルク。 |
開始ポイント角度 | トリガートルクで開始点の角度が測定されたら、トルクの測定が開始されます。 |
降伏ポイント角度 | トルクの測定を停止する角度点。 |
終了ポイントトルク | トルクの測定が停止されるトルク。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
限度 | > 0 であること |
YA – 降伏点からの角度
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、降伏点から到達したピーク角度を測定し、ピーク角度が制限内であることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
降伏点のパーセンテージ | >= 20% であること |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最小許容角度>= 0 であること |
上限 | 最大許容角度> 0 であること |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
ZC - ゼロクロス
ツール |
|---|
QST |
このモニターは、スプリング圧縮の実際の開始を計算します。
パラメーター | 説明 |
|---|---|
トリガートルク | 監視が開始する時点からのトルク値。終点ポイントトルク未満である必要があります。 |
終了ポイントトルク | 測定停止時のトルク値。トリガートルクより大きい必要があります。 |
開始ポイント角度 | 監視が開始する時点からの角度値。終了ポイントトルク未満である必要があります。 |
降伏ポイント角度 | 測定停止時の角度値。開始ポイントトルクよりも大きい必要があります。 |
トルクレート上限 | 最大トルクレート。トルクレート下限未満で、かつ 999 未満である必要があります。 |
トルクレート下限 | 最小トルクレート。999 未満で、トルクのレート上限未満である必要があります。 |
ステップ制限
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
予期しない事態が発生した場合に確実に締め付けを停止させるために、マルチステップ締め付けプログラムに制限を追加することができます。これらの制限では、例えば、最大トルクに達していないことや、マルチステップ締め付けの一部の実行に時間がかかりすぎないことをテストできます。各ステップには独自の必須ステップ制限とオプションのステップ制限があります。必須制限は、新しいステップをマルチステッププログラムにドラッグすると設定されます。すべてのステップには、それぞれ最大 4 つの制限を設けることができます。
Power Focus 6000 と Power Focus 8の同期締め付けでは、締付プログラムで同期点を使用できます。制限に設定された条件が満たされた場合、ツールは直ちに停止し、プログラムは次の同期ポイント(Power Focus 6000、Power Focus 8、Flex でのみ有効)、またはプログラムの最後にジャンプします。同期締め付け のないコントローラーでは、ツールはただちに停止し、プログラムはプログラムの最後にジャンプします。
Flex の場合のみ:
各制限ごとに、[修復可能] = [はい]を選択すると、締め付けが停止したときに再試行できるようになります。
次の制限が、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップ制限 | 適用可能なステップ |
|---|---|
最大時間 | 外部結果とMWRを除くすべて |
最大トルク |
|
最大角度 |
|
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 最大角度
ツール |
|---|
ES STR SL ST SR QST STB IXB |
角度を測定する制限です。測定した角度が最大限度に達すると、ツールは直ちに停止します。角度は制限の開始から測定されるか、指定されている場合は、制限中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 指定されている場合、これは角度が測定されるトルクです。 |
最大限度 | この限度に達すると、ツールは直ちに停止します。 |
C - 電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このステップ制限は Power Focus XC ではサポートされていません。
この制限は、トルクがトルクトリガーを通過する実際の電流をチェックします。実際の電流が制限値を超えると、ツールは直ちに停止し、プログラムは次の同期点またはプログラムの最後にジャンプします。結果は、モニターを NG にした最初のピーク値または低い値になります。OK の場合、結果は最後に測定した電流値になります。制限中にトルクトリガーに到達しなかった場合、ステータスは OK で終了します。
パラメータ | 説明 |
|---|---|
トルクトリガ | > = 0 かつ < ツール最大トルクであること。 |
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
CTh – 食違いネジ
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限は、トルクが開始トルク (T1) を超える時点から、トルクが終了トルク (T2) を超える時点までの角度を確認します。開始トルク (T1) から測定される角度が、最大限度 (Amax) より高い場合、ツールが直ちに停止します。
トルクが終了トルク (T2) を超えると、測定された角度が最小限度 (Amin) と比較して確認されます。角度がこの制限より低い場合、ツールは直ちに停止します。
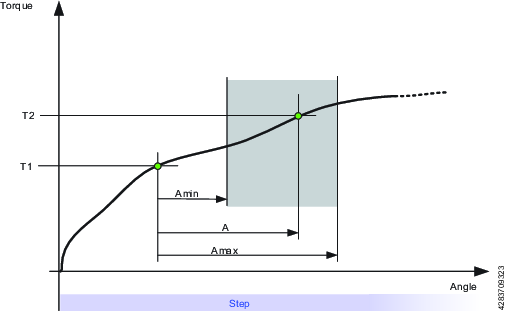
パラメータ | 説明 | 図中 |
|---|---|---|
開始トルク | <=0 であること。 | T1 |
終了トルク | <=0 であること。 | T2 |
最小限度 | 角度の下限。 | Amin |
最大限度 | 角度の上限。 | Amax |
PCH - パルスカウント高
ツール |
|---|
STR IxB |
この制限は、次のツールでのみ使用できます:
ETV-STR61-100-13
ETV-STR61-70-13
ETV-STR61-50-10
ITB-P
パルスカウント 制限を使用する前に、コントローラーに 低反力戦略 ライセンスをインストールする必要があります。
この制限により、パルスカウントが制限され、指定したパルスカウント上限を下回っていることが保証されます。
測定されたパルス数がパルスカウント上限を超える場合、ツールは直ちに停止し、プログラムは次の同期ポイントまたはプログラムの終了に進みます。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウント高ステップ制限で締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメーター | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント上限は、1〜9999999の範囲である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
Rh - リヒット
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この制限はトルクをチェックします。測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付け および Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。
マルチステップ締め付けプログラムの最初のステップにのみステップリヒット制限を追加できます。最初のステップにリヒット制限が追加されると、締め付けプログラム内の他の位置にステップを移動させることはできません。締め付けプログラムの他の位置に移動させるには、最初のステップからリヒット制限を削除する必要があります。
パラメーター | 説明 |
|---|---|
検出トルク | 測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付け および Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。ゼロより大きくなければなりません。 |
角度ウィンドウ | 角度ウィンドウは、ステップの開始から測定されます。角度ウィンドウが設定されていない場合、制限はステップ全体でアクティブになります。 |
RT - トルクの無効化中
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この制限はトルクをチェックします。測定されたトルクがツール制限の条件を下回ると、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付けおよび Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。
トルク制御プロセス
制限条件は、測定されたトルクです。制限が有効になるには、トルクはトルクの無効化限度の 110 % を超える必要があります。角度制御プロセス
この制限は、制限中に到達した最大トルクをチェックします。制限が有効になるには、トルクがまず、トリガートルクを超える必要があります。
パラメーター | 説明 |
|---|---|
トルク限度の解除 | 既定:10 Nm。> 0 であること。 |
パラメーター | 説明 |
|---|---|
トリガートルク | > 0 であること。 |
ピークトルクのパーセンテージ | 既定:95.>= 50 であること。 |
トルクタイムの解除 | 既定:20.>=5 かつ <=500 でなければなりません。 |
トルクの無効化角度 | > 0 であること。 |
ケーブルツールには角度に関するトルクの無効化を選択するオプションがあります。この制限は、次の2つのパラメータで制御されます:ピークトルクのパーセンテージ および トルクの無効化時間。パーセンテージは、最終ピークトルクからの下方偏移を設定し、トルク無効化時間はその偏移の期間(5~500 ms)を設定します。両方の条件(設定された期間の示されたパーセンテージ以下)が満たされる場合にのみ、プログラムが中断され、最後にジャンプします。
T - 最大トルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限はトルクをチェックします。測定したトルクが最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | トルクがこの指定された制限に達すると、ツールはすぐに停止します。 |
TAW – 角度ウィンドウのトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限は、角度ウィンドウの長さの測定されたトルクがトルク制限内であることを確認します。測定されたトルクが限度範囲外の場合、ツールは直ちに停止し、プログラムは最後にジャンプします。角度ウィンドウの長さは、トルクが初めてトリガートルクを越える時点から、開始角度で開始されます。トリガートルクが設定されていない場合、開始角度は制限の開始時に開始されます。
角度ウィンドウの長さの終了に達しない場合、制限のステータスは NG になります。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
最小限度 | >= 0 であること |
最大限度 | < = 最小値であること |
TCD - トルクと電流の偏差
ツール |
|---|
ES STR SL ST SR QST IXB |
制限は、該当するトルクに変換されたすべての電流測定が、トルクトランスデューサで測定された実際のトルクからの差が最大偏差であることを検証します。制限は、ステップ中にトルクが初めてトリガートルクに達すると開始され、ステップがその目標に達するまで有効です。
トリガートルクに達しない場合は、モニターは OK を報告します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
最大偏差 | 既定:1、> 0であること |
TG - トルク勾配
ツール |
|---|
ES STR SL ST SR QST IXB |
この制限は勾配を確認し、それが限度の範囲外の場合、ツールが直ちに停止され、プログラムはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | > 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
最小限度 | >= -100 であること。 |
最大限度 | > -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
Ti – 最大時間
ツール |
|---|
ES STR SL ST SR QST STB IXB |
時間を確認する制限です。最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | この時間が経過すると、ツールは直ちに停止します。 |
マルチステッププログラムの削除
各々の多段階プログラムを削除するには、ワークスペース領域の一番左の列にあるチェック・ボックスをマークしてください。
管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。
選択されたマルチステッププログラムが削除され、リストが更新されます。
STB ツールとマルチステップ
ワイヤレスである STB ツールの性質のため、一部のマルチステップ機能と動作は異なる場合があります。ここに示す一般的な制限のほかに、必要な場合は、マルチステップ機能の説明に STB ツールの追加情報を示します。
プログラムの検証
すべての締め付けプログラムは、プログラムがツールにダウンロードされる前に、STB ツールとの互換性が検証されます。選択した締め付けプログラムにツールとの互換性がない場合は、ツールはロックされます。このエラーが発生すると、イベント 5030、「構成の複雑性を超えました」がトリガされます。
ツールをロック解除するには、締め付けプログラムの複雑性を低下させるか、別の締め付けプログラムを選択します。
結果レポーター
結果レポーターを使用すると、選択した生成元の特定の値を結果から抽出できるようになります。結果レポーターはステップに属しますが、値を読み取るモニター/制限に関連付けられている必要があります。結果レポーターと同じステップにあるモニターまたは制限のみを選択できます。結果レポーターはドラッグ・アンド・ドロップを使用して(モニターや制限と同じ方法で)ステップに追加します。各結果レポーターは、特定の結果値(ランダウン角度、最終トルク、プリべリングトルクなど)を報告する役割を担います。
結果レポーターは以下に関連付けることが可能です:
プログラムモニター
ステップモニター
ステップ制限
各結果レポーターは、最終的な値のタイプを定義します:
最終角度
最終トルク
プリベイリングトルク
セルフタップトルク
電流
ランダウン角度
パルス数
一般パラメーター
パラメータ | 説明 |
|---|---|
生成元 | 値を生成するモニター/制限を指定します。 |
値 | 選択した生成元で表示する値を指定します。 |
制限事項:
メインパスのステップまたはプログラムモニター/プログラム制限に属するモニター/制限にのみ、結果レポーターを追加することが可能です。
タイプが異なる場合、ステップに複数のレポーターが存在する場合があります。
たとえば、すべてのステップおよびプログラムモニター角度に、タイプ最終角度の結果レポーターが存在する場合があります。
複数の結果値を持つモニター/制限において、結果レポーターのタイプが異なる場合は、複数の結果レポーターを追加する事が可能です。
ステップ中またはプログラムモニター/制限中には、同じタイプの結果レポーターが複数存在しない場合があります。
存在する最終値タイプ当たりレポートされる結果は 1 つのみです。
ルール:
結果アイテムの内部番号は、対応する結果レポーターの内部番号と同じである必要があります。
モニタ/制限の結果の内部番号は、構成内のモニタ/制限の内部番号と同じである必要があります。
ステップの結果は、実行の順序に従って順序付けする必要があります。最初に実行されるステップは最初に配置する必要があります。
モニター/制限/ステップに存在する場合、結果レポーターによって報告され得る値:
モニター/制限の測定値(浮動小数点または整数)
モニター/制限の上限と下限
ステータス
トルクトリガーと角度トリガー
角度目標とトルク目標(ステップから読み取り)
ステータスの可能な値:
低
OK
高
その他
未設定
目標値はどのステップモニターにも属さないため、目標値はモニターが属するステップから取得されます。
マルチステップテンプレート
作成されたすべてのテンプレートは、マルチステッププログラムを作成するときに、タブテンプレートに表示されます。テンプレートは挿入 (ドラッグアンドドロップ) でき、新しいマルチステッププログラムを構築する基盤となります。
テンプレートは、ステップが追加されていないときに限り、マルチステッププログラムにドラッグできます。マルチステッププログラムにテンプレートをドラッグすると、ステップを追加できます。
マルチステップ締め付けプログラムを変更しても、テンプレートはプログラムにリンクされているのではなく、コピーされているので、テンプレート自体には影響しません。
ライブラリ> プログラムテンプレートでマルチステッププログラムテンプレートを作成します。
ステップ構成の段階
コントローラ締め付けプログラムでは、プログラムを実施するためにパラメータを設定する必要があります。戦略と、目標トルクまたは目標角度のどちらかの選択は必須です。その他の設定はオプションです。さらに、トルクまたは回転角度が維持しなければならない範囲で限度を加えることで、実行中の締め付けを監視することも可能です。
締め付け手順は次の 4 つの段階に分かれます。[開始]、[ランダウン]、[締め付け]、[停止]。
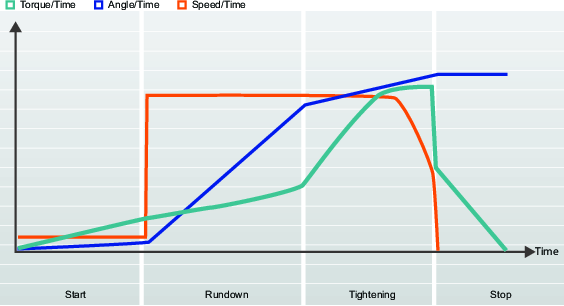
この図は、一般的に説明される締め付けを示します。曲線は時間の経過に伴う速度、トルク、角度の変化を表します。すべての締め付け戦略はこのように表されます。パラメータ、監視、限度も詳細な図に示されます。
タスクは、トリガが押された時点から、締め付け目標に到達するか、エラーが発生するまでで定義されます。
締め付け戦略と特定のパラメータ設定を組み合わせることで、締め付けプログラムが作られます。
ユーザーは多数の締め付けプログラムを作成して、その 1 つを実行時に選択できます。
真の角度補正
特定のツールでは、締め付け時のツールの回転を検出、測定することができます。ツールが締め付け中に回転する場合、角度測定が壊れている可能性があります。ツールの動きが大きすぎる場合、締め付けの不具合につながる可能性があります。指定制限値内での変動について、コントローラは、これらの回転を補正し、正しい締め付けを行うことができます。
これは、仮想ステーションごとに利用可能な追加のライセンス機能です。
ツールの回転が締め付け時に指定されている限度外となった場合は、締め付けが中止され、NG が報告されます。追加情報でツール移動超過が報告されます。
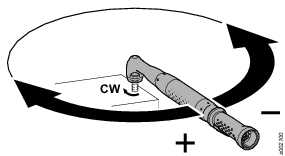
パラメータ | 説明 | デフォルト |
|---|---|---|
負の角度制限 | ツールの最大の負の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。これは数値角度値で表現されます。 | 有効にすると、値が -30 度に設定されます |
正の角度制限 | ツールの最大の正の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。これは数値角度値で表現されます。 | 有効にすると、値が +30 度に設定されます |
STB ツールには、ツールの移動を測定する機能がありません。真の角度補正がオンに設定されると、エラーメッセージの無効な締め付けプログラムが、追加情報の機能がツールでサポートされていませんと共に表示されます。
電流モニタリング
電流モニタリングは、締め付けトルクをモニタするための高度なセキュリティを提供し、ツール内のトルクセンサを補完するものです。
最終目標トルクで、回転子電流が測定され、トルク値に変換されます。計算したトルクが測定トルクの 10% 以内であれば、締め付けは、OK とみなされます。
パラメータ | 説明 | デフォルト |
|---|---|---|
電流監視 | オン/オフ位置のあるスイッチ オフ: 現在の監視が無効になり、ツールトルクは、トルクセンサによって測定されます。 オン: 電流は最終トルク目標で測定され、トルク値に変換されます。計算トルクは、測定トルクと比較されます。差が 10% 以内であれば、締め付けは OK とみなされます | オフ |
開始段階
開始段階で締め付けを開始すると、ソケットとネジの検索が可能になります。
パラメーター名 | 状態 | 説明 |
|---|---|---|
ソフトスタート |
| ねじ切りをを容易にするために、ツールの速度、角度、最大トルクの設定ができます。 オフ: ソフトスタートがオフになります。 オン: ソフトスタートがオンになります。 |
Speed (速度) | ソフトスタート = オン | ソフトスタート時の速度を定義します。 |
角度 | ソフトスタート = オン | ボルトがネジに入るようスピンドルの回転ターゲット角度を定義します。 |
最大トルク | ソフトスタート = オン | ソフトスタート時にかかるトルク上限値を定義します。トルク最大値を超過すると、締め付けが中止され、エラーメッセージが表示されます。締め付けは NOK とみなされます。 |
正 | 真の角度 | ツールの最大の正の回転を定めます。値が超過すると、締め付けが終了し、エラーが報告されます。これは数値角度値で表現されます。 |
負 | 真の角度 | ツールの最大の負の回転を定めます。値が超過すると、締め付けが終了し、エラーが報告されます。これは数値角度値で表現されます。 |
ランダウン段階
ランダウンのはじめに
ランダウンステップは、ネジがスレッドに入ってからネジヘッドが下位面に触れて着座に達する直前までの締め付けの一部です。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
機能 | 状態 | 説明 |
|---|---|---|
セルフタップ | オプション | 自己スレッドスクリューに関して使用されます。 |
ランダウン速度 | 選択可能 |
|
ランダウントルク範囲 | オプション | トルクを監視し、値が制限内であることを確認します。 |
ランダウン角度範囲 | オプション | 角度を監視し、値が制限内であることを確認します。この機能を有効にすると、時間モニターが自動的に有効になります。 |
ポストビュートルク | オプション | トルクピークの監視に使用されます。オンまたはオフに切り替えることができます。 |
ランダウン完了トルク | 必須 | ランダウンの最終ターゲット値。このトルクに達すると、プログラムは締め付けを開始できます。 |
ランダウンセルフタップ、トルクに合わせてスレッドカット
セルフタップ - トルクに合わせてスレッドカット機能では、例えば、自己ネジ切り (またはセルフタッピング) ネジを用いて金属の薄層を締め付ける際など、必要なランダウントルクが完全なランダウントルクより大きい場合の締め付けが可能になります。トルク値が SelftapTorqueMin/2 になると、セルフタップウィンドウが起動します。トルクは SelftapTorqueMin より大きくなければなりませんが、角度ウィンドウの間、Selftap-Torque-Max を超えてはなりません。
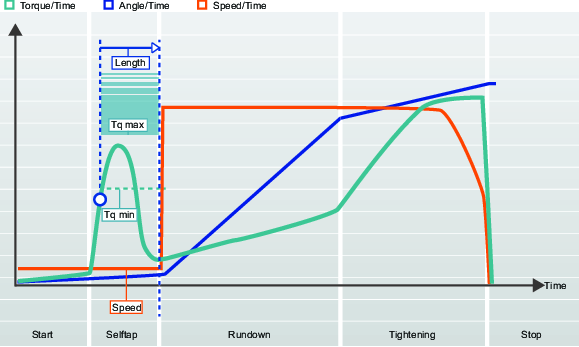
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
セルフタップ | オフ: セルフタップがオフになります。 オン: セルフタップがオンになります。 | オフ |
長さ | セルフタップ時のソケット回転角度を定義します。開始ステップの終了から測定。 | 360° |
Speed (速度) | セルフタップ時の速度を定義します。 | 35 rpm |
最小トルク | セルフタップ下限のトルク値。 | 0 Nm |
最大トルク | セルフタップ上限のトルク値。 | ツール最大トルク |
ランダウントルク制限
スクリューとジョイントとの間の摩擦は異なります。これにより、ジョイント面に到達する前に、ランダウンを実行するのに必要なトルクも同様に変化させる可能性があります。これらの効果は、例えば、穴の干渉、プリベリングトルクまたは潤滑の変動があります。
ナットまたはネジが振動で緩むのを防止するために、プラスチック製インサートのあるロックナットを締め付ける際にランダウントルクを監視することが役立ちます。これには、干渉に対処するためのプリベリングトルクと呼ばれる高トルクが必要です。
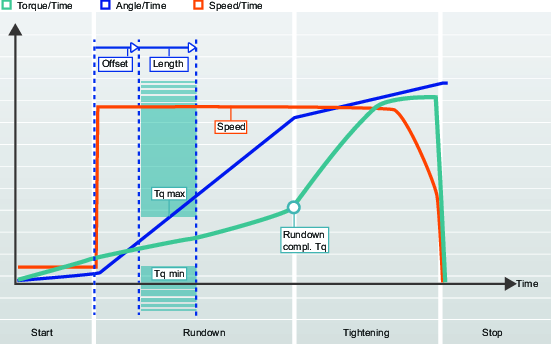
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
ランダウントルク範囲 | オフ: ランダウントルク範囲がオフになります。 オン: ランダウントルク範囲がオンになります。 | オフ |
オフセット | 角度間隔が開始する前の角度オフセット | 0° |
長さ | ランダウントルク範囲を定義する角度 | 360° |
最小トルク | ランダウントルク下限値 | 0 Nm |
最大トルク | ランダウントルク上限値 | 4.75 Nm |
ランダウン角度制限
ランダウン中の回転角度を監視することで、ネジサイズまたは長さが不正なネジなどのエラーを検出することができます。たとえば、スレッドが長すぎる場合、ネジが着座するまでのボルトの回転角が大きくなります。
このオプションは、ステップの目標が角度値の場合に使用できます。
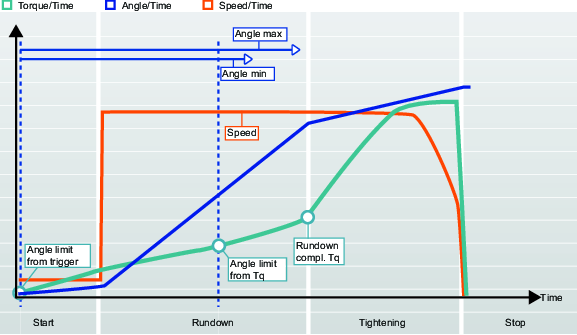
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ランダウン角度範囲 |
| オフ: ランダウン角度制限はオフになっています。 トリガーから:ランダウン角度限界はオンになります。システムは、ツールトリガが押され、角度範囲に違反していると報告があると同時に、システムが締め付け角の監視を始めます。 トルクから:ランダウン角度限界はオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 | オフ |
ランダウン角度監視トルク | ランダウン角度監視トルク = トルクから | ランダウン角度制限が設定されている場所からのトルク値。 | 2.50 Nm |
最小角度 | ランダウン角度制限 = オン | 開始点からの低角度範囲の角度値 | 100° |
最大角度 | ランダウン角度制限 = オン | 開始点からの高角度範囲の角度値 | 1000° |
最短時間 | ランダウン角度制限 = オン | ステップの最短時間。 | 10 ms |
最長時間 | ランダウン角度制限 = オン | ステップの最長時間。 | 5000 ms |
ポストビュートルク
一部のジョイントでは、完全なランダウン前にトルクピークがあります。ポストビュートルクにより、2 つの指定角度間隔でトルク値を監視することができます。この間隔の開始は、完全なランダウン前の角度として定義され、その後、指定の角度間隔に対してトルクが監視されます。
したがって、ポストビュートルクは、最大および最小の限界を互いに独立して設けることができることと、ランダウン段階の結果を良好に管理するよう長さを異ならせることができることを除き、ランダウントルク範囲と同様です。
ランダウンポストビュートルクの監視はオプションで、スイッチ  で制御されます。
で制御されます。
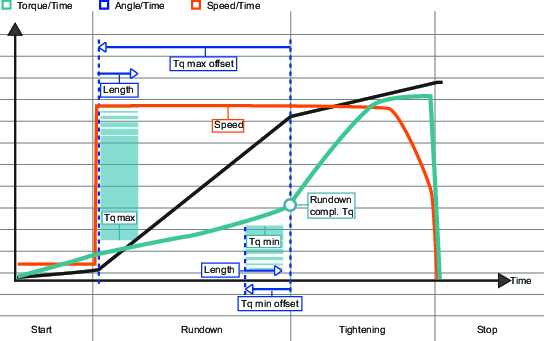
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ポストビュートルク |
| ポストビュートルクはショートカットメニューから選択します。 オフ: ポストビュートルクがオフになります。 オン: ポストビュートルクがオンになります。 | オフ |
最小トルク | ポストビュートルク = オン | ポストビュートルク下限のトルク値 | 4 Nm |
最小トルクオフセット | ポストビュートルク = オン | ポストビュートルク最小間隔が始まる前の角度オフセット。 | 720° |
最小トルク長さ | ポストビュートルク = オン | ポストビュートルク最小セクションを定義する角度長さ | 90° |
最大トルク | ポストビュートルク = オン | ポストビュートルク上限のトルク値。 |
|
最大トルクオフセット | ポストビュートルク = オン | ポストビュートルク最大間隔が始まる前の角度オフセット。 | 360° |
最大トルク長さ | ポストビュートルク = オン | ポストビュートルク最大セクションを定義する角度長さ | 90° |
補正値 | ポストビュートルク = オン | 補正値はショートカットメニューから選択します。 オフ: Peak torque (ピークトルク) オン: 平均トルク |
ランダウンパラメータ
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
セルフタップ |
| セルフタップはスイッチで有効にします オフ: セルフタップがオフになります。 オン: セルフタップがオンになります。 | オフ |
長さ | セルフタップ = オン | セルフタップ時のソケット回転角度を定義します。開始ステップの終了から測定。 | 360° |
Speed (速度) | セルフタップ = オン | セルフタップ時の速度を定義します。 |
|
最小トルク | セルフタップ = オン | セルフタップ下限のトルク値。 | 0 Nm |
最大トルク | セルフタップ = オン | セルフタップ上限のトルク値。 | ツール最大トルク |
ランダウントルク範囲 |
| ランダウントルク範囲はスイッチで有効にします オフ: ランダウントルク範囲がオフになります。 オン: ランダウントルク範囲がオンになります。 | オフ |
オフセット | ランダウントルク範囲 = オン | 角度間隔が開始する前の角度オフセット | 0° |
長さ | ランダウントルク範囲 = オン | ランダウントルク範囲を定義する角度 | 360° |
最小トルク | ランダウントルク範囲 = オン | ランダウントルク下限値 | 0 Nm |
最大トルク | ランダウントルク範囲 = オン | ランダウントルク上限値 | 目標トルクの割合 |
ランダウン角度範囲 |
| ランダウン角度範囲はショートカットメニューから選択します。 オフ: ランダウン角度制限がオフになります。 トリガーから:ランダウン角度制限がオンになります。システムは、ツールトリガが押され、角度範囲に違反していると報告があると同時に、システムが締め付け角の監視を始めます。 トルクから:ランダウン角度制限がオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 | オフ |
ランダウン角度監視トルク | ランダウン角度監視トルク = トルクから | ランダウン角度制限が設定されている場所からのトルク値 |
|
最小角度 | ランダウン角度制限 = オン | 開始点からの低角度範囲の角度値 | 100° |
最大角度 | ランダウン角度制限 = オン | 開始点からの高角度範囲の角度値 | 1000° |
最短時間 | ランダウン角度制限 = オン | ステップの最短時間 | 10 ms |
最長時間 | ランダウン角度制限 = オン | ステップの最長時間 | 5000 ms |
ポストビュートルク |
| ポストビュートルクはスイッチで有効にします オフ: ポストビュートルクがオフになります。 オン: ポストビュートルクがオンになります。 | オフ |
最小トルク | ポストビュートルク = オン | ポストビュートルク下限のトルク値。 |
|
最小トルクオフセット | ポストビュートルク = オン | ポストビュートルク最小間隔が始まる前の角度オフセット。 | 720° |
最小トルク長さ | ポストビュートルク = オン | ポストビュートルク最小セクションを定義する角度長さ | 90° |
最大トルク | ポストビュートルク = オン | ポストビュートルク上限のトルク値。 |
|
最大トルクオフセット | ポストビュートルク = オン | ポストビュートルク最大間隔が始まる前の角度オフセット。 | 360° |
最大トルク長さ | ポストビュートルク = オン | ポストビュートルク最大セクションを定義する角度長さ | 90° |
補正値 | ポストビュートルク = オン | 補正値はショートカットメニューから選択します。 | |
ランダウン完了トルク < 0 |
| スナグに達してランダウンが完了した際のトルク値を定義します。これでプログラムはネジの締め付けに進むことができます。ランダウン完了は、マルチステップ戦略の最初のトルクまたは、TurboTight 戦略の目標トルク未満でなければなりません。 | 0° |
時間監視
時間監視は、ほとんどの締め付け戦略に使用できますが、多少異なります。
時間監視は、回転戦略には使用できません。
時間監視は、ランダウン段階に使用できます。
時間監視は、締め付け段階の最終締め付けステップに使用できます。
時間監視は、角度監視と一緒に使用されます。角度監視が有効であるか、最終目標が角度値である場合、時間監視が使用できます。
いずれかの段階で時間制限に違反した場合、締め付けは終了します。詳細なNOK理由の結果は、それに応じて設定されます。
本セクション内
詳細な NOK 理由
|
NOK 理由 |
説明 |
|---|---|
|
ランダウン時間高 |
有効化からランダウン完了までの測定時間が、時間の最大限度を超える場合。 |
|
ランダウン時間低 |
有効化からランダウン完了までの測定時間が、時間の最小限度を下回る場合。 |
|
最終締め付け時間高 |
有効化から締め付け目標に達するまでの測定時間が、時間の最大限度を超える場合。 |
|
最終締め付け時間低 |
有効化から締め付け目標に達するまでの測定時間が、時間の最小限度を下回る場合。 |
停止段階
ソケットを離すことができるよう停止段階で締め付けを終了します。
ソフトストップは人間工学的に締付け停止を行います。不快な停止のように感じられることが知られているため、50~300ミリ秒の時間間隔でツールを停止しないことが望まれます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ソフトストップ | ソフトストップのオンとオフを切り替えます。 オフ: ソフトストップを使用しません。 オン: ソフトストップが有効です。目標トルクに達すると、ツール速度はすぐに 75% まで低下します。その後、速度は最長 40 ミリ秒でゼロまで低下します。 | オフ |
ネジの緩め
緩めパラメータを設定すると、特定の締め付けプログラムの緩め動作を制御できます。どのツールを使うかに関係なく、ネジスレッドが壊れないように、必要に応じてネジを確実に緩めるように緩め速度とトルクを指定します。
ランアップトルクに達すれば、緩めは OK とみなされます。ネジ長の変化に応じて、システムは、ネジがいつ完全にランアップされたかは判断できません。オペレータは、終了したとみなされるまで、緩めを続行する必要があります。
緩めは、通常の緩めと TurboLoosening に分けられます。選択は、ツール容量と選択されている締め付け戦略に基づいて自動的に行われます。TurboTight は大幅に高い目標トルクを実現できるので、通常の緩め戦略では不十分です。TurboLoosening はパルス戦略を使用し、ツールでサポートされている場合は自動的に選択されます。
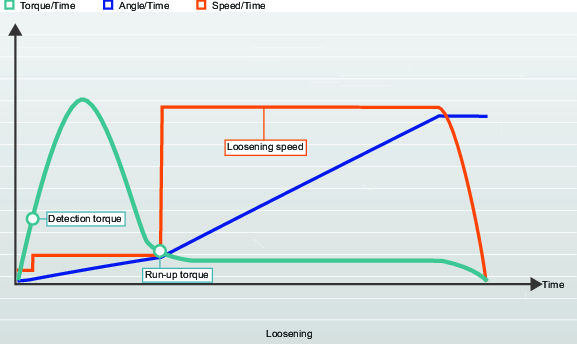
パラメーター名 | 説明 |
|---|---|
開始 | 低速で作動します。測定されるトルクが検出トルクを下回る場合、ランアップステップに進みます。 |
緩め | 通常の緩めの場合: 測定されるトルクがランアップトルクを下回るまで低速で作動してから、ランアップステップに進みます。 Turboloosening の場合: 測定されるトルクがランアップトルクを下回るまで必要な回数だけパルスを使用してネジを緩めてから、ランアップステップに進みます。 |
ランアップ | 必要な時間、緩め速度でツールを作動します。 |
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
緩めが有効 | ラジオボタンで選択されます。 オフ: 緩めが無効になります。 オン: 緩めが有効になり、追加パラメータが構成できます。 | On(オン) |
検出トルク | ラジオボタンで選択されます。 自動:値はツールタイプとツール容量に応じて設定されます。 オン: 値は手動で設定されます。 | 7% ToolMaxTorque |
検出トルク | 緩め操作を開始して緩めの結果をもたらすために必要な最小トルク。 | 3.5 Nm |
ランアップトルク | ラジオボタンで選択されます。 自動:値はツールタイプとツール容量に応じて設定されます。 オン: 値は手動で設定されます。 | |
ランアップトルク | トルクがランアップトルクを下回ると、緩みは[OK]とみなされます。 ネジ長の変化に応じて、システムは、ネジがいつ完全にランアップされたかは判断できません。オペレータがこれを決定しなければなりません。 | 3.5% ToolMaxTorque |
ステージパラメーターの説明
目標トルク制限
ターゲットトルク制限値を設定すると、最終トルクが指定トルク範囲内にならない場合に締め付けを破棄することができます。設定したトルクが高すぎると、降伏点を通過した結果として、ボルトが変形・破損したり、ねじがつぶれることがあります。トルクが不十分であると、ジョイントの設計力に耐える十分なクランプ力にならないことがあります。
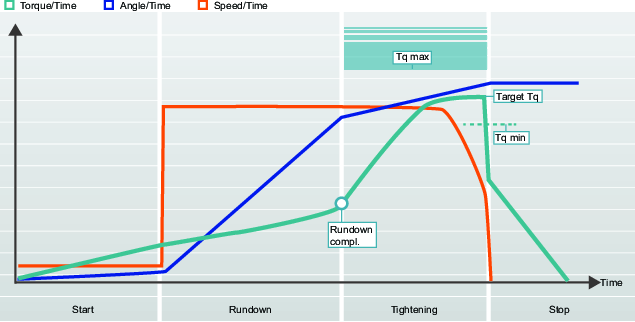
目標角度制限
ターゲット角度限度が設定されていると、締め付け時にナットが必要角度回転されているかを監視できます。
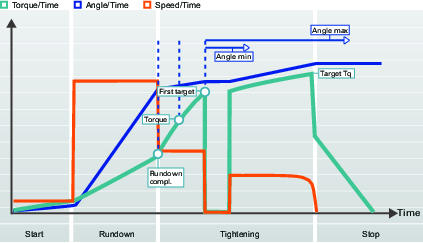
トルク補正
グラフィック表示は、構成設定とパラメーター値の解釈を説明する文書で使用します。グラフは、コントローラまたは ToolsTalk 2 の GUI では使用されません。
トルク補正を使うと、ジョイントにかかる実際のクランプ力がより良好に求められ、ジョイントにかかるクランプ力のばらつきを低減することができます。
トルク補正点は、ランダウン完了から指定角度を再度参照し、ランダウン時に用いるトルクの値を計算することで設定されます。次に、ターゲットトルクにトルク補償点で計算したトルク値を追加して、ボルト内のプレロード作成時に補償されます。
パラメータ | 説明 |
|---|---|
トルク補正 | ランダウン段階で使用するトルの目標トルクを調整できるようにします。 オフ: 補正が行われていません。 オン: トルク補正点を手動で設定します。 |
A | 開始段階 |
B | ランダウン段階 |
C | 締め付け段階の最初のステップ |
D | 締め付け段階の最後のステップ |
E | 停止段階 |
F | 最終の締め付け目標トルク |
G | 対時間トルクの曲線 |
H | トルク補正値(トルク) |
J | トルク補正リファレンス点(角度) |
K | ランダウン完了目標トルク |
L | 最初の締め付けターゲットトルク |
オプションのトルク補正パラメータは、締め付け段階の最初の締め付けステップにありますが、測定はランダウン段階で行われます。これが有効になっている場合、次のようになります。
ランダウン完了より下の定義済み角度でトルク値が測定されます。
測定値は、トルク補正値として定義されます。
締め付けは、最初の締め付けステップに続きます。
例えば、ターゲットトルクまたは角度監視トルクなど、以下の全てのトルク値は、トルク補正値の追加で補正されます 。
残留トルクの相関係数
[残留] トルクの相関係数の用語は、較正と同様であり、電気ツールで測定する動的トルクと制御ツールで測定する残留トルク間で調整します。
残留トルク相関係数は、TurboTight戦略とTensoPulse締め付け戦略を実行するすべてのツールで使用できます。コントローラーがサポートしているバッテリーパルスツールでも使用できます。
100 とは異なる残留トルクの相関係数を用いる場合、報告される最終トルクは、ツール変換器で測定する動的トルクではありません。
動的トルク測定では、常にトルクを測定する内部トルク変換器を使用します。目標トルクに達すると、ツールが停止し、その結果は評価され、報告されます。変換器で測定された最終トルクは、ジョイントの状態、ツール速度、ギアおよびソケットの影響を受けます。
締め付けが完了した後に残留トルクを測定します。これは、より高いレベルに締め付けを継続するか、再起動するのに必要なトルクです。残留トルクは、ジョイント内のクランプ力を決定します。
動的トルク測定は、非常に反復的ですが、ツールタイプとツール速度間で異なる場合があります。 | ハンドヘルド較正済みトルクレンチにより、残留トルクを高精度で測定しますが、ジョイントの緩み、トルク減衰、摩擦やオペレーターの技術により大きな変動があります。 |
残留トルクの相関係数は、動的トルクと残留トルク間の補正です。この係数は、実験によって決定する必要があります。選択した締め付けプログラムが数回行われ、動的トルクが記録されます。締め付けは手動でも測定され、残留トルクを決定します。

残留トルクの相関係数は、動的トルクにより残留トルクを除することで計算できます。残留トルクの相関係数は、パーセントで示され、デフォルトでは 100% です。つまり、報告される動的トルク値は変更されていません。
パラメーター | 機能 |
|---|---|
ターゲットトルク | TurboTight 戦略を使用した締め付けに対するツールの目標トルクが設定されます。 |
最終動的トルク | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 動的トルクは、基準変換器によって測定します。 |
残留トルク | 必要なクランプ力を確実に得るために必要な残留トルクです。 |
残留トルクの相関係数 | 残留トルクと動的トルクの間の補正係数 |
トルク調整使用方法の例:
TurboTight 戦略を選択します。ジョイントは、必要なクランプ力に達するように、12 Nm まで締め付けなければなりません。以下のセットアップを行います:
設定例 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた必要な目標トルク |
残留トルクの相関係数 | 100 | 残留トルクと動的トルクの間の補正係数 |
複数の締め付けを行います。締め付け毎に、較正済みトルクレンチでジョイントを確認します。平均値を算出し、以下の結果が得られました。
初期パラメーターと結果 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた目標トルク |
Final torque (最終トルク) | 12 Nm | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 12 Nm | ツール変換器からの未補正測定トルク。 |
残留トルク | 10 Nm | 較正済みトルクレンチまたは他のテストツールで測定した残留トルク。 |
残留トルクの相関係数 | 100 % | 残留トルクと動的トルクの間の補正係数 |
テストにより、必要なクランプ力を発生させるには残留トルクが低すぎることが示されています。残留トルクの相関係数は、0.83(83%)と計算されます。調整係数の調整が行われ、次の結果が得られます。
最終パラメーターと結果 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた目標トルク |
Final torque (最終トルク) | 12 Nm | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 14.5 Nm | ツール変換器からの未補正測定トルク。 |
残留トルク | 12 Nm | 必要なクランプ力を確実に得るために必要な残留トルクです。 |
残留トルクの相関係数 | 83 % | 残留トルクと動的トルクの間の補正係数 |
これは、差異を補正してジョイントの必要目標に達するのに、指定の目標よりも若干多めに締め付ける必要があることを意味します。
相関を、生産で使用するのと同じツールタイプおよびパラメーター較正で行うことが重要です。
早期トルク損失検出
締め付けプログラムは、ネジヘッドがスナグに達し、トルクが急速に増加すると、ランダウンから締め付けに移行します。この時点はランダウントルクと呼ばれ、設定されたトルク値に達することで定義されます。
正しく締め付けを行うため、トルクが増加することが前提とされています。トルクが減少する場合、次のことが仮定される場合があります。
ツールトリガを押している間にソケットがネジヘッドから滑る。ツールがトルクの急速な減少を検出し、その速度設定に従って回転を続けています。
ツールトリガを押している間にネジが破損。ツールがトルクの急速な減少を検出し、その速度設定に従って回転を続けています。
この段階でトルクの低下が検出された場合は、次の手順を実行します。
減少が検出される前の最終トルク値を保存します。
検出タイマーを開始します。
締め付けを継続し、トルクを測定します。
トルクが増加し、保存されたレベルまで達し、設定された時間内で締め付けプログラムに従って増加を続けると、通常通り締め付けを継続します。
設定された時間の終わりまでトルクの減少が続く場合、締め付けは NOK とみなされます。
ツールでトルク喪失が検出されると、ツールトリガが押されている間は回転を続けます。オペレーターがトリガを解除すると締め付けは終了し、結果は「詳細な NOK 理由 = 早期のトルク喪失検出」で報告されます。
締め付けプログラムの作成
リストが空の場合、締め付けプログラムは作成されていません。新しい締め付けプログラムを作成して開始します。
プラント構造
エリアでコントローラを選択します。締め付けプログラム
に移動します。締め付けプログラムの概要に、使用可能な締め付けプログラムのリストが表示されます。
追加を選択します。新しい締め付けプログラムの作成ウィンドウが表示されます。
新しい締め付けプログラムを作成するには、下の表で説明されているパラメーターを入力します。
追加を選択します。ウィンドウが閉じ、ワークスペースに追加する必要がある構成メニューが表示されます。
パラメータ | 説明 |
|---|---|
名前 | パラメータ入力フィールドで、締め付けプログラムに名前をつけます。 |
インデックス (締め付けプログラム番号) | 最初の空きインデックス番号がデフォルトで指定されますが、他の任意の空き番号を締め付けプログラムに割り当てることができます。インデックス番号を後で変更することはできません。パラメータ入力フィールドにオプションのインデックス番号を入力します。 |
戦略 | ショートカットメニューから締め付け戦略を選択します。 |
コントロール戦略 | ショートカットメニューから選択します。特定の戦略のみに適用できます。 |
ターゲット | 締め付けでの最終目標を選択します。 ショートカットメニューから選択します。 |
ターゲット | 締め付けステップの目標値をトルクや度で入力します |
利用可能な戦略は、IAM モジュールとコントローラソフトウェアライセンスによって異なります。
締め付けプログラム構成 - 一般パラメータ
締め付けプログラム構成メニューには、直接は締め付けプログラムの一部ではない一般パラメータが含まれます。これを以下に説明します。
締め付けプログラムのすべてのパラメータは、ステップ構成メニューに入力され、ここで編集されます。
プラント構造
ワークスペース でコントローラを選択します。[締め付けプログラム]
タブを選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
表示および/または構成するには、締め付けプログラムの1つの名前をダブルクリックします。
ステップ構成メニューには 2 つのタブがあります。締め付けおよび緩め。
メニューコントロール | 説明 |
|---|---|
 | プロパティメニューを折りたたみます。これで画面を有効に使用できます。 |
 | プロパティメニューを展開します。これですべての構成にアクセスできます。 |
パラメータ | 説明 | デフォルト値 |
|---|---|---|
名前 | 締め付けプログラムには一意の名前を付けることを推奨します。 締め付けが作成され、固定されると、インデックス番号が作成されます。プログラムが作成されると、一番小さい空き番号が割り当てられます。 | プログラム |
説明 | オプションの締め付けプログラムの説明。 | |
戦略 | 使用できるオプションは、コントローラのソフトウェアとライセンスのバージョンによって異なります。 |
|
向き | スレッド方向では、スピンドルの締め付け方向を時計回り (CW) にするか反時計回り (CCW) にするかを定義します。スピンドルの回転は、スリーステップ戦略で使用する緩めステップ時を除き、常にこの方向になります。 | CW |
リヒット検出 | 早期:既に締め付けたねじ / ボルトが検出されると直ちに締め付けを終了します。締め付けは NG とみなされます。ソフトスタートが有効になっていることが必要です。 完了:すでに締め付けたネジ/ボルトが検出されても、すべての締め付け段階が実行されるまで締め付けは終了しません。締め付けは NG とみなされます。ソフトスタートを使用しない場合にリヒット検出を行うには、リヒット検出完了オプションを選択する必要があります。リヒット検出完了では、すべての締め付け段階が実行されるまで締め付けを終了しません。速度がランダウン速度の半分に達しなかった場合、その締め付けはリヒットと見なされ、リヒットエラーが表示されます。 オフ: リヒット検出は実施されません。 コンビネーションソフトスタート = オフとリヒット = 早期は許可されません | 早期 |
電流監視 | 電流監視は、締め付けトルクを監視するための高度なセキュリティを提供します。これはツールのトルクセンサーを補完するものです。 オン: 最終目標トルクで、回転子電流が測定され、トルク値に変換されます。計算したトルクが測定トルクの 10% 以内であれば、締め付けは、OK とみなされます。 オフ: 現在の監視が無効になり、ツールトルクは、トルクセンサによって測定されます。 | |
真の角度補正 | 特定のツールでは、締め付け時のツールの回転を検出、測定することができます。ツールが締め付け中に回転する場合、角度測定が壊れている可能性があります。ツールの動きが大きすぎる場合、締め付けの不具合につながる可能性があります。指定制限値内での変動について、コントローラは、これらの回転を補正し、正しい締め付けを行うことができます。 これは、仮想ステーションごとに利用可能な追加のライセンス機能です。 | オフ |
負の角度制限 | [真の角度補正] が [オン] に設定されている場合にアクティブになります。 ツールの最大の負の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。これは数値角度値で表現されます。 | 30 度 |
正の角度制限 | [真の角度補正] が [オン] に設定されている場合にアクティブになります。 ツールの最大の正の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。これは数値角度値で表現されます。 | 30 度 |
アッタチメントの調整有効 | アタッチメント調整では、ツールでフロントアタッチメントを補正することができます。補正は、各締め付けプログラムに対して行うことができます。 オペレーターは、アタッチメントをホットスワップしてから、その特定のアタッチメントに対して調整した締め付けプログラムを選択することができます。 アタッチメントの調整は、ST レンチを除くすべての従来の戦略で利用可能です。 アタッチメントの調整には、別の箇所に説明されている特別なステップが必要です。 | いいえ |
確認
締め付けプログラムの構成中、入力された値はツール機能値と比較され、パラメータが選択された限度範囲外になることを防ぎます。多数の異なるツールが使用される場合、ユーザー定義の最大値が便利です。
ツール値に照らして検証がオフに設定されている場合、これらの値は無視され、最大ツール容量に従って検証が行われます。
ツール値に照らして検証 が オン に設定されている場合、接続されているすべてのツールから締め付けプログラムを検証するツールを選択できます。検証するツールはクライアントごとに行われるため、オペレータはさまざまなクライアントのさまざまなツールに対して検証を行うことができます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ツール | 手動 | |
最大トルク | 検証で使用される上限。任意の値を選択できますが、実際のツールの値を使用することをお勧めします。これは数値角度値で表現されます。 | |
最大速度 | 検証で使用される上限。任意の値を選択できますが、実際のツールの値を使用することをお勧めします。これは、数値のrpm 値で表されます。 |
コントローラには、さまざまな機能を備えたツールなどを使用する複数の仮想ステーションがある場合があります。ユーザー定義値は、各締め付けプログラムに対して選択できます。
履歴
締め付けプログラム履歴では、最後の 10 件のユーザー変更を保存します。保存されているいずれかのバージョンを選択すると、パラメータの詳細が表示されます。置換をクリックして選択したバージョンを有効にします。選択した締め付けプログラムの保存されたすべてのパラメータ履歴の詳細を印刷するには、履歴> レポート > 印刷を選択します。
印刷
印刷ボタンを選択すると、現在の締め付けプログラム構成とパラメータ値すべてを表示するショートカットウィンドウを開きます。このウィンドウは、プリンタに送信できます。
保存されている締め付けプログラムを印刷するには、履歴でプログラムを選択し、レポートタブを選択します。
締め付けプログラムの検証
ToolsTalk 2 アプリケーションは、入力されたパラメータを、パラメータ規則とオプションのツール機能と自動的に比較します。検証でエラーが検出された場合は、エラーの説明とともにエラーが報告されます。
新しいプログラムが作成されると、一部のパラメータはデフォルト値を持ちます。締め付け規則に違反してエラーインジケーターが表示されることがあります。
エラーインジケーターの記号。
エラーインジケーターの場所は、エラーのあるパラメータを示します。エラーインジケーター上にポインタを置くと、ポップアップフィールドでどの規則に違反しているかが説明されます。エラーが発生した場合は、パラメータを変更します。パラメータが修正されると、エラーインジケーターは表示されなくなります。
本セクション内
締め付けプログラム履歴
ToolsTalk 2は、締め付けプログラムに加えられてコントローラにプッシュされた最後の10個の変更を追跡します。
すべての元の締め付けプログラムパラメータ設定と変更が示された印刷レポート。
すべての現在の締め付けプログラムパラメータ設定が示された印刷レポート。
締め付けプログラムの改訂履歴のリスト。希望するバージョンを選択して、置換コマンドボタンをクリックして、以前の締め付けプログラムパラメータ設定にすばやく変更することができます。
改正履歴は、プッシュコマンドが実行され、コントローラが ToolsTalk 2 から更新されると作成されます。
プラント構造ワークスペース
でコントローラを選択します。 締め付けプログラムアイコン
を選択します。締め付けプログラムをダブルクリックして、締め付けプログラム構成ワークスペースを開きます。
履歴コマンドボタンを選択します。
締め付けプログラム履歴の管理ポップアップウィンドウが開きます。
以前の締め付けプログラムの表示
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
行を 1 つクリックして改訂を選択します。
ウィンドウの右側に構成パラメータの詳細のリストが表示されます。
2 つの締め付けプログラムの改訂を比較できます。最初の締め付けプログラムを選択してから、キーボードの Ctrl ボタンを押したままで 2 番目の締め付けプログラムを選択します。続いて右側のウィンドウに両方の設定が表示されます。すべてのパラメータを表示することも、変更のみ表示 ボックスを選択して異なるパラメータのみを表示することもできます。
終了したら、閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
保管されている2つの締め付けプログラムの比較
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
保存されている締め付けプログラムから 2 つの締め付けプログラムを選択します。
選択した 2 つの締め付けプログラム間の比較が、右の列に表示されます。
閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
以前の締め付けプログラムへの切り替え
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
行を 1 つクリックして改訂を選択します。
ウィンドウの右側に構成パラメータの詳細のリストが表示されます。
置換コマンドボタンを選択します。
閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
締め付けプログラム履歴レポートの印刷
レポートタブを選択します。
印刷コマンドボタンを選択します。
印刷ダイアログウィンドウが印刷のために開きます。
終了したら、閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
印刷されたレポートには、すべての構成とパラメータ値の完全なリストが含まれます。これに加えて、すべての改正と各改正で行われた変更が一覧表示されます。これで締め付けプログラムに行われた完全な履歴が示されます。いつ変更が行われたか、または ToolsTalk 2 からいつプッシュが行われたかをタイムスタンプで表示します。
関連情報
アッタチメントの調整
アタッチメント調整では、ツールでフロントアタッチメントを補正することができます。補正は、各締め付けプログラムに対して行うことができます。
オペレーターは、アタッチメントをホットスワップしてから、その特定のアタッチメントに対して調整した締め付けプログラムを選択することができます。
アタッチメントの調整は、ST レンチを除くすべての従来の戦略で利用可能です。
プラント構造ワークスペース
でコントローラを選択します。締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
プログラムを表示または構成するには、いずれかの締め付けプログラムの名前をダブルクリックします。
プロパティメニューでアッタチメントの調整有効にはいまたはいいえを選択します。
この機能を無効にすると、残りのパラメータは表示されなくなります。
ステップ構成メニューに移動し、開始段階に進みます。
アッタチメントの調整の使用にはいまたはいいえを選択します。
この機能をはいにすると、調整係数が表示され、編集できます。
調整パラメータは次になります。
アタッチメントギア比
効率の調整
アッタチメントの調整 | 説明 | デフォルト |
|---|---|---|
アタッチメントギア比 | アタッチメントギア比は、角度を補正するために必要です。 最小:0.5 最大:100 ソケット回転速度 = ツール速度/ギア比 | 1.0 |
効率の調整 | 効率の調整と組み合わせたアタッチメントのギア比は、トルクを補正するために必要です。 最小:0.5 最大:1.0 例えば、0.9 は 10% の効率の損失を意味します。 | 1.0 |
注意: アタッチメントギア比はツール速度に影響し、ひいては安全限度に影響する場合があります。
締め付けプログラムのインポート
以前にエクスポートされた締め付けプログラムは、ToolsTalk 2 設備にインポートできます。
締め付けプログラムのエクスポートとインポートには、締め付けプログラムのコピーと貼り付けと同じルールが適用されます。締め付けプログラムのコピーと貼り付け を参照してください。
プラント構造
エリアでコントローラを選択します。[締め付けプログラム]タブに移動します。
締め付けプログラムの概要には、使用可能な締め付けプログラムの一覧が表示されます。
追加を選択します。[新規締付けプログラムの作成]ダイアログで、[インポート]タブを選択します。
ファイルを開く を選択し、目的のインポートファイルを見つけます。ファイルは json の形式である必要があります。追加を選択します。
インポートされた締め付けプログラムは、締め付けプログラムワークスペースのリストに追加されます。
締め付けプログラムの削除
削除する締め付けプログラムごとに対応するチェックボックスをオンにします。
管理を選択し、続いて削除を選択します。
締め付けプログラムの概要のリストが更新されます。
締め付けプログラムのコピーと貼り付け
締付プログラムはコピーして貼り付けることができます。ハンドヘルド コントローラー (PF8、PF6000、STRW、PFXC、IXB、および ToolsControl) には次のルールが適用されます:
コピーと貼り付けは同じコントローラーで実行できます。
お互いに異なるハンドヘルド コントローラーの種類やバージョン間でコピーと貼り付けが可能です。
古いコントローラー バージョンから新しいコントローラー バージョンにコピーと貼り付けすることはできますが、新しいコントローラー バージョンから古いコントローラー バージョンにコピーと貼り付けすることはできません。
お互いに異なるコントローラータイプ間でコピーと貼り付けを行った場合に発生する可能性のある検証エラーは修正する必要があります。
締め付けプログラムをコピーしたものには、付属する、または関連するプログラムのリンクなど、すべてのものが常に含まれます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
締め付けプログラムを選択します。作業スペース領域には利用可能なプログラムがすべて表示されます。

1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
グローバル締め付けプログラム
締め付けプログラムはローカルかグローバルのいずれかです。締め付けプログラムがグローバルの場合、締め付けプログラムのリストのライブラリのリンクの列にはいが示されます。
何らかの文書や古いGUIバージョンで、締め付けプログラム と言う言葉は、Psetで代用されている場合があります。
ローカル締め付けプログラムは単一のコントローラになります。
締め付けプログラムのリスト表示
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
ローカル締め付けプログラムは締め付けプログラム タブでのみ編集できます。
ローカル締め付けプログラムは、締め付けプログラムライブラリ  には表示されません。
には表示されません。
グローバル締め付けプログラムは、締め付けプログラムに登録されている複数のコントローラに有効です。グローバル締め付けプログラムがコントローラに配布されている場合で、CATLA などの従来の戦略を使用した場合、コントローラはプログラムをグレー表示して変更できないようにします。マルチステップ戦略を使用する場合、プログラムは引き続き編集できますが、ToolsTalk 2で変更が行われると上書きされます。グローバル締め付けプログラムは締め付けプログラムライブラリあります。
ライブラリへのアクセス
左側のメニューバーでライブラリ
を選択します。 上部のメニューバーで締め付けプログラムライブラリ
を選択します。 締め付けプログラムライブラリに、グローバル締め付けプログラムのリストが表示されます。
コントローラがグローバル締め付けプログラムに登録されている場合、これは締め付けプログラム に表示されますが、編集はできません。
グローバル締め付けプログラムは締め付けプログラムライブラリ のみから編集できます。
ローカル締め付けプログラムをグローバル締め付けプログラムに変換する
ローカル締付けプログラムのリストで、一番左側の列にあるチェック・ボックスを選択し
 、 変換プログラムを選んでください。
、 変換プログラムを選んでください。管理 を選択します。
ライブラリに追加を選択します。
ダイアログウィンドウで[作成]を選択して、ローカル締め付けプログラムをライブラリにコピーします。この操作により、ウィンドウも閉じます。
一番左の列のチェックボックスをクリアーしてください。
選択された締め付けプログラムには、ライブラリのリンク列にはいが示されます。
ToolsTalk 2は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。この操作は、締め付けプログラムライブラリのグローバル締め付けプログラムの配信で定義されています。
グローバル締め付けプログラムをローカル締め付けプログラムに変換する
ローカル締付けプログラムのリストで、一番左側の列にあるチェック・ボックスを選択し
、 変換プログラムを選んでください。管理 を選択します。
リンク解除を選択します。
一番左の列のチェックボックスをクリアーしてください。
選択された締め付けプログラムのライブラリのリンク列が空になります。
締め付けプログラムの比較
同じ戦略に構成されている場合、2 つの締め付けプログラムをすばやく比較することができます。
締め付けプログラムのリスト表示
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
プログラムリストに表示されている2つの締め付けプログラムの比較
一番左の列で、比較される両方の締め付けプログラムに対応するチェックボックスを選択してください。
管理コマンドボタンを選択して、比較を選択します。
選択した2つの締め付けプログラムが同じ戦略を持っていない場合、比較は許可されません。
ワークスペースに、選択した 2 つの締め付けプログラムのパラメータのリストが表示されます。左上のチェックボックスの違いのみを表示を選択すると、異なるパラメータのみを表示できます。
承認ステータス
ステータス | 説明 |
|---|---|
承認済み | このプログラムは承認されており、コントローラーで使用できます。プログラムは読み取り専用になります。 |
下書き | プログラムは変更中/最適化中。確定後、プログラムは承認のために送信できます。プログラムは編集可能になります。 |
すべてのプログラムは、承認ステータスに関係なく使用できます。承認ステータスは、プログラムの動作機能に影響を及ぼしません。
プログラムが承認ワークフローに入ると、ステータスが必ず設定されます。
[バッチシーケンス]タブの使用
バッチシーケンスタスクは、仮想ステーションのタスク構成または外部入力ソースで選択されます。
締め付け順序は、固定スキームに従うか、オペレーターに任せて自由順序スキームかのいずれかを決定することができます。いずれの場合も、ソケットまたは信号を使用して、コントローラとオペレータの間の通信を行うことができます。
バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
バッチシーケンスは、操作にバッチ/締め付けプログラムの組み合わせが必要な場合の、順序の指定されたバッチのセットです。
プラント構造
でコントローラを選択します。 バッチシーケンス
 に移動します。
に移動します。
列には次の情報が含まれます。
列 | 説明 |
|---|---|
タイトル | 各バッチシーケンス名は、インデックス番号で始まります。それに続く文字は、任意のユーザー定義名に変更することが可能です。 |
説明 | バッチシーケンスの説明。 |
最終変更 | ToolsTalk 2 時間で表されます。 |
最終変更者 | <ユーザー> によって最後に変更された構成データ。 |
コントローラ更新 | コントローラ時間で表します。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ。 |
変更者とコントローラー更新者のフィールドは、ToolsTalk 2インターフェースで作成された登録ToolsTalk 2 ユーザーになります。
コマンド | 説明 |
|---|---|
管理 |
構成を削除すると、構成のリストのインデックス番号に異常が示されます。インデックス番号は変更されません。新しい構成を追加すると、構成に空いているインデックスの最下位が検索されます。 |
追加 | 新しいバッチシーケンスを作成またはインポートします。 |
バッチシーケンス名は、インデックス番号とオプションの文字の組み合わせです。インデックスの位置は変更できません。新しい構成には、一番小さい使用可能なインデックス番号が指定されます。インデックス番号は、タスクの選択プロセスの一部にソース番号と ID 番号を使用する際に重要です。
本セクション内
バッチシーケンスの構成ワークスペース
バッチシーケンスの構成ワークスペースには、次の構成メニューで単一のバッチシーケンスの詳細が示されます。
基本設定: 構成名と説明を使用。
一般設定: 締め付けの流れと順番を制御。
シーケンス構成: 個別の締め付けプログラムからバッチシーケンスを作成。
バッチシーケンスメニューの表示
プラント構造ワークスペース
でコントローラを選択します。メニューバーでバッチシーケンス
を選びます。メニューを表示するバッチシーケンスの名前をダブルクリックします。
バッチシーケンスの構成メニュー
プロパティメニューのオプションは次の通りです:
パラメーター名 | 説明 |
|---|---|
名前 | 既定名バッチシーケンス。これは編集可能です。 |
説明 | バッチシーケンスに対して発行される説明(オプション)。 |
バッチシーケンス完了時にツールをロック | オン: バッチシーケンスが完了するとツールがロックされます。 オフ: バッチシーケンスが完了してもツールはロック解除のままです。 |
自由な順序 | いいえ:シーケンス内のバッチは、インデックス番号順に実行されます。ソケットが指定されている場合、バッチを実施する際に、次のソケットに対してシステムからプロンプトが表示されます。 はい:シーケンス内の締め付けとバッチは、任意の順序で実行できます。オペレーターは、ID 番号として機能するソケットセレクタビットを使用してどのバッチを実行するかをシステムに示す必要があります。 |
NG で増加 | いいえ: 締め付けが失敗 (NG) するとバッチカウンタは増加しません。 はい: 締め付けが失敗 (NG) するとバッチカウンタが増加します。 |
最大連続 NG | 最大連続 NG は、バッチ内での連続失敗締め付けの最大許容回数として定義されます。値に達すると、イベントのNG締め付けが多すぎます(4020)が表示されます。 |
緩め時の減少 | 決して: 緩めが実行されるとき、バッチ・カウンターは減少しません。これは初期設定(デフォルト)値です。 常に: 緩めが実行されるとき、バッチ・カウンターは減少します。 前回の締め付けが OK だった場合: 前回の締め付けがOKであった場合、緩めが実行されるとき、バッチ・カウンターは減少します。 |
シーケンス中止時間 | オン: 選択したバッチシーケンスは、指定した制限時間内に中止されますオンを選択した場合、Abort time (異常終了時間) のフィールドが開きます。 オフ: 選択したバッチシーケンスを中止することは、できません。 |
Abort time (異常終了時間) | 選択したバッチシーケンスを中止することができる秒数。許可されている範囲は 1 秒 ~ 1600 秒です。 |
バッチシーケンスは、次の場合に完了 (そしてツールがロック) します。
すべての締め付けが OK または NG の結果で完了しました。
シーケンスの中止信号でタスクが終了しました。実行されていない締め付けは NG 結果で報告されます。
シーケンス構成メニューでは、異なるバッチが 1 つのバッチシーケンスに組み合わされます。バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
シーケンス構成メニューの各行は単一のバッチを表します。
列 | 説明 |
|---|---|
チェックボックス。 | |
バッチ | バッチのインデックス番号 (シーケンス内の順番)。 |
締め付けプログラム | ドロップダウン・メニュー。このバッチの締め付けプログラムを選択します。 |
バッチサイズ | バッチに含められる締め付け数。 |
ID 番号 | 外部で生成された ID 番号、または ID 番号に変換されるソケットセレクタ位置。
|
関連情報
バッチシーケンスへの新規バッチの追加
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースには、バッチシーケンスのリストが表示されます。シーケンス構成メニューで追加コマンドボタンを選択します。バッチシーケンスの作成方法ウィンドウが開きます。
名前を付けてバッチシーケンスを発行し、[追加]を選択します。
プロパティで関連するパラメーターを選択します。
シーケンス構成でバッチの締め付けプログラムを選択します。
バッチサイズ(バッチに含まれる締め付けの数)を入力します。
オプションの ID 番号を入力します。
新しいバッチシーケンスは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して、バッチ締め付け順序を変更することはできません。
バッチシーケンスとソースのコピーと貼り付け
次をコピーして貼り付けることができます:
バッチシーケンス
ソースバッチとソース締め付け
以下のルールが適用されます:
同じコントローラーで実行できます
同じソフトウェアバージョンを実行する同じタイプのコントローラー間で行うことができます。
バッチ、シーケンスまたはソースをコピーしたものには、付属する、または関連するプログラム、モード、リンクなど、すべてのものが常に含まれます。
例:ソースバッチをコピーしたもの > 貼り付けると、新しいバッチシーケンス、およびプログラムがリンクされた新いソースバッチが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
[バッチシーケンス] または [ソース] を選択します。作業スペース領域には利用可能なプログラムがすべて表示されます。


1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
バッチシーケンスのエクスポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをエクスポートすると、バッチシーケンスに関連付けられているプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]タブ
を選択します。ワークスペースには、現在のすべてのバッチシーケンスのリストが表示されます。エクスポートするバッチシーケンスのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<BatchSequenceName>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
バッチシーケンスのインポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをインポートすると、バッチシーケンスに関連付けられているプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースエリアは、現在のすべてのバッチシーケンスが記載されているリストを表示します。 追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
使用可能なスロットがない場合、バッチシーケンスがリストの一番下に追加され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して順序を変更することはできません。
バッチシーケンスのバッチの削除
バッチシーケンス
で、削除するバッチのチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。選択したバッチがリストから削除されます。
バッチがバッチシーケンスから削除されると、インデックスシーケンスは圧縮されて更新され、ギャップは残りません。削除されたバッチシーケンスのインデックス番号は、作成される次のシーケンスに自動的に割り当てられます。
[構成]タブの操作
スキャナ、スタックライト、ツールは、I/O バスを介してコントローラに接続されるデバイスタイプの一例です。複数のデバイスを I/O バスに接続し、各デバイスタイプに独自の構成パラメータを持たせることができます。操作の前に、構成を仮想ステーションに割り当てることが必要です。
既存の構成の表示
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
を選択します。ワークスペースエリアが、現在のすべての構成のリストを表示します。
ワークスペースリストの行をダブルクリックして、選択した構成の詳細を表示します。
ワークスペースエリアに、選択したデバイスを構成できる構成メニューが表示されます。
構成概要リスト 列
説明
チェックボックス
選択して、管理コマンドボタンリストにアクセスします。
説明
構成の説明
タイトル
コントローラテンプレートの名前を示します。
タイプ
構成セットアップのタイプ。
ライブラリのリンク
構成のライブラリリンクがある場合は、はい と表示されます。
最終変更
ToolsTalk 2 時間で表される最終変更。
変更者
<User> による最終変更
コントローラ更新
コントローラ時間で表される最終変更。
コントローラ更新者
<User> によるコントローラの最終更新
各列の見出しをクリックして、リストを並べ替えることができます。
構成の追加
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。ドロップダウンリストからデバイスのタイプを選択し、[追加]を選択します
プロパティメニューで、構成の名前と説明を入力します。
選択したデバイスの種類に応じて、各構成には独自の入力信号と出力信号のセットがあります。デバイスの各タイプの構成方法は、別途説明しています。
構成のインポート
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ダイアログウィンドウで追加を選択します。
構成の削除
構成
で、削除する構成のチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
選択された構成がリストから削除されます。
構成は、仮想ステーションに割り当てられていない場合にのみ削除できます。
アクセサリコンポーネント
アクセサリーの種類が異なれば、その機能やランプ、ボタン、サイレン、スイッチの種類も異なります。
コンポーネント名 | 説明 |
|---|---|
スタックライトランプ | 次の機能のいずれかを持つことができる出力信号に関連付けられているスタックライトコンポーネント:
|
ランプ | ライトの出力信号に関連付けられているコンポーネント。 ライトがオンになる時間は定義できます。 ライトは点灯または点滅に設定することができます。 |
ボタン | ライトの出力信号とプッシュボタンの入力信号に関連付けられているコンポーネント |
キースイッチ | 入力信号に関連付けられているコンポーネント。取り外し可能なキーのコンポーネント。挿入して、スイッチを 1 方向に回すことができます。キーを回すと入力が有効になります。 |
2 方向キースイッチ | 2 つの入力信号に関連付けられているコンポーネント。取り外し可能なキーのコンポーネント。挿入して、スイッチを 2 方向に回すことができます。キーを回すと入力が有効になります。 |
1 方向スイッチ | 入力信号に関連付けられているコンポーネント。回転スイッチのコンポーネント。挿入して、スイッチを 1 方向に回すことができます。スイッチを回すと入力が有効になります。 |
2 方向スイッチ | 2 つの入力信号に関連付けられているコンポーネント。回転スイッチのコンポーネント。挿入して、スイッチを 2 方向に回すことができます。スイッチを回すと入力が有効になります。 |
ブザー | 出力信号に関連付けられているコンポーネント。出力信号が有効になると、ブザーの音が鳴ります。 ブザーがオンになる時間は定義できます。 ブザー音は連続または断続に設定することができます。 |
デジタル入力 | デジタル入力信号に関連付けられているコンポーネントまたは端子。 |
デジタル出力 | デジタル出力信号に関連付けられているコンポーネントまたは端子。 |
オペレーターパネルの表示 | オペレーターパネルの表示は 2 桁のディスプレイで、次を表示します。
|
オペレーターパネルのソフトセレクタ | 2 方向の回転スイッチには 2 桁のディスプレイもあります。ディスプレイではバッチシーケンス内の現在のバッチを示します。
ディスプレイではバッチシーケンス内の現在のバッチを示します。 |
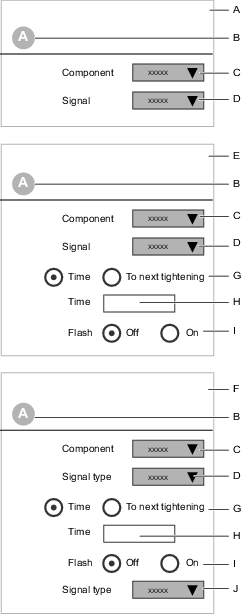
A | コンポーネントタイプ (入力) | B | コンポーネント ID |
C | コンポーネントタイプ選択 | D | ドロップダウンリストからの信号選択 |
E | コンポーネントタイプ (出力) | F | コンポーネントタイプ (入出力) |
G | 出力信号期間選択 | H | 出力信号持続期間 |
I | 出力信号の点滅選択のオンまたはオフスイッチ | J | ドロップダウンリストからの入力信号の選択 |
ドロップダウンメニューで選択できる信号は、選択したコンポーネントによって異なります。
出力信号の構成
出力信号はランプ、スタックライト、サイレン、ブザー、端子コネクタにマッピングできます。信号は、プログラム可能な期間、または次の締め付けが始まるまで有効です。
すべてのアクセサリーは、出力信号がマッピングされる場所と方法を示します。
出力信号を位置にマッピングするには:
コンポーネントまたは位置を選択します。
ドロップダウンメニューから信号を選択します
持続時間スイッチを時間または次の締め付けに設定します。
時間を選択すると、パラメータ入力ボックスが表示されます。出力信号の持続時間を秒で入力します。
点滅または断続信号にするはパルス位置スイッチをオンに設定し、点灯信号にするはオフに設定します。
位置がスタックライトの場合、回転オプションも使用できます。
入力信号の構成
入力信号は、ボタン、スイッチ、端子コネクタにマッピングできます。信号はコントローラから連続してサンプリングされます。
イベント入力信号がコントローラをトリガします。この例には、プッシュボタンを押して、放す行為があります。
信号がある間、状態入力信号は有効になります。この例には、キースイッチがあります。別の例としては、プッシュボタンを押し続ける方法があります。
すべてのアクセサリーは、入力信号がマッピングされる場所と方法を示します。
入力信号を位置にマッピングするには:
コンポーネントまたは位置を選択します。
ドロップダウンメニューから信号を選択します
2 方向スイッチなどの特定のコンポーネントは、2 つの入力信号で構成される場合があります。
入出力の組み合わせ
プッシュボタンのような特定のコンポーネントは、出力信号 (ランプ) と入力信号 (ボタン) の両方にマッピングされる場合があります。出力信号は、プログラム可能な期間、または次の締め付けが始まるまで有効です。入力信号はコントローラから連続してサンプリングされます。
すべてのアクセサリーは、出力信号がマッピングされる場所と方法を示します。
出力信号を位置にマッピングするには:
コンポーネントまたは位置を選択します。
コンポーネントタイプをドロップダウンメニューから選択します。選択したコンポーネントタイプに応じて、次の選択肢とパラメータ入力ボックスが表示されます。
出力信号をドロップダウンメニューから選択します。
持続時間スイッチを時間または次の締め付けに設定します。
時間を選択すると、パラメータ入力ボックスが表示されます。出力信号の持続時間を秒で入力します。
点滅または断続信号にするはパルス位置スイッチをオンに設定し、点灯信号にするはオフに設定します。
入力信号をドロップダウンメニューから選択します。
構成タイプ
内部入出力
コントローラーには 2 つのねじ込み端子が内側にあります。それらはデジタル入出力信号を接続する際に使用されます。
参照セクションに示されているすべてのデジタル入力信号とデジタル出力信号は、内部 I/O 端子に配線できます。
電気仕様および接続についてはコントローラマニュアルを参照してください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
入出力拡張器
I/O 拡張器は I/O バスに接続され、デジタル入出力信号を接続するための拡張機能を提供します。複数の拡張期を接続できます。接続のアドレス構成および仕様については I/O 拡張器のマニュアルをお読みください。
次のデバイスタイプを選択できます:
I/O ハブ:8 チャンネル
入出力拡張器: 16 チャンネル
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
オペレータパネル
オペレーターパネルは I/O バスに接続され、オペレーターとコントローラの間に環境設定可能なデジタル通信リンクを提供します。ランプ、ボタン、ブザーおよびスイッチが通信に使用されます。接続のアドレス構成および仕様についてはオペレーターパネルのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションに記載されています。
ソケットセレクタ
ソケットセレクタ構成の表示・編集または作成
ソケットセレクタは I/O に接続されており、オペレーターが、締め付け手順に正しいソケットを選択する際の手引きになります。
ソケットセレクタ構成の表示・編集
プラント構造
でコントローラを選択します。 構成
に移動します。ワークスペースエリアに、選択したコントローラに作成された構成のリストが表示されます。
選択したソケットセレクタ構成の名前をダブルクリックして、構成を表示または編集します。
ソケットセレクタ構成の作成
構成
で、追加を選択します。新しい構成の作成ポップアップウィンドウが表示されます。ドロップダウンリストから[ソケットセレクタ]を選択し、[追加]を選択します。
メニューのプロパティエリアに、構成の名前と説明を入力します。
ソケットセレクタ構成で、コントロールタイプの[自動]または[外部]を選択します。
有効にする各ソケットの位置に対して、チェックボックス
を選択します。無効にする各ソケットの位置に該当するチェックボックスをクリアします。
4 つのソケットのグループを追加または削除するには、追加または削除を選択します。
最大 32 のソケットセレクタの位置を使用できます。
構成の仮想ステーションへのアドレス指定と割り当ての詳細については、仮想ステーションセクション を参照してください。
ソケットセレクタのコントロールスイッチ
コントロールスイッチには次の 2 つの位置があります。
位置 | 説明 |
|---|---|
自動 | コントローラーは、ソケットセレクターのLEDランプを制御し、オペレーターが正しいソケットを選択できるようにします。 |
外部 | コントローラはソケットセレクタを制御しません。LED ランプのすべての機能は、オープンプロトコル通信またはフィールドバスモジュールを介して外部制御システムによって制御されます。 |
スタックライト
スタックライトはコントローラからオペレーターへの長距離視覚通信を提供します。ライトに加えて、アクセサリにはボタン、キースイッチ、ブザー、I/O接続を装備することができます。
スタックライトは I/O バスを使用してコントローラに接続されます。複数のアクセサリーが I/O バスに接続可能です。接続のアドレス構成および仕様についてはスタックライトのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション アイコン を参照してください。
スキャナ
スキャナーはアクセサリです。USBケーブルを介してコントローラーに直接取り付けられています。
スキャナ構成では、OnかOffとしてパスを構成することが可能です。デフォルト(初期設定)として、構成はOffです。パスが有効化されている(オンに設定されている)場合、スキャンされたバーコード情報は、解読の為に、SoftPLC またはフィールドバスのどちらかに送られます。
プラント構造ワークスペース
でコントローラーを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列にスキャナのある構成の行をダブルクリックします。
または、追加を選択して、新しいスキャナ構成を作成します。
パラメーター | 説明 |
|---|---|
名称 | オプションの構成名 |
説明 | オプションの構成説明 |
パススルー= On | 解読の為、SoftPLC またはフィールドバスのどちらかに、スキャンされたバーコードが送られます。 |
パススルー = Off | スキャンされたバーコードはコントローラーで解読されます。 |
Indicatorbox
インジケータボックスは、コントローラからのステータス信号を表示するために使用される柔軟性に富む表示インジケータです。ディスプレイには20個のデュアルカラーLEDが装備されています。これらは各面に5個のLEDのある正方形にマウントされています。
本セクション内
インジケータボックスの構成
LED 構成の追加
構成
メニューの インジケータ ボックスを選択します。 LEDを追加するには、追加 ボタンをクリックします。
図に従って、位置ボックスで LED 文字を選択します。
赤と緑のLEDの信号を選択します。
LEDを削除するには、LEDを選択して削除ボタンをクリックします。
ツール構成
ツール構成 - プロパティメニュー
ツール構成には固有の名前を指定してください。オプションの説明フィールドも使用できます。
アクセサリー構成リストは、すべての構成をアルファベット順に表示します。
ツール構成メニューを表示または編集するには:
プラント構造ワークスペース
でコントローラを選択します。メニューバーにある構成アイコン
を選択します。ワークスペースエリアに、現在のすべてのアクセサリー構成のリストが表示されます。
選択したツール構成の名前をダブルクリックします。
ワークスペースエリアは現在の構成の詳細を表示し、各トピックに 1 つのメニューに分割されています。
構成名と説明をプロパティメニューに入力します。
ツールタイプでフィルタドロップダウンメニューからツールタイプを選択します。
ツールの数が増えると、メニューの数も増えます。ワークスペースを見やすくするため、メニューを絞り込んで、選択されたツールタイプに関係するメニューのみを表示できます。フィルタはプロパティメニューで設定します。ツールなしを選択すると、すべての使用可能なツール構成パラメータが表示されます。
ツール構成 - 一般構成
アイドル時間タイムアウト | 説明 |
|---|---|
オン | バッテリーツール専用です。バッテリー時間を節約するために、特定の時間アイドルであるとツールが自動的にオフになるオプションがあります。1 ~ 1440 分の値を入力します。 |
オフ | アイドルであっても、ツールはオフになりません。 |
前面の LED | 説明 |
|---|---|
前面の LED が有効 | 無線ツール:オフ - ツールの前面の LED は常にオフ。オン - 前面の LED はツールトリガが押されると点灯し、前面の LED 時間に設定されている時間がトリガの解除時から開始されます。 ケーブルツール:前面の LED はツールのトリガが押されてから 10 秒間点灯します。 |
前面の LED 時間 | 無線ツール:ツールのトリガ解除時から開始される、前面の LED の点灯する秒単位での時間。 |
ソース開始を使ってツール開始方法を設定します。
ソースを開始 | 説明 |
|---|---|
トリガのみ | 締め付けを開始するには、ツールのトリガを押します。 |
トリガまたはプッシュ | ツールトリガを押すかツールをジョイントに押して付けて、締め付けを開始します。 |
トリガとプッシュ | ツールトリガを押してツールをジョイントに押して付けて、締め付けを開始します。 |
プッシュのみ | ツールをジョイントに押して付けて、締め付けを開始します。 |
デジタル入力 | 外部デジタル入力信号を使用して、締め付け開始をトリガします。 |
安全トリガー | トリガが 2 つあるツールのみに適用されます。締め付けまたは緩めを開始するには、2 つのトリガを同時に押す必要があります。連続締め付けの間では、両方のトリガを解除する必要があります。 |
トレース開始を使用して、締め付けトレースの開始方法を設定します。
トレース開始 | 説明 |
|---|---|
オフ | データトレースなし。 |
トリガが押された | プロセス強化のデータトレースは、トリガーを押すと直ちに開始します。 |
ランダウン完了 | 締め付けプロセスのデータトレースは、ランダウン完了が検知されると開始します。 |
要求の開始スイッチは、ツールとコントローラ間の通信が失われる時の操作を定義します。
要求の開始により、すべてのバッテリーツールについて、ツールとコントローラ間の接続の要件が有効になります。これにより、ツールが締め付けプログラムまたはバッチ設定で、また締め付けを行う際に、コントローラの他の設定で常に最新になるようにできます。
開始要求がオンに設定されると、コントローラとの接続を失った場合にツールがロックされます。つまり、ツールが締め付けまたはバッチシーケンスの途中で接続を失った場合、ツールは進行中の締め付けを終了してから停止します。接続が再確立されるまで、ツールはロックされます。
要求の開始 | 説明 |
|---|---|
オン | コントローラとツール間の通信が失われると、現在の締め付けプログラムを終了して、次の締め付けを停止します。 |
オフ | コントローラとツール間の接続が失われた場合でも、現在の締め付けプログラムまたはバッチを終了できます。 |
タグ番号は、ST レンチでエンドフィッティングツールを識別するために使用される RFID タグです。次のオプションが利用可能です。
タグチェック | 説明 |
|---|---|
オン | エンドフィッティングツール (ソケット) のタグ番号を確認します。タグ番号は、締め付けプログラム構成の番号と同一でなければなりません |
オフ | タグチェックは行われません。 |
タグ選択 | 説明 |
|---|---|
オン | バッチシーケンスのバッチを選択するには、エンドフィッティングツール (ソケット) のタグ番号を使用します。タグ番号は、バッチシーケンスセクション |
オフ | タグ値は、バッチを選択するためには使用しません。 |
[メモリー満杯時にツールをロック] は、ツールメモリがいっぱいの場合でも、ツールが締め付けを実行する可能性を提供します。つまり、ツールメモリがいっぱいになったときに実行される締め付けは、コントローラに報告されません。
メモリー満杯時にツールをロック | 説明 |
|---|---|
オン | ツールのメモリが満杯になると、ツールはそれ以上の締め付け操作からロックされます。締め付け作業を再開するには、ツールはコントローラーへの接続を再確立し、ツールメモリに保存されている締め付け結果を送信する必要があります。 |
オフ | ツールは、ツールのメモリが満杯の場合でも引き締めを実行し続けます。 |
ツール構成 - 方向スイッチ
ツールの方向スイッチは、時計回り(CW)から反時計回り(CCW)および戻り、またはその逆にすぐに切り替えられた際に入力信号を一つトリガするように構成することができます。
プラント構造ワークスペース
でコントローラを選択します。メニューバーにある構成アイコン
を選択します。ワークスペースエリアに、現在のすべてのアクセサリー構成のリストが表示されます。
選択したツール構成の名前をダブルクリックします。
[方向スイッチ]フィールドで、[入力]ドロップダウンリストから必要な信号を選択します。
ツール構成 - 機能ボタン
ツールの機能ボタンを使用して、最大6個の使用可能な入力信号を制御します。ボタンには、方向スイッチの 2 つの可能な状態と組み合わされる 3 つの可能な条件状態があります。
機能ボタンの状態 | 方向スイッチの状態 |
|---|---|
押された状態 | CW |
シングルプッシュ | CW |
ダブルプッシュ | CW |
押された状態 | 反時計回り |
シングルプッシュ | 反時計回り |
ダブルプッシュ | 反時計回り |
2 つの構成可能なパラメータが、プッシュ時間を制御します。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
プッシュ検出間隔(ms) | ワンプッシュの場合:時間押されているボタンとリリースされているボタン間の最長プッシュ時間(ミリ秒)。 | 300 ms |
次のプッシュ間隔(ms) | ダブルプッシュの場合:最初のプッシュ後にリリースされたボタンと再び押されたボタン間の最長時間(ミリ秒)。 | 300 ms |
ツール構成 - ツールLED
ツールLEDを使用して、さまざまなメッセージをオペレーターに通知できます。
LEDの構成
プラント構造ワークスペース
でコントローラを選択します。ワークスペースエリアの上部にあるメニューバーから構成
アイコンを選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加を選択して、新しい構成を作成します。
ワークスペースにすべてのツール構成メニューが表示されます。
関連する構成を実行します。構成はToolsTalk 2に自動的に保存されます。
ツール LED には次の機能があります。
前面 LED は作業エリアを照らし、サポートされているツールの結果ステータスを示すのに使用できます。
青色 LEDはツール LED の一部であるか、サポートされているツールの EHMI または RHMI の一部でを成します。出力信号は青色 LED に接続できます。
ステータス LEDは、赤、黄、緑のリング、または特定のピストルツールでそれぞれが分割されたマルチカラーリングで構成されています。出力信号はステータス LED に接続できます。
結果インジケーターでは、締め付け結果のステータスを示すツール LED の点灯方法と、サポートされているツールにおける点灯表示の持続時間を構成できます。
出力信号は、イベントタイプまたは状態タイプのいずれかとなります。
出力信号が有効であれば、状態信号は有効になります。
イベント信号は、構成された時間範囲内で有効になります。
青色 LED
青色 LED は、イベントまたはステータス出力信号で構成できます。信号ステータスは常時点灯で表示されます。
青色 LED を構成するには:
青色 LED に接続する信号を選択します。
オプション: イベント信号の継続時間を設定します。
特定のツールタイプにおける青色 LED は、EHMI または RHMI の青色の表示で、置き換えられるか補完されます。
結果インジケーター
この結果インジケーターでは、締め付け結果のステータスを示すツール LED の点灯方法と、点灯表示の持続時間を構成します。
構成は、サポートされているツールの前面 LED とステータス LED の結果表示に影響します。これには点灯パターンと点灯期間が含まれます。パターンがオフに設定されている場合、ツール構成ビューで前面 LED がオンに設定されていても、結果表示は使用されません。
サポートされているツールで前面 LED の結果表示を使用するには、ツール構成ビューで前面 LED をオンに設定する必要があります。
前面 LED では緑色と赤色が使用できます。黄色を使用するパターンは、前面 LED で黄色に表示されません。
信号 | 説明 |
|---|---|
オフ | 結果にかかわらず、LED は締め付け後に点灯しません |
緑 | 締め付け作業に問題がなければ、緑色 ライトが常時点灯します。 |
赤:高:黄:低 | 締め付けが誤って終了した場合 (NG)、赤の LED が、最終的な値が高すぎることを示すか、黄色の LED が、値が低すぎることを示します。赤と黄が同時に点灯します (トルクが高すぎる場合や、角度が小さすぎる場合など)。 |
赤:高 (prio) :黄:低 | 締め付けが誤って終了した場合 (NG)、赤の LED が、最終的な値が高すぎることを示すか、黄色の LED が、値が低すぎることを示します。赤と黄は同時に点灯できません。高と低の値が同時に発生する場合には赤のみが点灯します。 |
赤: NG: 黄: 低 | 赤の LED は、締め付けが不正に終了したことを示します (NG)。値が低すぎる場合、追加の黄色の LED を示すことができます。 |
赤:NG | 赤の LED は、締め付けが不正に終了したことを示します (NG)。追加の LED は表示されません。 |
ステータス LED
ステータス LED は、赤、黄、緑の 3 色の LED で構成されています。各ライトは点灯または点滅します。これらのライトは、LED に接続できる合計 6 個の異なる信号を提供します。
ステータス LED を構成するには
各色と各機能 (常時点灯、点滅) について、ショートカットメニューから出力信号を選択します。
オプション: イベント信号の継続時間を設定します。
ツールで、ステータス LED 信号と結果表示を同時に表示させることはできません。以下の条件が適用されます:
締め付けが進行中でない場合と制御出力信号が有効になった場合にのみ、LED は構成済みの信号によってオンになります。
イベントタイプの信号が構成された時間に達していなかったり、状態タイプの信号に対して制御出力信号が無効になっていなくても 、次の締め付けが開始すると LED はオフになります。
構成された信号に対して更新 (有効化または無効化) が行われた場合、ステータス LED の結果表示は無効化します。
持続時間
持続時間は、トリガーが放された後、結果表示の点灯が持続する時間を決定します。
パラメーター | 説明 |
|---|---|
次の締め付けへ | 青色LED、ステータスLED、および結果表示は、次の締め付けが開始するまで点灯状態を保ちます。 |
時間 | 有効化した後、構成した時間分だけ青色 LED が点灯します。 ステータス LED は、起動後、または次の締め付けが始まるまで、構成した時間分だけ点灯します。 結果表示は、トリガーが解除されてから構成された期間が切れるまで、または次の締め付けの開始まで点灯し続けます。 |
ツール構成 - ブザー
ブザーは、さまざまな音が鳴るように構成できます。出力信号を各信号にマップして、オペレーターに音声インターフェースを提供します。
ブザーはツールにあり、ツールアクセサリー同様に構成されます。
コマンド | 説明 |
|---|---|
追加 | 新しいサウンド構成を表に追加します。 |
削除 | 選択したサウンド構成を削除します。 |
1 つのサウンドに最高 20 の異なる信号がマッピングでき、各サウンドは、以下の表に説明されているパラメータを持つ独自の特性プロファイルを持つことができます。
パラメータ | 説明 |
|---|---|
チェックボックス | 表の行を選択します。 |
信号 | サウンドをトリガする信号を選択します。 |
頻度 | 正確な周波数(Hz)。 |
オン時間 | ブザーが音声を発する時間(ミリ秒)。 |
オフ時間 | ブザーが音声を出さない時間(ミリ秒)。 |
繰り返し | ブザーがオン / オフシーケンスを繰り返す回数。 |
音量 | ブザーの音量(最大音量の割合)。 |
優先度 | 音に対して 10 個の優先度レベルが利用可能であり、そのうち 1 つは、最も優先度の高いレベルです。デフォルトの優先度は 5 です。 |
2 つの同時信号の場合は、優先度の高い信号が他の信号より優先されます。
ブザー信号は終了されるまで動作し、より高い優先度の信号で中断されません。
ツールアクセサリーバスの構成
オプションのツールアクセサリーは、工場出荷時にインストールするか、後の段階でインストールできます。アクセサリーはツールアクセサリーバスに接続されます。出力としての小さなディスプレイと、入力としてのボタンがあります。機能は、コントローラ GUI、Web GUI、またはToolsTalk 2 GUI から構成されます。
ツールアクセサリーのハードウェアのインストールについては、アクセサリーのマニュアルとツールに特定したマニュアルを参照してください。ToolsTalk 2 からアクセスできる構成パラメータは、この文書で説明されています。
プラント構造ワークスペース
でコントローラを選択します。ワークスペースエリアの上部にあるメニューバーから構成
アイコンを選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加を選択して、新しいツール構成を作成します。
構成をダブルクリックして、選択した構成メニューを開きます。
アクセサリーバスメニューに、構成できるアクセサリーが表示されます。
選択したタイプをダブルクリックして、その構成のショートカットウィンドウを開きます。
タイプ | 説明 |
|---|---|
ST セレクタ | 構成に応じてタスクまたはプログラムを選択するために使用する小型のディスプレイとボタン。 |
TLS タグ | オペレーターに対して出力信号を提供するのに用いるツール位置システムタグ。 |
EHMI | 構成に応じてタスクまたはプログラムを選択するために使用する小型のディスプレイとボタン。 |
スキャナ | それは、ツールにインストールされて、ツール・アクセサリーバスに接続され、スキャナを稼働させる1個の機能ボタンを持っています。 |
ツール位置システム (TLS) タグの構成
ツール位置システム (TLS) タグはツールのアクセサリーです。TLS タグはツール上にインストールされ、ツールアクセサリーバスに接続されます。これは、Ubisense 位置決めシステムの一部であり、コントローラから独立して処理されます。位置決めに加えて、TLS タグは、オペレーターに情報を提供するために使用することができます。選択した出力信号は、異なる LED ライトの組み合わせを生成することができます。
プラント構造ワークスペース
でコントローラを選択します。ワークスペースエリアの上部にあるメニューバーから構成
アイコンを選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加コマンドボタンをクリックして、新しいツール構成を作成します。
アクセサリーバスメニューで TLS タグをダブルクリックして、その構成のショートカットウィンドウを開きます。
選択した構成を行います。構成はToolsTalk 2に自動的に保存されます。
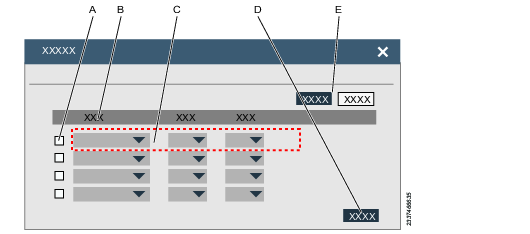
A | チェックボックス | B | テーブルの見出し行 |
C | ショートカットメニューのあるテーブル行 | D | コマンドボタン |
E | コマンドボタン |
コマンド | 説明 |
|---|---|
追加 | 新しい構成を表に追加します。 |
削除 | 選択した構成を削除します。 |
閉じる | ショートカットメニューを閉じます。 |
最大 10 個の異なる出力信号をライトの優先度にマッピングできます。
パラメータ | 説明 |
|---|---|
チェックボックス | 表の行を選択します。 |
信号 | ショートカットメニューから、LED ライトをトリガする信号を選択します。 イベントタイプの信号について、信号の持続時間を選択します。 |
色 | LED の色を選択します。 |
優先度 | 音に対して 10 個の優先度レベルが利用可能であり、そのうち 1 つは、最も優先度の高いレベルです。デフォルトの優先度は 5 です。 |
2 つの同時信号の場合は、優先度の高い信号が優先となります。同じ優先度を持つ 2 つの信号が LED をトリガすると、最初に受信された信号が優先されます。
出力信号は、イベントタイプまたは状態タイプになる場合がありです。
状態が有効であれば、状態信号は有効になります。
プログラム可能時間中、イベント信号は有効になります。
拡張ヒューマンマシンインターフェイス(EHMI)の構成
EHMI はツールアクセサリです。ツール上にインストールされ、ツールアクセサリーバスに接続されます。グラフィカルディスプレイ、3 つの機能ボタン、オプションのスキャナがあります。ディスプレイは、締め付けプログラムやバッチシーケンスなどを選択できるコントローラ GUI のサブセットです。オペレーターのコントローラへの操作は、機能ボタンを使用して行います。
EHMI 構成では、機能ボタンをオンまたはオフに設定するかどうかを構成できます。
プラント構造ワークスペース
でコントローラを選択します。上部メニューバーにある構成アイコン
を選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加を選択して、新しいツール構成を作成します。
アクセサリーバスメニューで EHMI をダブルクリックして、その構成のショートカットウィンドウを開きます。
選択した構成を設定します。構成はToolsTalk 2に自動的に保存されます。
パラメータ | 説明 |
|---|---|
機能ボタン = オン | ボタンには、表示されたメニュー内の設定を構成するための全機能があります。 |
機能ボタン = オフ | 機能ボタンは、EHMI で必要なダイアログを確認するためだけに使用できます。 |
STセレクタの構成
STセレクタはツールアクセサリーです。ツール上にインストールされ、ツールアクセサリバスに接続されます。小型ディスプレイ、2 つの入力ボタンおよび出力 LED を備えています。
プラント構造ワークスペース
でコントローラを選択します。ワークスペースエリアの上部にあるメニューバーから構成
アイコンを選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加コマンドボタンを選択して、新しい構成を作成します。
ワークスペースにすべてのツール構成メニューが表示されます。
アクセサリーバスメニューで ST セレクタをダブルクリックして、その構成のショートカットウィンドウを開きます。
選択した構成を行います。構成はToolsTalk 2に自動的に保存されます。
ディスプレイ
ディスプレイは、一度に 1 つの情報を表示でき、設定可能な表示時間の表示を切り替える 5 つの異なるメッセージがあります。
パラメータ | 説明 |
|---|---|
スイッチ時間 | 次のメッセージが表示される前に 1 つのメッセージを表示する時間を選択します。 |
ページ | 1~4 のそれぞれのページについて、スイッチ時間中にディスプレイで表示されるメッセージをショートカットメニューから選択します。 |
ボタン
2 つのボタンを、表示された情報に作用するように構成して、リスト表示した項目を移動するのに用いることができます。
パラメータ | 説明 |
|---|---|
左ボタン | ショートカットメニューから 1 つの操作を選択します。 |
右ボタン | ショートカットメニューから 1 つの操作を選択します。 |
ステータス LED
ステータス LED を有効化または無効化することができます。
パラメータ | 説明 |
|---|---|
結果 LED の有効化 | 所望するオンまたはオフのラジオボタンを選択します。 |
追加 LED の有効化 | 所望するオンまたはオフのラジオボタンを選択します。 |
結果 LED は、赤、緑、黄色であり、主要なツールの LED と同じ情報を示します。
2 つの追加 LED は、バッチ OK とバッチシーケンス OK を表示できます。これらの両方の LED は、次の締め付けで自動的にオフになります。
オープンエンドの構成
オープンエンドツールを使用する前に、ツールヘッドとツールボディが正しく組み立て・構成されていることを確認してください。そうしなかった場合、ツールが間違った方向に動く可能性があり、オープンエンドヘッドの機械的停止装置が損傷する可能性があります。
オープンエンドツールで締め付けを行った後、オープンエンド構成を通じて、オープンエンドツールを再び開位置に戻すことができます。
HMI (ヒューマンマシンインターフェイス) を使用して、オープンエンドの戦略と設定を構成します。
オープンエンド構成は、 ケーブルツール、IXB ツール 、および STB ツールにのみ適用できます。
オープンエンド構成は Flex および同期締め付けには適用されません。
オープンエンドの構成
設定 | 説明 |
|---|---|
自動位置決め | オープンエンドツールで締め付けを行った後、オープンエンドツールを自動で開位置に戻すことができます。 トグルキーは 自動位置決めを オン または オフに切り替えます:
自動位置決めは、マルチステップ締付けプログラムにのみ適用できます。 自動位置決めは、ケーブルツールと IXB ツールにのみ適用できます 。 |
位置決め戦略 | 締め付け後にオープンエンドツールを開いた位置に戻すには、位置決め戦略を選択します 。
前部が回転するオープンエンドツールでは逆トルクベース と 正転高速スタート の戦略の使用をお勧めします 。 逆転トルクベース と 正転高速スタート 戦略は ケーブルツール と IXBツール にのみ適用可能です。 |
位置決め速度 | [位置決め速度] は、ツールが開位置に達する速さを定義します。 オペレーターは、5% ~ 100% の範囲の [位置決め速度] の値を入力できます。 |
ツール構成 - バイブレーター
バイブレーターを装備したツールは、異なる信号に対して振動を発するように構成できます。
バイブレーターは、リストから選択された信号に振動パターンを割り当てることにより構成されます。振動信号の優先度は 1 ~ 10 で、1 が最高、10 が最低の優先度になります。既定では、信号とバイブレーションの優先度は 5 です。
振動信号は、優先度の高い信号によって中断されない限り、終了するまで実行されます。
プラント構造ワークスペース
でコントローラを選択します。ワークスペースエリアの上部にあるメニューバーから構成
アイコンを選択します。ワークスペースエリアに構成のリストが表示されます。
タイプ列に存在する、ツール構成を持った構成行をダブルクリックしてください。
または、追加を選択して、新しいツール構成を作成します。
構成をダブルクリックして、選択した構成メニューを開きます。
[バイブレータ] メニューには、IXB ツールが接続されているかどうかが表示されます。
必要に応じて、パラメータを設定します。
パラメータ
説明
信号
振動パターンを割り当てる信号を選択します。
優先度
バイブレーションには10種類の優先度レベルがあり、1 が最優先レベルです。デフォルトの優先度は 5 です。
オン時間
ツールがバイブレーションを発する時間 (ミリ秒単位)。
オフ時間
バイブレーターが静かになる時間 (ミリ秒単位)。
繰り返し数
バイブレーターがオン/オフシーケンスを繰り返す回数。
一般仮想ステーション
一般仮想ステーションの追加
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列に一般仮想ステーションを持った構成行をダブルクリックしてください。
または、 追加 を選択して、新しい一般仮想ステーション構成を作成します。
パラメータ | 説明 |
|---|---|
名称 | オプションの構成名 |
説明 | オプションの構成説明 |
締め付けなしの結果は、フィルタされずに (デフォルト) 報告されるか、選択さた結果が報告されるように構成することができます。16 までの一般仮想ステーション構成が作成できます。
関係する締め付けなしの結果:
緩め
バッチ増分
バッチ減分
バッチをリセット
締め付けプログラムのバイパス
バッチシーケンスの中止
開始されていないシーケンスを中止
バッチシーケンスのリセット
本セクション内
締め付け設定の有効化と無効化
一般仮想ステーション構成には、締め付け無効化と緩め無効化のパラメータの設定に使用される締め付けセクションがあります。
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
に移動します。ワークスペース領域には、使用可能な構成が表示されます。
既存の一般仮想ステーションをダブルクリックして構成するか、追加を選択して構成する新しい仮想ステーションを作成します。
次の表の情報に従って、[締付け設定] パラメータで適切な選択を行います。
緩めでツールのロックを解除する設定
パラメータ値 | 説明 |
|---|---|
オフ | 無効化されたツールは、緩めのステータスに関係なく無効化されたままになります。 |
OK時 | 無効化されたツールは、OK 緩めが実行された後にロック解除されます。 |
常時 | 無効化されたツールは、緩めステータスに関係なく、緩めが実行されるとすぐにロック解除されます。 |
緩め無効化設定
誤ってボルトを緩めないようにするため、緩め無効化という機能があります。緩めを無効にする設定には次の 4 つがあります:
設定 | 説明 |
|---|---|
オフ | 緩めが常に有効になります。ボルトを緩めることは常に可能です。 |
OK 締め付け時 | OK 締付け後は緩め不可となります。正しく締めたボルトを緩めることはできません。 |
締め付け NG 時 | NG 締付け後は緩め不可となります。締め付けが正しくないボルトを緩めることはできません。 |
常時 | 緩めが常に無効になります。ボルトを緩めることはできません。 |
これらの設定は、タスクの実行中に有効です。緩めは、設定と最後の締め付けのステータスに応じて有効または無効になります。新しいタスクの場合、緩め無効化の開始状態は次のように設定されます:
設定 | 新しいタスクの開始状態 |
|---|---|
オフ | 緩め有効。ボルトを緩めることが可能です。 |
OK 締め付け時 | 緩め無効。ボルトを緩めることはできません。 |
NOK 締め付け時 | 緩め無効。ボルトを緩めることはできません。 |
常時 | 緩め無効。ボルトを緩めることはできません。 |
開始状態は、新しいタスクが仮想ステーションに割り当てられるとき、またはタスクが再開されたときに適用されます。開始状態は、次に説明するように、タスクの種類に応じて異なる場合があります。
締め付けプログラムと同期モード
緩めの有効化または無効化の設定は、緩め無効の設定に従い、最後の締め付け時の状態に設定されます。
バッチシーケンス
バッチシーケンス中、緩めの有効化または無効化は緩め無効の設定に従い、最後の締め付け時の状態に設定されます。これは、バッチがバッチシーケンス内の次のバッチに進む場合にも当てはまります。バッチシーケンスが再開されると、新しいタスクの開始状態に応じて緩めが有効または無効になります。
ソースバッチ
緩めの有効化と無効化は、バッチシーケンスで説明した手順と同じです。進行中のソースバッチが再開されるか、新しいバッチが選択された場合、新しいタスクの開始状態に応じて緩めが有効または無効になります。
ソース締め付け (バッチ制御なし)
バッチ中は、前回の締付けの状態に応じて有効化と無効化が設定されます。別のプログラムを選択すると、新しいタスクの開始状態に応じて有効化と無効化が設定されます。プログラム、ツール、またはソケットの変更が行われた場合、新しいタスクの開始状態に応じて有効化と無効化が設定されます。
マルチスピンドルの締め付け
緩めの有効/無効は、常に最後の締め付けのステータスに従います。これは新しい同期モードにも適用されます。
締め付け無効化設定
オペレーターが誤ってボルトを締め付けないようにするため、締め付け無効化という機能があります。締め付けを無効にする設定には次の 4 つがあります:
設定 | 説明 |
|---|---|
オフ | 締め付けが常に有効になります。ボルトの締め付けは常に可能です。 |
OK 締め付け時 | 締め付けは、OK 締め付け後に無効になります。正しく締め付けられたたボルトを締め付けことはできません。 |
締め付け NG 時 | NG 締付け後は締め付け不可となります。締め付けが正しくないボルトを締め付けることはできません。 |
常時 | 締め付けが常に無効になります。ボルトの締め付けは不可能です。 |
これらの設定は、タスクの実行中に有効です。締め付けは、設定と最後の締め付けのステータスに応じて有効または無効になります。新しいタスクの場合、締め付け無効化の開始状態は次のように設定されます:
設定 | 新しいタスクの開始状態 |
|---|---|
オフ | 締め付け有効 |
OK 締め付け時 | 締め付け有効 |
NOK 締め付け時 | 締め付け有効 |
常時 | 締め付けが無効です |
開始状態は、新しいタスクが仮想ステーションに割り当てられるとき、またはそのタスクが再開されたときに適用されます。開始状態は、「緩め無効化設定」セクションで説明されているように、タスクの種類によって異なる場合があります。
無効にしたツールを緩めた後にロック解除できるようにする
ツールで使用する構成 (ツールが接続されている仮想ステーションで設定) で、[緩めでツールロック解除] を [OK時] または[常時]に設定します。
上記の設定を有効にするには、次の条件を満たす必要があります:
1.[緩めを無効にする] パラメータが [オフ] または[常時]に設定されていない必要があります。
2。締め無効値を締め付け無効化と同じ値に設定することはできません。
3。使用される締め付けプログラムで、緩めが有効になっている必要があります。
無効状態であるために、ツールの締め付けまたは緩めがロックされた場合、次の入力信号のいずれかによってロック解除することができます。
Master_Unlock
Unlock_Tool_On_Disable
この入力信号は、アクセサリー、プログラム可能なツールアクセサリー、フィールドバスユニットのいずれかからコントローラに送信できます。
関連情報
ライブ結果設定の構成
[ライブ結果設定]ウィンドウで、ユーザーは、プリべリングトルク補正値がコントローラーのライブ結果セクションに表示されるかどうか、およびプリべリングトルク補償値が最終的なトルク結果の一部になるかどうかを定義できます。
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
に移動します。ワークスペース領域には、使用可能な構成が表示されます。
既存の一般仮想ステーションをダブルクリックして構成するか、追加を選択して構成する新しい仮想ステーションを作成します。
[ライブ結果設定]ウィンドウで、目的の結果に応じて、関連するスイッチをオンまたはオフに設定します。
[PrT 補正値を表示] スイッチが [オン] に設定されている場合、コントローラーの [ライブ結果] ウィンドウに PrT 補正値が表示されます 。
[PrT補正でトルクを表示]スイッチがオンに設定されている場合、コントローラーの[ライブ結果]ウィンドウに、 PrT補正を含む最終トルクが表示されます。
[ライブ結果設定]ウィンドウでスイッチをオンまたはオフに設定しても、次の場合を除いて影響はありません:
マルチステッププログラムには、補正スイッチがオンに設定されたプリベリングトルクステップモニターを含む締め付けステップがあります。
コントローラーの [ライブ結果] ウィンドウには、結果がどのように表示されるかが表示されます。PrT 補正値を表示か、PrT 補正でトルクを表示がオンまたはオフに設定されているかによって結果がどのように表示されるかが異なります。詳細は、それぞれのコントローラーのユーザーガイドを参照してください。
コントローラ情報タブの操作
コントローラ情報  タブのメニューでは、単一の選択コントローラについての情報を示します。
タブのメニューでは、単一の選択コントローラについての情報を示します。
コントローラ情報メニューの表示:
プラント構造ワークスペース
でコントローラを選択します。[コントローラ
]タブに移動します。ワークスペースエリアにコントローラメニューが表示されます。
コントローラワークスペースに次のメニューが示されます。
メニュー | 機能 |
|---|---|
コントローラ情報 | コントローラと IAM モジュールの一般情報を示します。 コントローラが無効な情報または設定を送信した場合、影響を受けるパラメータとともに例外がエラーメッセージとして表示されます。 |
ライセンス | コントローラに発行されたさまざまなライセンスタイプに関する情報を提供します。 |
ソフトウェア | コントローラのソフトウェア構成に関する情報を示します。 |
ハードウェア | コントローラのハードウェア構成に関する情報を提供します。 |
エクスポート/インポート | コントローラの結果と構成のエクスポートと、コントローラ構成のインポート。ファイル位置のためのダイアログボックスが表示されます。 |
正常性 | 環境パラメータとシステムの正常性パラメータの監視と記録を行います。 |
表示される情報は情報を示すだけです。パラメータの設定はメニューではできません。
コントローラ情報と IAM メニュー
インテリジェントアプリケーションモジュール(IAM)は、コントローラドアの内側にあります。IAM にはコントローラプログラム、構成パラメータおよび保存結果が含まれています。
IAM モジュールは容易に取り外し、他のコントローラへ移動することができ、その後で前のコントローラと全く同じように機能します。
コントローラ情報メニューと現在の構成を表示するには:
プラント構造
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
型式 | コントローラのタイプに関する一般情報を示します。 |
Serial number (シリアル番号) | コントローラのシリアル番号に関する情報を示します。 |
イーサネット用サービスポート | サービスポートの IP アドレスに関する情報を示します。このポートから、サービスエンジニアは工場ネットワークに接続することなく、コントローラにアクセスできます。 |
メニュー | 機能 |
|---|---|
タイプ | アトラスコプコは種々の機能を備えた異なる IAM タイプを提供しています。 |
顧客キー | アプリケーション特定、または顧客特定の構成のための識別子です。 |
Serial number (シリアル番号) | IAM モジュールのシリアル番号に関する情報を示します。 |
ソフトウェアメニュー
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
現在のバージョン | 主要な有効で動作中のソフトウェア。 |
保存したバージョン | 保存されている無効なソフトウェア。 |
インストールされているソフトウェアのバージョンを切り替えることも可能ですが、これには次の 2 つの利点があります。
コントローラソフトウェアは通常作業と並行してコントローラにロードすることができる。いくつかのコントローラを更新する際にすべてのコントローラを同時にすばやく切り替えることができます。
ソフトウェアアップグレードが予期しない結果となった場合、以前のバージョンへ切り替えることで迅速にバックアップによる解決ができる。
ライセンス
このフィールドには、コントローラに発行された使用可能なライセンスタイプと機能が表示されます。
ハードウェア構成
このメニューには、システムハードウェア構成に関する情報が示されます。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
Power Focus 6000 では、メニューの名前はハードウェアです。情報では、コントローラを構成するハードウェアモジュールを一覧表示します。
各モジュールについて、次のデータが示されます。
Serial number (シリアル番号)
製品番号
ハードウェア改訂番号
コントローラハードウェアの詳細については、 Power Focus 6000 のマニュアルを参照してください。
FlexController では、メニューの名前はチャンネルです。この情報には、コントローラを構成するさまざまなハードウェアドライブとツールが一覧表示されます。
エクスポートとインポート
エクスポートおよびインポートの機能を用いて、外部プログラムでの分析のために、結果メニューでアクセスできるイベントと締め付け結果をエクスポートするとともに、コントローラー間で締め付けプログラム、バッチ、およびコントローラー構成を転送します。
エクスポートコマンドは、次の目的に使用できます。
さらに処理するために締め付け結果やイベントをエクスポートする。
アトラスコプコのサービスエンジニアによるデバッグ作業のための、ログファイルのエクスポート。
別のコントローラーに構成をコピーするために使用できるコントローラー構成全体のエクスポート。
違いを見るための、エクスポートされた 2 つの構成の比較。
コントローラー情報のエクスポート
プラント構造
でコントローラーを選択します。コントローラー
に移動します。ワークスペースエリアにコントローラーメニューが表示されます。
エクスポートボタンをクリックして、次のいずれかをエクスポートします。
パラメーター
説明
エクスポート
すべてのコントローラー情報をエクスポートします。
構成のエクスポート
設定と構成をエクスポートします。
ツールログのエクスポート
接続されているツールからログ (締め付けおよびハードウェアの情報) をエクスポートします。SRB、TBP、STB、QST-M で使用できます。
エクスポートは atlas_tool_i.zip と ExportInfo.txt から構成されます。
エクスポートファイルを保存する場所を選択して、OK をクリックします。
コントローラー情報のインポート
プラント構造
でコントローラーを選択します。コントローラー
に移動します。ワークスペースエリアにコントローラーメニューが表示されます。
コントローラー構成をインポートするには、インポートコマンドボタンをクリックします。
ファイルを開くをクリックします。インポートするファイルを選択します。
インポートするファイルは事前にエクスポートされているファイルである必要があります。
インポート機能を使うと、締め付けプログラム、バッチ、アクセサリ、コントローラーの設定はすべてインポートファイルの設定と置き換えられます。ただし、ネットワークの設定、PIN、結果およびイベントはインポートされません。
自動バックアップ
自動バックアップウィンドウは、sFTPエクスポートを有効または無効にします。
デフォルトでは、 sFTP エクスポートスイッチ有効化 はオフに設定されています。
sFTPエクスポート有効化スイッチをオンにすると、最後の構成変更の10分後にエクスポートファイルが作成されます。
システムの起動時にsFTPエクスポート有効化スイッチがオンに設定されている場合、エクスポートファイルは2〜3分以内に自動的に作成されます。システムがシャットダウンする前に行われた可能性のある変更を反映するために、エクスポートファイルは2〜3分以内に作成されます。
新しいバックアップファイルが使用可能になる前に、古いバックアップファイルが削除されます。
エクスポートされたファイルのデータには、コントローラーのすべての構成と設定が含まれます。
sFTPユーザーは、システムの次のディレクトリに保存されているエクスポートファイルを取得できます:/Export/<エクスポートファイル名>
sFTPをサポートするシステムが必要となります。
sFTPユーザーはファイルを取得するためにパスワードを使用する必要はありません。
sFTPユーザーのユーザー名は次のとおりです:
ユーザー名 | 自動エクスポート |
システム正常性モニター
機器の正常性モニターでは、パラメータを定期的に測定して、保存します。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
正常性メニューには環境データとシステム正常性情報が表示されます。
情報 | 値 | 説明 |
|---|---|---|
リフレッシュコマンドボタン | 摂氏または華氏 | コントローラから情報を読み取り、最新の結果を表示します。 |
コントローラー温度 | 摂氏または華氏 | 月/日/年 時:分:秒で表示される最新の温度記録値。 |
バッテリーステータス | OK/NOK | コントローラのコンピュータボードでメモリとリアルタイムクロックバッテリーを監視します。 ステータスメッセージの NOK は、データの喪失や間違った結果を避けるために、早急にバッテリーの充電が必要なことを意味します。 月/日/年 時:分:秒で表示される最新の記録値。 |
履歴コマンドボタン | モニター測定値のリストを示します。 |
サーバー接続状態
サーバー接続状態は、サーバーの接続ステータスを示します。現在、ToolsNetに接続されているサーバーのみが使用可能です。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
[サーバー接続状態]メニューには、サーバーのステータスが表示されます。
情報 | 説明 |
|---|---|
リフレッシュコマンドボタン | コントローラ-から情報を読み取り、最新の結果を表示します。 |
構成 | コントローラで構成が有効になっているかどうかを示します。構成を有効にするには、コントローラーの[設定]でサーバー接続を構成します。 |
接続 | サーバーへの接続のステータスを表示します。OK/NG |
サーバーメッセージ | サーバーからのメッセージ。 |
フィールドバスとSoftPLCタブの使用
フィールドバスとSoftPLC は、単一のコントローラーがプラント構造で選択されている場合、フィールドバスと SoftPLC タブにあります。
フィールドバスは、工場管理システム (フィールドバスマスター) とリモートノード (フィールドバスの下位) の間の通信リンクです。ノードはコントローラーのように複雑なことがありますが、センサーやバルブのように単純なユニットである場合もあります。
フィールドバスと SoftPLC タブは4つのセクションに分かれています。
概要の構成
フィールドバス構成
非周期データ構成 - 同期締め付けでのみ使用可能です。
SoftPLC 構成
関連情報
概要構成タブ
フィールドバス設定
接続状態は、次のステータスメッセージを表示することがあります。
ステータス | 説明 |
|---|---|
Fieldbus_Online | フィールドバスモジュールはオンライン。コントローラーとフィールドバスマスター間の通信は有効です。 |
Fieldbus_Offline | フィールドバスモジュールはオフライン。コントローラーとフィールドバスマスター間の通信は無効です。 |
Fieldbus_NoModuleInstalled | コントローラーにフィールドバスモジュールが検出されませんでした。 |
Fieldbus_NotConfigured | フィールドバスモジュールがコントローラーに検出されましたが、モジュールは構成されていません。 |
Fieldbus_Initializing | フィールドバス状態がリセット中であるか、グローバルパラメーターが変更された結果です。定常状態が表示されるまでの一時的な状態です。 |
フィールドバス状態は次のエラーを示すこともあります。
エラーコード | 説明 | 対処 |
|---|---|---|
Fieldbus_ModuleMismatch | サポートされているモジュール。パラメーターの不一致が検出されました。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_UnsupportedModuleInstalled | サポートされていないフィールドバスモジュール。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_ConfiguredModuleNot Installed | 構成データが作成されました。モジュールが検出されませんでした。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_Unexpectedconfigurationerror | コントローラーと ToolsTalk 2 間の不一致。 | エラーログを読むにはアトラスコプコに連絡してください。 |
フレームサイズやフィールドバスモジュールアドレスなどの一部のグローバルパラメーターを変更すると、フィールドバスモジュールがリセットされます。
プラント構造ワークスペース
でコントローラーを選択します。メニューバーの フィールドバスと SoftPLC
を選択し、概要サブタブを選択します。フィールドバスの設定で、ドロップダウンメニューから [フィールドバスの種類] を選択します。
送受信の両方向のフレームサイズ 全体のサイズをバイトで入力します。値は偶数の整数で指定します。
フィールドバスタイプに特定のパラメーターを入力します。
関連情報
本セクション内
フィールドバスパラメータ一般
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスタイプ | ドロップダウンメニューからフィールドバスタイプを選択します:
| 未定義 |
更新間隔 | プロセスデータフレームが送信される頻度を設定します。値はミリ秒で表されます。最小値は 100 ミリ秒です。 |
|
フィールドバスがオフラインの場合はツールをロック | 選択スイッチのオン-オフ。フィールドバスモジュールでフィールドバスマスター (PLC) との通信が切断されると、コントローラによって行われる動作を決定します。 | オフ |
結果応答確認の読み取り | 選択スイッチのオン-オフ。オンにすると設定はすべての仮想ステーションに影響します。信号の結果応答確認の読み取りは、フィールドバス構成にマッピングされる必要があります。 確認する結果なしの場合の結果は、PLC に直ちに送信されます。 確認する結果はキューに入れられ、確認されるとクリアされ、キューの次の結果が送信されます。結果がクリアされてからキューの次の結果までの時間は、一般フィールドバス設定で設定されたフィールドバスのサイクル時間によって異なります。設定が変更されるか、仮想ステーションのフィールドバスマッピングが変更されると、キューにある結果はフラッシュされ、PLC には送信されません。 | オフ |
ネットワークで設定 | 選択スイッチのオン-オフ。フィールドバスモジュール通信の構成方法を決定します。
| オフ |
選択したタスクで同期 | オフ | |
バイト順の周期データ | 周期データに使用するバイトの順序を選択します。
| ネットワークで設定 |
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
ProfinetIOおよびProfinetIO M40のフィールドバスパラメータ
以下の表は、ProfinetIOの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
デバイス名 | デバイスの名称 | |
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
ゲートウェイ | 0.0.0.0 の形式です。 |
|
ADIの最大サイズ | M40では無効です。 最大値として設定するさまざまなアプリケーションデータのインスタンスサイズから選択します。 データの整合性は、単一のADIにマップされたデータに対してのみ保証されます。つまり、送信されるデータが大きい場合、または2つのADIに分割された場合、データの整合性は保証されません。送信されたデータタイプのサイズと等しい最大ADIサイズを設定し、合計フレームサイズに正しくマッピングすると、データの整合性が保証されます。 周期データの送信に使用する最大データサイズ。フィールドバスマスターで使用されるデータサイズと一致する必要があります。最大ADIサイズは、そのサイズ未満のADIがマップに残るようになるまで使用されます。たとえば、最大ADIサイズが8バイトに設定されている場合、8バイト未満になるまでそのサイズがマッピングに使用され、残りのデータの転送には4、2、1バイトが使用されます。 |
デバイス名のパラメータは PROFINET のフィールドバスモジュールを識別し、RFC 5890 で説明されている構文を使用します。
イーサネット/IP およびイーサネット/IP M40 のフィールドバスパラメータ
以下の表は、EtherNet/IPの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
ゲートウェイ | 0.0.0.0 の形式です。 |
|
DeviceNet のフィールドバスパラメータ
以下の表は、DeviceNetの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノードアドレス |
|
|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 125 kbps、250 kbps、500 kbps、自動。 | 自動 |
接続モード | フィールドバスマスター (PLC) と下位コントローラ間の通信の種類を選択します。ドロップダウンメニューから選択します。
| ポーリング済み |
Profibus のフィールドバスパラメータ
以下の表は、Profibusの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
選択したタスクで同期 | 有効な場合、フィールドバスフレームはタスクの変更時に再同期されます。 | |
拡張モード | 下位互換性のある152バイトのデータモードと368バイトのデータモードのどちらかを選択します:
| |
フィールドバスノードアドレス |
|
|
ADIの最大サイズ | M40では無効です。 最大値として設定するさまざまなアプリケーションデータのインスタンスサイズから選択します。 データの整合性は、単一のADIにマップされたデータに対してのみ保証されます。つまり、送信されるデータが大きい場合、または2つのADIに分割された場合、データの整合性は保証されません。送信されたデータタイプのサイズと等しい最大ADIサイズを設定し、合計フレームサイズに正しくマッピングすると、データの整合性が保証されます。 周期データの送信に使用する最大データサイズ。フィールドバスマスターで使用されるデータサイズと一致する必要があります。最大ADIサイズは、そのサイズ未満のADIがマップに残るようになるまで使用されます。たとえば、最大ADIサイズが8バイトに設定されている場合、8バイト未満になるまでそのサイズがマッピングに使用され、残りのデータの転送には4、2、1バイトが使用されます。 |
CC リンクのフィールドバスパラメータ
以下の表は、CC Linkの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 156 キロビット/秒、625 キロビット/秒、2500 キロビット/秒、5 メガビット/秒、10 メガビット/秒。 | 156 キロビット/秒 |
フィールドバスノードアドレス | ネットワーク内の各ユニット別の固有アドレス | |
バージョン | バージョン 1: 既定では、マッピングされたプロセスデータに基づいて、必要な占有ステーション数が自動的に計算されます。 バージョン 2: CC-Linkにネットワーク設定を実装することで、CC-Linkバージョン2の実装をカスタマイズし、拡張サイクルを通じてより大きなデータサイズを使用することができます。 | |
使用中のステーション | どのバージョンが選択されているかによって異なるパラメータ設定。これは、[拡張サイクル] パラメータと組み合わせて使用します。 | |
延長サイクル | 大きなデータサイズの送信に使用されるパラメータ設定。バージョンパラメータおよび使用中ステーションパラメータと組み合わせて使用されます。 |
CC Link IEのフィールドバスパラメータ
以下の表は、 CC Link IEの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ステーション番号 | ネットワーク上の各デバイスには、一意のステーション番号を割り当てる必要があります。 | |
ネットワーク番号 | ネットワークは、アドレス指定に使用される一意のネットワーク番号を持つ複数の部分に分割できます。 |
SoftPLC設定
サイズ
PLCのフィールドバスに割り当てられた受信および送信のサイズは、[送信先コントローラ]および[送信元コントローラ] のフィールドで設定できます。
PLCのフィールドバスが構成されていない場合、フレームサイズは受信サイズと送信サイズの両方で0と表示されます。
オフセット
フィールドバスマップ同士の順序は手動で変更でき、 フィールドバスマップ同士の間隔も制御できます。この 2 つの両方の機能は、オフセットパラメータで制御されます。この値は、プロセスデータフレーム配列のフィールドバスマップの開始位置を定義します。
本セクション内
オフセットの変更
送信先コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
送信元コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
検証は自動的に行われます。新しいオフセット値が受け付けられると、黒のテキストで表示されます。値が受け付けられない場合は、エラーメッセージが赤のテキストで表示され、違反したオフセット規則に関する情報が示されます。
開始アドレスは偶数で指定します。
フィールドバス仮想ステーションマッピング構成
コントローラの仮想ステーションとフィールドバスマスターは、相互にフィールドバスマップを交換して通信します。
1 つ以上のフィールドバスマップがプロセスデータフレームに組み合わされ、コントローラとフィールドバスマスター間の物理通信リンクに送信されます。
列 | 機能 |
|---|---|
チェックボックス | マッピングの選択または選択解除。 |
仮想ステーション | 仮想ステーションの名前。 |
フィールドバス構成 | フィールドバスマップ。 |
コントローラーオフセット 送信先/送信元 | プロセスデータフレーム内のフィールドバスマップの開始点。 |
関連情報
仮想ステーションに割り当てられたフィールドバスマップの表示
フィールドバスマップの仮想ステーションへの割り当て方法を表示するには:
プラント構造ワークスペース
でコントローラーを選択します。 フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。
フィールドバス仮想ステーションマッピング構成メニューに、フィールドバスマップのリストと、割り当てられている仮想ステーションが表示されます。コントローラーオフセット送信先列は、フィールドバスマップが開始されるプロセスデータフレームのアドレスをポイントします。
仮想ステーションへのフィールドバスマップの割り当て
フィールドバスマップを仮想ステーションに割り当てて、それを次のプロセスデータフレームに配置します:
プラント構造ワークスペース
でコントローラーを選択します。 フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。フィールドバス仮想ステーションマッピング構成 メニューで 追加 を選択します。
フィールドバスマッピングの追加ダイアログウィンドウが開きます。
仮想ステーションを選択します。
フィールドバス構成を選択します。
追加を選択すると、ダイアログウィンドウが閉じ、構成が追加されます。
ステップ 3 ~ 6 を必要な回数だけ繰り返します。
フィールドバスマップは、仮想ステーションに割り当てられた順番、またはフィールドバスマップが入る最下位の入力ポイントで、プロセスデータフレームに配置されます。
フィールドバスマップでの項目の自動配置
項目はフィールドバスマップに自動的に配置されます。フィールドバスウィンドウを編集して、後で順序を変更できます。
次の方法が使用されます。
項目は、フィールドバスと SoftPLC
のフィールドバス仮想ステーションマッピング構成メニューにあるフィールドバスマップに追加された順番に配置されます。項目は、バイト、ビット、長さの位置に対して、最下位の場所に配置されます。
項目が既存の項目の間に収まらない場合は、配列内の次の空き位置に試行されます。
項目がフィールドバスマップから削除されると、ギャップができる。新しい項目が追加されると、配置アルゴリズムはその穴埋めを試行します。
ToolsTalk 2 が配置規則の違反を検出した場合。エラーインジケーター
が表示され、エラーの場所を示す。エラーインジケーターの上にマウスカーソルを合わせると、規則違反に関する詳細情報が表示されます。
プロセスデータフレームにおけるフィールドバスマップの自動配置
フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに自動的に配置されます。フィールドバスと SoftPLC タブのフィールドバス仮想ステーションマッピング構成メニューでオフセット位置を編集すると、後で順序を変更できます。
次の方法が使用されます。
フィールドバスマップは、プロセスデータフレームに割り当てられた順序で配置されます。
各マップは、フレームの最初からのオフセット値で開始します。
マップは、前のマップのすぐ上、または最初のマップのオフセット 0 の、最下位の場所に配置されます。
マップがプロセスデータフレームから削除されると、ギャップができます。新しいマップが仮想ステーションに割り当てられると、配置規則がそのギャップを埋めようとします。
マップが既存のマップの間に収まらない場合、配列内の次の空き位置が試行されます。
オフセット値は、設定ウィンドウで手動で変更できます。フィールドバスマップが重ならないように気を付けてください。
ToolsTalk 2 が配置規則の違反を検出すると、エラーインジケーター がオフセットパラメーターの横に表示されます。これは、マップが重なっているか、マップが境界の外にあることを示します。オフセット値を変更して修正できます。
A | オフセット = 0 のプロセスデータフレームの最初のフィールドバスマップの開始位置 |
B | PDF の最初からのオフセットで表される、プロセスデータフレームのフィールドバスマップの開始位置 |
C | フィールドバスマップのサイズ |
D | フィールドバスマップ |
E | プロセスデータフレームのサイズ |
F | エラーの例: 青のマップが、「緑」のマップの開始位置に重なっている |
G | マップサイズ |
H | 「青」のマップの開始位置 |
J | プロセスデータフレーム |
K | オフセットアドレスが 0 の、プロセスデータフレームの最初のマップ |
フィールドバスの概要
フィールドバス通信を使用する一般的な工場管理制御システムがコントローラと通信する場合、次のようになります。
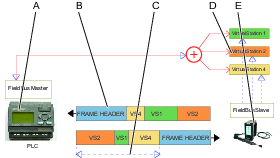
A | フィールドバスマスター (PLC) | B | フレームの見出し |
C | プロセスデータフレーム内の複数の仮想ステーションとのユーザーデータの送受信 | D | 仮想ステーション |
E | 複数の仮想ステーションを持つコントローラ |
通常 PLC であるフィールドバスマスターは、フィールドバス下位と呼ばれる多数のリモートノードと情報を交換します。マスターは、一度に 1 つの下位と通信します。マスターは下位にフレームを送信し、応答として別のフレームを受信します。
PLCはAnybusモジュールにデータを送信し、コントローラと通信します。コントローラには、識別データ、タスク選択情報、その他の信号が含まれます。
コントローラは、イベント信号、ステータス信号、締め付け結果、その他の信号を含む可能性のあるAnybusモジュールを介してPLCに応答を送信します。
プロセスデータの更新頻度は異なる場合があります。コントローラとAnybusモジュール間の更新周波数は約100Hzであり、AnybusモジュールとPLC間の更新周波数は約500Hzです。
物理的な伝送リンクは、選択されたフィールドバスタイプによって異なります。伝送は、アドレス情報を含むフレームの見出しと、すべてのデータを含むプロセスデータフレームで構成されます。
コントローラが仮想ステーションをサポートする場合、正しい情報を各仮想ステーションに指定することが重要です。プロセスデータフレームには、1 つ以上のフィールドバスマップ (各仮想ステーションに 1 つ) を含むことができます。
本セクション内
フィールドバス構成パラメータ
最下位ビットの位置を定義することで、項目はフィールドバスマップに配置されます。この位置はバイト番号とビット番号で識別されます。
情報 | 説明 |
|---|---|
開始バイト | 項目の最下位バイトがあるバイト番号。0 から、サイズマイナス1の数の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
開始ビット | 項目の最下位ビットが配置されているビット番号。前に選択された開始バイトから始まります。0 から 7 の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
長さ | 項目のビット数を表す数値。 |
範囲 | 情報のみ。選択した項目の最小の長さ、最大の長さ、デフォルトの長さの情報を示します。 |
コンバーター | 使用可能な信号コンバータのドロップダウンリスト。デジタル形式での項目の表示方法について、SoftPLC に要件がある場合に使用されます。 |
項目コンバーターは、異なるデータ型に項目を変換するのに使用されます。
情報 | 説明 |
|---|---|
ブール値反転 | 有効高 (1) から有効低 (0) にデジタル信号を反転させます。 |
固定小数点 |
|
フィールドバスの定義
項目はデジタル信号です。コトンローラの参照セクションでの説明どおり、信号などになります。
締め付け OK などの情報の信号ビット。
イベントコードなどの情報の数ビット。
項目は、コンバーター値、識別番号、締め付け結果を表す情報の数ビットになります。
項目は文字による文字列で指定できます。
情報 | 説明 |
|---|---|
フィールドバス項目 | ブール値: 信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
整数: データは配列のデータの 1 ビット以上を占めます。 | |
文字または文字列: 信号は、英数字の文字による文字列で、1 バイト以上の位置を占めることができます。 |
情報 | 説明 |
|---|---|
フィールドバスマップ | データの配列。サイズはバイトの偶数で指定してください。フィールドバスマップは、フィールドバスメニューのフィールドバスウィンドウで作成されます。フィールドバス項目はフィールドバスマップに配置され、マスターと下位間の通信用の一意な配列を作成します。項目は、開始位置と長さをビット数で表して定義することによって配列に配置されます。 |
プロセスデータフレーム | データの配列。サイズは偶数のバイトで指定してください。プロセスデータフレームは、フィールドバスメニューのフィールドバス ウィンドウで作成されます。フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに配置されます。フレーム内のマップの位置は、オフセットで定義され、フレームの最初から計算されます。 |
フィールドバス構成 | フィールドバスマッピング構成は、フィールドバス メニューのフィールドバス ウィンドウで行われます。構成パラメータは一般的なパラメータとタイプ特有のパラメータの両方で構成されます。 パラメータ入力ボックスのリストは、フィールドバスタイプが選択されてから表示されます。 |
情報 | 説明 |
|---|---|
オフセット | ポインター変数。信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
開始バイト | ポインター変数。項目の LSB を含むフィールドバスマップ内のバイトを指します。 |
開始ビット | ポインター変数。項目の LSB を含むフィールドバスマップ内の以前に定義されたバイトのビットを指します。 |
項目の長さ | ビット数で表すサイズ変数。 |
LSB | 最下位のビットまたはバイト。 |
名前 | 説明 |
|---|---|
フィールドバスの送信 | ネットワーク上で送信されるデータグラム。送信ノードは、アドレス情報を含むフレームの見出しを、ネットワークに送信されるプロセスデータフレームに組み合わせます。受信ノードは、フレームの見出しでそのアドレスを検出し、プロセスデータフレームを取得します。 |
フレームヘッダー | ネットワークでエラーのない送信を行うためのネットワークアドレス情報とその他のデータ |
フィールドバスマスター | 通常、フィールドバスの下位への通信を開始する PLC です。マスターはデータフレームを送信し、下位から別のフレームを受信します。 |
フィールドバスの下位 | フィールドバスマスターから送信に応答するリモートノード。下位が送信を検出すると、フレームを受信し、送信元への返信で別のフレームを送信して応答します。 |
フィールドバスの要件
フィールドバス通信を正しく行うには、次のインストールと構成を行う必要があります。これは、フィールドバス と SoftPLC
タブで行われます。
フィールドバスモジュールがコントローラーにインストールされています。
概要サブタブのメニューに設定される共通フィールドバスパラメーター。
信号の構成は、フィールドバスサブタブで作成され、その後、概要サブタブのフィールドバス仮想ステーションマッピング構成メニューにマッピングされます。
フィールドバスサブタブにある信号構成メニューのフィールドバスマップにマッピングされた項目。
フィールドバスと SoftPLC
タブのメニューで、仮想ステーションに割り当てられ、プロセスデータフレームに配置されるフィールドバスマップ。
SoftPLCの概要
SoftPLC は、コントローラーの動作をカスタマイズしたり、フィールドバスデータを送受信したり、外部 SoftPLC との間で I/O 信号を交換したりするために使用されます。外部 SoftPLC は、組立ライン上の機械の制御に使用されます。構成とプログラミングは、ToolsTalk 2 と統合された MultiProg と呼ばれるサードパーティのソフトウェアを介して行われますが、独自のプロセスで実行されます。SoftPLC はフィールドバスと SoftPLC タブ にあり、ライセンスまたは機能ごとに、この機能をサポートしているコントローラーに表示されます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
関連情報
SoftPLC要件
外部 SoftPLC 構成プログラム MULTIPROG 5.51 は、ToolsTalk 2 クライアントと同じコンピューターにインストールする必要があります。
SoftPLC プログラムを実行するには、一般 SoftPLC 設定をオンに設定する必要があります。オンの場合、SoftPLC ステータス列に実行中または停止済みステータスが示されます。実行モードでは、SoftPLC プロセスは有効で、Multiprog から SoftPLC プログラムを開始または停止する準備ができています。実行中の SoftPLC プログラムは、その値を 100 ミリ秒ごとに更新します。
SoftPLC を介したフィールドバスが使用される場合:
SoftPLC 信号の入出力信号のバイト割り当ては、SoftPLC 設定 セクションで行うことができます。これは、フィールドバスと SoftPLCタブの 概要サブタブにあります。
コントローラーに対して SoftPLC プロジェクトが既に存在する場合は、 フィールドバスと SoftPLC タブを選択し、続いてSoftPLC サブタブを選択します。プロジェクト領域で、開くを選択して Multiprog を開きます。[更新] ボタンを選択して、フィールドバス内の SoftPLC フレームサイズ を更新します。Multiprog で更新されるフィールドバス設定を表示するには、これを行います。
Multiprog
Multiprog は実際の SoftPLC プログラムが作成・編集されるアプリケーションです。コントローラーに最初のプロジェクトを作成する際、コントローラーの現在のセットアップとその機能に応じて、変数と機能ブロックが作成されます。テンプレートは、さらに調整が可能な基本的な提示として使用できます。
フィールドバス構成タブ
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。[フィールドバス] サブタブを選択して、マップのリストを表示するか、新しいフィールドバスマップを作成します。
列 | 説明 |
|---|---|
| チェックボックス。 |
名称 | 名前:マップの名前を示します。名前は受信マップと送信マップで同一です。 |
送信先サイズ | 仮想ステーションに受信するマップのサイズ。値は偶数のバイト数である必要があります。 |
送信元サイズ | 仮想ステーションから送信するマップのサイズ。値は偶数のバイト数である必要があります。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
最終変更 | ToolsTalk 2 時間で表される最終変更が行われた時刻。 |
変更者 | 最後に変更した人。 |
コントローラー更新 | コントローラー時間で表したコントローラー更新。 |
コントローラー更新者 | コントローラーを更新したのが誰かを知るには。 |
本セクション内
新しいフィールドバスマップの作成
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
追加を選択して新しいフィールドバス設定を作成するか、ダブルクリックして既存のフィールドバス設定を編集します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
新規タブを選択します。
構成に名前を付けます。
送信先サイズコントローラーパラメーターを入力します。これは、バイト数で示される、仮想ステーションに受信するデータフレームのサイズです。値は偶数で指定します。
送信元サイズコントローラーパラメーターを入力します。これは、バイト数で示される、仮想ステーションから送信するデータフレームのサイズです。値は偶数で指定します。
送信フレームと受信フレームはサイズが異なる場合があります。
セットアップに項目を追加して構成を続行するには、追加を選択します。
入力されたマップサイズは、プロセスデータフレームより大きくできません。
フィールドバスマップのインポート
以前にエクスポートしたフィールドバスマップをテンプレートとして再利用し、コントローラーにインポートすることができます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
[追加]を選択します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
既存のマップを再利用するには、インポート タブを選択します。
ファイルを開く コマンドボタンを選択して、ブラウザウィンドウを開きます。
ファイルを選択します。ファイルの種類は JSON ファイルである必要があります。(*.json).
[開く] を選択します。ブラウザウィンドウが閉じます。
追加を選択してファイルをインポートします。この操作によってポップアップウィンドウが閉じ、マップのリストが更新されます。
フィールドバスマップの削除
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
削除する各フィールドバスマップで、フィールドバスワークスペースの左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンリストから 削除 を選択します。
マップのリストが更新されます。
フィールドバス信号構成を作成するには
この領域では、コントローラーから、またはコントローラーへの新しいフィールドバス信号構成を作成できます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
マップの名前をダブルクリックして表示するか、 追加を選択して新しいマップを作成します。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブを選択します。
[追加]を選択します。
信号構成の作成ダイアログウィンドウが開きます。
リストで項目名を選択して、項目を選択します。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を設定します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
ドロップダウンメニューからオプションのコンバーター値を選択します。
[追加]を選択します。
追加する項目すべてにステップ 6 ~ 11 を繰り返します。
閉じるを選択して追加の操作を終了し、ダイアログウィンドウを閉じます。
項目がマップに手動で配置されない場合、ToolsTalk 2 は項目を最下位位置に配置しようとします。後でマップ内で項目を移動することができます。
フィールドバスマップの項目の編集または表示
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブのいずれかを選択します。
フィールドバス構成メニューのマップ表で項目名をダブルクリックします。
項目の編集ダイアログボックスが開きます。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を編集します。
最下位ビットのある場所のビットを入力して、項目の開始位置を編集します。
項目の長さをビット数で編集します。
オプションのコンバーター値をドロップダウンメニューから編集します。
OK を選択して変更を確認し、ダイアログウィンドウを閉じます。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップからの項目削除
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブを選択します。
マップから削除する各項目について、フィールドバス構成メニューの項目表の左端にあるチェックボックス
を選択します。削除を選択します。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップのエクスポート
フィールドバスマップは、仮想ステーションとリモートの場所の間で使用される通信フレームに信号項目を配置する方法を定義します。このマップはテンプレートとしてエクスポートでき、別のコントローラーにインポートし、再利用できます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、ワークスペースとマップのリストを表示します。
フィールドバス ワークスペースの左端の列で、エクスポートするフィールドバスマップのチェックボックス
をオンにし、[管理]を選択し、ドロップダウンリストから[エクスポート]を選択します。目的の場所を参照し、保存を選択します。
マップは、JSON ファイル (*.json) として保存されます。エクスポートされるファイルは、別のコントローラーにインポートできます。
SoftPLC構成タブ
新規SoftPLCプロジェクトの作成
新規作成を選択して、新しい SoftPLC プロジェクトを作成します。このプロジェクトは基本的なテンプレートを開始点として使用します。このテンプレートには、Multiprog で使用可能なすべての機能が含まれます。
作成され、編集されたプロジェクトは、プロジェクトが構築され、文書 > Mp Temp に保存されるとローカルディスクに継続的に保存されます。ToolsTalk 2 SoftPLC の起動時に開くをクリックすると、SoftPLC プロジェクトが ToolsTalk 2 サーバーに保存されていない場合は、この保存されたデータプロジェクトがアップロードされます。その後、編集を続行できます。
新規作成を選択します。Multiprog が自動的に開きます。
Multiprog で SoftPLC プログラムを編集し、ToolsTalk 2 でプロジェクトに名前と説明を指定します。
プロジェクトの仮想ステーションを更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
プロジェクトのフィールドバスフレームサイズを更新を選択してフィールドバスデータを追加します。
フィールドバスのフレームサイズは、SoftPLC とフィールドバスデータを直接送受信できるようにする特殊な SoftPLC 入出力部分を含むように構成する必要があります。
[保存] を選択して、ToolsTalk 2 サーバーに編集したプロジェクトをチェックインします。
変更をコントローラーにプッシュします。
SoftPLC プロジェクトテンプレートのインポート
新しい SoftPLC プロジェクトは既存のプロジェクトテンプレートから作成できます。テンプレートは、さらに調整が可能な基本的な提示として使用できます。選択したプロジェクトテンプレートは、元のプロジェクトを上書きしないように、コピーされます。
プロジェクトのインポートを選択して、既存の SoftPLC プロジェクトを選択します。
Multiprogで SoftPLC プロジェクトを編集します。
プロジェクトの仮想ステーションで更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
フィールドバスの SoftPLC フレームサイズで [更新] を選択して、フィールドバスデータを追加します。
[保存] を選択して、編集したプロジェクトを ToolsTalk 2 サーバーにチェックインします。
変更をコントローラーにプッシュします。
プロジェクト内にまだ含まれていない場合、[プロジェクトの仮想ステーション] で [更新] を選択すると、SoftPLC 仮想ステーションのマッピングが SoftPLC プロジェクトに追加または更新されます。
SoftPLCユーザーデータの作成
SoftPLC は、共有メモリの専用の部分を介してプロトコルアダプターと交信できます。
一般 SOFTPLC 設定フィールドで追加を選択します。
SoftPLC ユーザーデータの作成 ウィンドウのドロップダウンから関連するプロトコルを選択します。
SOFTPLCへ および SOFTPLCから アドレスフィールドに入力します。
[追加]を選択します。
SoftPLC の オンまたはオフを選択します。
オン:SoftPLC プロセスが失われた場合、工具は締め付けを行わないようにロックされます。
オフ:SoftPLC プロセスが失われても、工具は締め付けを実行できます。
SoftPLC 信号構成の作成
アクセサリーと SoftPLC 間の操作は、I/O 信号を交換して行われます。
[SoftPLC 信号構成] フィールドで [追加] を選択すると、このコントローラーに接続されており、サポートされているすべての I/O 信号のリストが表示されます。
関係ない信号をクリアして、SoftPLC 信号構成から除外します (デフォルトではすべての信号が選択されています)。
信号構成リストに名前を付けます。
信号構成を仮想ステーションにマッピングする際、作成された信号構成が、ドロップダウンリストでの選択オプションとして使用可能になります。
信号構成に含まれていない(チェックマークがオンになっていない)信号は、引き続き SoftPLC コンフィギュレーターMultiprogに表示されますが、取り消し線が引かれています。
コントローラー フィールドバス
ToolsTalk 2 バージョン 2.24 では、 コントローラーフィールドバスが導入されました。これはフィールドバスと 1 つの点で異なります。コントローラーフィールドバスはコントローラー全体での使用を目的としており、コントローラー内のすべての仮想ステーションによって共有されます。コントローラーフィールドバスを使用すると、多くの仮想ステーションが同じ受信信号を使用できます。これにより、フィールドバスと比較すると、必要な帯域幅の量が削減されます。
コントローラーフィールドバスには、仮想フィールドバスを使用した信号マッピング機能が組み込まれています。仮想フィールドバスの目的は、個々の信号構成を信号構成の論理グループにマッピングすることです。仮想フィールドバスは、仮想ステーションを信号構成にマッピングするポイントを提供します。信号構成を多数の仮想フィールドバスにマッピングできるため、仮想ステーションが同じ信号構成を共有できます。

本セクション内
コントローラーフィールドバスを使用するための前提条件
コントローラーフィールドバスを使用するには、以下の前提条件を満たす必要があります:
ToolsTalk 2 バージョン 2.24 以降
コントローラーソフトウェアバージョン 3.13 以降
コントローラーフィールドバス構成の作成
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。[追加]を選択します。
新しいフィールドバス構成の作成 ウィンドウが表示されます。
新しいコントローラーフィールドバス構成の名前を入力します。
送信先サイズコントローラー番号を入力します。これは、バイト数で示される、仮想ステーションに受信するデータフレームのサイズです。値は偶数で指定します。
送信元サイズコントローラー番号を入力します。これは、仮想ステーションから送信されるデータフレームのサイズで、バイト数で表示されます。値は偶数で指定します。
[追加]を選択します。
新しいコントローラーフィールドバス構成が作成され、表示されます。
コントローラーフィールドバスで信号構成を作成する
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。コントローラーフィールドバス インスタンスを選択します。
コントローラーフィールドバスに信号構成を追加するには、追加...を選択します。
信号構成の作成 ウィンドウが表示されます。
信号を選択します。
信号構成のバイト、ビット、および長さのデータを入力します。
[追加]を選択します。
[閉じる]を選択します。
信号構成が作成されました。
このステップでは、信号構成の横に赤い感嘆符が表示されます。これは、信号構成が仮想フィールドバスにまだマッピングされていないためです。
仮想フィールドバスの作成
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。仮想フィールドバスを追加するフィールドバス構成をダブルクリックします。
コントローラーフィールドバスに仮想フィールドバスを追加するには、仮想フィールドバス セクションの追加... を選択します。
仮想フィールドバスの作成 ウィンドウが表示されます。
名前を入力し、物理キーボードで [Tab] キーを選択します。
[追加]を選択します。
[閉じる]を選択します。
仮想フィールドバスが作成されます。
このステップでは、仮想フィールドバスの横に赤い感嘆符が表示されます。これは、信号構成が仮想フィールドバスにまだマッピングされていないためです。
信号構成を 1 つ以上の仮想フィールドバスにマッピングする
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。信号構成のマッピング先となるフィールドバス構成をダブルクリックします。
コントローラーフィールドバスビューで、データフレーム内の信号構成を見つけます。信号構成を右クリックし、[仮想フィールドバスへのマッピング] を選択します。
仮想フィールドバスに信号をマッピング ウィンドウが表示されます。
信号構成をマッピングする仮想フィールドバスを選択します。
[マップ] を選択します。
信号構成は 1 つ以上の仮想フィールドバスにマッピングされます。
[閉じる]を選択します。
コントローラーフィールドバスビューで仮想フィールドバスを選択すると、仮想フィールドバスに接続されている信号構成が表示されます。信号構成は緑色で表示されます。
仮想ステーションを仮想フィールドバスにマッピング
フィールドバスのサイズが、使用するコントローラー フィールドバスを収容するのに十分な大きさであることを確認してください。これらの設定は [サイズ] セクションで構成します。
仮想ステーションを仮想フィールドバスにマッピングするには、仮想ステーションのマッピングモードを多数対 1 に設定する必要があります。
仮想ステーションのマッピングモードを変更すると、既存の仮想ステーションのマッピング構成が削除されます。削除されたマッピングは復元できません。
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。仮想ステーションマッピング構成セクションで 、コントローラーフィールドバス構成を選択します。
コントローラーへのオフセットとコントローラーからのオフセットを入力してフィールドバス配分を計画します。
オフセットはフィールドバス分布セクションにグラフィカルに表示されます。
マッピングセクションで、追加...を選択します。
仮想ステーションを選択します。
仮想フィールドバスを選択します。
[追加]を選択します。
[閉じる]を選択します。
フィールドバスマッピングは、概要サブタブと仮想ステーションタブの両方に表示されます。仮想ステーションタブを選択し、フィールドバスマッピングセクションのマッピングを確認します。
[設定] タブの操作
プリファレンス
設定メニューにはプリファレンスセクションが含まれ、コントローラインターフェースの言語、トルク単位、PIN による保護の選択に使用できます。
コントローラプリファレンスを設定するには:
プラント構造
でコントローラを選択します。 設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
コントローラプリファレンスのパラメータ:
パラメータ | 説明 | 既定 |
|---|---|---|
Torque unit (トルクの単位) | コントローラの GUI または Web GUI でこのコントローラに表示されるトルク測定結果の単位を選択します。 | Nm |
Temperature unit (温度の単位) | コントローラの GUI または Web GUI でこのコントローラに表示される温度測定結果の単位を選択します。 | 摂氏 |
言語 | コントローラGUIおよびWeb GUIでコントローラの表示言語を選択します。 | 英語 |
起動画面 | システム起動時のコントローラ起動画面を選択します。 | ホーム画面 |
工場出荷時ポート経由でのアクセス | オン/オフ。コントローラとの通信の有効化 (オン) または無効化 (オフ)。 | オン |
PIN の使用 | コントローラの GUI または WebHMI(工場ネットワーク)からアクセスすると、このコントローラの PIN を有効にできます。 PINは、GUIまたはWebHMIを介してコントローラにアクセスするユーザーにのみ適用されます。PINが有効化されているため、ユーザーは、ToolsTalk 2からロックアウトされたり、またはToolsTalk 2のコントローラの構成作業(構成および構成のプッシュ)からロックアウトされることはありません。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。 | オフ |
サービスポートにPINを使用 | PINは、サービスポートを介してアクセスする際にコントローラで有効化することができます。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。
| オフ |
PIN コード | 追加する各ユーザーをに、4 桁の PIN コードを選択します。ユーザー PIN の有効化/無効化。 | |
アイドル時間タイムアウト | コントローラ GUI または Web GUI が、アイドル時間タイムアウト後に自動的にロックされます。最小値は20秒です。 | 120 秒 |
[PINを使用]が[オフ]に設定されている場合でも、PINコードとアイドル時間タイムアウトは編集に対して有効になっています。
関連情報
本セクション内
PIN 設定
PIN を使うことで、コントローラの不正利用や偶発的な変更を防ぐことができます。コントローラに1つまたは複数の異なるPIN構成を設定することができます。構成方法の1つに、ToolsTalk 2ソフトウェアを使用する方法があります。ユーザーは、1つまたは複数のPIN構成を同時に有効化するかどうかを決定できます。コントローラ には最大 10 人のユーザーを追加でき、それぞれには独自の PIN が割り当てられます。
各PIN構成には、PINコード、ユーザー名、ユーザー/ PINを有効または無効にするためのスイッチ、およびユーザーがアクセスできる使用可能な構成のリストがあります。
PINが有効化されており、画面がロックされている場合、GUIの右上隅にロックされたた南京錠のアイコンが表示されます。ユーザーは、選択された構成にのみPINコードを入力せずにアクセスして変更を加えることができます。また、選択されていない構成は、読み取り専用アクセスのみで参照できます。選択されていない構成はグレー表示されるか、無効になります。
画面ロックは、一定時間操作がないと自動的にオンになり、この時間はユーザーが構成できます。
アイドル時間の最小値は20秒で、最大値は600秒です。アイドル時間は構成可能で、すべてのPIN構成に適用されます。
システムの起動後、現在のアイドル時間に関係なく、PINがオンの場合、コントローラはロックされます。
PIN が有効になると、次を介して コントローラにアクセスする際にPIN コードが 要となります:
コントローラ GUI から
Web GUI から
PIN の構成
設定メニューで、PIN の使用をオンにします。
[PINコード(暗証番号)] を選択します。
新規ユーザーのPINコードを追加する
[PINコード]ダイアログウィンドウで[追加]を選択します。
名前フィールドにユーザー名を入力します。
[PINの設定]フィールドにPINを入力して、ユーザーのPINを設定し、[PINの繰り返し]フィールドに同じPINを繰り返し入力ます。PIN は 0000~9999 の範囲の4桁の数字でなければなりません。
両方のフィールドの PIN ([PINの設定] と [PINの繰り返し]) が一致している必要があります。
[有効]チェックボックス
をオンにしてそのユーザーのPINコードを有効にします。 PIN が有効になると、構成したアイドル時間の後にコントローラが自動的にロックされます。
PINを無効にするには、そのユーザーの[有効]チェックボックスをオフにします。
ユーザー / PIN の削除
ユーザーのリストで、削除する各ユーザー PIN のチェックボックスをマークして、削除ボタンを選択します。
コントローラのユーザーアクセス設定
特定のユーザに対する、コントローラのさまざまな機能に対して、有効なPINコードを設定することができます。
[ユーザーグループの編集]を選択して、そのユーザーのさまざまな機能のPINコードを構成します。
[コントローラーユーザーアクセスの設定]ウィンドウが開き、最上位のセクション(フォルダー形式)には、それに関連するすべての機能が含まれています。下向き矢印を選択して展開すると、そのセクションで使用できるすべての機能が表示されます。
読み取り専用アクセスは全ユーザーに対して、機能とプログラムのすべてにデフォルトで割り当てられます。
ユーザーにアクセスを提供する必要がある機能で[作成と削除]列の下にあるチェックボックス
を選択します。 [作成と削除] は、ユーザーに完全な書き込みアクセスを提供します。
最上位のフォルダーにあるチェックボックス
を選択した場合、そのフォルダー内のすべての機能も選択されます。特定の機能の選択を解除するには、チェックボックスを展開してオフにします。フォルダ内のすべての機能が選択されていない場合、チェックボックスには「X」の印の代わりにダッシュ(-)が表示されます。保存 を選択します。
[押す]
はPIN構成を有効にするためのコントローラーを変更します。
異なる権限を持つ新しいユーザーがコントローラーGUIに追加された場合、新しいユーザーは[PINコード]ダイアログウィンドウにも表示されます。そのユーザーのアクセス権を表示または変更するには、[ユーザーグループの編集]を選択します。
PIN でロックされている場合のコントローラへのアクセス
有効な PIN でコントローラーにアクセスすると、PIN を求めるプロンプトが表示されます。これは、Web GUI またはコントローラ GUI を介してコントローラにアクセスする場合です。
ステーションセットアップのPINコード
ステーションセットアップアプリケーションにおいて、コントローラーでPINが有効になっている場合、そのコントローラーのToolsTalk 2ソフトウェアにアクセスする際はPINコードを入力する必要があります。PINが有効になっているコントローラーにユーザーがアクセスしようとすると、PINコードを要求するダイアログウィンドウが表示されます。
[PINの入力(コントローラーPIN)]ダイアログウィンドウにPINを入力します。
PINが認証されると、ユーザーは有効なすべての構成にアクセスできます。ただし、現在のセッションからログオフした場合、PINを再度入力する必要があります。
ツールサービスアラーム
設定メニューには、サービスインジケーターアラーム、サービスアラーム後のツールロック、校正アラーム表示にツールアラームを選択するのに使用されるツールセクションがあります。
ツールアラームの設定
プラント構造
でコントローラを選択します。 設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
パラメータ | 説明 | デフォルト | 位置 |
|---|---|---|---|
点検インジケータアラーム | スイッチで選択されます。 アラームをオン、またはオフにします。サービス間隔に達するとアラームがトリガされます。 | オフ | |
サービス アラーム後にツールロック | スイッチで選択されます。 サービス間隔に達したときにツールをロックします。 | オフ | |
校正アラームの表示 | スイッチで選択されます。 指定期間内にツールが校正されていない場合校正アラームがトリガされます。最終校正日はツールメニューで確認できます。デフォルト設定の間隔は 1 年ですが、コントローラ GUI または Web GUI から変更可能です。 | オフ | |
オイルレベル監視の有効化 | オフ | ||
オイルレベル空警告のロックオン | オフ |
サーバー接続
ライセンスサーバーとのコントローラー通信
機能は、機能管理システムからコントローラに一時的または永久に追加できます。追加された機能は、ライセンスサーバーで管理されます。コントローラ GUI、Web GUI、または ToolsTalk 2 GUI からアクセスできます。
サーバーへのアドレスを構成する必要があり、それはコントローラの設定 から行います。
コントローラとライセンスサーバー間の通信を設定するには:
プラント構造
でコントローラを選択します。[設定
]タブに移動します。ワークスペースエリアに設定メニューが表示されます。
ライセンスサーバーメニューで、該当する位置のスイッチを設定して通信を有効化または無効化します。
通信が有効になっている場合は、サーバーのホストアドレスを設定します。
通信が有効になっている場合は、サーバーのポート番号を設定します。
同期ボタンをクリックして、コントローラとライセンスサーバー間の機能管理を同期します。
パラメータ | 説明 | 既定 | コメント |
|---|---|---|---|
ライセンスサーバー有効 | ライセンスサーバーとの通信を有効または無効にします。 | オフ | |
サーバーホスト | サーバーの IP アドレス。 | ||
サーバーポート | サーバーのポート番号。 | ||
同期 | コマンドボタン。 ライセンスをライセンスサーバーと同期します。 | 通信が有効な場合に表示されます。 |
「同期」コマンドは、コントローラとライセンスサーバー間の同期を強制します。通常、コントローラがサーバと正常に通信している場合、同期は定期的に自動的に行われます。同期が定期的に行われない場合、コマンドボタンを使用できます。
関連情報
ToolsNet サーバーとのコントローラの通信
コントローラは常に締め付け結果をToolsTalk 2に送信します。コントローラは、さらに処理を行うために、ToolsNet に結果を送信することもできます。ToolsNet 8サーバに対するアドレスは、コントローラで構成する必要があります。
コントローラと ToolsNet サーバー間の通信を設定するには:
プラント構造
でコントローラを選択します。設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
ToolsNet に移動して、ToolsNet サーバーとの通信を有効または無効にします。
通信を有効にする場合、サーバーの IP アドレスとポート番号を設定します。
パラメータ | 説明 | デフォルト | コメント |
|---|---|---|---|
ToolsNet が有効です | サーバーとの通信を有効/無効にします | オフ | |
サーバーホスト | ToolsNet サーバーの IP アドレス。 |
| 通信は有効化されています。 |
サーバーポート | ToolsNet サーバーポート。 |
| 通信は有効化されています。 |
関連情報
リモートロギング接続の構成
コントローラーをリモートロギングサーバーに接続するには、コントローラーでリモートロギング設定を構成してアクティブにします。
プラント構造
でコントローラを選択します。設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
リモートロギング セクションで、次のパラメータを構成します。
フィールド
説明
オン/オフ
リモートロギングサーバーとの通信を有効/無効にします。
プロトコル
TCP または UDP プロトコルを選択します
サーバーホスト
リモートロギングサーバの IP アドレス
サーバーポート
リモートロギングサーバーポート
各施設に適切なログレベルを選択します。
ログレベル
SysLog 分類
Error(エラー)
アラート、クリティカル、非常、エラー
警告
警告
情報
情報、通知
[設定] を選択して、コントローラーに構成を適用します 。
コントローラの日時
各コントローラは、正確なレポート作成のためにその時刻と日付がプログラムされている必要があります。
プラント構造ワークスペース
でコントローラを選択します。[設定
]タブに移動します。ワークスペースエリアには、一般設定メニューが表示されます。
時間参照のソースを選択します。
選択した時間ソースに応じて、追加のパラメータを入力します。
タイムゾーンショートカットメニューから、コントローラのローカルタイムゾーンを選択します。
時間を最も正確にし、安定させるため、すべてのコントローラと通信できる NTP サーバーの使用を推奨します。
時間ソースはショートカットメニューから選択され、次のいずれかにできます。
コントローラに日時を手動で入力。これはすべての GUI インターフェースから可能です。
標準化されているネットワークタイムプロトコル (NTP) の使用。接続されているコントローラへのサーバー配信時間参照。2 つまでの異なる NTP サーバーに構成できます。
コントローラが接続され、ToolsNet サーバーにオンラインの場合の、時間参照としての ToolsNet サーバーの使用。ToolsNet を時間参照として使用する場合、サーバーとコントローラが異なるタイムゾーンにあっても、同じタイムゾーンに設定されていることが重要です。
日付と時間を追加して構成するには:
パラメータ | 状態 | 説明 |
|---|---|---|
ソース | ショートカットメニューから選択します。 コントローラの時間と日付を構成する方法を選択します。 | |
タイムゾーン | ショートカットメニューから選択します。 コントローラのあるタイムゾーンを選択します。 | |
Time (時間) | ソース = 手動 | 時間:分:秒の形式で時間を入力します。 |
Date (日付) | ソース = 手動 | カレンダーの記号から日付を入力します。 |
設定コマンドボタン | ソース = 手動 | 入力された日時をコントローラに送信します。このコマンドを実行するには、コントローラがオンラインである必要があります。 |
追加コマンドボタン | ソース = NTP | 追加 NTP サーバーアドレスを追加します。 |
削除コマンドボタン | ソース = NTP | 選択された NTP サーバーアドレスを削除します。 |
NTP サーバー | ソース = NTP | NTP サーバーの IP アドレスを入力します。 |
イベントメニュー
イベントは、オペレーターに報告されるエラーなど、操作の状態やその他の情報です。すべてのイベントは構成でき、異なる重要度を指定できます。
イベントタイプ | 機能 |
|---|---|
ディスプレイ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示されます。 |
ログ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示され、ログファイルに書き込まれます。これらは [イベント] |
確認 | イベントはオペレーターの確認を得る必要があります。イベントを確認するには、オペレーターはアクセサリーのボタンを押すか、コントローラのタッチ画面をタップするか、Web GUI からイベントを確認する必要があります。 |
イベント構成は、各イベント信号の取り扱い方法を決定します。
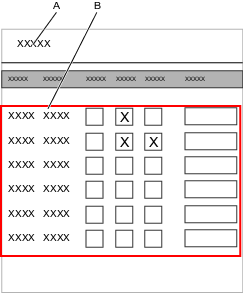
A | イベント検索ウィンドウ | B | イベントリスト |
すべての取得可能イベントはリファレンスの章で一覧にまとめられています。イベントには 2 つのカテゴリがあります。
アトラスコプコが定義する標準イベントは各成果物に取得可能です。
カスタムイベントは顧客要請があった際にアトラスコプコが実施し、特定の顧客に対してのみ有効かつ取得可能になっています。
関連情報
本セクション内
イベント構成
イベントの処理方法を構成するには:
プラント構造ワークスペース
でコントローラを選択します。[設定]
タブに移動し、[イベント] を選択します。検索ウィンドウを使用して特定のイベントを検索するか、セクションを選択して展開し、イベントをスクロールして目的のイベントコードを見つけます。
次の 1 つまたは複数を選択または選択解除します。
イベントが表示され、オペレーターによって確認されるようにするには、確認。
イベント
 が表示され、ログファイルに書き込まれるようにするには、ログ。
が表示され、ログファイルに書き込まれるようにするには、ログ。
イベントが画面に表示されるようにするには、表示。
詳細フィールドは、コメントを書き込むのに使用できます。
準備が完了したら、変更を特定のコントローラにプッシュ配信します。
構成する各コントローラーごとにステップの 3 - 5 を繰り返します。
イベントコード番号 0000 ~ 7999 は標準イベントです。
イベントコード番号 8000 ~ 9999 は顧客特定のイベントです。
ライブラリへのイベント追加
設定
を選択し、イベント構成タブで 管理を選択します。ドロップダウンリストから ライブラリに追加を選択します。グローバル構成の作成 ダイアログボックスが開き、次の 2 つの構成オプションが表示されます。
自動で元に戻すが規定で設定されています。
リンク解除
作成 を選択すると、イベント設定がロックされ、グローバルイベントライブラリに表示されます。
アクション | 結果 |
|---|---|
自動で元に戻す | ToolsTalk 2でプログラムがグローバルイベントとしてマークされている場合、コントローラーの GUI または Web GUI を使用したイベントの更新は無視されます。 更新が行われ、ToolsTalk 2 に送り返されます。この場合、変更は認識されますが、承認されません。すると当初のグローバルイベントプログラムは、コントローラに即座にプッシュして返送されます。 |
リンク解除 | コントローラ GUI または Web GUI からイベントを更新すると、影響するコントローラのプログラムがグローバルイベントからローカルイベントに変わります。 更新が行われ、ToolsTalk 2 に送信され、変更が認識されます。その結果、イベントはコントローラへの配信リストから即座に削除されます。 |
グローバルイベントがコントローラに配信されるように構成されている場合には、自動で元に戻すことまたはリンク解除を選択する必要があります。後で選択を変更することはできません。
拡張ロギング
ログは自動的に作成および保存できます。これらのログは、ロググループを使用して拡張ロギングを含めるように構成できます。
ロググループのデフォルト設定はオフです。ロググループを有効にするには:
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。ロググループ ウィンドウで、有効にするグループを選択します。
[SET] を選択します。
ロググループのリセット
すべてのロググループをデフォルト設定にリセットすることができます。
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。[ロググループのリセット] ウィンドウで、[リセット] を選択します。
永続ロググループ
ロググループは、再起動するたびにデフォルト設定にリセットされます。リセットを防ぐには、永続ロググループを使用します。
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。[再起動後に選択を保持] ウィンドウで、[永続] を [オン] に設定します。
[ソース]タブの使用
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
タスクの選択は、仮想ステーション構成ワークスペースのタスクメニューで行われます。
締め付けのためのタスクとして使用される外部信号は、ソース タブで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは同様の物です。2 つのタイプのソースタスクがあります。
タブで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは同様の物です。2 つのタイプのソースタスクがあります。
ソース締め付けタスク
ソースバッチタスク
ソース締め付けは、単一の締め付けプログラムを選択するのに使用します。
ソースバッチは、一連の締め付けプログラムであるバッチシーケンスを選択するのに使用します。
本セクション内
ソース締め付けの概要
締め付けメニューには、ソースバッチとソース締め付け構成のリストが表示されます。別のリストを仮想ステーションにリンクするには、目的の[仮想ステーション]に移動して、[タスクプロパティ] で [選択] を選択します。ここで、ソースを作業として選択することができます。ソース締め付けでは、特定の締め付けプログラムを指定子番号にリンクします。識別子番号がコントローラに送信されると、リンクされたプログラムは別の信号が送信されるまで何度も実行されます。
パラメーター名 | 説明 |
|---|---|
名前 | ソース締め付けに発行された名前。 |
説明 | ソース締め付けの説明。 |
バッチシーケンス完了時にツールをロック | オン: バッチシーケンスが完了するとツールがロックされます。 オフ: バッチシーケンスが完了してもツールはロック解除のままです。 |
ソケットセレクタ | コントロール:コントロールに設定すると、外部ソースでは、識別子番号を要求することで締め付けプログラムを選択します。識別子番号は、ソケットセレクターの対応するソケットにリンクされ、ソケットを持ち上げると、締め付けプログラムが選択されます。 確認:確認モードでは、ソケットセレクターは、管理ソースとして使用することができません。このモードで、識別子番号は、締め付けプログラムと特定のソケット(リスト内の追加列で表示)の両方にリンクされます。識別子番号が(外部信号により)要求されると、対応するソケットは、ソケットセレクターでダイアログを表示され、オペレーターがソケットを持ち上げると(他のソケットは無効)、締め付けプログラムが有効になります。ソケットが指定されない場合(つまり、ソケットコラムで 0 に設定されている場合)、締め付けプログラムが直接起動され、ソケットの状態は無視されます。 |
NG で増加 | オン: NG 締め付けが行われていても、バッチが前進します。 オフ:締め付けに最大連続NG を設定します。締め付けが成功した場合にのみ、バッチが前進します。 |
最大連続 NG | 許可される連続NG 結果数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、シーケンスの実行は停止されます。 |
バッチコントロール | ソース締め付けの実行方法を選択します。 内部:ソース締め付けの繰り返し回数を構成します。 外部:オープンプロトコルまたはフィールドバスを使用して行われる、ソース締め付けの実行回数を構成します。構成を変更すると、ソース締め付けをクリアし、クリーンな既知の状態から開始されます(バッチ内のバッチカウントは 0 にリセットされます)。変更が有効になる前に、進行中の締め付けを終了させることができます。 |
コマンド | 説明 |
|---|---|
追加 | 使用可能で一番小さい識別子で新しい行を追加します。 |
削除 | 選択した締め付けプログラムをリストから削除します。対応するチェックボックスを選択して、締め付けプログラムを選択します。 |
ソース締め付けの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [締付け] を選択し、追加を選択します。
ソース締め付けに名前を付けます。
正しいソケットセレクタを選択します(必要な内容に応じて、制御または確認)。
許可される連続NG 結果最大数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、シーケンスの実行は停止されます。
ドロップダウンメニューから、使用するバッチコントロールを選択します。
内部バッチコントロール:ソース締め付けの繰り返し回数を構成します。
外部バッチコントロール:オープンプロトコルまたはフィールドバスを使用して行われる、ソース締め付けの実行回数を構成します。構成を変更すると、ソース締め付けをクリアし、クリーンな既知の状態から開始されます(バッチ内のバッチカウントは 0 にリセットされます)。変更が有効になる前に、進行中の締め付けを終了させることができます。
既定では、新しいソース締め付けを作成する際に、編集可能な識別子番号は一つしか利用できません。さらに追加するには 追加を選択します。
すべての項目に識別子番号を付けます
ソケットセレクタを使用する場合、識別子の番号はソケットセレクタ内の位置に対応します。たとえば、識別子番号1はソケットセレクタのソケット番号1に対応します。
プログラムを選択して、締め付けプログラムのリストから選択することで、各識別子番号にリンクする締め付けプログラムを選択します。
ソースバッチの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [バッチ] を選択し、追加を選択します。
ソースバッチに名前を付けます
新規識別子文字列のスキャンで前のスキャンを中止しなければならない場合は、新規識別子を中止をはいに設定します。
識別子の方法(テキストの文字列、または数値文字列の数)を選択します
文字列が任意の順序でスキャンできる場合には、自由な順序をオンに設定します。
識別子文字列は、最大 4 つの異なる文字列で構成することができます。自由な順序をいいえに設定すると、文字列がシステムに認識されるには、文字列が特定の順序でスキャンされる必要があります。
自由な順序をオンに設定して、文字列間で長さが重複するとエラーが発生する場合があります。この場合、締め付けプログラムにスキャンされる順序はアクティブになりません。このエラーを解決するには、自由な順序をオフに設定するか、文字列の長さを調整します。
文字列に名前を付け、文字列の長さを入力します。(文字列の連結の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
有効位置 - 文字列の関連位置。(有効位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
保存位置 - システムで記録される位置。(保存位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
どの文字列(文字列の内容列)がどのバッチシーケンス(アクティブ化列)にリンクされなければならないかを示します。追加を選択して、さらに文字列を追加します。
「文字列の内容」の入力には、ワイルドカードが使用できます。ワイルドカードは文字列の任意の位置で使用できます。あいまいな一致結果には、バッチシーケンスはアクティブになりません。
ワイルドカードは「.」(ピリオド)です。
新規識別子を中止では、バッチシーケンスが有効で進行中に、2 番目の信号が解釈される方法を制御します。
バッチシーケンス で ID 番号が使用されている場合、入力信号またはソケットセレクタを使用して、バッチシーケンスでバッチを選択できます。
コントローラーは、識別子番号または識別子文字列のいずれかに基づいて、入力信号でバッチシーケンスを選択するように構成できます。
有効位置
有効位置を用いて、事前に定義した文字列と一致するよう文字列を組み合わせた際にバーコードの文字列でどの文字を読み込むかを指定します。有効位置の数は、事前に定義した文字列の文字数と一致する必要があります。
バーコード文字列を読み込む有効位置の構成
バーコード文字列の位置は、1~1024 の間の数に関連します。文字列の最初の位置は 1 であり、最後は 1024 です。
説明 | 有効位置 | 有効な構成 | 事前に定義した文字列と一致するバーコードの文字列 |
|---|---|---|---|
重要な位置の順序 | 1,2,3,7,8 | Ok | ABCGH |
重要な位置の任意の順序 | 7,1,2,3,8 | Ok | GABCH |
番号の範囲 | 1–3,7-8 | Ok | ABCGH |
識別子文字列の組み合わせ
マッチングで使用する識別子文字列は、工場管理システムから最大 4 文字列、または 1 つの文字列に組み合わせる必要がある最大 4 スキャナ入力の組み合わせです。
追加および削除コマンドボタンは、組み合わせる文字列の数を管理します。次のパラメーターが使用できます。
パラメータ | 説明 |
|---|---|
チェックボックス | 削除される場合にエントリを選択します。 |
名前 | 文字列には名前が与えられなければなりません。 |
長さ | 文字列の長さはわかっていなければならず、入力する必要があります。これは、正しい文字列識別子を組み合わせることができる上で重要です。 |
有効位置 | 照合で使用される合成文字列の(ハイフンで区切られた)カンマ区切り位置または範囲。 |
保存位置 | 結果に保存される文字列のカンマで区切られた位置または範囲。 |
複数の識別子文字列を使用する場合、次の段階を実施します。
新しいエントリをテーブルに作成するには、追加コマンドボタンを押します。
文字列に名前を発行します。
文字列の長さを入力します。
追加する文字列全てに段階 1 ~ 3 を繰り返します。最大 4 つの文字列を組み合わせることができます。
各行のスタートエンドパラメーターは、マッチングプロセスの次の段階で使用する組み合わせ文字列識別子のここの文字列位置を定義します。
入力として識別子文字列を使用するタスク選択プロセスの最初の部分は、アクティブにする文字列内の位置を定義します。
識別子文字列のどの位置をマッチングで使用するかを定義するには、有意な位置を入力します。これらの位置は、カンマで区切られているか、範囲で指定されるかのいずれかである必要があります。
保存位置
保存位置は、ソースバッチで使用される各文字列のどの部分が保存され、ログでどのように表示されるかをユーザーが指示できるフィールドです。このフィールドで、保存する必要のある文字列の位置を示します。位置は、完全な文字列の部分のみで構成できます。フィールドが空のままの場合、全(連結)文字列が保存されます。以下の表は、保存された位置の組み合わせのいくつかの例を示します。
保存位置の値はカンマ区切り(スペースなし)であり、範囲はハイフンを使用して示されます。
識別子文字列 | 位置 |
|---|---|
文字列 1:1234567 | 1-7 |
文字列 2:abcdef | 8-13 |
文字列 3:GHIJKL | 14-19 |
文字列 4:890 | 20-22 |
保存位置 | 保存された結果 |
|---|---|
(空き) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 は 1-12,19-21 に自動的に変更1-12,19-21 | 1234567abcdeL89 |
バッチシーケンスとソースのコピーと貼り付け
次をコピーして貼り付けることができます:
バッチシーケンス
ソースバッチとソース締め付け
以下のルールが適用されます:
同じコントローラーで実行できます
同じソフトウェアバージョンを実行する同じタイプのコントローラー間で行うことができます。
バッチ、シーケンスまたはソースをコピーしたものには、付属する、または関連するプログラム、モード、リンクなど、すべてのものが常に含まれます。
例:ソースバッチをコピーしたもの > 貼り付けると、新しいバッチシーケンス、およびプログラムがリンクされた新いソースバッチが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
[バッチシーケンス] または [ソース] を選択します。作業スペース領域には利用可能なプログラムがすべて表示されます。
1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
ソースバッチまたはソースの締め付けのエクスポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをエクスポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。エクスポートするソースバッチまたは締め付けのチェックボックスをオンにします。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<SourceBatch>.json または <SourceTightening>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
ソースバッチまたはソースの締め付けのインポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをインポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースエリアには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
新しいソースバッチまたはソースの締め付けは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更することはできません。
[ツール]タブの使用
[ツール]タブに、コントローラーに接続されているツールのリストが表示されます。表示されるメニューは、固定ツールのコントローラとハンドヘルドツールのコントローラによって異なり、接続されているツールに関する詳細情報を提供します。
設定メニューでは、ツールのアラームが設定できます。これらのアラームのトリガーポイントはツールメニューにあります。
ツールメニューの表示
プラント構造ワークスペース
でコントローラを選択します。[ツール]
タブに移動します。コントローラに接続されているツールのリストが表示されます。
表のツールのいずれかをダブルクリックすると、詳細情報が表示され、サービス設定にアクセスできます。
ツールの接続方法やワイヤレスペアリング方法については、コントローラのマニュアルを参照してください。
列 | 説明 |
|---|---|
Tool type(ツールタイプ) | ツールのタイプを示します。 |
型式 | ツールの詳細なモデル番号。 |
シリアル番号 | ツールのシリアル番号。 |
MAC address (MACアドレス) | MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。 |
ソフトウェアバージョン | ツールのソフトウェアバージョン。 |
最大トルク | ツールで可能な最大トルク値。 |
TurboTight の最大トルク | TurboTight 戦略を使用する際のツールで可能な最大トルク値。 特定のツールのみに適用されます。 |
TensorPulse の最大トルク | TensorPulse 戦略を使用する際のツールで可能な最大トルク値。 特定のツールのみに適用されます。 |
最大速度 | ツールの最高回転速度。 |
次の校正 | ツールの次の校正日。 |
仮想ステーション | ツールが接続されている仮想ステーション名。 |
一般情報
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
型式 | ツールモデル名 |
シリアル番号 | ツールのシリアル番号。 |
MAC address (MACアドレス) | MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。 |
製品番号 | オーダー番号と同じ。 |
ソフトウェアバージョン | ツールソフトウェアバージョン数。 |
ツールが ST レンチの場合、次の情報が表示されます。
情報 | 説明 |
|---|---|
型式 | ツールモデル名 |
シリアル番号 | ツールのシリアル番号。 |
ST レンチシリアル番号 | ツールのシリアル番号。 |
ソフトウェアバージョン | ツールソフトウェアバージョン数。 |
無線モジュールソフトウェアバージョン | ソフトウェアバージョン数。 |
一般的なツール情報は、ツール自体によって、コントローラまたはToolsTalk 2に表示されます。
限界
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
変速比 | 出力ギヤの角速度に対する入力ギヤの角速度の比率 |
最大トルク | ツールが締め付けで使用できる最大トルク。 |
TensorPulse の最大トルク | TensorPulse 戦略を使用してツールが締め付けに使用できる最大トルク。 特定のツールのみに適用されます。 |
TurboTight の最大トルク | TurboTight 戦略を使用してツールが締め付けに使用できる最大トルク。 SR31ツールのみに適用されます。 |
最大速度 | ツールの最高回転速度。 |
ツール限度情報は、ツール自体によって、コントローラまたは ToolsTalk 2に示されます。
ツールが ST レンチの場合、次の情報が表示できます。
情報 | 説明 |
|---|---|
最大トルク | ツールが締め付けまたは緩めに使用できる最大トルク。 |
最小トルク | ツールが締め付けまたは緩めに使用できる最小トルク。 |
接続
コントローラへの接続と割り当てられている仮想ステーション。
校正/トルク調整係数
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用で、ツールの基準トランスデューサーへの対応性と誤差の調整方法の制御に使用されます。
校正値はツールメモリに保存され、これを使って、正しいトルク値がコントローラで表示されるようツールのトルクトランスデューサで示されるトルク値を調整します。コントローラは最終校正日を表示します。
ツールの校正は、コントローラで行われ、トルク基準トランスデューサーを使用します。このプロセスは、Power Focus 6000 マニュアルに記述されています。
校正値パラメータ入力ボックスに算出した値を入力し、設定をクリックして、ツールのメモリに新しい校正値を保存します。
パラメータ | 説明 |
|---|---|
最終校正 | 最終校正の日付。 |
校正値 | パラメータ入力ボックスに測定値と計算値を入力します。 |
次の校正 | 次回の校正期限。 |
セット | 入力した値を保存します。 |
ツールが TBP の場合、次の情報が表示されます。
パラメータ | 説明 |
|---|---|
最終校正 | 最終校正の日付。 |
トルク調整係数 | トルク調整係数をパーセンテージで入力します。 |
セット | 入力した値を保存します。 |
ツールが ST レンチの場合、次の情報が表示されます。
パラメータ | 説明 |
|---|---|
変換器校正日 | 最終校正の日付。 |
ジャイロ校正日 | 最終校正の日付。 |
校正アラーム日付 |
|
メンテナンス
このツールは、サービス間隔数を保存し、ツールのメンテナンスまたはサービスが次に行われる前に締め付けを何回実行することができるかをカウントします。
パラメータ | 説明 |
|---|---|
最後の点検 | 最後の点検が実施された日時。最後のサービス日付は、修理工場で設定されます。最後のサービス日は、リセットボタンが押された現在の日時に設定されます。 |
サービスでの総締め付け数 | サービスでの総締め付け数 は、最初にツールが使用されてから、ツールが行った締め付けの合計数です。この値は、サービス時に更新され、次のサービスまで同じままです。 |
残りの締め付け数 | サービス間隔に達するまでの残りの合計締め付け回数 |
サービス間隔 | 次のサービスの前に実施される締め付け数。10,000 の倍数で設定できます。 |
パルスのサービス間隔 | [パルスツールのみ]次のサービスまでに実施されるパルス数。10,000 の倍数で設定できます。 |
残りのパルス | [パルスツールのみ] サービス間隔に達するまでの残りの合計パルス数 |
サービスカウンタ/データのリセット | リセットコマンドは、カウンタをリセットし、最後のサービス日を現在の日付に設定します。TBP ツールでは、オイルの状態もリセットされます。 |
セット | コマンドは、サービス間隔パラメータ入力フィールドに入力した値を保存し、値を 10,000 の倍数に調整します。 |
ツールTAG情報
このツール情報は、ツールタイプが ST レンチである場合のみ使用可能です。
パラメータ | 説明 |
|---|---|
TAG ID | エンドフィッティングツール(ソケット)にプログラムされるプログラム可能な RFID TAG識別番号。 |
トルク補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、ST レンチユーザーガイド(印刷物番号 9836 4134 01 版 2.12)を参照してください。 パラメーターは、エンドフィッティングツールの RFID TAGに保存されます。 |
角度補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、ST レンチユーザーガイド(印刷物番号 9836 4134 01 版 2.12)を参照してください。 パラメーターは、エンドフィッティングツールの RFID TAGに保存されます。 |
公称トルク | ST レンチのスマートヘッドにはトルク変換器が含まれており、レンチの公称トルクを定義しています。ST レンチユーザーガイド(印刷物番号 9836 4134 01 版 2.12)を参照してください。 |
バッテリー
メニューはバッテリーツールに使用できます。バッテリー情報とバッテリーの状態を示します。
パラメータ | 説明 |
|---|---|
充電状態(0~4) | 充電量が増えるほど、数字が高くなります。 |
正常性状態(0~2) | 状態がよいほど、数字が高くなります。 |
正常性
環境モニターからのデータを示します。この機器は定期的にパラメータを測定して保存します。
パラメータ | 説明 | 値 |
|---|---|---|
Refresh(リフレッシュ) | コマンドボタン: ツール値を読み取ります。 | |
履歴 | コマンドボタン: 履歴ウィンドウが開いて、最新の温度値を表示します。 | |
ツールモーター温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ツールエレクトロニクス温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ツールパルス単位温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
本セクション内
ハンドヘルドツールの構成
ハンドヘルドツールには、標準機能と、オペレータとコントローラ間の信号を提供するアクセサリ機能の両方を含めることができます。使用可能なツール機能のタイプは、ツールモデルによって異なります。ツール構成では、信号は異なる機能に割り当てられています。
構成はツールに割り当てられ、ツールは仮想ステーションに割り当てられています。
これについては、[構成] タブで説明されています。
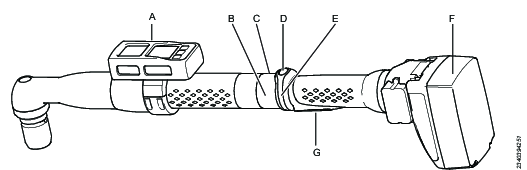
A | ツールアクセサリー |
B | LED リング |
C | 上部の青色 LED |
D | 機能ボタン |
E | 方向リング |
F | バッテリ |
G | ツールトリガ |
次のツール構成パラメータが使用できます。
青色 LED: 視覚出力信号。
ブザー: 異なる音声信号を供給できる音声出力信号。
方向スイッチ: 入力信号。
機能ボタン: 方向リングと組み合わせて、6 つの異なる入力信号が供給できます。
ツールアクセサリーバス: 異なるアクセサリーが入力と出力の両方の信号で構成できます。
ツール LED: ツール LED のリングを使用して異なる出力信号を供給できます。
このほかに、ツール構成はツールの開始方法と締め付けトレースの記録時を定義します。
ツール構成メニューの表示または編集:
プラント構造ワークスペース
でコントローラを選択します。 メニューバーにある構成タブ
を選択します。ワークスペースエリアに現在のアクセサリー構成が表示されます。
新しい構成を追加するか、タイプがツール構成の既存の構成をダブルクリックします。
必要な構成を追加します。パラメータについては、各セクションに説明されています。
ツール構成は次のメニューに分かれています:
メニュー | 説明 |
|---|---|
プロパティ | 構成の名前と説明と、ツールタイプフィルタ。 |
一般 | ツールの一般パラメータ。 |
ブザー | 異なる音信号の出力信号定義。 |
方向スイッチ | 方向スイッチは入力信号として使用されます。 |
機能ボタン | 機能ボタンは方向スイッチと一緒に、いくつかの入力信号を生成します。 |
ツール LED | 異なる LED 信号の出力信号定義。 |
アクセサリーバス | ツールアクセサリーの構成。 |
ツールの数が増えると、メニューの数も増えます。ワークスペースを見やすくするため、メニューを絞り込んで、選択されたツールタイプに関係するメニューのみを表示できます。フィルタはプロパティメニューで設定します。
ツール - QA 較正
外部ツール構成
オプション: | 機能 |
有効 | オン: 外部ツール構成オプションを有効化します。 オフ: 外部ツール構成オプションを無効化します。 |
仮想ステーション | 関連する仮想ステーションと接続します。 |
接続タイプ: | TCP ポートから接続 あるいは COM ポートから接続 |
TCP ポート | 接続タイプTCPポートが選択されていると、目に見えます。 前もって設置されているTCPポートを示します。 |
COM ポート | 接続タイプCOM ポートが選択されていると、目に見えます。 利用可能なCOM ポートでドロップダウンリストを示します。 |
[仮想ステーション] タブの操作
仮想ステーションタブ は、コントローラがプラント構造 で選択されるとコントローラメニューバーに配置されます。
仮想ステーションは、コントローラーのソフトウェアを抽象化したものです。1 つのコントローラで複数の仮想ステーションの作成が可能です。各仮想ステーションはコントローラとして動作します。仮想ステーションには必要に応じてさまざまな構成を割り当てることができます。
仮想ステーションメニューから、タスクの選択、アクセサリー構成の割り当て、ツールの割り当て、診断を使用する送受信信号の監視と操作、通信プロトコルパラメータの設定ができます。仮想ステーションのアイコンは、FlexController とPower Focus 6000の両方で使用できます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
本セクション内
仮想ステーションの概要
仮想ステーションのワークスペースを開いて、仮想ステーションのリストを表示するには:
プラント構造ワークスペース
でコントローラーを選択します。メニューバーで仮想ステーション
タブを選択します。ワークスペースエリアに、コントローラーの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
列 | 説明 |
|---|---|
チェックボックス | 仮想ステーションを選択します。 |
名称 | 仮想ステーションの名前を示します。 |
説明 | 仮想ステーションの説明。 |
変更者 | 変更を行ったユーザー |
コントローラー更新 | コントローラーが最後に更新された時刻 |
コントローラー更新者 | コントローラーを更新したユーザー |
コマンド | 説明 |
|---|---|
追加 | 新しい仮想ステーションを作成します。 すべての機能を利用するには、新しく作成した仮想ステーションをコントローラーにプッシュする必要があります。 |
削除 | 選択した仮想ステーションをリストから削除します。 |
仮想ステーションの構成メニューにアクセスするには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
次のメニューが表示されます:
メニュー | 説明 |
|---|---|
プロパティ | 構成に名前と説明を指定します。オプション。 |
プロトコル | 外部通信プロトコルの有効化と構成。 |
ツール | 仮想ステーションにツールを割り当てます。 |
ツール構成 | 仮想ステーションにツール構成を割り当てます。 |
フィールドバスマッピング | コントローラーに構成され、割り当てられている場合に、フィールドバスマッピングを表示します。このフィールドは情報を示すだけです。実際のフィールドバスのマッピングと設定は、フィールドバスと SoftPLC |
タスク | 仮想ステーションにタスクを割り当てたり、ソース信号が実行するタスクを選択する方法を構成します。 |
アクセサリ | アクセサリー構成とアドレスをアクセサリーに割り当て、その組み合わせを仮想ステーションに割り当てます。 |
一般 | 一般仮想ステーションを割り当てるときに使用します。 |
手動モード | 手動モード機能の構成に使用します。 |
ライセンス | 仮想ステーションへのライセンスと機能の割り当て・削除に使用されます。 |
FlexControllerでは、プロパティ、フィールドバスマッピング、タスクメニューのみが使用できます。
関連情報
仮想ステーションへのライセンスタイプと機能の割り当て
仮想ステーションエリアでは、ライセンスを特定の仮想ステーションに割り当てることができます。プラント構造
でコントローラーを選択して、次に 仮想ステーション タブを選択します。さまざまな仮想ステーションを含むリストが表示されます。
仮想ステーションタイプの割り当て
構成する行をダブルクリックします。
ライセンス構成で、仮想ステーションタイプ を選択します。
次のいずれかのオプションを選択します:
変更を選択して現在のタイプを変更すると、使用可能なタイプを含むダイアログウィンドウが開きます。
現在のタイプを削除するには、削除を選択します。
選択で、新しいタイプを追加します。タイプを選択し、[OK] を選択します。
仮想ステーション機能割り当て
構成する行をダブルクリックします。
ライセンス構成で、仮想ステーション機能 を選択します。
次のいずれかのオプションを選択します:
追加を選択して新しい機能を追加すると、使用可能な機能を含むダイアログウィンドウが開きます。機能を選択して[OK]をクリックします。
現在のタイプを削除するには、削除を選択します。
バーチャルステーションへのツールの割り当て
ツールメニューを使用して、仮想ステーションにツールを割り当て、割り当てられたツールの情報を示します。
機能 | 説明 |
|---|---|
型式 | 仮想ステーションへ現在割り当てられているツール。 |
最大トルク | ツールがコントローラに接続され、仮想ステーションに割り当てられている場合にのみ表示される情報。 |
ソフトウェアバージョン | ツールがコントローラに接続され、仮想ステーションに割り当てられている場合にのみ表示される情報。 |
シリアル番号 | ツールがコントローラに接続され、仮想ステーションに割り当てられている場合にのみ表示される情報。 |
MAC address (MACアドレス) | MAC アドレスのあるツールがコントローラに接続され、仮想ステーションに割り当てられている場合にのみ表示される情報。 |
製品番号 | 製品番号が指定されているツールがコントローラに接続され、仮想ステーションに割り当てられている場合にのみ表示される情報。 |
割り当て解除 | コマンドボタン。 仮想ステーションからツールの割り当てを解除します。 |
選択 | コマンドボタン。 ツールを変更するか、仮想ステーションに新しいツールを割り当てます。ツール選択タスクのためのポップアップウィンドウが開きます。 |
ケーブルツールは、電気ケーブルでコントローラに接続されます。コントローラはツールに接続するケーブルを 1 本使用できます。
バッテリツールは、次の 3 つの方法で接続できます:
Bluetooth - 直接通信を使用する
WLAN(アドホックモード) - 直接通信を使用する
インフラストラクチャ モード - アクセス ポイントを介したプラント自身のネットワーク内における間接通信を使用する
通信設定を構成する際は、特定のツールのマニュアルを参照してください。
機能 | 説明 |
|---|---|
無線ツールシリアル番号 | まだコントローラに接続されていない仮想ステーションにワイヤレスツールを割り当てることができます。ワイヤレスツールは、そのシリアル番号で識別され、これはデータ入力フィールドに入力できます。 ワイヤレスツールをコントローラに接続するワイヤレスペアリングのプロセスについては、コントローラのマニュアルを参照してください。 |
STB、SRB、TBP、ST レンチ | 新しいワイヤレスツールにツールタイプを選択します。 |
選択 | コマンドボタン。 すべての選択を実行します。 |
閉じる | 何も変更せずにポップアップウィンドウを閉じます |
ツールのリスト | リストには、現在コントローラに接続されているすべてのワイヤレスツールが含まれます。仮想ステーション列は、ツールが、仮想ステーションにすでに割り当てられているかどうかを示します。 ケーブルツールがコントローラに接続されている場合も、リストに含まれます。 |
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
ツールの割り当て
ツールメニューで選択を選択します。
ツール表のリストからツールを 1 つ選択するか、コントローラに接続するワイヤレスツールのシリアル番号を入力します。
シリアル番号を入力する場合、ワイヤレスツールが STB、SRB、TBP、ST レンチツールのいずれであるかを選択します。
ツールの製品番号を入力します。このフィールドはオプションです。
選択 を選択します。
プッシュ機能でコントローラを更新します。
ツールとツール構成の両方を仮想ステーションに割り当てることが重要です。ツール構成は、構成セクション で作成されます。
仮想ステーションへのタスク割り当て
仮想ステーションワークスペースの[タスク]メニューは、 タスクを選択して割り当てるために使用されます。
メニューは Power Focus 6000 とFlexControllerの両方で使用できますが、機能が異なります。
機能 | 説明 |
|---|---|
名前 | 仮想ステーションへ現在割り当てられているタスク。 タスクが選択されていない場合、フィールドは空白です。トリガを押すと、イベント番号 4025 締め付けプログラムが選択されていませんが表示されます。 エラーインジケーターが名前の横に表示されます |
割り当て解除 | コマンドボタン。 仮想ステーションからタスクを選択解除します。 |
選択 | コマンドボタン。 タスクを手動で変更するか、外部ソースを構成してタスクを選択します。タスクの選択を構成するタスクの選択ポップアップウィンドウが開きます。 |
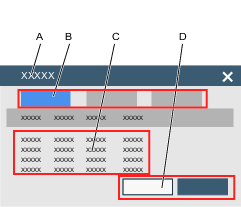
A | タスクの選択ポップアップウィンドウ。 | B | 選択タブ。
|
C | 使用できるタスクのリスト:
| D | コマンドボタンの選択。 コマンドボタンの閉じる。 |
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
タスクの割り当て
タスクメニューで選択を選択します。
タスクの選択ポップアップウィンドウが表示されます。
タブを選択して、リストから項目を 1 つ選択します。
締め付けプログラム: コントローラで使用できる締め付けプログラムのリストから選択します。
バッチ: コントローラで使用できるバッチシーケンスのリストから選択します。
ソース: コントローラで使用できるソースタスクのリストから選択します。
FlexController を使用する固定ツールにはソースのみが使用でき、複数スピンドル締め付けの一行のみが選択できます。
選択 を選択します。タスクの選択ポップアップウィンドウが閉じます。
閉じるボタンをクリックすると、何も変更せずにポップアップウィンドウを閉じます。
プッシュ機能でコントローラを更新します。
タスクメニューの名前フィールドが更新されます。
ソース番号と ID 番号を使用するタスク選択と、タスク選択のための識別子文字列の詳細については、ソース構成のマニュアルを参照してください。
関連情報
仮想ステーションへのアクセサリの割り当て
このメニューは、携帯型ツールをサポートするコントローラ専用です。
コントローラは CAN バスから複数のアクセサリーに接続できます。各アクセサリーには、1 ~ 15 の範囲のバスに固有のアドレスが必要です。仮想ステーションに複数のアクセサリーを割り当てることができます。
アクセサリーに仮想ステーションを割り当てるには、アクセサリーにはアクセサリー構成が割り当てられている必要があります。
バーチャルステーションに現在割り当てられているアクセサリーを表示するには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
機能 | 説明 |
|---|---|
チェックボックス | 仮想ステーションから割り当て解除ができるアクセサリー構成を選択します。 |
名前 | アクセサリーに割り当てられている構成の名前。 |
タイプ | アクセサリーのタイプ。 |
CAN ノード | アクセサリーの CAN アドレス。 |
シリアル番号 | アクセサリーのシリアル番号。 |
ステータス | 次のいずれか。
|
CAN ノード列には、新しいアクセサリーの接続時に使用できない使用済みのアドレスが示されます。ソケットセレクタの割り当てには、複数のアドレスを含めることができます。
ソケットセレクタには、CAN ノードの順番が重要です。最初のソケットセレクタの最下位の位置が、最初に割り当てられます。
機能 | 説明 |
|---|---|
割り当て解除 | 選択されたアクセサリーが仮想ステーションから割り当て解除されます。アクセサリーはコントローラに接続されたままになります。 |
選択 | 新規アクセサリーを追加します。アクセサリーのポップアップウィンドウが開きます。 |
診断 | I/O 信号挙動を監視し、コントローラの内部論理とアクセサリー間で指定する状態に信号を強制することが可能です。 |
関連情報
仮想ステーションへのアクセサリーの追加
選択したアクセサリーには固有で有効な CAN バスアドレスが必要です。アクセサリー構成はアクセサリーに割り当てられ、アクセサリーは仮想ステーションに割り当てられます。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションにアクセサリーを割り当てるには:
アクセサリーメニューの選択ボタンを選択し、アクセサリーポップアップウィンドウを開きます。
タブの 1 つでアクセサリーのタイプを選択します。
- をクリックして構成のリストから構成を 1 つ選択します。
- をクリックして使用可能な CAN ノードのリストからアドレスを 1 つ選択します。
各コントローラにいくつかのソケットセレクタを接続することができます。各ソケットセレクタには固有の CAN アドレスがあります。すべてのソケットセレクタに同じ構成を割り当てることができます。CAN ノードの順番は、正しい順番でソケットを定義するために重要です。最下位のソケットセレクタを最初に選択し、昇順に選択していきます。
選択ボタンを選択して、アクセサリーオプションを一つ追加します。
仮想ステーションに割り当てる各アクセサリーに手順を繰り返す。
キャンセルボタンを選択し、ポップアップウィンドウを閉じます。
アクセサリーメニューが更新され、新しく割り当てられた構成が表示されます。
アクセサリーアドレスは、アクセサリーの回転スイッチで設定されます。アクセサリーの詳細製品情報文書を参照してください。アクセサリーアドレスの範囲は、1~15 の範囲です。
関連情報
仮想ステーションからアクセサリの割り当てを解除する
アクセサリ構成の割り当てを解除し、仮想ステーションへの接続を解除するには、次のステップに従います。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
アクセサリメニューで、割り当てを解除するアクセサリ構成のチェックボックスをオンにします。
アクセサリーメニューで割り当て解除コマンドボタンを選択します。
変更を反映してコントローラを更新するには、変更のプッシュ配信 コマンドボタン
を選択します。
アクセサリメニューの一覧が更新されます。
関連情報
I/O の構成
I/O 診断は、外部ハードウェアのトラブルシューティングと構成のテストに使用されます。オペレーターは、正しく作動しないステーションをトラブルシューティングできます。ステーションの挙動はソフトウェア、ハードウェア、構成だけでなく、その入出力すべての組み合わされた状態でで定義されます。そのため、入出力の状態の概要を取得すると役に立つことがあります。これは、例えば次のような問題の解明に使用できます。
アクセサリーのハードウェア障害 (ランプ/ケーブル/ボタンなど)
周辺システムから入力を正しく受信していないことの疑い
出力が周辺システムに正しく送信されていないことの疑い
I/O 診断機能にアクセスするには:
プラント構造ワークスペース
でコントローラを選択します。 コントローラワークスペースのメニューバーで仮想ステーション
を選択します。ワークスペースエリアに、コントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
仮想ステーション名をダブルクリックして既存の仮想ステーション構成を開くか、追加をクリックして新規作成します。
ワークスペースに、特定の仮想ステーションに割り当てられているアクセサリーを含む、メニューが表示されます。
診断するデバイスのチェックボックス
を選択します。デバイスは接続済み状態でなければなりません。診断を選択します。
I/O 診断機能は、選択したデバイスに送受信される、送受信信号を監視できます。強制モードから情報を操作することもできます。
I/O 診断は次から使用できます。
コントローラ GUI
Web GUI
ToolsTalk
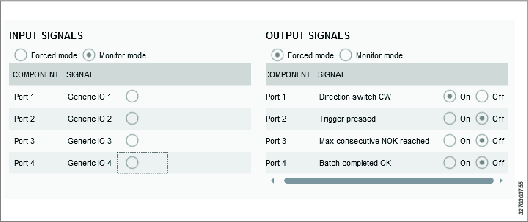
診断モード | 監視モードまたは強制モードを有効にします。 監視モード: 監視モードでは、デバイスで送受信される送受信信号で構成されたすべてのフィールドの状態を見ることができます。信号に変更があれば、ビューが更新されます。 強制モード: 強制モードでは、信号は現在の状態に固定され、クライアントから操作することができます。これで、オペレーターは信号を個別に有効または無効にできるようになります。強制モードでの信号値への変更は、コントローラに即座に反映されます。強制モードを終了すると、すべての強制された信号が実際の値に設定されます。つまりこれは、強制されなかった場合の値です。 |
コンポーネント | コンポーネント列には、送受信信号を接続するデバイスのパーツをリスト表示します。 |
信号 | 選択したデバイスに構成されている信号のリスト。信号が構成されていない場合、フィールドには「なし」の文字が表示されます。 |
一度に 1 つの診断セッションのみが有効にでき、一度に 1 つのデバイスのみを診断状態にできます。診断がすでに使用されている場合は、情報メッセージが画面で表示されます。
一般仮想ステーション構成の割り当て
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションに一般構成を割り当てるには:
仮想ステーション構成ワークステーションで、一般エリアに移動します。
変更を選択します。ポップアップウィンドウに表示される一般構成は構成
に追加されているものです。一般構成を 1 つ選択して変更ボタンを選択します。
選択した一般構成で一般メニューが更新されます。
割り当てられていない一般仮想ステーション構成のみが削除できます。
仮想ステーションでのツール構成
このメニューはPower Focus 6000 の携帯型ツールのみに表示されます。
ツールは、ツールアクセサリーの複数の構成を持つ場合があります。ツールアクセサリーには、LED、プッシュボタン、ブザー、方向リングなどがあります。デジタル I/O 信号は、オペレーターとの操作を行うように構成できます。ツールアクセサリーの構成は構成メニュー で行います。
機能 | 説明 |
|---|---|
名前 | ツール構成の名前。 |
ツールタイプ | ツールタイプフィルタは、選択したツールの構成を表示するのに使用できます。フィルタは、ツールアクセサリーが構成 |
説明 | オプションのツール構成の説明フィールド。 |
変更 | 選択したツール構成を、選択した仮想ステーションに割り当てられているツールに割り当てます。 |
閉じる | 変更を保存しないでポップアップウィンドウを閉じます。 |
| 構成のリストはアルファベット順に並べ替えることができます。並べ替えの方向を変更するには、矢印をクリックします。 |
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
:
ツール構成の選択
ツール構成メニューで変更を選択します。
ツール構成を選択しますポップアップウィンドウが、使用可能なツール構成で表示されます。
ツール構成の行を選択し、ポップアップウィンドウで変更を選択します。
ツール構成を選択しますポップアップウィンドウが閉じます。
ツール構成メニューに選択した構成名が表示されます。
ツールフィルタがツールアクセサリー構成で使用され、ツールが仮想ステーションに接続され、割り当てられている場合は、ツールタイプ列には関連構成のみが表示され、リストは選択可能な構成のみになります。
ツールが仮想ステーションに割り当てられていない場合、またはツールフィルタが使用されていない場合は、すべてのツール構成がリストに表示されます。
関連情報
仮想ステーション - プロパティ
仮想ステーションには名前が必要です。これはプロパティメニューで指定します。既定の名は仮想ステーション < index nr >です。オプションの説明フィールドも使用できます。
名前フィールドを空白にすると、赤のエラーインジケーターが表示されます 。
仮想ステーションでのフィールドバスマッピング
コントローラーには、フィールドバス通信モジュールをインストールできます。この通信モジュールは、すべての仮想ステーションに機能します。フィールドバスマッピングメニューは、コントローラーにマッピングされているフィールドバス構成を示します。フィールドバスが構成され、この構成は フィールドバスと SoftPLC で割り当てられ、マッピングされます。
本セクション内
フィールドバス診断
フィールドバスマッピング診断機能にアクセスするには:
プラント構造ワークスペース
でコントローラを選択します。 仮想ステーション
に移動します。ワークスペースエリアに、コントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
仮想ステーション名をダブルクリックして既存の構成を開くか、追加を選択して新しい仮想ステーション構成を作成します。
ワークステーションには、マッピングされているフィールドバスなどのメニューが表示されます。
診断ボタンをクリックして、フィールドバス診断機能を入力します。
フィールドバス診断機能は、フィールドバスで送受信される、送受信信号を監視できます。強制モードから情報を操作し、フレームの作成と送信をすることもできます。フィールドバス診断は次から使用できます。
コントローラ GUI
Web GUI
ToolsTalk
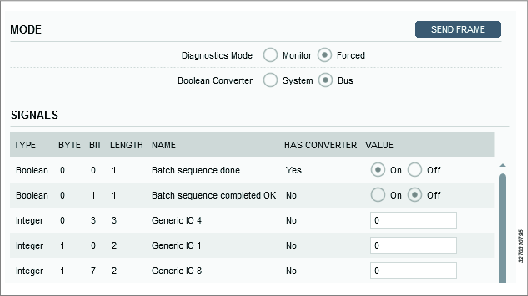
診断モード | 監視モードまたは強制モードを有効にします。 監視モード: 監視モードでは、フィールドバスで送受信される送受信フレームで構成されたすべてのフィールドの状態を見ることができます。受信フレームのビットに変更があれば、ビューが更新されます。 強制モード: 強制モードになると、データが現在の状態に固定され、フレームがロックされます。強制モードでは、信号を手動で有効化および無効化することも、値を入力して 1 つ以上の信号に強制することもできます。これは受信フレームまたは送信フレーム、またはその両方で可能です。 |
ブール値コンバーター | システムビューとバスビューの間のスイッチ。コンバーターは、フィールドバスで送受信される信号を反転できます。 |
タイプ | 信号のタイプ。 |
バイト | フレームの位置。 |
ビット | フレームの位置。 |
長さ | フレームの信号の長さ。 |
名前 | 信号の名前。 |
コンバーターあり | コンバーターが構成されている場合、コンバーターありははいになります。 はいの場合、信号を反転するためにコンバーターを使用できます。いいえの場合、コンバーターは適用されません。 |
値 | 値列は、信号とその値のリストを表示します。送受信フレームの各信号の値は、タイプに応じてブール値、整数、文字列のいずれかの形式で表示されます。値は強制モードで編集できます。単一の信号、同じフレームの複数の信号、またはすべての信号を変更することができます。 値を変更すると、フレームの送信ボタンをクリックして新しいフレームをコントローラにプッシュし、新しい値を適用します。 診断モードを終了すると、すべての値は、送受信信号の最後に保存されたフレームの値に戻ります。 |
同時に有効にできるのは 1 つの診断セッションのみです。診断がすでに使用されている場合は、情報メッセージが画面で表示されます。
仮想ステーション - プロトコル
プロトコルメニューには、単一または複数の通信プロトコルとパラメータ設定が実装できます。使用できるプロトコルは、IAM ライセンスによって異なります。
一部の通信プロトコルは、プロトコルメニューで構成します。
本セクション内
オープンプロトコル
オープンプロトコルの構成
プラント構造ワークスペース
でコントローラーを選択してください。仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラーの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加を選択して新しい仮想ステーション構成を作成します。
プロトコル メニューの構成を選択します。
仮想ステーションのオープンプロトコル構成スイッチは、工場制御機器の一部である、仮想ステーションと整数との間のオープンプロトコル通信を有効または無効にできるようにします。
オープンプロトコルは、設定に使用されるか、あるいは強化結果をもたらすコントローラーの同じイーサネット接続ファクトリを使用します。
各バーチャルステーションは、ポート番号で独自に特定されます。オープンプロトコルを使用する各バーチャルステーションで、ポート番号をポートフィールドに入力する必要があります。
オープンプロトコルがタスクの選択に使用される場合、切断設定によって、仮想ステーションとクライアントとの間の通信が切断される場合の操作が制御されます。
なし: システムがオープンプロトコル クライアントへの接続を失った場合、対策は何も講じられず、選択したタスクは通常の動作を続行できます。
タスクの割り当て解除: システムがオープンプロトコルへの接続を失った場合、選択したタスクの選択は解除され、ツールはロックされません。
オープンプロトコルエラーが発生すると、現在の締め付けが終わり、タスクが終了します。現在のタスクが仮想ステーションから選択解除されます。
通信エラーが発生すると、現在の締め付けが終わり、タスクが終了します。現在のタスクが中止され、仮想ステーションから選択解除されます。
高でロックツール有効: システムがオープンプロトコルへの接続を失った場合、ツールはロックされます。
オープンプロトコル接続が復元されても、ツールはロックされたままになります。通常の動作を再開するには、ツールをMID 0043(ツール有効)またはIO信号マスターロック解除を使用してロック解除する必要があります。
[ロック] ツールオプションが選択されている場合、タスクの選択は解除されません。
ツールを常時ロック: システムがオープンプロトコルへの接続を失った場合、使用されているタスクがオープンプロトコルを通じて選択されているかどうかに関係なく、ツールはロックされます。
オープンプロトコル接続が復元されると、通常の動作を再開するには、締め付けプログラムとシーケンスタスクを選択する必要があります。
オープンプロトコル接続が復元されても、ツールはロックされたままになります。通常の動作を再開するには、ツールをMID 0043(ツール有効)またはIO信号マスターロック解除を使用してロック解除する必要があります。
レガシカウンタ設定では、シーケンスのすべての締め付けをカウントし、その数値を二次システムに出力します。この設定を有効にするには、レガシーカウンタを使用をオンに設定します。
SoftPLC インデックスは、共有メモリ内でオープンプロトコルのコマンドが書き込まれる場所をマッピングするために使用されます。既定値は 1 ですが、1 ~ 6 の値を入力できます。
SoftPLC インデックス の既定値は常に 1 で、使用中かどうかを確認するチェックは行われないため、仮想ステーションの追加時に同じインデックスが複数回構成されるようにシステムを構成している可能性があります。この場合、Soft PLC は、着信 MID がどの仮想ステーションから発信されているかを判断できません。
仮想ステーション - 診断
診断は I/O とフィールドバスの両方の構成で使用できます。
I/O 診断の詳細については、『ユーザガイド』の「関連情報」を参照してください。
フィールドバス診断の詳細については、『ユーザーガイド』の「関連情報」を参照してください。
デジタル信号診断
展開時、トラブルシューティング時に、コントローラー診断ツールは非常に有用です。仮想ステーションメニューのデバイス構成やフィールドバスマッピングの情報タグの下にある分析で利用可能です。
コントローラーは、通常モードまたは診断モードで動作できます。通常モードでは、デジタル入力信号と出力信号が正常に動作し、内部コントローラーロジック間、および外部アクセサリーまたはコネクタにルーティングされます。
診断モードは、モニターモードと強制モードに分けられます。モニターモードでは、信号が正常に働きますが、信号動作のライブ監視を行います。強制モードでは、コントローラーの内部ロジックと外部アクセサリー間の接続が開かれ、入力信号と出力信号を所望の状態に導くことができます。
一度に 1 つのデバイスまたは 1 つのフィールドバスのデジタル信号を診断することが可能です。
通常の操作
通常の操作モードでは、外部入力信号は内部コントローラロジックに送られ、コントローラ出力信号は、診断モジュールの介入なしに、外部ターゲットに送られます。
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
デジタル信号の監視
診断モードでは、コントローラの内部論理回路に出入移動する全ての信号が監視されます。信号タップは診断モジュールで接続され、信号の状態は、Web GUI またはコントローラ GUI で表示されます。
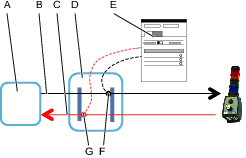
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
E | ユーザインターフェイス |
F | 出力信号タップ |
G | 入力信号タップ |
デジタル信号の強制
診断モードでは、コントローラの内部論理回路に出入移動する全ての信号が所望する状態に強制されます。信号のラインは、診断モジュールで表示されます。ユーザーインターフェイスからの入力信号と出力信号の両方を定常状態に強制できます。ユーザーインターフェースは、Web GUI またはコントローラ GUI のいずれかです。
シグナルが強制される間、コントローラは正常に作動します。診断モードと強制モードを出ると、すべての信号は、コントローラの現在の動作状態に設定されます。この設定は、望ましくない動作を生み出すデジタル出力の状態変化に繋がる場合があります。
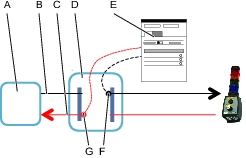
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
E | ユーザインターフェイス |
F | 強制出力信号挿入ポイント |
G | 強制入力信号挿入ポイント |
仮想ステーション - 手動モード
仮想ステーションの手動モードは、ツールがロックモードになっている状態でタスクを実行するために使用します。特定の理由でツールがロックされている場合(例えば、ツールが TLS のフットプリント外にある場合)でも、緊急作業を行うといった特定の作業をツールで行う必要があるかもしれません。仮想ステーションを手動モードに構成することで、ユーザーは、手動モードを入力する際にどの信号が送られるか(入力信号)、手動モードの場合にどの作業が実施できるか(二次作業)、手動モードを終了する際にどの信号が送られるか(終了信号)を決定できます。
所望のシナリオは異なるユーザー間で変わるため(すなわち、開始と終了時にどの信号が送信されるか、どの作業を実施するか)、手動モードは、各仮想ステーションで完全に構成可能です。
本セクション内
手動モードの構成
構成は、入力信号、終了信号および二次タスク (一次タスクは、タスクの下にある仮想ステーションに割り当てられる「自動」タスクの意味) の 3 つの要素から成ります。二次タスクが選択されていない場合、一次タスクが実行されます。
仮想ステーションメニューに移動し、仮想ステーションを選択して構成し、次に手動モードの下にある構成を選択します。
手動モードの構成画面で、二次タスクを設定します。これにより、手動モードでどの作業を実施しなければならないかを決定します。
同じ作業(締め付け、バッチシーケンス、ソース)は、一次作業のような二次作業に対して設定できます。
追加ボタンを選択して入力信号が送信されるように設定します。
追加ボタンを選択して終了信号が送信されるように設定します。
入力および終了に送信される信号には 99 個の制限があります。
入力信号と終了信号のパラメーターは同じです。
手動モードのトリガー
手動モードは、スイッチまたは外部システムによって有効にできます。例えば (以下に示す)、操作パネル上のキースイッチは、手動モードを有効にするよう構成できます。
構成メニューに移動し、オペレーターパネルを選択します。
構成ウィンドウで、[A,B,C,D,E,F,G,I] の位置に移動して構成し、リストから 1 方向スイッチを選択します。
ターン信号リストをクリックします。リストから手動モードを選択します。
ウィンドウを閉じます。
手動モードが開始または終了したことをユーザーに通知する必要がある場合は、イベント 4070 および 4071 をそれぞれ構成する必要があります。これは設定 - イベントで行います。
FlexSystem および同期締め付けの構成
同期締め付けによる作業
Power Focus 6000 および PF8 コントローラーを使用すると、複数のコントローラーを一緒に接続し、同期した締め付けを実行することができます。構成内の最初のコントローラーは Sync Reference と呼ばれ、すべての締め付けとデータの報告を処理します。最大 5 つの追加コントローラーをケーブルで Sync Reference に接続できます。これを同期メンバーと呼びます。唯一の機能はツールを制御することです。
Sync Reference
Sync Reference は、システム内の頭脳です。以下を制御します:
締め付け設定
データレポート
システム全体の構成
Tools Talk および ToolsNet への接続
アクセサリとフィールドバスは、Sync Reference に直接接続されます。
Sync Member
Sync Member は、特別な機能を持たないドライブとして機能します。IT 部が動作していないため、外部アクセサリやプロトコルを Sync Member に接続することはできません。各 Sync Member にはチャネル番号が割り当てられています (2-64)。チャネル番号は次の目的で使用されます:
ToolsTalk 2 のハードウェアレイアウト構成内で接続されているツールとドライブを識別する。
結果レポートを作成する。
エラーイベントで障害のある部分を特定する。
締め付け
マルチステップ締め付けプログラム実行のみが可能です。各ツール間の締め付けを同期するには、同期点を使用します。これらのツールは、ステップ締め付けプログラムで次のステップに進む前に、この点でお互いを待ちます。締め付けプログラムには、最大で 25 ステップ (同期点を含まない) を含めることが出来ます。修復パスまたは終了パスは許可されません。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
[ハードウェア構成]タブの使用

ハードウェアレイアウト構成のオフラインプログラミングは、コントローラテンプレートライブラリで行います。
構成領域
設定領域では、レイアウトを最初から作成するか、コントローラから抽出した既存のレイアウトを更新することができます。
抽出 | コントローラに接続されているハードウェアに従ってハードウェアレイアウト構成を更新します。 |
ズームイン | レイアウトを拡大表示します。(Ctrl + マウスホイールを前に押す) |
ズームアウト | レイアウトを縮小表示します。(Ctrl +マウスホイールを手前に押す) |
画面に合わせる | レイアウトを既定のサイズに戻します。 |
削除 | 選択項目を削除します。 |
ハードウェアレイアウトの作成
システムの新規インストールには、以前のハードウェアレイアウト構成は含まれていません。ToolsTalk 2 をコントローラーに接続するたびに、ハードウェアレイアウト構成は空になります。新しい構成を作成するか、現在のコントローラーハードウェアセットアップを抽出する必要があります。
ハードウェアレイアウトの作成
FlexSystem の場合は、ツールボックスのキャリア (3スロットまたは6スロット) から始めてください。チャネル番号の順序については、最初に 6 スロットキャリアを使用することをお勧めします。2台を超える FlexCarrier を搭載したシステムでは、6 スロットの FlexCarrier を使用してハードウェア構成を開始してください。
同期締め付けシステムの場合は、ツールボックスの Sync Reference コントローラーから開始します。
FlexCarrier または Sync Reference コントローラをここにドロップエリアにドラッグしてドロップします。インジケーターが表示されます。記号をポイントしてツールチップを表示させることもできます。
他の商品をツールボックスから目的の場所にドラッグします。製品で行き先の場所をポイントすると、行き先の場所の色が変わります。
赤: 無効なドロップ
青: 有効なドロップ
すべての製品を使用して、1つの製品またはキャリアを移動、コピー、および削除できます。
移動するには、製品をクリックしてドラッグします。
コピーするには、Ctrl キーを押しながら製品をドラッグします。
削除するには、製品を選択するか、Ctrl キーを押しながら複数の製品を選択し、削除 キーを押します。FlexControllerを含むFlexCarrierは、それが唯一の残りのキャリアである場合にのみ削除できます。Sync Memberとツールが接続されているSync Reference コントローラは、これが最後に残ったたった一つの製品である場合、または他のすべての製品が同時に削除される場合にのみ削除できます。
作成後、変更をコントローラにプッシュします。ハードウェア展開のステータスは、検証後に変更されます。
ハードウェアレイアウト構成の抽出
[ハードウェアレイアウト構成] が空の場合は、抽出ボタンを使用して現在のコントローラ設定を抽出できます。
抽出を選択すると、ハードウェア構成の抽出 ダイアログボックスが開きます。
OKを選択して現在の構成を抽出します。
抽出後、ステータスと正常性を受け取るためにコントローラに変更をプッシュ配信します。ハードウェア展開のステータスは、検証後に変更されます。
ハードウェアレイアウト構成をテンプレートとして作成する場合、抽出機能は使用できません。
ステータス
コントローラが接続され、オンラインであり、ハードウェアレイアウト構成がコントローラと同期している場合、ToolsTalk 2 はハードウェア展開ステータスの変更に関する通知を受信し始めます。通知があると、ToolsTalk 2はコントローラにハードウェア測定データを要求します。
詳細な展開ステータスと測定データを表示するには:
構成エリアで製品を選択します。Ctrlキーを押しながら選択すると、複数の製品を選択できます。
ステータスバーからウィンドウを展開します。
ヒント:
パネルの高さは、上の境界線をドラッグすることで増やすことができます。
最新の測定データを取得するには、 更新 をクリックします。
ヘルスステータスの詳細は展開することができます。NG 結果を含むデータのみを表示するには、NG のみ表示を選択します。
ツール構成
ツールごとに、使用可能なすべてのツール構成を含むリストからツール構成を選択することができます。既定では、ツール構成のマッピングは行われません。ツール構成にマップされていないツールを実行することは可能です。の場合、コントローラは複数トランスデューサー機能を有効にせずに、内部で作成された既定のツール設定を使用します。
禁止モード
チャネル (ドライブまたはツール) に問題がある場合は、ハードウェアの使用を続けられるように禁止モードを設定できます。
否: チャンネルは正常に動作しています。
レポート OK: チャネルが無効になり、結果として OK が報告されます。
レポート NOK: チャネルが無効になり、結果として NOK が報告されます。
レポート結果なし: チャンネルは無効になっており、結果には表示されません。
記号
記号は各製品のステータスを示します。各インジケータをポイントすると、ツールチップを取得することができます。
| 警告 |
| 予期しない |
| OK |
| 空 |
| 正しくないタイプ |
| 不足 |
同期締め付け用ツールボックス
コントローラー
コントローラーには次の 2 つのタイプがあります:
PF6000/PF8 Sync Reference
PF6000/PF8 Sync Member
ハードウェアレイアウト構成には、最大 63 つのSync Memberコントローラーを追加できます。[Sync Reference] コントローラーは常に最初に来ます。その後にSync Memberコントローラーとツールを追加する必要があります。
ツールボックス
ツールボックスには、2つのコントローラータイプとサポートされているすべてのツールが含まれています。特定のツールタイプでフィルタリングできるドロップダウンリストがあります。
ツールボックスからハードウェアレイアウト構成に追加できるのは、次の表に示すサポートされているツールのみです。同期締め付けコントローラーに接続されているサポートされていないツールは、ハードウェアレイアウト構成で [サポートされていないツール] アイコンで表示されます。これらのツールは、同期締め付け構成内の現在の位置で ToolsTalk 2 に表示され、この位置はハードウェアレイアウト構成ワークスペースで変更できません。サポートされていないツールがこのワークスペースから削除された場合、ユーザーはハードウェアレイアウト構成のセットアップを続行する前に、構成をコントローラーにプッシュしてツールを追加することができます。
ツールは、まだ接続されていないコントローラーにのみ追加できます。
ツールファミリー | サポートされているモデル |
Tensor STR | ETV、ETD、ETP |
Tensor ST | ETV、ETD、ETP |
Tensor SL | ETV、ETD、ETP、ETF |
Tensor SR | ETV、ETD、ETP |
QST | すべて |
FlexSystem 用のツールボックス
ツールボックスには、コントローラバージョンに有効なすべての製品が含まれています。
キャリア
キャリアには次の2つの種類があります:
3スロット
6スロット
構成には最大11のキャリアを含めることができます。コントローラ付きのキャリアは、常に最初のキャリアとなります。すべてのキャリアは、最初のキャリアの後にドロップする必要があります。
コントローラ
コントローラは、最初のキャリアの最初のスロットにしか追加できません。コントローラ製品をシステム内の他のスロットに追加することはできません。
ドライブ
ドライブは、最初のキャリアの最初のスロットまたはチャネル番号65のスロットを除く、すべての空きスロットに配置できます。詳細については、チャンネル番号付けのセクションを参照してください。
構成には最大64のドライブを含めることができます。
空白
空白は、任意のキャリアの、最初のスロットを除くすべての空きスロットに配置できます。
ファン
ファン製品は、キャリアの上部にしか取り付けできません。3キャリアには1つのファンモジュールがあり、6キャリアには2つのファンモジュールがあります。
非常停止
非常停止には次の3種類があります:
非常停止ASM
非常停止エントリー
非常停止バイパス
最初の2つの非常停止は、構成の最初のキャリアにのみドロップできます。他のすべてのキャリアに付けることが出来るのは、非常停止バイパスに限ります。
ツール
FlexシステムではQSTツールしか追加できません。ツールは、ツールが接続されていないドライブにのみドロップできます。
チャンネルの番号付け
システムの電源を入れると、チャンネル番号(ドライブインデックスとも呼ばれます)が各FlexDriveに割り当てられます。ドライブインデックスは、FlexCarrierの種類、およびFlexCarrierのどこにFlexDriveがマウントされているかによって異なります。
例:チャンネルの番号付け
キャリア 1 | スロット1 | スロット2 | スロット3 | スロット4 | スロット5 | スロット6 |
コントローラ | ドライブ | ドライブ | ドライブ | ドライブ | ドライブ | |
ドライブインデックス | - | 2 | 3 | 4 | 5 | 6 |
キャリア 2 | スロット1 | スロット2 | スロット3 |
|
|
|
ドライブ | ドライブ | ドライブ | ||||
ドライブインデックス | 7 | 8 | 9 |
[締め付けプログラム]タブの使用
締め付けプログラムのリスト表示
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
リストには次の列があります。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスにマークを付けて締め付けプログラムを選択します。 |
名称 | 締め付けプログラムの名前。プッシュインジケーター |
戦略 | 締め付けプログラムに選択されている締め付け戦略。 |
説明 | 各締め付けプログラムの[プロパティ]フィールドで説明されている締め付けプログラムの説明。 |
ライブラリのリンク | プログラムが、締め付けプログラムライブラリのグローバル締め付けプログラムにリンクされているかどうかを示します。 |
目標 | 最終締め付け目標は、トルク値または角度値で表されます。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | どのユーザーが最後に変更を加えたかを示します。 |
コントローラ更新 | コントローラにプッシュされた最終変更をコントローラ時間で表します。 |
コントローラ更新者 | どのユーザーが最後にコントローラーをプッシュしたかを示します。 |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
変更者のフィールドは、ToolsTalk 2 GUI を介して登録されている ToolsTalk 2 ユーザーになります。
コントローラ更新者のフィールドは、Web GUI またはコントローラ GUI を介して登録される ToolsTalk 2 ユーザーになります。
次の列は、検索ボックスのテキストでフィルタリングできます。名前、戦略、説明、ターゲット、および変更者。
コマンド | 説明 |
|---|---|
追加 | 新しい締め付けプログラムを作成します。 |
管理 |
|
本セクション内
締め付けプログラムメニュー
リストの各行は、マルチステップ締め付けプログラム 1 つを表します。
ヘッダー | 説明 |
|---|---|
チェックボックス | 特定の締め付けプログラムを選択するために使用します。 |
タイトル | ユーザ定義名。 |
戦略 | 締め付けプログラムに選択されている戦略。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
目標 |
|
最終変更 | ToolsTalk 2 時間で表す時間。 |
変更者 | <ユーザー> によって変更された締め付けプログラム |
コントローラ更新 | コントローラ時間で表したコントローラ更新。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
マルチステップ締め付けのはじめに
マルチステップ締め付けとは、複数のステップで行われる締め付けです。ステップ数およびステップのタイプは、行われる締め付けに応じて異なります。
たとえば、車にホイールを固定している5本のボルトを締め付けるには、通常多くのツールを使用してマルチステップの締め付けを並行して実行します。締め付けが正しく行われていることを確認するために、すべてのツールが同期して動作し、ほぼ同時に同じトルクに達するようにする必要があります。
こうした同期が確実に行われるようにするため、マルチステッププログラムでは同期点が使用されます。同期点で、各ツールは停止します。すべてのツールが同期点に到達すると、ツールは次の同期点に到達するまで次のステップに進みます。
同期点間のステップ数は柔軟で、1から10までが可能です。それぞれ異なるツール間で実行されてるマルチステップ プログラムを、同期点間で同数のステップ数にする必要はありません。マルチステップ締め付けプログラムは高度な構成が可能で、異なるマルチステッププログラムの実際のレイアウトは、それぞれ大きく異なる可能性があります。
例:マルチステップ締め付けプログラム

Pos |
|
A | ステップ1と2で、ツールをボルトにはめ込みます。 |
B | ステップ3で高速ランダウンが行われます。 |
C | ステップ4と5では、実際の締め付けを実行します |
D | ステップ6を使用してボルトからソケットを外します。 |
制限
制限は、予期しない事態が発生した場合に確実に締め付けを停止させるために使用します。これらの制限では、例えば、最大トルク設定に達していないかどうか、またはマルチステップ締め付けの一部の実行に時間がかかりすぎないかどうかをテストできます。各ステップには、それぞれ最大 4 つの制限を設けることができます。
モニター
モニターは、締め付けが仕様に従って行われたかどうかを確認するために使用します。例えば、角度制限やトルク制限などの確認が可能です。各ステップには、それぞれ最大 4 つのモニターを設けることができます。
同期モード
同期モードでは、異なる締付けプログラムを異なるツールで同時に実行することができます。同期モードの主な機能は、同期締め付けに含めるツールを定義し、各ツールが実行する締め付けプログラムを指定することです。
不良品管理
締め付けプログラムで問題が発生した場合、プログラムは修復を実行するか、プログラムを終了させる事が出来ます。
不良品管理は次のように機能します。すべてのツールが同期点に達すると、各ツールのステータスと合計ステータスが評価されます。同期点のすべてのチャンネルがOK(正常)であれば、プログラムは次のステップに進みます。NGがある場合、プログラムは設定された動作に従って修復または終了します。
本セクション内
締め付けプログラム履歴
ToolsTalk 2は、締め付けプログラムに加えられてコントローラにプッシュされた最後の10個の変更を追跡します。
すべての元の締め付けプログラムパラメータ設定と変更が示された印刷レポート。
すべての現在の締め付けプログラムパラメータ設定が示された印刷レポート。
締め付けプログラムの改訂履歴のリスト。希望するバージョンを選択して、置換コマンドボタンをクリックして、以前の締め付けプログラムパラメータ設定にすばやく変更することができます。
改正履歴は、プッシュコマンドが実行され、コントローラが ToolsTalk 2 から更新されると作成されます。
プラント構造ワークスペース
でコントローラを選択します。 締め付けプログラムアイコン
を選択します。締め付けプログラムをダブルクリックして、締め付けプログラム構成ワークスペースを開きます。
履歴コマンドボタンを選択します。
締め付けプログラム履歴の管理ポップアップウィンドウが開きます。
以前の締め付けプログラムの表示
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
行を 1 つクリックして改訂を選択します。
ウィンドウの右側に構成パラメータの詳細のリストが表示されます。
2 つの締め付けプログラムの改訂を比較できます。最初の締め付けプログラムを選択してから、キーボードの Ctrl ボタンを押したままで 2 番目の締め付けプログラムを選択します。続いて右側のウィンドウに両方の設定が表示されます。すべてのパラメータを表示することも、変更のみ表示 ボックスを選択して異なるパラメータのみを表示することもできます。
終了したら、閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
保管されている2つの締め付けプログラムの比較
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
保存されている締め付けプログラムから 2 つの締め付けプログラムを選択します。
選択した 2 つの締め付けプログラム間の比較が、右の列に表示されます。
閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
以前の締め付けプログラムへの切り替え
変更タブを選択します。
ウィンドウの左側に改訂履歴のリストが表示されます。
行を 1 つクリックして改訂を選択します。
ウィンドウの右側に構成パラメータの詳細のリストが表示されます。
置換コマンドボタンを選択します。
閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
締め付けプログラム履歴レポートの印刷
レポートタブを選択します。
印刷コマンドボタンを選択します。
印刷ダイアログウィンドウが印刷のために開きます。
終了したら、閉じるコマンドボタンを選択します。
ポップアップウィンドウを閉じます。
印刷されたレポートには、すべての構成とパラメータ値の完全なリストが含まれます。これに加えて、すべての改正と各改正で行われた変更が一覧表示されます。これで締め付けプログラムに行われた完全な履歴が示されます。いつ変更が行われたか、または ToolsTalk 2 からいつプッシュが行われたかをタイムスタンプで表示します。
関連情報
マルチステッププログラムの追加
追加ボタンを選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
締め付けプログラムの名前、インデックス番号 (締め付けの場合のみ)、を入力して、締め付け戦略にマルチステップを選択します。インデックスのアクティブな選択が行われていない場合、締め付けプログラムにはプログラムリストの次の続き番号が指定されます。
追加ボタンを選択します。
締め付けプログラムのコピーと貼り付け
締付プログラムはコピーして貼り付けることができます。次のルールは、固定具ファミリー (FlexSystem、PF8 同期締め付け、および PF6000 同期締め付け) のコントローラーに適用されます:
コピーと貼り付けは同じコントローラーで実行できます。
バージョン 3.8 以降では、固定コントローラー タイプ間でコピーと貼り付けを実行できます。
新しいコントローラーから古いバージョンのコントローラーにコピーと貼り付けすることはできません。
お互いに異なるコントローラータイプ間でコピーと貼り付けを行った場合に発生する可能性のある検証エラーは、修正する必要があります。
締め付けプログラムをコピーしたものには、付属する、または関連するプログラムのリンクなどすべてのものが常に含まれます。
例:
緩めプログラムが付属する締め付けプログラムをコピーしたもの > 貼り付けると、緩めプログラムが付属する締め付けプログラムが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
締め付けプログラムを選択します。作業スペース領域には利用可能なプログラムまたはシーケンスがすべて表示されます。
1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
マルチステッププログラムのインポート
マルチステップ プログラムのエクスポートとインポートには、締め付けプログラムのコピーと貼り付けと同じルールが適用されます。締め付けプログラムのコピーと貼り付け を参照してください。
追加ボタンを選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
インポートタブを選択します。
[ファイルを開く] を選択し、目的の場所からファイルを選択します。ファイルの形式は <template_name>.jsonにする必要があります。[開く] を選択します。
マルチステッププログラムの削除
各々の多段階プログラムを削除するには、ワークスペース領域の一番左の列にあるチェック・ボックスをマークしてください。
管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。
選択されたマルチステッププログラムが削除され、リストが更新されます。
マルチステップ締め付けプログラムの比較
締め付けプログラムでは、2つの異なるマルチステッププログラムを比較できます。
[締め付けプログラム]タブ
に移動し、プログラムの一覧で、比較する締め付けプログラムに対応するチェックボックスを選択します。締め付けと締め付け同士、緩めと緩め同士と、同じ動作モードのマルチステッププログラム同士のみを比較できます。
管理コマンドボタンを選択して、比較を選択します。
ワークスペースには、実際のマルチステッププログラムステップのグラフィック画像が表示され、比較エリアには、選択した2つの締め付けプログラムのパラメーターが表示されます。
[比較]ウィンドウでは、異なる特定のパラメーター値が赤で表示されます。差異のみを表示のチェックボックスを選択して、異なるパラメーター値のみを表示します。異なるパラメーターを含む「プロパティー」セクションと「ステップ」セクションには、青色のインジケーターが表示されます。
比較中の2つのマルチステッププログラムを編集することはできず、構成エラーまたは警告は表示されません。
グローバル締め付けプログラム
締め付けプログラムはローカルかグローバルのいずれかです。締め付けプログラムがグローバルの場合、締め付けプログラムのリストのライブラリのリンクの列にはいが示されます。
ローカル締め付けプログラムは単一のコントローラになります。
締め付けプログラムのリスト表示
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
ローカル締め付けプログラムは締め付けプログラム タブでのみ編集できます。
ローカル締め付けプログラムは、締め付けプログラムライブラリ には表示されません。
グローバル締め付けプログラムは、締め付けプログラムに登録されている複数のコントローラに有効です。グローバル締め付けプログラムは締め付けプログラムライブラリあります。
ライブラリへのアクセス
左側のメニューバーでライブラリ
を選択します。 上部のメニューバーで締め付けプログラムライブラリ
を選択します。 締め付けプログラムライブラリに、グローバル締め付けプログラムのリストが表示されます。
コントローラがグローバル締め付けプログラムに登録されている場合、これは締め付けプログラム に表示されますが、編集はできません。
グローバル締め付けプログラムは締め付けプログラムライブラリ のみから編集できます。
締め付けエディタ
ボタン
タイトル | 説明 |
|---|---|
ディスプレイ |
|
ズームイン | 締め付けプログラムを拡大表示にします。 |
ズームアウト | 締め付けプログラムを縮小表示にします。 |
画面に合わせる | ドラッグアンドドロップエリアに締め付けプログラム全体が表示されるように合わせます。 |
削除 | 選択項目を削除します。 |
修復領域
修復領域のステップは、同期点の状況がNGの場合に従うべき修復パスを示しています。
修復パスは常に同期点で開始および終了します。修復パスが再び締め付けパスに入る必要がある場所は柔軟ですが、修復パスは常にプログラムの先頭方向に戻る必要があります。
各同期点で開始できる修復パスは1つだけですが、複数の修復パスが同じ同期点で終了することは出来ます。
修復パスでは1~3ステップを実行する事が出来ます。
プログラムの開始から修復パスを定義することはできません。
例:修復パス
A | 最初の同期点からプログラムの開始点までのパスを修復します。 |
B | 3番目の同期点から2番目の同期点までの修復パス。 |
締め付けエリア
締め付け領域には、締め付け経路、つまり修復および終了経路を除いたマルチステップ締め付けプログラムのステップおよび同期点が含まれます。
締付けステップ数、制限事項、および許可されるモニター数
許容されるステップ数 | 許容される制限の数 | 許可されるモニター数 | |
|---|---|---|---|
PF6000/PF8 | 16 | 8 | 8 |
PF6000/PF8 Step Sync | 25 (同期ポイント、修復パス、終了パスを除く) | 8 | 8 |
Flex | 25 (同期ポイント、修復パス、終了パスを除く) | 8 | 8 |
IxB | 16 | 5 | 8 |
終了エリア
終了エリアのステップは、同期点の状況が致命的である場合に、たどる終了パスを示します。終了パスが完了すると、締め付けは終了します。終了パスは常に同期点から始まります。各同期点で開始できる終了パスは1つだけです。
終了パスで実行するステップ数は、1 ~ 3 です。
いつでもすべての同期点で終了することが出来ます。終了パスが定義されていない場合、プログラムは他のステップを実行せずに直接最後まで移動します。
例:終了パス
A | 最初の同期点からプログラムの終わりまでの終了パス。 |
B | 3番目の同期点からプログラムの終わりまでの終了パス。 |
構成
ステップ、制限、またはモニターを選択し、画面の下部にある構成をクリックして構成フィールドを開きます。複数のステップを選択するには、Ctrl を使用します。
[構成] フィールドには、修復エリアでどのステップ、モニタ、または制限が選択されているかに基づいた、ステップ、モニタ、および制限に対するさまざまなパラメータが含まれます。
必要なパラメータを入力します。
モニタまたは制限を削除するには、そのフィールドに表示されている 削除を選択します。
スピードシフトの使用
ステップ中に速度が変わる、角度トリガまたはトルクトリガを1~5個定義できます。
速度シフトは、[構成] フィールドに追加できます。
1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。
スピードシフトを追加するには:
スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加をクリックして、角度範囲またはトルク範囲を選択します。スピードシフトの角度/トルクのフィールドが開きます。
以下の表に従って値を追加します。
パラメータ | 説明 |
|---|---|
角度/トルク トリガー | > 0 であること。 |
速度 | > 0 であること。 |
速度ランプタイプ | ハードまたはソフト。 |
トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。
トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。
締め付けプログラムに警告が示されるとコントローラに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。
ツールボックス
ツールボックスには以下が含まれます:
ドラッグアンドドロップエリアのショートカットキー
ショートカットキー | 説明 |
|---|---|
スペースバー + カーソル | ドラッグ&ドロップエリアを移動します。 |
ドラッグアンドドロップエリアの機能
機能 | 説明 | |
|---|---|---|
|
|
|
ステップの追加 | | ツールボックスでステップをつかみます。希望する位置にステップをドラッグします。可能な位置は水色の指示矢印で示されます。 |
___________ | __________________________ | _________________ |
ステップのマーク | | ステップをクリックしてマークします。 |
___________ | __________________________ | _________________ |
ステップの移動 | | ステップを移動させるには、ステップをクリックして、ボタンを押したままで動かします。 |
___________ | __________________________ | _________________ |
ステップのコピー | | ステップをコピーするには、[Ctrl] ボタンをクリックしながら、ステップをドラッグアンドドロップします。 |
___________ | __________________________ | _________________ |
修復パスの追加 | | 修復パーツを開始する同期点の上にステップを配置します。 |
___________ | __________________________ | _________________ |
修復ステップを追加 | または | 修復ステップを追加するには、修復エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 修復パーツを開始する同期点の上にステップを配置します。その後、ステップは修復パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
終了パスの追加 | | 終了部分を開始する位置から同期点の下にステップを配置します。 |
___________ | __________________________ | _________________ |
終了ステップを追加 | または | 終了ステップを追加するには、終了エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 終了部分を開始する位置から同期点の下にステップを配置します。その後、ステップは終了パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
修復パスの終点を移動します。 | | 小さな矢印をクリックして修復パスの終点を移動します。 |
___________ | __________________________ | _________________ |
制限とモニターの追加 | | ツールボックスで制限またはモニタをつかみます。制限またはモニタを目的のステップにドラッグします。制限またはモニタを追加できるステップは、明るい青色に変わることによって示されます。 |
___________ | __________________________ | _________________ |
禁止されている配置 | | 赤の矢印は、ステップを配置できないことを示します。 |
|
|
締め付けステップ
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
一般パラメーター
以下のステップ パラメータは多数のステップタイプで共通です。パラメータは、締め付けプログラムでステップを選択するときに表示されるステッププロパティウィンドウで設定しす。
パラメーター | 説明 |
|---|---|
名称 | ステップの名前。 |
回転方向 | 各締め付けステップは、前方 (ネジを締め付ける) または後方 (ネジを少し緩める) のいずれかで実行できます。矢印がこの方向を示します。角度に合わせて締め付け、トルクに合わせて締め付けなど、多くの締め付けステップには方向が前方にハードコードされています。角度に合わせて緩めやトルクに合わせて緩めなどのステップでは、方向が後方(逆方向)に自動的に設定されます。 リバースの設定は 、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールでは使用できません。締め付けプログラムの締め付け方向は、締め付けの実行を可能にするために、オープンエンドツールの締め付け方向と同じである必要があります。オープンエンドツールの締付けプログラムに緩めプログラムを割り当てることは可能ですが、方向スイッチが緩めプログラムを実行するように設定されている場合、ツールはロックされます。 |
ステップカテゴリ | 各ステップに、ステップカテゴリを選択するオプションがあります。ステップカテゴリを選択すると、NG 締め付けが、関連する詳細ステータスと該当するマルチステップエラー情報を示してイベント結果ビューにリスト表示されます。選択しないと、削除されたステータスは「未分類マルチステップエラー」に設定されます。関連する削除されたステータスは分類できます。 |
角度ウィンドウ | ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。 |
速度ランプ/加速(ToolsTalk 2でのみ使用可能) | ほとんどのステップで、目標速度までの加速を達成する方法を指定できます。ハード、ソフト、手動の 3 つの設定が指定できます。ステップが開始されるたびに、定義された加速が使用されます。ツールがステップの開始時に異なる速度ですでに作動していても、これに関わらずランプが使用され、ステップの目標速度まで加速されます。ステップの開始時の速度が目標速度より速い場合または遅い場合でも、同様となります。 |
速度ランプ - ハードおよびソフトモード |
|
速度ランプ - 手動モード |
|
スピードシフトの使用 | 速度がシフトするステップ中に、1~5個のアングルトリガーまたはトルクトリガーを定義することができます。 1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。 トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。 トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。 トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。 トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。 締め付けプログラムに警告が示されるとツールに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。 速度シフトは、[構成] フィールドに追加できます。スピードシフトを追加するには: スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加を選択します。次に、角度範囲またはトルク範囲を選択します。
|
ブレーキタイプ | マルチステップ締め付けプログラムの制動動作は、プログラムの2つの場所で制御することができます。締め付け方向の逆転に先行するステップ、および/または締め付けプログラムの最終ステップの2つの場所です。締め付けプログラムの他の場所にあるステップの一般設定から、制動パラメータを使用することはできません。制動はエルゴ停止または 慣性のいずれかに設定できます。エルゴ停止 はより人間工学的な締め付けの減速を可能にする一方、慣性 は工具を完全に制動します。 慣性には追加パラメータはありません。 エルゴ停止パラメータ
|
MCT モードで除外 | マルチステッププログラムのステップでは、[MCT モードで除外] オプションをオンにすることができます。マルチステッププログラムで MCT モードを使用する場合、[MCT モードで除外] がオンになっているステップは除外されます。 待機ステップまたは方向切り替えの前に間を置かれないように [MCT モードで除外] オプションをオンに設定してしまうと、MCT モードで実行時にエラーが発生します。 終了パスと修復パスは固定式システムでは無視されます。つまり、これらがトリガーされた場合、締め付けは NG MC 締め付けとしてマークされます。 MCT モードはテスト時にのみ使用してください。ツールを生産ラインに戻す前に、MCT モードが無効になっていることを確認してください。 |
次の締め付け手順は、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
A – 角度に合わせて締め付け/角度に合わせて緩め
TrR – トリガーリリースに合わせて緩める
T - トルクに合わせて締め付け/トルクに合わせて緩め
E – 噛み合わせ
SR - ソケット解除
DT – DynaTork に合わせて締め付け
TPT - TensorPulse トルクに合わせて締める / トルクに合わせて緩める
IT - インパルス トルクに合わせて締める / トルクに合わせて緩める
IA – 角度に合わせてインパルス締め付け/角度に合わせてインパルス緩め
AP - アダプティブパルス
ITrR – トリガーリリースに合わせてインパルス緩め
トレース設定
トレース構成がプログラムレベルで有効になっている場合、トレース分解能はステップレベルで構成できます。トレース設定の設定は、特定の各ステップでサンプリングを行う方法を定義します。
パラメーター | 説明 |
|---|---|
トレース設定 |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します (0.25 〜 1000 ミリ秒) |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度) |
このトレース記録では、サンプルレートはすべてのステップで同じではなく、サンプルレートは各ステップの構成に依存します。つまり、トレースはステップごとに1つのトレースに分割されます。
トレース内のサンプルの最大数は4096です。
締め付けによって4096個を超える値が生成される場合、ダウンサンプリングが実行されます。これは、締め付け全体から1秒おきのトレースサンプルを削除し、半分の分解能で記録を続行することによって行われます。このプロセスは、4096のサンプル制限に達するたびに繰り返されます。
合計で2048個以上が記録された場合、このプロセスにより、2048~4096個のサンプルがトレースされます。
4096 のサンプル個数の制限に達すると、設定されたトレースサンプル倍数に従わなくなります。代わりに、ダウンサンプリングが行われた回数に応じて、サンプル倍数が2倍または4倍などとなります。ただし、すべてのステップがダウンサンプリングされるため、ステップ間の関係は変わりません。ステップが別のステップと比較して2倍のサンプル時間で構成されていた場合でも、ダウンサンプリングが何回行われたかにかかわらず、最終トレースではこのサンプル時間が引き続き適用されます。
トレースチャンネル | 注記 |
|---|---|
トルク | トルクトランスデューサーを装備したすべてのツールで利用可能 |
角度 | すべてのツールで利用可能 |
トルク秒 | 2つのトルクトランスデューサーを備えたツールでのみ使用可能 |
角度秒 | 2つの角度トランスデューサーを備えたツールでのみ利用可能 |
電流 | すべてのツールで利用可能 |
勾配 | ステップ/制限/モニターが勾配値を生成する場合に使用可能 |
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 角度に合わせて締め付け/角度に合わせて緩め
ツール |
|---|
ES STR SL ST SR QST STB IxB |
A – 角度に合わせて締め付け
このステップでは、目標角度に達するまでツールが作動します。目標角度は、ステップの開始から測定されます。
A - 角度に合わせて緩める
このステップは、角度目標に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
パラメーター
パラメーター | 説明 |
|---|---|
目標角度 | 目標の角度。> 0 であること。 |
速度 | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標角度 |
マイクロビデオ
DI – デジタル入力まで実行
ツール |
|---|
ES STR SL ST SR QST |
この手順では、[デジタル入力]で指定された入力が[停止条件]の値に応じて高または低になるまで、パラメーター方向によって定義された方向にツールを作動させます。
パラメーター | 説明 |
|---|---|
向き | 前方向または後方向 |
デジタル入力 | コントローラー上の次のローカルデジタル入力のいずれかを選択できます。
|
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
停止条件 |
|
速度 (rpm) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合に使用できます。既定:500 rpm/s。 |
マイクロビデオ
DT – DynaTork に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、 目標トルクに達するまで、ツールを速度nで順方向に作動させます。その後、ツールは DynaTork 時間中、目標トルクの DynaTork パーセンテージで電流を一定に保持します。
ツールの過熱を避けるため、ツールの最大トルクの 40% を超えて DynaTork を作動させないことを強く推奨いたします。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
DynaTork 時間 | DynaTorkがアクティブになる時間。 |
DynaTork パーセント | トルクターゲットのパーセンテージ。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 (rpm) | 既定:60 rpm。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | DynaTork 時間中に保持されるトルクレベル |
C | Ts のパーセンテージ |
D | Ts のパーセンテージ |
E | DynaTork 時間中に保持されるトルクレベル |
F | DynaTork 時間 |
マイクロビデオ
E – 噛み合わせ
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、ソケットがネジに噛み合うまで両方向にツールが作動します。ステップは、噛み合わなければ継続がはいに設定されている場合は、目標トルクまたは目標角度に達するまで継続します。いずれかの方向で目標角度に達すると、方向が反転します。噛み合わせの最大試行回数を入力すると、検索の繰り返し回数を制限できます。いずれかの方向で目標トルクに達すると、ステップは OK のステータスで終了します。
マイクロビデオ
Ext - 外部結果
ツール |
|---|
ES STR SL ST SR QST STB IXB BCP BCV 外部ツール |
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。この外部信号は、デジタル信号をコントローラに供給できるあらゆる手段 (I/O バスを介して) を介して供給できます。
信号が送信されると、結果ビュー (記録されているデータ) は、締め付けプログラム (指定されたトルク値、角度値、またはテキスト文字列) で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
パラメータ | 説明 |
|---|---|
トルク <目標トルク> | 希望する表示された目標トルク値の数値。例えば、クリック式レンチからの信号は <目標トルク> と表示されます。 |
角度 <目標角度> | 希望する表示された目標角度値の数値。例えば、クリック式レンチからの信号は <目標角度> と表示されます。 |
テキスト | 希望する表示されたテキストの英数字文字列。例:「オイルが交換されました」。 |
MWR - メカトロニック レンチ
ツール |
|---|
MWR |
メカトロニック レンチは、メカトロニック レンチ(MWR)と組み合わせてのみ使用できる特殊なステップです。
このステップは、他のステップと組み合わせて使用することはできません。このステップでは、制限は使用できません。デフォルトでは、このステップには次の3つのモニターがあります。ピークトルク、角度、およびクリックです。
パラメータ | 説明 |
|---|---|
緩め制限 | 締付け結果がNG(締め付け方向の間違い(緩め))とマークされた負のトルク(すなわち緩め方向のトルク)の数値。 (Nm)単位。 |
ツールサイズ | MWR-TAに取り付けられたエンドフィッティングツールの特定の長さの数値。(mm)単位。 |
ツールベンド | MWR-TAに取り付けられたエンドフィッティングツールの数値。 (°/Nm)単位。 |
リヒット角度ウィンドウ | トルクに達した場合に既にねじが締め付けられているかどうかを判断するための角度の数値。 (°)単位。 |
最大角速度 | ねじを締めることができる最大速度の数値。(°/ s)単位。 |
RD – ランダウン
ツール |
|---|
ES STR SL ST SR QST IxB |
ランダウンステップは、ネジがスレッドに入ってからネジヘッドが下位面に触れて着座ポイントに達する直前までの締め付けです。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
このステップは順方向の速度でツールを実行します。ランダウンタイプ、トルク、または着座に応じて、ステップの動作は次のとおりとなります:
ランダウンタイプ:トルクに合わせる:指定された目標トルクが見つかるとステップは停止します。
ランダウンタイプ:着座に合わせる:着座の勾配計算は、指定されたトルクトリガレベル Tt で始まります。トルクトリガが設定されていない場合は、ステップの開始時に勾配計算が開始されます。
勾配の計算は、 A d度離れた2つの角度点の間で行われ、次のように計算されます:(Tn – Tn-1)/(An – An-1)および、互いに続く2つの勾配がTSLOPEより大きくなるとすぐに 、着座点が見つかります。
パラメーター | 説明 |
|---|---|
ランダウンタイプ | トルクに合わせる または 着座に合わせる。 |
目標トルク | 既定:「設定なし」> 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
トリガートルク | ランダウンタイプが着座に合わせるである場合、[トリガートルク]フィールドが表示されます。 既定:「設定なし」> 0 であること。 |
デルタ角度 | ランダウンタイプが着座に合わせるである場合、 デルタ角度フィールドが表示されます。 既定:「0」> 0 であること。 |
トルクレート | ランダウンタイプが着座に合わせるである場合、[トルクレート]フィールドが表示されます。 既定:「0」> 0 であること。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 着座ポイント |
B | 角度デルタ |
C | トルクスロープ |
D | トルク目標 |
E | トルクトリガー |
SR - ソケット解除
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップは、目標角度に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
マルチステップ締め付けプログラムの締め付けパスの最後のステップとしてのみ、このステップの使用は許可されています。ただし、このステップの後に同期点を追加することは可能です。
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。 既定:3 度、0を超える必要があります |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
SZP - ゼロ位置を設定
ツール |
|---|
ES STR SL ST SR QST |
「ゼロ位置を設定」ステップは、信号設定ゼロ位置をツールに送ります。位置は360度ごとに1回繰り返されます。
「ゼロ位置まで緩める」または「ゼロ位置まで締める」の手順で、ツールをゼロ位置に戻すことができます。
このステップにはパラメータがありません。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
T - トルクに合わせて締め付け/トルクに合わせて緩め
ツール |
|---|
ES STR SL ST SR QST STB IxB |
T - トルクに合わせて締め付け
このステップでは、目標トルクに達するまで、プログラムされた速度でツールを順方向に実行します。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
マイクロビデオ
T – トルクに合わせて緩める
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップでは、逆方向にこの速度でツールを作動させます。ステップを有効にするには、トルクが最初に目標トルクの110%を超えている必要があります。目標トルクは正の値に設定する必要があります。目標トルクに達すると、トルクが目標トルクを下回るまでステップが実行されます。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
T&A – トルクと角度まで締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この締め付けステップは、目標トルクおよび目標角度の両方に到達するまで、指定した速度でツールを順方向に実行します。
トルクの測定は、ステップの最初から開始します。
トルクトリガーが設定されていない場合、角度の測定はステップの開始時に開始されます。
トルクトリガーが設定されている場合、トルクトリガーに達した時点で角度測定が開始されます。
このステップは次の場合に終了します:
測定されたトルク >= 目標トルク (Ts)
AND
(測定された角度 - トルクトリガーで測定された角度) >= 目標角度 (As)。
パラメーター | 説明 |
|---|---|
目標トルク(Ts) | 既定値:0. |
目標角度(As) | 既定値:0. |
トルクトリガ(Tt) | 既定値:未設定。0 より大きく、かつ目標トルク (Ts) 未満であること。 |
速度(n) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | 目標角度 |
T|A – トルクまたは角度に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この締め付けステップでは、目標トルクまたは目標角度に到達するまで、指定した速度でツールを順方向に実行します。
トルクの測定は、ステップの最初から開始します。
トルクトリガーが設定されていない場合、角度の測定はステップの開始時に開始されます。
トルクトリガーが設定されている場合、トルクトリガーに達した時点で角度測定が開始されます。
このステップは次の場合に終了します:
測定されたトルク >= 目標トルク (Ts)
OR
(測定された角度 - トルクトリガーで測定された角度) >= 目標角度 (As)。
パラメーター | 説明 |
|---|---|
目標トルク(Ts) | 既定値:0. |
目標角度(As) | 既定値:0. |
トルクトリガ(Tt) | 既定値:未設定。0 より大きく、かつ目標トルク (Ts) 未満であること。 |
速度(n) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | 目標角度 |
T+A – トルクと角度に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップでは、目標トルクに達するまでツールを作動させます。この時点から、追加の目標角度まで継続して作動します。
パラメーター | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
目標角度 | 目標の角度。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | 目標角度 |
TC – トルク校正
ツール |
|---|
QST |
この手順は、複数トランスデューサーツールでのみサポートされています。
トルク校正 ステップでは、目標トルクに達するまで、指定した速度でツールを順方向に実行します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
速度 | > 0 であること。既定:60 rpm。 |
トランスデューサー | トルク または トルク 2。既定:トルク。 フロントトランスデューサーを校正するには、[トルク 2] に設定します。 |
適合型制動 (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
ThCT – トルクに合わせてスレッドカット
ツール |
|---|
ES STR SL ST SR QST STB IxB |
トルクに合わせてスレッドカット機能では、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ネジを用いて金属の薄層を締め付ける際などの締め付けが可能になります。ツールは、スレッドカット角度 (Aw) に達するまで前方向に作動します。スレッドカット角度ウィンドウは、トルクがスレッドカットトリガートルク (Ttc) を初めて超える時点から測定されます。スレッドカット角度に達した点から、ステップは目標トルク (Tt) に達するまで連続して作動します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
スレッドカット角度ウィンドウ | 既定:0.> 0 であること。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | 目標トルク |
B | トルクトリガー |
C | スレッドカット角度ウィンドウ |
TPT - TensorPulse トルクに合わせて締める / トルクに合わせて緩める
ツール |
|---|
STR IxB |
TensorPulseの締め付け/緩めステップを使用する前に、次のライセンスタイプがコントローラーにインストールされている必要があります。
低反力戦略
TensorPulseは、次のツールでのみ有効です:ETV-STR61-100-13、ETV-STR61-70-13、ETV-STR61-50-10、ITB-P。
このステップは、オープンエンドまたはクローズエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールをサポートしていません。
TensorPulse トルクに合わせて締め付け
このステップは、トルク目標に到達するまで、順方向に締め付けパルスを生成します。
TensorPulse トルクに合わせて緩める
このステップでは、トルクがトルク目標を下回るまで、逆方向の締め付けパルスを生成します。
TensorPulse締め付け/緩めステップを実行する場合は、必要な PulseDrive ソケット/アダプターを使用してください。
TensorPulse締め付け/緩めステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けが NG となります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメーター | 説明 |
|---|---|
トルク目標 - Ts | トルク目標は、0からツールの最大トルクまでの範囲である必要があります。 |
パルスエネルギー - Pe | パルスエネルギーは、各パルスのエネルギー/電流の量を制御するために使用されます。 パルスエネルギーは10%から100%の範囲である必要があります。 |
反力調整係数 | 反力調整係数は、TensorPulse ステップを実行する際の反力を調整するために使用されます。各パルスの後にツールを反対方向に動かすのは力です。 反力調整係数は、0〜100%の範囲である必要があります。 |
トレースでは、角度反転は、ツールが後方に回転してパルスを有効にすることを意味しますが、PulseDriveソケット/アダプターにより、ボルトヘッドは必ずしも後方に回転するわけではありません。
TrR – トリガーリリースに合わせて緩め
ツール |
|---|
ES STR SL ST SR STB IXB |
このステップは、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
このステップは、ツールトリガが解除される(緩められる)まで逆方向に作動します。これは、プログラムの最後のステップとしてのみ使用できます。
STB ツールでは、このステップは緩めプログラムのみに適用されます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
TTC – クラッチに合わせて締め付け
ツール |
|---|
XCB |
このステップでは、クラッチが解放されるまで、プログラムされた速度を順方向に実行します。工具がクラッチの解放を報告すると、ステップは OK ステータスで終了します。
クラッチに合わせて締め付けの締め付けは XCB ツールでのみ有効です。
パラメーター | 説明 |
|---|---|
変速 | 角度またはトルク |
トリガー角度/トリガートルク | 速度が変化するトリガー角度 (度) またはトリガートルク (Nm)。 |
速度 | 目標速度 (rpm) |
速度ランプタイプ | 切り替えてスピードランプのタイプを選択します: ハード、ソフトまたは手動 |
TTTR - トリガー解除まで締める
ツール |
|---|
ES STR SL ST SR STB IXB |
このステップは、ツールトリガが解除される(締め付けられる)まで作動します。締め付けプログラムの最後のステップとしてのみ使用できます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
W – 待機
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップでは、ツールは待機タイプ条件が満たされるまで待機します。待機中はツールが回転しませんが、 ホールド条件を指定できます 。
パラメーター | 説明 |
|---|---|
待機タイプ |
|
待機時間 | ツールが静止する秒数 - [待機タイプ] で [時間] が選択されている場合にのみ有効です。 |
ホールド条件 |
|
WP - レンチ生産
ツール |
|---|
STwrench |
STwrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチ生産 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
目標トルク | 締め付けステップに対するターゲットトルクを定義します。 |
トルク測定点 | トルクを測定する場所を指定します。 [ピークトルク] または [ピーク角度]のいずれかを選択します。
|
角度検索制限 | これは、締め付けのトルク結果値を設定するために使用されるオフセットです。このパラメータを使用するには、 測定トルクをピーク角度に設定する必要があります。 |
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
終了サイクル時間 | 終了サイクル時間を示すミリ秒 (ms)単位の数値。トルクがランダウン完了を下回ったときに適用されます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
補正値 | [平均トルク]または[ピークトルク]から選択します。補正値は、PVTの計算方法を指定します。 平均トルク - PVTは、以下を使用して計算された平均に基づきます:
ピークトルク - PVTは、着座が検出される前に測定されたピーク値に基づきます。 |
遅延監視 | PVT計算は、このウィンドウを通過する前に開始されず、締め付け開始時に開始されます。 |
PVT 間隔 | PVT距離ポイントから開始して、PVTウィンドウを計算する角度を設定します。 |
PVT 距離 | システムがPVTウィンドウを開始する着座前の角度を設定します。 |
プリベイリングトルク最小 | プリべリングトルクの下限。 |
プリベイリングトルク最大 | プリべリングトルクの上限。 |
マイクロビデオ
WQ - レンチの品質
ツール |
|---|
STwrench |
STwrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチの品質 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
Y – 降伏に合わせて締め付け
ツール |
|---|
ES STR SL ST SR QST IxB |
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点は、トルクと角度の距離測定を基に計算されるトリガートルクレベルをトルクが超えてから、トルク勾配を監視して検出されます。角度距離パラメータは、指定されたジョイントのハードさに応じて設定されます。
勾配角度ウィンドウを設定します (ハードジョイント、ソフトジョイント、角度ウィンドウの手動設定)。手動を選択する場合、角度ウィンドウを設定する必要があります。ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
パラメーター | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | 角度の測定は、このトリガから開始します。> = 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
降伏点のパーセンテージ | >= 20% であること |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | ピーク勾配 |
B | 降伏点 : |
C | シャットオフポイント |
D | 角度距離 |
E | トルクトリガー |
UM 2- 降伏に合わせて締め付け方法 2
ツール |
|---|
QST |
このステップでは、降伏点が検出されるまで、指定した速度でツールを順方向に実行します。
降伏点の検索は、トルクがTtに達したときに開始されます。Af度にわたるトルクの平均が計算されます。この手順はN rs回繰り返されます。
参照傾斜は、N rsにわたる線形回帰で計算されます。この後、新しい平均値は、A f の度数にかけて、継続的に計算されます。
実際の傾斜は、最後のN sの平均点にわたる線形回帰で計算されます。傾斜が参照傾斜のPy %より小さい場合、降伏点に達します。
パラメーター | 説明 |
|---|---|
目標トルク | > 0 であること。 |
フィルタ角度 | 既定:1.> 0 であること。 |
サンプル数 | 既定:6.>=4 であること。 |
pf サンプル数、基準 | 既定:6.>=4 であること。 |
降伏点のパーセント | 既定:90%。>20% であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ (Power Focus 6000 同期締め付け Power Focus 8 同期締め付け、および Flex でのみ有効)。 | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
詳細については、画像をポイントしてクリックしてください。
A | トルクトリガー |
B | サンプル数、参照 |
C | 実際の勾配 |
D | サンプル数 |
E | 基準勾配 |
F | フィルタ角度 |
ZP - ゼロ位置まで緩める
ツール |
|---|
ES STR SL ST SR QST |
このステップは、ゼロ位置に達するまで、ツールを逆方向に速度(N)で回転させます。ゼロ位置に到達するために回転する角度合計が最小角度 (Am) 度より小さい場合、回転はさらに 1 回転、360 度継続します。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
パラメーター
パラメータ | 説明 |
|---|---|
最小角度 | 最小角度 (Am) [°] |
速度 | 回転速度 (N) [rpm] デフォルト値は 60 rpm です。 |
ZP - ゼロ位置まで締める
ツール |
|---|
ES STR SL ST SR QST |
このステップは、ゼロ位置に達するまで、ツールを正転方向に速度(N)で回転させます。ゼロ位置に到達するために回転する角度合計が最小角度 (Am) 度より小さい場合、回転はさらに 1 回転、360 度継続します。
ゼロ位置は、「ゼロ位置の設定」ステップまたは信号「ゼロ位置の設定」のいずれかで保存された特定の位置です。位置は360度ごとに1回繰り返されます。
パラメーター
パラメータ | 説明 |
|---|---|
最小角度 | 最小角度 (Am) [°] |
速度 | 回転速度 (N) [rpm]デフォルト値 60 rpm |
ステップモニター
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
ステップモニターは、角度制限やトルクなど、指定に従って締め付けが達成したことを検証する際に使用されます。各ステップには必須ステップモニターとオプションのステップモニターがあります。必須のモニターは、新しいステップをマルチステッププログラムにドラッグするときに含まれます。オプションのモニターは柔軟に設定でき、必要に応じてマルチステッププログラムに配置できます。各ステップには、それぞれ最大 8 つのモニターを設けることができます。
次のモニターは、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップモニター | 適用可能なステップ |
|---|---|
角度 | すべて |
ピークトルク | すべて |
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 角度
ツール |
|---|
ES STR SL ST SR QST STB IxB MWR-TA |
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。
角度の測定は、モニターの開始時、または指定されている場合は、モニター中に初めてトルクがトリガートルクを通過する時点から開始されます。
パラメーター | 説明 | デフォルト値 |
|---|---|---|
停止条件 | 角度測定の終了位置を指定します。
| シャットオフ |
トリガートルク | 角度の測定は、このトリガから開始します。 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 設定なし |
下限 | 最小許容角度 最小限度:0 以上である必要があります 最大限度:9 999 999 未満、かつ上限未満である必要があります | 設定なし |
上限 | 最大許容角度 最小限度:0 より大きく、かつ下限値より大きい必要があります 最大限度:9 999 999 未満である必要があります | 設定なし |
結果値
測定角度:モニターで測定された角度。
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 角度高制限 |
B | トルクトリガー | E | 測定角度 |
C | 角度低制限 | F | ステップ |
詳細については、画像をポイントしてクリックしてください。
A | ピークトルク | E | 角度高制限 |
B | シャットオフポイント | F | 測定角度 |
C | トルクトリガー | G | ステップ |
D | 角度低制限 |
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 角度高制限 |
B | トルクトリガー | E | 測定角度 |
C | 角度低制限 | F | ステップ |
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | D | 測定角度 |
B | 角度低制限 | E | ステップ n-1 |
C | 角度高制限 | F | ステップ n |
AZP - ゼロ位置に調整
ツール |
|---|
QST |
このモニターは、プログラムの早い段階でゼロクロスモニターで測定した真のゼロクロス位置に戻るために使用されます。バックラッシュ角度は、プログラムの早い段階で測定された場合に使用されます。
パラメーター | 説明 |
|---|---|
低速 | 減速距離に到達したときに使用される速度。0 < [減速距離] < [速度] の範囲にする必要があります。 |
ゼロ位置調整 | ゼロクロス値からの目標位置。-9,999,000 よりも大きく、かつ 9,999,999 未満である必要があります。 |
減速距離 | 低速を使用する目標以前の角度。0 以上かつ 9,999,999 未満である必要があります。 |
速度 | 既定:60 rpm。ツール最大速度未満であること。 |
速度ランプタイプ | ハード、ソフトまたは手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
BA - バックラッシュ角度
ツール |
|---|
QST |
このモニターは、ソケットのバックラッシュ角度を監視します。バックラッシュ角度測定ステップで使用します。
パラメーター | 説明 |
|---|---|
上限 | 角度上限。9,999,999 未満であること。 |
BM -バックラッシュ角度測定
ツール |
|---|
QST |
このモニターは、ソケットのバックラッシュ角度を測定します。得られた角度は、ゼロ位置調整モニターの計算に使用されます。
パラメーター | 説明 |
|---|---|
向き | 測定が終了した方向。 |
目標トルク | トルク目標。>= 0 であること。 |
速度 | 既定:60 rpm。>= 0 であること。 |
速度ランプタイプ | ハード、ソフトまたは手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
C - 電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、トルクがトルクトリガーを通過した後の任意の時点における実際の電流を測定します。結果は、モニターを NG にした最初のピーク値または低い値になります。OK の場合、結果は最後に測定した電流値になります。モニター中にトルクトリガーに到達しない場合は、NG ステータスで終了し、測定値はありません。
パラメータ | 説明 |
|---|---|
トルクトリガ | > = 0 かつ < ツール最大トルクであること。 |
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
Cl - クリック
ツール |
|---|
MWR-T MWR-TA |
このステップモニターは、IxB ツールでは使用できません。
クリックトルクとクリック角の結果を有効にするためのモニターです。このモニタには設定がなく、MWRのステップでのみ使用できます。
LD - 緩め検出
ツール |
|---|
STwrench |
このステップモニターは、STwrench ツールでは使用できません。
このモニターを使用して、トルクと方向をチェックし、 STwrench のレンチ生産ステップ戦略を使用している場合に緩めが試みられてたかどうかを確認できます。かけられたトルクが、プログラムで構成されたねじ方向と反対方向の緩め制限に対して設定された値を超えた場合、結果はNGとして報告されます。
MT – 平均トルク
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、モニター中に平均トルクを測定し、計算値が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
タイプ | 開始条件を指定します:
|
トルクトリガ | [タイプ] が [トリガートルク]、[角度トリガー]、または [角度ウィンドウ]に設定されている場合に使用できます。> = 0 かつ < ツール最大トルクであること。 |
角度トリガ | [タイプ] が [角度トリガー] または [角度ウィンドウ]に設定されているときに使用できます。> 0 であること。 |
角度ウィンドウ | [タイプ] が [角度ウィンドウ]に設定されている場合に使用できます。> 0 であること。
|
時間間隔 | [タイプ] が [時間間隔] に設定されている場合に使用できます。> 0 であること。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PC - パルスカウント
ツール |
|---|
STR |
このステップモニターは、次ツールでは使用できません。
ETV-STR61-100-13
ETV-STR61-70-13
ETV-STR61-50-10
パルスカウント ステップモニタを使用する前に、コントローラに 低反力戦略 ライセンスをインストールする必要があります。
このモニターはパルス数を測定し、パルス数がパルスカウント下限とパルスカウント上限の間にあるかどうかを確認します。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウントステップモニターで締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメータ | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント上限は、1〜9999999の範囲である必要があります。パルスカウント下限以上である必要があります。 |
パルスカウント下限 - n- | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント下限は、1〜9999999の範囲である必要があります。パルスカウント下限以下である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
PrT - プリベリングトルク
ツール |
|---|
ES STR SL ST SR QST STB IxB |
モニターはウィンドウの長さでプリベリングトルク値を計算し、それがトルク制限内であることを確認します。角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点から始まります。計算されたプリべリングトルク値は、ウィンドウ長さ中の平均値またはピークトルク値です(ユーザーが設定したパラメータによります)。計算された値は、測定されたプリベリングトルクの結果データとして保存されます。トルク補正をオンに設定すると、測定されたプリベリングトルクが、連続ステップのすべてのトルク結果値から減算されます。以前に計算されているプリベリングトルク補正値は、トルク結果値からは減算されなくなります。トルク補正がオフに設定されている場合、連続ステップで減算は行われません。
ステップの合計角が、開始角度とウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
プリべリングトルクは、測定値の平均として、またはピークトルクで測定できます。これら 2 つのモードの間で選択するには、[値の使用] パラメータを平均トルク (平均値の場合) またはピークトルク (ピーク値の場合) に設定します。
パラメーター | 説明 |
|---|---|
トルク補正 | オンまたはオフ。 |
開始角度 | > 0 であること |
ウィンドウ長さ | >= 0 であること |
下限 | > 0 であること |
上限 | >= 0 であること |
使用する値 | 平均トルク (平均値の場合)、またはピークトルク (ピーク値の場合)。 |
PT – ピークトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB MWR-TA MWR-T |
このステップモニターは、監視中に達した、オーバーシュートを含む最大トルクを測定し、それが上限と下限の間にあることを確認します。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PTCA – ポストスレッドカット角度
ツール |
|---|
ES STR SL ST SR QST STB IxB |
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。
トリガートルクレベルは、スレッドカット角度ウィンドウの終了に達するまで無視されます。その後、測定トルクがトリガートルクを超えると同時に角度の測定が開始されます。
パラメーター | 説明 | デフォルト値 |
|---|---|---|
停止条件 | 角度測定の終了位置を指定します。
| シャットオフ |
トリガートルク | 角度の測定は、このトリガーから開始します。 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 0 |
下限 | 最小許容角度 最小限度:0 以上である必要があります 最大限度:9 999 999 未満、かつ上限未満である必要があります | 設定なし |
上限 | 最大許容角度 最小限度:0 より大きく、かつ下限値より大きい必要があります 最大限度:9 999 999 未満である必要があります | 設定なし |
スレッドカットトリガートルク | 最小限度:0 以上である必要があります 最大限度:ツール最大トルク未満である必要があります | 設定なし |
スレッドカット角度ウィンドウ | 最小限度:0 以上である必要があります 最大限度:9 999 999 未満である必要があります | 0 |
結果値
測定角度:モニターで測定された角度。
詳細については、画像をポイントしてクリックしてください。
A | シャットオフポイント | E | 角度低制限 |
B | トルクトリガー | F | 角度高制限 |
C | トルクトリガー スレッドカット | G | 測定角度 |
D | スレッドカット角度ウィンドウ |
PTCPT – ポストスレッドカットピークトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
オーバーシュートを含む、監視中に達した最大トルクを測定し、それがトルク制限内であることを確認します。すべてのトルク値は、スレッドカット角度ウィンドウの終了に達するまで無視されます。
パラメータ | 説明 |
|---|---|
スレッドカットトリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PVTH - ポストビュートルク高
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、角度ウィンドウの長さ内のすべてのトルク値が上限を下回っていることを確認します。
角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点で開始します。モニターに使用されるトルク値は、サンプル数について計算される平均トルク値に基づきます。ステップの合計角が、開始角度と角度ウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
上限 | 最高許容トルク |
PVTL – ポストビュートルク低
ツール |
|---|
ES STR SL ST SR QST STB IXB |
ポストビュートルク高のモニターと同様ですが、このモニターは角度ウィンドウの長さのすべてのトルク値が下限より大きいことを確認します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
下限 | 最低許容トルク |
SOC - シャットオフ電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
シャットオフ点は、ステップがその目標に達する点です。電流は、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
SOT – シャットオフトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
シャットオフ点は、ステップがその目標に達する点です。トルクは、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
SSD - スティックスリップ検出
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップモニターは、ステップ中のスティックスリップ効果を検出し、報告します。検出は、トルクがトリガレベルを下回った回数を数えることによって行われます。回数が 最大振動数より大きい場合、スティックスリップエラーが報告されます。モニターは、動的と固定の 2 つのモードで動作します。このモード間の違いは、トリガレベルの計算方法です。
動的トルク:トリガーレベルは、監視中に到達した電流の最大トルクのピークトルクパーセンテージとして動的に計算されます。監視は、トルクがトリガートルクを越えると同時に開始されます。
固定トルク:トリガーレベルは、ユーザーの指定する固定されたトリガートルクです。このモードでは、パーセンテージは必要ありません。
トルクがトリガートルクに達しない場合、モニターは開始されず、ステータスは NG になります。
パラメータ | 説明 |
|---|---|
タイプ | モニタの [スティックスリップ検出] で実行する [スティックスリップ検出] の種類を指定します。既定:動的トルク |
ピークトルクパーセンテージ | 既定:80%、>=10 かつ <100 であること。 |
トリガートルク | 既定:5、> = 0 かつ < ツール最大トルクであること。 |
最大振動数 | 既定:5、>=3 かつ <20 であること。 |
TAW – 角度ウィンドウのトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このモニタは、角度ウィンドウ内のすべてのトルク値がトルク制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | > 0 であること |
ウィンドウ長さ | <= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
ウィンドウを通過した場合はNG | [はい]に設定すると、角度ウィンドウの終わりに達していない場合、このモニターのステータスはNGになります。 |
TC – トルク校正
ツール |
|---|
QST |
このステップモニターは、複数トランスデューサーを備えたツールでのみ使用できます。
トルク校正モニターは、到達した最大トルクがトルク制限内であることを確認します。
パラメーター | 説明 |
|---|---|
Transducer type (トランスデューサータイプ) | トルク または トルク 2 ツールのフロントトランスデューサーの [トルク 2] に設定します。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TG - トルク勾配
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、勾配が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
エンドポイントチェック | [はい]に設定すると、ステップのシャットオフポイントで測定された勾配のみが制限内にあるかどうかがチェックされます。 |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最低許容トルク勾配。>= -100 であること。 |
上限 | 最大許容トルク勾配。> -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
角度オフセット | エンドポイントチェックがいいえに設定されている場合に使用できます。トリガートルクを初めて通過した後、勾配の計算が開始する角度を指定します。 |
Ti – 時間
ツール |
|---|
ES STR SL ST SR QST STB IXB |
監視中の経過時間を測定し、時間制限内であることを確認します。時間の測定は、モニターの開始時に開始されるか、トリガートルクが指定されている場合は、監視中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | > = 0 かつ < ツール最大トルクであること。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TRD – トルクレートと偏差
ツール |
|---|
ES STR SL ST SR QST IXB |
このステップモニターは、トルクと角度の比であるトルクレートを測定して確認します。計算されたトルクレートは、上限 と 下限 で定義されているトルクレート制限内にあることが確認されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 角度の始点のトルク。 |
開始ポイント角度 | トリガートルクで開始点の角度が測定されたら、トルクの測定が開始されます。 |
降伏ポイント角度 | トルクの測定を停止する角度点。 |
終了ポイントトルク | トルクの測定が停止されるトルク。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
限度 | > 0 であること |
YA – 降伏点からの角度
ツール |
|---|
ES STR SL ST SR QST IXB |
このモニターは、降伏点から到達したピーク角度を測定し、ピーク角度が制限内であることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
降伏点のパーセンテージ | >= 20% であること |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最小許容角度>= 0 であること |
上限 | 最大許容角度> 0 であること |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
ZC - ゼロクロス
ツール |
|---|
QST |
このモニターは、スプリング圧縮の実際の開始を計算します。
パラメーター | 説明 |
|---|---|
トリガートルク | 監視が開始する時点からのトルク値。終点ポイントトルク未満である必要があります。 |
終了ポイントトルク | 測定停止時のトルク値。トリガートルクより大きい必要があります。 |
開始ポイント角度 | 監視が開始する時点からの角度値。終了ポイントトルク未満である必要があります。 |
降伏ポイント角度 | 測定停止時の角度値。開始ポイントトルクよりも大きい必要があります。 |
トルクレート上限 | 最大トルクレート。トルクレート下限未満で、かつ 999 未満である必要があります。 |
トルクレート下限 | 最小トルクレート。999 未満で、トルクのレート上限未満である必要があります。 |
ステップ制限
締め付けステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
予期しない事態が発生した場合に確実に締め付けを停止させるために、マルチステップ締め付けプログラムに制限を追加することができます。これらの制限では、例えば、最大トルクに達していないことや、マルチステップ締め付けの一部の実行に時間がかかりすぎないことをテストできます。各ステップには独自の必須ステップ制限とオプションのステップ制限があります。必須制限は、新しいステップをマルチステッププログラムにドラッグすると設定されます。すべてのステップには、それぞれ最大 4 つの制限を設けることができます。
Power Focus 6000 と Power Focus 8の同期締め付けでは、締付プログラムで同期点を使用できます。制限に設定された条件が満たされた場合、ツールは直ちに停止し、プログラムは次の同期ポイント(Power Focus 6000、Power Focus 8、Flex でのみ有効)、またはプログラムの最後にジャンプします。同期締め付け のないコントローラーでは、ツールはただちに停止し、プログラムはプログラムの最後にジャンプします。
Flex の場合のみ:
各制限ごとに、[修復可能] = [はい]を選択すると、締め付けが停止したときに再試行できるようになります。
次の制限が、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップ制限 | 適用可能なステップ |
|---|---|
最大時間 | 外部結果とMWRを除くすべて |
最大トルク |
|
最大角度 |
|
Power Focus 6000 / Power Focus 8 | Power Focus 6000 同期締め付け / Power Focus 8 同期締め付け | Flex | IxB |
|---|---|---|---|
ST | ST | QST | IxB |
STR | STR | ||
SL | QST | ||
QST | |||
STB | |||
IxB | |||
Power Focus CONNECT | |||
XB |
A – 最大角度
ツール |
|---|
ES STR SL ST SR QST STB IXB |
角度を測定する制限です。測定した角度が最大限度に達すると、ツールは直ちに停止します。角度は制限の開始から測定されるか、指定されている場合は、制限中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 指定されている場合、これは角度が測定されるトルクです。 |
最大限度 | この限度に達すると、ツールは直ちに停止します。 |
C - 電流
ツール |
|---|
ES STR SL ST SR QST STB IXB |
このステップ制限は Power Focus XC ではサポートされていません。
この制限は、トルクがトルクトリガーを通過する実際の電流をチェックします。実際の電流が制限値を超えると、ツールは直ちに停止し、プログラムは次の同期点またはプログラムの最後にジャンプします。結果は、モニターを NG にした最初のピーク値または低い値になります。OK の場合、結果は最後に測定した電流値になります。制限中にトルクトリガーに到達しなかった場合、ステータスは OK で終了します。
パラメータ | 説明 |
|---|---|
トルクトリガ | > = 0 かつ < ツール最大トルクであること。 |
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
CTh – 食違いネジ
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限は、トルクが開始トルク (T1) を超える時点から、トルクが終了トルク (T2) を超える時点までの角度を確認します。開始トルク (T1) から測定される角度が、最大限度 (Amax) より高い場合、ツールが直ちに停止します。
トルクが終了トルク (T2) を超えると、測定された角度が最小限度 (Amin) と比較して確認されます。角度がこの制限より低い場合、ツールは直ちに停止します。
パラメータ | 説明 | 図中 |
|---|---|---|
開始トルク | <=0 であること。 | T1 |
終了トルク | <=0 であること。 | T2 |
最小限度 | 角度の下限。 | Amin |
最大限度 | 角度の上限。 | Amax |
PCH - パルスカウント高
ツール |
|---|
STR IxB |
この制限は、次のツールでのみ使用できます:
ETV-STR61-100-13
ETV-STR61-70-13
ETV-STR61-50-10
ITB-P
パルスカウント 制限を使用する前に、コントローラーに 低反力戦略 ライセンスをインストールする必要があります。
この制限により、パルスカウントが制限され、指定したパルスカウント上限を下回っていることが保証されます。
測定されたパルス数がパルスカウント上限を超える場合、ツールは直ちに停止し、プログラムは次の同期ポイントまたはプログラムの終了に進みます。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウント高ステップ制限で締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメーター | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント上限は、1〜9999999の範囲である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
Rh - リヒット
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この制限はトルクをチェックします。測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付け および Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。
マルチステップ締め付けプログラムの最初のステップにのみステップリヒット制限を追加できます。最初のステップにリヒット制限が追加されると、締め付けプログラム内の他の位置にステップを移動させることはできません。締め付けプログラムの他の位置に移動させるには、最初のステップからリヒット制限を削除する必要があります。
パラメーター | 説明 |
|---|---|
検出トルク | 測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付け および Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。ゼロより大きくなければなりません。 |
角度ウィンドウ | 角度ウィンドウは、ステップの開始から測定されます。角度ウィンドウが設定されていない場合、制限はステップ全体でアクティブになります。 |
RT - トルクの無効化中
ツール |
|---|
ES STR SL ST SR QST STB IxB |
この制限はトルクをチェックします。測定されたトルクがツール制限の条件を下回ると、ツールは直ちに停止し、プログラムは次の同期点 (Power Focus 6000 同期締め付けおよび Power Focus 8 同期締め付けの場合) またはプログラムの最後にジャンプします。
トルク制御プロセス
制限条件は、測定されたトルクです。制限が有効になるには、トルクはトルクの無効化限度の 110 % を超える必要があります。角度制御プロセス
この制限は、制限中に到達した最大トルクをチェックします。制限が有効になるには、トルクがまず、トリガートルクを超える必要があります。
パラメーター | 説明 |
|---|---|
トルク限度の解除 | 既定:10 Nm。> 0 であること。 |
パラメーター | 説明 |
|---|---|
トリガートルク | > 0 であること。 |
ピークトルクのパーセンテージ | 既定:95.>= 50 であること。 |
トルクタイムの解除 | 既定:20.>=5 かつ <=500 でなければなりません。 |
トルクの無効化角度 | > 0 であること。 |
ケーブルツールには角度に関するトルクの無効化を選択するオプションがあります。この制限は、次の2つのパラメータで制御されます:ピークトルクのパーセンテージ および トルクの無効化時間。パーセンテージは、最終ピークトルクからの下方偏移を設定し、トルク無効化時間はその偏移の期間(5~500 ms)を設定します。両方の条件(設定された期間の示されたパーセンテージ以下)が満たされる場合にのみ、プログラムが中断され、最後にジャンプします。
T - 最大トルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限はトルクをチェックします。測定したトルクが最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | トルクがこの指定された制限に達すると、ツールはすぐに停止します。 |
TAW – 角度ウィンドウのトルク
ツール |
|---|
ES STR SL ST SR QST STB IXB |
この制限は、角度ウィンドウの長さの測定されたトルクがトルク制限内であることを確認します。測定されたトルクが限度範囲外の場合、ツールは直ちに停止し、プログラムは最後にジャンプします。角度ウィンドウの長さは、トルクが初めてトリガートルクを越える時点から、開始角度で開始されます。トリガートルクが設定されていない場合、開始角度は制限の開始時に開始されます。
角度ウィンドウの長さの終了に達しない場合、制限のステータスは NG になります。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
最小限度 | >= 0 であること |
最大限度 | < = 最小値であること |
TCD - トルクと電流の偏差
ツール |
|---|
ES STR SL ST SR QST IXB |
制限は、該当するトルクに変換されたすべての電流測定が、トルクトランスデューサで測定された実際のトルクからの差が最大偏差であることを検証します。制限は、ステップ中にトルクが初めてトリガートルクに達すると開始され、ステップがその目標に達するまで有効です。
トリガートルクに達しない場合は、モニターは OK を報告します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
最大偏差 | 既定:1、> 0であること |
TG - トルク勾配
ツール |
|---|
ES STR SL ST SR QST IXB |
この制限は勾配を確認し、それが限度の範囲外の場合、ツールが直ちに停止され、プログラムはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | > 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
最小限度 | >= -100 であること。 |
最大限度 | > -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
Ti – 最大時間
ツール |
|---|
ES STR SL ST SR QST STB IXB |
時間を確認する制限です。最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | この時間が経過すると、ツールは直ちに停止します。 |
同期点
同期点では、ツールは他のすべてのツールがプログラム内の対応する同期点に到達するのを待機します。すべてのツールのステータスに応じて、プログラムは締め付けパス、修復パス、または終了パスで進行します。
同期点で待機しているツールの過熱を防ぐため、「ホールドトルク」または「ホールドポジション」は最大1秒間のみ許容されます。この後、ツールはホールドを解除し、他のツールの待機に進みます。
パラメータ | 説明 |
|---|---|
同期ホールド状態 |
|
同期点の構成
マルチステップ締め付けプログラムで、同期点をダブルクリックするか、同期点をマークしてから、ワークスペースの下部にある 構成 を選択します。複数のマークを付けるには、 CTRLキーを押します。
構成領域で、同期ポイントごとに次のいずれかの条件を選択します。
NoHold(保持なし)。モーターがオフになり、ポジションは保持されません。
HoldPosition(位置を保持)。ツールは、前のステップが終了したときの位置を保持します。
ユーティリティ
修復パスまたは終了パスを再利用するためにコネクタを追加することができます。
コネクタの作成
コネクタを選択します。
同期点を選択します。
間違った同期点を選択した場合は、マウスの右ボタンを使用するか、Escキーを押して取り消します。
修復パスまたは終了パスにあるステップを選択します。
修復パスの逆方向または終了パスの順方向のみが選択できます。
コネクタが追加されます。
1つの同期ポイントには、1つの修復パスと1つの終了パスのみを持たせることが出来ます。
例:同じ修復パス
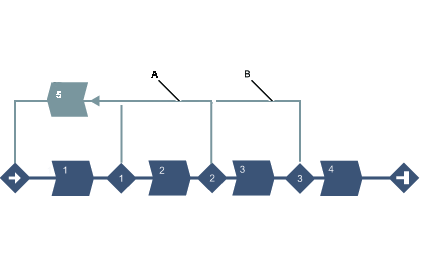
A | 2番目の同期点から、ステップ5と同じ修復パス。 |
B | 3番目の同期点から、ステップ5と同じ修復パス。 |
例:同じ終了パス
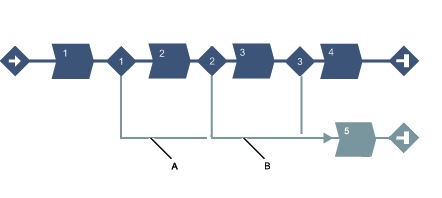
A | 最初の同期点から、ステップ5と同じ終了パス。 |
B | 2番目の同期点から、ステップ5と同じ終了パス。 |
結果レポーター
結果レポーターを使用すると、選択した生成元の特定の値を結果から抽出できるようになります。結果レポーターはステップに属しますが、値を読み取るモニター/制限に関連付けられている必要があります。結果レポーターと同じステップにあるモニターまたは制限のみを選択できます。結果レポーターはドラッグ・アンド・ドロップを使用して(モニターや制限と同じ方法で)ステップに追加します。各結果レポーターは、特定の結果値(ランダウン角度、最終トルク、プリべリングトルクなど)を報告する役割を担います。
結果レポーターは以下に関連付けることが可能です:
プログラムモニター
ステップモニター
ステップ制限
各結果レポーターは、最終的な値のタイプを定義します:
最終角度
最終トルク
プリベイリングトルク
セルフタップトルク
電流
ランダウン角度
パルス数
一般パラメーター
パラメータ | 説明 |
|---|---|
生成元 | 値を生成するモニター/制限を指定します。 |
値 | 選択した生成元で表示する値を指定します。 |
制限事項:
メインパスのステップまたはプログラムモニター/プログラム制限に属するモニター/制限にのみ、結果レポーターを追加することが可能です。
タイプが異なる場合、ステップに複数のレポーターが存在する場合があります。
たとえば、すべてのステップおよびプログラムモニター角度に、タイプ最終角度の結果レポーターが存在する場合があります。
複数の結果値を持つモニター/制限において、結果レポーターのタイプが異なる場合は、複数の結果レポーターを追加する事が可能です。
ステップ中またはプログラムモニター/制限中には、同じタイプの結果レポーターが複数存在しない場合があります。
存在する最終値タイプ当たりレポートされる結果は 1 つのみです。
ルール:
結果アイテムの内部番号は、対応する結果レポーターの内部番号と同じである必要があります。
モニタ/制限の結果の内部番号は、構成内のモニタ/制限の内部番号と同じである必要があります。
ステップの結果は、実行の順序に従って順序付けする必要があります。最初に実行されるステップは最初に配置する必要があります。
モニター/制限/ステップに存在する場合、結果レポーターによって報告され得る値:
モニター/制限の測定値(浮動小数点または整数)
モニター/制限の上限と下限
ステータス
トルクトリガーと角度トリガー
角度目標とトルク目標(ステップから読み取り)
ステータスの可能な値:
低
OK
高
その他
未設定
目標値はどのステップモニターにも属さないため、目標値はモニターが属するステップから取得されます。
マルチステップテンプレート
作成されたすべてのテンプレートは、マルチステッププログラムを作成するときに、タブテンプレートに表示されます。テンプレートは挿入 (ドラッグアンドドロップ) でき、新しいマルチステッププログラムを構築する基盤となります。
テンプレートは、ステップが追加されていないときに限り、マルチステッププログラムにドラッグできます。マルチステッププログラムにテンプレートをドラッグすると、ステップを追加できます。
マルチステップ締め付けプログラムを変更しても、テンプレートはプログラムにリンクされているのではなく、コピーされているので、テンプレート自体には影響しません。
ライブラリ> プログラムテンプレートでマルチステッププログラムテンプレートを作成します。
マルチステップ締め付けプログラムのプロパティ
パラメーター | 説明 |
|---|---|
名称 | マルチステッププログラムのユーザ定義名。 |
説明 | マルチステッププログラムの説明。 |
タイプ | 固定などの締め付けのタイプを設定します。 |
ねじ方向 | 時計回り (CW) または反時計回り (CCW) 。通常、この方向は時計回りです。 |
プログラム開始 | 間違ってプログラムが開始されるのを回避するため、トルクがこのトリガートルク値 (Nm) を初めて超えるとマルチステップ締め付けプログラムが開始されます。 |
トレース構成
トレース構成は、プログラムレベルまたは各ステップで行うことができます。デフォルトの構成はプログラムレベルで設定され、必要に応じて各ステップで上書きできます。
ここで、この機能を有効にすると、構成をプログラムレベルで実行できます。
パラメーター | 説明 |
|---|---|
有効 |
|
サンプルタイプ |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します (0.25 〜 1000 ミリ秒) |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度) |
プログラムの制限
パラメーター | 説明 |
|---|---|
最大時間限度 | 秒で設定します。この制限は、締め付けの合計時間を確認し、最大時間限度の限度を超えると、ツールは直ちに停止します。時間は、プログラムの開始から測定されます。 |
最大トルク限度 | 値を設定します。この制限は、トルクを確認し、測定されたトルクが最大トルク限度の限度を超えると、ツールは直ちに停止します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での角度制限をオンまたはオフにします。この制限は、角度が指定された角度制限内にあることを確認します。 |
ステップ単位でアクティブ | この制限が有効なステップの範囲を設定します。
|
トリガートルク | この制限が開始するトリガートルクの値を設定します。 |
上限 | 角度制限 (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での時間制限をオンまたはオフにします。この制限は、時間が指定された制限時間内にあることを確認します。 |
ステップ単位でアクティブ | この制限が有効なステップの範囲を設定します。
|
トリガートルク | この制限が開始するトリガートルクの値を設定します。 |
上限 | 時間制限 (プログラム) の上限を設定します。 |
プログラムモニター
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での角度モニタリングをオンまたはオフにします。このモニターは、角度が指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
タイプ | 角度モニタリングのタイプ:
|
トリガートルク | このモニターが開始するトリガートルクの値を設定します。 |
下限 | 角度モニタリング (プログラム) の下限を設定します。 |
上限 | 角度モニタリング (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体でのトルクモニタリングをオンまたはオフにします。このモニターは、トルクが指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
タイプ | 角度モニタリングのタイプ:
|
下限 | トルク監視 (プログラム) の下限を設定します。 |
上限 | トルク監視 (プログラム) の上限を設定します。 |
パラメーター | 説明 |
|---|---|
有効 | プログラム全体での時間モニタリングをオンまたはオフにします。このモニタリングは、時間が指定した範囲内にあるかどうかをチェックします。 |
ステップ単位でアクティブ | このモニターが有効なステップの範囲を設定します。
|
トリガートルク | このモニターが開始するトリガートルクの値を設定します。 |
下限 | 時間モニタリング (プログラム) の下限を設定します。 |
上限 | 時間モニタリング (プログラム) の上限を設定します。 |
確認
パラメーター | 説明 |
|---|---|
ツール値に対する検証 | ツールがわかっている場合にはオンを使用し、最大トルクと最高速度を設定します。 ツールがわかっていない場合にはオフを使用します。 |
ツール | 検証するツールを選択するためのドロップダウン。 |
最大トルク | 検証に使用するツールの最大トルク。 |
最大速度 | 検証に使用するツールの最大速度。 |
アッタチメントの調整
パラメーター | 説明 |
|---|---|
アタッチメント調整を使用 | 添付ファイルのチューニングをオンまたはオフにするかどうかを選択します。 |
変速比 | 変速比値は 0.5 ~ 100 の間が可能です。 |
効率の調整 | 効率の調整値は0.5~1.0の間が可能です。 |
レポーター
これにより、ユーザーは (モニター/制限から) どの値を最終値として表示するかを選択できます。[追加]をクリックして、プログラムモニター/制限値に関連付ける結果レポーターを選択します。
パラメーター | 説明 |
|---|---|
レポーター | 結果レポーターを選択します。 |
生成元 | 値を生成するモニター/制限を選択します。 |
値 | 選択した生成元で表示する値を選択します。 |
承認ステータス
ステータス | 説明 |
|---|---|
承認済み | このプログラムは承認されており、コントローラーで使用できます。プログラムは読み取り専用になります。 |
下書き | プログラムは変更中/最適化中。確定後、プログラムは承認のために送信できます。プログラムは編集可能になります。 |
すべてのプログラムは、承認ステータスに関係なく使用できます。承認ステータスは、プログラムの動作機能に影響を及ぼしません。
プログラムが承認ワークフローに入ると、ステータスが必ず設定されます。
[同期モード] タブの使用
Sync Mode  は、マルチステップ締め付けプログラムと組み合わせて使用します。締め付けを実行するには、Sync Modeを作成する必要があります。Sync Modeでは、締め付けに使用するチャンネルと、各チャンネルに使用する締め付けプログラムを指定します。最大100種類のSync Modeを作成できます。必要に応じて、チャンネルごとに異なる締付けプログラムを使用できます。Sync Mode機能を使用すると、構成ごとにモードを設定できます。
は、マルチステップ締め付けプログラムと組み合わせて使用します。締め付けを実行するには、Sync Modeを作成する必要があります。Sync Modeでは、締め付けに使用するチャンネルと、各チャンネルに使用する締め付けプログラムを指定します。最大100種類のSync Modeを作成できます。必要に応じて、チャンネルごとに異なる締付けプログラムを使用できます。Sync Mode機能を使用すると、構成ごとにモードを設定できます。
同期モードは、次の目的で使用されます:
同期締め付けまたは緩めに含まれるツールを定義する
各ツールが実行する締め付けまたは緩めプログラムを指定する
拒否管理の処理(締め付け同期モードのみに有効)
ボルト構成の構成
同期モードは、固定式ソリューションのさまざまなツールが同時にさまざまなマルチステッププログラムを実行できるようにします。
柔軟な生産ラインでは、新製品ごとに異なる同期モードを使用する必要もあります。Sync Mode機能を使用すると、構成ごとにモードを設定できます。
各行は1つの同期モードを表します。列には次の情報が含まれます。
列 | 説明 |
|---|---|
チェックボックス | 例えば、同期モードを削除するときなどに使用されます。 |
タイトル | 締め付け同期モードの場合、各名前はインデックス番号で始まり、その後にユーザー定義の名前が続きます。緩め同期モードには、ユーザー定義の名前のみが含まれます。 |
説明 | Sync Modeの説明。 |
チャンネル | Sync Modeのチャンネル数。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | 構成データを保存したユーザーを表示します。 |
コントローラ更新 | コントローラが更新された時刻。コントローラの時刻で表されます。 |
コントローラ更新者 | コントローラを最後に更新したユーザー。 |
本セクション内
Sync Modeの追加
プラント構造
でコントローラを選択します。メニューバーで同期モードアイコン
 を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。
を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 [追加]コマンドボタンを選択し、名前とインデックスを入力します(締め付け同期モードにのみ有効)。
[操作モード]ドロップダウンで[締め付け]または[緩め]を選択します。
新しい同期モードが最下位の位置に追加され、リストが更新されます。
同期モードの削除
プラント構造
でコントローラを選択します。メニューバーで同期モードアイコン
を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 削除する各同期モードに、ワークスペースエリアの左端列のチェックボックスをオンにします。
管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
選択した同期モードが削除され、リストが更新されます。
締め付け同期モード構成の処理
締め付けSync Modeをダブルクリックして、そのSync Modeを構成します。
プロパティ
パラメータ | 説明 |
|---|---|
タイトル | モードのユーザー定義名。 |
説明 | モードの説明。 |
締め付けSync Modeは緩めSync Modeにリンクすることができます。緩めSync Modeの参照は、締め付けSync Modeのプロパティメニューにあります。
[緩めSync Mode]ドロップダウンから関連する緩めSync Modeを選択します。
締め付けSync Modeのボルト構成で使用されるボルト構成の数とチャネルの数は、選択した緩めSync Modeと同じである必要があり、異なる場合は警告が表示されます。
締付不良管理(リジェクトマネジメント)
オフに切り替えたとき:
失敗した場合のアクション | 説明 |
すべて終了 |
|
続行OK |
|
オンに切り替えたとき:
パラメータ | 説明 |
|---|---|
最大失敗ステップ数 | 全体の締め付け中に失敗を許容するステップの最大数を指定します。同じステップが2回以上失敗しても、1つの失敗したステップとしてカウントされます。 |
超えた場合の対処 | 失敗したステップの最大数を超えた場合のアクションを指定します。 |
修復中に NG が発生した場合の対処 | 修復の進行中に新しいエラー(NG)が検出された場合の処置を指定します。 |
トリガ
同期点テーブルを表示するには、ボルト構成の少なくとも1つのボルトに対して同期点を使用した締め付けプログラムを選択する必要があります。
プログラムのメインパス内の同期点ごとに、不良品管理を制御するためにさまざまなトリガを指定することができます。
トリガの追加
[トリガの追加] の横にある [+] アイコンをクリックします。
トリガを選択します。
同期点ごとにアクションを設定します。
トリガの削除
[トリガの追加] の横にある [+] アイコンをクリックします。
削除するトリガの横にある削除アイコンをクリックします。
既定のトリガパラメータ | 説明 |
|---|---|
同期点 | 選択した締め付けプログラムの同期点。 |
失敗の規定値 | エラーが検出された場合の主な動作を指定します。他の条件がどれも満たされていない場合に使用されます。 |
失敗の規定値その他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
修復回数パラメータ | 説明 |
|---|---|
修復 | 同期点から開始できる修復の最大数を指定します。設定されていない場合は、無制限の回数の修復を行うことができます。 |
修復アクション | 修復の最大数が行われ、新しいエラーが発生した場合のアクションを指定します |
修復アクションその他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
NGチャンネルパラメータ | 説明 |
|---|---|
NG チャンネル | 同期点で失敗を許容する最大チャンネル数を指定します。設定されていない場合、失敗したチャンネルの数の設定は、アクションを決定するために使用されることはありません。 |
NG チャンネルアクション | 同期点でNG チャンネルを超えた数の失敗がある場合のアクションを指定します。 |
NG チャンネルその他 | このパラメータは、終了 NG または終了 NG を実行していないツールに対するアクションを定義します。 |
NGグループパラメータ | 説明 |
|---|---|
NG グループ | 同期点で失敗を許容するグループの最大数を指定します。設定されていない場合は、失敗したグループの数の設定がアクションの決定に使用されることはありません。 |
NG グループ操作 | 同期点でNGグループを超えるグループ数が失敗した場合のアクションを指定します。 |
その他の NG グループ | このパラメータは、終了 NG または終了 NG を実行していないツールに対するアクションを定義します。 |
修復不可能なパラメータ | 説明 |
|---|---|
修復不可能 | 同期点の合計状況が修復不可能である場合の処置を指定します。 |
NG修復可能その他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
ボルト構成
ボルト構成を追加するには、追加または多数を追加をクリックします。ボルト構成は最大 64 個まで設定できます。
パラメータ | 説明 |
|---|---|
チェックボックス | たとえば、チャンネルを削除するときに使用されます。 |
チャンネル | チャンネルの番号。ドライブインデックスとも呼ばれます。 |
締め付けプログラム | 締付けプログラム メニューで定義された締め付けプログラムを選択します。 |
ボルト | 締め付け時に締め付けられる実際の留め具。この番号は、フィールドバス信号ボルト締め状態など、特定のボルトのデータを収集する際のアドレスとして使用されます。 |
ボルト名(オプション) | ボルトの名前。 |
グループ | 修復グループは、修復を実行するときに互いに依存するボルトをグループ化するために使用されます。1つのチャンネルは、どれも、ゼロまたは、1つ以上の修復グループに属することができます。 |
本セクション内
不良品管理
不良品管理機能は、自動修復または失敗したステップの終了に使用されます。各同期点では、締め付けの状態が評価されます。ステータスがOKの場合、締め付けプログラムの次の部分が始まります。ステータスがNGの場合は、締め付けプログラムを修復、中止、または終了するための措置が取られます。
各同期点からの修復パスは、締め付けプログラムの修復エリアで定義されています。
各同期点からの終了パスは、締め付けプログラムの終了エリアに定義されています。
同期点の状態
すべてのツールが同期点に達すると、各ツールのステータスと全体のステータスが評価されます。
OK | NG | 修復不可能 | 致命的 | |
|---|---|---|---|---|
ツールのステータス | これまでのところすべてが OK です。 | 同期点の前のステップには、モニターによって検出されたエラーがあります。これらのエラーについては、修復が可能です。 | 同期点の前のステップに、制限によって検出されたエラーがあります。 | 同期点の前のステップに致命的なエラーがあります。その理由は次の可能性があります: |
修復グループのステータス | 修復グループ内のすべてのツールは、ステータスOKで同期点に到達しました。 | 修復グループ内の少なくとも1つのツールが、ステータスNGの同期ポイントに到達しました(ステータスが修復不可能または致命的になったものはありません)。 | 修復グループ内の少なくとも1つのツールが、ステータス[修復不可能](およびステータスが[致命的]のものが無く)同期点に到達しました。 | 修復グループ内の少なくとも 1 つのツールが、ステータス致命的で同期ポイントに到達しました。 |
合計ステータス | すべてのツールがステータスOKで同期点に到達しました。プログラムの実行は締め付けの次のステップに進みます。 | 少なくとも1つのツールが、ステータスがNGの同期ポイントに到達しました(ステータスが修復不可能または致命的になったものはありません)。 | 少なくとも1つのツールがステータス[修復不可能]で同期ポイントに到達しました(ステータスが[致命的]になったものはありません)。 | 少なくとも1つのツールが、致命的のステータスで同期ポイントに到達しました。 |
同期点の合計ステータスがNGの場合のアクションを計算する
同期点での合計ステータスがNGの場合に適用可能な処置が計算されます。アクションは、設定されたトリガによって決まります。実行される最初のトリガは、実行するアクションを決定します:
失敗したステップの最大数を超えました:
締め付け全体における失敗したステップの合計数が失敗したステップの最大数を超えると、[超過時のアクション]が使用されます。同じステップが複数回失敗した場合、1 つの失敗したステップとしてカウントされます。修復の最大数を超えました:
現在の同期点から開始された修復の合計数が修復数トリガの修復数を超えると、修復アクションが使用されます。失敗したグループの最大数:
失敗したグループ(ステータスがNGグループ)の数がNG チャンネル数のNGグループの数を超えると、NGグループアクションが使用されます。失敗したツールの最大数:
失敗したツール(ステータスがNGのツール)の数が、NGグループの数のNGチャンネル数を超えると、NGチャンネルアクションが使用されます。デフォルト失敗アクション:
上記のいずれの条件も満たされない場合は、デフォルト失敗アクションの設定が使用されます。
修復を実行するアクション
修復を実行するツールは、修復パス内のステップを実行して前の同期点に戻ります。修復は、修復を開始した同期ポイントにプログラムが戻るまで継続されます。修復が完了すると、ツール、修復グループ、および合計ステータスが再び評価されます。合計ステータスがOKになった場合、すべてのツールは次の手順に進みます。それ以外の場合は、新しい修復または中止が開始されます。
修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。
ステータスに対するアクション | 合計ステータス NG |
|---|---|
修復 NG | ステータス NG のすべてのツールが修復を実行します。修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。 |
NG グループの修復 | ステータスがNGの修復グループに属するすべてのツールは修復を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく修復を実行します。修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。 |
すべて修復 | すべてのツールは、ステータスに関係なく、修復を実行します。 |
中止を実行するアクション
中止を実行するツールは、その中止パスでステップを実行します。その後、締付けはステータスNGで完了します。
ステータスに対するアクション | 合計ステータス NG | 合計ステータス修復不可 |
|---|---|---|
NG を終了 | ステータスがNGのツールはすべて中止を実行します。 | ステータスがNGまたは修復不可のツールはすべて終了します。 |
NG グループの中止 | ステータスがNGの修復グループに属するすべてのツールは中止を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく中止を実行します。 | ステータスがNGまたは修復不可の修復グループに属するすべてのツールは中止を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく中止を実行します。 |
全てを中止 | すべてのツールは、そのステータスに関係なく、中止を実行します。 | |
ステータスがOKのツールは、その他の設定に従って続行されます。
- 続行、他のツールは、中止が完了するまで現在の同期ポイントで待機します。その後、締め付けプログラムの残りの部分を続行します。
- すべて終了、他のツールは締め付けを終了します。
締め付けプログラムを終了するアクション
締め付けプログラムを終了するツールは、他の手順を実行せずに直接最後に移動します。その後、締付けはステータスNGで完了します。
ステータスに対するアクション | 合計ステータス NG | 合計ステータス修復不可 |
|---|---|---|
NG を終了 | ステータスが NG のすべてのツールは、中止パスを実行せずに締め付けを終了します。 | ステータスが NG または修復不可能のすべてのツールは、終了パスを実行せずに締め付けを終了します。 |
NG グループを終了 | ステータスが NG の修復グループに属するすべてのツールは、中止パスを実行せずに締め付けを終了します。修復グループのすべてのツールは、個々のステータスに関係なく締め付けを終了します。 | ステータスがNGまたは修復不可の修復グループに属するすべてのツールは、中止パスを実行せずに締め付けを終了します。修復グループのすべてのツールは、個々のステータスに関係なく締め付けを終了します。 |
すべて終了 | すべてのツールは、ステータスに関係なく、中止パスを実行せずに締め付けを終了します。 | |
ステータスがOKのツールは、その他の設定に従って続行されます。
- 続行: その他のツールは締め付けプログラムの残りの部分で続行します。
- 全てを中止: その他のツールは中止を実行します。
全ステータスが致命的である場合のアクション
合計ステータスが致命的である場合、修復は許可されません。ステータスが致命的であるツールはこれ以上実行できないため、締付けが終了します。他のツールは、個々のステータスに関係なく終了します。
ボルトの1つがNGであるが、締め付けプログラムで修復アクションが構成されていない場合、モードはすべて終了します。NG ではそのボルトのNGの主な原因が表示されます。
ボルトの1つがNGで、修復パスがある場合、システムはNGボルトで最大制限時間に達するまで修復を試みます。OK である他のボルトは、待機します。n 回の修復後にボルトが OK になった場合、プログラムは上記の箇条書きの最初の通り、すべてのボルトで続行されます。それでもボルトがOKにならない場合は、箇条書き2つ目の通り、同期モード全体が終了します。
緩め同期モード構成の処理
緩め同期モードをダブルクリックして、その同期モードを構成します。
パラメータ | 説明 |
|---|---|
名前 | モードのユーザー定義名。 |
説明 | モードの説明。 |
ボルト構成
緩め同期モードのボルト構成は、緩めマルチステッププログラムにのみリンク可能で、使用可能な緩めマルチステッププログラムのみをリストします。
ボルト構成を追加するには、追加または多数を追加をクリックします。ボルト構成は最大 64 個まで設定できます。
パラメータ | 説明 |
|---|---|
チェックボックス | たとえば、チャンネルを削除するときに使用されます。 |
チャンネル | チャンネルの番号。ドライブインデックスとも呼ばれます。 |
緩めプログラム | 締め付けプログラム メニューで定義された緩めマルチステッププログラムを選択します。 |
緩め同期モードの実行
緩め同期モードは、次の方法で実行できます。
上記のすべてのケースで正しく機能するためには、締め付けを開始するためのすべての条件が満たされている必要があります(例:非常停止なし、信号の有効化が設定されているなど)。
緩め選択入力を使用した緩め同期モードの実行
関連する緩め同期モードのある締め付け同期モードを選択します。
これは、フィールドバスと SoftPLC
にある [フィールドバス] サブタブの [送信先コントローラー] 領域の I/O 信号の選択入力に ID 10020 を追加することによって行うことができます。または、[仮想ステーション] タブの [タスク] でタスクを選択することによっても実行できます。
フィールドバスと SoftPLC
にある[フィールドバス]サブタブの[送信先コントローラー]領域でI/O信号 緩め選択、ID 10029 を選択します。次の2つの信号のいずれかを使用して緩めを開始します。
駆動開始(連続)、ID 10028
駆動開始(パルス)、ID 10113
緩め開始入力を使用した緩め同期モードの実行
締付け同期モードと関連する緩め同期モードを選択します。
これは、フィールドバスと SoftPLC
にある [フィールドバス] サブタブの [送信先コントローラー] 領域の I/O 信号の選択入力に ID 10020 を追加することによって行うことができます。または、[仮想ステーション] タブの [タスク] でタスクを選択することによっても実行できます。
次の2つの信号のいずれかを使用して緩めを開始します。
緩め開始 (連続)、ID 10011
緩めパルス開始 (パルス)、ID 10072
バッチシーケンス、同期モード、ソースのコピーと貼り付け
次をコピーして貼り付けることができます:
バッチシーケンス
同期モード
ソースバッチとソース締め付け
固定アプリケーションと同期アプリケーションには次のルールが適用されます:
同じコントローラーで実行できます
同じソフトウェアバージョンを実行する同じタイプのコントローラー間で行うことができます。
バッチ、シーケンスまたはソースをコピーしたものには、付属する、または関連するプログラム、モード、リンクなど、すべてのものが常に含まれます。
例:ソースバッチをコピーしたもの > 貼り付けると、新しいバッチシーケンス、およびプログラムがリンクされた新いソースバッチが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
[バッチシーケンス]、[同期モード]、または [ソース] を選択します。
作業スペース領域には利用可能なプログラムがすべて表示されます。

1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
同期モードのエクスポート
同期モードは、1つのコントローラからエクスポートし、別のコントローラにインポートできます。
エクスポートとインポートは、同じコントローラーで実行される場合、または同じソフトウェアバージョンとコントローラータイプを実行している異なるコントローラー間で実行される場合にのみ可能です。
プラント構造
で、リストからコントローラを選択します。メニューバーで、同期モード
タブを選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。エクスポートする同期モードのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<SyncModeName>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
保存 を選択します。
同期モードのインポート
同期モードは、1つのコントローラーからエクスポートし、別のコントローラーにインポートできます。
エクスポートとインポートは、同じコントローラーで実行される場合、または同じソフトウェアバージョンとコントローラータイプを実行している異なるコントローラー間で実行される場合にのみ可能です。
プラント構造
で、リストからコントローラを選択します。メニューバーで、同期モード
タブを選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
同期モードをインポートすると、接続されたマルチステップ締め付けプログラムも含まれます。すでに最大数に達しているため、マルチステップ締め付けプログラムをインポートするスペースがない場合、貼り付け操作全体が失敗します。
[バッチシーケンス]タブの使用
バッチシーケンスタスクは、仮想ステーションのタスク構成または外部入力ソースで選択されます。
締め付け順序は、固定スキームに従うか、オペレーターに任せて自由順序スキームかのいずれかを決定することができます。いずれの場合も、ソケットまたは信号を使用して、コントローラとオペレータの間の通信を行うことができます。
バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
バッチシーケンスは、操作にバッチ/締め付けプログラムの組み合わせが必要な場合の、順序の指定されたバッチのセットです。
プラント構造
でコントローラを選択します。 バッチシーケンス
に移動します。
列には次の情報が含まれます。
列 | 説明 |
|---|---|
タイトル | 各バッチシーケンス名は、インデックス番号で始まります。それに続く文字は、任意のユーザー定義名に変更することが可能です。 |
説明 | バッチシーケンスの説明。 |
最終変更 | ToolsTalk 2 時間で表されます。 |
最終変更者 | <ユーザー> によって最後に変更された構成データ。 |
コントローラ更新 | コントローラ時間で表します。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ。 |
変更者とコントローラー更新者のフィールドは、ToolsTalk 2インターフェースで作成された登録ToolsTalk 2 ユーザーになります。
コマンド | 説明 |
|---|---|
管理 |
構成を削除すると、構成のリストのインデックス番号に異常が示されます。インデックス番号は変更されません。新しい構成を追加すると、構成に空いているインデックスの最下位が検索されます。 |
追加 | 新しいバッチシーケンスを作成またはインポートします。 |
バッチシーケンス名は、インデックス番号とオプションの文字の組み合わせです。インデックスの位置は変更できません。新しい構成には、一番小さい使用可能なインデックス番号が指定されます。インデックス番号は、タスクの選択プロセスの一部にソース番号と ID 番号を使用する際に重要です。
本セクション内
バッチシーケンスの構成ワークスペース
バッチシーケンスの構成ワークスペースには、次の構成メニューで単一のバッチシーケンスの詳細が示されます。
基本設定: 構成名と説明を使用。
一般設定: 締め付けの流れと順番を制御。
シーケンス構成: 個別の締め付けプログラムからバッチシーケンスを作成。
バッチシーケンスメニューの表示
プラント構造ワークスペース
でコントローラを選択します。メニューバーでバッチシーケンス
を選びます。メニューを表示するバッチシーケンスの名前をダブルクリックします。
バッチシーケンスの構成メニュー
プロパティメニューのオプションは次の通りです:
パラメーター名 | 説明 |
|---|---|
名称 | 既定名バッチシーケンス。これは編集可能です。 |
説明 | バッチシーケンスに対して発行される説明(オプション)。 |
バッチシーケンス完了時にツールをロック | バッチシーケンスカウンタがバッチシーケンスのサイズに等しくなると、バッチシーケンスは完了します。 オン: このツールはロックされており、締め付けを続けるには、締め付けプログラムまたはバッチシーケンスを選択する必要があります。 オフ: 完了すると、バッチシーケンスを繰り返す準備が整います。 |
自由な順序 | いいえ:シーケンス内のバッチは、インデックス番号順に実行されます。ソケットが指定されている場合、バッチが完了する際に、次のソケットに対してシステムからプロンプトが表示されます。 はい:シーケンス内の締め付けとバッチは、任意の順序で実行できます。オペレーターは、ID 番号として機能するソケットセレクタビットを使用してどのバッチを実行するかをシステムに示す必要があります。 |
NOK で増加 | いいえ: 締め付けが失敗 (NG) するとバッチカウンタは増加しません。 はい: 締め付けが失敗 (NG) するとバッチカウンタが増加します。 |
最大連続 NOK | 最大連続 NG は、バッチ内での連続失敗締め付けの最大許容回数として定義されます。値に達すると、イベントのNG締め付けが多すぎます(4020)が表示されます。 |
緩め時の減少 | 決して: 緩めが完了したときにバッチカウンタは減少しません。これは初期設定(デフォルト)値です。 常に: 緩めが完了したときにバッチカウンタが減少します。 前回の締め付けが OK だった場合: 前回の締め付けが OK であった場合、緩めが完了したときに、バッチカウンタは減少します。 |
シーケンス中止時間 | オン: 選択したバッチシーケンスは、指定した制限時間内に中止されますオンを選択した場合、Abort time (異常終了時間) のフィールドが開きます。 オフ: 選択したバッチシーケンスを中止することは、できません。 |
Abort time (異常終了時間) | 選択したバッチシーケンスを中止することができる秒数。許可されている範囲は 1 秒 ~ 1600 秒です。 |
バッチシーケンスが完了し、次のいずれかの場合にツールがロックされることがあります:
すべての締め付けが OK または NG の結果で完了しました。
シーケンスの中止信号でタスクが終了しました。実行されていない締め付けは NG 結果で報告されます。
シーケンス構成メニューでは、異なるバッチが 1 つのバッチシーケンスに組み合わされます。バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
シーケンス構成メニューの各行は単一のバッチを表します。
列 | 説明 |
|---|---|
チェックボックス。 | |
バッチ | バッチのインデックス番号 (シーケンス内の順番)。 |
同期モード | ドロップダウン・メニュー。このバッチの同期モードを選択します。 |
Batch size(バッチサイズ) | バッチに含められる締め付け数。 |
ID 番号 | 外部で生成された ID 番号、または ID 番号に変換されるソケットセレクタ位置。
|
関連情報
バッチシーケンスへの新規バッチの追加
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースには、バッチシーケンスのリストが表示されます。シーケンス構成メニューで追加コマンドボタンを選択します。バッチシーケンスの作成方法ウィンドウが開きます。
名前を付けてバッチシーケンスを発行し、[追加]を選択します。
プロパティで関連するパラメーターを選択します。
シーケンス構成でバッチの同期モードを選択します。
バッチサイズ(バッチに含まれる締め付けの数)を入力します。
オプションの ID 番号を入力します。
新しいバッチシーケンスは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して、バッチ締め付け順序を変更することはできません。
バッチシーケンス、同期モード、ソースのコピーと貼り付け
次をコピーして貼り付けることができます:
バッチシーケンス
同期モード
ソースバッチとソース締め付け
固定アプリケーションと同期アプリケーションには次のルールが適用されます:
同じコントローラーで実行できます
同じソフトウェアバージョンを実行する同じタイプのコントローラー間で行うことができます。
バッチ、シーケンスまたはソースをコピーしたものには、付属する、または関連するプログラム、モード、リンクなど、すべてのものが常に含まれます。
例:ソースバッチをコピーしたもの > 貼り付けると、新しいバッチシーケンス、およびプログラムがリンクされた新いソースバッチが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
[バッチシーケンス]、[同期モード]、または [ソース] を選択します。
作業スペース領域には利用可能なプログラムがすべて表示されます。
1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
バッチシーケンスのエクスポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをエクスポートすると、バッチシーケンスに関連付けられているプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]タブ
を選択します。ワークスペースには、現在のすべてのバッチシーケンスのリストが表示されます。エクスポートするバッチシーケンスのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<BatchSequenceName>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
バッチシーケンスのインポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをインポートすると、バッチシーケンスに関連付けられているプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースエリアは、現在のすべてのバッチシーケンスが記載されているリストを表示します。 追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
使用可能なスロットがない場合、バッチシーケンスがリストの一番下に追加され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して順序を変更することはできません。
バッチシーケンスのバッチの削除
バッチシーケンス
で、削除するバッチのチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。選択したバッチがリストから削除されます。
バッチがバッチシーケンスから削除されると、インデックスシーケンスは圧縮されて更新され、ギャップは残りません。削除されたバッチシーケンスのインデックス番号は、作成される次のシーケンスに自動的に割り当てられます。
[ソース]タブの使用
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
タスクの選択は、仮想ステーション構成ワークスペースのタスクメニューで行われます。
締め付けのためのタスクとして使用される外部信号は、ソースタブで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは同様の物です。2 つのタイプのソースタスクがあります。
ソース締め付けタスク
ソースバッチタスク
ソース締め付けは、単一の同期モードを選択するのに使用します。
ソースバッチは、一連の同期モードであるバッチシーケンスを選択するのに使用します。
本セクション内
ソース締め付けの概要
締め付けメニューには、ソースバッチとソース締め付け構成のリストが表示されます。別のリストを仮想ステーションにリンクするには、目的の[仮想ステーション]に移動して、[タスクプロパティ] で [選択] を選択します。ここで、ソースを作業として選択することができます。ソース締め付けでは、特定の締め付けプログラムを指定子番号にリンクします。識別子番号がコントローラに送信されると、リンクされたプログラムは別の信号が送信されるまで何度も実行されます。
パラメーター名 | 説明 |
|---|---|
名前 | ソース締め付けに発行された名前。 |
説明 | ソース締め付けの説明。 |
バッチシーケンス完了時にツールをロック | オン: バッチシーケンスが完了するとツールがロックされます。 オフ: バッチシーケンスが完了してもツールはロック解除のままです。 |
NG で増加 | オン: NG 締め付けが行われていても、バッチが前進します。 オフ:締め付けが成功した場合にのみ、バッチが前進します。 |
プログラムごとの最大連続NG |
|
最大連続 NG | 許可される連続NG 結果数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、ソース締め付けは停止します。 |
バッチコントロール | ソース締め付けの実行方法を選択します。
|
コマンド | 説明 |
|---|---|
追加 | 使用可能で一番小さい識別子で新しい行を追加します。 |
削除 | 選択した同期モードをリストから削除します。対応するチェックボックスを選択して、同期モードを選択します。 |
ソース締め付けの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [締付け] を選択し、追加を選択します。
ソース締め付けに名前を付けます。
許可される連続NG 結果最大数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、ソース締め付けは停止します。
ドロップダウンメニューから、使用するバッチコントロールを選択します。
内部バッチコントロール:ソース締め付けの繰り返し回数を構成します。
外部バッチコントロール:オープンプロトコルまたはフィールドバスを使用して行われる、ソース締め付けの実行回数を構成します。構成を変更すると、ソース締め付けをクリアし、クリーンな既知の状態から開始されます(バッチ内のバッチカウントは 0 にリセットされます)。変更が有効になる前に、進行中の締め付けを終了させることができます。
既定では、新しいソース締め付けを作成する際に、編集可能な識別子番号は一つしか利用できません。さらに追加するには 追加を選択します。
すべての項目に識別子番号を付けます
モードを選択して、リストから選択することで、各識別子番号にリンクするモードを選択します。
ソースバッチの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [バッチ] を選択し、追加を選択します。
ソースバッチに名前を付けます
新規識別子文字列のスキャンで前のスキャンを中止しなければならない場合は、新規識別子を中止をはいに設定します。
識別子の方法(テキストの文字列、または数値文字列の数)を選択します
文字列が任意の順序でスキャンできる場合には、自由な順序をオンに設定します。
識別子文字列は、最大 4 つの異なる文字列で構成することができます。自由な順序をいいえに設定すると、文字列がシステムに認識されるには、文字列が特定の順序でスキャンされる必要があります。
自由な順序をオンに設定して、文字列間で長さが重複するとエラーが発生する場合があります。この場合、締め付けプログラムにスキャンされる順序はアクティブになりません。このエラーを解決するには、自由な順序をオフに設定するか、文字列の長さを調整します。
文字列に名前を付け、文字列の長さを入力します。(文字列の連結の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
有効位置 - 文字列の関連位置。(有効位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
保存位置 - システムで記録される位置。(保存位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
どの文字列(文字列の内容列)がどのバッチシーケンス(アクティブ化列)にリンクされなければならないかを示します。追加を選択して、さらに文字列を追加します。
「文字列の内容」の入力には、ワイルドカードが使用できます。ワイルドカードは文字列の任意の位置で使用できます。あいまいな一致結果には、バッチシーケンスはアクティブになりません。
ワイルドカードは「.」(ピリオド)です。
新規識別子を中止では、バッチシーケンスが有効で進行中に、2 番目の信号が解釈される方法を制御します。
バッチシーケンス で ID 番号が使用されている場合、入力信号またはソケットセレクタを使用して、バッチシーケンスでバッチを選択できます。
コントローラーは、識別子番号または識別子文字列のいずれかに基づいて、入力信号でバッチシーケンスを選択するように構成できます。
有効位置
有効位置を用いて、事前に定義した文字列と一致するよう文字列を組み合わせた際にバーコードの文字列でどの文字を読み込むかを指定します。有効位置の数は、事前に定義した文字列の文字数と一致する必要があります。
バーコード文字列を読み込む有効位置の構成
バーコード文字列の位置は、1~1024 の間の数に関連します。文字列の最初の位置は 1 であり、最後は 1024 です。
説明 | 有効位置 | 有効な構成 | 事前に定義した文字列と一致するバーコードの文字列 |
|---|---|---|---|
重要な位置の順序 | 1,2,3,7,8 | Ok | ABCGH |
重要な位置の任意の順序 | 7,1,2,3,8 | Ok | GABCH |
番号の範囲 | 1–3,7-8 | Ok | ABCGH |
識別子文字列の組み合わせ
マッチングで使用する識別子文字列は、工場管理システムから最大 4 文字列、または 1 つの文字列に組み合わせる必要がある最大 4 スキャナ入力の組み合わせです。
追加および削除コマンドボタンは、組み合わせる文字列の数を管理します。次のパラメーターが使用できます。
パラメータ | 説明 |
|---|---|
チェックボックス | 削除される場合にエントリを選択します。 |
名前 | 文字列には名前が与えられなければなりません。 |
長さ | 文字列の長さはわかっていなければならず、入力する必要があります。これは、正しい文字列識別子を組み合わせることができる上で重要です。 |
有効位置 | 照合で使用される合成文字列の(ハイフンで区切られた)カンマ区切り位置または範囲。 |
保存位置 | 結果に保存される文字列のカンマで区切られた位置または範囲。 |
複数の識別子文字列を使用する場合、次の段階を実施します。
新しいエントリをテーブルに作成するには、追加コマンドボタンを押します。
文字列に名前を発行します。
文字列の長さを入力します。
追加する文字列全てに段階 1 ~ 3 を繰り返します。最大 4 つの文字列を組み合わせることができます。
各行のスタートエンドパラメーターは、マッチングプロセスの次の段階で使用する組み合わせ文字列識別子のここの文字列位置を定義します。
入力として識別子文字列を使用するタスク選択プロセスの最初の部分は、アクティブにする文字列内の位置を定義します。
識別子文字列のどの位置をマッチングで使用するかを定義するには、有意な位置を入力します。これらの位置は、カンマで区切られているか、範囲で指定されるかのいずれかである必要があります。
保存位置
保存位置は、ソースバッチで使用される各文字列のどの部分が保存され、ログでどのように表示されるかをユーザーが指示できるフィールドです。このフィールドで、保存する必要のある文字列の位置を示します。位置は、完全な文字列の部分のみで構成できます。フィールドが空のままの場合、全(連結)文字列が保存されます。以下の表は、保存された位置の組み合わせのいくつかの例を示します。
保存位置の値はカンマ区切り(スペースなし)であり、範囲はハイフンを使用して示されます。
識別子文字列 | 位置 |
|---|---|
文字列 1:1234567 | 1-7 |
文字列 2:abcdef | 8-13 |
文字列 3:GHIJKL | 14-19 |
文字列 4:890 | 20-22 |
保存位置 | 保存された結果 |
|---|---|
(空き) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 は 1-12,19-21 に自動的に変更1-12,19-21 | 1234567abcdeL89 |
バッチシーケンス、同期モード、ソースのコピーと貼り付け
次をコピーして貼り付けることができます:
バッチシーケンス
同期モード
ソースバッチとソース締め付け
固定アプリケーションと同期アプリケーションには次のルールが適用されます:
同じコントローラーで実行できます
同じソフトウェアバージョンを実行する同じタイプのコントローラー間で行うことができます。
バッチ、シーケンスまたはソースをコピーしたものには、付属する、または関連するプログラム、モード、リンクなど、すべてのものが常に含まれます。
例:ソースバッチをコピーしたもの > 貼り付けると、新しいバッチシーケンス、およびプログラムがリンクされた新いソースバッチが作成されます。
コピーと貼り付け
プラント構造でコントローラーを選択します。
[バッチシーケンス]、[同期モード]、または [ソース] を選択します。
作業スペース領域には利用可能なプログラムがすべて表示されます。
1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーを同じコントローラーに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
コピーを別のコントローラーに貼り付けるには、プラント構造内のコントローラーを選択し、続いて適切な作業スペースを選択します。作業スペースを右クリックして、[貼り付け] を選択します。
コピーをプログラムテンプレート ライブラリワークスペースに貼り付けることも可能です。
貼り付けたコピーをダブルクリックして開き、変更します。
ソースバッチまたはソースの締め付けのエクスポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをエクスポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。エクスポートするソースバッチまたは締め付けのチェックボックスをオンにします。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<SourceBatch>.json または <SourceTightening>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
ソースバッチまたはソースの締め付けのインポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをインポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースエリアには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
新しいソースバッチまたはソースの締め付けは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更することはできません。
[構成]タブの操作
スキャナ、スタックライト、ツールは、I/O バスを介してコントローラに接続されるデバイスタイプの一例です。複数のデバイスを I/O バスに接続し、各デバイスタイプに独自の構成パラメータを持たせることができます。操作の前に、構成を仮想ステーションに割り当てることが必要です。
既存の構成の表示
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
を選択します。ワークスペースエリアが、現在のすべての構成のリストを表示します。
ワークスペースリストの行をダブルクリックして、選択した構成の詳細を表示します。
ワークスペースエリアに、選択したデバイスを構成できる構成メニューが表示されます。
構成概要リスト 列
説明
チェックボックス
選択して、管理コマンドボタンリストにアクセスします。
説明
構成の説明
タイトル
コントローラテンプレートの名前を示します。
タイプ
構成セットアップのタイプ。
ライブラリのリンク
構成のライブラリリンクがある場合は、はい と表示されます。
最終変更
ToolsTalk 2 時間で表される最終変更。
変更者
<User> による最終変更
コントローラ更新
コントローラ時間で表される最終変更。
コントローラ更新者
<User> によるコントローラの最終更新
各列の見出しをクリックして、リストを並べ替えることができます。
構成の追加
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。ドロップダウンリストからデバイスのタイプを選択し、[追加]を選択します
プロパティメニューで、構成の名前と説明を入力します。
選択したデバイスの種類に応じて、各構成には独自の入力信号と出力信号のセットがあります。デバイスの各タイプの構成方法は、別途説明しています。
構成のインポート
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ダイアログウィンドウで追加を選択します。
構成の削除
構成
で、削除する構成のチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
選択された構成がリストから削除されます。
構成は、仮想ステーションに割り当てられていない場合にのみ削除できます。
構成タイプ
内部入出力
コントローラーには 2 つのねじ込み端子が内側にあります。それらはデジタル入出力信号を接続する際に使用されます。
参照セクションに示されているすべてのデジタル入力信号とデジタル出力信号は、内部 I/O 端子に配線できます。
電気仕様および接続についてはコントローラマニュアルを参照してください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
入出力拡張器
I/O 拡張器は I/O バスに接続され、デジタル入出力信号を接続するための拡張機能を提供します。複数の拡張期を接続できます。接続のアドレス構成および仕様については I/O 拡張器のマニュアルをお読みください。
次のデバイスタイプを選択できます:
I/O ハブ:8 チャンネル
入出力拡張器: 16 チャンネル
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
オペレータパネル
オペレーターパネルは I/O バスに接続され、オペレーターとコントローラの間に環境設定可能なデジタル通信リンクを提供します。ランプ、ボタン、ブザーおよびスイッチが通信に使用されます。接続のアドレス構成および仕様についてはオペレーターパネルのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションに記載されています。
スタックライト
スタックライトはコントローラからオペレーターへの長距離視覚通信を提供します。ライトに加えて、アクセサリにはボタン、キースイッチ、ブザー、I/O接続を装備することができます。
スタックライトは I/O バスを使用してコントローラに接続されます。複数のアクセサリーが I/O バスに接続可能です。接続のアドレス構成および仕様についてはスタックライトのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション アイコン を参照してください。
Indicatorbox
インジケータボックスは、コントローラからのステータス信号を表示するために使用される柔軟性に富む表示インジケータです。ディスプレイには20個のデュアルカラーLEDが装備されています。これらは各面に5個のLEDのある正方形にマウントされています。
本セクション内
インジケータボックスの構成
LED 構成の追加
構成
メニューの インジケータ ボックスを選択します。 LEDを追加するには、追加 ボタンをクリックします。
図に従って、位置ボックスで LED 文字を選択します。
赤と緑のLEDの信号を選択します。
LEDを削除するには、LEDを選択して削除ボタンをクリックします。
ツール構成
ツール構成を使用すると、ツールに関連するさまざまな機能をアクティブ化して構成することができます。各ツール構成は、ハードウェアレイアウト構成のツールにマッピングできます。
ツール構成メニューを表示または編集するには:
プラント構造ワークスペース
でコントローラを選択します。 メニューバーで構成
をクリックします。ワークスペースエリアに現在のアクセサリー構成が表示されます。
新しい構成を追加するか、タイプがツール構成の既存の構成をダブルクリックします。
必要な構成を作成します。パラメータについては、各セクションに説明されています。
ツール構成は次のメニューに分かれています:
メニュー | 説明 |
|---|---|
プロパティ | 構成の名前と説明と、ツールタイプフィルタ。 |
一般 | ツールの一般パラメータ。 |
複数トランスデューサー (FlexSystem でのみ使用可能) | 複数トランスデューサー機能。 |
ツール LED (同期締め付けでのみ使用可能) | ツール構成 - ツールLEDを参照してください。 |
ブザー (同期締め付けでのみ使用可能) | ツール構成 - ブザーを参照してください。 |
プロパティ
ツール構成には固有の名前を指定してください。オプションの説明フィールドも使用できます。
アクセサリー構成リストは、すべての構成をアルファベット順に表示します。
ツール構成メニューを表示または編集するには:
プラント構造ワークスペース
でコントローラを選択します。メニューバーにある構成アイコン
を選択します。ワークスペースエリアに、現在のすべてのアクセサリー構成のリストが表示されます。
選択したツール構成の名前をダブルクリックします。
ワークスペースエリアは現在の構成の詳細を表示し、各トピックに 1 つのメニューに分割されています。
構成名と説明をプロパティメニューに入力します。
ツールタイプでフィルタドロップダウンメニューからツールタイプを選択します。
ツールの数が増えると、メニューの数も増えます。ワークスペースを見やすくするため、メニューを絞り込んで、選択されたツールタイプに関係するメニューのみを表示できます。フィルタはプロパティメニューで設定します。ツールなしを選択すると、すべての使用可能なツール構成パラメータが表示されます。
一般
ソース開始を使ってツール開始方法を設定します。
ソースを開始 | 説明 |
|---|---|
トリガーのみ | 締め付けを開始するには、ツールのトリガーを押します。 |
トリガまたはプッシュ | ツールトリガを押すかツールをジョイントに押して付けて、締め付けを開始します。 |
トリガとプッシュ | ツールトリガを押してツールをジョイントに押して付けて、締め付けを開始します。 |
プッシュのみ | ツールをジョイントに押して付けて、締め付けを開始します。 |
デジタル入力 | 外部デジタル入力信号を使用して、締め付け開始をトリガします。 |
安全トリガー | 安全トリガー (メイントリガーと追加トリガーの両方) を押して、締め付けを開始します。 |
複数のトランスデューサー
QST および IxB ツールでのみ有効です。
ツールの種類とトランスデューサーの数に応じて、締め付け時にトルクトランスデューサーと角度トランスデューサーをどのように使用するかを設定できます。トランスデューサーは、制御用または監視用に構成できます。
パラメーター | 説明 |
|---|---|
トルク トランスデューサーの制御 | 締め付けに使用するようにトルクトランスデューサーを設定します。 使用可能な設定:
|
制御角度トランスデューサー | 締め付けに使用される角度トランスデューサーを設定します。 使用可能な設定:
|
詳細を選択すると、詳細設定を含むサブメニューが開きます。
パラメーター | 説明 |
|---|---|
監視トルク値を報告する | 設定すると、制御トランスデューサーと監視トランスデューサーの両方から最終トルク値が報告され、両方のステータス (OK/高/低) の評価も含まれます。 |
冗長エラー報告トルク | 制御トランスデューサーで測定された最終トルクが監視トランスデューサーで測定された値と異なる場合、冗長エラーが報告されます。 |
冗長エラー発生時にツールをロックする | 冗長エラーが検出された場合は、ツールをロックしてください。 |
パラメーター | 説明 |
|---|---|
デュアルトルクが必要 | 設定されている場合、接続されたツールが締め付けを実行できるようにするには、デュアルトルクトランスデューサー (無効になっていない) が必要です。 |
トレース内のトルク監視 | 設定されている場合、監視トルクトランスデューサーからの値がトレースに含まれます。 |
パラメーター | 説明 |
|---|---|
ダブルトルク制限の有効化 | 設定すると、ダブルトルクトランスデューサーの制限が有効になります。 |
最大トルク差 | 二重トルク差制限の限界 |
パラメーター | 説明 |
|---|---|
監視角度値を報告する | 設定すると、制御トランスデューサーと監視トランスデューサーの両方から最終角度値が報告され、両方のステータス (OK/高/低) の評価も含まれます。 |
冗長エラー報告角度 | 制御トランスデューサーで測定された最終角度が監視トランスデューサーで測定された値と異なる場合、冗長エラーが報告されます。 |
冗長エラー発生時にツールをロックする | 冗長エラーが検出された場合は、ツールをロックしてください。 |
パラメーター | 説明 |
|---|---|
デュアル角度が必要 | 設定されている場合、接続されたツールが締め付けを実行できるようにするには、デュアル角度トランスデューサー (無効になっていない) が必要です。 |
トレース内の監視角度 | 設定されている場合、監視角度トランスデューサーからの値がトレースに含まれます。 |
パラメーター | 説明 |
|---|---|
ダブル角度制限の有効化 | 設定すると、ダブル角度トランスデューサーの制限が有効になります。 |
最大角度差 | ダブル角度差制限の限界。 |
スキャナ
スキャナーはアクセサリです。USBケーブルを介してコントローラーに直接取り付けられています。
スキャナ構成では、OnかOffとしてパスを構成することが可能です。デフォルト(初期設定)として、構成はOffです。パスが有効化されている(オンに設定されている)場合、スキャンされたバーコード情報は、解読の為に、SoftPLC またはフィールドバスのどちらかに送られます。
プラント構造ワークスペース
でコントローラーを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列にスキャナのある構成の行をダブルクリックします。
または、追加を選択して、新しいスキャナ構成を作成します。
パラメーター | 説明 |
|---|---|
名称 | オプションの構成名 |
説明 | オプションの構成説明 |
パススルー= On | 解読の為、SoftPLC またはフィールドバスのどちらかに、スキャンされたバーコードが送られます。 |
パススルー = Off | スキャンされたバーコードはコントローラーで解読されます。 |
本セクション内
スキャナ構成
スキャナーは、ツールにインストールされ、ツールアクセサリバスに接続されるツールアクセサリです。スキャナーを作動させる機能ボタンが1つあります。
スキャナ構成では、OnかOffとしてパスを構成することが可能です。デフォルト(初期設定)として、構成はOffです。パスが有効化されている場合、スキャンされたバーコード情報は、解読の為に、SoftPLCまたはフィールドバスのどちらかに送られます。
スキャナの構成
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
追加をクリックして新しい構成を作成します。
[構成のタイプ] ドロップダウンから [スキャナ] を選択します。
[追加]をクリックします
選択した構成を設定します。構成はToolsTalk 2に自動的に保存されます。
パラメータ | 説明 |
|---|---|
パススルー= On | 解読の為、SoftPLCまたはフィールドバスのどちらかに、スキャンされたバーコードが送られます。 |
パススルー = Off | スキャンされたバーコードはコントローラで解読されます。 |
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
ソケットセレクタ
ソケットセレクタ構成の表示・編集または作成
ソケットセレクタは I/O に接続されており、オペレーターが、締め付け手順に正しいソケットを選択する際の手引きになります。
ソケットセレクタ構成の表示・編集
プラント構造
でコントローラを選択します。 構成
に移動します。ワークスペースエリアに、選択したコントローラに作成された構成のリストが表示されます。
選択したソケットセレクタ構成の名前をダブルクリックして、構成を表示または編集します。
ソケットセレクタ構成の作成
構成
で、追加を選択します。新しい構成の作成ポップアップウィンドウが表示されます。ドロップダウンリストから[ソケットセレクタ]を選択し、[追加]を選択します。
メニューのプロパティエリアに、構成の名前と説明を入力します。
ソケットセレクタ構成で、コントロールタイプの[自動]または[外部]を選択します。
有効にする各ソケットの位置に対して、チェックボックス
を選択します。無効にする各ソケットの位置に該当するチェックボックスをクリアします。
4 つのソケットのグループを追加または削除するには、追加または削除を選択します。
最大 32 のソケットセレクタの位置を使用できます。
構成の仮想ステーションへのアドレス指定と割り当ての詳細については、仮想ステーションセクション を参照してください。
ソケットセレクタのコントロールスイッチ
コントロールスイッチには次の 2 つの位置があります。
位置 | 説明 |
|---|---|
自動 | コントローラーは、ソケットセレクターのLEDランプを制御し、オペレーターが正しいソケットを選択できるようにします。 |
外部 | コントローラはソケットセレクタを制御しません。LED ランプのすべての機能は、オープンプロトコル通信またはフィールドバスモジュールを介して外部制御システムによって制御されます。 |
一般仮想ステーション
一般仮想ステーションの追加
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列に一般仮想ステーションを持った構成行をダブルクリックしてください。
または、 追加 を選択して、新しい一般仮想ステーション構成を作成します。
パラメーター | 説明 |
|---|---|
名称 | オプションの構成名 |
説明 | オプションの構成説明 |
同期締め付け または Flex コントローラーを使用する場合は、一般仮想ステーション構成で次のパラメーターも表示されます。
固定ステーション
自動有効化では、次のいずれかの設定を使用できます。既定の設定は [なし] です。
設定 | 説明 |
|---|---|
しない | 締め付けを実行するには、入力操作有効を高く設定する必要があります。 |
常時 | 入力した [操作有効] の状態にかかわらず、常に締め付けを実行できます。 |
一般仮想ステーション構成を適用するには、それを仮想ステーション セクションで仮想ステーションに割り当てます。
割り当てられていない一般仮想ステーション構成のみが削除できます。
[ツール]タブの使用
ツールワークスペースにはコントローラに接続されているツールのリストが表示されます。表示されるメニューは、固定ツールのコントローラか、携帯型ツールのコントローラで異なり、接続されているツールの詳細を表示します。
設定メニューでは、ツールのアラームが設定できます。これらのアラームのトリガポイントはツールメニューにあります。
ツールメニューを表示するには:
プラント構造ワークスペース
でコントローラを選択します。ツール
セクションに移動します。コントローラに接続されているツールのリストが表示されます。
列
説明
ツールタイプ
ツールのタイプを示します。
型式
ツールの詳細なモデル番号。
シリアル番号
ツールのシリアル番号。
MAC アドレス
MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。
ソフトウェアバージョン
ツールのソフトウェアバージョン。
最大トルク
ツールで可能な最大トルク値。
TurboTight の最大トルク
TurboTight 戦略を使用する際のツールで可能な最大トルク値。
特定のツールのみに適用されます。
TensorPulse の最大トルク
TensorPulse 戦略を使用する際のツールで可能な最大トルク値。
特定のツールのみに適用されます。
最大速度
ツールの最高回転速度。
次の校正
ツールの次の校正日。
仮想ステーション
ツールが接続されている仮想ステーション名。
チャネル
ツールのチャンネル番号。
表のツールのいずれかをダブルクリックして、詳細情報を表示します。
ツールの接続方法やワイヤレスペアリング方法については、コントローラのマニュアルを参照してください。
一般情報
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
型式 | ツールモデル名 |
シリアル番号 | ツールのシリアル番号。 |
MAC アドレス | MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。 |
製品番号 | オーダー番号と同じ。 |
ソフトウェアバージョン | ツールソフトウェアバージョン数。 |
一般的なツール情報は、ツール自体によって、コントローラまたはToolsTalk 2に表示されます。
限界
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
最大トルク | ツールが締め付けで使用できる最大トルク。 |
最大速度 | ツールの最高回転速度。 |
最小トルク | ツールが締め付けに使用できる最小トルク。 |
変速比 | 出力ギヤの角速度に対する入力ギヤの角速度の比率 |
ツール限度情報は、ツール自体によって、コントローラまたは ToolsTalk 2に示されます。
接続
コントローラへの接続と割り当てられている仮想ステーション。
サービス設定
校正
このメニューは、ツールが基準トランスデューサにどれだけ対応しているか、および差異を調整する方法を制御するために使用されます。
較正値はツールメモリに保存され、これを使って、正しいトルク値がコントローラで表示されるようツールのトルクトランスデューサで示されるトルク値を調整します。コントローラは最終校正日を表示します。
ツールの校正は、コントローラで行われ、トルク基準トランスデューサーを使用します。このプロセスは、Power Focus 6000 マニュアルに記述されています。
計算値を入力して新しい校正値をツールメモリに保存し、[設定]をクリックします。
パラメーター | 説明 |
|---|---|
最終校正 | 最終校正の日付。 |
校正値 | パラメータ入力ボックスに測定値と計算値を入力します。 |
次の校正 | 次回の校正期限。 |
セット | 入力した値を保存します。 |
メンテナンス
このツールは、サービス間隔数を保存し、ツールのメンテナンスまたはサービスが次に行われる前に締め付けを何回実行することができるかをカウントします。
パラメーター | 説明 |
|---|---|
最後の点検 | 最後の点検が実施された日時。最後のサービス日付は、修理工場で設定されます。最後のサービス日は、リセットボタンが押された現在の日時に設定されます。 |
サービスでの総締め付け数 | サービスの総締め付け数 は、最初にツールが使用されてから、ツールが行った締め付けの合計数です。この値は、サービス時に更新され、次のサービスまで同じままです。 |
残りの締め付け数 | サービス間隔に達するまでの残りの合計締め付け回数 |
サービス間隔 | 次のサービスの前に実施される締め付け数。10,000 の倍数で設定できます。 |
セット | コマンドは、サービス間隔パラメータ入力フィールドに入力した値を保存し、値を 10,000 の倍数に調整します。 |
サービスカウンタ/データのリセット | リセットコマンドは、カウンタをリセットし、最後のサービス日を現在の日付に設定します。 |
トランスデューサー情報
QST および IxB ツールでのみ有効です。
ツールには、ツールの種類に応じて複数のトルクおよび角度トランスデューサーが備わっている場合があります。画像にトランスデューサーの位置を示します。
トルクトランスデューサーまたは角度トランスデューサーの詳細については、[詳細] を選択してください。トランスデューサーのタイプに応じて、次の情報が表示されます。
情報 | 説明 |
|---|---|
有効 | トランスデューサーが有効かどうかを示します。 |
変速比 | トランスデューサーとツールの外軸との間のギヤ比。 |
ワインドアップ | 角度トランスデューサーのワインドアップ補償係数。 |
情報 | 説明 |
|---|---|
有効 | トランスデューサーが有効かどうかを示します。 |
シリアル番号 | 文字列としてのトランスデューサーのシリアル番号。 |
品番 | 文字列としてのトランスデューサーの品番。 |
校正値 | トランスデューサーの校正値をNmで表します。 |
正常性
環境モニターからのデータを示します。この機器は定期的にパラメータを測定して保存します。
パラメーター | 説明 | 値 |
|---|---|---|
リフレッシュ | コマンドボタン: ツール値を読み取ります。 | |
履歴 | コマンドボタン: | |
ツールモーター温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ツール電子機器の温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ゼロオフセットとシャント限度
FlexSystem でのみ使用できます。
ツールには、メイントルクトランスデューサとセカンダリトルクトランスデューサを1つずつ含めることができます。トルクトランスデューサごとに、制限値がここに示されています。
情報 | 説明 |
|---|---|
シャント限度 | 測定されたシャント校正値の最大許容値 (%)。 |
シャントドリフト限度 | 測定されたシャント校正値の最大許容変化 (%)。 |
ゼロオフセット限度 | 許容される最大ゼロオフセット補正 (%)。 |
ゼロオフセットドリフト限度 | 許容されるゼロオフセット補正の最大 (%)。 |
[仮想ステーション] タブの操作
仮想ステーションタブ は、コントローラがプラント構造 で選択されるとコントローラメニューバーに配置されます。
仮想ステーションは、コントローラーのソフトウェアを抽象化したものです。1 つのコントローラで複数の仮想ステーションの作成が可能です。各仮想ステーションはコントローラとして動作します。仮想ステーションには必要に応じてさまざまな構成を割り当てることができます。
仮想ステーションメニューから、タスクの選択、アクセサリー構成の割り当て、ツールの割り当て、診断を使用する送受信信号の監視と操作、通信プロトコルパラメータの設定ができます。仮想ステーションのアイコンは、FlexController とPower Focus 6000の両方で使用できます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
本セクション内
仮想ステーションの概要
仮想ステーションのワークスペースを開いて、仮想ステーションのリストを表示するには:
プラント構造ワークスペース
でコントローラーを選択します。メニューバーで仮想ステーション
タブを選択します。ワークスペースエリアに、コントローラーの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
列 | 説明 |
|---|---|
チェックボックス | 仮想ステーションを選択します。 |
名称 | 仮想ステーションの名前を示します。 |
説明 | 仮想ステーションの説明。 |
変更者 | 変更を行ったユーザー |
コントローラー更新 | コントローラーが最後に更新された時刻 |
コントローラー更新者 | コントローラーを更新したユーザー |
コマンド | 説明 |
|---|---|
追加 | 新しい仮想ステーションを作成します。 すべての機能を利用するには、新しく作成した仮想ステーションをコントローラーにプッシュする必要があります。 |
削除 | 選択した仮想ステーションをリストから削除します。 |
仮想ステーションの構成メニューにアクセスするには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
次のメニューが表示されます:
メニュー | 説明 |
|---|---|
プロパティ | 構成に名前と説明を指定します。オプション。 |
プロトコル | 外部通信プロトコルの有効化と構成。 |
ツール | 仮想ステーションにツールを割り当てます。 |
ツール構成 | 仮想ステーションにツール構成を割り当てます。 |
フィールドバスマッピング | コントローラーに構成され、割り当てられている場合に、フィールドバスマッピングを表示します。このフィールドは情報を示すだけです。実際のフィールドバスのマッピングと設定は、フィールドバスと SoftPLC |
タスク | 仮想ステーションにタスクを割り当てたり、ソース信号が実行するタスクを選択する方法を構成します。 |
アクセサリ | アクセサリー構成とアドレスをアクセサリーに割り当て、その組み合わせを仮想ステーションに割り当てます。 |
一般 | 一般仮想ステーションを割り当てるときに使用します。 |
手動モード | 手動モード機能の構成に使用します。 |
ライセンス | 仮想ステーションへのライセンスと機能の割り当て・削除に使用されます。 |
FlexControllerでは、プロパティ、フィールドバスマッピング、タスクメニューのみが使用できます。
関連情報
仮想ステーション - プロパティ
仮想ステーションには名前が必要です。これはプロパティメニューで指定します。既定の名は仮想ステーション < index nr >です。オプションの説明フィールドも使用できます。
名前フィールドを空白にすると、赤のエラーインジケーターが表示されます 。
仮想ステーションへのライセンスタイプと機能の割り当て
仮想ステーションエリアでは、ライセンスを特定の仮想ステーションに割り当てることができます。プラント構造
でコントローラーを選択して、次に 仮想ステーション タブを選択します。さまざまな仮想ステーションを含むリストが表示されます。
仮想ステーションタイプの割り当て
構成する行をダブルクリックします。
ライセンス構成で、仮想ステーションタイプ を選択します。
次のいずれかのオプションを選択します:
変更を選択して現在のタイプを変更すると、使用可能なタイプを含むダイアログウィンドウが開きます。
現在のタイプを削除するには、削除を選択します。
選択で、新しいタイプを追加します。タイプを選択し、[OK] を選択します。
仮想ステーション機能割り当て
構成する行をダブルクリックします。
ライセンス構成で、仮想ステーション機能 を選択します。
次のいずれかのオプションを選択します:
追加を選択して新しい機能を追加すると、使用可能な機能を含むダイアログウィンドウが開きます。機能を選択して[OK]をクリックします。
現在のタイプを削除するには、削除を選択します。
仮想ステーションへのタスク割り当て
仮想ステーションウィンドウのタスクメニューは、タスクの選択を制御します。
タスクメニューは、タスクの仮想ステーションへの割り当てに使用します。
機能 | 説明 |
|---|---|
名前 | 仮想ステーションへ現在割り当てられているタスク。 |
割り当て解除 | コマンドボタン。 仮想ステーションからタスクを選択解除します。 |
選択 | コマンドボタン。 タスクを手動で変更するか、外部ソースを構成してタスクを選択します。タスクの選択を構成するタスクの選択ポップアップウィンドウが開きます。 |
交換 | コマンドボタン。 タスクがすでに選択されている場合、[選択]コマンドボタンは[変更]に置き換えられます。[変更]を選択して、新しいタスクを選択します。 |
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
タスクメニューで選択をクリックします。
タスクの選択ポップアップウィンドウが表示されます。
[同期モード]、[ソース]または[バッチシーケンス]タブで目的のタスクを選択します。
選択をクリックします。タスクの選択ポップアップウィンドウが閉じます。
閉じるボタンをクリックすると、何も変更せずにポップアップウィンドウを閉じます。
プッシュ機能でコントローラを更新します。
タスクメニューの名前フィールドが更新されます。
ソース番号と ID 番号を使用するタスク選択と、タスク選択のための識別子文字列の詳細については、ソース構成のマニュアルを参照してください。
関連情報
仮想ステーション - プロトコル
プロトコルメニューには、単一または複数の通信プロトコルとパラメータ設定が実装できます。使用できるプロトコルは、IAM ライセンスによって異なります。
一部の通信プロトコルは、プロトコルメニューで構成します。
本セクション内
オープンプロトコル
オープンプロトコルの構成
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
プロトコル メニューの構成をクリックします。
仮想ステーションのオープンプロトコル構成スイッチは、工場制御機器の一部である、仮想ステーションと整数との間のオープンプロトコル通信を有効または無効にできるようにします。
オープンプロトコル通信を有効または無効にするには、[オン]または[オフ]を選択します。
オープンプロトコルは、設定に使用されるか、あるいは強化結果をもたらすコントローラの同じイーサネット接続ファクトリを使用します。
各バーチャルステーションは、ポート番号で独自に特定されます。オープンプロトコルを使用する各バーチャルステーションで、ポート番号をポートフィールドに入力する必要があります。
レガシカウンタ設定では、シーケンスのすべての締め付けをカウントし、その数値を二次システムに出力します。この設定を有効にするには、レガシーカウンタを使用をオンに設定します。
SoftPLCインデックスは、共有メモリ内でオープンプロトコルのコマンドが書き込まれる場所をマッピングするために使用されます。既定値は 1 ですが、1 ~ 6 の値を入力できます。
SoftPLCインデックス の既定値は常に 1 で、使用中かどうかを確認するチェックは行われないため、仮想ステーションの追加時に同じインデックスが複数回構成されるようにシステムを構成している可能性があります。この場合、Soft PLC は、着信 MID がどの仮想ステーションから発信されているかを判断できません。
仮想ステーションでのフィールドバスマッピング
コントローラーには、フィールドバス通信モジュールをインストールできます。この通信モジュールは、すべての仮想ステーションに機能します。フィールドバスマッピングメニューは、コントローラーにマッピングされているフィールドバス構成を示します。フィールドバスが構成され、この構成は フィールドバスと SoftPLC で割り当てられ、マッピングされます。
本セクション内
フィールドバス診断
フィールドバスマッピング診断機能にアクセスするには:
プラント構造ワークスペース
でコントローラを選択します。 仮想ステーション
に移動します。ワークスペースエリアに、コントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
仮想ステーション名をダブルクリックして既存の構成を開くか、追加を選択して新しい仮想ステーション構成を作成します。
ワークステーションには、マッピングされているフィールドバスなどのメニューが表示されます。
診断ボタンをクリックして、フィールドバス診断機能を入力します。
フィールドバス診断機能は、フィールドバスで送受信される、送受信信号を監視できます。強制モードから情報を操作し、フレームの作成と送信をすることもできます。フィールドバス診断は次から使用できます。
コントローラ GUI
Web GUI
ToolsTalk
診断モード | 監視モードまたは強制モードを有効にします。 監視モード: 監視モードでは、フィールドバスで送受信される送受信フレームで構成されたすべてのフィールドの状態を見ることができます。受信フレームのビットに変更があれば、ビューが更新されます。 強制モード: 強制モードになると、データが現在の状態に固定され、フレームがロックされます。強制モードでは、信号を手動で有効化および無効化することも、値を入力して 1 つ以上の信号に強制することもできます。これは受信フレームまたは送信フレーム、またはその両方で可能です。 |
ブール値コンバーター | システムビューとバスビューの間のスイッチ。コンバーターは、フィールドバスで送受信される信号を反転できます。 |
タイプ | 信号のタイプ。 |
バイト | フレームの位置。 |
ビット | フレームの位置。 |
長さ | フレームの信号の長さ。 |
名前 | 信号の名前。 |
コンバーターあり | コンバーターが構成されている場合、コンバーターありははいになります。 はいの場合、信号を反転するためにコンバーターを使用できます。いいえの場合、コンバーターは適用されません。 |
値 | 値列は、信号とその値のリストを表示します。送受信フレームの各信号の値は、タイプに応じてブール値、整数、文字列のいずれかの形式で表示されます。値は強制モードで編集できます。単一の信号、同じフレームの複数の信号、またはすべての信号を変更することができます。 値を変更すると、フレームの送信ボタンをクリックして新しいフレームをコントローラにプッシュし、新しい値を適用します。 診断モードを終了すると、すべての値は、送受信信号の最後に保存されたフレームの値に戻ります。 |
同時に有効にできるのは 1 つの診断セッションのみです。診断がすでに使用されている場合は、情報メッセージが画面で表示されます。
仮想ステーションへのアクセサリの割り当て
このメニューは、携帯型ツールをサポートするコントローラ専用です。
コントローラは CAN バスから複数のアクセサリーに接続できます。各アクセサリーには、1 ~ 15 の範囲のバスに固有のアドレスが必要です。仮想ステーションに複数のアクセサリーを割り当てることができます。
アクセサリーに仮想ステーションを割り当てるには、アクセサリーにはアクセサリー構成が割り当てられている必要があります。
バーチャルステーションに現在割り当てられているアクセサリーを表示するには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
機能 | 説明 |
|---|---|
チェックボックス | 仮想ステーションから割り当て解除ができるアクセサリー構成を選択します。 |
名前 | アクセサリーに割り当てられている構成の名前。 |
タイプ | アクセサリーのタイプ。 |
CAN ノード | アクセサリーの CAN アドレス。 |
シリアル番号 | アクセサリーのシリアル番号。 |
ステータス | 次のいずれか。
|
CAN ノード列には、新しいアクセサリーの接続時に使用できない使用済みのアドレスが示されます。ソケットセレクタの割り当てには、複数のアドレスを含めることができます。
ソケットセレクタには、CAN ノードの順番が重要です。最初のソケットセレクタの最下位の位置が、最初に割り当てられます。
機能 | 説明 |
|---|---|
割り当て解除 | 選択されたアクセサリーが仮想ステーションから割り当て解除されます。アクセサリーはコントローラに接続されたままになります。 |
選択 | 新規アクセサリーを追加します。アクセサリーのポップアップウィンドウが開きます。 |
診断 | I/O 信号挙動を監視し、コントローラの内部論理とアクセサリー間で指定する状態に信号を強制することが可能です。 |
関連情報
本セクション内
仮想ステーションへのアクセサリの追加
選択したアクセサリーには固有で有効な CAN バスアドレスが必要です。アクセサリー構成はアクセサリーに割り当てられ、アクセサリーは仮想ステーションに割り当てられます。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションにアクセサリーを割り当てるには:
アクセサリーメニューの選択ボタンをクリックし、アクセサリーポップアップウィンドウを開きます。
タブの 1 つでアクセサリーのタイプを選択します。
内部入出力
ソケットセレクタ
I/O 拡張器
オペレータパネル
スタックライト
スキャナー
Indicatorbox
- をクリックして構成のリストから構成を 1 つ選択します。
該当する場合は、
をクリックして使用可能な CAN ノードのリストからアドレスを 1 つオンにします。選択ボタンをクリックして、アクセサリー・オプションを一つ追加します。
仮想ステーションに割り当てる各アクセサリーに手順を繰り返す。
キャンセルボタンをクリックし、ポップアップウィンドウを閉じます。
アクセサリーメニューが更新され、新しく割り当てられた構成が表示されます。
アクセサリーアドレスは、アクセサリーの回転スイッチで設定されます。アクセサリーの詳細製品情報文書を参照してください。アクセサリーアドレスの範囲は、1~15 の範囲です。
関連情報
仮想ステーションからアクセサリの割り当てを解除する
アクセサリ構成の割り当てを解除し、仮想ステーションへの接続を解除するには、次のステップに従います。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
アクセサリメニューで、割り当てを解除するアクセサリ構成のチェックボックスをオンにします。
アクセサリーメニューで割り当て解除コマンドボタンを選択します。
変更を反映してコントローラを更新するには、変更のプッシュ配信 コマンドボタン
を選択します。
アクセサリメニューの一覧が更新されます。
関連情報
一般仮想ステーション構成の割り当て
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションに一般構成を割り当てるには:
仮想ステーション構成ワークステーションで、一般エリアに移動します。
変更を選択します。ポップアップウィンドウに表示される一般構成は構成
に追加されているものです。一般構成を 1 つ選択して変更ボタンを選択します。
選択した一般構成で一般メニューが更新されます。
割り当てられていない一般仮想ステーション構成のみが削除できます。
コントローラ情報タブの操作
コントローラ情報 タブのメニューでは、単一の選択コントローラについての情報を示します。
コントローラ情報メニューの表示:
プラント構造ワークスペース
でコントローラを選択します。[コントローラ
]タブに移動します。ワークスペースエリアにコントローラメニューが表示されます。
コントローラワークスペースに次のメニューが示されます。
メニュー | 機能 |
|---|---|
コントローラ情報 | コントローラと IAM モジュールの一般情報を示します。 コントローラが無効な情報または設定を送信した場合、影響を受けるパラメータとともに例外がエラーメッセージとして表示されます。 |
ライセンス | コントローラに発行されたさまざまなライセンスタイプに関する情報を提供します。 |
ソフトウェア | コントローラのソフトウェア構成に関する情報を示します。 |
ハードウェア | コントローラのハードウェア構成に関する情報を提供します。 |
エクスポート/インポート | コントローラの結果と構成のエクスポートと、コントローラ構成のインポート。ファイル位置のためのダイアログボックスが表示されます。 |
正常性 | 環境パラメータとシステムの正常性パラメータの監視と記録を行います。 |
表示される情報は情報を示すだけです。パラメータの設定はメニューではできません。
コントローラ情報と IAM メニュー
インテリジェントアプリケーションモジュール(IAM)は、コントローラドアの内側にあります。IAM にはコントローラプログラム、構成パラメータおよび保存結果が含まれています。
IAM モジュールは容易に取り外し、他のコントローラへ移動することができ、その後で前のコントローラと全く同じように機能します。
コントローラ情報メニューと現在の構成を表示するには:
プラント構造
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
型式 | コントローラのタイプに関する一般情報を示します。 |
Serial number (シリアル番号) | コントローラのシリアル番号に関する情報を示します。 |
イーサネット用サービスポート | サービスポートの IP アドレスに関する情報を示します。このポートから、サービスエンジニアは工場ネットワークに接続することなく、コントローラにアクセスできます。 |
メニュー | 機能 |
|---|---|
タイプ | アトラスコプコは種々の機能を備えた異なる IAM タイプを提供しています。 |
顧客キー | アプリケーション特定、または顧客特定の構成のための識別子です。 |
Serial number (シリアル番号) | IAM モジュールのシリアル番号に関する情報を示します。 |
ソフトウェアメニュー
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
現在のバージョン | 主要な有効で動作中のソフトウェア。 |
保存したバージョン | 保存されている無効なソフトウェア。 |
インストールされているソフトウェアのバージョンを切り替えることも可能ですが、これには次の 2 つの利点があります。
コントローラソフトウェアは通常作業と並行してコントローラにロードすることができる。いくつかのコントローラを更新する際にすべてのコントローラを同時にすばやく切り替えることができます。
ソフトウェアアップグレードが予期しない結果となった場合、以前のバージョンへ切り替えることで迅速にバックアップによる解決ができる。
ライセンス
このフィールドには、コントローラに発行された使用可能なライセンスタイプと機能が表示されます。
ハードウェア構成
このメニューには、システムハードウェア構成に関する情報が示されます。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
ハードウェアメニューには、コントローラを構成するさまざまなハードウェアモジュールが一覧表示されます。
各モジュールについて、次のデータが示されます。
Serial number (シリアル番号)
製品番号
ソフトウェアバージョン
エクスポートとインポート
エクスポートおよびインポートの機能を用いて、外部プログラムでの分析のために、結果メニューでアクセスできるイベントと締め付け結果をエクスポートするとともに、コントローラー間で締め付けプログラム、バッチ、およびコントローラー構成を転送します。
エクスポートコマンドは、次の目的に使用できます。
さらに処理するために締め付け結果やイベントをエクスポートする。
アトラスコプコのサービスエンジニアによるデバッグ作業のための、ログファイルのエクスポート。
別のコントローラーに構成をコピーするために使用できるコントローラー構成全体のエクスポート。
違いを見るための、エクスポートされた 2 つの構成の比較。
コントローラー情報のエクスポート
プラント構造
でコントローラーを選択します。コントローラー
に移動します。ワークスペースエリアにコントローラーメニューが表示されます。
エクスポートボタンをクリックして、次のいずれかをエクスポートします。
パラメーター
説明
エクスポート
すべてのコントローラー情報をエクスポートします。
構成のエクスポート
設定と構成をエクスポートします。
ツールログのエクスポート
接続されているツールからログ (締め付けおよびハードウェアの情報) をエクスポートします。SRB、TBP、STB、QST-M で使用できます。
エクスポートは atlas_tool_i.zip と ExportInfo.txt から構成されます。
エクスポートファイルを保存する場所を選択して、OK をクリックします。
コントローラー情報のインポート
プラント構造
でコントローラーを選択します。コントローラー
に移動します。ワークスペースエリアにコントローラーメニューが表示されます。
コントローラー構成をインポートするには、インポートコマンドボタンをクリックします。
ファイルを開くをクリックします。インポートするファイルを選択します。
インポートするファイルは事前にエクスポートされているファイルである必要があります。
インポート機能を使うと、締め付けプログラム、バッチ、アクセサリ、コントローラーの設定はすべてインポートファイルの設定と置き換えられます。ただし、ネットワークの設定、PIN、結果およびイベントはインポートされません。
自動バックアップ
自動バックアップウィンドウは、sFTPエクスポートを有効または無効にします。
デフォルトでは、 sFTP エクスポートスイッチ有効化 はオフに設定されています。
sFTPエクスポート有効化スイッチをオンにすると、最後の構成変更の10分後にエクスポートファイルが作成されます。
システムの起動時にsFTPエクスポート有効化スイッチがオンに設定されている場合、エクスポートファイルは2〜3分以内に自動的に作成されます。システムがシャットダウンする前に行われた可能性のある変更を反映するために、エクスポートファイルは2〜3分以内に作成されます。
新しいバックアップファイルが使用可能になる前に、古いバックアップファイルが削除されます。
エクスポートされたファイルのデータには、コントローラーのすべての構成と設定が含まれます。
sFTPユーザーは、システムの次のディレクトリに保存されているエクスポートファイルを取得できます:/Export/<エクスポートファイル名>
sFTPをサポートするシステムが必要となります。
sFTPユーザーはファイルを取得するためにパスワードを使用する必要はありません。
sFTPユーザーのユーザー名は次のとおりです:
ユーザー名 | 自動エクスポート |
システム正常性モニター
機器の正常性モニターでは、パラメータを定期的に測定して、保存します。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
正常性メニューには環境データとシステム正常性情報が表示されます。
情報 | 値 | 説明 |
|---|---|---|
リフレッシュコマンドボタン | 摂氏または華氏 | コントローラから情報を読み取り、最新の結果を表示します。 |
コントローラー温度 | 摂氏または華氏 | 月/日/年 時:分:秒で表示される最新の温度記録値。 |
バッテリーステータス | OK/NOK | コントローラのコンピュータボードでメモリとリアルタイムクロックバッテリーを監視します。 ステータスメッセージの NOK は、データの喪失や間違った結果を避けるために、早急にバッテリーの充電が必要なことを意味します。 月/日/年 時:分:秒で表示される最新の記録値。 |
履歴コマンドボタン | モニター測定値のリストを示します。 |
サーバー接続状態
サーバー接続状態は、サーバーの接続ステータスを示します。現在、ToolsNetに接続されているサーバーのみが使用可能です。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
[サーバー接続状態]メニューには、サーバーのステータスが表示されます。
情報 | 説明 |
|---|---|
リフレッシュコマンドボタン | コントローラ-から情報を読み取り、最新の結果を表示します。 |
構成 | コントローラで構成が有効になっているかどうかを示します。構成を有効にするには、コントローラーの[設定]でサーバー接続を構成します。 |
接続 | サーバーへの接続のステータスを表示します。OK/NG |
サーバーメッセージ | サーバーからのメッセージ。 |
[設定] タブの操作
プリファレンス
設定メニューにはプリファレンスセクションが含まれ、コントローラインターフェースの言語、トルク単位、PIN による保護の選択に使用できます。
コントローラプリファレンスを設定するには:
プラント構造
でコントローラを選択します。 設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
コントローラプリファレンスのパラメータ:
パラメータ | 説明 | 既定 |
|---|---|---|
Torque unit (トルクの単位) | コントローラの GUI または Web GUI でこのコントローラに表示されるトルク測定結果の単位を選択します。 | Nm |
Temperature unit (温度の単位) | コントローラの GUI または Web GUI でこのコントローラに表示される温度測定結果の単位を選択します。 | 摂氏 |
言語 | コントローラの GUI または Web GUI でこのコントローラに表示されるコントローラの言語を選択します。 | 英語 |
工場出荷時ポート経由でのアクセス | オン/オフ。コントローラとの通信の有効化 (オン) または無効化 (オフ)。 | オン |
PIN の使用 | コントローラの GUI または WebHMI(工場ネットワーク)からアクセスすると、このコントローラの PIN を有効にできます。 PINは、GUIまたはWebHMIを介してコントローラにアクセスするユーザーにのみ適用されます。PINが有効化されているため、ユーザーは、ToolsTalk 2からロックアウトされたり、またはToolsTalk 2のコントローラの構成作業(構成および構成のプッシュ)からロックアウトされることはありません。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。 | オフ |
サービスポートにPINを使用 | PINは、サービスポートを介してアクセスする際にコントローラで有効化することができます。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。
| オフ |
PIN コード | 追加する各ユーザーをに、4 桁の PIN コードを選択します。ユーザー PIN の有効化/無効化。 | |
アイドル時間タイムアウト | コントローラ GUI または Web GUI が、アイドル時間タイムアウト後に自動的にロックされます。最小値は20秒です。 | 120 秒 |
[PINを使用]が[オフ]に設定されている場合でも、PINコードとアイドル時間タイムアウトは編集に対して有効になっています。
関連情報
本セクション内
PIN 設定
PIN を使うことで、コントローラの不正利用や偶発的な変更を防ぐことができます。コントローラに1つまたは複数の異なるPIN構成を設定することができます。構成方法の1つに、ToolsTalk 2ソフトウェアを使用する方法があります。ユーザーは、1つまたは複数のPIN構成を同時に有効化するかどうかを決定できます。コントローラ には最大 10 人のユーザーを追加でき、それぞれには独自の PIN が割り当てられます。
各PIN構成には、PINコード、ユーザー名、ユーザー/ PINを有効または無効にするためのスイッチ、およびユーザーがアクセスできる使用可能な構成のリストがあります。
PINが有効化されており、画面がロックされている場合、GUIの右上隅にロックされたた南京錠のアイコンが表示されます。ユーザーは、選択された構成にのみPINコードを入力せずにアクセスして変更を加えることができます。また、選択されていない構成は、読み取り専用アクセスのみで参照できます。選択されていない構成はグレー表示されるか、無効になります。
画面ロックは、一定時間操作がないと自動的にオンになり、この時間はユーザーが構成できます。
アイドル時間の最小値は20秒で、最大値は600秒です。アイドル時間は構成可能で、すべてのPIN構成に適用されます。
システムの起動後、現在のアイドル時間に関係なく、PINがオンの場合、コントローラはロックされます。
PIN が有効になると、次を介して コントローラにアクセスする際にPIN コードが 要となります:
コントローラ GUI から
Web GUI から
PIN の構成
設定メニューで、PIN の使用をオンにします。
[PINコード(暗証番号)] を選択します。
新規ユーザーのPINコードを追加する
[PINコード]ダイアログウィンドウで[追加]を選択します。
名前フィールドにユーザー名を入力します。
[PINの設定]フィールドにPINを入力して、ユーザーのPINを設定し、[PINの繰り返し]フィールドに同じPINを繰り返し入力ます。PIN は 0000~9999 の範囲の4桁の数字でなければなりません。
両方のフィールドの PIN ([PINの設定] と [PINの繰り返し]) が一致している必要があります。
[有効]チェックボックス
をオンにしてそのユーザーのPINコードを有効にします。 PIN が有効になると、構成したアイドル時間の後にコントローラが自動的にロックされます。
PINを無効にするには、そのユーザーの[有効]チェックボックスをオフにします。
ユーザー / PIN の削除
ユーザーのリストで、削除する各ユーザー PIN のチェックボックスをマークして、削除ボタンを選択します。
コントローラのユーザーアクセス設定
特定のユーザに対する、コントローラのさまざまな機能に対して、有効なPINコードを設定することができます。
[ユーザーグループの編集]を選択して、そのユーザーのさまざまな機能のPINコードを構成します。
[コントローラーユーザーアクセスの設定]ウィンドウが開き、最上位のセクション(フォルダー形式)には、それに関連するすべての機能が含まれています。下向き矢印を選択して展開すると、そのセクションで使用できるすべての機能が表示されます。
読み取り専用アクセスは全ユーザーに対して、機能とプログラムのすべてにデフォルトで割り当てられます。
ユーザーにアクセスを提供する必要がある機能で[作成と削除]列の下にあるチェックボックス
を選択します。 [作成と削除] は、ユーザーに完全な書き込みアクセスを提供します。
最上位のフォルダーにあるチェックボックス
を選択した場合、そのフォルダー内のすべての機能も選択されます。特定の機能の選択を解除するには、チェックボックスを展開してオフにします。フォルダ内のすべての機能が選択されていない場合、チェックボックスには「X」の印の代わりにダッシュ(-)が表示されます。保存 を選択します。
[押す]
はPIN構成を有効にするためのコントローラーを変更します。
異なる権限を持つ新しいユーザーがコントローラーGUIに追加された場合、新しいユーザーは[PINコード]ダイアログウィンドウにも表示されます。そのユーザーのアクセス権を表示または変更するには、[ユーザーグループの編集]を選択します。
PIN でロックされている場合のコントローラへのアクセス
有効な PIN でコントローラーにアクセスすると、PIN を求めるプロンプトが表示されます。これは、Web GUI またはコントローラ GUI を介してコントローラにアクセスする場合です。
ステーションセットアップのPINコード
ステーションセットアップアプリケーションにおいて、コントローラーでPINが有効になっている場合、そのコントローラーのToolsTalk 2ソフトウェアにアクセスする際はPINコードを入力する必要があります。PINが有効になっているコントローラーにユーザーがアクセスしようとすると、PINコードを要求するダイアログウィンドウが表示されます。
[PINの入力(コントローラーPIN)]ダイアログウィンドウにPINを入力します。
PINが認証されると、ユーザーは有効なすべての構成にアクセスできます。ただし、現在のセッションからログオフした場合、PINを再度入力する必要があります。
ツールサービスアラーム
設定メニューにはツールセクションがあり、サービスインジケータアラームと校正アラームを表示する、ツールアラームを選択するために使用されます
ツールアラームを設定するには:
プラント構造
でコントローラを選択します。 設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
パラメータ | 説明 | デフォルト | 位置 |
|---|---|---|---|
点検インジケータアラーム | スイッチで選択されます。 アラームをオン、またはオフにします。サービス間隔に達するとアラームがトリガされます。 | オフ | |
較正アラームの表示 | スイッチで選択されます。 指定期間内にツールが較正されていない場合較正アラームがトリガされます。最終較正日はツールメニューで確認できます。デフォルト設定の間隔は 1 年ですが、コントローラ GUI または Web GUI から変更可能です。 | オフ |
サーバー接続
ライセンスサーバーとのコントローラー通信
機能は、機能管理システムからコントローラに一時的または永久に追加できます。追加された機能は、ライセンスサーバーで管理されます。コントローラ GUI、Web GUI、または ToolsTalk 2 GUI からアクセスできます。
サーバーへのアドレスを構成する必要があり、それはコントローラの設定 から行います。
コントローラとライセンスサーバー間の通信を設定するには:
プラント構造
でコントローラを選択します。[設定
]タブに移動します。ワークスペースエリアに設定メニューが表示されます。
ライセンスサーバーメニューで、該当する位置のスイッチを設定して通信を有効化または無効化します。
通信が有効になっている場合は、サーバーのホストアドレスを設定します。
通信が有効になっている場合は、サーバーのポート番号を設定します。
同期ボタンをクリックして、コントローラとライセンスサーバー間の機能管理を同期します。
パラメータ | 説明 | 既定 | コメント |
|---|---|---|---|
ライセンスサーバー有効 | ライセンスサーバーとの通信を有効または無効にします。 | オフ | |
サーバーホスト | サーバーの IP アドレス。 | ||
サーバーポート | サーバーのポート番号。 | ||
同期 | コマンドボタン。 ライセンスをライセンスサーバーと同期します。 | 通信が有効な場合に表示されます。 |
「同期」コマンドは、コントローラとライセンスサーバー間の同期を強制します。通常、コントローラがサーバと正常に通信している場合、同期は定期的に自動的に行われます。同期が定期的に行われない場合、コマンドボタンを使用できます。
関連情報
ToolsNet サーバーとのコントローラの通信
コントローラは常に締め付け結果をToolsTalk 2に送信します。コントローラは、さらに処理を行うために、ToolsNet に結果を送信することもできます。ToolsNet 8サーバに対するアドレスは、コントローラで構成する必要があります。
コントローラと ToolsNet サーバー間の通信を設定するには:
プラント構造
でコントローラを選択します。設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
ToolsNet に移動して、ToolsNet サーバーとの通信を有効または無効にします。
通信を有効にする場合、サーバーの IP アドレスとポート番号を設定します。
パラメータ | 説明 | デフォルト | コメント |
|---|---|---|---|
ToolsNet が有効です | サーバーとの通信を有効/無効にします | オフ | |
サーバーホスト | ToolsNet サーバーの IP アドレス。 |
| 通信は有効化されています。 |
サーバーポート | ToolsNet サーバーポート。 |
| 通信は有効化されています。 |
関連情報
リモートロギング接続の構成
コントローラーをリモートロギングサーバーに接続するには、コントローラーでリモートロギング設定を構成してアクティブにします。
プラント構造
でコントローラを選択します。設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
リモートロギング セクションで、次のパラメータを構成します。
フィールド
説明
オン/オフ
リモートロギングサーバーとの通信を有効/無効にします。
プロトコル
TCP または UDP プロトコルを選択します
サーバーホスト
リモートロギングサーバの IP アドレス
サーバーポート
リモートロギングサーバーポート
各施設に適切なログレベルを選択します。
ログレベル
SysLog 分類
Error(エラー)
アラート、クリティカル、非常、エラー
警告
警告
情報
情報、通知
[設定] を選択して、コントローラーに構成を適用します 。
コントローラの日時
各コントローラは、正確なレポート作成のためにその時刻と日付がプログラムされている必要があります。
プラント構造ワークスペース
でコントローラを選択します。[設定
]タブに移動します。ワークスペースエリアには、一般設定メニューが表示されます。
時間参照のソースを選択します。
選択した時間ソースに応じて、追加のパラメータを入力します。
タイムゾーンショートカットメニューから、コントローラのローカルタイムゾーンを選択します。
時間を最も正確にし、安定させるため、すべてのコントローラと通信できる NTP サーバーの使用を推奨します。
時間ソースはショートカットメニューから選択され、次のいずれかにできます。
コントローラに日時を手動で入力。これはすべての GUI インターフェースから可能です。
標準化されているネットワークタイムプロトコル (NTP) の使用。接続されているコントローラへのサーバー配信時間参照。2 つまでの異なる NTP サーバーに構成できます。
コントローラが接続され、ToolsNet サーバーにオンラインの場合の、時間参照としての ToolsNet サーバーの使用。ToolsNet を時間参照として使用する場合、サーバーとコントローラが異なるタイムゾーンにあっても、同じタイムゾーンに設定されていることが重要です。
日付と時間を追加して構成するには:
パラメータ | 状態 | 説明 |
|---|---|---|
ソース | ショートカットメニューから選択します。 コントローラの時間と日付を構成する方法を選択します。 | |
タイムゾーン | ショートカットメニューから選択します。 コントローラのあるタイムゾーンを選択します。 | |
Time (時間) | ソース = 手動 | 時間:分:秒の形式で時間を入力します。 |
Date (日付) | ソース = 手動 | カレンダーの記号から日付を入力します。 |
設定コマンドボタン | ソース = 手動 | 入力された日時をコントローラに送信します。このコマンドを実行するには、コントローラがオンラインである必要があります。 |
追加コマンドボタン | ソース = NTP | 追加 NTP サーバーアドレスを追加します。 |
削除コマンドボタン | ソース = NTP | 選択された NTP サーバーアドレスを削除します。 |
NTP サーバー | ソース = NTP | NTP サーバーの IP アドレスを入力します。 |
イベントメニュー
イベントは、オペレーターに報告されるエラーなど、操作の状態やその他の情報です。すべてのイベントは構成でき、異なる重要度を指定できます。
イベントタイプ | 機能 |
|---|---|
ディスプレイ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示されます。 |
ログ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示され、ログファイルに書き込まれます。これらは [イベント] |
確認 | イベントはオペレーターの確認を得る必要があります。イベントを確認するには、オペレーターはアクセサリーのボタンを押すか、コントローラのタッチ画面をタップするか、Web GUI からイベントを確認する必要があります。 |
イベント構成は、各イベント信号の取り扱い方法を決定します。
A | イベント検索ウィンドウ | B | イベントリスト |
すべての取得可能イベントはリファレンスの章で一覧にまとめられています。イベントには 2 つのカテゴリがあります。
アトラスコプコが定義する標準イベントは各成果物に取得可能です。
カスタムイベントは顧客要請があった際にアトラスコプコが実施し、特定の顧客に対してのみ有効かつ取得可能になっています。
関連情報
本セクション内
イベント構成
イベントの処理方法を構成するには:
プラント構造ワークスペース
でコントローラを選択します。[設定]
タブに移動し、[イベント] を選択します。検索ウィンドウを使用して特定のイベントを検索するか、セクションを選択して展開し、イベントをスクロールして目的のイベントコードを見つけます。
次の 1 つまたは複数を選択または選択解除します。
イベントが表示され、オペレーターによって確認されるようにするには、確認。
イベント
が表示され、ログファイルに書き込まれるようにするには、ログ。
イベントが画面に表示されるようにするには、表示。
詳細フィールドは、コメントを書き込むのに使用できます。
準備が完了したら、変更を特定のコントローラにプッシュ配信します。
構成する各コントローラーごとにステップの 3 - 5 を繰り返します。
イベントコード番号 0000 ~ 7999 は標準イベントです。
イベントコード番号 8000 ~ 9999 は顧客特定のイベントです。
ライブラリへのイベント追加
設定
を選択し、イベント構成タブで 管理を選択します。ドロップダウンリストから ライブラリに追加を選択します。グローバル構成の作成 ダイアログボックスが開き、次の 2 つの構成オプションが表示されます。
自動で元に戻すが規定で設定されています。
リンク解除
作成 を選択すると、イベント設定がロックされ、グローバルイベントライブラリに表示されます。
アクション | 結果 |
|---|---|
自動で元に戻す | ToolsTalk 2でプログラムがグローバルイベントとしてマークされている場合、コントローラーの GUI または Web GUI を使用したイベントの更新は無視されます。 更新が行われ、ToolsTalk 2 に送り返されます。この場合、変更は認識されますが、承認されません。すると当初のグローバルイベントプログラムは、コントローラに即座にプッシュして返送されます。 |
リンク解除 | コントローラ GUI または Web GUI からイベントを更新すると、影響するコントローラのプログラムがグローバルイベントからローカルイベントに変わります。 更新が行われ、ToolsTalk 2 に送信され、変更が認識されます。その結果、イベントはコントローラへの配信リストから即座に削除されます。 |
グローバルイベントがコントローラに配信されるように構成されている場合には、自動で元に戻すことまたはリンク解除を選択する必要があります。後で選択を変更することはできません。
拡張ロギング
ログは自動的に作成および保存できます。これらのログは、ロググループを使用して拡張ロギングを含めるように構成できます。
ロググループのデフォルト設定はオフです。ロググループを有効にするには:
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。ロググループ ウィンドウで、有効にするグループを選択します。
[SET] を選択します。
ロググループのリセット
すべてのロググループをデフォルト設定にリセットすることができます。
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。[ロググループのリセット] ウィンドウで、[リセット] を選択します。
永続ロググループ
ロググループは、再起動するたびにデフォルト設定にリセットされます。リセットを防ぐには、永続ロググループを使用します。
プラント構造
でコントローラを選択します。 [設定]
に移動し、[拡張ログ] タブを選択します。[再起動後に選択を保持] ウィンドウで、[永続] を [オン] に設定します。
フィールドバス、SoftPLC、非周期データタブの操作
フィールドバス、非周期、SoftPLCは、プラント構造で単一のコントローラーが選択されている場合、フィールドバスと SoftPLC タブにあります。
フィールドバスは、工場管理システム(フィールドバスマスター)とリモートノード(フィールドバスの下位)の間の通信リンクです。
フィールドバスと SoftPLCは4つのセクションに分かれています:
概要
フィールドバス
SoftPLC
非周期
フィールドバスの概要
フィールドバス通信を使用する一般的な工場管理制御システムがコントローラと通信する場合、次のようになります。
A | フィールドバスマスター (PLC) | B | フレームの見出し |
C | プロセスデータフレーム内の複数の仮想ステーションとのユーザーデータの送受信 | D | 仮想ステーション |
E | 複数の仮想ステーションを持つコントローラ |
通常 PLC であるフィールドバスマスターは、フィールドバス下位と呼ばれる多数のリモートノードと情報を交換します。マスターは、一度に 1 つの下位と通信します。マスターは下位にフレームを送信し、応答として別のフレームを受信します。
PLCはAnybusモジュールにデータを送信し、コントローラと通信します。コントローラには、識別データ、タスク選択情報、その他の信号が含まれます。
コントローラは、イベント信号、ステータス信号、締め付け結果、その他の信号を含む可能性のあるAnybusモジュールを介してPLCに応答を送信します。
プロセスデータの更新頻度は異なる場合があります。コントローラとAnybusモジュール間の更新周波数は約100Hzであり、AnybusモジュールとPLC間の更新周波数は約500Hzです。
物理的な伝送リンクは、選択されたフィールドバスタイプによって異なります。伝送は、アドレス情報を含むフレームの見出しと、すべてのデータを含むプロセスデータフレームで構成されます。
コントローラが仮想ステーションをサポートする場合、正しい情報を各仮想ステーションに指定することが重要です。プロセスデータフレームには、1 つ以上のフィールドバスマップ (各仮想ステーションに 1 つ) を含むことができます。
フィールドバス構成パラメータ
最下位ビットの位置を定義することで、項目はフィールドバスマップに配置されます。この位置はバイト番号とビット番号で識別されます。
情報 | 説明 |
|---|---|
開始バイト | 項目の最下位バイトがあるバイト番号。0 から、サイズマイナス1の数の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
開始ビット | 項目の最下位ビットが配置されているビット番号。前に選択された開始バイトから始まります。0 から 7 の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
長さ | 項目のビット数を表す数値。 |
範囲 | 情報のみ。選択した項目の最小の長さ、最大の長さ、デフォルトの長さの情報を示します。 |
コンバーター | 使用可能な信号コンバータのドロップダウンリスト。デジタル形式での項目の表示方法について、SoftPLC に要件がある場合に使用されます。 |
項目コンバーターは、異なるデータ型に項目を変換するのに使用されます。
情報 | 説明 |
|---|---|
ブール値反転 | 有効高 (1) から有効低 (0) にデジタル信号を反転させます。 |
固定小数点 |
|
フィールドバスの定義
項目はデジタル信号です。コトンローラの参照セクションでの説明どおり、信号などになります。
締め付け OK などの情報の信号ビット。
イベントコードなどの情報の数ビット。
項目は、コンバーター値、識別番号、締め付け結果を表す情報の数ビットになります。
項目は文字による文字列で指定できます。
情報 | 説明 |
|---|---|
フィールドバス項目 | ブール値: 信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
整数: データは配列のデータの 1 ビット以上を占めます。 | |
文字または文字列: 信号は、英数字の文字による文字列で、1 バイト以上の位置を占めることができます。 |
情報 | 説明 |
|---|---|
フィールドバスマップ | データの配列。サイズはバイトの偶数で指定してください。フィールドバスマップは、フィールドバスメニューのフィールドバスウィンドウで作成されます。フィールドバス項目はフィールドバスマップに配置され、マスターと下位間の通信用の一意な配列を作成します。項目は、開始位置と長さをビット数で表して定義することによって配列に配置されます。 |
プロセスデータフレーム | データの配列。サイズは偶数のバイトで指定してください。プロセスデータフレームは、フィールドバスメニューのフィールドバス ウィンドウで作成されます。フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに配置されます。フレーム内のマップの位置は、オフセットで定義され、フレームの最初から計算されます。 |
フィールドバス構成 | フィールドバスマッピング構成は、フィールドバス メニューのフィールドバス ウィンドウで行われます。構成パラメータは一般的なパラメータとタイプ特有のパラメータの両方で構成されます。 パラメータ入力ボックスのリストは、フィールドバスタイプが選択されてから表示されます。 |
情報 | 説明 |
|---|---|
オフセット | ポインター変数。信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
開始バイト | ポインター変数。項目の LSB を含むフィールドバスマップ内のバイトを指します。 |
開始ビット | ポインター変数。項目の LSB を含むフィールドバスマップ内の以前に定義されたバイトのビットを指します。 |
項目の長さ | ビット数で表すサイズ変数。 |
LSB | 最下位のビットまたはバイト。 |
名前 | 説明 |
|---|---|
フィールドバスの送信 | ネットワーク上で送信されるデータグラム。送信ノードは、アドレス情報を含むフレームの見出しを、ネットワークに送信されるプロセスデータフレームに組み合わせます。受信ノードは、フレームの見出しでそのアドレスを検出し、プロセスデータフレームを取得します。 |
フレームヘッダー | ネットワークでエラーのない送信を行うためのネットワークアドレス情報とその他のデータ |
フィールドバスマスター | 通常、フィールドバスの下位への通信を開始する PLC です。マスターはデータフレームを送信し、下位から別のフレームを受信します。 |
フィールドバスの下位 | フィールドバスマスターから送信に応答するリモートノード。下位が送信を検出すると、フレームを受信し、送信元への返信で別のフレームを送信して応答します。 |
フィールドバスのデータ型
各フィールドバスには、バスを介して転送できるデータ量に関する独自の容量があります。
周期データ: 周期データ(「暗黙的」または「重要」データとも呼ばれる)は、通常、 開始、 停止、 OK、 NG 信号などのPLCデータ/プロセスデータです。周期的なデータ転送は、マスターとコントローラのフィールドバス間で定期的に(たとえば、100ms)発生します。動作に重要なコマンドが含まれているため、できるだけ頻繁に更新する必要があります。
非周期データ: 非周期的データ(「情報」とも呼ばれます)は通常、締め付けデータです。非周期データは周期データフィールドバスマッピング外にあり、非周期データ転送はマスターからコントローラフィールドバスへの要求時にのみ行われます。
非同期データ:非同期データは、周期データ転送の一部であり、マッピングの一部である締め付けデータであり、非周期データ(CC Link)をサポートしないフィールドバスタイプ用データです。非同期データ機能を使用すると、パッケージ内の周期データを含む締め付け結果をフィールドバス経由でPLCに送信することができます。次に、PLC はすべてのパッケージを 1 つの締め付け結果にマージします。コントローラからの非同期データはPFからのフィールドバスAsyncData I/O信号と通信し、非同期データはPFへのフィールドバスAsyncData I/O信号と共にコントローラに伝達されます。これらの信号は、非周期データで行われるのと同じタイプのハンドシェイクである、非同期データハンドシェイクに使用されます。PFからのフィールドバスAsyncDataのサイズは、インスタンスサイズまたはレコードサイズと見なすことが可能です。各非同期データハンドシェイク要求ごとに転送されるデータのバイト数を示します。
たとえば、非周期データの合計構成が1024バイトで、 PFへのフィールドバスAsyncDataが64バイトに設定されている場合、非同期データの合計は、毎回16回 X 64バイト送信されます。つまり、PLCからの要求ごとに、コントローラは合計非同期データから得られた次の64バイトのデータをPFへのフィールドバスAsyncDataに書き込みます。
理論的には、 PFからのフィールドバスAsyncDataを2バイト長として定義すると、最大32Kバイトのデータを送信できます(16Kデータ要求が必要となります)。
関連情報
フィールドバスサイズ
項目 | DeviceNet M30a | DeviceNet M40b | イーサネット/IP M30 | イーサネット/IP M40 | Profinet I/O M30 | Profinet I/O M40c | Profibus DP-V1 M30d | Profibus DP-V1 M40 | CC Link M30 | CCLink M40 | CCLink IE M40 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
a この列の値は StepSync と Flex にのみ適用されます。 b この列の値は Power Focus 8 にのみ適用されます。 c 括弧内の値は、PF6 FlexSystem を Profinet I/O M40 で使用する場合にのみ適用されます。 d Profibus DP-V1 のみ: 締め付けをトリガーする頻度に応じて、非周期データの転送速度は約 1 kB/s になります。これは、転送できる非周期データ量のボトルネックとなります。たとえば、3 秒ごとに締め付けを実行する場合は、締め付け当たり 3kB を超える転送を試みるべきではありません。 | ||||||||||||
最大周期データ (読み取り + 書き込み) | 512 | 1024 | 512 | 512*/2896** | 512 | (508)*/2852 | 368 | 488 | 512 | 736 | 512*/2840** | |
最小周期データ(読み取り+書き込み) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
最大周期データ (書き込み) | 256 | 512 | 256 | 256*/1448** | 256 | (254)*/1426** | 244 | 244 | 256 | 368 | 256*/1420** | |
最小周期データ(書き込み) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
最大周期データ (読み取り) | 256 | 512 | 256 | 256*/1448** | 256 | (254)*/1426** | 244 | 244 | 256 | 368 | 256*/1420** | |
最小周期データ(読み取り) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
最大非周期データ (読み取り + 書き込み) | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 該当なし | 該当なし | 65535 | |
最小非周期データ(読み取り+書き込み) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 該当なし | 該当なし | 65535 | |
最大非周期データ (書き込み) | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 該当なし | 該当なし | 65535 | |
最小非周期データ(書き込み) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 該当なし | 該当なし | 0 | |
最大非周期データ (読み取り) | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 65535 | 該当なし | 該当なし | 65535 | |
最小非周期データ(読み取り) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 該当なし | 該当なし | 0 | |
* PF6 FlexSystem の最大値
** PF8 StepSync の最大値
CC Link バージョン 1
使用中のステーション | ビットポイント(ビット) | ワードポイント (ワード) | 合計(ビット + ワード、バイト単位) |
|---|---|---|---|
1 | 32 | 4 | 12 |
2 | 64 | 8 | 24 |
3 | 96 | 12 | 36 |
4 | 128 | 16 | 48 |
CC Link バージョン 2
使用中のステーション | 1 延長サイクル | 2 延長サイクル | 4 延長サイクル | 8 延長サイクル | ||||
ポイント | 合計 | ポイント | 合計 | ポイント | 合計 | ポイント | ポイント | |
1 | 32 ビット | 12 バイト | 32 ビット | 20 バイト | 64 ビット | 40 バイト | 128 ビット | 80 バイト |
4 ワード | 8 ワード | 16 ワード | 32 ワード | |||||
2 | 64 ビット | 24 バイト | 96 ビット | 44 バイト | 192 ビット | 88 バイト | 384 ビット | 176 バイト |
8 ワード | 16 ワード | 32 ワード | 64 ワード | |||||
3 | 96 ビット | 36 バイト | 160 ビット | 68 バイト | 320 ビット | 136 バイト | 640 ビット | 272 バイト |
12 ワード | 24 ワード | 48 ワード | 96 ワード | |||||
4 | 128 ビット | 48 バイト | 224 ビット | 92 バイト | 448 ビット | 184 バイト | 896 ビット | 368 バイト |
16 ワード | 32 ワード | 64 ワード | 128 ワード | |||||
概要構成タブ
フィールドバス設定
接続状態は、次のステータスメッセージを表示することがあります。
ステータス | 説明 |
|---|---|
Fieldbus_Online | フィールドバスモジュールはオンライン。コントローラーとフィールドバスマスター間の通信は有効です。 |
Fieldbus_Offline | フィールドバスモジュールはオフライン。コントローラーとフィールドバスマスター間の通信は無効です。 |
Fieldbus_NoModuleInstalled | コントローラーにフィールドバスモジュールが検出されませんでした。 |
Fieldbus_NotConfigured | フィールドバスモジュールがコントローラーに検出されましたが、モジュールは構成されていません。 |
Fieldbus_Initializing | フィールドバス状態がリセット中であるか、グローバルパラメーターが変更された結果です。定常状態が表示されるまでの一時的な状態です。 |
フィールドバス状態は次のエラーを示すこともあります。
エラーコード | 説明 | 対処 |
|---|---|---|
Fieldbus_ModuleMismatch | サポートされているモジュール。パラメーターの不一致が検出されました。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_UnsupportedModuleInstalled | サポートされていないフィールドバスモジュール。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_ConfiguredModuleNot Installed | 構成データが作成されました。モジュールが検出されませんでした。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_Unexpectedconfigurationerror | コントローラーと ToolsTalk 2 間の不一致。 | エラーログを読むにはアトラスコプコに連絡してください。 |
フレームサイズやフィールドバスモジュールアドレスなどの一部のグローバルパラメーターを変更すると、フィールドバスモジュールがリセットされます。
プラント構造ワークスペース
でコントローラーを選択します。メニューバーの フィールドバスと SoftPLC
を選択し、概要サブタブを選択します。フィールドバスの設定で、ドロップダウンメニューから [フィールドバスの種類] を選択します。
送受信の両方向のフレームサイズ 全体のサイズをバイトで入力します。値は偶数の整数で指定します。
フィールドバスタイプに特定のパラメーターを入力します。
関連情報
本セクション内
フィールドバスパラメータ一般
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスタイプ | ドロップダウンメニューからフィールドバスタイプを選択します:
| 未定義 |
更新間隔 | プロセスデータフレームが送信される頻度を設定します。値はミリ秒で表されます。最小値は 100 ミリ秒です。 |
|
フィールドバスがオフラインの場合はツールをロック | 選択スイッチのオン-オフ。フィールドバスモジュールでフィールドバスマスター (PLC) との通信が切断されると、コントローラによって行われる動作を決定します。 | オフ |
結果応答確認の読み取り | 選択スイッチのオン-オフ。オンにすると設定はすべての仮想ステーションに影響します。信号の結果応答確認の読み取りは、フィールドバス構成にマッピングされる必要があります。 確認する結果なしの場合の結果は、PLC に直ちに送信されます。 確認する結果はキューに入れられ、確認されるとクリアされ、キューの次の結果が送信されます。結果がクリアされてからキューの次の結果までの時間は、一般フィールドバス設定で設定されたフィールドバスのサイクル時間によって異なります。設定が変更されるか、仮想ステーションのフィールドバスマッピングが変更されると、キューにある結果はフラッシュされ、PLC には送信されません。 | オフ |
ネットワークで設定 | 選択スイッチのオン-オフ。フィールドバスモジュール通信の構成方法を決定します。
| オフ |
選択したタスクで同期 | オフ | |
バイト順の周期データ | 周期データに使用するバイトの順序を選択します。
| ネットワークで設定 |
バイト順の非周期データ | 非周期データに使用するバイトの順序を選択します。
| モトローラ(大) |
非同期データを自動的に読み込む | 選択スイッチのオン-オフ。オンにすると、非同期データの最初で唯一のパッケージが自動的にロードされます。 この機能を有効にする場合、フィールドバスマスターは、新しいサイクルを開始する前にデータの読み取りが完了していることを確認する必要があります。 | オフ |
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
本セクション内
ハンドシェイクプロトコルなしで締め付け結果を構成する
各スピンドルの最終角度と最終トルクで非周期構成を構成します。
信号「コントローラからのフィールドバスAsyncData」(送信元コントローラタブ内)でフィールドバス構成を構成します。
フィールドバス構成と非周期構成の両方を仮想ステーションにマッピングします。
一般フィールドバス構成で、[非同期データを自動的に読み込む] = [オン]を選択します。
締め付け後、ユーザーは信号、「コントローラからのフィールドバスAsyncData」結果を得ることができます。
DeviceNet のフィールドバスパラメータ
以下の表は、DeviceNetの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノードアドレス |
|
|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 125 kbps、250 kbps、500 kbps、自動。 | 自動 |
接続モード | フィールドバスマスター (PLC) と下位コントローラ間の通信の種類を選択します。ドロップダウンメニューから選択します。
| ポーリング済み |
イーサネット/IP およびイーサネット/IP M40 のフィールドバスパラメータ
以下の表は、EtherNet/IPの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
Gateway (ゲートウェイ) | 0.0.0.0 の形式です。 |
|
ProfinetIO のフィールドバスパラメータ
以下の表は、ProfinetIOの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
デバイス名 | デバイスの名称 | |
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
Gateway (ゲートウェイ) | 0.0.0.0 の形式です。 |
|
ProfiSafe の使用 | ||
ProfiSafe アドレス | ||
ADIの最大サイズ | M40では無効です。 最大値として設定するさまざまなアプリケーションデータのインスタンスサイズから選択します。 データの整合性は、単一のADIにマップされたデータに対してのみ保証されます。つまり、送信されるデータが大きい場合、または2つのADIに分割された場合、データの整合性は保証されません。送信されたデータタイプのサイズと等しい最大ADIサイズを設定し、合計フレームサイズに正しくマッピングすると、データの整合性が保証されます。 周期データの送信に使用する最大データサイズ。フィールドバスマスターで使用されるデータサイズと一致する必要があります。最大ADIサイズは、そのサイズ未満のADIがマップに残るようになるまで使用されます。たとえば、最大ADIサイズが8バイトに設定されている場合、8バイト未満になるまでそのサイズがマッピングに使用され、残りのデータの転送には4、2、1バイトが使用されます。 |
デバイス名のパラメータは PROFINET のフィールドバスモジュールを識別し、RFC 5890 で説明されている構文を使用します。
Profibus のフィールドバスパラメータ
以下の表は、Profibusの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
選択したタスクで同期 | 有効な場合、フィールドバスフレームはタスクの変更時に再同期されます。 | |
拡張モード | 下位互換性のある152バイトのデータモードと368バイトのデータモードのどちらかを選択します:
| |
フィールドバスノードアドレス |
|
|
ADIの最大サイズ | M40では無効です。 最大値として設定するさまざまなアプリケーションデータのインスタンスサイズから選択します。 データの整合性は、単一のADIにマップされたデータに対してのみ保証されます。つまり、送信されるデータが大きい場合、または2つのADIに分割された場合、データの整合性は保証されません。送信されたデータタイプのサイズと等しい最大ADIサイズを設定し、合計フレームサイズに正しくマッピングすると、データの整合性が保証されます。 周期データの送信に使用する最大データサイズ。フィールドバスマスターで使用されるデータサイズと一致する必要があります。最大ADIサイズは、そのサイズ未満のADIがマップに残るようになるまで使用されます。たとえば、最大ADIサイズが8バイトに設定されている場合、8バイト未満になるまでそのサイズがマッピングに使用され、残りのデータの転送には4、2、1バイトが使用されます。 |
CC リンクのフィールドバスパラメータ
以下の表は、CC Linkの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 156 キロビット/秒、625 キロビット/秒、2500 キロビット/秒、5 メガビット/秒、10 メガビット/秒。 | 156 キロビット/秒 |
フィールドバスノードアドレス | ネットワーク内の各ユニット別の固有アドレス | |
バージョン | バージョン 1: 既定では、マッピングされたプロセスデータに基づいて、必要な占有ステーション数が自動的に計算されます。 バージョン 2: CC-Linkにネットワーク設定を実装することで、CC-Linkバージョン2の実装をカスタマイズし、拡張サイクルを通じてより大きなデータサイズを使用することができます。 | |
使用中のステーション | どのバージョンが選択されているかによって異なるパラメータ設定。これは、[拡張サイクル] パラメータと組み合わせて使用します。 | |
延長サイクル | 大きなデータサイズの送信に使用されるパラメータ設定。バージョンパラメータおよび使用中ステーションパラメータと組み合わせて使用されます。 |
CC Link IEのフィールドバスパラメータ
以下の表は、 CC Link IEの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ステーション番号 | ネットワーク上の各デバイスには、一意のステーション番号を割り当てる必要があります。 | |
ネットワーク番号 | ネットワークは、アドレス指定に使用される一意のネットワーク番号を持つ複数の部分に分割できます。 |
一般フィールドバス設定の非周期データ
データインスタンスサイズの追加
フィールドバス設定では、ユーザーはデータインスタンスサイズを設定できます。これは、サイズスパンの計算に使用される一般的な値です。インスタンスは、非周期データの最初のバイトを読み取る場所を定義します。
これは、次のフィールドバスタイプでのみ可能です。
EtherNet IP
DeviceNet
Profinet IO
Profibus
CC Link IE
プラント構造
でコントローラーを選択します。 [フィールドバスと SoftPLC]タブ
に移動します。[概要]サブタブを選択します。
[データインスタンスサイズ]フィールドに値を入力します。
データインスタンスサイズの値は、インスタンスの大きさを定義します。これは、仮想ステーションを使用した非周期フィールドバスマッピングのすべてのインスタンスで一般的なものです。既定:64、最大:255(256バイト)。
CC Link のサイズスパン計算は自動的に行われます。
本セクション内
非周期フィールドバスマッピングの削除
[仮想ステーションマッピング構成]エリアで[コントローラから非周期]タブを選択します。
削除する必要があるフィールドバスマッピングのチェックボックスをオンにして、[削除]を選択します。
SoftPLC設定
サイズ
PLCのフィールドバスに割り当てられた受信および送信のサイズは、[送信先コントローラ]および[送信元コントローラ] のフィールドで設定できます。
PLCのフィールドバスが構成されていない場合、フレームサイズは受信サイズと送信サイズの両方で0と表示されます。
オフセット
フィールドバスマップ同士の順序は手動で変更でき、 フィールドバスマップ同士の間隔も制御できます。この 2 つの両方の機能は、オフセットパラメータで制御されます。この値は、プロセスデータフレーム配列のフィールドバスマップの開始位置を定義します。
本セクション内
オフセットの変更
送信先コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
送信元コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
検証は自動的に行われます。新しいオフセット値が受け付けられると、黒のテキストで表示されます。値が受け付けられない場合は、エラーメッセージが赤のテキストで表示され、違反したオフセット規則に関する情報が示されます。
開始アドレスは偶数で指定します。
仮想ステーションマッピング構成
コントローラの仮想ステーションとフィールドバスマスターは、相互にフィールドバスマップを交換して通信します。
1 つ以上のフィールドバスマップがプロセスデータフレームに組み合わされ、コントローラとフィールドバスマスター間の物理通信リンクに送信されます。
列 | 機能 |
|---|---|
チェックボックス | マッピングの選択または選択解除。 |
仮想ステーション | 仮想ステーションの名前。 |
フィールドバス構成 | フィールドバスマップ。 |
コントローラオフセット 送信先/送信元 | プロセスデータフレーム内のフィールドバスマップの開始点。 |
列 | 機能 |
|---|---|
チェックボックス | マッピングの選択または選択解除。 |
仮想ステーション | 仮想ステーションの名前。 |
非周期構成 | 非周期データマップ。 |
開始インスタンス | 非周期データの最初のインスタンス番号。デフォルト/最小インスタンス番号:2048. |
終了インスタンス | 非周期データの最後のインスタンス番号。最大インスタンス番号:65535. インスタンスの最大サイズは、フィールドバスの種類によって異なります。 |
インスタンス数 | 非周期データを送信するために必要なインスタンスの数。たとえば、 データインスタンスのサイズが64に設定されており、 開始インスタンスが2048で終了インスタンスが2060 の場合、インスタンス数は13で、非周期構成の最大サイズは832バイトになります。インスタンス数は、 開始インスタンスと終了インスタンスに基づいて自動的に生成されます。 |
バイト単位のサイズ | 選択したデータインスタンスサイズ 、 開始インスタンス 、および終了インスタンスに基づく非周期構成の最大サイズ。 |
非周期データの合計サイズは65536バイトを超えてはなりません。
仮想ステーションには、1つの非周期フィールドバス構成のみをマッピングできますが、非周期フィールドバス構成は多くの仮想ステーションにマッピングできます。
関連情報
フィールドバスマッピングの追加
プラント構造
でコントローラーを選択します。 フィールドバスと SoftPLC
に移動します。概要タブを選択します。
[送信先コントローラー]または[送信元コントローラー]を選択します。[仮想ステーションマッピング構成]フィールドで[追加]を選択して、コントローラーへの、またはコントローラーからのフィールドバスマッピングを追加します。
[フィールドバス] タブを選択し、ドロップダウンメニューから [仮想ステーション] と [フィールドバス構成] を選択します。
フィールドバス信号構成は、 フィールドバスサブタブで作成されます。
[追加]を選択します。
これで、フィールドバスのマッピングが [仮想ステーションマッピング構成]に表示されます。
非周期フィールドバスマッピングの追加
プラント構造
でコントローラーを選択します。 フィールドバスと SoftPLC
に移動します。概要タブを選択します。
[コントローラーから非周期]を選択し、 仮想ステーションのマッピング構成で[追加]を選択します。
[非周期フィールドバス] タブを選択し、ドロップダウンメニューから [仮想ステーション] と [非周期フィールドバス構成] を選択します。
非周期フィールドバス構成は、 非周期サブタブ内に作成されます。
[追加]を選択します。
フィールドバスマッピングは、[コントローラーからの非周期]タブにある[仮想ステーションマッピング構成]領域に表示されます。
フィールドバスマップは、仮想ステーションに割り当てられた順番、またはフィールドバスマップが入る最下位の入力ポイントで、プロセスデータフレームに配置されます。
本セクション内
開始および終了インスタンスの編集
フィールドバスマッピングの開始インスタンスと終了インスタンスは編集できます。
開始インスタンスと終了インスタンスは、非周期フィールドバス構成の開始位置と終了位置を定義する固定位置です。正しい範囲を入力することが重要です。
[仮想ステーションマッピング設定] フィールドで、[コントローラからの周期] タブを選択します。
必要に応じて、開始インスタンスと終了インスタンスの値を編集します。
正しい値が入力されていない場合、「フィールドバスフレームは内容に適合する必要があります」という警告が表示されます。
最小/最初の非周期データインスタンス番号
Fieldbus | 送信先コントローラのインスタンス番号 | コントローラからのインスタンス番号 |
|---|---|---|
Profinet-IO | 32767 | 2048 |
Profibus-DP | 65025 | 2048 |
イーサネット/IP | 65535 | 2048 |
DeviceNet | 65535 | 2048 |
CC リンク | サポートされていません | サポートされていません |
CC-Link IE | 65535 | 2048 |
各締め付け後、構成されたアイテムの測定値は、PLCがシステムから読み取る非周期データとして利用できます。データは、締め付けのたびに新しい値で更新されます。
サイクル完了の信号を「高」に設定すると、データを読み取る準備が整います。データは、次の締め付けが開始されるまで、つまり入力信号開始が送信されるまで有効です。
PLCは一連の GET_RECORD コマンドを発行して、すべてのデータを収集します。
仮想ステーションに割り当てられたフィールドバスマップの表示
フィールドバスマップの仮想ステーションへの割り当て方法を表示するには:
プラント構造ワークスペース
でコントローラーを選択します。 フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。
フィールドバス仮想ステーションマッピング構成メニューに、フィールドバスマップのリストと、割り当てられている仮想ステーションが表示されます。コントローラーオフセット送信先列は、フィールドバスマップが開始されるプロセスデータフレームのアドレスをポイントします。
フィールドバス構成タブ
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。[フィールドバス] サブタブを選択して、マップのリストを表示するか、新しいフィールドバスマップを作成します。
列 | 説明 |
|---|---|
| チェックボックス。 |
名称 | 名前:マップの名前を示します。名前は受信マップと送信マップで同一です。 |
送信先サイズ | 仮想ステーションに受信するマップのサイズ。値は偶数のバイト数である必要があります。 |
送信元サイズ | 仮想ステーションから送信するマップのサイズ。値は偶数のバイト数である必要があります。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
最終変更 | ToolsTalk 2 時間で表される最終変更が行われた時刻。 |
変更者 | 最後に変更した人。 |
コントローラー更新 | コントローラー時間で表したコントローラー更新。 |
コントローラー更新者 | コントローラーを更新したのが誰かを知るには。 |
本セクション内
フィールドバスマップの作成、インポート、削除
新しいフィールドバスマップの作成
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
追加を選択して新しいフィールドバス設定を作成するか、ダブルクリックして既存のフィールドバス設定を編集します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
新規タブを選択します。
構成に名前を付けます。
送信先サイズコントローラーパラメーターを入力します。これは、バイト数で示される、仮想ステーションに受信するデータフレームのサイズです。値は偶数で指定します。
送信元サイズコントローラーパラメーターを入力します。これは、バイト数で示される、仮想ステーションから送信するデータフレームのサイズです。値は偶数で指定します。
送信フレームと受信フレームはサイズが異なる場合があります。
セットアップに項目を追加して構成を続行するには、追加を選択します。
入力されたマップサイズは、プロセスデータフレームより大きくできません。
フィールドバスマップのインポート
以前にエクスポートしたフィールドバスマップをテンプレートとして再利用し、コントローラーにインポートすることができます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
[追加]を選択します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
既存のマップを再利用するには、インポート タブを選択します。
ファイルを開く コマンドボタンを選択して、ブラウザウィンドウを開きます。
ファイルを選択します。ファイルの種類は JSON ファイルである必要があります。(*.json).
[開く] を選択します。ブラウザウィンドウが閉じます。
追加を選択してファイルをインポートします。この操作によってポップアップウィンドウが閉じ、マップのリストが更新されます。
フィールドバスマップの削除
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
削除する各フィールドバスマップで、フィールドバスワークスペースの左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンリストから 削除 を選択します。
マップのリストが更新されます。
フィールドバス信号構成を作成するには
この領域では、コントローラーから、またはコントローラーへの新しいフィールドバス信号構成を作成できます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
マップの名前をダブルクリックして表示するか、 追加を選択して新しいマップを作成します。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブを選択します。
[追加]を選択します。
信号構成の作成ダイアログウィンドウが開きます。
リストで項目名を選択して、項目を選択します。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を設定します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
ドロップダウンメニューからオプションのコンバーター値を選択します。
[追加]を選択します。
追加する項目すべてにステップ 6 ~ 11 を繰り返します。
閉じるを選択して追加の操作を終了し、ダイアログウィンドウを閉じます。
項目がマップに手動で配置されない場合、ToolsTalk 2 は項目を最下位位置に配置しようとします。後でマップ内で項目を移動することができます。
本セクション内
フィールドバス構成パラメータ
最下位ビットの位置を定義することで、項目はフィールドバスマップに配置されます。この位置はバイト番号とビット番号で識別されます。
情報 | 説明 |
|---|---|
開始バイト | 項目の最下位バイトがあるバイト番号。0 から、サイズマイナス1の数の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
開始ビット | 項目の最下位ビットが配置されているビット番号。前に選択された開始バイトから始まります。0 から 7 の範囲の数値。 番号は 0 から始まります。最下位のバイトまたはビットは 0 です。 |
長さ | 項目のビット数を表す数値。 |
範囲 | 情報のみ。選択した項目の最小の長さ、最大の長さ、デフォルトの長さの情報を示します。 |
コンバーター | 使用可能な信号コンバータのドロップダウンリスト。デジタル形式での項目の表示方法について、SoftPLC に要件がある場合に使用されます。 |
項目コンバーターは、異なるデータ型に項目を変換するのに使用されます。
情報 | 説明 |
|---|---|
ブール値反転 | 有効高 (1) から有効低 (0) にデジタル信号を反転させます。 |
固定小数点 |
|
非同期データ
非同期データは、締め付け結果などの非周期データをプロセスデータで送信する必要がある場合に使用されます。
PFへのフィールドバスAsyncDataおよびPFからのフィールドバスAsyncDataの信号がフィールドバスマップに追加されて仮想ステーションにマッピングされると、AsyncDataが有効になります。非周期結果構成が同じ仮想ステーションにマッピングされると、結果はAsyncDataに出力され、非同期データには出力されません。
本セクション内
非同期データでの締め付け結果
次のセクションでは、I/O 信号 PF へのフィールドバス AsyncData およびPF からのフィールドバス AsyncDataが使用されている場合における、非同期データを使用したフィールドバス マスターとコントローラ間の通信の例を示します。
締め付けが完了すると、フィールドバスマスターはサイクル完了信号を受信し、締め付け後にサイクル完了信号を受信した際に締め付け結果を取得する準備が整います。
フィールドバスマスターは、I/O信号10077- PFへのフィールドバス AsyncDataを送信し、ここでコントローラによって読み取られる結果データの最初のパッケージを要求します。
コントローラは I/O 信号 107- PFからのフィールドバスAsyncData で締め付け結果のサブパッケージで応答します。
コントローラからの締め付け結果は、フィールドバスフレームの最大サイズより大きくすることは出来ません。
フィールドバスマスターが最初のパッケージの読み取りを完了すると、コマンドPFへのフィールドバスAsyncDataがゼロに設定され、最初のサブメッセージが受信されて読み取られたことを示します。
コントローラは、 PF からのフィールドバス AsyncData という確認メッセージで応答し、新しいサブパッケージの締付け結果を再度要求できます。
フィールドバスマスターはデータフレームを読み取り、シーケンス番号が否定されている場合は要求されたサブパッケージがキューの最後であることを示します。
フィールドバスマスターが締め付け結果を要求し、キューが空の場合、コントローラは空のデータフレームで応答します。
非同期データの構成
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
マップの名前をダブルクリックして表示するか、 追加を選択して新しいマップを作成します。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブを選択します。
[追加]を選択します。
信号構成の作成ダイアログウィンドウが開きます。
送信先コントローラータブが選択されている場合PFへのフィールドバスAsyncDataを選択します。または送信元コントローラータブが接続されている場合、 PFからのフィールドバスAsyncData を選択します。
最下位のビットが配置されているバイト数を入力します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
閉じるを選択して追加の操作を終了し、ダイアログウィンドウを閉じます。
フィールドバス構成とフィールドバスマップを理解する
フィールドバス構成メニューでは、フィールドバスマップを編集できます。項目はマップ内で追加、削除、移動できます。
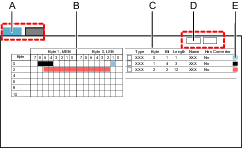
A | タブでは受信マップまたは送信マップを選択します | B | グラフィック表示で項目の配置方法を示すマップ |
C | 表で項目の配置方法を示すマップ | D | マップから項目を追加または削除するコマンドボタン |
E | 項目の配置の色分けされた例 |
リストで行が選択されると、項目がリストとマップでハイライト表示されます。
マップで項目が選択されると、リストとマップでハイライト表示されます。
項目は、単一ビットまたは複数ビットを占めることができます。項目の位置は、常に最下位ビットの開始位置で示されます。開始位置はバイトとビットで示されます。長さのパラメータは、項目の右から左への長さを示します。
項目はポップアップウィンドウで追加または編集されます。
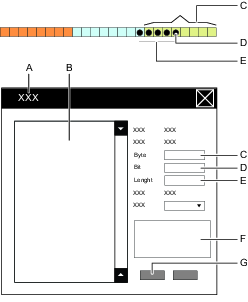
A | 項目の追加または項目の編集のポップアップウィンドウ | B | 使用できる項目のリスト |
C | バイト位置 | D | ビット位置 |
E | 項目の長さのパラメータフィールド | F | 項目情報フィールド |
G | コマンドボタン |
プロセスデータフレームにおけるフィールドバスマップの自動配置
フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに自動的に配置されます。フィールドバスと SoftPLC タブのフィールドバス仮想ステーションマッピング構成メニューでオフセット位置を編集すると、後で順序を変更できます。
次の方法が使用されます。
フィールドバスマップは、プロセスデータフレームに割り当てられた順序で配置されます。
各マップは、フレームの最初からのオフセット値で開始します。
マップは、前のマップのすぐ上、または最初のマップのオフセット 0 の、最下位の場所に配置されます。
マップがプロセスデータフレームから削除されると、ギャップができます。新しいマップが仮想ステーションに割り当てられると、配置規則がそのギャップを埋めようとします。
マップが既存のマップの間に収まらない場合、配列内の次の空き位置が試行されます。
オフセット値は、設定ウィンドウで手動で変更できます。フィールドバスマップが重ならないように気を付けてください。
ToolsTalk 2 が配置規則の違反を検出すると、エラーインジケーター がオフセットパラメーターの横に表示されます。これは、マップが重なっているか、マップが境界の外にあることを示します。オフセット値を変更して修正できます。
A | オフセット = 0 のプロセスデータフレームの最初のフィールドバスマップの開始位置 |
B | PDF の最初からのオフセットで表される、プロセスデータフレームのフィールドバスマップの開始位置 |
C | フィールドバスマップのサイズ |
D | フィールドバスマップ |
E | プロセスデータフレームのサイズ |
F | エラーの例: 青のマップが、「緑」のマップの開始位置に重なっている |
G | マップサイズ |
H | 「青」のマップの開始位置 |
J | プロセスデータフレーム |
K | オフセットアドレスが 0 の、プロセスデータフレームの最初のマップ |
フィールドバスマップでの項目の自動配置
項目はフィールドバスマップに自動的に配置されます。フィールドバスウィンドウを編集して、後で順序を変更できます。
次の方法が使用されます。
項目は、フィールドバスと SoftPLC
のフィールドバス仮想ステーションマッピング構成メニューにあるフィールドバスマップに追加された順番に配置されます。項目は、バイト、ビット、長さの位置に対して、最下位の場所に配置されます。
項目が既存の項目の間に収まらない場合は、配列内の次の空き位置に試行されます。
項目がフィールドバスマップから削除されると、ギャップができる。新しい項目が追加されると、配置アルゴリズムはその穴埋めを試行します。
ToolsTalk 2 が配置規則の違反を検出した場合。エラーインジケーター
が表示され、エラーの場所を示す。エラーインジケーターの上にマウスカーソルを合わせると、規則違反に関する詳細情報が表示されます。
フィールドバスマップの項目の編集または表示
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブのいずれかを選択します。
フィールドバス構成メニューのマップ表で項目名をダブルクリックします。
項目の編集ダイアログボックスが開きます。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を編集します。
最下位ビットのある場所のビットを入力して、項目の開始位置を編集します。
項目の長さをビット数で編集します。
オプションのコンバーター値をドロップダウンメニューから編集します。
OK を選択して変更を確認し、ダイアログウィンドウを閉じます。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップからの項目削除
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラー タブまたは送信元コントローラー タブを選択します。
マップから削除する各項目について、フィールドバス構成メニューの項目表の左端にあるチェックボックス
を選択します。削除を選択します。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップのエクスポート
フィールドバスマップは、仮想ステーションとリモートの場所の間で使用される通信フレームに信号項目を配置する方法を定義します。このマップはテンプレートとしてエクスポートでき、別のコントローラーにインポートし、再利用できます。
プラント構造ウィンドウ
でコントローラーを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、ワークスペースとマップのリストを表示します。
フィールドバス ワークスペースの左端の列で、エクスポートするフィールドバスマップのチェックボックス
をオンにし、[管理]を選択し、ドロップダウンリストから[エクスポート]を選択します。目的の場所を参照し、保存を選択します。
マップは、JSON ファイル (*.json) として保存されます。エクスポートされるファイルは、別のコントローラーにインポートできます。
非周期フィールドバス構成の使用
締め付け結果に含まれるデータの一部は、非周期データとして送信されます。IO信号 cycle_complete は、通常、非周期データをPLCプログラマーがフェッチする準備ができていることを示します。
以下のセクションでは、非周期データを構成する方法について説明します。
本セクション内
非周期データ構成の概要
非周期データ構成領域では、新しい非周期データ構成を追加することができます。一旦追加されると、異なる非周期データ構成がリストとして表示されます。
プラント構造
でコントローラーを選択します。 [フィールドバスと SoftPLC] タブを選択します。
。非周期サブタブを選択します。
列には次の情報が含まれます。
列 | 説明 |
|---|---|
名称 | 仮想ステーションマッピングで選択可能な構成の名前です。 |
チャネルの選択 | ボルトまたはチャネル。この値は、各結果構成項目の識別子がボルトであるかチャネルであるかを定義します。 |
データレイアウト | コンパクトまたは固定。 |
最終変更 | ToolsTalk 2 時間で表されます。 |
変更者 | <ユーザー> によって最後に変更された構成データ。 |
コントローラー更新 | コントローラー時間で表します。 |
コントローラー更新者 | <ユーザー> によって更新されたコントローラー。 |
本セクション内
新規非周期データ構成の追加
プラント構造
でコントローラを選択します。 [フィールドバスとSoftPLC]タブ
に移動します。非周期サブタブを選択します。
[追加]を選択し、[新規非周期データ構成の作成]ウィンドウで[新規]を選択します。
非周期データ構成名を入力して、[追加]を選択します。
新しく作成された構成の[プロパティ]サブタブが開きます。
新しい非周期データ構成が可能な限り低い位置に追加され、リストが更新されます。
本セクション内
非周期データ構成メニュー
[非周期]タブで非周期データ構成をダブルクリックして、非周期データ構成メニューを開きます。
プロパティメニュー:
パラメーター名 | 説明 |
|---|---|
名前 | 仮想ステーションマッピングで選択可能な構成の名前です。 |
マップサイズ | この値は、仮想ステーションにマッピングされるまで手動で設定します。この値により、マッピングで選択したインスタンス内に構成が確実に収まるようになります。値は、データレコードサイズに応じて、必要なインスタンス数から計算されます。 |
最初のチャンネルまたはボルトオフセット | 最初のチャンネルまたはボルトオフセットのアドレス。これは、共通領域のサイズを定義します。 |
ボルトまたはチャンネル テンプレートのサイズ | ボルトまたはチャンネルのサイズ。 |
チャンネルの選択 | ボルトまたはチャンネル。この値は、各結果構成項目の識別子がボルトであるかチャンネルであるかを定義します。 |
データレイアウト | 次から選択します:
|
ヘッダーの追加 | チェックボックスを選択して、非周期構成結果にヘッダーを追加する必要があることを示します。チェックボックスがオンになっている場合、オフセットは使用状況に応じて6バイト低くまたは高く更新されます。これもグラフィック表示されます。ヘッダーは、使用可能なスペースがある場合にのみ追加できます。共通領域に項目が追加され、ヘッダー用のスペースがない場合、ヘッダーは無効になります。 コンパクトデータレイアウトを選択した場合、非同期データペイロードの長さを知るためにヘッダーを使用することを強くお勧めします。 |
存在しない値 | 構成が、締め付け結果またはマルチステージ構成に存在しないデータを必要とする場合、異なるデータ型の存在しない値が使用されます。 新しい非周期フィールドバスが作成されると、値はコントローラにより自動的に設定されます。 |
非同期データの構成
[非同期データの構成]領域には、最大サイズ、オフセット、およびテンプレートサイズによって設定された非同期構成を視覚化したものが表示されます。すべての構成はバイトレベルです。
項目が共通領域、ボルト領域、またはチャンネル領域に追加されると、左側に表示される非周期データフレームが変化します。
オフセットとテンプレートサイズの値がゼロの場合、共通、ボルト、またはチャンネルの領域はグレー表示され、編集できません。
共通領域のデータ
共通領域には、グローバルで、同じステーション内のすべてのスピンドルに適用可能なデータが含まれています。共通領域データは、ヘッダーの後、ボルト/チャンネルデータの前に表示されます。
ボルトまたはチャンネルデータ
ボルトまたはチャンネル領域のデータは、選択したボルトまたはチャンネルに対して一意であり、ボルトまたはチャンネル領域のデータのレイアウトは、選択したデータレイアウトによって異なります。
本セクション内
共通エリアの概要
最初の占有領域には、次の項目が含まれます。
複数の締め付け結果
バッチシーケンス結果
結果の通知
これらの項目は「共通」であり、ボルトまたはチャネルに固有のものではなく、次のパラメーターが含まれます。
パラメーター名 | 説明 |
|---|---|
タイプ | 各項目の値のタイプ。例:バッチシーケンスの結果値、結果の通知、または複数の締め付け結果値。 |
オフセット | 非周期データフレームを持つバイト配列内の項目の位置。バイト単位で定義されます。 |
サイズ | バイト単位でのサイズ。データ型が文字列の場合、これを手動で構成することができます。データ型が文字列でない場合、値はデータ型に基づいて自動的に設定されます。 |
データ型 | データ型の値。例:文字列、Int8、Int16 など。 |
名前 | 項目名。編集不可。 |
関連情報
共通領域での非周期な結果構成の追加
共通エリアで追加を選択します。
[非周期結果の構成を作成]ウィンドウが開きます。
[複数の引き締め]、[結果の通知]、または[バッチシーケンス]ドロップダウンメニューからパラメーターを選択します。
出力データタイプを選択し、オフセット値を入力し、選択した出力データタイプが文字列の場合はサイズを入力します。
[追加] を選択し、[閉じる] を選択します。
共通領域での非周期な結果構成の削除
[共通] 領域で、削除する必要のある構成のチェックボックスを選択します。
削除を選択します。
ボルトまたはチャンネルエリアの概要
ボルトまたはチャネルの構成領域では、ボルトまたはチャネルに対して次のタイプの非周期データ項目を構成できます。
マルチステージ締め付け
プログラムモニター
プログラムの制限
ステップモニター
ステップ制限
パラメーター名 | 説明 |
|---|---|
タイプ | 各項目の値のタイプ。例:マルチステージの締め付け、プログラムモニター、プログラム制限、ステップモニターまたはステップ制限。 |
オフセット | 非周期データフレーム内の項目位置。バイト単位で定義されます。 |
サイズ | バイト単位でのサイズ。データ型が文字列の場合、これを手動で構成することができます。データ型が文字列でない場合、値はデータ型に基づいて自動的に設定されます。 |
データ型 | データ型の値。例:文字列、Int8、Int16 など。 |
名前 | 項目名。編集不可。 |
識別子 | 選択したボルトまたはチャンネルのIDを設定します。 |
関連情報
ボルトまたはチャンネル領域での非周期な結果構成の追加
ボルトまたはチャンネル領域で追加を選択します。
[非周期結果の構成を作成]ウィンドウが開きます。
マルチステップの締め付け、プログラムモニター、プログラム制限、ステップモニター、またはステップ制限ドロップダウンメニューからパラメーターを選択します。
出力データタイプを選択し、オフセット値、識別子を入力し、選択した出力データタイプが文字列の場合はサイズを入力します。
ステップモニター と ステップ制限では、 ステップカテゴリ を選択し、 ソフトスタート、 ランダウン、 開始 、 最終のいずれかを選択します。
ステップ番号の代わりに、表示するステップカテゴリの結果を指定します。
同じステップカテゴリのステップが複数ある場合は、[ステップカテゴリの選択]ドロップダウンメニューで、 最後に実行されたステップまたはプログラムで最後のステップ(順序番号の大きいステップ)を表示するように選択できます。
[追加]、[閉じる]の順に選択します。
ボルトまたはチャンネル領域でコピーを作成する
ボルトまたはチャンネル領域の[コピーの作成]タブを使用して、一度に多数のボルトまたはチャンネルを追加することができます。
コピーする必要があるIDのチェックボックスを選択し、[コピーの作成]を選択します。
ボルトまたはチャンネルのコピーを作成ウィンドウが開きます。
[コピー数]フィールドにコピー数を入力します。
コピー用のスペースがない場合は、「コピー量は現在の構成内の残りのスペースに収まりません」という警告が表示されます。
[コピーを作成]を選択し、[閉じる]を選択します。
連続した識別子番号を持つコピーのリストが表示されるようになります。コピーされたIDの値は、常に既存の最大数に続く数となります。たとえば、IDの2、5、6がすでに存在し、値が2のIDがコピーされた場合、新しいIDの値は7となります。値の変更にはパラメータをダブルクリックします。
bnボルトまたはチャネル領域からの非周期的な結果設定の削除
IDのチェックボックスをオンにして、そのIDの下のすべての構成を削除します。または、構成を個別に削除するには、ボルトまたはチャネル領域でその構成の横にあるチェックボックスをオンにします。
削除を選択します。
締め付け結果の例
このフィールドバスマップでは、締め付け結果データはレコード番号2048から始まり、各レコードは64バイトです。ヘッダーを含む締め付けデータの最大サイズは、最大64チャンネルに適合するために646バイトとなります。
データ | データ型 | フレーム内の位置 | バイト | |
|---|---|---|---|---|
a データ部分の長さ、およびヘッダーからのシーケンスと長さ。つまりデータの長さ + 4バイト | ||||
ステータス | 整数 | ヘッダー | 0-1 | |
シーケンス | 整数 | ヘッダー | 2-3 | |
データ長a | 整数 | ヘッダー | 4-5 | |
ボルト番号チャンネル 1 | 整数 | データ | 6-7 | |
最終トルクチャンネル 1 | 実測 | データ | 8-11 | |
最終角度チャンネル 1 | 実測 | データ | 12-15 | |
ボルト番号チャンネル 2 | 整数 | データ | 16-17 | |
最終トルクチャンネル 2 | 実測 | データ | 18-21 | |
最終角度チャンネル 2 ....................................... | 実測 | データ | 22-25 | |
ボルト番号チャンネル 64 | 整数 | データ | 636-637 | |
最終トルクチャンネル 64 | 実測 | データ | 638-641 | |
最終角度チャンネル 64 | 実測 | データ | 642-654 | |
ヘッダーフィールドの機能
信号 | データ型 | 説明 |
|---|---|---|
ステータス | 整数 | 将来の使用のために追加されました。現時点では常に0x8100です。 |
シーケンス | 整数 | 常に-1になります |
データ長 | 整数 | データの長さ、およびヘッダーからのシーケンスと長さ。つまりデータの長さ + 4バイト |
データフィールドの機能
信号 | データ型 | 説明 |
|---|---|---|
ボルト番号チャンネル X | 整数 | 締め付けに使用される同期モードの構成に応じたチャンネルのボルト番号。締め付けに含まれていないチャンネルの場合、ボルト番号は0に設定されます |
最終トルクチャンネル X | 実測 | チャンネルの締め付け結果から得られた最終トルク値。値は常にNmで単位で送信されます。締め付けに含まれていない、または最終トルク値を生成しなかったチャンネルの場合、0x7F820000に設定されます。 |
最終角度チャンネル X | 実測 | チャンネルの締め付け結果から得られた最終角度値。値は、常に単位 deg で送信されます。締め付けに含まれていない、または最終トルク値を生成しなかったチャンネルの場合、0x7F820000に設定されます。 |
最終トルクと最終角度の値は、ISO/IEC/IEEE60559:2011 に従って浮動小数点のバイナリ32で送信されます。データはネットワーク順に送信されます(ビッグエンディアン)。値を送信できない場合、特別な値 0x7F820000 が送信されます。浮動小数点数として解釈される場合、NaN(非数)に対応します。
整数値は符号付き16ビット整数として送信されます。つまり、有効な範囲は -32768 から 32767 です。
たとえば、チャンネル1とチャンネル3で締め付けが行われ、次の締め付けデータが作成された場合:
チャンネル 1
ボルト番号 1
最終トルク 10.23 Nm
最終角度 341.4°
チャンネル 3
ボルト番号 5
最終トルク 10.32 Nm
最終角度は生成されませんでした
締め付けデータは、インスタンス番号 2048 で次のように送信されます:
バイト | フィールド | 値 | コメント |
|---|---|---|---|
0-1 | ステータス | 0X8100 | 常に 0X8100 になります |
2-3 | シーケンス | -1 | 常に-1になります |
4-5 | 長さ | 34 | 34バイト、3つのチャンネルのデータ + 長さおよびシーケンス番号 |
6-7 | ボルト番号チャンネル 1 | 1 | |
8 - 11 | 最終トルクチャンネル 1 | 10.23 | 10.23 Nm |
12-15 | 最終角度チャンネル 1 | 341.4 | 341.4° |
16-17 | ボルト番号チャンネル 2 | 0 | 締め付けには含まれません |
18-21 | 最終トルクチャンネル 2 | 0x7F820000 | 利用可能なトルク値がありません |
22-25 | 最終角度チャンネル 2 | 0x7F820000 | 利用可能な角度値がありません |
26-27 | ボルト番号チャンネル 3 | 5 | |
28-31 | 最終トルクチャンネル 3 | 10.32 | 10.32Nm |
32-35 | 最終角度チャンネル 3 | 0x7F820000 | 利用可能な角度値がありません |
SoftPLC構成タブ
SoftPLCの概要
SoftPLC は、コントローラーの動作をカスタマイズしたり、フィールドバスデータを送受信したり、外部 SoftPLC との間で I/O 信号を交換したりするために使用されます。外部 SoftPLC は、組立ライン上の機械の制御に使用されます。構成とプログラミングは、ToolsTalk 2 と統合された MultiProg と呼ばれるサードパーティのソフトウェアを介して行われますが、独自のプロセスで実行されます。SoftPLC はフィールドバスと SoftPLC タブ にあり、ライセンスまたは機能ごとに、この機能をサポートしているコントローラーに表示されます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
関連情報
SoftPLC 信号構成の作成
アクセサリーと SoftPLC 間の操作は、I/O 信号を交換して行われます。
[SoftPLC 信号構成] フィールドで [追加] を選択すると、このコントローラーに接続されており、サポートされているすべての I/O 信号のリストが表示されます。
関係ない信号をクリアして、SoftPLC 信号構成から除外します (デフォルトではすべての信号が選択されています)。
信号構成リストに名前を付けます。
信号構成を仮想ステーションにマッピングする際、作成された信号構成が、ドロップダウンリストでの選択オプションとして使用可能になります。
信号構成に含まれていない(チェックマークがオンになっていない)信号は、引き続き SoftPLC コンフィギュレーターMultiprogに表示されますが、取り消し線が引かれています。
SoftPLC仮想ステーションマッピング構成
新規 SoftPLC マッピングの作成
SoftPLC 仮想ステーションマッピング構成 で 追加 を選択します。
新規 SoftPLC マッピングの作成 ウィンドウで、ドロップダウンメニューから必要な 仮想ステーション と SoftPLC 信号構成 を選択します。
同じ SoftPLC 信号構成を複数の仮想ステーションに使用できます。
各仮想ステーションは、1つの SoftPLC 信号構成を使用できます。仮想ステーションが特定の信号構成でマッビングされると、新規 SoftPLC マッピングを作成するときに、ドロップダウンメニューで仮想ステーションを使用できなくなります。使用可能にするには、その仮想ステーションの既存のマッピングを削除します。
SoftPLC インデックス: コントローラー上の特定の仮想ステーションを SoftPLC 環境の順序付きインデックスに接続します。たとえば、SoftPLC が仮想ステーション2を参照している場合、このマッピングは SoftPLC に現在どの仮想ステーションが現在番号2であるかを正確に通知します。
プロジェクトの仮想ステーションで更新を選択すると、SoftPLC プロジェクトの SoftPLC 信号構成または SoftPLC マッピングへに行われた変更が確認できます。ToolsTalk 2は、更新時にMultiprog SoftPLC プロジェクトの変数を削除しません。追加または変更のみが可能です。そのため、更新する前に MultiProg の仮想ステーションまたはフィールドバスのグローバル変数をクリアすることが推奨されます。
SoftPLC マッピングの削除
対応するチェックボックスをオンにして、仮想ステーション信号構成マッピングを選択します。[削除]を選択します。
新規SoftPLCプロジェクトの作成
新しいSoftPLC 信号構成を作成します。
SoftPLC 信号構成を仮想ステーションに割り当てます。
一般 SoftPLC 設定で SoftPLC ONを選択します。
[新規作成] を選択すると、新しい SoftPLC プロジェクトに対して自動的に Multiprog が開きます。
このプロジェクトは、基本的なテンプレートを使用し、このテンプレートには Multiprogで利用可能なすべての機能が含まれています。
作成され、編集されたプロジェクトは、プロジェクトが構築され、文書 > Mp Temp に保存されるとローカルディスクに継続的に保存されます。ToolsTalk 2 SoftPLC の起動時に開くを選択すると、SoftPLC プロジェクトが ToolsTalk 2 サーバーに保存されていない場合は、この保存されたデータプロジェクトがアップロードされます。
Multiprog で SoftPLC プログラムを編集し、ToolsTalk 2 でプロジェクトに名前と説明を指定します。
プロジェクトの仮想ステーションフィールドで更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
フィールドバスの SoftPLC フレームサイズフィールドで [更新] を選択して、フィールドバスデータを追加します。
フィールドバスのフレームサイズは、SoftPLC とフィールドバスデータを直接送受信できるようにする特殊な SoftPLC 入出力部分を含むように構成する必要があります。
[保存] を選択して、編集したプロジェクトを ToolsTalk 2 サーバーにチェックインします。
変更をコントローラーにプッシュします。
SoftPLC プロジェクトの削除
プロジェクトの削除
プロジェクト領域で 削除を選択します。ダイアログウィンドウで[削除]を再度選択して確定します。
SoftPLCユーザーデータの作成
統合は、SoftPLC と OpenProtocol アダプタの間で共有メモリをマッピングし、最大で 6 つの仮想ステーションがサポートされるように実装されます。仮想ステーションには、SoftPLC へのデータに 100 バイト、SoftPLC からのデータに 100 バイトが割り当てられます。合計で 600 バイトが両方向にマッピングされます。
SoftPLC は、共有メモリの専用の部分を介してプロトコルアダプターと交信できます。
一般 SoftPLC 設定フィールドで追加を選択します。
SoftPLC ユーザーデータの作成 ウィンドウのドロップダウンから関連するプロトコルを選択します。
SoftPLCへおよびSoftPLC からアドレスフィールドの開始アドレスに0を、 終了アドレスに599を入力します。
[追加]を選択します。
MultiprogソフトウェアのGlobal_Variables *セクションには、次のアドレスを持つ各仮想ステーションの出力変数(opOUT_VSX)と入力変数(opIN_VSX)が含まれます。
仮想ステーション
SoftPLC への Open Protocol ユーザーデータ
SoftPLC からの Open Protocol ユーザーデータ
仮想ステーション 1
%MB3.38400
%MB3.40448
仮想ステーション 2
%MB3.38500
%MB3.40548
仮想ステーション 3
%MB3.38600
%MB3.40648
仮想ステーション 4
%MB3.38700
%MB3.40748
仮想ステーション 5
%MB3.38800
%MB3.40848
仮想ステーション 6
%MB3.38900
%MB3.40948
上記のアドレスが設定されていないプロジェクトをインポートまたは更新する場合は、手動でMultiprogに追加する必要があります。
SoftPLC の オンまたはオフを選択します。
オン:SoftPLC プロセスが失われた場合、工具は締め付けを行わないようにロックされます。
オフ:SoftPLC プロセスが失われても、工具は締め付けを実行できます。
コントローラーでオープンプロトコル操作を実行します。
変更をコントローラーにプッシュします。
SoftPLC通信のセットアップ
オープンプロトコルクライアントにて、MID0241でユーザーデータを登録します。
コントローラは、MID0005をオープンプロトコルクライアントに送信することで、コマンドを受け入れます。
オープンプロトコルクライアントはMID0240を使用して、コントローラからユーザーデータをダウンロードします。
コントローラは、MID0005をオープンプロトコルクライアントに送信することで、コマンドを受け入れます。
コントローラはMID0242を使用して、データをオープンプロトコル クライアントに送信します。
オープンプロトコルクライアントは、MID0243でユーザーデータを受信したことを確認します。
詳細情報については、ドキュメント「OpenProtocol Appendix for PowerFocus 6000 SW1.5.docx」を参照してください。
SoftPLC プロジェクトテンプレートのインポート
新しい SoftPLC プロジェクトは既存のプロジェクトテンプレートから作成できます。テンプレートは、さらに調整が可能な基本的な提示として使用できます。選択したプロジェクトテンプレートは、元のプロジェクトを上書きしないように、コピーされます。
プロジェクトのインポートを選択して、既存の SoftPLC プロジェクトを選択します。
Multiprogで SoftPLC プロジェクトを編集します。
プロジェクトの仮想ステーションで更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
フィールドバスの SoftPLC フレームサイズで [更新] を選択して、フィールドバスデータを追加します。
[保存] を選択して、編集したプロジェクトを ToolsTalk 2 サーバーにチェックインします。
変更をコントローラーにプッシュします。
プロジェクト内にまだ含まれていない場合、[プロジェクトの仮想ステーション] で [更新] を選択すると、SoftPLC 仮想ステーションのマッピングが SoftPLC プロジェクトに追加または更新されます。
コントローラー フィールドバス
ToolsTalk 2 バージョン 2.24 では、 コントローラーフィールドバスが導入されました。これはフィールドバスと 1 つの点で異なります。コントローラーフィールドバスはコントローラー全体での使用を目的としており、コントローラー内のすべての仮想ステーションによって共有されます。コントローラーフィールドバスを使用すると、多くの仮想ステーションが同じ受信信号を使用できます。これにより、フィールドバスと比較すると、必要な帯域幅の量が削減されます。
コントローラーフィールドバスには、仮想フィールドバスを使用した信号マッピング機能が組み込まれています。仮想フィールドバスの目的は、個々の信号構成を信号構成の論理グループにマッピングすることです。仮想フィールドバスは、仮想ステーションを信号構成にマッピングするポイントを提供します。信号構成を多数の仮想フィールドバスにマッピングできるため、仮想ステーションが同じ信号構成を共有できます。
本セクション内
コントローラーフィールドバスを使用するための前提条件
コントローラーフィールドバスを使用するには、以下の前提条件を満たす必要があります:
ToolsTalk 2 バージョン 2.24 以降
コントローラーソフトウェアバージョン 3.13 以降
コントローラーフィールドバス構成の作成
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。[追加]を選択します。
新しいフィールドバス構成の作成 ウィンドウが表示されます。
新しいコントローラーフィールドバス構成の名前を入力します。
送信先サイズコントローラー番号を入力します。これは、バイト数で示される、仮想ステーションに受信するデータフレームのサイズです。値は偶数で指定します。
送信元サイズコントローラー番号を入力します。これは、仮想ステーションから送信されるデータフレームのサイズで、バイト数で表示されます。値は偶数で指定します。
[追加]を選択します。
新しいコントローラーフィールドバス構成が作成され、表示されます。
コントローラーフィールドバスで信号構成を作成する
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。コントローラーフィールドバス インスタンスを選択します。
コントローラーフィールドバスに信号構成を追加するには、追加...を選択します。
信号構成の作成 ウィンドウが表示されます。
信号を選択します。
信号構成のバイト、ビット、および長さのデータを入力します。
[追加]を選択します。
[閉じる]を選択します。
信号構成が作成されました。
このステップでは、信号構成の横に赤い感嘆符が表示されます。これは、信号構成が仮想フィールドバスにまだマッピングされていないためです。
仮想フィールドバスの作成
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。仮想フィールドバスを追加するフィールドバス構成をダブルクリックします。
コントローラーフィールドバスに仮想フィールドバスを追加するには、仮想フィールドバス セクションの追加... を選択します。
仮想フィールドバスの作成 ウィンドウが表示されます。
名前を入力し、物理キーボードで [Tab] キーを選択します。
[追加]を選択します。
[閉じる]を選択します。
仮想フィールドバスが作成されます。
このステップでは、仮想フィールドバスの横に赤い感嘆符が表示されます。これは、信号構成が仮想フィールドバスにまだマッピングされていないためです。
信号構成を 1 つ以上の仮想フィールドバスにマッピングする
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、コントローラー フィールドバスサブタブを選択します。信号構成のマッピング先となるフィールドバス構成をダブルクリックします。
コントローラーフィールドバスビューで、データフレーム内の信号構成を見つけます。信号構成を右クリックし、[仮想フィールドバスへのマッピング] を選択します。
仮想フィールドバスに信号をマッピング ウィンドウが表示されます。
信号構成をマッピングする仮想フィールドバスを選択します。
[マップ] を選択します。
信号構成は 1 つ以上の仮想フィールドバスにマッピングされます。
[閉じる]を選択します。
コントローラーフィールドバスビューで仮想フィールドバスを選択すると、仮想フィールドバスに接続されている信号構成が表示されます。信号構成は緑色で表示されます。
仮想ステーションを仮想フィールドバスにマッピング
フィールドバスのサイズが、使用するコントローラー フィールドバスを収容するのに十分な大きさであることを確認してください。これらの設定は [サイズ] セクションで構成します。
仮想ステーションを仮想フィールドバスにマッピングするには、仮想ステーションのマッピングモードを多数対 1 に設定する必要があります。
仮想ステーションのマッピングモードを変更すると、既存の仮想ステーションのマッピング構成が削除されます。削除されたマッピングは復元できません。
プラント構造
作業スペースでコントローラーを選択します。フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。仮想ステーションマッピング構成セクションで 、コントローラーフィールドバス構成を選択します。
コントローラーへのオフセットとコントローラーからのオフセットを入力してフィールドバス配分を計画します。
オフセットはフィールドバス分布セクションにグラフィカルに表示されます。
マッピングセクションで、追加...を選択します。
仮想ステーションを選択します。
仮想フィールドバスを選択します。
[追加]を選択します。
[閉じる]を選択します。
フィールドバスマッピングは、概要サブタブと仮想ステーションタブの両方に表示されます。仮想ステーションタブを選択し、フィールドバスマッピングセクションのマッピングを確認します。
構成変更プッシュ配信の使用
ToolsTalk 2 には、ToolsTalk 2サーバーに接続されている各コントローラのミラーリングされたデータがあります。コントローラまたは Web インターフェースでの最初の接続時、再接続時、または構成時に、データはコントローラから ToolsTalk 2 に自動的にコピーされます。
データは、ToolsTalk 2からコントローラへ自動的に送信されません。変更を適用するには、オペレーターがデータをコントローラにプッシュする必要があります。
オフラインのコントローラは、ToolsTalk 2 アプリケーションによって構成設定またはパラメータ値が変更でき、データは保存され、後でプッシュできます。
ToolsTalk 2 で構成設定が変更されると、構造リストのコントローラ名の横と、変更されている締め付けプログラムの横にプッシュインジケーター が表示されます。
コントローラがオンラインかオフラインかに関係なく、構成は ToolsTalk 2 インターフェースで作成できます。
構成は、オンライン状態のコントローラのみにプッシュできます。コントローラがオフラインの場合、コマンドは無視されます。
プッシュは複数のコントローラに同時に行うことができます。
プッシュコマンドが正しく実行されると同時に、インジケーター
が消えます。
本セクション内
コントローラへの構成のプッシュ
構成を 1 つ以上のコントローラにプッシュするには:
変更をコントローラにプッシュ配信する方法はいくつかあります。
コントローラーリストのコントローラー名の横にあるプッシュ配信インジケーターアイコン
を選択します。
タブメニューの 管理 ボタンを選択し、ドロップダウンリストから 変更のプッシュ配信を選択します。
上部の情報バーの 変更のプッシュ配信ボタンを選択します。
選択すると、プッシュ配信するコントローラ ダイアログウィンドウが表示されます。
次のような、構成をプッシュする方法があります:
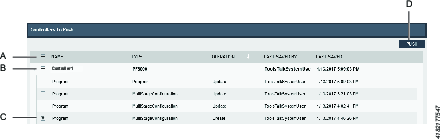
A
すべての設定を一度にプッシュするには、このチェックボックスをオンにします。これは、リストの全コントローラに適用されます。
B
選択したコントローラのすべての構成がプッシュされます。該当するチェックボックスにマークを付けてコントローラを選択します。
C
コントローラの構成リストを展開して、プッシュする構成を手動で選択します。残りの構成は、選択した構成のプッシュ後リストに残ります。
プッシュコマンドボタン(D)を選択します。
[キャンセル]を選択するか、ウィンドウを閉じて終了します。
コントローラ構成を元に戻す
ToolsTalk 2 アプリケーションへの変更は、自動的に保存されます。プッシュ記号 は、コントローラに変更が加えられているが、まだプッシュされていないことを示します。
[管理] ボタンを選択し、続いてドロップダウンメニューから [元に戻す] を選択します。
[コントローラを元に戻す]警告 ダイアログで、[OK] を選択してコントローラ設定を元に戻すか、または [キャンセル] を選択して元に戻すプロセスをキャンセルします。
元に戻す操作では、選択したコントローラの ToolsTalk 2 に保存されているすべての構成が削除されます。また、選択したコントローラのブロックも削除します。コントローラまたは Web インターフェースで行った変更は、通常通りデータベースにコピーされます。
[ライブラリ]タブでの作業
ライブラリタブ は、グローバル機能と共に左側のメニューバーにあり、次の機能を提供します。
ライブラリ | 機能 |
|---|---|
 | 締め付けプログラムのライブラリ ライブラリには、登録するコントローラーに使用可能なすべてのグローバル締め付けプログラムが含まれます。グローバル締め付けプログラムは、あるコントローラーからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラーに配信することができます。 |
| Sync Mode ライブラリ Sync Modeライブラリは、Sync Mode構成を作成および変更し、それを複数のコントローラーに配信するのに使用できるSync Modeテンプレートを含みます。 |
 | 構成ライブラリ このライブラリには、登録するコントローラーに使用可能なすべてのグローバル構成が含まれます。構成は、あるコントローラーからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラーに配信することができます。 |
 | フィールドバス構成ライブラリ このライブラリには、登録するコントローラーに使用可能なすべてのグローバルフィールドバス構成が含まれます。フィールドバス構成は、あるコントローラーからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラーに配信することができます。 |
| 設定ライブラリ 他のコントローラーに配布できるイベント構成用のライブラリ。イベントは、ここまたは 設定 |
| プログラムテンプレートライブラリ マルチステップ締め付けプログラムのテンプレートを作成します。新しいマルチステッププログラムを作成する際、テンプレートは挿入 (ドラッグアンドドロップ) でき、マルチステッププログラムを構築する基盤となります。 |
 | コントローラー構成ライブラリ コントローラー構成ライブラリは、コントローラー構成を作成および変更し、それを複数のコントローラーに配信するのに使用できるコントローラーテンプレートを含みます。ライブラリは、ToolsTalk 2 サーバーにアクセスすることなくステーションセットアップモードで構成をコピーし、展開するのにも非常に便利です。 |
コマンド | 説明 |
|---|---|
追加 | 新しい締め付けプログラムを作成します。 |
管理 |
|
本セクション内
ライブラリ - 配信リスト
配信リストは、登録リストと同様に機能します。グローバル構成のいずれかに変更を行う度に、変更はすべての登録先に反映されます。配信リストは登録を管理します。
左側のメニューバーでライブラリ
を選択します。 配布を表示するには、ライブラリアイコンの1つを選択します:
選択したライブラリで 1 つ以上のチェックボックスを選択して、配信リストの内容を表示します。
配信リストは、現在選択している構成に登録しているすべてのコントローラを示します。
締め付けプログラムのライブラリ
締め付けプログラムのライブラリのはじめに
締め付け戦略の選択とパラメータ値の組み合わせで締め付けプログラムが形成され、これが締め付けプログラムの名前となります。締め付けプログラムはローカルかグローバルのどちらかになります。
ローカル締め付けプログラムは単一のコントローラに有効で、グローバル締め付けプログラムでは同じ締め付けプログラムに複数のコントローラが登録できます。
コントローラはグローバル締め付けプログラムに登録できます。プログラムが変更されると、変更は、プログラムに登録している ToolsTalk 2 のすべてのコントローラに反映されます。
締め付けプログラムライブラリは、グローバル締め付けプログラムと特定の締め付けプログラムに登録しているコントローラを管理します。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、ライン構造ワークスペースにプッシュインジケーター が表示されます。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。
関連情報
締め付けプログラムのライブラリワークスペース
左側のメニューバーでライブラリ
を選択します。 締め付けプログラムライブラリ
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
列 | 説明 |
|---|---|
チェックボックス | 構成を選択します。 |
タイトル | 構成の名前を示します。プッシュインジケーター |
戦略 | 構成に選択されている締め付け戦略。 |
グローバル | 列にはいが表示される場合は、これがグローバル締め付けプログラムであることを示します。 |
目標 | 最終目標は、トルク値または角度値で表されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル締め付けプログラムライブラリをサポートできるコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 締め付けプログラムのコントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル締め付けプログラムチェックボックスを選択して配信リストを表示します。配信リストは、選択したプログラムに現在登録しているすべてのコントローラを示します。
グローバル締め付けプログラムがない場合は、ワークスペースエリアは空白です。追加を選択して新しい締め付けプログラムを作成するか、既存のプログラムをダブルクリックしてパラメータを表示または編集します。
締め付けプログラムライブラリ - グローバル締め付けプログラムの追加
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
追加を選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
以下の表に記載のパラメータを入力します。
ダイアログウィンドウで追加を選択します。ウィンドウが閉じられ、ワークスペースに締め付けプログラムのメニューが表示されます。
パラメータ | 説明 |
|---|---|
コントローラータイプ | ショートカットメニューからコントローラのタイプを選択します。 |
コントローラのソフトウェア バージョン | ショートカットメニューからコントローラソフトウェアのバージョンを選択します。 |
名前 | パラメータ入力フィールドで、グローバル締め付けプログラムに名前を指定します。 |
戦略 | ショートカットメニューから締め付け戦略を選択します。 |
ターゲット | ショートカットメニューから目標タイプを選択します。 |
目標値 | パラメータ入力フィールドの最終ステップの目標値を数値で入力します。 |
締め付けプログラムライブラリ - グローバル締め付けプログラムの削除
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
削除する各締め付けプログラムの、左端の列のチェックボックス
を選択します。管理を選択し、続いて削除を選択します。
グローバル締め付けプログラムが、ライブラリから削除され、リストが更新されます。
削除したプログラムに登録しているコントローラは、プログラムを失いません。削除された締め付けプログラムは、締め付けプログラムライブラリワークスペースのリストから削除されます。締め付けプログラムは、グローバル締め付けプログラムに登録されているコントローラの締め付けワークスペースのリストには残ります。目に見える変化は、締め付けプログラムがグローバル締め付けプログラムからローカル締め付けプログラムに変換されることです。(ライブラリリンク列の入力はクリアされます)。
締め付けプログラムライブラリ - グローバル締め付けプログラムの配信
締め付けプログラムライブラリ - 配信と更新
グローバル締め付けプログラムの配信リストは、登録リストと同様です。グローバル締め付けプログラムに変更を行うと、変更はすべての登録先に反映されます。配布リストは登録を管理します。
配信
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
グローバル締め付けプログラムライブラリで 1 つ以上のチェックボックスを選択して、配信リストの内容を表示します。
配信リストは、選択している締め付けプログラムに登録しているすべてのコントローラーを示します。
更新
配信されたプログラムが変更されると、その変更は承認されたプログラムを除いたプラント構造に自動的に配信されます。
承認されたプログラムを変更するには、下書き状態に設定する必要があります。下書きに設定されたプログラムで行われた変更はライブラリに保存されますが、プラント構造では更新されません。この変更は、プログラムが承認された時点でプラント構造に反映されます。
締め付けプログラムライブラリ - グローバルプログラムの配信リストへの追加
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
チェックボックス
を使用して、配信リストに追加するプログラムを選択します。管理を選択し、続いて配信を選択します。
グローバル構成の配信ダイアログウィンドウが開きます。
左側の列に選択したグローバル締め付けプログラムが示されます。
右側の列は選択したプログラムに対応し、配信リストに追加できるコントローラのリストを示します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
チェックボックス
を使用して、右側の列でコントローラを選択します。コントローラが選択したグローバル締め付けプログラムにすでに登録している場合、右側の列には表示されません。
オプションのステップ: 下向きの矢印
を選択して追加の構成を開きます。オプションのステップ: グローバル締め付けプログラムがコントローラの GUI または Web GUI で変更される場合にToolsTalk 2で行われる操作を選択します。
追加を選択します。
ダイアログウィンドウが閉じます。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。この操作は、締め付けプログラムライブラリのグローバル締め付けプログラムの配信で定義されています。
締め付けプログラムライブラリ - グローバルプログラム登録の配信リストからの削除
グローバル締め付けプログラムの配信リストは、登録リストと同様です。グローバル締め付けプログラムに変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバル締め付けプログラムのチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択したプログラムに登録しているすべてのコントローラを示します。
プラント構造ワークスペース
でコントローラを選択します。締め付けプログラム
に移動します。締め付けプログラムのワークスペースに、締め付けプログラムのリストが表示されます。
選択された締め付けプログラムには、ライブラリのリンク列のエントリにはいが示されます。
選択した締め付けプログラムのチェックボックス
を選択します。リンク解除を選択します。
選択された締め付けプログラムのライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 締め付けプログラムライブラリ
に移動します。削除された締め付けプログラムのチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
締め付けプログラムライブラリ - グローバル締め付けプログラムの更新
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
名前フィールドをダブルクリックして、締め付けメニューを編集可能にします。変更は締め付けプログラムに自動的に保存されます。
グローバル締め付けプログラムは、締め付けメニューがライブラリパスを介して開く場合にのみ、編集または更新できます。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
関連情報
締め付けプログラムライブラリ - ローカル締め付けプログラムからグローバルプログラムへの変換
1 つのコントローラで開発されているローカル締め付けプログラムをグローバル締め付けプログラムに変換できます。この締め付けプログラムは、選択したコントローラに配信できます。
プラント構造
からコントローラを選択し、締め付けプログラムを選択します。締め付けプログラムライブラリに追加するプログラムのチェックボックスをオンにします。
ドロップダウンリストから 管理、続いてライブラリに追加を選択します。グローバル構成の作成ダイアログウィンドウが開きます。
作成を選択します。締付けプログラムライブラリのリストにプログラムが追加されます
。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。
締付けプログラム ライブラリ - コピーと貼り付け
締付プログラムはコピーして貼り付けることができます。
PF8、PF6000、STRW、PFXC、IXB、および ToolsControl はハンドヘルドと見なされます。
PF6 FlexSystem、PF8 同期締め付け、PF6000 同期締め付けは固定とみなされます。
以下のルールが適用されます:
固定ファミリーのプログラムは、3.8 以降のコントローラーバージョンから来た、固定ファミリーの一部のコントローラータイプにのみ貼り付けることができます。
PF6000 プログラムは、PF6000、PF8、および ToolsControl にのみ貼り付けることができます。
PF8 プログラムは PF8 と ToolsControl にのみ貼り付けることができます。
コントローラー タイプ STRW、PFXC、IXB、および ToolsControl のプログラムは、同じコントローラータイプにのみ貼り付けることができます。
締め付けプログラムをコピーしたものには、付属する、または関連するプログラムのリンクなどすべてのものが常に含まれます。
例:
緩めプログラムが付属する締め付けプログラムをコピーしたもの > 貼り付けると、緩めプログラムが付属する締め付けプログラムが作成されます。
コピーと貼り付け
[ライブラリ] を選択します。
締め付けプログラムを選択します。作業スペース領域には利用可能なプログラムまたはシーケンスがすべて表示されます。
1 つの行を右クリックするか、複数の行のチェックボックスを選択し、右クリックして [コピー] を選択します。
コピーしたものをライブラリに貼り付けるには、空の作業スペース領域の任意の場所を右クリックして [貼り付け] を選択します。コピーしたものが、既存のリストで最初に使用可能な位置に追加されます。
リストにコピー用のスペースがない場合は、操作全体が失敗します。
グローバル構成ライブラリ
構成ライブラリのはじめに
構成はローカルかグローバルのどちらかになります。
ローカル構成は、単一のコントローラに有効で、グローバル構成は複数の選択されたコントローラに有効です。
コントローラはグローバル構成に登録できます。構成が変更されると、変更は、構成に登録している ToolsTalk 2 のすべてのコントローラに反映されます。
グローバル構成ライブラリは、グローバル構成と構成に登録しているコントローラを管理します。
ToolsTalk 2 ではローカルとグローバルの構成を区別できます。コントローラ自体は、ローカルとグローバルの構成を区別しません。そのため、デバイスの構成がコントローラ GUI または Web GUI のいずれかから変更される場合は、ToolsTalk 2 で操作を指定することが重要です。
関連情報
グローバル構成ワークスペース
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
 に移動します。
に移動します。ワークスペースエリアに、グローバル構成のリストが表示されます。
列 | 説明 |
|---|---|
チェックボックス | 構成を選択します。 |
タイトル | 構成の名前を示します。プッシュインジケーター |
タイプ | 構成タイプ |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル構成をサポートしているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラタイプ | 構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル構成チェックボックスを選択して配信リストを表示します。配信リストは、選択した構成に現在登録しているすべてのコントローラを示します。
グローバル構成がない場合は、ワークスペースエリアは空です。追加を選択して新しい構成を作成するか、既存の構成をダブルクリックしてパラメータを表示または編集します。
グローバル構成ライブラリ - グローバル構成の作成またはインポート
グローバル構成の作成:
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーの構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
追加を選択します。
新しい構成の作成ダイアログ ウィンドウが表示されます。
次のパラメータを入力します。
適用する構成について、追加する構成のタイプ、コントローラタイプ、コントローラのソフトウェアバージョンを選択します。
ショートカットウィンドウで追加を選択します。
選択した構成タイプの構成ウィンドウが表示されます。
構成は、構成ライブラリに自動的に保存されます。
既存のグローバル構成のインポート:
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、構成のリストが表示されます。
リストに新しい構成を追加するには、追加を選択します。
新しい構成の作成ポップアップウィンドウが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
インポートした構成の構成ウィンドウが表示されます。
構成は、構成ライブラリに自動的に保存されます。
関連情報
グローバル構成ライブラリ - グローバル構成の削除
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
削除する各構成に、左端の列のチェックボックス
を選択します。管理を選択し、続いて削除を選択します。
グローバル構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバル構成は、構成ライブラリワークスペースのリストから削除されます。構成は、グローバル構成に登録している構成の構成ワークスペースのリストにはまだあります。目に見える変化は、構成がグローバル構成からローカル構成に変換されることです。(ライブラリリンク列の入力はクリアされます)。
グローバル構成ライブラリ - 既存の構成からのグローバル構成の作成
プラント構造
で対象の構成を含むコントローラを選択します。メニューバーで構成
に移動します。1 つ以上の構成を選択して、ライブラリに追加し、管理をクリックして、ライブラリに追加を選択します。
選択したローカル構成がグローバル構成になり、グローバル構成ライブラリに保存されます。
ローカルの変更がコントローラまたは Web インターフェースに行われる場合、2 つのオプションがあります。
自動で元に戻す: コントローラへの変更は、グローバル構成には適用されず、グローバル構成が適用を続けます。
リンク解除: コントローラへの変更がコントローラの構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
[ライブラリ]
を選択します。 上部のメニューバーでグローバル構成
を選択します。ワークスペースには、グローバル構成のリストが表示され、新しく追加された構成がリストに表示されるようになります。
関連情報
グローバル構成ライブラリ - グローバル構成の配信
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
構成チェックボックス
を選択します。管理を選択し、続いて配信を選択します。同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
チェックボックス
で、配信に含める各構成を選択します。ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。ダイアログウィンドウで追加を選択します。
グローバル構成への更新によって、配信されたコピーが更新されます。グローバル構成の変更は選択されたコントローラに適用されます。
ローカルの変更がコントローラまたは Web GUI に行われる場合、2 つのオプションがあります。
自動で元に戻す: コントローラへの変更は、構成には適用されず、グローバル構成がまだ有効です。
リンク解除: コントローラへの変更が構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
変更は、グローバル構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
関連情報
グローバル構成ライブラリ - グローバル構成の編集
左側のメニューバーでライブラリ
を選択します。 グローバルライブラリ
を選択します。ワークスペースに、グローバル構成のリストが表示されます。
編集する構成をダブルクリックします。選択した構成タイプの構成ウィンドウが表示されます。
変更は、グローバル構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
関連情報
グローバル構成ライブラリ - 配信リストからグローバル構成サブスクリプションを削除
グローバル構成の配信リストは、登録リストと同様です。グローバル構成に変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバル構成のチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択した構成に登録しているすべてのコントローラを示します。
1 つのコントローラからグローバル構成の登録を削除するには:
プラント構造ワークスペース
でコントローラを選択します。構成
に移動します。構成ワークスペースに、締め付けプログラムのリストが表示されます。
配信された構成には、ライブラリのリンク列のエントリにはいが示されます。
選択した締め付けプログラムのチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューを選択します。
選択された構成のライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。削除された構成のチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
フィールドバス構成ライブラリ
フィールドバス構成はローカルかグローバルのどちらかになります。
ローカルフィールドバス構成は、単一のコントローラに有効で、グローバルフィールドバス構成は複数の選択されたコントローラに有効です。
コントローラはグローバルフィールドバス構成に登録できます。構成が変更されると、変更は、構成に登録している ToolsTalk 2 のすべてのコントローラに反映されます。
グローバルフィールドバス構成ライブラリは、グローバルフィールドバス構成と構成に登録しているコントローラを管理します。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、ライン構造ワークスペースにプッシュインジケーター が表示されます。
ToolsTalk 2 は、ローカルとグローバルのフィールドバス構成を区別できますが、コントローラ自体はこれを認識していません。したがって、コントローラGUIかウェブGUIのどちらかからフィールドバス構成を変える場合、ToolsTalk 2でアクションを指定することが重要です。
関連情報
本セクション内
フィールドバス構成ワークスペース
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
 に移動します。
に移動します。ワークスペースエリアに、グローバルフィールドバス構成のリストが表示されます。
列 | 説明 |
|---|---|
チェックボックス | フィールドバス構成を選択します。 |
タイトル | フィールドバス構成の名前を示します。プッシュインジケーター |
コントローラへのサイズ | データフレームの受信サイズが表示されます。 |
コントローラからのサイズ | データフレームの送信サイズが表示されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバルフィールドバス構成をサポートしているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラタイプ | フィールドバス構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバルフィールドバス構成チェックボックスを選択して配信リストを表示します。配信リストは、選択したフィールドバス構成に現在登録しているすべてのコントローラを示します。
グローバルフィールドバス構成がない場合は、ワークスペースエリアは空です。追加をクリックして新しいフィールドバス構成を作成するか、既存の構成をダブルクリックしてパラメータを表示または編集します。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の作成またはインポート
フィールドバス構成を作成するには:
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
に移動します。ワークスペースに、フィールドバス構成のリストが表示されます。
リストに新しいフィールドバス構成を追加するには、追加を選択します。
新しいフィールドバス構成の作成 ダイアログボックスが表示されます。
次のパラメータを入力して、新しいフィールドバスマップを追加します。
名前を入力します。
コントローラへのサイズとコントローラからのサイズを入力します。
ショートカットメニューから、デバイスのコントローラタイプとコントローラソフトウェアバージョンを選択します。
ショートカットウィンドウで追加を選択します。
追加したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、フィールドバスライブラリに自動的に保存されます。
既存のフィールドバス構成をインポートするには:
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
に移動します。ワークスペースに、フィールドバス構成のリストが表示されます。
リストに新しい構成を追加するには、追加を選択します。
新しいフィールドバス構成の作成 ダイアログボックスが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <fieldbus_configuration_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
追加したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、フィールドバスライブラリに自動的に保存されます。
関連情報
フィールドバス構成ライブラリ - グローバルフィールドバス構成の削除
左側のメニューバーでライブラリ
を選択します。 フィールドバス構成ライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
フィールドバス構成を削除するには、左端の列のチェックボックス
をオンにし、削除 を選択します。 グローバルフィールドバス構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバルフィールドバス構成は、フィールドバス構成ライブラリワークスペースのリストから削除されます。フィールドバス構成は、グローバルフィールドバス構成に登録されているフィールドバスのフィールドバスワークスペースのリストには残ります。目に見える変化は、フィールドバス構成がグローバルフィールドバス構成からローカルフィールドバス構成に変換されることです。(ライブラリリンク列の入力はクリアされます)。
フィールドバス構成ライブラリ - 既存のフィールドバス構成からのグローバルフィールドバス構成の作成
プラント構造ワークスペース
で (対象のフィールドバス構成を含む) コントローラーを選択します。メニューバーでフィールドバス& SoftPlc
を選択します。フィールドバスメニューから、ライブラリに追加する 1 つ以上のフィールドバス信号構成を選択します。ドロップダウンメニューから 管理、ライブラリに追加の順に選択します。
グローバル構成の作成ダイアログウィンドウが開きます。[の作成] を選択します。
選択したローカル構成がグローバル構成になり、グローバルフィールドバス構成ライブラリに保存されます。
ローカルの変更がコントローラーまたは Web GUI に行われた場合、以下の 2 つのオプションがあります:
自動で元に戻す: コントローラーへの変更は、グローバルフィールドバス構成には適用されず、グローバル構成が適用を続けます。
リンク解除: コントローラーへの変更がコントローラーのフィールドバス構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバルフィールドバス構成はコントローラーへの配信リストから即座に削除されます。
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースには、グローバルフィールドバス構成のリストが表示され、新しく追加されたフィールドバス構成がリストに表示されるようになります。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の配信
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
配信するフィールドバス構成のチェックボックス
を選択します。管理 を選択し、ドロップダウンメニューから配信 を選択します。同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
グローバル構成の配信ダイアログウィンドウが開きます。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。追加を選択します。
グローバル構成への更新によって、配信されたコピーが更新されます。グローバル構成の変更は選択されたコントローラに適用されます。
ローカルの変更がコントローラまたは Web GUI に行われた場合、以下の 2 つのオプションがあります:
自動で元に戻す: コントローラへの変更は、グローバルフィールドバス構成には適用されず、グローバル構成がまだ有効です。
リンク解除: コントローラへの変更がコントローラのフィールドバス構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
変更は、グローバルフィールドバス構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
関連情報
フィールドバス構成ライブラリ - グローバルフィールドバス構成の編集
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
編集するフィールドバス構成をダブルクリックします。
選択したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、グローバルフィールドバス構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
関連情報
フィールドバス構成ライブラリ - グローバルフィールドバス構成のエクスポート
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバス構成ライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
エクスポートするグローバルフィールドバス構成のチェックボックス
を選択します。エクスポートを選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は configuration>.json です。保存をクリックします。
フィールドバス構成ライブラリ - 配信リストからフィールドバス構成サブスクリプションを削除
グローバルフィールドバス構成の配信リストは、登録リストと同様です。グローバルフィールドバス構成に変更を行うと、変更はすべての登録先に反映されます。配布リストは登録を管理します。
グローバルフィールドバス構成のチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択した構成に登録しているすべてのコントローラーを示します。
1 つのコントローラーからグローバルフィールドバス構成の登録を削除するには:
プラント構造ワークスペース
でコントローラーを選択します。フィールドバス & SoftPlc
に移動します。フィールドバスワークスペースに、締め付けプログラムのリストが表示されます。
配信されたフィールドバス構成には、ライブラリのリンク列のエントリにはいが示されます。
選択したフィールドバス構成のチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューで選択します。
選択されたフィールドバス構成のライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 フィールドバス構成ライブラリ
に移動します。削除されたフィールドバス構成のチェックボックス を選択します。
配信リストが更新され、コントローラー名がリストから削除されます。
グローバル設定ライブラリ
パラメータ | 説明 |
|---|---|
チェックボックス | イベント構成テンプレートを選択します。 |
タイトル | イベント構成テンプレートの名前を示します。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | 最終変更の変更者。 |
バージョン | イベント構成テンプレートでサポートされているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラタイプ | イベント構成の対象コントローラタイプを示します。 |
顧客キー | 新しいグローバルイベント構成を作成する場合の既定値はなしです。既存のコントローラからグローバルイベント設定を作成するときに、コントローラの Iam.CustomerKey から取得した値。 |
構成のコマンドボタン設定
コマンド | 説明 |
|---|---|
| |
追加 |
|
管理 |
|
以前のイベント構成テンプレートが存在しない場合、作業スペース領域は空になります。追加を選択して新しいイベント構成テンプレートを作成するか、既存のテンプレートをダブルクリックしてパラメータを表示または編集します。
本セクション内
グローバル設定ライブラリ - グローバルイベント構成の作成または読み込み
グローバルイベント構成の作成:
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
 ライブラリタブを選択します。
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
追加を選択します。
新しいイベント構成の作成 ダイアログボックスが表示されます。
次のパラメータを入力します。
構成に名前を付けます。
コントローラータイプをドロップダウンリストから選択します。
構成に使用するコントローラソフトウェアのバージョンを選択します。
ダイアログウィンドウで追加を選択します。
イベント構成ウィンドウが表示されます。各セクションを展開して、特定のパラメータを設定します。
新しい構成は、グローバル設定ライブラリに自動的に保存されます。
既存のグローバルイベント構成のインポート:
左側のメニューバーでライブラリ
を選択します。 グローバル設定ライブラリ
に移動します。ワークスペースは、グローバルイベント構成のリストを表示します。
リストに新しい構成を追加するには、追加を選択します。
新しいイベント構成の作成 ダイアログウィンドウが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
インポートした構成のイベント構成ウィンドウが表示されます。
構成は、イベント構成ライブラリに自動的に保存されます。
グローバル設定ライブラリ - グローバルイベント構成の削除
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバル設定構成のリストを表示します。
削除する各構成に、左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
グローバル設定構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバル構成は、設定ライブラリワークスペースのリストから削除されます。構成は、グローバル構成に登録している構成のイベント構成ワークスペースのリストにはまだあります。目に見える変更は、構成がグローバルなイベント構成からローカルのイベント構成に変換されることです(設定のイベントの下にあるライブラリリンクもクリアされます)。
グローバル設定ライブラリ - グローバル構成の配信
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
配信するグローバルイベントのチェックボックス
を選択します。管理 を選択し、ドロップダウンメニューから配信 を選択します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
グローバル構成の配信ダイアログウィンドウが開きます。
配信に含める各構成のチェックボックス
を選択します。構成タイプは個別に選択できます。構成間には特定の依存関係があります。グローバル構成の配信を選択すると、追加の構成がデフォルトで選択される場合があります。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。
ダイアログウィンドウで追加を選択します。
ダイアログウィンドウが閉じ、コントローラが 配信先 のリストに追加されます。設定 のイベント メニューに新しい [ライブラリ] リンクが追加されます。
選択された構成は、ToolsTalk 2.のコントローラのみに配信されます。
新しい構成を配布すると、既存の構成が削除され、ライブラリテンプレートの構成に置き換えられます。
グローバル構成ライブラリ - 配信リストからグローバル構成サブスクリプションを削除
グローバル構成の配信リストは、登録リストと同様です。グローバル構成に変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバル構成のチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択した構成に登録しているすべてのコントローラを示します。
1 つのコントローラからグローバル構成の登録を削除するには:
プラント構造ワークスペース
でコントローラを選択します。構成
に移動します。構成ワークスペースに、締め付けプログラムのリストが表示されます。
配信された構成には、ライブラリのリンク列のエントリにはいが示されます。
選択した締め付けプログラムのチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューを選択します。
選択された構成のライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。削除された構成のチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
グローバル設定ライブラリ - グローバルイベント構成の編集
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
編集する構成をダブルクリックします。選択した構成タイプの構成ウィンドウが表示されます。
変更は、グローバル設定構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
グローバル設定ライブラリ - グローバルイベント構成のエクスポート
グローバルイベントテンプレートは、エクスポートして、別の ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールで再利用 (インポート) できます。
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
エクスポートするコントローラテンプレートのチェックボックス
を選択します。エクスポートを選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
既定ファイル名は <Configuration>.json です。保存を選択します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。
エクスポートされた *.json ファイル内で、コントローラテンプレートには、コントローラ列の名前が指定されます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内のこのフィールドから取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。
コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
プログラムテンプレート

ライブラリ > プログラムテンプレート
マルチステップ締め付けプログラムのテンプレートを作成します。新しいマルチステッププログラムを作成する際、テンプレートは、マルチステッププログラムを構築する基盤として使用できます。
追加をクリックして新しいテンプレートを作成します。
プログラムテンプレートリストのテンプレートをダブルクリックして、既存のテンプレートを変更します。テンプレートはプログラムにリンクされるのではなく、コピーされるので、そのテンプレートに基づくマルチステッププログラムには影響しません。
プログラムテンプレートワークスペース
左側のメニューバーでライブラリ
を選択します。 プログラムテンプレートライブラリ
に移動します。ワークスペースエリアが、グローバル締め付けプログラムテンプレートのリストを表示します。
列 | 説明 |
|---|---|
チェックボックス | 締め付けプログラムテンプレートを選択します。 |
名前 | 締め付けプログラムテンプレートの名前が表示されます。プッシュインジケーター |
戦略 | 締め付けプログラムテンプレートに選択されている締め付け戦略。 |
ターゲット | 最終目標は、トルク値または角度値で表されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル締め付けプログラムテンプレートをサポートできるコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 締め付けプログラムテンプレートのリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 締め付けプログラムテンプレートのコントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル締め付けプログラムテンプレートチェックボックスを選択して配信リストを表示します。配信リストは、選択したプログラムテンプレートに現在登録しているすべてのコントローラを示します。
グローバル締め付けプログラムテンプレートがない場合は、ワークスペースエリアは空白です。追加を選択して新しい締め付けプログラムテンプレートを作成するか、既存の締め付けプログラムテンプレートをダブルクリックしてパラメータを表示または編集します。
締め付けプログラムテンプレートのインポート
事前にエクスポートされた締め付けプログラムテンプレートは、ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールにインポートできます。
左側のメニューバーでライブラリ
を選択します。 プログラムテンプレート
に移動します。ワークスペースは、締め付けプログラムテンプレートのリストを表示します。
追加を選択し、新しい締付けプログラムの作成 テンプレートの インポート タブを選択します。
ファイルを開く を選択し、目的のインポートファイルを選択します。ファイルは <tightening_program_template_name>.json の形式である必要があります。開くを選択します。
ワークスペースは、締め付けプログラムテンプレートの更新ずみのリストを表示します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。*.json ファイルには、締め付けプログラムテンプレートのリストに示されている締め付けプログラムテンプレート名が含まれます。締め付けプログラムテンプレートがインポートされると、締め付けプログラムテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内から取られます。つまり、インポートした締め付けプログラムテンプレートはインポートしたファイル名と名前が異なる場合があります。締め付けプログラムテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
コントローラ構成ライブラリ
コントローラライブラリのはじめに
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラライブラリワークスペース
パラメータ | 説明 |
|---|---|
チェックボックス | コントローラテンプレートを選択します。 |
コントローラ | コントローラテンプレートの名前を示します。 |
最終変更 | ToolsTalk 2時間で表される最終変更。 |
変更者 | 最終変更の変更者。 |
バージョン | コントローラテンプレートでサポートされているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
コントローラテンプレートがない場合は、ワークスペースエリアは空白です。追加をクリックして新しいコントローラテンプレートを作成するか、既存のテンプレートをダブルクリックしてパラメータを表示または編集します。
コントローラー構成ライブラリ - 新規コントローラーテンプレートの作成
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
追加を選択します。
新しいコントローラーテンプレートの作成 ダイアログボックスが表示されます。
次のパラメータを入力します。
コントローラテンプレートに名前を付けます。
コントローラータイプをドロップダウンメニューから選択します。
ドロップダウンメニューからコントローラソフトウェアのバージョンを選択します。
追加を選択します。
ダイアログウィンドウが閉じ、コントローラテンプレートが更新されます。
正しいコントローラソフトウェアのバージョンを選択することが重要です。テンプレートは、同じソフトウェアバージョンを持つコントローラにしか配信できません。
コントローラ構成ライブラリ -コントローラーテンプレートの削除
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
を選択します。ワークスペースは、コントローラテンプレートのリストを表示します。
削除するコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューから削除 を選択します。テンプレートがリストから削除されます。
コントローラ構成ライブラリ - 既存のコントローラからのテンプレートの作成
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
プラント構造ワークスペース
でコントローラを選択します。ドロップダウンメニューから 管理、ライブラリに追加を選択します。
ハードウェアとツールに依存するものを除く、すべてのコントローラ構成は、コントローラ構成ライブラリにコピーされます。
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーからコントローラーの構成
を選択します。ワークスペースにコントローラ構成のリストが表示され、テンプレートとして使用できる新しく作成されたコントローラ構成がリストに表示されます。
コントローラテンプレートの名前はソースコントローラ名からコピーされます。
コントローラテンプレートには、ライブラリで一意の名前を付けることを推奨します。
コントローラ構成ライブラリ - コントローラーテンプレートの配信
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラテンプレートまたはその一部は、1 つ以上のコントローラに配信できます。配信とは、構成がテンプレートからコピーされ、配信先のコントローラで許可されている場合に、構成を上書きすることです。
コントローラテンプレートソフトウェアのバージョンは、配信先のコントローラソフトウェアのバージョンと同じでなければなりません。一致しない場合、配信はできません
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
配信するコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューから配信 を選択します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
コントローラテンプレートの配信ダイアログウィンドウが開きます。
配信に含める各構成のチェックボックス
を選択します。構成タイプは個別に選択できます。構成間には特定の依存関係があります。テンプレート構成を配信することを選択すると、追加の構成がデフォルトで選択される場合があります。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。
ダイアログウィンドウで配信をクリックします。
ダイアログウィンドウが閉じます。
選択された構成は、ToolsTalk 2.のコントローラのみに配信されます。
配信に選択された構成によって、既存の構成が削除され、テンプレートからのコントローラ構成で代替されます。
関連情報
コントローラー構成ライブラリ - コントローラーテンプレートの編集または構成
コントローラテンプレートの編集は、通常のコントローラ構成と同様です。ほとんどのメニューアイコンとパラメータ設定は、ToolsTalk 2GUI の実際のコントローラの場合と同一です。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
コントローラテンプレートのリストの名前フィールドをダブルクリックします。
コントローラワークスペースは実際のコントローラと同一です。これがコントローラテンプレートであることを示すため、コントローラメニューの背景色は、濃い灰色ではなくで薄い灰色になっています。
コントローラ構成ライブラリ - コントローラテンプレートのエクスポート
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラーテンプレートは、エクスポートして、別の ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールで再利用 (インポート) できます。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
エクスポートするコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は <controller_template_name>.json です。保存を選択します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。
エクスポートされた *.json ファイル内で、コントローラテンプレートには、コントローラ列の名前が指定されます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内のこのフィールドから取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。
コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
コントローラ構成ライブラリ - コントローラテンプレートのインポート
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
事前にエクスポートされたコントローラーテンプレートは、ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールにインポートできます。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
追加を選択し、新しいコントローラテンプレートの作成 ウィンドウの インポート タブを選択します。
ファイルを開く を選択し、目的のインポートファイルを選択します。ファイルは <controller_template_name>.json の形式である必要があります。開くを選択します。
ワークスペースは、コントローラテンプレートの更新されたリストを表示します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。*.json ファイルには、コントローラテンプレートのリストに示されているコントローラテンプレート名が含まれます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内から取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
グローバルSync Modeライブラリ
グローバルSync Modeライブラリワークスペース
左側のメニューバーでライブラリ
を選択します。 Sync Modeライブラリ
 に行きます。
に行きます。
列 | 説明 |
|---|---|
チェックボックス | 例えば、Sync Modeを削除する際に使用します。 |
タイトル | Sync Modeのユーザ定義名 |
説明 | Sync Modeの説明。 |
操作モード | 操作モードが [締め付け] または [緩め] のどちらであるかが表示されます。 |
チャンネル | Sync Modeのチャンネル数。 |
最終変更 | ToolsTalk 2 時間で表す時間。 |
変更者 | 構成データを最後に変更して保存したユーザーを表示します。 |
バージョン | コントローラーのソフトウェアバージョン |
コントローラータイプ | コントローラーのタイプ |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバルSync Modeのチェックボックスを選択して配布リストを表示します。配布リストは、選択した構成に現在登録しているすべてのコントローラーを表示します。
Sync Modeがない場合は、ワークスペースエリアは空白です。[追加]をクリックして新しいSync Modeを作成するか、既存のSync Modeをダブルクリックしてパラメータを表示または編集します。
グローバルSync Modeライブラリ - グローバルSync Modeの作成
グローバルグローバルSync Modeライブラリ - グローバルSync Modeの作成:
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーのSync Modeライブラリ
に移動します。ワークスペースには、グローバルSync Modeのリストが表示されます。
[追加]を選択します。
新しいモードの作成ダイアログ ウィンドウが表示されます。
次のパラメータを入力します:
[コントローラタイプ]、[ コントローラーソフトウェアバージョン]、[グローバルSync Mode] のユーザー定義の名前を選択し 、ドロップダウンリストから [操作モード] を選択します。
[追加]を選択します。
選択したタイプのSync Mode の構成ウィンドウが表示され、「Sync Mode 」のセクションで説明されているように、Sync Mode のパラメータを入力できます。
Sync Mode構成は、Sync Modeライブラリに自動的に保存されます。
グローバルSync Modeライブラリ - 配布済みSync Modeのインポート
万が一ToolsTalk 2ライセンスのダウングレードが発生した場合、グローバル配布は自動的にエクスポートされます。これらのグローバル配布は、後で [配布済みのインポート] 機能を使用してインポートできます。
エクスポートされた配布は、インストール時にバックアップフォルダーとして選択されたフォルダーに保存されます。パス = BackupFolder/DistributedConfigs
左側のメニューバーでライブラリ
を選択します。Sync Modeライブラリ
に行きます。ワークスペースには、グローバルSync Modeのリストが表示されます。
[管理]を選択し、続いて[配布済みのインポート]を選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <Syncmodename>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
インポートしたSync Modeの構成ウィンドウが表示されます。
Sync Mode構成は、Sync Modeライブラリに自動的に保存されます。
グローバルSync Modeライブラリ - グローバルSync Modeの削除
左側のメニューバーでライブラリ
を選択します。Sync Modeライブラリ
に行きます。ワークスペースには、グローバルSync Modeのリストが表示されます。
削除する各Sync Modeの、左端の列のチェックボックス
を選択します。管理を選択し、続いて削除を選択します。
グローバルSync Modeの緩めが締め付けSync Modeに接続されている場合、Sync Modeを削除することはできません。
グローバルSync Modeが、ライブラリから削除され、リストが更新されます。
削除したSync Modeに登録されているコントローラーは、Sync Modeを失いません。削除されたグローバルSync Modeは、Sync Modeライブラリワークスペースのリストから削除されます。Sync Modeは、グローバルSync Modeに登録されているコントローラのSync Modeワークスペースのリストには残ります。目に見える変化は、Sync ModeがグローバルSync ModeからローカルSync Modeに変換されることです。(ライブラリリンク列の入力はクリアされます)。
グローバルSync Modeライブラリ - グローバルSync Modeの配信
左側のメニューバーでライブラリ
を選択します。 Sync Modeライブラリ
に行きます。ワークスペースには、グローバルSync Modeのリストが表示されます。
配布するSync Modeのチェックボックス
を選択します。 Sync Modeがすでにコントローラーに配布されている場合は、チェックボックス
を選択すると、コントローラー名とインデックスが画面の右側に表示されます。管理を選択し、続いて配布を選択します。
チェックボックス
で、配布に含める各構成を選択します。[グローバル構成の配布] ダイアログウィンドウの右側で1つまたは複数のコントローラーを選択し、必要に応じてインデックスを入力します。ダイアログウィンドウで追加を選択します。
グローバルSync Modeへの更新によって、配布されたコピーが更新されます。グローバルSync Modeの変更は選択されたコントローラーに適用されます。
ローカルの変更がコントローラーまたは Web GUI に行われる場合、2 つのオプションがあります。
自動で元に戻す: コントローラへの変更は、Sync Modeには適用されず、グローバルSync Modeがまだ有効です。
リンク解除: コントローラへの変更がSync Modeに適用され、グローバルSync Modeへのリンクが切断されます。その結果、Sync Modeはコントローラーへの配信リストから即座に削除されます。
グローバルSync Modeライブラリ - 配信リストからグローバルSync Modeサブスクリプションを削除
グローバルSync Modeの配信リストは、登録リストと同様です。グローバルSync Modeに変更を行うと、変更はすべての登録先に反映されます。配布リストは登録を管理します。
グローバルSync Modeのチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択したSync Modeに登録しているすべてのコントローラを示します。
1 つのコントローラからグローバルSync Modeの登録を削除するには:
プラント構造ワークスペース
でコントローラを選択します。Sync Mode
に行きます。Sync Modeワークスペースには、Sync Modeのリストが表示されます。
配信されたSync Modeには、ライブラリのリンク列のエントリにはいが示されます。
選択したSync Modeのチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューを選択します。
選択されたSync Modeのライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 Sync Modeライブラリ
に行きます。削除されたSync Modeのチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
グローバルSync Modeライブラリ - グローバルSync Modeの編集
左側のメニューバーでライブラリ
を選択します。 Sync Modeライブラリ
に行きます。ワークスペースには、グローバルSync Modeのリストが表示されます。
編集するSync Modeをダブルクリックします。
選択したSync Mode構成の構成ウィンドウが表示されます。
Sync Modeは、グローバルSync Modeライブラリに自動保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター
が表示されます。
プログラムの承認
このセクションでは、プログラムの締め付けまたは緩めの承認プロセスについて説明します。プログラムの承認は、承認権限を持つユーザーによって管理されます。
関連情報
[システム管理] タブでの作業
ToolsTalk 2 のシステム管理タブ は、左側のメニューバーにあり、次の機能を提供します。
システム管理タブ | 説明 |
|---|---|
| コントローラソフトウェアとデータ管理 すべてのコントローラへのソフトウェア更新を管理します。カスタム・セクションにコントローラを体系づけてください。 |
| スケジュールされたタスク コントローラ構成は、スケジュールした間隔でエクスポートとインポートができます。 |
| 機能管理システム (FMS) 選択されたコントローラ間でライセンスされる機能の配信を管理します。 |
| ユーザーグループ ToolsTalk 2 の情報を表示または編集するための異なる権限を、異なるユーザーグループに指定できます。 |
コントローラソフトウェアとデータ管理
コントローラの結果と設定のエクスポート。
コントローラ設定のインポート。
新しいコントローラソフトウェアの読み込み。
コントローラソフトウェア間の切り替え。
レポートの生成。
カスタム・セクションにコントローラを体系づけてください。
コントローラ構成パラメータをエクスポートし、コントローラ・プログラムをそのまま(変化なし)にしておいてください。
コントローラー構成をインポートします。
ソフトウェアの更新は、コントローラのソフトウェアを変更します。コントローラ名、IP アドレス、サーバー接続は、手作業で有力可能です。
スケジュールされたタスク
コントローラの結果と設定のエクスポート。
コントローラ設定のインポート。
選択したコントローラへのエクスポートとインポートタスクのスケジュール。
データベースのメンテナンス
コントローラー構成のプッシュ
エクスポート/インポートはコントローラの構成パラメータを変更し、コントローラのプログラムは変更しません。コントローラ名、IP アドレス、サーバー接続は、この操作では影響されません。
機能管理システム
コントローラへのライセンスされた機能の追加。
コントローラからのライセンスされた機能の削除。
ライセンスされた機能のプールの管理。
必要に応じたアトラスコプコからの追加機能の読み込みと、不要になった場合の機能の返却。
ユーザーグループ
異なるユーザーグループの作成。
フォルダと個別コントローラを閲覧する権利を管理します。
ToolsTalk 2 機能の構成権限の管理。
コントローラパラメータと機能の構成権限の管理。
コントローラソフトウェアとデータ管理
コントローラソフトウェアとデータ管理のはじめに
システム管理 に移動し、コントローラソフトウェアとデータ管理 を選択します。
コントローラの結果、構成、設定のエクスポート。
コントローラ設定のインポート。
新しいコントローラソフトウェアの読み込み。
コントローラソフトウェア間の切り替え。
レポートの生成。
カスタム・セクションにコントローラを体系づけてください。
コントローラを検索します。
エクスポート/インポート: コントローラの構成パラメータを変更し、コントローラのソフトウェアプログラムは変更しません。
ソフトウェア更新: コントローラのソフトウェアを変更し、コントローラの構成のパラメータは変更しません。
コントローラ名、IP アドレス、サーバー接続は、この操作では影響されません。
列 | 説明 |
|---|---|
コントローラ | コントローラ名。 |
コントローラータイプ | 適用されるコントローラの種類。 |
工場ポート | オン: 工場出荷時ポート経由で有効な通信を使用するコントローラ用。 接続が無効になると (コントローラ設定でオフに設定)、テキストは表示されません。 |
現在のバージョン | 現在のソフトウェアバージョン。 赤: ソフトウェアは承認済みのソフトウェアリストにありません。リストに追加するには、追加コマンドボタンをクリックして、現在のソフトウェアバージョンを入力します。 黒: ソフトウェアは承認済みのソフトウェアリストにあります。 |
保存したバージョン | 保存された非アクティブなソフトウェアバージョン。 |
操作 | 以下の様な、継続中の作業を示します。 インポートおよびエクスポートの間のタスク状態と結果および、ソフトウェア更新のタスク状態と結果。 |
コントローラ名の左側にあるボックスを選択して、次の表に示すオプションを有効にします。
ボタン | 説明 |
|---|---|
再起動 | 選択したコントローラを再起動するには |
レポートの生成 | SoftwareVersionReportcsv.csv ファイルを生成して、保存の選択のためのダイアログポップアップウィンドウを開きます。 |
ソフトウェア |
|
エクスポート/インポート |
|
ボタン | 説明 |
|---|---|
編集 | カスタム・セクションを体系化する為に、編集モードをアクティベートおよび非アクティベートします。 |
+ | カスタム・セクションのフォルダー(またはサブフォルダ)を追加します。編集モード以外のときには見えません。 |
- | カスタム・セクションのフォルダー(またはサブフォルダ)を削除します。編集モード以外のときには見えません。 |
エクスポートとインポートの機能は、コントローラ構成 とスケジュールしたエクスポートとインポート にもあります。ファイルの形式と結果は同じです。
ワークスペースウィンドウの右側には、コントローラでの実行が許可されている承認済みのソフトウェアのリストがあります。承認されていないソフトウェアには、現在のバージョン列に赤のマークが付いています。
コマンド | 説明 |
|---|---|
追加 | ショートカットメニューを開いて、リストに新しいソフトウェアバージョンを入力します。 |
削除 | 1 つ以上の選択したソフトウェアバージョンをリストから削除します。 |
レポートの生成では、列に次の情報の行列を含む SoftwareVersionReportcsv.csvファイルを作成します。
コントローラ名。
現在のソフトウェアバージョン。
保存されたソフトウェアバージョン。
現在のソフトウェアが承認されているかどうかの表示。
プラント構造のコントローラを体系付け、以下のショートカット・オプションにアクセスする為に、コントローラ名をクリックしてください。コントローラ名の背景色は、水色に変化します。
いかなる時も、20個を上限にコントローラを選ぶことができます。
コントローラーを右クリックすると、以下のオプションが表示されます。
ショートカット・メニュー | 説明 |
|---|---|
新しいコントローラーの追加 | プラント構造コントローラ・リストに、新しいコントローラを追加します。 |
コントローラーの接続 | コントローラの状態をオンラインに設定します。 |
コントローラーの切断 | コントローラの状態をオフラインに設定します。コントローラ名は、抹消されます。 |
稼働状態をリセットします。 | コントローラの状態を強制的にリセットします。現在の状態をクリアーし、アイドル状態にリセットします。これは、開始したプロセスを中断することはありません。そして、接続が切れた場合でもフェールセーフの役割を果たします。 |
削除 | プラント構造コントローラ・リストからコントローラを削除します。 コントローラが全てのコントローラフォルダから削除されたなら、それは永久に削除されたことを意味します。 |
コントローラの検索
[コントローラソフトウェアとデータ管理] ワークスペースには、2 つの検索フィールドがあります。1つのフィールドは、カスタムセクションにおけるコントローラを検索するだけです。そして、もう一つが、コントローラリストにおける全てのコントローラを検索します。
検索フィールドに、コントローラ名の2個以上の文字を入力してください。
コントローラ名またはコントローラのタイプを利用して、検索することが可能です。メインのコントローラリストで、ソフトウエアバージョンを検索することも可能です(現在のバージョン)。
エクスポートとインポート
エクスポート/インポートの機能を用いて、外部プログラムでの分析のために、結果メニューでアクセスできるイベントと締め付け結果をエクスポートするとともに、コントローラ間で締め付けプログラム、バッチ、およびコントローラ構成を転送します。
エクスポート/インポートコマンドは、次のために使用できます:
さらに処理するために締め付け結果やイベントをエクスポートする。
アトラスコプコのサービスエンジニアによるデバッグ作業のための、ログファイルのエクスポート。
別のコントローラに構成をコピーするために使用できるコントローラ構成全体のエクスポート。
違いを見るための、エクスポートされた 2 つの構成の比較。
コントローラー構成のインポート。
エクスポート中
システム管理 タブ
を選択します。コントローラソフトウェアとデータ管理
 に移動します。
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラ構成のエクスポートができます。エクスポート/インポートを選択して、次のいずれかをエクスポートします。
パラメータ
説明
エクスポート...
すべてのコントローラ情報をエクスポートします。
エクスポートされたファイルのファイル名と拡張子は、<Filename>.tar.gz のようになります。
構成のエクスポート…
設定と構成をエクスポートします。
エクスポートされたファイルのファイル名と拡張子は、<Filename>.tar.gz のようになります。
プログラムをCSVにエクスポート
各コントローラーのプログラムをエクスポートします。(マルチステッププログラムでは使用できません)
コントローラごとに1つのファイルがあります。エクスポートされたファイルのファイル名と拡張子は、<Filename>.csv のようになります。
ツールログのエクスポート
接続されているツールからログ (締め付けおよびハードウェアの情報) をエクスポートします。SRB、TBP、STB に使用できます。
エクスポートは atlas_tool_i.zip と ExportInfo.txt から構成されます。
エクスポートファイルを保存する場所を選択して、OK を選択します。
ファイル名は、コントローラを識別する部分とタイムスタンプの部分で構成されます。
コントローラー構成のインポート
インポートコマンドの目的は、コントローラ設定をコピーして、以前にエクスポートしたソースファイルを再利用し、<Filename>.tar.gz のようなファイル名と拡張子を持つことです。
左側のメニューバーでシステム管理
を選択します。ワークスペースウィンドウの上部にあるメニューバーからコントローラソフトウェアとデータ管理
を選択します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラ構成のインポートができます。エクスポート/インポートを選択します。
選択ファイルにインポートのダイアログウィンドウが開きます。
ファイルを開くを選択して、選択したファイルを参照します。
ファイルを選択して開くを選択します。
ファイルパスが示され、インポートボタンが有効になります。インポートを選択します。
再起動後、インポートしたファイルが新しい構成設定で使用されます。
ファイルのインポートによって、コントローラのプログラムが変更されることはありません。工場出荷時の IP アドレス以外のすべての設定と構成が変更されます。
コントローラーソフトウェアの更新
コントローラソフトウェアの更新と切り替えは、緊密に接続されている 2 つの異なるタスクです。コントローラは、アクティブなバージョンとパッシブなバージョンの、2 つの異なるソフトウェアバージョンをインストールできます。2 つのバージョン間の切り替えは簡単です。コントローラソフトウェアの切り替えでは、アクティブなソフトウェアとパッシブなソフトウェアを切り替えます。
新しいソフトウェアをコントローラに読み込むには:
システム管理 タブ
を選択します。コントローラソフトウェアとデータ管理
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラソフトウェアの更新ができます。ソフトウェア を選択し、次にドロップダウンメニューから ソフトウェア更新 を選択します。
ソフトウェア更新のダイアログウィンドウが開きます。
ファイルを開くを選択して、選択したファイルを参照します。
ファイル名は -px2it.zip で終わるようにします。
ファイルをマークして開くを選択します。
ファイルパスが示され、ソフトウェア更新ボタンが有効になります。ボタンを選択してソフトウェアの読み込みを始めます。
コントローラー アプリケーションが繰り返し起動に失敗した場合、コントローラーはレスキューモードで起動します。レスキューモードでは、新しいファームウェアをインストールできます。レスキューイメージはソフトウェアアップデートとともに配布され、新しいレスキューイメージが存在する場合は更新できます。
レスキューイメージの更新中は、システムの電源を切らないでください。更新を開始すると、システムが再起動します。
コントローラーソフトウェアの切り替え
コントローラソフトウェアの更新と切り替えは、緊密に接続されている 2 つの異なるタスクです。コントローラは、アクティブなバージョンとパッシブなバージョンの、2 つの異なるソフトウェアバージョンをインストールできます。2 つのバージョン間の切り替えは簡単です。コントローラソフトウェアの切り替えでは、アクティブなソフトウェアとパッシブなソフトウェアを切り替えます。
コントローラに保存されているソフトウェアを有効にするには:
左側にあるメニューバーでシステム管理タブ
を選択します。コントローラソフトウェアとデータ管理
 に移動します。
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コマンドが実行できます。ソフトウェア を選択し、次にドロップダウンメニューから 保存済みソフトウェアの有効化 を選択します。
ワークスペースのソフトウェア更新列に、次のメッセージが示されます。
保存されたソフトウェアのアクティブ化。
保存されたソフトウェアがアクティブ化されました。コントローラーの再起動中。
コントローラソフトウェアレポートの生成
コントローラ更新ワークスペースには、すべてのコントローラと現在実行中のソフトウェアと保存されているソフトウェアの両方が表示されます。
ファイルのリストを生成するには:
左側にあるメニューバーでシステム管理タブ
を選択します。コントローラソフトウェアとデータ管理
に移動します。レポートの生成を選択します。
ブラウザダイアログウィンドウが開きます。
ファイルの場所を選択して、保存を選択します。
SoftwareVersionResultcsv.csv ファイルが選択された場所に書き込まれます。
カスタムセクションの管理
システム管理タブ
に移動し、コントローラソフトウェアとデータ管理 を選択します。カスタム・セクションで、 編集
 を選択して、編集モードに入ります。編集モードに入ると、色が水色に変わりますが、それは選択されたことを示します。+ と -の新しい2つのボタンが現れます
を選択して、編集モードに入ります。編集モードに入ると、色が水色に変わりますが、それは選択されたことを示します。+ と -の新しい2つのボタンが現れます 。
。
編集モードでは、以下の体系化オプションが利用可能です:
新しいフォルダの作成
新しいサブフォルダの作成
フォルダまたはサブフォルダの削除
コントローラのフォルダへのコピー
フォルダおよびコントローラの表示順序の変更
編集モードから退出するには:
編集をクリックして、編集モードを終了します。編集 モードから出ると、色が変わり、 +と-のボタンが消えます。
新規フォルダの作成
編集ボタンの左側にある + ボタンを選択します。
または
フォルダー領域のどこでも良いので右クリックし、ショートカット・メニューにあるフォルダーを追加を選択します。
新しいフォルダが作成され、リストに追加されます。
[新しいフォルダ] を選択します。色が水色に変わり、選択されたことを示します。
F2を押し、 フォルダーに名前を付けなおして、エンターを押します。
新しいサブフォルダの作成
フォルダ名の右にある+ ボタンをクリックします。
または
既存のフォルダー上で右クリックし、ショートカットメニューにあるフォルダーを追加を選択します。
新しいフォルダが作成され、リストに追加されます。
[新規フォルダ] を選択します。色が水色に変わり、選択されたことを示します。
F2を押し、 フォルダーに名前を付けなおして、エンターを押します。
フォルダまたはサブフォルダの削除
フォルダ名の右にある- ボタンを選択します。
または
既存のフォルダー上で右クリックし、ショートカットメニューの削除をクリックします。
フォルダは削除され、そして、コントローラのコピーは取り外されます。
サブフォルダを含むフォルダーが削除される場合、全てのサブフォルダ―も削除されます。
コントローラのフォルダへのコピー
全てのコントローラを選択します。または、コントローラリストの上にあるドロップダウン・メニューから、適切なカスタム・セクションを選択します。
コントローラを選択します。色が水色に変わり、選択されていることが示されます。
コントローラは、一つでも複数でも、選択可能です。
Ctrl+ Left click を押し、選択するコントローラーを追加します。
Ctrl+ Left click を押し、一度に選択するコントローラーを複数追加します。
選択したコントローラをコピー先のフォルダにドラッグします。
フォルダおよびコントローラの順序の変更
選択したフォルダまたはコントローラを新しい位置にドラッグします。
スケジュールされたタスク
[システム管理] タブに移動し、[スケジュールされたタスク]  を選択します。ワークスペースには、次の情報が表示されます。
を選択します。ワークスペースには、次の情報が表示されます。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスを使用してタスクを選択します。 |
説明 | タスクの説明。 |
タイトル | タスクの種類。 |
最終変更 | 最新の変更のタイムスタンプ。 |
変更者 | タスクの変更者。 |
最新の実行 | タスクが最後に実行された時。 |
動作中 | 現在動作中のタスクの状態情報。 |
コマンド | 説明 |
|---|---|
今すぐ実行 | タスクを選択して、設定されているスケジュール日時まで待つことなく、即座に実行を強制します。スケジュールされたタスクにアップロードファイルの場所またはバックアップファイルの場所がある場合、 「今すぐ実行」を機能させために、場所を定義する必要があります。 |
追加 | 新しいタスクを作成します。タスクタイプを選択します。 |
削除 | タスク表から 1 つ以上のタスクを削除します。 |
右側のコントローラのリストには、スケジュールされたタスクによって影響されるコントローラが表示されます。タスクが 1 つ以上選択されている場合にのみ、リストが自動表示されます。
本セクション内
スケジュールされたタスクの管理
システム管理
に移動します。スケジュールされたタスク
に移動します。
既存のタスクをダブルクリックして、構成を表示します。
メニュー | 説明 |
|---|---|
プロパティ | タスクに名前と説明を指定します。 |
スケジュール | タスクの時間と間隔の設定。 |
コントローラ | タスクによって影響されるコントローラを選択します。 |
結果 | タスクの結果。 |
ファイルのインポート | タスクのタイプがコントローラー構成のインポートの場合にのみ表示されます。 |
バックアップの場所 | タスクのタイプがコントローラー構成のエクスポートの場合にのみ表示されます。 |
新しくスケジュールされたタスクの追加
追加を選択します。
スケジュールされたタスクの種類を選択します。
コントローラー構成のエクスポート
コントローラー構成のインポート
データベースメンテナンス
コントローラー構成のプッシュ
ライセンス配布のエクスポート
今すぐ実行
対応するチェックボックスをオンにして、タスクを選択します。
今すぐ実行を選択して、タスクを即座に実行します。
スケジュールされたタスクの削除
該当するチェックボックスを選択タスクを選択し、削除を選択して選択したタスクを削除します。
削除されたタスクは、スケジュールされたタスクのリストから削除されます。
スケジュールされたタスクの編集
編集するタスクをダブルクリックします。
スケジュールされたタスクを編集します。
変更は自動的に保存され、プッシュは必要ありません。
エクスポートとインポートの機能は、コントローラ構成 とコントローラソフトウェアとデータ管理 にもあります。ファイルの形式と結果はどちらも同じです。
関連情報
コントローラの選択
インポート、エクスポートを有効化し、コントローラ構成タスク・スケジュールを押します。
スケジュールされているタスクを実行するコントローラを選択します。
パラメータ | 説明 |
|---|---|
すべてのコントローラーをスケジュール | はいに設定すると、スケジュールされているタスクは、ToolsTalk 2 に接続され、プラント構造 はいに設定されている場合、コントローラ・リストは見えません。 いいえに設定されている場合、コントローラ・リストは見え、個々の選択が可能です。 |
全てにチェックを入れる | すべてのコントローラに自動的にマークが入り、タスクはすべてのコントローラで実行されます。 個別のコントローラの選択を解除することが可能です。 |
| スケジュールされているタスクを実行するコントローラを選択します。タスクは、選択したコントローラのみに影響します。 |
全てにチェックを入れることとすべてのコントローラーをスケジュールすることとの、重要な違い:
全てにチェックを入れる |
|---|
個別のコントローラが簡単に選択または選択解除できます。 静的リスト。新しいコントローラが追加されても、自動的には含められません。 |
すべてのコントローラーをスケジュール |
|---|
接続されているコントローラの構造の変更は、スケジュールされているタスクを変更しません。 動的リスト、すべてのコントローラに影響します。 |
重要:
インポートが同じインポートファイルを使用して複数のコントローラに行われる場合、コントローラ名フィールドが、インポートされたファイルのコントローラで上書きされます。全てのコントローラが同じ名前を持つ結果になります。
名前が認識されなくなるので、名前の指定されたコントローラで行う、その後のインポートまたはエクスポートは失敗します。
この問題の解決策の 1 つは、すべてのコントローラーをスケジュールするをはいに設定することです。
コントローラー構成のエクスポート
このメニューでは、スケジュールされたタスクの種類がコントローラー構成のエクスポートに表示されます。
パラメータ | 説明 |
|---|---|
バックアップの場所 | エクスポートファイルが書き込まれる場所への有効なパスを入力します。デフォルト値はエラーインジケーター スケジュールされているタスクが実行されるには、パスが有効である必要があります。 |
ファイル名 | エクスポートされるファイルの形式: *.tar.gz 後で構成をコントローラにインポートしたり、デバッグや障害の分析のためにアトラスコプコに送信するために使用できます。 デフォルトのファイル名は、PFExport_<controller-name>_<Date-code>.tar.gz のようになります。 区別するためと固有なファイル名を作成するために、システム変数が使用できます。 |
コントローラー毎のフォルダ | はいに設定すると、各エクスポートは個別のサブフォルダに保存されます。 いいえに設定すると、エクスポートは場所の保存フォルダに保存されます。 |
フォルダ名 | 区別のためと固有なフォルダ名を作成するために、システム変数が使用できます。 |
古い構成ファイルの削除 | [はい]に設定すると、一意のファイル名で保存されている古いコントローラー構成ファイルが削除されます。一意のファイル名には、システム変数が含まれている必要があります。例えば、<コントローラー名>などです。 |
エクスポートするファイル名とフォルダ名を指定するために、システム変数を使用できます。ファイル名またはフォルダに実行時に追加され、固有なエクスポートファイルまたは場所を作成します。
システム変数はカッコ内に書き込まれ、次が使用できます。
[ControllerName]
[IpAddress]
[ControllerSerialNumber]
テキストとシステム変数を組み合わせることができます。例: Station_3_[ControllerName]_[IpAddress]。コントローラ名が ABC で IP アドレスが 10.25.25.180 の場合、実行時にできるファイル名は Station_3_ABC_10.25.25.180.tar.gz になります。
スケジュールされたファイルのエクスポートは、コントローラがエクスポート時にオンラインで、エクスポートパスが有効である場合にのみ行われます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
コントローラー構成のインポート
このメニューでは、スケジュールされたタスクの種類がコントローラー構成のインポートに表示されます。
メニュー項目 | 説明 |
|---|---|
ファイル名 | ファイルと名前は事前にエクスポートされている構成ファイルです。次の形式にします。*.tar.gz |
参照 | このコマンドで、インポートするファイルを検索する参照ウィンドウが開きます。 |
ファイルが ToolsTalk 2に読み込まれ、スケジュールされたタスクがスケジュールされた時間に実行されます。
ファイルのインポートによって、コントローラのプログラムが変更されることはありません。工場出荷時の IP アドレス以外のすべての設定と構成が変更されます。
スケジュールされたファイルのインポートは、コントローラがインポート時にオンラインである場合にのみ行われます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
コントローラーソフトウェアのアップロード
このスケジュールされたタスクは、コントローラーソフトウェアを、コントローラーに保存されているバージョンのソフトウェアにアップロードするために使用されます。
このスケジュールされたタスクは、ソフトウェアのライセンス認証ではなく、ソフトウェアのアップロードのみとなります。
プロパティ
パラメータ | 説明 |
|---|---|
タイトル | スケジュールされたタスクの名前を入力します。 |
説明 | スケジュールされたタスクの説明を入力します。 |
スケジュール
パラメータ | 説明 |
|---|---|
ON | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
Time (時間) | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
ソフトウェア更新
パラメータ | 説明 |
|---|---|
ファイル名 | [参照]を選択し、[ファイルを開く]を選択して、コントローラーソフトウェアファイルをアップロードします。 |
コントローラ
タスクをすべてのコントローラーに対してスケジュールする必要がある場合は[はい]を選択します。あるいは[いいえ]を選択して、ドロップダウンリストから必要なコントローラーを選択します。
タスクの実行後、結果は結果メニューに表示されます。
結果
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
データベースメンテナンス
コントローラー構成、ライブラリ、締め付けプログラム、装置設定、結果などのイベントが、データベースに以前保存されていたイベントに自動的に追加されます。容量を節約し、システムをより効率的にするためにデータベースをクリアするには、履歴データをを削除し、すべてのイベントの最新の結果のみを保持することができます。データベースメンテナンス機能では、すべてのイベントの最新結果の「スナップショット」を撮ることをスケジュールできます。
データのアーカイブ:はいを選択すると、データベースの履歴データを保存(アーカイブ)します。いいえを選択すると、スナップショットを撮るたびに履歴データが削除されます。撮影されたスナップショットの結果は毎回保存されます。
一度に定義できるデータベースメンテナンスタスクタイプのインスタンスは1つのみです。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
コントローラー構成のプッシュ
スケジュールされたタスクの種類がプッシュ・コントローラ構成に設定されている場合、メニューは目に見えます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
バックアップライセンスの配布
このスケジュールされたタスクは、定期的にライセンス配布のバックアップを作成するために使用されます。バックアップはToolsTalk2サーバーに保存され、ToolsTalk 2ライセンスのダウングレードが発生した場合、バックアップを使用して、予約されたライセンスでコントローラーを再度復元できます。
一度に定義できるバックアップライセンス配布タスクタイプのインスタンスは1つだけです。
ライセンス配布のバックアップタスクの設定
プロパティ
パラメータ | 説明 |
|---|---|
タイトル | スケジュールされたタスクの名前を入力します。 |
説明 | スケジュールされたタスクの説明を入力します。 |
スケジュール
パラメータ | 説明 |
|---|---|
有効 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
Time (時間) | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
バックアップの場所
パラメータ | 説明 |
|---|---|
ファイル名 | バックアップのファイル名を入力します。 |
結果
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
本セクション内
バックアップからのライセンス配布の復元
ToolsTalk2 ライセンスのダウングレードが発生した場合、ライセンス配布バックアップを使用して、ライセンス配布をコントローラに再度復元できます。復元は、最初にライセンス配布バックアップをダウンロードし、次にダウンロードしたバックアップをインポートすることによって実行されます。
ライセンス配布バックアップのダウンロード
[システム管理] タブ
を選択し、[スケジュールされたタスク] タブに移動します。ワークスペースで、[ライセンス配布のバックアップ] タスクをダブルクリックします。
[結果] で、復元するライセンス配布の、バックアップのダウンロードを選択します。
[名前を付けて保存]ダイアログで、ダウンロードの場所を参照し、[保存]を選択します。
ライセンス配布バックアップのインポート
ダウンロードしたファイルは、ライセンス配布のインポート機能を使用して、[機能管理システム] タブ からインポートできるようになります。
からインポートできるようになります。
関連情報
機能管理システム (FMS)
機能管理システムの導入
機能管理システム(FMS)を使用すると、アトラスコプコのお客様は、必要なときに動的なライセンススキームを通じて、必要な追加機能を使用できるようになります。
発注書を受け取った後24 時間以内に、アトラスコプコライセンスポータル(ACLP)のお客様のアカウントに購入された機能が自動的に届きます。これらの機能は、ライセンスファイルとしてダウンロードできます。
(使用許諾契約書に含まれる)この機能ファイルは、デコードされ配布できるローカルライセンスサーバー(LLS)にロードされます。
機能のプールが作成され、複数のコントローラー間で使用できます。所望する機能項目は、必要の際にコントローラーにアップロードでき、必要なくなった場合は、プールに戻すことができます。
アトラスコプコライセンスポータル(ACLP)で、すべての機能のあるアカウントを管理し、ライセンスサーバーへのライセンス付与、ライセンス返却が可能になります。
ACLP における顧客アカウントの作成と管理は、このマニュアルで扱っていません。
機能管理システムの定義
ライセンスの配信 | 機能 |
|---|---|
ローカルライセンスサーバー (LLS) | 機能項目のプールを持ち、機能項目をコントローラーのライセンスマネージャに配信できるユニット。 |
アトラスコプコのライセンスポータル (ACLP) | 希望する機能項目すべてを含むライセンスファイルを顧客に送信できるユニット。 |
ライセンス | 機能項目へのアクセス権限。ライセンスは、機能項目の使用方法の条件を示します。 |
ライセンスマネージャ | 機能項目を読み込み、管理し、返すコントローラーの機能。 |
仮想ステーションタイプ | その全てが仮想ステーションに割り当てられており、所定の機能をひとまとめにしたライセンス。ハンドヘルドシステム用。 |
同期機能 | その全てが仮想ステーションに割り当てられており、所定の機能をひとまとめにしたライセンス。固定式システム用。 |
バーチャルステーション機能 | TurboTight や TrueAngle など、個々のコントローラー機能のライセンス。 |
コントローラー機能 | コントローラー全体の機能 (Step Sync や Soft PLC など) のライセンス。これらはコントローラーごとに割り当てられ、そのコントローラー上の仮想ステーションに限定されません。 |
機能項目 | 追加機能を提供するために、コントローラーに読み込むことができるソフトウェアコード。使用条件はライセンス契約に示されています。 |
インテリジェントアプリケーションモジュール (IAM) | すべてのコントローラーのプログラム、構成、結果が含まれるストレージモジュール。特定のモジュールは、追加で読み込まれた機能項目も含む場合があります。 |
予約リスト | 配信サーバーには機能項目のプールがあります。その一部は、コントローラーに割り当てられ、一部は自由に配信できます。予約リストは、機能項目の配信方法に関する情報を含みます。 |
猶予時間 | ネットワーク接続されている配信環境で適用できます。コントローラーは LLS で定期的に確認し、機能項目を予約リストと同期する必要があります。 |
期限切れライセンス | コントローラー構成またはプログラムが変更されている可能性があり、読み込まれた機能項目と予約リストの内容の間に不一致が発生する可能性があります。その場合、コントローラーで期限が切れている機能項目が使用されていると、エラーイベントが表示されます。 |
機能ファイル | ACLP からダウンロードされるバイナリファイル。有効なすべての機能項目が含まれます。復号され、サーバーに保存されると、機能項目のプールはコントローラーに配信できるようになります。 |
ライセンスの種類と機能の配布の編集
使用可能なライセンスの種類と機能は、コントローラーから追加または削除できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。[カスタムセクション] フォルダを選択すると、コントローラーをフィルタできます。
特定のコントローラの 編集ボタン
 を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。
を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。各タブを選択して、コントローラで使用できるライセンスタイプまたは機能の数を入力します。
OKを選択して保存し、続行します。
機能項目の配布
機能管理システム(FMS)ワークスペースでは、ユーザーはローカルライセンスサーバー(LLS)に接続されToolsTalk 2 サーバーでオンラインのすべてのコントローラのラインセンスを管理できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。
次のビューと情報では、機能ファイルがアトラスコプコから受信され、LLS に読み込まれていることを仮定しています。
ライセンス配布の概要
ライセンス配布の概要は、いくつかのサブタブで構成されています。これらについては以下で説明します。
コントローラー
[コントローラー] サブタブには、コントローラー全体にわたるライセンス機能項目の分布が表示されます。より詳細な概要については、特定の行を選択して展開し、コントローラーの現在の機能を確認してください。
列 | 機能 |
|---|---|
編集 | コントローラに配布されるライセンスの数を編集します。 |
コントローラー | コントローラに発行された名前。 |
仮想ステーションの種類 | タイプごとの、各コントローラに配布されるライセンスの数量。 |
同期機能 | 各コントローラーに配布される固定式システムのライセンス数 (タイプ別)。 |
仮想ステーション機能 | 各コントローラーに存在する仮想ステーションレベルの機能。 |
コントローラ機能 | 各コントローラーに存在するコントローラーレベルの機能。 |
仮想ステーションの種類
[仮想ステーションの種類] サブタブには、コントローラー全体にわたるライセンスされた仮想ステーション機能タイプの分布が表示されます。
列 | 機能 |
|---|---|
仮想ステーションの種類 | ライセンスのタイプ。 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス機能タイプの数量。 |
利用可能 | コントローラに配布できるライセンス済み機能タイプの数量。 |
コントローラ上 | ライセンス機能タイプがアクティブになっているコントローラの数。 |
Reserved | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス機能タイプの合計。 |
同期機能
[同期機能] サブタブには、コントローラー全体のる固定式システムにおける、ライセンスされた同期機能項目の分布が表示されます。
列 | 機能 |
|---|---|
同期機能 | 機能の種類 |
コントローラー名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス済み機能項目の数量。 |
利用可能 | コントローラに配布できるライセンス済み機能項目の数量。 |
コントローラ上 | ライセンス済み機能項目が有効化されているコントローラの数。 |
予約済み | ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス機能タイプの合計。 |
仮想ステーション機能
[仮想ステーション機能] サブタブには、コントローラー間にわたるライセンスされた仮想ステーション機能項目の分布が表示されます。
列 | 機能 |
|---|---|
仮想ステーション機能 | 機能の種類 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス済み機能項目の数量。 |
利用可能 | コントローラに配布できるライセンス済み機能項目の数量。 |
コントローラ上 | ライセンス済み機能項目が有効化されているコントローラの数。 |
予約済み | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス済み機能項目の合計数。 |
コントローラ機能
[コントローラー機能] のサブタブには、コントローラ間にわたりライセンスされたコントローラー機能項目の分布が表示されます。これらはツールライセンスによって規定されます。
列 | 機能 |
|---|---|
コントローラ機能 | 機能の種類 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス済み機能項目の数量。 |
利用可能 | コントローラに配布できるライセンス済み機能項目の数量。 |
コントローラ上 | ライセンス済み機能項目が有効化されているコントローラの数。 |
予約済み | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス済み機能項目の合計数。 |
FMSポータブル
[FMS ポータブル] サブタブには、コントローラー全体にわたる FMS ポータブルデバイスの分布が表示されます。
列 | 機能 |
|---|---|
FMSポータブル | FMSポータブルデバイスのID番号。 |
コントローラ名 | コントローラに発行された名前。 |
FMSワークスペースの機能
コマンドボタン
コマンドボタン | 機能 |
|---|---|
管理 |
|
機能ファイルは、ライセンス項目を含むバイナリファイルです。ファイルはアトラスコプコのライセンスポータル (ACLP) で作成され、顧客側でダウンロードされます。配信サーバーに復号されると、機能のプールが作成され、次の 2 通りの方法でコントローラに配信されます。
ToolsTalk 2 ユーザーインターフェースで制御される、機能管理システムサーバーを使用するネットワーク接続されている配信システム。
各コントローラに挿入され、コントローラのユーザーインターフェースで管理される、セキュアな USB フラッシュドライブを使用する手動配信システム。詳細は、コントローラのマニュアルを参照してください。
一般情報
列 | 機能 |
|---|---|
ホスト ID | 機能ファイルが読み込まれる配信サーバーの固有の ID。 |
ToolsTalk2ライセンス | 現在の機能レベルの名称 |
ToolsTalk2 仮想ステーション | 構成済み仮想ステーションの数/構成に使用可能な仮想ステーションの総数 |
本セクション内
ライセンスの種類と機能の配布の編集
使用可能なライセンスの種類と機能は、コントローラーから追加または削除できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。[カスタムセクション] フォルダを選択すると、コントローラーをフィルタできます。
特定のコントローラの 編集ボタン
を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。各タブを選択して、コントローラで使用できるライセンスタイプまたは機能の数を入力します。
OKを選択して保存し、続行します。
ライセンス配布の管理
エクスポート: ToolsTalk2 サーバーは、最後に成功したライセンス配布状態の内部バックアップを自動的に保存します。このライセンス配布バックアップは、エクスポート機能を使用してシステムからエクスポートできます。
インポート:マージ操作としてライセンス配布をインポートします。ライセンスされたデバイスとそのライセンス配布をシステムに追加します。ライセンスされたデバイスがすでにシステム内のライセンス配布に表示されている場合、そのライセンス配布はインポートによって上書きされます。
復元:復元操作としてライセンス配布をインポートします。システム内のライセンス配布の状態は、インポートされたファイルの状態に置き換えられます。復元操作は、既存のライセンス配布を上書きします。
リセット: ローカルライセンスサーバー上のライセンス配布をリセットします。すべてのライセンス機能項目は、接続されているすべてのコントローラから取り消されます。
警告!生産が停止されるため、製造環境ではリセット機能を使用しないことを強く推奨いたします。
ライセンス配布のエクスポート
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
エクスポートタブを選択します。
エクスポートする場所を指定し、[エクスポート] を選択します。
ライセンス配布とライセンス配布の復元をインポートするには、ライセンスファイルが最初にアップロードされている必要があります。これにより、配布可能なライセンス数がシステムによって認識されます。
ライセンス配布のインポート
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
インポートタブを選択します。
インポートファイルの場所を参照し、[インポート] を選択します。
ライセンス配布の復元
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
復元タブを選択します。
復元ファイルの場所を参照し、[復元] を選択します。
警告!この操作により、既存の予約が削除され、ライセンス配布がインポートされたファイルの状態に復元されます。
ライセンス配布のリセット
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
[リセット] タブを選択し、契約条件の [リセット] チェックボックスをオンにして、[リセット] を選択します。
警告!生産が停止されるため、製造環境ではリセット機能を使用しないことを強く推奨いたします。
関連情報
ユーザーグループ
ユーザーグループの概要
この機能は、ToolsTalk 2 で管理者のユーザー権限を持つユーザーにのみ表示されます。
ToolsTalk 2 のユーザーグループ機能は、次の機能を提供します。
ユーザーグループの作成または削除。
フォルダとコントローラへのユーザーアクセス権限の割り当て。
コントローラ構成とパラメータ設定を変更するためのユーザー権限の割り当て。
ライブラリ機能を複数のコントローラと ToolsTalk 2 管理タスクに配信するためのユーザー権限の割り当て。
ユーザーグループを表示するには:
左のメニューバーでシステム管理
を選択します。上のメニューバーでユーザーグループ
 を選択します。
を選択します。
ワークスペースの表の各行は、異なるユーザー権限を指定できるユーザーグループを表します。
列には、左から右に、次の見出しがあります。
列 | 説明 |
|---|---|
チェックボックス | ユーザーグループの選択または選択解除。 |
名前 | ユーザーグループの名前。 |
説明 | オプションのフィールド。 |
AD グループ | Active Directory グループ名。IT 部門によって作成されます。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
表の一番上の行には管理者という名前が指定されています。このユーザーグループは削除できません。
コマンド | 説明 |
|---|---|
追加 | 新しいユーザーグループを作成します。ダイアログウィンドウが開きます。 |
Delete (削除) | グループ表から 1 つ以上のユーザーグループを削除します。 |
ユーザーグループの前提条件
ToolsTalk 2 では複数のユーザーグループを作成できます。各ユーザーグループに、ToolsTalk 2 でパラメータ、構成、フォルダを作成、読み取り、更新、削除するための異なるユーザー権限を指定できます。
会社の IT 分門のネットワーク管理者が 1 つ以上の Active Directory (AD) グループを作成する必要があります。AD グループは ToolsTalk 2 の 1 つのユーザーグループに割り当てることができます。ToolsTalk 2の各ユーザーグループには、固有のユーザー権限のセットが指定できます。
そのため、 ToolsTalk 2ユーザー権限のそれぞれの組み合わせに、1 つの AD グループを作成する必要があります。個別のユーザーは 1 つ以上の AD グループに割り当てられます。ユーザーグループのすべてのメンバーは、ToolsTalk 2 の同じユーザー権限を持ちます。
例えば、次の 4 つのグループを作成します。
-
ライン 1 のオペレーター。
-
ライン 1 のラインマネージャ。
-
工場生産エンジニア。
-
製品品質マネージャ。
個々のユーザーは 1 つ以上のグループに割り当てられます。
ToolsTalk 2 に 4 つのユーザーグループも作成します (同じグループ名を使用)。各ユーザーグループに 1 つの AD グループが割り当てられます。次のユーザー権限を作成します。
-
ライン 1 のオペレーター: ライン 1 からの締め付け結果のみを見ることができ、構成パラメータは変更できません。
-
ライン 1 のラインマネージャ: すべてのコントローラを見ることができ、ライン 1 のコントローラの構成パラメータを変更する追加のユーザー権限を持ちます。
-
工場生産エンジニア: ライン 1 とライン 2 の構成パラメータを変更できますが、すべての締め付け結果を見ることはできません。
-
製品品質マネージャ: 工場全体のすべての締め付け結果とイベントログを見ることができます。
ユーザーグループの作成、削除、編集
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
ユーザーグループを削除するには、チェックボックスを選択し
、削除をクリックします。ユーザーグループのユーザー権限を編集するには、表の行をダブルクリックします。ワークスペースに構成メニューが表示されます。
新しいユーザーグループを追加するには、追加をクリックします。グループの作成ポップアップウィンドウが表示され、次のパラメータを入力する必要があります。
ユーザーグループの名前。
オプションのユーザーグループの説明。
既存の AD グループの名前。
追加を選択して保存して、ウィンドウを閉じます。
ワークスペースウィンドウにユーザーグループの更新された表が表示されます。
列 | 説明 |
|---|---|
名前 | ユーザーグループのToolsTalk 2名。 |
説明 | オプションの情報フィールド。 |
AD グループ | Active Directory グループ名で、IT 部門で作成されます。ToolsTalk 2サーバーにアクセスするためのユーザー権限が必要な個別のユーザーを含みます。 |
有効 はい/いいえ | スーパー管理者の資格情報に対してのみ有効です。 この機能は、ユーザーグループを削除するのではなく、ダウングレード中にユーザーグループを無効にします。
アップグレード後に [有効] が [はい] に設定されていない場合、そのグループ内の特定のユーザーに対してクライアントは起動せず、「アプリケーションへのアクセス権がありません」という警告が表示されます。 |
ユーザーグループの権限メニュー
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、ユーザーグループを編集可能にします。
グループ権限メニューには、ユーザー権限を設定する 3 つのタブがあります。
列 | 説明 |
|---|---|
フォルダ | プラント構造のフォルダにアクセスし、変更するユーザー権限を割り当てます。 |
コントローラ | 選択したフォルダのコントローラにアクセスし、変更するユーザー権限を割り当てます。 |
グローバル機能 | ToolsTalk 2 のシステム管理者タスクとグローバルライブラリ機能を行うユーザー権限を割り当てます。 |
フォルダタブを選択し、ユーザーグループがアクセスできるフォルダを選択します。
フォルダが表示されていない場合、フォルダに含まれるコントローラにはアクセスできません。
コントローラタブを選択して、グループのコントローラに対するユーザー権限を選択します。
コントローラが表示されている場合、すべての構成とパラメータを読み取ることができます。
グローバル機能タブを選択し、ユーザーグループがアクセスできる ToolsTalk 2 のグローバル機能を選択します。
フォルダーのユーザー権限
ユーザー権限の最初のステップは、プラント構造 内のアクセスできるフォルダを割り当てることです。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
プラント構造にはすべてのコントローラという名前のフォルダがあります。このフォルダには、ToolsTalk 2 サーバーに接続されているすべてのコントローラがあります。
カスタマイズされているフォルダとサブフォルダを作成して、見やすくしたり、コントローラを論理的にグループ分けすることができます。
パラメータ | 説明 | 状態 |
|---|---|---|
すべてのフォルダで同じ権限 | ラジオボタン マークすると、選択されたユーザー権がプラント構造のすべてのフォルダ (新しいフォルダを含む) に適用可能になります。 | マークしない場合: プラント構造が変更されると、特定のフォルダのユーザー権限を更新する必要が生じる場合があります。 |
各フォルダに手動で権限を設定 | マークすると、選択されたユーザー権限がプラント構造の選択したフォルダのみに適用可能になります。 | |
読む | チェックボックス ユーザーグループはフォルダとその内容を見ることができます。 | マークしない場合: フォルダとその内容が、ユーザーグループに表示されません。 |
更新 | チェックボックス ユーザーグループは、コントローラとフォルダの間で移動、コピー、削除できます。 | |
作成 & 削除 | チェックボックス フォルダの作成 & 削除権限があると、ユーザーはフォルダ内にサブフォルダを作成し、削除できます。 すべてのコントローラフォルダの作成 & 削除権限があると、ユーザーは ToolsTalk 2 からコントローラを削除することもできます。 すべてのフォルダの作成 & 削除権限 (新しいフォルダを含む) があると、ユーザーは主要なフォルダを削除することもできます。 |
ユーザー権限のマークされていないフォルダは、プラント構造 のユーザーグループには表示されません。
フォルダの最小ユーザー権限は読み取りです。このレベルでは、フォルダが表示され、そのサブフォルダの内容とコントローラも表示されます。
コントローラが表示されている場合、少なくともその構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
コントローラのユーザー権限
ユーザー権限の 2 番目のステップは、プラント構造 でアクセス可能な選択されたコントローラに対するグループの権限を割り当てることです。
コントローラが表示されている場合、構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
パラメータ | 説明 | 状態 |
|---|---|---|
すべてのコントローラーで同じ権限(新しいコントローラーを含む) | ラジオボタン マークすると、選択されたユーザー権限がプラント構造のすべての表示されるコントローラ (新しいコントローラを含む) に適用可能になります。 | マークしない場合: 新しいコントローラが追加される場合など、プラント構造が変更されると、そのコントローラのユーザー権限を更新する必要があります。 |
各コントローラーに手動で権限を設定 | ラジオボタン マークすると、選択されたユーザー権限がプラント構造の選択したコントローラのみに適用可能になります。 | |
更新 | チェックボックス ユーザーグループのメンバーは、次が可能です。
| |
作成 & 削除 | チェックボックス 作成 & 削除ユーザーグループのメンバーの権限:
| |
| フォルダを開き、コンテンツを表示。 | |
| フォルダを閉じ、コンテンツを非表示。 | |
(X/Y) | マークされているフォルダの合計 Y 個のコントローラのうち、X 個のコントローラが選択されている権限を持つ |
ユーザー権限のマークされていないフォルダは、プラント構造 のユーザーグループには表示されません。
フォルダの最小ユーザー権限は読み取りです。このレベルでは、フォルダが表示され、そのサブフォルダの内容とコントローラも表示されます。
コントローラが表示されている場合、少なくともその構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
グローバル関数のユーザー権限
ユーザー権限の 3 番目のステップは、ToolsTalk 2のアクセスできるグローバル機能を割り当てることです。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
ユーザーグループにコントローラの作成 & 削除ユーザー権限レベルがある場合、すべてのコントローラ構成を作成し、編集することができます。
グローバル機能は ToolsTalk 2 の管理機能とライブラリ機能のグループで、左側のメニューにアイコンがあります。ユーザーグループには、グローバル機能の異なるユーザー権限を指定できます。
ある機能にユーザー権限が許可されていない場合、その機能にはユーザーはアクセスできず、アイコンはユーザーには表示されません。
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: レポート  | ||
結果  | 有効化 | マークすると、選択したコントローラの結果ワークスペースがユーザーグループに表示されます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
イベント | 有効化 | マークすると、選択したコントローラのイベントワークスペースがユーザーグループに表示されます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: システム管理  | ||
エクスポートとインポートのスケジュール | 有効化 | マークすると、ユーザーグループは、構成とパラメータのエクスポートとインポートをスケジュールするパラメータを表示し、構成することができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
コントローラソフトウェアとデータ管理 | 有効化 | マークすると、ユーザーグループは、選択したコントローラのソフトウェア更新を表示し、構成できます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
機能管理システム | 有効化 | マークすると、ユーザーグループはライセンスされた機能を管理し、選択されたコントローラからの機能の読み込みと削除ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
ユーザーグループ管理 | 有効化 | マークすると、ユーザーグループは、ユーザーグループのユーザー権限の表示と構成ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
プログラムの承認
| 有効化 | マークされている場合、ユーザーグループは承認のためにプログラムを送信したり、プログラムを承認または拒否したりできます。 マークされていない場合、アイコンはToolsTalk 2に表示されません。 |
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: ライブラリ  | ||
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 読む | マークすると、ユーザーグループは、ライブラリのパラメータの表示と構成ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 更新 | マークすると、ユーザーグループは、ライブラリのパラメータの表示と編集ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 作成 & 削除 | マークすると、ユーザーグループは、ライブラリの構成の作成、編集、削除ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 分配 | マークすると、ユーザーグループは、ライブラリの構成の作成、編集、削除ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 また、配信ユーザー権限のあるユーザーグループは、ライブラリ構成に登録されていないコントローラにグローバル構成を配信できます。 グローバル構成は、該当するコントローラで作成されます。 |
プログラムの承認
このセクションでは、プログラムの締め付けまたは緩めの承認プロセスについて説明します。プログラムの承認は、承認権限を持つユーザーによって管理されます。
関連情報
本セクション内
承認のためのプログラムの送信
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
承認のために送信する必要があるプログラムのチェックボックスをオンにします。
承認のために送信できるのは、コントローラにプッシュされたプログラムのみです。
[管理]を選択し 、[コメント]フィールドにコメントを入力した後、[承認のために送信]を選択します。
コメントセクションで許可される最大文字数は、スペースを含めて255文字です。
複数のプログラムを選択してコメントセクションにコメントを入力すると、選択したプログラムに該当する共通のコメントのみが表示されます。プログラムに該当するコメントの完全なリストを表示するには、プログラムを個別に選択します。
これで、システム管理
下にあるプログラムが [プログラムの承認] タブ に表示され、承認または却下される準備が整いました。
に表示され、承認または却下される準備が整いました。
締め付けプログラムをコピーして貼り付けると、承認ステータスはコピーされません。コピーされたプログラムのステータスは未定義になります。
関連情報
プログラム承認ワークスペース
システム管理
に移動して、プログラムの承認 を選択します。プログラム承認の概要には、プログラムの承認が保留されているコントローラのリストが表示されます。
展開するコントローラを選択し、プログラムの一覧を表示します。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスをオンにして、プログラムを選択します。 |
タイトル | 締め付けまたは緩めプログラムの名前。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | どのユーザーが最後に変更を加えたかを示します。 |
最終承認 | コントローラー時間で表される、プログラムに対する最後の承認。 |
最終承認者 | プログラムを最後に承認したユーザーを示します。 |
承認ステータス | プログラムの承認ステータス。 |
コメント | プログラムを承認のために送信するときにユーザーが追加したコメントを表示します。 サイズの制限により、ワークスペースにはいくつかのコメントのみが表示されます。追加されたすべてのコメントを表示するには、 [管理] -> [コメント]に移動します。コメントが多数ある場合は、スクロール可能なリストに表示されます。 |
本セクション内
承認ステータス
ステータス | 説明 |
|---|---|
承認済み | このプログラムは承認されており、コントローラーで使用できます。プログラムは読み取り専用になります。 |
下書き | プログラムは変更中/最適化中。確定後、プログラムは承認のために送信できます。プログラムは編集可能になります。 |
すべてのプログラムは、承認ステータスに関係なく使用できます。承認ステータスは、プログラムの動作機能に影響を及ぼしません。
プログラムが承認ワークフローに入ると、ステータスが必ず設定されます。
プログラムの承認または拒否
プログラム承認のユーザー権限を持つユーザーのみが、承認のために送信されたプログラムを承認または却下できます。この機能は、ライセンスレベルのラインマネージャーでのみ使用できます。
ユーザー権限は、 システム管理の [ユーザーグループ]タブで決定されます 。
システム管理
に移動して、プログラムの承認 を選択します。プログラム承認の概要には、プログラムの承認が保留されているコントローラーのリストが表示されます。
展開するコントローラーを選択し、プログラムの一覧を表示します。
承認/拒否するプログラムのチェックボックスをオンにします。
[管理]を選択し、[承認]または[拒否]を選択して、必要に応じて コメントフィールドにコメントを追加します。
コメントセクションで許可される最大文字数は、スペースを含めて255文字です。
承認、拒否、コメントの追加は、プログラム/複数のプログラムを選択して右クリックして実行することも出来ます。
承認と下書きへのリセットは、プログラム承認タブ、プラント構造、およびライブラリで実行できます。
コメント
コメントは、プログラムの承認または拒否時に追加できますが、次の方法で追加することもできます。
関連するプログラムを選択し、右クリックして[コメント]を選択します。
該当するプログラムを選択し、[管理] を選択し、続いて[コメント] を選択します。
コメントセクションで許可される最大文字数は、スペースを含めて255文字です。
複数のプログラムを選択してコメントセクションにコメントを入力すると、選択したプログラムに該当する共通のコメントのみが表示されます。プログラムに該当するコメントの完全なリストを表示するには、プログラムを個別に選択します。
構成承認の履歴
プログラムの承認履歴を見ることができます。
関連するプログラムを選択し、右クリックして[履歴]を選択します。
該当するプログラムを選択し、[管理] を選択し、続いて[履歴] を選択します。
構成承認の履歴ウィンドウが開き、プログラムが以前に承認されている場合は、次の情報が表示されます。
名称
最終承認
最終承認者
承認ステータス
コメント
すべてのコメントの履歴を含む[コメント]フィールドも表示されますが、編集できません。
関連情報
レポートと統計
このセクションでは、使用可能なレポートと統計情報について学習できます。
[結果]タブでの作業
ToolsTalk 2では、コントローラ GUI より詳細な締め付け結果を表示できます。
コントローラからの締め付け結果は、締め付けが終了すると同時にコントローラから ToolsTalk 2に自動的に送信されます。
コントローラには、締め付け結果をさらに処理し、統計分析するために ToolsNet 8 に送信するオプションもあります。
ToolsTalk 2 では、結果を表示して、一度に 1 つのコントローラからレポートを作成できます。各タスクは 1 つの結果として表示されます。単一の締め付けには、主要なパラメータを示す表、または締め付けグラフに結果が表示されます。バッチシーケンスは、実行された順番に個別の締め付けをすべて示します。
統計分析、結果のフィルタリング、締め付け分析は、ToolsNet 8 を使用して実行できます。この詳細については、ToolsNet 8 のマニュアルを参照してください。
アイコン | 説明 |
|---|---|
 | ワークスペースエリアに、選択されたコントローラの締め付け結果が表示されます。結果は表形式またはグラフィカルトレースで表示されます。 |
結果は、サーバーへのアクティブな接続がある間にのみ送信および表示できます。サーバーがオフラインの間に締め付けが実行された場合、これらの結果はこの期間中 ToolsTalk 2 に送信されません。
結果の処理
[最新結果]タブ - 最新の締め付けの結果を表示します。
[検索結果]タブ - [検索]ボタンを使用して、特定の日付間の結果を検索します。
固定タブ - 調査用。
締め付け結果は固定タブに一時的に保存されます。締め付けの詳細な分析に便利で、新しい結果の受信時に締め付け結果がウィンドウから欠落することを回避できます。
[ライブ結果]タブ - タスクが完了すると同時に、コントローラは ToolsTalk 2 に締め付け結果を送信し、結果がライブ結果の上部に追加されます。限定数の結果が保存できます。リストがいっぱいになると、最も古い結果がリストからなくなります。
[インポートされた結果] タブ - インポートした結果を表示します。
固定 - 調査のための保持エリア
締め付け結果は固定エリアに一時的に保存されます。締め付けの詳細な分析に便利で、新しい結果の受信時に締め付け結果がウィンドウから欠落することを回避できます。
手動:結果上でピンアイコン
 を選択します。
を選択します。締め付け結果は、調査のために固定エリアにコピーされます。一時記憶には複数の結果を固定できます。
自動:自動 PIN ドロップダウンメニューを選択して、固定する結果数を入力します。[スタート] を選択します。次の受信結果が自動的に固定され、入力された数に達するか、停止が押されるまで継続されます。
固定エリアからのすべての結果の削除
個別の結果を削除するには、ピンアイコン を選択して固定を解除します。
ライブ結果
タスクが完了すると同時に、コントローラは ToolsTalk に締め付け結果を送信し、結果が有効な結果の上部に追加されます。限定数の結果が保存できます。リストがいっぱいになると、最も古い結果がリストからなくなります。
リストの各行は 1 つのタスクを表し、これは選択されているタスクに応じて単一の締め付けやバッチシーケンスになります。リストを展開すると、各締め付けに関する詳細情報が表示されます。
矢印を使用して、概要結果を展開 してより詳細な結果ビューにするか、ビューを折りたたみ 、概要結果のみを表示します。

列 | 説明 |
|---|---|
赤のバー | ライブ結果 テーブルの一番左の場所に赤いバー のアイコンが含まれていることがあります。それは、エラーの迅速な識別のための、誤った締め付けであることを示しています。これは NG を示します。 |
固定ピン | 固定ピンアイコンを選択して、結果をピン留めタブに固定します。 |
トレース | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存アイコン | このコマンドは、トレースデータを含む .csv ファイルを作成します。ダイアログウィンドウが開き、ファイルを目的の場所に保存します。この場所から後ほどインポートすることが出来ます。 |
全体的なステータス | OK または NG。 NG は常に赤のバーアイコンと組み合わされ、エラーのある締め付けをすばやく確認できます。 不完全な締め付けには、結果の横に停止の言葉が表示されます。 |
タスクのタイプ | 実行されたタスクが単一の締め付けか、バッチシーケンスかを示します。 |
仮想ステーション名 | 仮想ステーションの名前。 |
スキャンシーケンス | タスクの選択にスキャナーが使用された場合、スキャンされたシーケンスが表示されます。それ以外の場合には、列は空白です。 |
タスク名 | 締め付けまたはバッチシーケンスの名前。 |
タイムスタンプ | 時間と日付の締め付けのタイムスタンプ。 |
結果パラメータ | 説明 |
|---|---|
トレース | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存 | このコマンドは、トレースデータを含む .csv ファイルを作成します。ダイアログウィンドウが開き、ファイルを目的の場所に保存します。この場所から後ほどインポートすることが出来ます。 |
ステータス | この列には OK または NG が表示できます。NG は、ToolsTalk 2 ユーザーインターフェースで常に赤のテキストと一緒に表示されます。 |
ステータス情報 | 追加の締め付け情報。 |
締め付け名 | 締め付けの名前。 |
トルク低制限 | 最終トルクを報告するステップモニタのピークトルクで設定される下限。 |
最終トルク | 締め付けのための最終トルク。このパラメータを報告するのは、最後の締め付けステップにあるステップモニタのピークトルク です。 |
目標トルク | [目標トルク] には、締め付け戦略用に構成された [目標トルク] の値が表示されます。この値は、締め付けを実行するために使用されます。 |
トルク高制限 | 最終トルクを報告するステップモニタのピークトルクで設定される上限。 |
ランダウン角度 | ランダウンが有効な場合は、結果にランダウン角度の値が表示されます。 |
角度低制限 | ステップモニタの角度で設定された下限で、最終角度を報告します。 |
最終角度 | 最後の締め付けステップの実際の測定角度です。この角度は、このパラメータを報告する最後の締め付けステップにあるステップモニタのピーク角度です。 |
目標角度 | [目標角度] には、締め付け方法用に構成された [目標角度] の値が表示されます。この値は、締め付けを実行するために使用されます。 |
角度高制限 | ステップモニタの角度で設定された上限で、最終角度を報告します。 |
TrueAngle 補正 | TrueAngle 補正は補正された角度を表示します。 |
開始最終角度 | [最終角度の開始] には、[最終角度] が開始された位置のトルク値が表示されます。 |
主要エラー | NG 結果の主要なエラー理由。 |
失敗ステップ | NG 締め付けの場合の、最初のエラーが検出されたステップの数を示します。 |
バッチ | タスクがバッチシーケンスの場合にのみ列が表示されます。 数字は、バッチシーケンス内のバッチの順番を示します。 |
バッチカウント数 | タスクがバッチシーケンスの場合にのみ列が表示されます。 数字は、バッチ内の締め付けの順番を示します。 |
角度とトルクの結果 | 数値。目標値または制限値として使用される場合にのみ表示されます。 |
エラー | すべてのエラーを示します。 |
経過時間 | 締め付けの開始から終了までの時間。 |
詳細な状態 | NG 結果には、エラーの追加情報が示されます。 |
結果レポーター
リストには、結果レポーターから得られた値が表示されます。プログラムのモニター/制限に対して定義された結果レポーターがある場合、そのモニター/制限からの値が報告されます。プログラムモニター/制限に対して定義された結果レポーターがない場合、レポーターのあるメインパスで最後に実行されたステップからの値が報告されます。
マルチステップのモニター/制限結果
マルチステップ締め付けプログラムの各ステップはデータを報告します。このほとんどは、ステップ中に有効なモニターと制限からのデータなので、正しいタイプのモニターまたは制限が構成されている場合にのみデータが報告されます。
ステップ結果パラメータ | 説明 |
|---|---|
ステップ | ステップ数。 |
ステータス | ステップのステータス、OK または NG。 |
ステップタイプ | マルチステッププログラムのステップタイプ。 |
ステップカテゴリ | 各ステップに、ステップカテゴリを選択するオプションがあります。これらのカテゴリはカスタマイズできます。ステップカテゴリを選択すると、NG 締め付けが、関連する詳細ステータスと該当するマルチステップエラー情報を示してイベント結果ビューにリスト表示されます。選択しないと、削除されたステータスは「未分類マルチステップエラー」に設定されます。 |
主要エラー | NG 結果の主要なエラー理由。 |
経過時間 | 締め付けの開始から終了までの時間。 |
エラー | すべてのエラーを示します。 |
トレース
結果で、有効になっている場合はトレースアイコンをクリックします。 。次に結果グラフが表示されます。複数のトレースを選択して、同時に表示できます。
。次に結果グラフが表示されます。複数のトレースを選択して、同時に表示できます。
トレース ワークスペースには、1 つ以上の締め付け結果の詳細なグラフィック情報が表示されます。
ワークスペースで、マウスホイールを使用して拡大または縮小します。ズームインするエリアを選択することもできます。トレース領域をダブルクリックして戻ります。
例:
拡大する領域の選択:
トレースを移動するには、マウスのホイールボタンを押します。

トレースグラフでは、選択した軸タイプに基づくデルタ情報を表示できます。比較する 2 つの点を右クリックして、それらの間のデルタを表示します。ポイントをドラッグしてターゲットを変更します。
デルタをドラッグして移動するか、削除キーを押して削除します。
トレース設定 | 説明 |
|---|---|
限界 | 締め付けプログラムでトルク制限または角度制限が使用されている場合、トルク制限と角度制限を選択して表示できます。限界値を表示するには、対角度トルクのトレースを選択する必要があります。 締め付けプログラムでポストビュートルクが設定されている場合、ポストビュートルク制限を選択して表示することができます。 |
チャート | 締め付けトレースビューに表示するグリッドラインと軸ラベルを選択できます。 |
最小/最大 | 選択すると、最小または最大の測定値が表示されます。 |
| X軸| | 選択すると、X 軸の絶対値が表示されます。 |
Y1 | Y1 軸に表示する情報を選択します:
|
Y2 | Y2 軸に表示する情報を選択します:
|
Y3 | Y3 軸に表示する情報を選択します:
|
X | X 軸に表示する情報を選択します:
|
トレースは、さまざまなオプションでX軸オフセットによって同期できます。トレースの同期は、2つ以上のトレース結果が選択されている場合に使用できます。
同期オプション | 説明 |
|---|---|
なし | トレースにオフセットは設定されていません |
手動 | (2つのトレース結果が選択されている場合にのみ使用可能) |
ピーク | トレースを絶対ピーク値で同期します。 |
設定値 | 特定の値でトレースを同期します。
|
測定点 | 特定の測定点でトレースを同期します。
|
ボタン | 説明 |
|---|---|
すべてのΔを削除 | すべてのデルタを削除します。 |
エクスポート... | トレースチャートビューを次のターゲットにエクスポートします。:
|
すべて削除 | このボタンはトレースプロットエリアをクリアします。 |
結果の検索
検索機能を使用して、特定の日付の間の結果を検索します。
[結果] タブ
に移動します。サブタブの検索結果を選択します。
[検索...] ボタンを選択して、[結果の検索設定] ダイアログを開きます。
[日付範囲] で、カレンダーの開始日と終了日、またはドロップダウンから事前定義された範囲を選択します。準備ができたら[検索]を選択します。
検索結果は、さらなるアクションや分析のために、サブタブの [検索結果] に表示されます。
コントローラを切り替えると、[検索結果] サブタブの結果がクリアされます。
結果のフィルタリング
結果は、ステータス、仮想ステーション、タスクおよび自由書式のテキストでフィルタリングできます。
[結果] タブ
に移動します。結果のサブタブを選択します。
ライブ結果はフィルタリングできません。
結果リストの下にあるナビゲーションパネルから、フィルタリング条件を選択して、ビュー内の結果をフィルタリングします。
自由書式のテキストでは、仮想ステーションとタスクの名前を検索します。
フィルタリングされた結果が表示されます。
結果のエクスポート
スプレッドシートにエクスポートするには、ソースとエクスポートする結果の数を選択します。1つ以上の締め付けからすべての詳細をエクスポートすることができます。
エクスポートボタンを選択します。
エクスポート元を次から選択します。
最新からのエクスポート: 最新の受信した結果から選択された量の結果をエクスポートします。
固定からのエクスポート: 一時記憶域から選択された量の結果をエクスポートします。
コントローラからのエクスポート: 選択された量の結果をコントローラからエクスポートします。
結果の量: エクスポートする結果数 (量) を入力します。結果はリストの一番上から下に取られます。
エクスポートを選択します。
保存先を選択するダイアログボックスが開きます。
保存 を選択します。
結果のインポート
インポートボタンを選択します。
ダイアログ ウィンドウで、インポートする .csv ファイルを選択します。
開くを選択します。
インポートされたトレースが [インポート済み] タブのリストに追加されます。
同期締め付けの結果
締め付け結果は、さらに分析するために個別またはまとめて選択できる縮小版リストに表示されます。
各コントローラについて、最大 1024 個の最新の結果を ToolsTalk データベースに保存できます。コントローラがオフラインのとき、オフライン中に発生した結果は、コントローラがオンラインに戻ったときにToolsTalkに転送されません。
NG ステータスの結果のみを表示するには、各ページの下部で NG 結果のみ表示を選択します。
最上位レベルでは、複数のチャンネルを使用した同期締め付けの結果には、次の情報が含まれます。
締め付け結果
GUIパーツ | 説明 |
|---|---|
赤のバー | ライブ結果テーブルの左端に赤いバーアイコンが表示される場合があります。これは誤った締め付けと共に示され、エラーを迅速に特定できます。これは NG を示します。 |
ピンを押さえる | 固定ピンアイコンを選択して、結果をピン留めタブに固定します。 |
トレースアイコン | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存アイコン | このコマンドは、結果データを含む .csv ファイルを作成します。ダイアログウィンドウが開き、ファイルを目的の場所に保存します。 |
シャント校正 | シャント校正が表示されている場合に表示されます。 |
全体的なステータス | 締め付けの合計ステータス、OK または NG。 |
タイプ | |
仮想ステーション名 | 仮想ステーションの名前。 |
Sync Modeのインデックスと名前 | 締め付けに使用されるSync Modeのインデックスと名前。 |
タイムスタンプ | 時間と日付の締め付けのタイムスタンプ。 |
チャンネル結果
各チャンネルについて、全体的な結果が次の内容で報告されます。
GUIパーツ | 説明 |
|---|---|
トレース | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存 | このコマンドは、結果データを含む csv ファイルを作成します。指定する場所でファイルを保存するためのポップアップダイアログウィンドウが開きます。 |
ボルト名 | ボルトの番号と名前。Sync Mode >「Sync Mode名」> ボルトの構成 > ボルトとボルト名 で設定します。 |
ステータス | 締め付けの合計ステータス、OK または NG。 |
ステータス情報 | ステータス情報 |
プログラム | 締め付けプログラム。締め付けとマルチステッププログラム >「締め付けプログラム名」> 基本設定 > 名前 で設定します。 |
チャンネル | チャネル番号。 |
目標角度 | [目標角度] には、締め付け方法用に構成された [目標角度] の値が表示されます。この値は、締め付けを実行するために使用されます。 |
最終角度 | 最後の締め付けステップの実際の測定角度です。この角度は、このパラメータを報告する最後の締め付けステップにあるステップモニタのピーク角度です。 |
最終トルク | 締め付けのための最終トルク。このパラメータを報告するのは、最後の締め付けステップにあるステップモニタのピークトルク です。 |
目標トルク | 目標トルク。 |
経過時間 | 締め付けの開始から終了までの時間。 |
型式 | モード名/番号 |
シャント校正 | シャント校正データを表示するには、このアイコンを選択します。 |
ステップ結果
マルチステップ締め付けプログラムの各ステップはデータを報告します。このほとんどは、ステップ中に有効なモニターと制限からのデータなので、正しいタイプのモニターまたは制限が構成されている場合にのみデータが報告されます。
修復が行われた場合、同じ手順を複数回実行できます。
結果パラメータ | 説明 |
|---|---|
ステップ番号 | ステップ数。 |
ステータス | ステップのステータス、OK または NG。 |
ステップタイプ | マルチステッププログラムのステップタイプ。 |
パス | プログラム内のどこにステップがあるかを示します。つまり、ステップが締め付けパス、修復、または終了パスのどこにあるかを示します。 |
ピークトルク | 内部破断時に発生するトルクを含む測定された最終トルク。通常、ピークトルクはシャットオフトルクよりも高くなります。 |
経過時間 | 締め付けの開始から終了までの時間。 |
角度 | 角度を表示します |
クリック音を鳴らすトルク | クリックトルクを表示します |
クリック音を鳴らす角度 | クリック角度を表示します |
結果レポーター
リストには、結果レポーターから得られた値が表示されます。プログラムのモニター/制限に対して定義された結果レポーターがある場合、そのモニター/制限からの値が報告されます。プログラムモニター/制限に対して定義された結果レポーターがない場合、レポーターのあるメインパスで最後に実行されたステップからの値が報告されます。
トレース
結果で、有効になっている場合はトレースアイコンをクリックします。。次に結果グラフが表示されます。複数のトレースを選択して、同時に表示できます。
トレース ワークスペースには、1 つ以上の締め付け結果の詳細なグラフィック情報が表示されます。
ワークスペースで、マウスホイールを使用して拡大または縮小します。ズームインするエリアを選択することもできます。トレース領域をダブルクリックして戻ります。
例:
拡大する領域の選択:
トレースを移動するには、マウスのホイールボタンを押します。
トレースグラフでは、選択した軸タイプに基づくデルタ情報を表示できます。比較する 2 つの点を右クリックして、それらの間のデルタを表示します。ポイントをドラッグしてターゲットを変更します。
デルタをドラッグして移動するか、削除キーを押して削除します。
トレース設定 | 説明 |
|---|---|
限界 | 1つの曲線が表示されている場合、このボックスをオンにすると、締め付けプログラムで使用されている場合は限界値を表示できます。 |
グリッド線 | このチェックボックスをオンにすると、結果グラフにグリッド線が表示されます。 |
最小/最大 | 最小または最大の測定値を表示します。 |
| X軸| | X 軸の絶対値を表示します。 |
Y1 | Y1 軸に表示する情報を選択します。
|
Y2 | Y2 軸に表示する情報を選択します。
|
Y3 | Y3 軸に表示する情報を選択します。
|
X | どの情報をX軸に表示するかを選択します。
|
トレースは、さまざまなオプションでX軸オフセットによって同期できます。トレースの同期は、2つ以上のトレース結果が選択されている場合に使用できます。
同期オプション | 説明 |
|---|---|
なし | トレースにオフセットは設定されていません |
マニュアル | (2つのトレース結果が選択されている場合にのみ使用可能) |
ピーク | トレースを絶対ピーク値で同期します。 |
設定値 | 特定の値でトレースを同期します。
|
測定点 | 特定の測定点でトレースを同期します。
|
ボタン | 説明 |
|---|---|
すべてのΔを削除 | すべてのデルタを削除します。 |
エクスポート... | トレースチャートビューを次のターゲットにエクスポートします。:
|
すべて削除 | このボタンはトレースプロットエリアをクリアします。 |
最新の結果タブ
最新の締め付けの結果を表示します。
検索結果タブ
特定の日付間の結果を検索するには、[検索] ボタンを使用します。
調査用の固定タブ
締め付け結果は固定タブに一時的に保存されます。締め付けの詳細な分析に便利で、新しい結果の受信時に締め付け結果がウィンドウから欠落することを回避できます。
ライブ結果タブ
タスクが完了すると同時に、コントローラは ToolsTalk 2 に締め付け結果を送信し、結果が有効な結果の上部に追加されます。限定数の結果が保存できます。リストがいっぱいになると、最も古い結果がリストからなくなります。
インポート済みタブ
インポートした結果を表示します。
[イベント]タブの使用
コントローラーイベントは、サブメニューの[イベント]の[設定]タブで行われた構成に従って表示されます。
コントローラによってログに記録されたイベントは、[イベント] タブの一覧に表示できます。
イベントリストには記録されたイベントのみが表示されます。
コントローライベントの表示
プラント構造
でコントローラを選択します。 [イベント]
タブに移動します。
ワークスペースエリアには、締め付け結果のさまざまなビューと詳細を表示するための一部のオプションがあります。
列 | 説明 |
|---|---|
重要度 | 重要度はアイコンによって識別されます:
|
日時 | コントローラ時間で表される、イベント発生時のタイムスタンプ。 |
コード | イベントコード ID。 |
説明 | イベントコードの説明。 |
詳細 | イベントの詳細。 |
仮想ステーション | 仮想ステーション名。 |
グループ | システムの説明。 |
関連情報
本セクション内
重大度のタイプ
イベントは、情報、警告、エラーの 3 つのカテゴリに分類されます。
情報イベント
情報イベント は、ユーザーまたはシステムによって実行されたアクションで発生した注意すべきイベントを通知します。情報イベントは、特定のユーザーアクションを必要としません。
は、ユーザーまたはシステムによって実行されたアクションで発生した注意すべきイベントを通知します。情報イベントは、特定のユーザーアクションを必要としません。
警告イベント
警告イベントは、システムのパフォーマンスに影響を与えるか、損傷を招く可能性のある潜在的に深刻な状態を知らせます。
エラーイベント
エラーイベントは、継続するために、ユーザーがセットアップや構成を変更する必要がほぼ全面的ある、サービス障害のような深刻な状態を知らせます。
[統計]タブの操作
PF6000およびPF8にのみ有効です。
ToolsTalk 2はコントローラーの統計プロセス制御(SPC)構成と、チャートに関する統計計算から得られたSPC結果データの表示を処理する。SPC機能を提供します。統計計算はコントローラーで実行され、結果はToolsTalk 2 クライアントでのプレゼンテーション用にToolsTalk 2 に提供されます。
コントローラー内でSPC機能を設定することにより、外部ソフトウェアを必要とせずに、コントローラー上で直接作業を簡素化して実行することができます。チャートデータはコントローラーで生成されます。
統計計算は、コントローラーに保存されている締め付け結果に基づきます。
統計計算は、特定の仮想ステーションに対して選択および使用された締め付けプログラムに応じて、仮想ステーションレベルで実行されます。
SPCパラメータの構成
[プラント構造] ワークスペース
でコントローラーを選択。メニューバーにある [統計] を選択します。
を選択します。[構成]セクションで、次のパラメーターを入力して、統計計算の締め付け結果を選択する方法を指定します:
変数の構成 情報
説明
サブグループの数
統計計算の基となるサブグループの数。
サブグループサイズ
各サブグループのサンプル数 (締め付け結果)。サブグループサイズの範囲は2〜25です。
頻度
サブグループ間の間隔。
頻度は、サブグループサイズ以上である必要があります。結果の総数(サブグループの数×頻度)は、2から500の範囲になります。
たとえば、頻度が8でサブグループサイズが5の場合、最初の5つのデータ(結果)がサブグループに使用されます。頻度 = 8であるため、次のサブグループは8番目以降のデータ(結果)の検討を開始し、以下同様にループします。
SPC変数の構成
[プラント構造] ワークスペース
でコントローラーを選択。メニューバーにある [統計] を選択します。「変数の構成」セクションには、変数の構成のリストが含まれています。
変数の構成を作成するには、セクションの右上隅にある[追加...]を選択します。
変数の構成を削除するには、構成を選択し(複数の構成を選択することもできます)、セクションの右上隅にある[変更] > [削除]を選択します。
変数の構成を更新するには、構成をダブルクリックします。
情報 | 説明 |
|---|---|
タイトル | 変数の名前。 |
仮想ステーション | 締め付け結果が生成される仮想ステーション。 |
締め付けプログラム | 変数のマルチステップ締付けプログラム。 締め付けプログラムはマルチステッププログラムである必要があります。 |
監視 | 計算で監視する締め付け結果の側面を選択します:
ユーザーが結果レポーターを使用する場合、次のモニター値に影響を与える可能性があります。最終トルクおよび最終角度。 |
ステップ番号 | ステップ数を指定します。 |
次の制限を設定します:
情報 | 説明 |
|---|---|
許容誤差の下限 | 監視値の許容誤差の下限。Cp値、Cpk値の計算、およびSPC結果チャートでの許容限界のレンダリングに使用されます。 |
許容誤差の上限 | 監視値の許容誤差の上限。Cp値、Cpk値の計算、およびSPC結果チャートでの許容限界のレンダリングに使用されます。 |
情報 | 説明 |
|---|---|
Cp | プロセス能力。プロセスの広がりが許容幅内にある回数(許容誤差の上限-許容誤差の下限)。Cpの値が高いほど、プロセスは良好です。 |
Cpk | 位置に合わせて修正されたプロセス能力。プロセス設定が許容誤差の中央を基準にして中央から大きく外れている場合、高いCp指数を持つことは有用ではありません。したがって、Cpk指数が高いということは、許容幅に対して小さな広がりで良好なプロセスがあり、その幅内で中央位置に良好に配置されていることを意味します(許容誤差の上限-許容誤差の下限)。CpkがCpと等しい場合、プロセスは許容範囲のちょうど中央で生成されるように設定されています。 |
情報 | 説明 |
|---|---|
自動計算 | オンに設定すると、管理限界が自動的に計算されます。
|
制御上限 | 計算されたサブグループ値の制御上限。SPC結果チャートでの制限レンダリングに使用されます。 |
制御下限 | 計算されたサブグループ値の制御下限。SPC結果チャートでの制限レンダリングに使用されます。 |
統計情報の計算
[プラント構造] ワークスペース
でコントローラーを選択。メニューバーにある [統計] を選択します。[構成]セクションで、コントローラーに保存された結果を収集するためのパラメーター(サブグループの数、サブグループのサイズ、および頻度)を入力します。
変数の構成]セクションでは、計算する変数の構成をダブルクリックします。
変数の構成ページで、右上隅にある[計算]を選択します。
統計計算が完了すると、結果はWeb HMIとToolsTalk 2に送信されます。
計算が無効になっている場合は、次を確認します:
コントローラがオンラインであること。
SPC構成がコントローラーと同期していること。
ユーザーにコントローラーを更新する権限があること。
削除された締め付けプログラムまたは仮想ステーションからの結果の統計を計算することはできません。ただし、結果がコントローラに格納されている場合を除きます。
統計の式
サブグループ内のデータは、次のように計算されます:
平均:
範囲= R = max(X i )-min(X i )、ここで i = 1 ... n
サブグループの標準偏差:
標準偏差の全体の合計:
ここで、N = 観測値の総数。
計算に使用するサブグループの指定数が収集されると、SPC関数は計算を開始し、統計の安定性を判断します。
計算は、次の手順で実行されます:(m = サブグループの数)
平均値の平均の計算:
範囲の平均の計算:
標準偏差の平均の計算:
シグマに関するプロセス能力CpおよびCpkの計算:
ここで、
 は、観測された特性値の全体的な算術平均です。
は、観測された特性値の全体的な算術平均です。UTLは許容誤差の上限です。
LTLは許容誤差の下限です。
シグマ推定は、サブグループ内の平均平方標準偏差です。
範囲に関するプロセス能力CpおよびCpkの計算:
正規分布の場合、 su = sl = 3です。
[SPC構成]セクションで[自動計算]スイッチが[はい]に設定されている場合の管理限界の計算:
X-bar R(平均)

X-bar R(範囲)

X-bar S(平均)
X-bar S(シグマ)
A2、A3、D3、D 4、B3、およびB4は定数です(詳細については、「SPC計算定数」の段落を参照してください)。
SPC計算定数
サブグループサイズ | 標準偏差推定のための除数 | 管理限界係数 | |||||
|---|---|---|---|---|---|---|---|
Xbar R | Xbar S | ||||||
A2 | D3 | D4 | A3 | B3 | B4 | ||
n | d2 | ||||||
2 | 1.128 | 1.880 | - | 3.267 | 2.659 | - | 3.267 |
3 | 1.693 | 1.023 | - | 2.574 | 1.954 | - | 2.568 |
4 | 2.059 | 0.729 | - | 2.282 | 1.628 | - | 2.266 |
5 | 2.326 | 0.577 | - | 2.114 | 1.427 | - | 2.089 |
6 | 2.534 | 0.483 | - | 2.004 | 1.287 | 0.030 | 1.970 |
7 | 2.704 | 0.419 | 0.076 | 1.924 | 1.182 | 0.118 | 1.882 |
8 | 2.847 | 0.373 | 0.136 | 1.864 | 1.099 | 0.185 | 1.815 |
9 | 2.970 | 0.337 | 0.184 | 1.816 | 1.032 | 0.239 | 1.761 |
10 | 3.078 | 0.308 | 0.223 | 1.777 | 0.975 | 0.284 | 1.716 |
11 | 3.173 | 0.285 | 0.256 | 1.744 | 0.927 | 0.321 | 1.679 |
12 | 3.258 | 0.266 | 0.283 | 1.717 | 0.886 | 0.354 | 1.646 |
13 | 3.336 | 0.249 | 0.307 | 1.693 | 0.850 | 0.382 | 1.618 |
14 | 3.407 | 0.235 | 0.328 | 1.672 | 0.817 | 0.406 | 1.594 |
15 | 3.472 | 0.223 | 0.347 | 1.653 | 0.789 | 0.428 | 1.572 |
16 | 3.532 | 0.212 | 0.363 | 1.637 | 0.763 | 0.448 | 1.552 |
17 | 3.588 | 0.203 | 0.378 | 1.622 | 0.739 | 0.466 | 1.534 |
18 | 3.640 | 0.194 | 0.391 | 1.608 | 0.718 | 0.482 | 1.518 |
19 | 3.689 | 0.187 | 0.403 | 1.597 | 0.698 | 0.497 | 1.503 |
20 | 3.735 | 0.180 | 0.415 | 1.585 | 0.680 | 0.510 | 1.490 |
21 | 3.778 | 0.173 | 0.425 | 1.575 | 0.663 | 0.523 | 1.477 |
22 | 3.819 | 0.167 | 0.434 | 1.566 | 0.647 | 0.534 | 1.466 |
23 | 3.858 | 0.162 | 0.443 | 1.557 | 0.633 | 0.545 | 1.455 |
24 | 3.895 | 0.157 | 0.451 | 1.548 | 0.619 | 0.555 | 1.445 |
25 | 3.931 | 0.153 | 0.459 | 1.541 | 0.606 | 0.565 | 1.435 |
統計結果の表示
[プラント構造] ワークスペース
でコントローラーを選択。メニューバーにある [統計] を選択します。統計を計算した後、統計結果を[結果]タブに表示できます。
統計結果は、異なるチャートごとに表示されます:統計結果は、異なるチャートごとに表示されます。ヒストグラム、 XBAR-R、 XBAR-S。統計結果はコントローラーまたはToolsTalk 2 に保存されませんが、ToolsTalk 2コントローラごとに最大10個の最新の統計結果をメモリに保持します。
ヒストグラム
ヒストグラムチャートは、目標、正規分布曲線、および多数の制限とともに、多数のクラスの監視対象アスペクトの頻度を示します。
ヒストグラムは一連のバーであり、それぞれの幅はクラス内の値の範囲に比例し、高さはクラスに含まれるサンプルの数に比例します。ヒストグラムは、プロセスがその中に持つ変数の数を明らかにします。ヒストグラムは、表では容易に識別できない傾向を強調し、明確にするため、便利です。
凡例項目 | 説明 |
|---|---|
正規分布 | サンプル収集から計算されたガウス曲線。統計計算と確率に基づいて、サンプルの理論的分布を示します。 |
平均 | サンプル収集の全体的な平均値。 |
+/- 3シグマ | 正規分布の定義の一部であり、サンプル収集の99.7%が平均値から+/- 3標準偏差の間であると予想されることを示しています。 |
目標 | 締め付けプログラムの目標値。 |
許容誤差限界値 | SPC変数構成で定義されます。 |
XBar-R
XBar-R管理図には、各サブグループの平均値(XBar)と範囲(R)の両方が表示されます。これは、離散値または連続値を使用する最も一般的なタイプの管理図です。グラフのXBar部分はプロセスの平均値の変化を示し、R部分はプロセスの分散の変化を示します。
このチャートは、プロセスの平均値の変化と分散を同時に示し、プロセス内の異常をチェックするための非常に効果的な方法となるため、特に有用です。
凡例項目 | 説明 |
|---|---|
平均 | サンプル収集の全体的な平均値。 |
制御限界 | SPC変数構成で定義されます。自動計算または手動計算が可能です。 |
目標 | 締め付けプログラムの目標値。 |
中心線 | サブグループの平均範囲。 |
XBar-S
XBar-S管理図には、各サブグループの平均値(XBar)と標準偏差(S)の両方が表示されます。
XBAR-S管理図は、Xbar-Sが範囲の代わりに標準偏差を示していることを除いて、Xbar-R管理図と同じです。
凡例項目 | 説明 |
|---|---|
平均 | サンプル収集の全体的な平均値。 |
制御限界 | SPC変数構成で定義されます。自動計算または手動計算が可能です。 |
目標 | 締め付けプログラムの目標値。 |
中心線 | サブグループの平均範囲。 |
計算統計値
多数の計算された統計キー値は、ヒストグラム、 XBar-Rチャート、およびXBar-Sチャートの下の情報ボックスに表示されます。
計算された統計値は次のとおりです:
最小 = 収集されたすべてのサンプル値の最小値
最大 = 収集されたすべてのサンプル値の最大値
平均 =
平均 + 3シグマ =
+ 3 * 標準偏差平均 - 3シグマ =
- 3 * 標準偏差Cp(XBar-R管理図では 、値は範囲に基づいており、 XBar-S管理図では値はシグマに基づきます)
Cpk(XBar-R管理図では 、値は範囲に基づいており、 XBar-S管理図では値はシグマに基づきます)
中心線 = 範囲内部分
 、およびシグマ部分
、およびシグマ部分 
目標(利用可能な場合はモニターの目標値)
標準偏差 = 全体の標準偏差 = 標準偏差
コントローライベント通知の追加
このセクションでは、さまざまなコントローライベントの通知を有効にする方法について説明します。特定のコントローライベントの通知を受信する場合は、 [設定]メニューの[イベント]サブタブで、それらのイベントの[ログ]と[表示]チェックボックスをオンにする必要があります。
ワークスペース の右上隅にある
を選択します。[ToolsTalk 2ユーザー設定]ダイアログボックスで、すべての通知をオフにするか、次の通知を有効にするかを選択できます:
すべて表示
エラーと警告を表示
エラーのみを表示
[保存]して[閉じる]を選択します。
設定/イベントメニューで有効になっている(ログと表示のボックスがチェックされている状態)コントローライベント、およびToolsTalk 2ユーザー設定で選択された値(エラー、警告、またはその両方)に基づいて、接続されているコントローラから受信したすべてのイベントはコントローライベント通知ウィンドウで、それらを受信する都度表示されます。
リストでコントローラを選択して展開し、そのコントローラに関連するすべての通知を表示します。
各通知には、次の値が記載されています:
アイテム
説明
重要度
重要度はアイコンによって識別されます:
- - エラー
- - 警告
- - 情報
コード
イベントコード ID。
説明
イベントコードの説明。
日時
コントローラ時間で表される、イベント発生時のタイムスタンプ。
グループ
システムの説明。
トラブルシューティングおよびサービス
このセクションでは、問題が発生した場合のトラブルシューティングを支援し、製品の保守とサービスに役立つ情報を提供します。
インストール中のトラブルシューティング
<meta-ref type="dynamic" name="AC.ITBA.Variable.product_name__1">ToolsTalk 2</meta-ref> のアップグレード後、ToolsTalk Industrial Technique Host service を再起動します。
エラー | ソリューション |
|---|---|
エラーコード1920 スタートに失敗しました。アクセス権があることを確認してください。 | データベース認証エラーSQL データベースでは混合モードの認証を構成する必要があります。 SQL 管理スタジオを使用して認証を修正する必要があります。再度のインストールを試行する前にコンピューターを再起動する必要があると思われます。 |
InstallShield ウィザードは、インストールファイルの使用時に既にインストールがされているかどうかを検出します。コンピューターに古いインストールが存在する場合、検出されない場合もあります。
そのため、新たなインストールの開始前に、プログラムとデータベース カタログの古いインスタンスの削除を行うことが推奨されます。
起動時のトラブルシューティング
エラー | ソリューション |
|---|---|
アプリケーションは起動するが、目的のコントローラーが表示されない。 | コントローラー ネットワーク接続が正しくない。 コントローラーが工場ネットワークに正しく接続されていることを確認します。 ネットワーク接続が使用されている場合に該当します。 |
アプリケーションは起動するが、目的のコントローラーが表示されない。 | ToolsTalk 2 へのコントローラー構成が正しくない。 コントローラー構成ポイントから正しい ToolsTalk 2 サーバーへのサーバー接続 を確認します。 |
ToolsTalk 2 が起動したときにエラーメッセージ「ネットワーク接続が失われたか、サーバーが使用できません」が表示される。 | クライアント アプリケーションがサーバーアプリケーションに正しく接続されていない。 サーバーアプリケーションが起動したかどうかを確認します。 アプリケーションは自動的に起動するはずです。起動しない場合、アプリケーションを削除(アンインストール)してアプリケーションを再インストールすることが考えられます。 |
関連情報
参考
このセクションでは、さまざまな有用な情報を見つけることができます。
システム情報
問題 | 解決策 |
|---|---|
インストール ファイル | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client C:\Program Files\Atlas Copco\ToolsTalk Server C:\Program Files (x86)\Atlas Copco\ToolsTalk Station Setup |
インストールからのログファイル | 各インストール フォルダーには log.txt という名のログファイルがあります。 |
コンピューターの IP アドレス | コントローラー構成に必要とされる情報です。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに cmd を入力して <リターン> キーを押します。管理者ウィンドウが開きます。 ipconfig と入力して<リターン> キーを押します。コンピューターのIPアドレスが表示されます。 |
コンピューター名 | クライアント インストールを正しいサーバー インストールにポイントするために必要な情報です。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに system information を入力して <リターン> キーを押します。システム情報のウィンドウが開きます。 クライアント インストールがサーバーの場所にポイントするにはシステム名パラメーターが必要です。 |
データベース カタログの削除 | 選択された SQL サーバーの管理スタジオを起動します。 目的のデータベース カタログを選択します。既定の名称は ToolsTalkEventStore です。 右クリックして 削除 を選択します。 チェックボックス バックアップの削除 … のチェックボックスをオンにします。 既存を閉じる... のチェックボックスをオンにします。 [OK] を選択します。 |
データベース認証を確認して修正します。 | 選択された SQL サーバーの管理スタジオを起動します。 目的のサーバーを選択します。 右クリックして プロパティ を選択します。 セキュリティ ページを選択します。 サーバー認証フィールドの SQL サーバーおよび Windows 認証 のラベルの付いたラジオボタンをオンにします。 |
Functionality Management System (FMS) のインストール | クライアント - サーバー インストールにおける唯一のアプリケーションです。 FMS インストールは InstallShield ウィザードの一部であり、自動的に実行されます。正しくインストールするには、システム変数 JAVA_HOME の値が正しい必要があります。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに System variables を入力します。いくつかのオプションが表示されます。システム環境変数の編集 を選択します。システムプロパティのポップアップ ウィンドウが開きます。 Environment variables コマンドボタンを選択します。 System variables のウィンドウをスクロールダウンして変数 JAVA_HOME を検索します。 この変数が存在する場合、その値は64ビット Java インストールの値です。 変数が存在しない場合、新規 コマンドボタンを選択します。新しいシステム変数のポップアップ ウィンドウが開きます。 変数名 は JAVA_HOME に設定されている必要があります。 変数値 はインストール ディレクトリ、例えば、C:\PROGRAM FILES\JAVA\JRE1.8.0_131 に設定されている必要があります。BIN フォルダーは含めないでください。 |
Functionality Management System (FMS) のインストールが正しく行われたかを確認します。 | Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに Services を入力します。いくつかのオプションが表示されます。Services を選択します。システムプロパティのポップアップ ウィンドウが開きます。 リストをスクロールダウンしてFlexNet License Server -acopco を検索します。 Status が Started, と表示されている場合、FMS がインストール済みで実行中です。 |
ToolsTalk 2 サーバーがインストール済みで実行中かを確認します。 | Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに Services を入力します。いくつかのオプションが表示されます。Services を選択します。システムプロパティのポップアップ ウィンドウが開きます。 リストをスクロールダウンして Atlas Copco Industrial Technique Host for ToolsTalk を検索します。 Status が Startedと表示されている場合、サーバーがインストール済みで実行中です。 |
役に立つヒント
ワークスペース ウィンドウの管理
プラント構造とレポートの両方のワークスペースでは、さらに作業するための単一のコントローラの選択を行います。ワークスペースを最小化または最大化して、次の図に示すようにドラッグするか、プラント構造アイコンを選択することにより、コントローラーワークスペースのスペースを増やすことができます。
ワークスペースビューの最小化と最大化
2 つのワークスペースエリアの間の線上にカーソルを置きます。カーソルの形が白の矢印から横向きの両方向矢印に変わります。
クリックしたままドラッグすると、2 つのワークスペース領域間の境界線を移動できます。ワークスペースは、ウィンドウの境界線を左側のメニューまで移動して最大化するか、ウィンドウの境界線を右側のメニューに移動して最大化することができます。
データ グリッドのフィルター処理と並べ替え
ワークスペース ウィンドウのデータ グリッド列は、並べ替えとフィルター処理を行うことができます。
並べ替えとフィルター機能にアクセスするには、列ヘッダーを選択します。
リストを並べ替えるには、[リストの並べ替え] を選択して、リストを昇順、降順、または既定の順序に並べ替えます。
リストをフィルタするには、表示する内容をフィルタするチェックボックスをオンにします。既定のビューに戻るには、[フィルタをクリア] を選択します。
検索機能
プラント構造のタブ、ライブラリおよびシステム管理タブで特定のコンテンツを検索することができます。この機能は、 システム管理
タブの [スケジュールされたタスク] タブと [ユーザーグループ] タブでは使用できません。
データグリッドが表示されている特定のタブのメインワークスペースに移動します。
ワークスペースの左上コーナーにある検索バーに、検索するパラメーターを入力します。
選択したパラメータに基づいて、リストが絞り込まれます。たとえば、パラメータ「イベント」を入力すると、「イベント」という単語を含む行のみが表示されます。
マルチソート機能
データグリッドの列を昇順または降順で並べ替えることができます(たとえば、インデックス、アルファベット順、日時など)。また、1番目、2番目など、並べ替えで優先される列の順番を割り当てることができます。
データグリッドが表示されている特定のタブのメインワークスペースに移動します。
データグリッドワークスペースのヘッダー行の最後にある
を選択します。最初に並べ替える列名のチェックボックスを選択してから、方向矢印を選択して、昇順か降順かを指定します。上向きの矢印は昇順を示し、下向きの矢印は降順を示します。
たとえば、[最終変更] を最初に選択すると、その隣に優先度番号 1 が表示され、上向きの矢印を選択した場合は、[最終変更] 列で、一番上の行に最新の日時のデータが表示されます。他の列は、この選択に基づいて表示順序が変更されます。別の列が次に並べ替えされるように選択されている場合、その列の優先度番号は2として表示され、優先度は2の列のデータは、優先度1の列内のデータが並べ替えされた後、方向矢印に基づいて並べ替えられます。 その後さらに選択した列に対して同様に続きます。
列の優先度を削除または変更するには、チェックボックスの選択を解除するか、もう一度選択します。
エクスポートとインポートのファイル形式
コントローラ構成(設定)と結果のエクスポートとインポートは、ToolsTalk 2アプリの様々な場所から行うことができます。エクスポートの結果が異なるファイル内容になることがあります。
さらに処理するために締め付け結果やイベントをエクスポートします。
アトラスコプコのサービスエンジニアからのデバッグ支援のために、ting ログファイルをエクスポートします。
別のコントローラに設定をコピーするために使用できるコントローラ構成をエクスポートします。
コントローラデータのエクスポートは、コントローラのタイプとコントローラソフトウェアのバージョンによって異なることがあります。ファイル形式とファイル内容の詳細については、各コントローラとバージョンのマニュアルを参照してください。
この表は、ToolsTalk 2 エキスポートの概要を示します。
位置 | パス | ファイルタイプと形式 | 使用法 |
|---|---|---|---|
コントローラライブラリ構成 |
| *.json | コントローラ構成のエクスポートとコントローラテンプレートの作成。 ToolsTalk 2の中で使用。 |
フィールドバス構成 |
| *.json | フィールドバス構成のエクスポート。構成のコピーに使用。インポートコマンドと一緒に使用。 ToolsTalk 2の中で使用。 |
コントローラソフトウェアとデータ管理 |
| *.tar.gz | コントローラ結果とコントローラからの構成の完全なエクスポートのために使用。ツールログのエクスポートも可能。 以前にエクスポートされたファイルの構成とパラメータのインポートにも使用可能。 |
スケジュールされたコントローラのエクスポートとインポート |
| *.tar.gz | コントローラからのコントローラ結果と構成のスケジュールされた完全なエクスポートに使用。 以前にエクスポートされたファイルの構成とパラメータのスケジュールされたインポートにも使用可能。 |
コントローラのエクスポートとインポート |
| *.tar.gz | コントローラからのコントローラ結果と構成のスケジュールされた完全なエクスポートに使用。 以前にエクスポートされたファイルの構成とパラメータのスケジュールされたインポートにも使用可能。 ユーザー権限によってグローバルアイコンへのアクセスが禁止されている場合の別のルートとして使用。 |
結果のエクスポート |
| *.csv | コントローラからの締め付け結果のエクスポートのみに使用。 |
コントローラソフトウェア |
| *px2it.zip | 新しいコントローラソフトウェアの読み込み。 |
ファイルタイプと形式 | 使用法 |
|---|---|
*.json | ToolsTalk 2の中で使用されるファイル形式 ファイルは構成とパラメータ設定のコピーに使用可能。 このファイル形式は、 ToolsTalk 2アプリでは使用できません。 |
*.tar.gz | コントローラ結果とコントローラからの構成の完全なエクスポートのために使用。 ファイル形式はコントローラでは使用できない。ファイルには次のモジュールを含むことができる。
|
*.csv | コントローラからの締め付け結果またはイベントのエクスポートのみに使用。 このファイルは *.tar.gz ファイルに含まれる。 CSV ファイルは、コントローラの言語設定に応じて、フィールドを区切るのに多様な文字を使用。 フィールドはコントローラソフトウェアバージョンによって異なる。 |
*px2it.zip | コントローラソフトウェアの読み込みにのみ使用される。構成やパラメータ設定は含まない。 |
イベントコード
様々なタイプのイベントを使って、ユーザーに対して、システム内の特定の状態の変化または発生を通知します。イベントごとに異なるアクションが必要です。
説明されている手順の一部は、アトラスコプコのサービス担当者のみが実行できます。
特定のイベントコードの詳細については、以下のフィルターを使用するか、検索ボックスにイベントコードの検索条件を入力してください。
ログ/表示/Ack/Conf | |||||||
|---|---|---|---|---|---|---|---|
none | item | none | none | none | column | list | list |
1000 | 情報 | コントローラーが起動しました | コントローラーが起動します。 | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | ||
1001 | 警告 | コントローラーのシリアル番号が更新されました | IT ボードボックスのシリアル番号 (コントローラーのシリアル番号) が AUX ボードボックスのシリアル番号と異なる場合、起動時に生成されます。AUX ボードは、フィールド内で非交換可能とみなされます。シリアル番号が更新されると、コントローラーは再起動します。 | IT ボードやボックスを交換してください。 | ログ Conf | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラーとツール |
1010 | 情報 | Tool Connected | ツールが接続されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
1011 | 情報 | ツールが切断されました | ツールが切断されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
1012 | 情報 | ツールがコントローラー接続を拒否しました | このイベントは、ツールがスキップゾーンに入っている場合に発生する可能性があります。 | 別のコントローラーがツールに接続されているかどうかを確認してください。 ツール設定が正しく設定されていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | コントローラーとツール |
2000 | 警告 | バッテリー低 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール | |
2001 | 警告 | バッテリーが空です | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2002 | 警告 | ツールバッテリー正常性低 | ツールのバッテリー正常性の問題が検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2004 | 警告 | ツールが希望するタイプではありません | ツールが、ツール最大トルクが異なるツールに交換されました。 | ツールの変更。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2006 | 警告 | ツールバックアップバッテリー正常性低 | ツールのバックアップバッテリーのパフォーマンスが低すぎます。 | バックアップバッテリーを交換してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2007 | 警告 | ツールバックアップ バッテリーがないか、または破損しています | ツールバックアップ バッテリーがないか、または破損しています。 | バッテリーを挿入します。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2008 | 警告 | ツールバックアップバッテリーエラー | ツールのバックアップバッテリーエラーが検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2009 | 警告 | バックアップバッテリー電圧低 | コントローラーのバックアップバッテリー残量がほとんど空です。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2010 | エラー | ツールソフトウェアバージョンが一致していません | ツールおよびコントローラーソフトウェアのバージョンに互換性がありません。 | サービスツール - ツールソフトウェアの更新。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2012 | 警告 | ツール通信障害 | ツールとコントローラー間の通信が中断されました。 | アンテナの配置を変えてください。 | Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | ツール |
2013 | 警告 | 不正なリング位置 | ツール方向スイッチの位置に障害があります。 | 頻繁に発生する場合は、ツールの整備を行ってください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2014 | 警告 | ツールがオーバーヒート | ツールがオーバーヒートしました。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | ツール |
2015 | エラー | ツール温度センサーエラー | SRB、TBP、およびIxBツールのみ。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2016 | 警告 | ツールパルスユニット過熱 | パルスユニット過熱ツールはロックされていませんが、パルスユニットの温度がしきい値を超えている間は、ツールが開始されるたびに警告が表示されます。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2019 | 警告 | ツールがモーターを起動できませんでした | ツールモーターの障害。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2020 | 警告 | ツールのモーター調節が必要 | ツールのモーター調節が必要です。 | モーター調整を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | ツール |
2021 | 警告 | モーター調整に失敗しました | モーター調整に失敗しました。 | モーター調整を完了するか、ツールの保守を行います。 | ログ | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2022 | 情報 | モーター調整完了 | モーター調節が完了しました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール | |
2023 | 警告 | ツールにオープンエンドの調整が必要 | ツールにオープンエンドの調整が必要です。 | オープンエンドの調整を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2024 | 警告 | オープンエンドの調整に失敗しました | オープンエンドの調整に失敗しました。 | オープンエンドの調整を複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2025 | 情報 | オープンエンドの調整に成功しました | オープンエンドの調整に成功しました。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2026 | 警告 | オープンエンドの位置で失敗しました | オープンエンドの位置決めで失敗しました。 | もう一度ツールトリガーを押し、位置決めが完了するのを待ちます。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2027 | 警告 | ツールの温度が高いため使用が制限されています | 温度制限値に達しました。過熱によるツールのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | ツール |
2030 | エラー | ツールメモリ障害:ツールの変更 | ツールメモリが破損しています。 | ツールの保守を行ってください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2031 | エラー | ツールアクセサリメモリが破損しています | ツールアクセサリメモリが破損しています。 | ツールアクセサリの整備を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2040 | エラー | システムチェック失敗 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | ツール | ||
2041 | エラー | トルクトランスデューサーエラー | 校正エラー時またはツールが変換器エラーをレポートした場合に生成されます。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2042 | エラー | 角度トランスデューサーエラー | ツールの保守を行ってください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール | |
2043 | エラー | ツール接地故障エラー | ツールの保守を行ってください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール | |
2044 | 情報 | ツールサービス間隔が過ぎています | ツールの保守が必要であることを示します。設定した締め付けの回数を超えたときにトリガーされます。 | ツールの整備を実施します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2045 | 警告 | ツール校正データが無効です | 校正データの検証に失敗した場合。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | ツール |
2046 | 情報 | ツール:次の校正日が過ぎています | ツールの較正が必要であることを示します。校正アラームが設定で有効にされており、現在時刻が次の校正日を過ぎている際にトリガーされます。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2048 | 情報 | QA デバイスでツール校正値が更新されました | ツールの校正は、QAデバイスによる校正が実行されたときに更新されています | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2050 | エラー | ツールパラメータファイルはサポートされていません | 必要なツールパラメータがありません。 | ツールパラメータを更新します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2060 | 情報 | 予期しないトリガー動作 | アクセサリが接続されている場合にツールの起動を行わないために使用されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール | |
2071 | エラー | ツールメモリが破損しています | ツールの記述子が破損しています。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2072 | 情報 | 不明なデバイスが接続されています | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール | ||
2073 | 警告 | ツールトリガーの監督失敗 | HW チャンネル障害です。ツールトリガーのハードウェアとソフトウェアが一致しません。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2074 | 警告 | ツールインジケーターボード故障 | ツールインジケーターボード故障です。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2075 | 警告 | ツールファン電圧障害 | ツールファン電圧障害です。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2076 | 警告 | ツールアクセサリバス電圧障害 | ツールアクセサリバス電圧障害です。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2077 | 警告 | ツールトリガーセンサエラー | ツールトリガーセンサエラーです。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2078 | 情報 | ツール締め付けプログラムが更新されました | 締め付けプログラム更新のために、ツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2079 | エラー | ツールケーブルがサポートされていません | ツールケーブルが破損しています。ケーブル内のチップは応答していないか、破損しています。 | ケーブルを交換してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | ツール |
2080 | エラー | ツールバッテリー障害 | DC 電圧が高すぎるか、低すぎます。バッテリー障害。 | アトラスコプコのサービス担当者に連絡し、アトラスコプコにバッテリーを送り返します (再利用しないでください!) 。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール |
2081 | エラー | ツール電流制限に達しました | 電流制限値に達したため、ドライブが無効になっています。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2082 | エラー | ツール電流測定エラー | 電流測定エラー電流の測定結果が信頼できません。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール |
2083 | エラー | ツール内部エラー | さまざまな内部ハードウェアエラー。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール |
2084 | エラー | ツール内部ソフトウェアエラー | さまざまな内部ソフトウェアエラー | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール |
2085 | エラー | ツール RBU エラー | RBU エラーがツールソフトウェアによって検出されました。 | RBU が正しくインストールされているか確認してください。それでもエラーが発生する場合、ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2086 | エラー | ツール停止 | ツールモーターが停止しています。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール |
2087 | 警告 | ツールモーター電流高 | ツールのモータの電流限度を超えており、ツールがロックされています。ツールはフェールセーフモードに入ります。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール | |
2088 | 警告 | ツールバッテリー電流高 | ツールバッテリー電流が高過ぎます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール | |
2089 | 警告 | ツールドライブ電圧低 | ツールのドライブ電圧が監視されている電圧下限値を下回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2090 | 警告 | ツールドライブ電圧高 | ツールのドライブ電圧が監視されている電圧上限値を上回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2091 | 警告 | ツールメインボードエラー | ツールメインボード内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl XB | ツール | |
2092 | 警告 | ツールパワーモジュールエラー | ツールパワーモジュール内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2093 | 警告 | パルスユニットオイルレベル低 | 接続されたパルスツールのオイルレベルが低いです。 | ツールの保守を行ってください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2094 | 警告 | パルスユニットオイルレベル空 | 接続されたパルスツールのオイルレベルが必要な動作レベル以下です。 | ツールの保守を行ってください。 | ログ ディスプレイ ACK Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2095 | 警告 | ツールバッテリーの通信が失われました | ツールがバッテリーとの通信を失いました。 | バッテリーが正しく挿入されていることを確認します。または、バッテリーを交換します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2096 | エラー | ツールバッテリーのソフトウェアバージョンが一致しません | ツールバッテリーソフトウェアは、ツールソフトウェアと互換性がありません。 | ソフトウェアを更新してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2100 | 情報 | STwrench smartHEAD が削除されました | STwrench smartHEAD が削除されました。 | smartHEADを再接続し、レンチを再起動します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2101 | 警告 | ロック時のレンチ締め | ツールのステータスがコントローラーによってロックされているときに、レンチによる締め付けが実行されました。 | コントローラーのツールステータスがロック解除されるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 ToolsControl | ツール |
2120 | 警告 | 開始できません: ツールにアクティブなトルクトランスデューサーがありません | ログ ディスプレイ | Flex | ツール | ||
2121 | 警告 | 接続されたツールではトランスデューサーが無効になっています | ログ ディスプレイ | Flex | ツール | ||
2122 | 警告 | 開始できません: ツールに必要なトルクトランスデューサーがありません | 複数トルク トランスデューサーを備えたツールに変更するか、ツール構成の「デュアルトルクが必要」の設定を更新してください。 | ログ ディスプレイ | Flex IxB | ツール | |
2123 | 警告 | 開始できません: ツールに必要な角度トランスデューサーがありません | 複数トルク トランスデューサーを備えたツールに変更するか、ツール構成の「デュアルトルクが必要」の設定を更新してください。 | ログ ディスプレイ | Flex | ツール | |
2125 | エラー | トランスデューサー 2 のトルクトランスデューサーエラー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2127 | エラー | ツールトルクトランスデューサー校正エラー | トルク トランスデューサーにエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex 同期締め付け | ツール |
2129 | エラー | メイントルクトランスデューサー:シャントテストに失敗しました | トルク トランスデューサーにエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex 同期締め付け XB | ツール |
2131 | エラー | メイントルクトランスデューサー:ゼロオフセット補正に失敗しました | トルク トランスデューサーにエラーがあります。 | 締め付けは工具のトルクを確実にゼロにして開始してください。ツールの保守を行ってください。 | ログ ディスプレイ | Flex 同期締め付け | ツール |
2133 | エラー | ツールトルクトランスデューサーハードウェアエラー | トルク トランスデューサーにエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex 同期締め付け | ツール |
2135 | エラー | ツールトルクトランスデューサーエラー: A/D コンバーターのオーバーフロー | トルク トランスデューサーにエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex 同期締め付け | ツール |
2136 | エラー | トランスデューサー 2 でのツールトルク トランスデューサー校正エラー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2137 | エラー | ツールトルクトランスデューサーエラー: トランスデューサー 2 でシャントテストに失敗しました | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2138 | エラー | ツールトルクトランスデューサーエラー: トランスデューサー 2でゼロオフセット補正に失敗しました | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | 締め付けは工具のトルクを確実にゼロにして開始してください。ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2139 | エラー | トランスデューサー 2 でのツールトルク トランスデューサー ハードウェアエラー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2140 | エラー | ツールトルクトランスデューサーエラー: トランスデューサー 2 での A/D コンバーターのオーバーフロー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | ツールの保守を行ってください。 | ログ ディスプレイ | Flex | ツール |
2142 | エラー | トルク トランスデューサーの冗長エラー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | 冗長エラーのリセット | ログ ディスプレイ | Power Focus 6000 ツール管理 | ツール |
2143 | エラー | 角度トランスデューサーの冗長エラー | 複数トランスデューサーを備えたツールのトルク トランスデューサー 2 にエラーがあります。 | 冗長エラーのリセット | ログ ディスプレイ | Power Focus 6000 ツール管理 | ツール |
2202 | エラー | ツールHMI過電流が発生しました | ツール HMI 過電流が検出されました。 | ツールの保守を行ってください。ツール HMI を交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2203 | エラー | ツールフロントライトの過電流が発生しました | ツールフロントライトの過電流が検出されました | ツールの保守を行ってください。ツールフロントライトを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2204 | エラー | アクセサリバスの過電流が発生しました | アクセサリバスの過電流が検出されました。 | ツールの保守を行ってください。アクセサリバスを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2207 | エラー | バイブレーター過電流が発生しました | バイブレーターの過電流が検出されました。 | ツールの保守を行ってください。バイブレーターを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2208 | 警告 | システムCPUの温度高 | システムCPUの温度高。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | IxB | ツール |
2209 | エラー | システムCPUの温度がクリティカル | システムCPUの温度がクリティカルです。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | IxB XB | ツール |
2210 | エラー | 対応していない電源が接続されています。締め付けは許可されません | ツールに接続されているバッテリーの電圧が低すぎます。 | より高い電圧のバッテリーをツールに取り付けます。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2217 | 情報 | バックアップバッテリーで作動しています | バックアップバッテリーで作動しています。 | ログ | IxB | ツール | |
2218 | 情報 | バッテリ接続済み | バッテリーが接続されているか、コントローラー/ツールが起動しています。 | ログ | IxB | ツール | |
2219 | 情報 | 電源:不明 | 不明な電源が接続されているか、コントローラー/ツールが不明な電源で起動しています。 | ログ | IxB | ツール | |
2220 | エラー | ツールファン障害 | IPB-P に適用されます。 | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール |
2221 | 警告 | バッテリーが過熱しています | バッテリー温度が高すぎます。 | バッテリーを交換し、過熱したバッテリーを冷まします。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 ToolsControl | ツール |
2222 | 警告 | バッテリーの温度が高いため、使用が制限されています | バッテリー温度が高すぎます。 | バッテリーを交換し、過熱したバッテリーを冷まします。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 ToolsControl | ツール |
2223 | エラー | フロント LED は使用できません | ツールの起動時に正面の LED が検出されない場合、このイベントがトリガーされます。 | フロントライトまたはフロントライトケーブルの接続を修正します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2224 | エラー | フロント LED カラーは利用できません | ツールの起動時に正面の LED 色が検出されない場合、このイベントがトリガーされます。 | フロントライトの色またはフロントライトケーブルの接続を修正します | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2225 | エラー | RHMI ボタンは使用できません | ツールの起動時に RHMI ボタンが検出されない場合、イベントがトリガーされます。 | RHMI ボタンを修正してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2226 | エラー | LED リングは利用できません | ツールの起動時に LED リングが検出されない場合、イベントがトリガーされます。 | バックリングライトまたはバックリングライトの接続を修正します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2227 | エラー | ファンは利用できません | ツールの起動時に ファンが検出されない場合、イベントがトリガーされます。 | ファンを修理してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2228 | エラー | RRE ボードが利用できません | ツールの起動時にツール基板インターフェースが検出されない場合、イベントがトリガーされます。 | ツール基板のインターフェイスを修正してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 | コントローラーとツール |
2229 | 警告 | ツールバックアップバッテリー空 | ツールバックアップ バッテリーが空です。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2230 | 情報 | ツールバックアップ バッテリーが完全に充電されました | ツールバックアップ バッテリーが完全に充電されました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2231 | 警告 | ツールバックアップバッテリーなし | ツールバックアップバッテリーがありません。 | バッテリーを挿入します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール |
2232 | 警告 | ツールバックアップバッテリー破損 | ツールバックアップ バッテリーが破損しています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | ツール | |
2300 | エラー | ツールメインボードエラー - 電圧が範囲外 (トルク) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2301 | エラー | ツールメインボードエラー - 電圧が範囲外 (アナログ) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2302 | エラー | ツールメインボードエラー - 電圧が範囲外 (MCU Vdd) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2303 | エラー | ツールメインボードエラー - 電圧が範囲外 (ステップアップ) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2304 | エラー | ツールメインボードエラー - 電圧が範囲外 (無停電電源装置) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2305 | エラー | ツールメインボードエラー - 電圧が範囲外 (ツール電源) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2306 | エラー | ツールメインボードエラー - 電圧が範囲外 (Vdd) | ツールを再起動します。エラーが解決しない場合は、ツールを修理して、ケーブル コネクタの接続が緩んでいないかどうかを確認してください。ケーブルに損傷がないか調べます。 | ログ ディスプレイ ACK | IxB | ツール | |
2307 | エラー | ツールのメインボードエラー - ハードウェア障害 (IMU) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2331 | エラー | ツール電源モジュールエラー - 電圧低 (基準値) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2332 | エラー | ツール電源モジュールエラー - 電圧高 (基準値) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2333 | エラー | ツール電源モジュールエラー - 電圧低 (無停電電源装置) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2334 | エラー | ツール電源モジュールエラー - 電圧高 (無停電電源装置) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2335 | エラー | ツール電源モジュールエラー - 電圧低 (バックアップドメイン) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2336 | エラー | ツール電源モジュールエラー - 電圧高 (バックアップドメイン) | ツールの保守を行ってください。 | ログ ディスプレイ ACK | IxB | ツール | |
2500 | エラー | テンショナープーラーバー最大数 | テンショナープーラーバーを交換する必要があります。システムは使用できないようにロックされています。圧力は解放するこのみが可能です。 | テンショナーをサービス組織に送って、プーラーバーを交換してください。 | ログ ディスプレイ ACK | PFHC | ツール |
2501 | エラー | ポンプモーター保護アラーム | ポンプモーターの保護によりモーターが停止しました。システムは停止する必要があります。システムに圧力がかかっている場合は、手動で圧力を解放する必要があります。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、ポンプを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2502 | エラー | ポンプモーターオイルレベル低アラーム | ポンプモーターのオイルレベルが低いため、モーターが停止しました。システムに圧力がかかっている場合は、手動で圧力を解放する必要があります。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放してオイルを補充します。 | ログ ディスプレイ ACK | PFHC | ツール |
2503 | エラー | ポンプモーター油温高アラーム | ポンプモーターの油温高。 | システムの電源を切り、オイルが冷えるのを待ちます。 | ログ ディスプレイ ACK | PFHC | ツール |
2504 | エラー | テンショナー圧力センサーアラーム | テンショナーの圧力センサー電子部品の故障。圧力を読み取ることも、システムに報告することもできません。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、テンショナーを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2505 | エラー | ポンプ圧力センサーアラーム | ポンプの、圧力センサー電子機器の故障。圧力を読み取ることも、システムに報告することもできません。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、ポンプを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2506 | エラー | 予期しない時計回りの回転が検出されました | テンショニングが完了したら、圧力が解放されるのを待っている間にナットを時計回りに回転させます。結果が無効化されます。 | 圧力を解放し、ナットに再びテンショニング力をかけます。 | ログ ディスプレイ Conf | PFHC | ツール |
2507 | エラー | 予期しない反時計回りの回転が検出されました | テンショニングが完了した後、圧力が解放されるのを待っている間にナットを反時計回りに回転させます。結果が無効化されます。 | 圧力を解放し、ナットに再びテンショニング力をかけます。 | ログ ディスプレイ Conf | PFHC | ツール |
2508 | エラー | ポンプまたはテンショナーの圧力センサーの故障 | ポンプとテンショナーの圧力センサーの読み取り値の差が大きすぎます。加圧が停止します。 | 油圧または圧力センサーのキャリブレーションに問題があります。システムを再起動して、もう一度やり直してください。問題が解決しない場合は、お近くのアトラスコプコ販売代理店までお問い合わせください。 | ログ ディスプレイ ACK | PFHC | ツール |
2509 | エラー | テンショナー圧力センサーの故障または油圧ホースの故障 | テンショナーの圧力センサーは圧力を示さないものの、ポンプのセンサーが圧力上昇を読み取る。加圧が停止します。 | 油圧または圧力センサーのキャリブレーションに問題があります。システムを再起動して、もう一度やり直してください。問題が解決しない場合は、お近くのアトラスコプコ販売代理店までお問い合わせください。 | ログ ディスプレイ ACK | PFHC | ツール |
2510 | エラー | カスタム ID の設定に失敗しました | カスタム ID の設定に失敗しました。 | システムを再起動し、接続されているデバイスを確認してください。ユニットのカスタムIDが間違っている場合は、設定をやり直してください。 | ログ ディスプレイ ACK | PFHC | ツール |
2511 | 情報 | カスタムIDが設定されました | カスタム ID の設定に成功しました。 | ログ ディスプレイ ACK | PFHC | ツール | |
2512 | 警告 | 不正な形式のバーコード文字列、無視されます | スキャンされた文字列をタワーデータバーコードとして解析できませんでした。 | スキャンされた文字列をタワーデータバーコードとして解析できませんでした。 | ログ ディスプレイ ACK | PFHC | ツール |
2513 | エラー | ポンプ圧が検出されませんでした | システムは加圧しようとしていますが、ポンプの圧力上昇は記録されていません。原因として、三相コネクタの位相順序が正しくないことが考えられます。 | システムの電源を切り、電源コネクタの位相を逆にします。 | ログ ディスプレイ ACK | PFHC | ツール |
2514 | 警告 | テンショナー過トルクアラーム | クリックレンチにかかるトルクが高すぎます。トルクセンサーの破損の原因となります。 | トルクを緩めます。 | ログ | PFHC | ツール |
2515 | 警告 | テンショナー過圧アラーム | テンショナー内の圧力が高すぎます。 | 圧力を落とすか、圧を逃します。油圧パラメータを確認してください。 | ログ | PFHC | ツール |
2516 | 警告 | 予期しないポンプまたはテンショナーのファームウェアです | 予期しないポンプまたはテンショナーのファームウェアバージョンが検出されました。システムを再起動してください。それでも問題が解決しない場合は、システムを実行できる可能性がありますが、予期しない動作がないか注意深く観察してください。 | 電源サイクルシステム | ログ ディスプレイ ACK | PFHC | ツール |
2517 | エラー | ポンプまたはテンショナーのファームウェアバージョンに互換性がありません。システムを再起動してください。システムを実行できません。 | ポンプまたはテンショナーのファームウェアバージョンに互換性がありません。システムを再起動してください。システムを実行できません。 | システムを再起動します。それでも問題が続く場合は、障害のあるユニットを交換してください。接続されているデバイスをチェックして、どのデバイスが接続されていないかを確認してください。 | ログ ディスプレイ ACK | PFHC | ツール |
3000 | エラー | コントローラー内部ソフトウェアエラー | コントローラーのソフトウェアエラー。 | サービスにご連絡ください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3001 | エラー | コントローラークロックバッテリー空 | 内部バッテリーが寿命に近づいています。 | バッテリーを交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3010 | 警告 | システム過熱 | コントローラーが過熱しています。 | クールダウンしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け |
3011 | 警告 | コントローラーハードウェア駆動部が過熱しています | クールダウンしてください。 | ログ ディスプレイ Conf | Flex ToolsControl | コントローラー、ドライブ、同期締付け | |
3013 | 警告 | コントローラーの温度が高いため、使用が制限されています | 温度制限値に達しました。過熱によるコントローラーのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | コントローラーの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3020 | 警告 | コントローラーハードウェア障害 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け | ||
3021 | 警告 | システム電圧の問題 | DC 電圧が高すぎるか、低すぎます。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け | |
3022 | 警告 | コントローラーの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3023 | 警告 | コントローラーの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3024 | 警告 | ドライブの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex ToolsControl | コントローラー、ドライブ、同期締付け |
3025 | 警告 | ドライブの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex ToolsControl | コントローラー、ドライブ、同期締付け |
3026 | 情報 | すでに接続されている IxB Connect ツールの最大数。 | コントローラーに接続されている IxB Connect ツールの数が、接続可能なツールの最大数に達したことを示します。 | ログ | ToolsControl | コントローラーとツール | |
3029 | 情報 | クライアントのネットワーク接続が切断されました | ツールがネットワーク範囲外に出たか、別の原因によりツールのネットワーク接続が失なわれました。 | ローミングのしきい値を確認してトラブルシューティングを行い、選択したチャネル番号を 24 未満に減らして、ローミングが有効になっていることを確認します。 | ログ ディスプレイ Conf ACK | IxB | コントローラーとツール |
3030 | エラー | IP アドレスがネットワーク上の他のノードと競合しています | 設定された IP アドレスは、同じネットワーク上の別のデバイスによって使用されています。 | デバイスのうちの 1 つの IP アドレスを変更してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC | コントローラー、ドライブ、同期締付け |
3031 | 情報 | ネットワークケーブルが抜けています。 | 工場用ポートのキャリアが失われました (ケーブルの接続が解除されました) 。 | ケーブルの接続を確認してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3032 | 情報 | ペアリング開始 | ツールペアリングが開始しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け | |
3033 | 情報 | ペアリング成功 | ツールペアリングが成功しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け | |
3034 | 情報 | ペアリングに失敗しました:ツールが見つかりません | コントローラーは、無線ピアにスキャンする際にペアリングするツールを見つけられませんでした。 | ツールをペアリングモードに設定し、再試行してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け |
3035 | エラー | ペアリングに失敗しました:複数のツールが見つかりました | コントローラーは、無線ピアをスキャンする際に複数のツールを見つけました。 | コントローラーでペアリングモードを開始する際には、1 つのツールのみがペアリングモードになっていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け |
3036 | エラー | ペアリングに失敗しました:通信エラー | コントローラーがペアリングプロセス中に、接続の喪失、想定外の応答、またはタイムアウトになりました。 | ペアリングを複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け |
3037 | 情報 | ペアリングに失敗しました:ツールスロットが一杯です | 1つのツールスロットをクリアしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、同期締付け | |
3040 | 警告 | 非常停止 | 緊急停止のためにドライブが無効になりました。 | 非常停止をリセットします。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3050 | 情報 | システムクロック更新 | システムクロックが更新されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC | コントローラー、ドライブ、同期締付け | |
3051 | エラー | システムクロックエラー | ハードウェアリアルタイムクロック (RTC) から読み出した時間が間違っています。 | RTC バッテリーを変更してください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC | コントローラー、ドライブ、同期締付け |
3052 | 警告 | リモート起動構成エラー | HW と SW リモート起動構成が一致していません。 | HW ディップスイッチが選択された開始ソースと一致していることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3053 | 情報 | ドライブが接続されました | 同期締め付けドライブが接続されました。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け | |
3054 | 情報 | ドライブが切断されました | ドライブがコントローラーから切断されました。 | 外部に接続されているドライブのケーブル接続と電源を確認するか、コントローラーを交換してください。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3055 | 警告 | モード構成エラー | 選択したモードが誤って構成されると生成されます。たとえば、同じボルト番号または同じチャンネルの2つのボルトの構成、不完全モード構成など。 | モード構成エラーについては、ToolsTalk2 を確認してください。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け |
3056 | 警告 | 開始できません: ツールまたはドライブがありません | 使用されているチャンネルにドライブやツールがない場合に生成されます。 | HMIのチャンネルメニューを確認してください。喪失したドライブまたはツールを接続します。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け |
3057 | 情報 | 開始できません: チャンネルはすでに使用されています | 必要なチャンネルが別の仮想ステーションに割り当てられる場合に生成されます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3058 | 情報 | モードが選択されていません | モードを選択します。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け | |
3059 | 警告 | アトラスコプコのライセンスマネージャーへの接続に失敗しました | コントローラーが、ローカルのライセンスマネージャーに接続してライセンスを取得するのに失敗したことを示します。 | ローカルネットワークを検証してください。再び失敗する場合は、コントローラーの整備を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3060 | エラー | 仮想ステーションライセンス数が超過しました。 | 仮想ステーションのライセンスが使用可能なライセンス数を超えています。 | ライセンスまたは仮想ステーションの構成を更新します。 | ログ ディスプレイ ACK | ToolsControl | コントローラー |
3061 | 警告 | 開始できません: 信号低を有効にします | 締め付けを開始する前に、「操作の有効化」信号が「高」に設定されていることを確認してください。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け | |
3062 | 警告 | 開始できません: 信号高を停止します | 締め付けを開始する前に、「操作の有効化」信号が「低」に設定されていることを確認してください。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け | |
3063 | 警告 | 開始できません: すべてのチャンネルが禁止されました | すべてのチャンネルが禁止されているため、締め付けを開始することができません。 | 少なくとも1つのチャンネルを禁止しないように設定します。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け |
3064 | 警告 | キャリア番号に問題があります | FlexCarrierの16進スイッチがゼロに設定されています。 | スイッチをゼロ以外の値に切り替えます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3065 | 警告 | キャリアの非常停止構成プラグのタイプが間違っているか、見つかりません | キャリアに非常停止構成プラグがないか、プラグのタイプが間違っています。 | 正しいプラグタイプを挿入してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3066 | 警告 | キャリア電圧入口: 三相ACなし | キャリアへの三相電源が許容範囲内であり、完全に機能していることを確認します。三相ケーブルが良好な状態で、正しく接続されていることを確認します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3067 | 警告 | キャリア電圧入口: 1つのAC相がありません | キャリアへの三相電源が許容範囲内であり、完全に機能していることを確認します。三相ケーブルが良好な状態で、正しく接続されていることを確認します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3068 | 警告 | キャリア:内部24 VDC電源装置が故障しています | キャリアの保守サービスを行います。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3069 | 警告 | キャリア24電圧出力ポートが過電流により無効になっています | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3070 | 警告 | キャリア、PF6 FlexControlケーブル出力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3071 | 警告 | キャリア、PF6 FlexControlケーブル入力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3072 | 警告 | 短絡による緊急停止 24 VDC 電源障害 | キャリアの保守サービスを行います。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3073 | 警告 | 開始できません: システムが非常停止しました | 複数のスピンドルを割り当てる場合、このイベントは非常停止のために 「preStartCheckFailed」 によって呼び出されます。 | 非常停止をリセットします。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け |
3074 | 警告 | キャリア過熱 | クールダウンしてください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3075 | 警告 | キャリア温度 OK | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | ||
3076 | 警告 | キャリア:内部24 VDC電源が過負荷です | 内部PSUからの電流出力が高すぎます。 | PSUから電力供給を受けている他のキャリアを切断します。24 VDCを使用して外部機器をすべて取り外します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3077 | 警告 | キャリア:内部24 VDC電源電圧値超過 | 内部PSUからの電圧出力が高すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3078 | 警告 | キャリア:内部24 VDC電源電圧値過小 | 内蔵PSUからの電圧出力が低すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3079 | 警告 | キャリアへの外部供給:24VDC過電圧 | バックアップ入力電圧が27VDCを超えています。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3080 | 警告 | キャリアへの外部供給:24VDC不足電圧 | バックアップ入力電圧が19VDC未満です。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3081 | 警告 | キャリア電圧入口: 三相AC過電圧 | 入力電圧が高すぎます。 | 入力電圧を下げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3082 | 警告 | キャリア電圧入口: 三相AC不足電圧 | 入力電圧が低すぎます。 | 入力電圧を上げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け |
3083 | エラー | Anybus/Profisafe モジュールファームウェアの間違い | Anybus モジュールのファームウェアを最新バージョンに更新します。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 同期締め付け | コントローラー、ドライブ、同期締付け | |
3084 | エラー | ソフト PLC ランタイムエラー | eCLR が制御不能な方法で終了しました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け | コントローラー、ドライブ、同期締付け | |
3085 | 警告 | キャリア:ファンモジュールが故障しています | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3086 | 警告 | キャリア:ファンモジュールの部分故障 | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3087 | 警告 | キャリア:左ファンモジュールの故障 | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3088 | 警告 | キャリア:左ファンモジュールの部分故障 | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3089 | 警告 | キャリア:右ファンモジュールの故障 | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3090 | 警告 | キャリア:右ファンモジュールの部分故障 | ファンモジュールを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、同期締付け | |
3091 | 情報 | 同期メンバー チャネルの衝突 | 2 つ以上の同期メンバーが同じチャネルに構成されている場合に生成されます。 | 競合している同期メンバーを再構成して、別の同期メンバーに割り当てられていない一意のチャネル、または異なるチャネルを持つようにします。 | ログ Conf ディスプレイ ACK | Power Focus 8 同期締め付け ToolsControl | コントローラー、ドライブ、同期締付け |
3095 | 警告 | WiFi 信号強度 (低) | ワイヤレスネットワークの信号強度が、「信号強度が下回った時に警告する (dBm)」の設定で設定された値を下回っています。 | Conf | IxB STRw | コントローラーとツール | |
3096 | 警告 | 携帯電話の信号強度低 | 移動体通信接続の RSSI 値が、定義されたしきい値である -98 dBm を下回っています。 | ツールを移動体通信アンテナに近づけると、接続が強化され、データの損失を防ぎます。 | Conf | IxB | コントローラー、ドライブ、同期締付け |
3097 | 警告 | 携帯電話の接続が失われました | システムが移動体通信ネットワークへの接続を失いました。 |
| ログ ディスプレイ Conf | IxB | コントローラー、ドライブ、同期締付け |
3100 | 警告 | モード構成が存在しません | 締め付けを開始する前に、既存の同期モードを選択してください。 | ログ ディスプレイ | Flex 同期締め付け | コントローラー、ドライブ、同期締付け | |
3150 | エラー | ソフトウェアIAMの非互換性 | IAMはコントローラーにインストールされたソフトウェアと互換性がありません | IAM を交換してください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3160 | エラー | 新しくインストールされたソフトウェアのライセンス認証に失敗しました | ライセンス認証中に問題が発生しました。新しくインストールされたソフトウェアが起動すると、以前に動作していたソフトウェアへのフォールバックが発生する。このエラーは、ソフトウェアのインストール中にのみ起こり、新しいソフトウェアが 3 回起動できなかった場合に発生します。 | エクスポートして、アトラスコプコまでご連絡ください。インストールしようとしているソフトウェアのバージョンと、機能しているソフトウェアのバージョンを書き留めてください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3161 | エラー | 予期しないソフトウェアパーティションで開始されました。 | コントローラーは、予期されたソフトウェア側ではなく、非アクティブなソフトウェア側で起動しました。 | ソフトウェア情報を書き留めます (コントローラーのホーム画面で、[コントローラー] > [ソフトウェア]を選択します) 。コントローラーを再起動して、再起動時に正しいソフトウェアで実行されていることを確認してください。エラーが続く場合は、エクスポートしてアトラスコプコまでお問い合わせください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | コントローラー、ドライブ、同期締付け |
3500 | エラー | 一般ライセンスマネージャーエラー | 使用されている機能管理システムで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3501 | エラー | ライセンスマネージャー同期エラー | ライセンスサーバーとの同期に失敗しました。 | アトラスコプコのサービス担当者までお問い合わせください。 | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3502 | 情報 | ライセンスマネージャー同期完了 | ライセンスサーバーとの同期が完了しました。 | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け | ||
3503 | 警告 | ライセンスマネージャーー:別のソースが使用中 | ライセンスは別のソースによって使用されています。 | ライセンスの割り当てを確認してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け |
3504 | 警告 | ライセンスマネージャーーの再起動が必要です | ライセンスマネージャーーを再起動してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け | |
3505 | 情報 | USB ライセンスの同期が開始しました | USB ライセンスドングルからのライセンスの移動が開始しました。 | ログ | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl PFHC | コントローラー、ドライブ、同期締付け | |
3506 | エラー | USB ライセンスの同期エラー | USB ライセンスドングルからのライセンスの移動に失敗しました。 | アトラスコプコのサービス担当者までお問い合わせください。 | ログ | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl PFHC | コントローラー、ドライブ、同期締付け |
3507 | 情報 | USB ライセンスの同期が終了しました | USB ライセンスドングルからのライセンスの移動が完了しました。 | ログ | Power Focus 6000 Power Focus 8 PFHC | コントローラー、ドライブ、同期締付け | |
3508 | 情報 | 1つまたは複数のライセンスの有効期限が近づいています。ライセンスサーバーが構成されていることを確認してください | ライセンスを更新します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け | |
3510 | エラー | すで使用されているローカルライセンスサーバーがあります。新しいライセンスを構成する前に、すべてのライセンスをサーバーに返してください。 | 構成中に、使用するライセンスで不整合が検出されました。 | ライセンスを更新します。 | ログ ディスプレイ ACK | ToolsControl | コントローラー |
3511 | 警告 | ライセンスの1つに異なるライセンス定義があります | 使用するライセンスで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl PFHC | コントローラー、ドライブ、同期締付け |
3512 | エラー | 予期しないライセンスサービスエラー。さらに支援が必要な場合は、アトラスコプコまでお問い合わせください。 | アトラスコプコの代理店までご連絡ください。 | ログ Conf ディスプレイ ACK | ToolsControl | コントローラー | |
3550 | 警告 | ライセンスがありません | 正しいライセンスをインストールしてください | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl PFHC | コントローラー、ドライブ、同期締付け | |
3551 | 警告 | ライセンスにより無線通信が無効になっています | 仮想ステーションからスタンドアロンライセンスの割り当てを解除します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | コントローラー、ドライブ、同期締付け | |
3600 | 情報 | ユーザーによるシステムの再起動 | 再起動は、次のようなシステム内のユーザーアクションの結果としてトリガーされます。
| ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC | コントローラーとツール | |
3601 | 情報 | 予期しないシステムシャットダウン | システムが予期せず再起動またはシャットダウンした際 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
3610 | 情報 | 停電によるシステムシャットダウン | 電源スイッチが押されているか、コントローラが電源から切り離されている場合 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
3611 | 情報 | バックアップ バッテリータイマーがタイムアウトしたため、シャットダウンしました | ツールが 20 秒間以上バックアップバッテリーで稼働している場合 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
3612 | 情報 | アイドル状態によるシステムシャットダウン | アイドル時間タイムアウトとなった場合 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | コントローラーとツール | |
4010 | 情報 | ツールがデジタル入力によりロックされました。 | ツールは、デジタル入力信号によってロックされました。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | |
4011 | 情報 | Open Protocolによるツールのロック | ツールはOpen Protocolによってロックされています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | |
4012 | 情報 | フィールドバスによってロックされたツール | ツールは、フィールドバスによってロックされました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | 締め付け工程 | |
4013 | 情報 | ソケットセレクタによってロックされているツール | ソケットセレクタが仮想ステーションから切断されると、ツールがロックされます。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 |
4014 | 情報 | ツールがソフト PLC によってロックされています | ソフト PLC 信号によってツールがロックされています。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | 締め付け工程 |
4015 | 情報 | 緩め無効 | 締め付けプログラムで緩めが無効になっています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | 締め付け工程 | |
4016 | 情報 | 締め付け無効 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl XB | 締め付け工程 | ||
4017 | 情報 | 緩めが構成されていません | 選択された締め付けプログラムで緩めが構成されていません | 異なる締め付けプログラムを選択してください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 |
4020 | 情報 | NG締め付けけが多すぎます | バッチ内の連続NG締め付けの最大値を超えています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | |
4021 | 情報 | 連続した緩め回数が多すぎます | 一般仮想ステーションで設定された最大連続緩め回数に達しました | 外部入力は、「緩め回数が多すぎのロックをリセットする」信号または「マスターアンロック」信号でロックを解除してリセットする必要があります。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期 PFXC ツール管理 | グループ |
4025 | 情報 | 締め付けプログラムが選択されていません | 締め付けプログラムが選択されていません。 | 締め付けプログラムまたはバッチシーケンスを選択します。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 |
4030 | 情報 | バッチシーケンスが中止されました | バッチシーケンスが中止されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | 締め付け工程 | |
4031 | 情報 | バッチシーケンスを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4032 | 情報 | 最初の締め付けを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4035 | 情報 | ライン制御によりロック | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | ||
4040 | 情報 | 代替識別子によりロックされました | 代替識別子によりツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4050 | 無効なソケット構成 | 複数のソケットに締め付けプログラムが割り当てられています。 | 複数のソケットに締め付けプログラムが割り当てられています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4060 | 情報 | ツールがバッチ完了でロックされました | バッチシーケンス完了でフラグツールロックを使用してバッチを実行すると、ユーザーがトリガーを押した際にこのイベントが生成されます。 | 完了で信号のロック解除ツールを使用してロックを解除します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 |
4062 | 情報 | 結果の同期によりツールがロックされました | ツールからの結果がコントローラーと同期中です。 | 結果の同期が完了するまで待ってから作業を再開してください。 | ログ ディスプレイ Conf ACK | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 |
4063 | 情報 | トランスデューサーの冗長エラーによりツールがロックされました | 冗長エラーによりツールがロックされました。 | ログ ディスプレイ | Power Focus 6000 ToolsControl | ||
4064 | 情報 | 自動化ルールによりツールがロックされました | ツールは自動化ルールによってロックされました。 | アクションなし | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
4070 | 情報 | プロセスが手動モードに入りました | 仮想ステーションで手動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4071 | 情報 | プロセスが自動モードに入りました | 仮想ステーションで自動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4072 | 情報 | テストボルト | Conf | Flex 同期締め付け | 締め付け工程 | ||
4073 | 情報 | ツールのゼロ位置が更新されました | ツールのゼロ位置が信号を使用して設定されていることを示します。 | Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | |
4100 | 警告 | 識別子は受け入れられません:文字列の長さが無効です | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4101 | 警告 | 文字列の選択に失敗しました:複数の一致 | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4102 | 警告 | 文字列の選択に失敗しました:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4103 | 警告 | 識別子は受け入れられません:同じ文字列がすでに受信されています | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4104 | 警告 | 識別子は受け入れられません:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | 締め付け工程 | ||
4500 | 情報 | 結果ドライブエラー | 内部ドライブエラーまたはドライバ喪失が検出されました。 | Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4501 | 情報 | 結果リヒット | リヒット検出がオンのときにすでに締め付けたボルトを締め付ける試み。 | 開始段階のステップカテゴリをソフトスタートに設定する必要があります。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 |
4502 | 情報 | 結果ソフトスタートトルク低 | 最小レベル未満のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4503 | 情報 | 結果ソフトスタートトルク高 | 最大レベル超過のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4504 | 情報 | 結果セルフタップトルク高 | セルフタップトルク最大レベルを超過しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4505 | 情報 | 結果セルフタップトルク低 | 最小限度未満のセルフタップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4506 | 情報 | 結果安全トルク低 | トルクセンサーを正しく取り付けるための自動的に計算したトルク値。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4507 | 情報 | 結果ランダウントルク高 | 最大レベル超過のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4508 | 情報 | 結果ランダウン角度高 | 最大レベル超過のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4509 | 情報 | 結果ランダウン時間高 | 最大制限超過のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4510 | 情報 | 結果ランダウン時間低 | 最小制限未満のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4511 | 情報 | 結果ランダウントルク低 | 最小レベル未満のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4512 | 情報 | 結果ランダウン角度低 | 最小レベル未満のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4513 | 情報 | 結果最終トルク高 | 最大レベル超過の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4514 | 情報 | 結果最終角度高 | 最大レベル超過の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4515 | 情報 | 結果最終トルク低 | 最小レベル未満の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4516 | 情報 | 結果最終角度低 | 最小レベル未満の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4517 | 情報 | 結果締め付けタイムアウト | 締め付け時間制限が超過しました。一般的な締め付け戦略での、最大締め付け時間は30秒です。マルチステップの最大締め付け時間は、ステップ制限の最大時間によって異なります。エラーコードは締め付け段階によって異なります。 | 締め付けの再実行。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 |
4518 | 情報 | 結果トリガー喪失 | 目標に達する前にツールトリガーがリリースされました。 一般的な締め付け戦略で、締め付け段階が終了する前にトリガーを解除することは許可されていません。 マルチステップでは、特定のステップの目標に達する前にトリガーが解除されると、エラーが表示されます。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4519 | 情報 | 早期のトルク喪失 | ソケットがナットから脱落しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4520 | 情報 | 結果最終ステップ前にターゲットに到達 | 締め付けプログラムの最終ステップの前にターゲットトルクに達しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4521 | 情報 | 結果ポストビュートルク低 | 最小レベル未満のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4522 | 情報 | 結果ポストビュートルク高 | 最大レベル超過のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4523 | 情報 | 結果ポストビュートルク間隔に達していません | ポストビュートルク間隔に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4524 | 情報 | 結果トルク補正間隔に達していません | ランダウン終了前にトルク補正間隔角度に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4525 | 情報 | ツールの動き超過の結果です | NG 締め付け詳細状態から。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4526 | 情報 | 結果 SafetyCurrMon センサー不一致 | 電流監視エラー。 | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | ||
4527 | 情報 | ツールの動き超過の結果です | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |||
4538 | 情報 | 結果最終監督トルク低 | 最終監督トルクに達しませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4543 | 情報 | 結果スナッグモニター高 | レンチ専用。モニターが着座レベルを超えていることを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4545 | 情報 | 結果残留トルクなし | レンチ専用。残留トルクがしきい値未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4546 | 情報 | 結果過速度 | レンチ専用。レンチジャイロが、速度が速いために角度を測定できませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4547 | 情報 | 結果有効な緩め | レンチ専用。レンチが予期しない緩めを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4548 | 情報 | 結果最終が目標未満 | 最終トルクが、締め付けプログラムで設定されたターゲットトルク未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4549 | 情報 | TurboTight 時間制限超過 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | ||
4550 | 情報 | 結果ランダウンパルス高 | ランダウンパルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4551 | 情報 | 結果ランダウンパルス低 | ランダウンパルスの最小数に達する前にランダウンが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4552 | 情報 | 結果最終パルス高 | パルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4553 | 情報 | 結果最終パルス低 | パルスの最小数に達する前に締め付けが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4554 | 情報 | シャットオフ高時の電流 | シャットオフ時の電流が電流上限を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4555 | 情報 | シャットオフ低時の電流 | 測定されたシャットオフ電流が電流下限未満でした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4556 | 情報 | 未分類のマルチステップエラー | マルチステップ構成のエラー。多くの場合はツール検証に関するエラーです。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4557 | 情報 | 結果は過負荷です | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | ||
4559 | 情報 | 停止の結果 | このイベントは、外部の停止信号またはロック信号によって進行中の締め付けが中止されたときにトリガーされます。このイベントは、トリガ喪失と外部停止を区別するために導入されました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | 締め付け工程 | |
4600 | 警告 | バッチ締め付けと組み合わせて使用されたデータドロップまたはデータ保持。信号には効果がありません。 | データドロップとデータ保持は、バッチ制御なしのワークタスクでのみサポートされます。信号を使用する必要がある場合は、別のワークタスクを選択してください。 | Flex 同期締め付け | 締め付け工程 | ||
4601 | 情報 | データ保持が有効:信号が低になると、締め付け結果が送信されます。 | Flex 同期締め付け | 締め付け工程 | |||
4602 | 情報 | データドロップが有効:締め付け結果が破棄されます | Flex 同期締め付け | 締め付け工程 | |||
5010 | 警告 | 無効な締め付けプログラムパラメータ値 | 選択した締め付けプログラムのパラメータが無効です。 | パラメータの値を見つけて変更するには、選択した締め付けプログラムの構成をチェックしてください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | プログラム構成 |
5011 | 警告 | ツールでプログラムストレージを準備できませんでした | ツールで現在のプログラムストレージサイズを読み取ったり、更新された (または新しく選択された) プログラムをツールにダウンロードするためのプログラムストレージを準備したりすることはできません。 |
| ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | プログラム構成 |
5020 | 情報 | メイントリガーは有効な開始ソースではありません | プッシュスタートのみ構成され、ユーザーがメイントリガーを押した場合のみ生成されます。ユーザーがプッシュスタートを押すまでに生成されます。 | プッシュスタートを押してツールを開始します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | プログラム構成 |
5030 | 情報 | 締め付けプログラムの複雑度がツールの容量を超えています | 選択された締め付けプログラムが、使用している STB ツールに複雑すぎます。ツールはロックされます。 | 締め付けプログラムの複雑性を低下させるか、別のプログラムを選択してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | プログラム構成 |
6010 | 情報 | 接続アクセサリ | アクセサリがコントローラーに接続されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | アクセサリ | |
6020 | 情報 | 未接続アクセサリ | アクセサリがコントローラーから切断されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | アクセサリ | |
6021 | 警告 | フィールドバスオフライン | フィールドバスとの通信がありません。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC | アクセサリ | |
6030 | 警告 | アクセサリアドレスが競合しています | 同一アドレスのアクセサリが複数接続されています。 | アクセサリのアドレスを変更します。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | アクセサリ |
6040 | 警告 | アクセサリ通信エラー | アクセサリの断続的通信エラーが発生しました。 | ケーブルとコネクタを確認します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | アクセサリ |
6041 | 警告 | フィールドバスエラー | フィールドバスとの通信エラー。 |
| ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け | アクセサリ |
6042 | 警告 | フィールドバスモジュールの不一致 | インストールされたフィールドバスモジュールが構成されたモジュールと一致しません。 | インストールされているモジュールと一致するように構成を変更するか、インストールされているモジュールを正しいものと交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け | アクセサリ |
6043 | 警告 | フィールドバス出力バッファオーバーフロー | フィールドバス通信に使用されている出力バッファが使い果たされ、バッファのオーバーフローが発生しました。1つ以上の信号更新が破棄されました。 | フィールドバス通信とフィールドバス診断 (使用されている場合) を停止して、バッファを回復します。 このイベントが頻繁に発生する場合は、PLCプログラムを含むフィールドバス通信の設定を確認してください。更新間隔と比較して更新が多すぎると、このシナリオが発生する可能性があります。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け | アクセサリ |
6044 | 警告 | フィールドバス プロバイダーIDの不一致 | インストールされているフィールドバスモジュールはサポートされていません。 | サポートされているAtlas Copcoフィールドバスモジュールを接続します。 | ログ ディスプレイ ACK | Power Focus 8 | アクセサリ |
6050 | 情報 | 間違ったソケットが選択されました | ソケットが選択されていないか、間違ったソケットが選択された場合に生成されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | アクセサリ | |
6090 | 警告 | バーコードスキャナが特定できませんでした | 固有のシリアル番号が見つからない場合。 | バーコードリーダーのデバイスを構成します。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC | アクセサリ |
6500 | 警告 | ルールの構成が無効です | マップされた仮想ステーションが存在しない場合、停止構成が無効である場合、またはルールにトリガーもアクションもない場合、ルール構成は無効になります | ツールの構成を確認します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
6501 | 警告 | 実行中にルールがトリガーされました | 実行中のルールが、同じトリガーによって再トリガーされました。 | ルールを無効にしてから有効にします。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
6502 | 情報 | アクションの実行に失敗しました | 削除された仮想ステーションまたは存在しない仮想ステーションでアクションを実行できなかった場合、ルールはイベントの実行に失敗します。これは、ルールに構成された仮想ステーションが削除された場合に発生します。 | アクションを修正し、ルールを無効にしてから有効にしてください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
6503 | 警告 | 実行中のルールが削除されました | このイベントは、現在実行中のルールが削除された場合に発生します。実行中のルールが削除されても、アクションはリセットされません。 | アクションなし。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
6504 | 警告 | 実行中のルールが無効化されました | このイベントは、現在実行中のルールが無効化された場合に発生します。実行中のルールが無効化されても、アクションはリセットされません。 | アクションなし。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
6505 | 警告 | 実行中のルールが更新されました | 現在実行中のルールが更新されると、ルール更新イベントが実行されます。 | アクションなし。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | |
7010 | 情報 | 表示するメッセージのテキスト | メッセージを表示する一般的イベントです。 | ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC PFHC ToolsControl | メッセージ | |
8200 | 情報 | シリアルポートを開くことができませんでした | 使用するシリアルポートを開くことができませんでした。 | シリアルポートの接続を確認してください。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | その他 |
8300 | 警告 | オープンプロトコルクライアントの通信がタイムアウトしました | オープンプロトコルクライアントへの通信がタイムアウトしました。予想される時間内にキープアライブメッセージまたはコマンドは送信されませんでした。 |
| ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 同期締め付け Power Focus XC ToolsControl | その他 |
8214 | エラー | EHMI ソフトウェアバージョンが一致していません | EHMIソフトウェアのバージョンがコントローラーとの互換性において一致しません。 | EHMIのソフトウェアバージョンを更新してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC ToolsControl | その他 |
Conf - イベントコードのリスト
次に利用可能 - イベントコードのリスト
イベントコードが利用可能な製品のリスト。
グループ - イベントコードのリスト
イベントコードが属するグループ。
イベントの説明
イベントの簡単な説明と、それが起こった理由。
手順 - イベントコードのリスト
該当する場合、手順には、イベントを消去する方法についての指示が含まれます。
ログ - イベントコードのリスト
イベントがイベントログに保存されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
ディスプレイ - イベントコードのリスト
イベントが画面で表示されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
Ack - イベントコードのリスト
続行する前にイベントを確認しなければならないかどうかをユーザーに通知します。このリストの値はデフォルト値です。
イベントコード
一意のイベント番号。
イベントの種類 - イベントコードリスト
イベントの種類:情報、警告、およびエラー。
イベント名
イベントの簡単な名前
フィールドバスで使用される入力信号
コード | 入力信号 | タイプ | 説明 | PF 6000 | PF 600 |
|---|---|---|---|---|---|
20020 | フィールドバスロック締め付け | 状態 | イベントの確認 | X |
|
20021 | フィールドバスロック緩め | 状態 | ロックページで定義されるほとんどのロックを解除します。 | X |
|
30000 | ツールを無効にする | 状態 | ツールを無効にする。 | X | X |
30001 | イベントコード | 状態 | イベントコード | X | X |
30002 | フィールドバスキープアライブ | 状態 | フィールドバスキープアライブ | X | X |
30003 | イベントコードの重要度 | 状態 | イベントコードの重要度 | X | X |
31000 | 締め付け OK | 状態 | 締め付け OK。 | X | X |
31001 | 締め付け NG | 状態 | 締め付け NG。 | X | X |
31002 | 最終トルク | 状態 | 最終トルク。 | X | X |
31003 | 最終角度 | 状態 | 最終角。 | X | X |
31004 | 締め付けプログラム最大角度 | 状態 | 締め付けプログラム最大角度。 | X | X |
31005 | 締め付けプログラム最小角度 | 状態 | 締め付けプログラム最小角度。 | X | X |
31006 | 最終角度ステータス | 状態 | 最終角度ステータス。 | X | X |
31007 | 締め付けプログラム最大トルク | 状態 | 締め付けプログラム最大トルク。 | X | X |
31008 | 締め付けプログラム最小トルク | 状態 | 締め付けプログラム最小トルク。 | X | X |
31009 | 最終トルクステータス | 状態 | 最終トルクステータス。 | X | X |
31039 | ランダウン角度高 | イベント | ランダウン角度高 | X | X |
31040 | ランダウントルク低 | イベント | ランダウントルク低 | X | X |
31027 | 締め付け時間高 | イベント | 締め付け時間高 | X | X |
31028 | 締め付け時間低 | イベント | 締め付け時間低 | X | X |
入力信号
シーケンスの中止 - 10012
バッチシーケンス中止要求が受信されると、バッチシーケンス機能は、進行中の締め付け結果を取得した後にのみバッチシーケンスを中止します。
SoftPLCでの名前:ABORT_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
シーケンスを中止して結果をクリア - 10127
信号「シーケンスを中止して結果をクリア」を設定すると、進行中のシーケンスが中止され、「結果のクリア」に関連する信号がクリアされます。
SoftPLCでの名前: ABORT_SEQ_AND_CLEAR_RES
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
イベントの確認 - 10004
イベントの確認。
SoftPLCでの名前:ACKNOWLEDGE_EVENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツールスキャナの有効化 - 10075
外部ソースを通じてツールスキャナを有効化します。
SoftPLCでの名前:ACTIVATE_TOOL_SCANNER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチ減分 - 10002
バッチカウンタを 1 ずつ減分します。
SoftPLCでの名前:BATCH_DECREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチ増分 - 10001
バッチカウンタを 1 ずつ増分します。
SoftPLCでの名前:BATCH_INCREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バイパス識別子 - 10123
文字列受信シーケンスで識別子文字列をバイパスするために使用されるソースバッチ文字列。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
締め付けプログラムのバイパス - 10008
実行中のバッチシーケンスの次の締め付けプログラムをスキップします。
SoftPLCでの名前:BYPASS_PSET
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
チャンネルコマンド - 10054
チャネルコマンドは、個々のツールを禁止し、それらのツールが次の締め付けに含まれるのを防ぐ入力信号です。Sync Mode構成で構成された締め付けプログラムまたはボルト番号を置き換えることも可能です。最大で64チャネルがサポートされています。
SoftPLCでの名前:CHANNEL_COMMAND
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint32 配列 | 1 | 64 |
信号チャネルコマンド -1 0054には、サブ信号が含まれています(詳細については次を参照してください:「入力信号:サブ信号」)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ステップを続行 - 10128
ステップを続行は、待機締め付けステップを停止する入力信号です。
信号が待機タイプとして設定された状態で締め付けが待機締め付けステップに達すると、信号のステップを続行の立ち上がりエッジにより、システム(1つまたは複数のスピンドル)が解放されます。
詳細については、次を参照してください:サブ信号チャンネルコマンド - 10054:ステップを続行。
SoftPLCでの名前 : CONTINUE_STEP
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
データ保持 - 10124
締め付け終了時に信号 DATAHOLD が true に設定されている場合、結果データの送信は停止されます。
SoftPLCでの名前 : DATAHOLD
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
データドロップ - 10125
締め付け終了時に DATADROP が true に設定されている場合、DATADROP 信号は締め付けの結果をドロップします。結果は永続的に保存されたり、ToolsNetやプロトコルアダプタなどのデバイスやクライアントに送信されたりすることはありません。
SoftPLCでの名前 : DATADROP
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
フィールドバスを無効にする - 10049
フィールドバスを無効にします。
SoftPLCでの名前 :DISABLE_FIELDBUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
[締め付けOK] で緩め無効 - 20022
このロック信号は、OK締め付け後の緩めを無効にするために使用されます。
SoftPLCでの名前 :
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:TRUE
インジケータボックス:FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
テストボルトを無効化 - 10057
SoftPLCでの名前: DISABLE_TESTBOLT
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツールを無効化 - 30000
信号が「真」に設定されている場合、ツールはすぐに停止してロックされます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ツールスキャナの無効化 - 10119
信号が設定されている場合にツールトリガーでスキャンすると、ツールのスキャナーを無効にします。スキャンボタンを使用してスキャンすることは可能ですが、スキャン文字列は無視されます。
SoftPLCでの名前 :DISABLE_TOOL_SCANNER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ダイナミック バッチサイズ - 10074
SoftPLCでの名前 :DYNAMIC_BATCH_SIZE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
操作の有効化 - 10055
SoftPLCでの名前 :ENABLE_OPERATION
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
外部 OK - 10063
SoftPLCでの名前 :EXTERNAL_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
PF への フィールドバス AsyncData - 10077
SoftPLCでの名前 :
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 16 | 2048 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
フィールドバスロック緩め - 20021
接続され、サポートされているアクセサリで信号が設定されている場合、緩めを開始すると、仮想ステーションがロックされます。
[ドライブの停止]設定により、フィールドバスロック緩めが「真」に設定されている場合、進行中の緩めは直ちに中止されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
フィールドバスロックの締め付け - 20020
接続され、サポートされているアクセサリで信号が設定されている場合、仮想ステーションは締め付けの開始時にロックされます。
[ドライブの停止]設定により、フィールドバスロック締め付けが「真」に設定されている場合、進行中の締め付けは直ちに中止されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
フラッシュ読み取り結果のキュー - 30005
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ダイナミック バッチサイズのID - 10073
SoftPLCでの名前 :DYNAMIC_BATCH_SIZE_TPID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ロック緩め - 20003
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ロックの締め付け - 20002
ツールがデジタル入力により締め付けのためにロックされました。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
高でロックツール有効 - 20004
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
低でロックツール有効 - 20061
この信号が低いときにツールをロックします。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
手動モード - 10061
手動モードで仮想ステーションを設定するために使用されます。
信号が真(高)の場合、信号101-手動モードは高です。
信号が偽(低)の場合、信号101-手動モードは低です。
SoftPLCでの名前 :SET_MANUAL_MODE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
関連情報
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
マスターロック解除 - 10005
マスターアンロックは、以下の機能や信号のロックを解除する入力信号です。
機能:
締め付けOKで緩め無効
締め付けNOKで緩め無効
締め付け無効化
最大連続 NOK
シーケンス完了でツールをロック
信号:
20001 - 保留中のイベント確認ロック
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20013 - WorkTask ロック締め付け
20014 - WorkTask ロック緩め
20015 - バッチ完了lロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20022 - 締め付けOKで緩め無効
20023 - NG締め付けが多すぎるロック
20033 - ラインコントロールロック
20034 - 代替識別子によりツールがロックされました
SoftPLCでの名前 :MASTER_UNLOCK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
パルス停止 - 10030
この信号が生成されると、進行中の締め付けまたは緩めが停止します。10024 または 10072と組み合わせて使用します。
SoftPLCでの名前 :TIGHTENING_STOP_PULSE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
結果の読み取りハンドシェイク 確認 - 30004
フィールドバスデバイスで結果の読み取りハンドシェイク機能を有効にして、後部結果のハンドシェイク確認の信号にコントローラを使用できるようにします。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
すべての識別子をリセット - 10115
ソースバッチ文字列において、文字列受信シーケンスから受信したすべての文字列識別子を一度にリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_ALL_IDENTIFIERS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチのリセット - 10003
バッチカウンタを 0 にリセットします。バッチ OK なし(nxOK)。バッチOKが有効化された場合、無効化されます。
SoftPLCでの名前 :RESET_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチシーケンスのリセット - 10053
バッチシーケンスをリセットします。完了時にツールをロックによってロックされているツールのロックを解除します。
SoftPLCでの名前 :RESET_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
双安定リレーをリセット - 10022
双安定リレー出力をリセットします。
SoftPLCでの名前 :RESET_BISTABLE_RELAY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクルステータスのリセット - 10056
SoftPLCでの名前 :RESET_CYCLE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
最新の識別子をリセット - 10114
ソースバッチ文字列において、文字列受信シーケンスから受信した最新の文字列をリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_LATEST_IDENTIFIER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
リレーをリセット - 10120
すべての信号をリセットします。
SoftPLCでの名前 :RESET_RELAYS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
シーケンスステータスのリセット - 10118
バッチシーケンスの完了/OK/NGおよびシーケンス中止の信号をリセットします。
SoftPLCでの名前 :RESET_SEQUENCE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
システムエラーのリセット - 10062
SoftPLCでの名前 :RESET_SYSTEM_ERROR
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
多すぎるNGをリセット - 10013
[多すぎるNG] ロックを受けた後にバッチをリセットします
SoftPLCでの名前 :RESET_TOO_MANY_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力の選択 - 10020
シーケンス内のソース締め付け/バッチから締め付けプログラムを選択します。
SoftPLCでの名前 :SELECT_INPUT_VALUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
入力と動的バッチサイズの選択 - 30007
「外部バッチコントロール」を実行しているソース締め付けタスクにおいて、特定の「識別子番号」のバッチサイズを設定するために使用されます。
バッチサイズは1〜250に設定できます。
バッチサイズを0に設定すると、無限バッチとして扱われます。一度設定すると、ユーザーはバッチの設定を解除してサイズのない状態に戻すことはできません。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 16 | 16 |
TreatZeroAsOne | 状態 | 整数 | 16 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
入力ビット0を選択 - 10016
SoftPLCでの名前 :SEL_INPUT_BIT_0
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット1を選択 - 10017
SoftPLCでの名前 :SEL_INPUT_BIT_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット2を選択 - 10018
SoftPLCでの名前 :SEL_INPUT_BIT_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット3を選択 - 10019
SoftPLCでの名前 :SEL_INPUT_BIT_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット4を選択 - 10066
SoftPLCでの名前 :SEL_INPUT_BIT_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット5を選択 - 10067
SoftPLCでの名前 :SEL_INPUT_BIT_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット6を選択 - 10068
SoftPLCでの名前 :SEL_INPUT_BIT_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット7を選択 - 10069
SoftPLCでの名前 :SEL_INPUT_BIT_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット8を選択 - 10070
SoftPLCでの名前 :SEL_INPUT_BIT_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力ビット9を選択 - 10071
SoftPLCでの名前 :SEL_INPUT_BIT_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
緩めを選択 - 10029
既定の動作モードとして緩めを選択し、スタートツール(- 10028 信号)と組み合わせて使用します。
SoftPLCでの名前 :SELECT_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
関連情報
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
次の識別子番号を選択 - 10116
仮想ステーションのタスクが次のように構成されている場合は、[次の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「次の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「次の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:1、2、4、5、1、2、4…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、次の識別番号を選択します。
選択は、現在選択されているID番号から次に大きいID番号へと続きます。
最大の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に大きい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
識別子番号がソース締め付けリストに追加されていても、締め付けプログラムが割り当てられていない場合、ソース締め付けリストをループしている間、その番号はスキップされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「次の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「次の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「次の識別子番号を選択」信号が繰り返され、1、2、4、8、0、1、2 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「次の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_NEXT_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
前の識別子番号を選択 - 10117
仮想ステーションのタスクが次のように構成されている場合は、[前の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「前の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「前の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:5、4、2、1、5、4、2…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、前の識別番号を選択します。
選択は、現在選択されているID番号の前の小さいID番号へと続きます。
最小の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に小さい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「前の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「前の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「前の識別子番号を選択」信号が繰り返され、8、4、2、1、0、8、4 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「前の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_PREVIOUS_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
双安定リレーの設定 - 10021
双安定リレー出力を設定します。
SoftPLCでの名前 :SET_BISTABLE_RELAY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
CCW 方向に設定 - 10132
[CCW 方向に設定] は、SR21/SL ツールを反時計回りに強制する入力信号です。
SR21/SL ツールは、コントローラに接続した後に信号が「高」に設定されている場合にのみ、反時計回りに強制されます。
SR21/SL ツールがコントローラに接続される前に信号が「高」に設定されていても、この操作は必須です。
ツールが時計回りに作動している場合、信号は方向を反時計回りに切り替えます。
ツールが反時計回りに回転している場合、方向は変わりません。
CCW 方向に設定 は 次の実行でCW/CCWを切り替え 入力信号をオーバーライドします。
信号が「低」に設定されている場合、ツールは方向を時計回りに切り替えます。
ツールを反時計回りに設定すると、ツールのオレンジ色の方向 LED が点灯します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ゼロ位置を設定 - 10135
ハンドヘルドツールの場合、入力信号 ゼロ位置を設定 はツールの現在の位置をホームポジションとして保持します。進行中の締め付け中に信号が送信された場合、信号はそのまま無視されます。
固定式ツールの場合、入力信号 ゼロ位置を設定 はツールの現在の位置をホームポジションとして保持します。信号は、仮想ステーションに関係なく、システム内のすべてのツールに影響します。信号は、進行中の締め付けの一部である固定式ツールによってそのまま無視されます。
SoftPLCでの名前: IN_EXTERNAL_SET_ZERO_POSITION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ソケットセレクタ外部緑色ライト - 10046
ソケットセレクタが外部モードのときに緑色のライトを制御します(複数の物理デバイスが論理ソケットにどのようにマッピングされるかは、ソケットセレクタリソース構成で定義されます)。
バイト0 - 論理ソケット 1-4
バイト1 - 論理ソケット 5-8
バイト2 - 論理ソケット 9-12
バイト3 - 論理ソケット 13-16
バイト4 - 論理ソケット 17-20
バイト5 - 論理ソケット 21-24
バイト6 - 論理ソケット 25-28
バイト7 - 論理ソケット 29-32
ソケットあたり2ビット、00 =オフ、01 =点滅、10 =常時点灯
SoftPLCでの名前 :SOCKET_SEL_EXT_GREEN_LIGHT
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint64 | 1 | 64 |
SocketLedControlTwoDevices | 状態 | uint64 | 1 | 64 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ソケットセレクタ外部赤色ライト - 10047
ソケットセレクタが外部モードのときに赤色のライトを制御します(複数の物理デバイスが論理ソケットにどのようにマッピングされるかは、ソケットセレクタリソース構成で定義されます)。
バイト0 - 論理ソケット 1-4
バイト1 - 論理ソケット 5-8
バイト2 - 論理ソケット 9-12
バイト3 - 論理ソケット 13-16
バイト4 - 論理ソケット 17-20
バイト5 - 論理ソケット 21-24
バイト6 - 論理ソケット 25-28
バイト7 - 論理ソケット 29-32
ソケットあたり2ビット、00 =オフ、01 =点滅、10 =常時点灯
SoftPLCでの名前 :SOCKET_SEL_EXT_RED_LIGHT
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint64 | 1 | 64 |
SocketLedControlTwoDevices | 状態 | uint64 | 1 | 64 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
緩め開始 - 10011
アクティブ信号で緩めを開始します。デジタル入力が非アクティブになると、緩めを停止する必要があります。
SoftPLCでの名前 :START_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
緩め開始、パルス - 10072
SoftPLCでの名前 :SELECT_PREVIOUS_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
締め付け開始 - 10010
アクティブ信号で締め付けを開始します。入力が非アクティブになると、締め付けを停止する必要があります。
SoftPLCでの名前 :START_TIGHTENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
緩め開始 パルス - 10024
締め付けが信号で開始します。締め付けが終了するまで、または締め付けプログラムで 30 秒間のタイムアウトが発生するまで実行します。
SoftPLCでの名前 :TIGHTENING_START_PULSE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツールの開始 - 10028
ツールを始動させる有効信号(デフォルトの動作モードは締め付けです)。信号が非アクティブになると、すぐにツールを停止する必要があります。緩めを選択 - 10029 信号と組み合わせて使用します。
SoftPLCでの名前 :START_DRIVE_CONTINIOUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツール開始、パルス - 10113
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
停止(パルス) - 10129
この信号が生成されると、進行中の締め付けまたは緩めが停止します。10024 または 10072と組み合わせて使用します。
SoftPLCでの名前: EXTERNAL_STOP_PULSE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
停止(状態) - 10133
この信号が設定されると、進行中の締め付けまたは緩めが停止します。また、高に設定されている間は、すべての開始試行をブロックします。10024 または 10072と組み合わせて使用します。
SoftPLCでの名前: IN_EXTERNAL_STOP_STATE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
SoftPLCへ - 10065
SoftPLCでの名前 :TO_PLC
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
CW/CCW 切り替え - 10130
CW/CCW 切り替え SR21/SL ツールの方向を切り替える入力信号です。
ツールが時計回りに作動している場合、信号は方向を反時計回りにトグルします。
ツールが反時計回りに実行されている場合、信号は方向を時計回りに切り替えます。
CW/CCW 切り替えは、入力信号 次の実行で CW/CCW を切り替えを無効にします。
ツールを反時計回りにトグルすると、ツールのオレンジ色の方向 LED が点灯します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
次の実行でCW/CCWを切り替え - 10131
次の実行で CW/CCW を切り替え は、次の締め付け/緩めで SR21/SL ツールの方向を切り替える入力信号です。
ツールが時計回りに作動している場合、信号は方向を反時計回りにトグルします。
ツールが反時計回りに実行されている場合、信号は方向を時計回りに切り替えます。
次の締め付け/緩めが完了すると、ツールは信号が送信される前の方向に戻ります。
次の締め付け/緩めでツールを反時計回りに切り替えると、ツールのオレンジ色の方向 LED が点滅します。
次の実行で CW/CCW を切り替え 信号を 1 回だけトリガすることができます 。
信号がツールの方向をトグルすると、この信号のその他の更新は無視されます。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
完了時にツールをロック解除 - 10051
「完了時にツールをロック」によってロックされているツールのロックを解除します。
SoftPLCでの名前 :UNLOCK_TOOL_ON_COMPLETE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
無効時にツールのロック解除 - 10059
SoftPLCでの名前 :UNLOCK_TOOL_ON_DISABLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
出力信号
有効な識別子の文字列 - 186
識別子の文字列が作業タスクによって受信され、受け入れられたときに設定されます。シーケンスまたは締め付けプログラムが実行されている必要があります。
ソースバッチシーケンスが実行されている場合、すべてのスキャンが受信され、シーケンスが選択されたときに設定されます。その場合、保存位置で構成された連結文字列が含まれます。
他の作業タスクの場合、「VIN」番号が含まれます。
SoftPLCでの名前 :ACTIVE_IDENTIFIER_STRING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
有効な識別子の文字列 1 - 188
ソースバッチ文字列の最初に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列1信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
有効な識別子の文字列 2 - 189
ソースバッチ文字列の2番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列2信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
有効な識別子の文字列 3 - 190
ソースバッチ文字列の3番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列3信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
有効な識別子の文字列 4 - 191
ソースバッチ文字列の4番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列4信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
バッチ完了 - 30
「バッチ完了」は、バッチが完了したときにトリガーされる出力信号です。
バッチ結果のステータス(OKまたはNG)は、バッチ完了信号には影響しません。
SoftPLCでの名前 :BATCH_COMPLETED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ完了 NG - 37
バッチは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ完了 OK - 36
バッチは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチカウント - 31
バッチカウントは、バッチ内の現在の締め付け回数を示す出力信号です。
SoftPLCでの名前 :BATCH_COUNT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
バッチ実行中 - 32
バッチシーケンス内のバッチが実行中であることを示します。
SoftPLCでの名前 :BATCH_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ シーケンス完了 NG - 46
バッチシーケンスは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチシーケンス完了 OK - 45
バッチシーケンスは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ シーケンス終了 - 48
シーケンスがいつ完了したかを示します。バッチシーケンス完了OKとバッチシーケンス完了NGの両方の場合です。
SoftPLCでの名前 :BATCH_SEQUENCE_COMPLETED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | ブール値 | 1 | 1 |
反転 | イベント | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチシーケンス実行中 - 47
バッチシーケンスが実行中かどうかを示します。
SoftPLCでの名前 :BATCHSEQUENCE_RUNNING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
双安定リレー - 40
双安定リレーは、「双安定リレーの設定」と「双安定リレーのリセット」の入力によって制御される信号です。
入力「双安定リレーの設定」を受信した後、双安定リレー信号は真に設定されます。
入力「双安定リレーのリセット」を受信した後、双安定リレー信号は偽に設定されます。
「双安定リレーの設定」または「双安定リレーのリセット」が低になった場合、双安定リレーはその状態を維持します。
「双安定リレーの設定」または「双安定リレーのリセット」が高になると、双安定リレーの状態が変化します。
コントローラを再起動すると、双安定リレーはデフォルトで偽に設定されます。
SoftPLCでの名前 :BISTABLE_RELAY
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ボルトの締め付け状態 - 79
「ボルト締め付け状態」は、同期締め付けにおける個々のボルトの状態を識別する出力信号です。100本のボルトがサポートされています。
「ボルト締め付け状態」信号は、実行中の締め付けと最後の締め付けの結果に関連する情報を示します。
SoftPLCでの名前: BOLT_TIGHTENING_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint32 配列 | 32 | 32 |
FordResultStatus | 状態 | 4 | 4 | |
CompactErrorstatus | 状態 | 4 | 4 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
信号ボルト締め付け状態 - 79には、サブ信号が含まれています(詳細については次を参照してください:「出力信号:サブ信号」)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
校正アラーム - 138
ツールメンテナンス構成からのキャリブレーションアラーム。ツールのキャリブレーション時期を知らせる通知を提供します。
SoftPLCでの名前 :CALIBRATION_ALARM
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
チャンネルのハードウェア状態 - 81
「チャンネルのハードウェア状態」は、個々のチャンネルのハードウェアステータスを識別する出力信号です。64チャンネルがサポートされています。
「チャンネルのハードウェア状態」信号は、ハードウェアステータスに関する情報と可能性としてのエラーを示します。
SoftPLCでの名前 :CHANNEL_HARDWARE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint32 配列 | 1 | 64 |
信号チャンネルのハードウェア状態 - 81には、サブ信号が含まれています(詳細については次を参照してください:「出力信号:サブ信号」)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
チャンネルの締め付け状態 - 80
「チャンネルの締め付け状態」は、同期締め付けにおける個々のチャンネルの状態を識別する出力信号です。64チャンネルがサポートされています。
「チャンネルの締め付け状態」信号は、実行中の締め付けと最後の締め付けの結果に関連する情報を示します。
SoftPLCでの名前: CHANNEL_TIGHTENING_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint32 配列 | 1 | 64 |
FordResultStatus | 状態 | 4 | 4 | |
CompactErrorstatus | 状態 | 4 | 4 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
信号チャンネルの締め付け状態 - 80には、サブ信号が含まれています(詳細については次を参照してください:「出力信号:サブ信号」)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
構成バージョン - 88
SoftPLCでの名前 :CONFIGURATION_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
緩みを確認 - 206
緩めが選択されているかどうか、開始可能かどうかを示します。つまり、緩め同期モードまたは緩めプログラムが存在し、選択されているかどうかです。
SoftPLCでの名前: CONFIRM_LOOSENING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
コントローラスイッチオン - 42
IO Exchange の起動時に真に設定します。
SoftPLCでの名前 :IO_ON
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
現在実行中のバッチ - 180
現在実行中のバッチは、現在実行中のバッチのインデックスをシーケンスで示す出力信号です。
ユーザーがソケットセレクターを使用している場合、選択されているソケットがない、複数ある、または間違っていると、「ゼロ」が表示されます。
ユーザーがバッチモードを使用していて、バッチが実行されている場合、ソース締め付け構成に「1」が表示されます。
SoftPLCでの名前 :CURRENT_RUNNING_BATCH_IX
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
サイクル完了 - 77
SoftPLCでの名前 :CYCLE_COMPLETE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクルが非常停止しました - 202
最後の締め付けまたは緩めが非常停止によって中断されたことを示します。
SoftPLCでの名前: CYCLE_EMERGENCY_STOPPED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクル NG - 76
SoftPLCでの名前 :CYCLE_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクル OK - 75
SoftPLCでの名前 :CYCLE_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクルの開始準備完了 - 82
SoftPLCでの名前 :CYCLE_READY_TO_START
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
サイクル実行中 - 78
SoftPLCでの名前 :CYCLE_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
データドロップ有効 - 199
この信号は、DATADROP 機能がアクティブなときは常に「高」に設定されます。DATADROP 信号が設定されており、DATADROP をサポートするワークタスクを選択した場合。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
データ保持有効 - 198
この信号は、DATAHOLD 機能がアクティブなときは常に「高」に設定されます。DATAHOLD 信号が設定されており、DATAHOLD をサポートするワークタスクを選択した場合。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
方向スイッチ CCW - 13
ツールの方向スイッチを反時計回り方向に回します。
SoftPLCでの名前 :DIRECTION_SWITCH_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
方向スイッチ CW - 12
ツールの方向スイッチを時計回り方向に回します。
SoftPLCでの名前 :DIRECTION_SWITCH_CW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
非常停止 - 20036
SoftPLCでの名前 :EMERGENCY_STOP
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
イベントコード - 30001
トリガされたときにイベントをリレーします。瞬時、2サイクルタイム分オンになります。
SoftPLCでの名前 :EVENT_CODE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
イベントコードの重要度 - 30003
イベントコード重大度は、トリガーされたイベントにエラー重大度または警告がある場合に有効化される出力信号です。
SoftPLCでの名前 :EVENT_CODE_SEVERITY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
イベントが存在 - 161
イベントがトリガーされたかどうかを示します。イベントがACKを必要とする場合のみ、アクセサリでトリガーされます。
SoftPLCでの名前 :EVENT_PRESENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
PF からの フィールドバス AsyncData - 107
SoftPLCでの名前 :
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 48 | 2048 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
フィールドバス切断 - 96
SoftPLCでの名前 :FIELDBUS_DISCONNECTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
最終角度 - 8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 浮動 | 0 | 0 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終角度 - 31003
締め付けサイクルの終了時における実際の測定角度値
SoftPLCでの名前 :FINAL_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終角度ステータス - 31006
この信号は、最終角度のステータスを示します。これは次のようになります:
OK - 測定された角度が締め付けプログラムで構成された制限内にある場合。
HIGH - 測定された角度が締め付けプログラムで設定された上限を超えている場合。
LOW - 測定された角度が締め付けプログラムで設定された下限を下回る場合。
最終角度ステータス信号の値は、フィールドバス信号の構成に応じて異なって表示されます。
ユーザーが信号コンバーターを選択すると、信号は次のいずれかの値を示します:
O - 最終角度ステータス OK。
H - 最終角度ステータス高。
L - 最終角度ステータス低。
フィルタが適用されていない場合、信号は次のいずれかの値を示します。
1 - 最終角度ステータスOK。
2 - 最終角度ステータス高。
3 - 最終角度ステータス低。
SoftPLCでの名前 :FINAL_ANGLE_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 2 | 8 |
StatusAsChar | 状態 | 整数 | 2 | 8 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終測定済み電流 - 31017
最終角度と最終トルクの測定ステップでの電流。結果が利用可能になると送信されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | 整数 | 32 | 32 |
FixedPointToDecimal | イベント | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終ターゲット速度 - 31020
締め付けプログラムの最後のステップの目標速度。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終ターゲットトルク - 31015
実行された締め付けの締め付けプログラムの目標トルクを取得します。値は締め付け結果のプログラムからコピーされ、締め付け後に公開されます。
マルチステッププログラムは、ステップカテゴリ「最終」として定義された締め付けプログラムの最後の締め付けステップから目標トルクを取得します。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | 整数 | 32 | 32 |
FixedPointToDecimal | イベント | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終トルク - 5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 浮動 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終トルク - 31002
締め付けサイクルの終了時における実際の測定トルク値。
SoftPLCでの名前 :FINAL_TORQUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 32 | 32 |
FixedPointToDecimal | 状態 | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終トルクステータス - 31009
この信号は、最終トルクのステータスを示します。これは次のようになります:
OK - 測定されたトルクが締め付けプログラムで構成された制限内にある場合。
HIGH - 測定されたトルクが締め付けプログラムで設定された上限を超えている場合。
LOW - 測定されたトルクが締め付けプログラムで設定された下限を下回る場合。
最終トルクステータス信号の値は、フィールドバス信号の構成に応じて異なって表示されます。
ユーザーが信号コンバーターを選択すると、信号は次のいずれかの値を示します:
O - 最終トルクステータス OK。
H - 最終トルクステータス高。
L - 最終トルクステータス低。
フィルタが適用されていない場合、信号は次のいずれかの値を示します。
1 - 最終トルクステータスOK。
2 - 最終トルクステータス高。
3 - 最終トルクステータス低。
SoftPLCでの名前 :FINAL_TORQUE_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 2 | 8 |
StatusAsChar | 状態 | 整数 | 2 | 8 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最初のターゲットトルク - 31019
締め付け完了後、最初の目標トルクを取得します。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | 整数 | 32 | 32 |
FixedPointToDecimal | イベント | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
SoftPLCから - 10064
PLCからアクセサリへのデータ転送用に割り当てられるバイト。
SoftPLCでの名前 :FROM_PLC
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 8 | 8 |
デバイス
フィールドバス:偽
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
高角度 - 10
角度の結果が高すぎます。
SoftPLCでの名前 :HIGH_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
高トルク - 7
トルクの結果が、最大トルク範囲よりも高い。
SoftPLCでの名前 :HIGH_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
受信識別子 - 100
SoftPLCでの名前 :IDENTIFIER_RECEIVED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
最後のサイクル結果なし - 200
この信号は、締め付けがフリーランと見なされる場合、締め付けが行われた後に設定されます。
SoftPLCでの名前: LAST_CYCLE_NO_RESULT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
最後に受信した識別子の文字列 - 187
作業タスクで識別子を受信したときに直接設定されます。
ソースバッチ文字列の場合、スキャンプロセスのスキャンごとに設定されるため、スキャンごとに変更され、長さが一致しなくても送信されます。
文字列セットは未加工の形式であり、文字列の「保存された位置」だけではありません。
他の作業タスクの場合、この信号は有効な識別子文字列信号と同じです。
SoftPLCでの名前 :LAST_RECEIVED_ID_STRING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
関連情報
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ライセンスサーバー接続が失われました - 134
アトラスコプコのライセンスサーバーへの接続が失われたか、同期に失敗したことを示します。信号は、ライセンスマネージャーの同期が正常に完了するとクリアされます
SoftPLCでの名前 :LICENSE_SERVER_CONN_LOST
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め無効 - 184
緩め無効は、緩めが次の信号のいずれかによって外部的にロックされたときに有効化する出力信号です:
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20021 - フィールドバスロック緩め
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :LOOSENING_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め有効 - 185
緩め有効は、緩めが次の信号のいずれかによって外部的にロックされていないときに有効化する出力信号です:
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20021 - フィールドバスロック緩め
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :LOOSENING_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩めがロック済み - 28
緩めが無効です。
SoftPLCでの名前 :LOOSENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め NG - 74
NG 緩みが行われました。
SoftPLCでの名前 :LOOSENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め OK - 70
OK 緩みが行われました。
SoftPLCでの名前 :LOOSENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
低角度 - 9
角度の結果が、最小角度範囲よりも低い。
SoftPLCでの名前 :LOW_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
低トルク - 6
トルクの結果が、最小トルク範囲よりも低い。
SoftPLCでの名前 :LOW_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
手動モード - 101
サポートされており構成されたアクセサリに、手動モードの仮想ステーションのステータスを示します
SoftPLCでの名前 :MANUAL_MODE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
最大連続 NG になりました - 35
最大干渉 NG 締め付けカウンターに達したことを示します。
SoftPLCでの名前 :MAX_COHERENT_NOK_REACHED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
システムエラーなし - 83
SoftPLCでの名前: NO_SYSTEM_ERROR
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
システム警告なし - 102
SoftPLCでの名前 :NO_SYSTEM_WARNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
オープンエンドが開放位置にあります - 89
オープンエンドツールが開放位置にあります。
SoftPLCでの名前 :OPEN_END_IN_OPEN_POSITION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
オープンプロトコル切断 - 95
仮想ステーションでオープンプロトコルがオフに設定されている場合、「オープンプロトコル切断」信号は偽に設定されます。
仮想ステーションでオープンプロトコルがオンになっている場合、「オープンプロトコル切断」信号は真に設定されます。
少なくとも1つのクライアント(複数のオープンプロトコルクライアントが同じ仮想ステーションに接続可能)が接続されると、「オープンプロトコル切断」信号が偽に設定されます。
SoftPLCでの名前 :OPEN_PROTOCOL_DISCONNECTED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
パススルー識別子 - 104
スキャンされた文字列をスキャナから外部装置に送信する出力信号。
SoftPLCでの名前 :BARCODE_ID_PASSTHROUGH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 文字列 | 8 | 800 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
プログラムの終了 - 168
この信号は、締め付けサイクルが完了したときのトルクレベルを示します。タイマー - プログラム終了タイムアウト - トルクがこのレベルを下回ると開始します。締め付けは、トルクがプログラム終了トルクのレベルを下回ったときに完了し、プログラム終了タイムアウトに達するまでその状態を保ちます。
SoftPLCでの名前 :PROGRAM_END
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
プログラムの開始 - 132
締め付けサイクルの開始レベルを定義します。
SoftPLCでの名前 :PROGRAM_START
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
パルスツールアラームオイルレベルが空 - 167
ツールのメンテナンスで構成されたオイルレベルの監視は、パルスツールでオイルを充填する時期をユーザーに通知するメカニズムを提供します。トリガーが押されても、信号はユーザーに通知されません。
ツールが切断されると、信号はクリアされます。次に、ツールが接続されたときに条件が有効な場合はツールから再度送信されます。
SoftPLCでの名前 :TOOL_OIL_LEVEL_EMPTY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
PVT補正値 - 31029
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | 整数 | 32 | 32 |
FixedPointToDecimal | イベント | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
読み取り結果のキューが点滅しました - 30006
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
開始準備完了 - 29
ツールが仮想ステーションに接続されており、有効な締め付けロックがなく、非常停止が有効でなく、有効な締め付けプログラムが選択されている場合、この信号は締め付けを開始できることを示します。
SoftPLCでの名前 :READY_TO_START
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
受信済み識別子1 - 192
ソースバッチ文字列の最初に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列1信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、1は最初に構成された文字列ではなく、最初に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
受信済み識別子2 - 193
ソースバッチ文字列の2番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列2信号が送信されます。強制順序スキャンで実行している場合は、構成された順序になりますが、自由順序スキャンを実行している場合、2は2番目に構成された文字列ではなく、2番目に受信した文字列に対応します。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
受信済み識別子3 - 194
ソースバッチ文字列の3番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列3信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、3は3番目に構成された文字列ではなく、3番目に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
受信済み識別子4 - 195
ソースバッチ文字列の4番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列4信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、4は4番目に構成された文字列ではなく、4番目に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
リヒット - 31014
SoftPLCでの名前 :FIELDBUS_TIGHTENING_REHIT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
残りのバッチ - 33
バッチ内の残りの締め付け。ディスプレイでのみ表示できます。
SoftPLCでの名前 :REMAINING_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ランダウン角度 - 31038
ランダウン角度の値。
SoftPLCでの名前 :RUNDOWN_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ランダウン角度高 - 165
この信号は、プログラムレベルのランダウン角度が設定された角度よりも高い場合に有効化されます。
SoftPLCでの名前 :RUNDOWN_ANGLE_HIGH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ランダウン角度低 - 166
この信号は、プログラムレベルのランダウン角度が設定された角度よりも低い場合に有効化されます。
SoftPLCでの名前 :RUNDOWN_ANGLE_LOW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
選択した識別番号 - 213
選択した締め付けプログラムの識別番号。識別番号が選択されていない場合は 0。
SoftPLCでの名前: SELECTED_IDENTIFIER_NUMBER
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
選択モード ID - 72
SoftPLCでの名前 :SELECTED_MODE_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 32 |
TreatZeroAsOne | 状態 | 整数 | 1 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
選択されたシーケンスビット 0 - 139
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_0
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 1 - 140
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 2 - 141
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 3 - 142
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 4 - 143
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 5 - 144
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 6 - 145
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 7 - 146
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 8 - 147
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択されたシーケンスビット 9 - 163
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択のシーケンス ID - 84
選択したバッチシーケンスのインデックスを表示します。
SoftPLCでの名前 :SELECTED_BATCH_SEQUENCE_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
選択された締め付けプログラム - 69
選択した締め付けプログラムの実際の ID。締め付けプログラムが選択されなければ 0。
SoftPLCでの名前 :SELECTED_PSET_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
選択された締め付けプログラムビット 0 - 148
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_0
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 1 - 149
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 2 - 150
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 3 - 151
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 4 - 152
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 5 - 153
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 6 - 154
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 7 - 155
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 8 - 156
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
選択された締め付けプログラムビット 9 - 157
選択した締め付けプログラムを示すビットパターン。
SoftPLCでの名前 :SELECTED_PROGRAM_BIT_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: TRUE
シーケンス中止済み - 160
シーケンスが中止されたかどうかを示す出力信号。
SoftPLCでの名前 :SEQUENCE_ABORTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
サービスインジケータアラーム - 137
ツールのメンテナンスで構成されたサービスアラームは、ツールをサービスする時期をユーザーに通知するメカニズムを提供します。
SoftPLCでの名前 :SERVICE_INDICATOR_ALARM
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
シーケンスのサイズ - 181
現在実行中のシーケンスのサイズが表示されます。シーケンスが読み込まれたときにのみ設定され、シーケンスが完了したときにリセットされません。
SoftPLCでの名前 :SIZE_OF_RUNNING_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ソケットセレクタがロックを解除 - 20039
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ソフトウェアメジャーバージョン - 86
SoftPLCでの名前 :SOFTWARE_MAJOR_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ソフトウェアマイナーバージョン - 87
SoftPLCでの名前 :SOFTWARE_MINOR_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ソフトウェアリリースバージョン - 85
実行中ソフトウェアのバージョン。
SoftPLCでの名前 :SOFTWARE_RELEASE_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終角度の開始 - 31016
可能な場合、最終角度の開始トルク値が表示されます。結果が利用可能になると送信されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 32 | 32 |
FixedPointToDecimal | 状態 | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ステーション準備完了 - 71
仮想ステーションの準備がいつ完了するかを示します。
SoftPLCでの名前 :STATION_READY
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
同期モード有効 - 207
選択した同期モードが有効かどうかを示します。つまり、それが存在し、適切に構成されているかどうかです。
SoftPLCでの名前: SYNC_MODE_VALID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
テストボルト作動 - 91
SoftPLCでの名前 :SELECTED_MODE_ID
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ネジ方向 CCW - 26
選択した締め付けプログラムでは、スレッド方向として反時計回りが択されています。
SoftPLCでの名前 :THREAD_DIRECTION_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け日 - 31030
YYYY:MM:DD形式の締め付け日。
SoftPLCでの名前 :TIGHTENING_DATE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 文字列 | 80 | 80 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け日、日 - 31032
締め付けを行った時の日。
SoftPLCでの名前 :TIGHTENING_DATE_DAY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け日、月 - 31033
締め付けを行った時の月。
SoftPLCでの名前 :TIGHTENING_DATE_MONTH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け日、年 - 31034
締め付けを行った時の年。
SoftPLCでの名前 :TIGHTENING_DATE_YEAR
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け無効 - 182
締め付け無効は、締め付けが次の信号のいずれかによって外部的に無効化されたときに有効化する出力信号です:
20002 - ロック締め付け
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20040 - Soft PLCロック締め付け
20061 - 低でロックツール有効
SoftPLCでの名前 :TIGHTENING_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け完了 - 31010
SoftPLCでの名前 :TIGHTENING_DONE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け有効 - 183
締め付け有効は、締め付けが次の信号のいずれかによって外部的に無効化されていないときに有効化する出力信号です:
20002 - ロック締め付け
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20040 - Soft PLCロック締め付け
20061 - 低でロックツール有効
SoftPLCでの名前 :TIGHTENING_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付けがロック済み - 27
締め付けは無効です。締め付けはできません。
SoftPLCでの名前 :TIGHTENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け NG - 4
少なくとも 1 つの締め付けの結果が指定範囲外であることを示します。
SoftPLCでの名前 :TIGHTENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け OK - 3
締め付けの結果が指定範囲内であることを示します。
SoftPLCでの名前 :TIGHTENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付けプログラム最大角度 - 31004
SoftPLCでの名前 :MAX_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付けプログラム最大トルク - 31007
SoftPLCでの名前 :MAX_TORQUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 32 | 32 |
FixedPointToDecimal | 状態 | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付けプログラム最小角度 - 31005
SoftPLCでの名前 :MIN_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 16 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付けプログラム最小トルク - 31008
SoftPLCでの名前 :MIN_TORQUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 32 | 32 |
FixedPointToDecimal | 状態 | 整数 | 32 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け時間 - 31031
hh:mm:ss形式の締め付け時刻。
SoftPLCでの名前 :TIGHTENING_TIME
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 文字列 | 64 | 64 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け時間高 - 135
実行時間が許容最大値を超えたためにNGの締め付けが発生したかどうかを示します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
締め付け時間、時 - 31035
締め付けを行った時の時間。
SoftPLCでの名前 :TIGHTENING_TIME_HOUR
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け時間低 - 136
実行時間が許容最小値を引き下げたことにより、NGの引き締めが発生したかどうかを示します。
締め付け時間低信号は、締め付けプログラムでのみ機能します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
締め付け時間、分 - 31037
締め付けを行った時の分。
SoftPLCでの名前 :TIGHTENING_TIME_MINUTES
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
締め付け時間、秒 - 31036
締め付けを行った時の秒。
SoftPLCでの名前 :TIGHTENING_TIME_SEC
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ツールバッテリー残量低 - 90
SoftPLCでの名前 :TOOL_BATTERY_LOW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
接続ツール - 73
ツールが仮想ステーションに接続されているかどうかを示します。
SoftPLCでの名前 :TOOL_CONNECTED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール無効 - 158
ツール無効は、ツールが次の信号のいずれかによって外部的に無効化されたときに有効化する出力信号です:
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20040 - Soft PLCロック締め付け
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :TOOL_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール有効 - 159
ツール有効は、ツールが次の信号のいずれかによって外部的に無効化されていないときに有効化する出力信号です:
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20040 - Soft PLCロック締め付け
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :TOOL_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール機能ボタンが押されました - 179
機能ボタンの状態を追跡する出力信号。信号は、機能ボタンが押されると設定され、機能ボタンが放されるとクリアされます。バッテリーツールの場合、重要な用途には使用できません。
SoftPLCでの名前 :FUNCTION_BUTTON_PRESSED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツール正常性 OK - 103
ツールエラーが存在しない場合はツール正常性OKが高であり、次のいずれかのツールエラーが設定されている場合はツール正常性OKが低となります。
ツールがオーバーヒート
ツールのモーター調節が必要です。
オープンエンドが調整されていません
ツールパラメータファイルがサポートされていません。
ツールバッテリ低
ツールトリガの監督失敗
ツールケーブルがサポートされていません
ツールメモリー障害
ツールメモリが破損しています。
ツールサービス間隔が過ぎています。
ツールソフトウェアバージョンが一致していません。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール緩め - 22
ツールが緩められていることを示します。
SoftPLCでの名前 :TOOL_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール回転 CCW - 25
ツール回転方向が左スレッドネジで反時計回りです。
SoftPLCでの名前 :TOOL_ROTATION_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール回転 CW - 24
ツール回転方向が右スレッドネジで時計回りです。
SoftPLCでの名前 :TOOL_ROTATION_CW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール実行中 - 23
ツールが回転中(時計回り[CW]または反時計回り[CCW])であることを示します。
SoftPLCでの名前 :TOOL_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツールのシリアル番号の数値 - 31021
シリアル番号の整数部分。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 32 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ツールタグ識別子 - 94
SoftPLCでの名前 :TOOLTAG_IDENTIFIER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ツール締め付け - 21
ツールが締め付けられていることを示します。
SoftPLCでの名前 :TOOL_TIGHTENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ゼロ位置にあるツール - 210
出力信号 ゼロ位置にあるツール は、ハンドヘルドツールでのみ使用できます。
出力信号 ゼロ位置にあるツール は、ツールがホームポジションにあるかどうか (たとえば、正転または逆転位置ステップの終了時など) を定義します。
信号はリアルタイムで更新されないため、何らかの理由でツールが所定の位置から外れた場合、信号は機能しません。
SoftPLCでの名前: TOOLS_IN_ZERO_POSITION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ToolsNet 接続が失われました - 133
ToolsNetとコントローラー間の有効な接続が中断されたか、期待どおりに機能しているかを示します。
SoftPLCでの名前: TOOLSNET_CONNECTION_LOST
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け合計回数 - 31018
ツールがその全寿命にわたって実施した締め付け回数の総数。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 8 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
残りシーケンスカウンタ合計 - 205
バッチシーケンスで完了する残りの締め付け回数。
SoftPLCでの名前: TOTAL_REMAINING_SEQ_COUNT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
シーケンスカウンタ合計 - 204
バッチシーケンスで完了した締め付け回数。
SoftPLCでの名前: TOTAL_SEQ_COUNTER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
シーケンスサイズの合計 - 203
バッチシーケンスで完了する残りの締め付け合計回数。
SoftPLCでの名前: TOTAL_SEQ_SIZE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
入出力拡張器: FALSE
オペレータパネル: FALSE
ST セレクタ:TRUE
スタックライト: FALSE
ツール機能:FALSE
TLS タグ:FALSE
トリガが押されました - 11
ツールトリガが押されたことを示します。
SoftPLCでの名前 :TRIGGER_PRESSED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
続行の待機中 - 201
「続行の待機中」は出力信号です。これは、条件信号が待機タイプとして構成された状態で、締め付けが待機締め付けステップに到達したことを意味します。
システム(1つまたは複数のスピンドル)は、次の信号を待って締め付けを一時停止します:ステップを続行 - 10128 (システムリリースの場合)またはサブ信号チャンネルコマンド - 10054:ステップを続行 (個々のスピンドルリリースの場合)。
詳細については、次を参照してください:サブ信号ボルト締め付け状態 - 79:続行の待機中およびチャンネルの締め付け状態 - 80:続行の待機中。
SoftPLCでの名前 : WAITING_FOR_CONTINUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
仮想ステーション名 - 105
仮想ステーション名を表示します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
入出力信号
結果のクリア - 39
次の締め付けに設定された他の信号のステータスをクリアします。
SoftPLCでの名前 :CLEAR_RESULTS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
オープンプロトコルコマンドを無効化 - 10060
オープンプロトコルを介して仮想ステーションにコマンドを送信する機能を無効にします。
SoftPLCでの名前 :DISABLE_OPEN_PRTCOL_CMDS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部識別子 - 10045
外部識別子で送信された文字列は、VIN番号として結果に含まれます。タスク選択のためにフィールドバスから渡される識別子を最大で2個まで提供することが可能です。
SoftPLCでの名前 :EXTERNAL_IDENTIFIER
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
外部監視 1 - 10035
外部監視1は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 2 - 10036
外部監視2は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 3 - 10037
外部監視3は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 4 - 10038
外部監視4は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 5 - 10039
外部監視5は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_5
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 6 - 10040
外部監視6は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_6
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 7 - 10041
外部監視7は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_7
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 8 - 10042
外部監視8は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_8
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
フィールドバスキープアライブ - 30002
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
フラッシュツール緑 LED(外部プロトコル) - 10058
SoftPLCでの名前 :FLASH_TOOL_GREEN_LED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
汎用 I/O 1 - 50
オープンプロトコルに使用される入出力 1。
SoftPLCでの名前 :GENERIC_IO_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 10 - 59
オープンプロトコルに使用される入出力 10。
SoftPLCでの名前 :GENERIC_IO_10
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 2 - 51
オープンプロトコルに使用される入出力 2。
SoftPLCでの名前 :GENERIC_IO_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 3 - 52
オープンプロトコルに使用される入出力 3。
SoftPLCでの名前 :GENERIC_IO_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 4 - 53
オープンプロトコルに使用される入出力 4。
SoftPLCでの名前 :GENERIC_IO_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 5 - 54
オープンプロトコルに使用される入出力 5。
SoftPLCでの名前 :GENERIC_IO_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 6 - 55
オープンプロトコルに使用される入出力 6。
SoftPLCでの名前 :GENERIC_IO_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 7 - 56
オープンプロトコルに使用される入出力 7。
SoftPLCでの名前 :GENERIC_IO_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 8 - 57
オープンプロトコルに使用される入出力 8。
SoftPLCでの名前 :GENERIC_IO_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 9 - 58
オープンプロトコルに使用される入出力 9。
SoftPLCでの名前 :GENERIC_IO_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 1 - 169
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 10 - 178
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_10
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 2 - 170
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 3 - 171
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 4 - 172
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 5 - 173
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 6 - 174
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 7 - 175
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 8 - 176
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
一般的な立ち上がりエッジ 9 - 177
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ソケット持ち上げ - 10014
一意のソケットがソケットセレクタで持ち上げられるとき(整数 = ソケット ID)、ソケットが持ち上げられないとき(整数 = 0)または複数のソケットが持ち上げられるとき(整数 = 0)に生成されます。
SoftPLCでの名前 :SOCKET_LIFTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ソケット持ち上げ未加工 - 10043
ソケット持ち上げ通知に対する特定のプロトコルで PF4000 と下位互換性をサポートするために追加されます(ソケット持ち上げ 10013 とは逆)。整数は、(フラッシングやいくつ持ち上げられるかに関係なく)すべての持ち上げソケットのビットパターンです。
SoftPLCでの名前 :SOCKET_LIFTED_RAW
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint64 | 1 | 32 |
SocketSelectorTwoDevices | 状態 | uint64 | 1 | 32 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
製造スペース内のツール - 93
SoftPLCでの名前 :TOOL_IN_PRODUCT_SPACE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
作業スペース内のツール - 92
SoftPLCでの名前 :TOOL_IN_WORK_SPACE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ユーザーID - 10050
SoftPLCでの名前 :USER_ID
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
入力信号:サブ信号
関連するサブ信号を調べるために必要な入力信号を選択します:
本セクション内
チャンネルコマンド - 10054:サブ信号
ステップを続行
条件信号が待機タイプとして構成された待機締め付けステップの場合、サブ信号ステップを続行を介して、ツールを個別に制御し、締め付けを続行することができます。
詳細については、次を参照してください:入力信号ステップを続行 - 10128。
SoftPLCでの名前 : CHANNEL_COMMAND_CONTINUE_STEP
値のタイプ | 開始ビット | 長さ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
ブール値 | 3 | 1 | 1 | 1 |
ボルト ID の強制
SoftPLCでの名前 :CHANNEL_COMMAND_FORCE_BOLT_ID
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 8 |
Pset の強制
SoftPLCでの名前 :CHANNEL_COMMAND_FORCE_PSET
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 8 |
結果なしを阻害
SoftPLCでの名前 :CHANNEL_COMMAND_NO_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
NG 結果を阻止
SoftPLCでの名前 :CHANNEL_COMMAND_NOK_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
OK 結果を阻止
SoftPLCでの名前 :CHANNEL_COMMAND_OK_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
出力信号:サブ信号
関連するサブ信号を調べるために必要な出力信号を選択します:
ボルトの締め付け状態 - 79:サブ信号
すべての信号
SoftPLCでの名前 :CYCLE_STATUS_ALL
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 32 |
サイクル実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
選択モードで
SoftPLCでの名前 :CYCLE_STATUS_IN_SELECTED_MODE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
禁止
SoftPLCでの名前 :CYCLE_STATUS_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクル角度高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクル角度低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルハードウェアエラー
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_HW_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル阻止済み
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の締め付けを含まない
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOT_INCLUDED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルOK
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
その他による最終サイクル終了
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TERMINATED_BY_OTHER
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルタイムアウト
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TIMEOUT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルトルク高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルトルク低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めNG
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めOK
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け OK
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
緩め実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_LOOSENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
修理実行中
SoftPLCでの名前 :CYCLE_STATUS_REPAIR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
終了処理実行中
SoftPLCでの名前 :CYCLE_STATUS_TERMINATE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
締め付け実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_TIGHTENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー緑
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_GREEN
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー赤
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_RED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー黄
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_YELLOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
続行の待機中
条件信号が待機タイプとして構成された待機締め付けステップで、サブ信号続行の待機中を介して、個々のボルトは、関連するステータスが入力の続行を待機しているかどうかを示します。
詳細については、次を参照してください:出力信号続行の待機中 - 201。
SoftPLCでの名前 : CYCLE_STATUS_WAITING_FOR_CONTINUE
値のタイプ | 開始ビット | 長さ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
ブール値 | 7 | 1 | 1 | 1 |
チャンネルの締め付け状態 - 80:サブ信号
すべての信号
SoftPLCでの名前 :CYCLE_STATUS_ALL
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 32 |
サイクル実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
選択モードで
SoftPLCでの名前 :CYCLE_STATUS_IN_SELECTED_MODE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
禁止
SoftPLCでの名前 :CYCLE_STATUS_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクル角度高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクル角度低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルハードウェアエラー
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_HW_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル阻止済み
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の締め付けを含まない
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOT_INCLUDED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルOK
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
その他による最終サイクル終了
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TERMINATED_BY_OTHER
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルタイムアウト
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TIMEOUT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルトルク高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルトルク低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めNG
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めOK
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け OK
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
緩め実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_LOOSENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
修理実行中
SoftPLCでの名前 :CYCLE_STATUS_REPAIR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
終了処理実行中
SoftPLCでの名前 :CYCLE_STATUS_TERMINATE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
締め付け実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_TIGHTENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー緑
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_GREEN
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー赤
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_RED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー黄
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_YELLOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
続行の待機中
条件信号が待機タイプとして構成された待機締め付けステップで、サブ信号続行の待機中を介して、個々のチャンネルは、関連するステータスが入力の続行を待機しているかどうかを示します。
詳細については、次を参照してください:出力信号続行の待機中 - 201。
SoftPLCでの名前 :CYCLE_STATUS_WAITING_FOR_CONTINUE
値のタイプ | 開始ビット | 長さ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
ブール値 | 7 | 1 | 1 | 1 |
チャンネルのハードウェア状態 - 81:サブ信号
すべての信号
SoftPLCでの名前 :CYCLE_STATUS_ALL
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 32 |
ドライブが切断されました
SoftPLCでの名前 : CHANNEL_HW_STATUS_DRIVE_DISCONNECTED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ドライブ温度高
SoftPLCでの名前 : CHANNEL_HW_STATUS_DRIVE_TEMP_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ドライブ電圧エラー
SoftPLCでの名前 : CHANNEL_HW_STATUS_DRIVE_VOLTAGE_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
緊急停止有効
SoftPLCでの名前 : CHANNEL_HW_STATUS_EMERGENCY_STOP_ACTIVE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
一般的なハードウェアエラー
SoftPLCでの名前 : CHANNEL_HW_STATUS_GENERAL_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
モーター調節が必要
SoftPLCでの名前 : CHANNEL_HW_STATUS_MOTORTUNE_NEEDED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
作動準備完了
このサブ信号は、ツールまたはドライブに次のエラーが見つからない場合に設定されます:
ツールが接続されていません
ドライブが切断されています
ツール 任意のハードウェア エラー
ドライブ 任意のハードウェア エラー
緊急停止有効
SoftPLCでの名前: CHANNEL_HW_STATUS_READY_TO_OPERATE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツールケーブル無効
SoftPLCでの名前 : CHANNEL_HW_STATUS_TOOL_CABLE_INVALID
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
Tool Disconnected
SoftPLCでの名前 : CHANNEL_HW_STATUS_TOOL_DISCONNECTED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール温度高
SoftPLCでの名前 : CHANNEL_HW_STATUS_TOOL_TEMP_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
トルクトランスデューサエラー
SoftPLCでの名前 : CHANNEL_HW_STATUS_TORQUE_TRANSDUCER_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール ハードウェア エラー
このサブ信号は、正常性パラメータの集まりに対して設定され、次のいずれかを示すことができます:ToolGround、ToolIndicatorBoard、ToolFanVoltage、ToolAccessoryBusVoltage、ToolParameterFile また ToolTriggerS。
SoftPLCでの名前: CHANNEL_HW_STATUS_TOOL_HARDWARE_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール 任意のハードウェア エラー
このサブ信号は、ツールのハードウェアエラーが検出されるたびに設定されます。これは、 ツール温度高、モーター調節必要、ツールケーブル無効、 ツール 切断、 トルクトランスデューサエラー、 ツール ハードウェアエラーのいずれかです。
SoftPLCでの名前: CHANNEL_HW_STATUS_TOOL_ANY_HARDWARE_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ドライブ 任意のハードウェア エラー
このサブ信号は、ドライブのハードウェアエラーが検出されるたびに設定されます。これは、ドライブ温度高、ドライブ電圧エラー、またはドライブ切断済みのいずれかです。
SoftPLCでの名前: CHANNEL_HW_STATUS_DRIVE_ANY_HARDWARE_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
非周期結果項目
このセクションでは、非周期データとして送信できる結果項目の一覧と、データ型の説明用の表を示します。
データ型 | 説明 |
|---|---|
Int8 | 値は 1 バイトの符号付き整数形式となります。浮動小数点数の端数処理は、以下の方法を参照してください: 整数の場合、最下位バイトが保持されます。 |
Int16 | 値は 2 バイトの符号付き整数形式となります。浮動小数点数の端数処理は、以下の方法を参照してください: 整数の場合、最下位バイトが保持されます。 |
Int32 | 値は 4 バイトの符号付き整数形式となります。浮動小数点数の端数処理は、以下の方法を参照してください: 整数の場合、最下位バイトが保持されます。 |
Int64 | 値は 8 バイトの符号付き整数形式となります。浮動小数点数の端数処理は、以下の方法を参照してください: |
Float32 | 値は 4 バイトの符号付き IEEE754 浮動小数点値の形式となります。 |
Fixed32 | 値は 4 バイトの整数形式となります。上位 2 バイトは整数部分、下位 2 バイトは小数部分を 10000 倍にした値となります。 |
文字列 | 値は文字列と形式となります。割り当てられるバイト数は、送信された文字数になります。 |
X を最も近い整数値に丸め、5 の場合は切り上げます。
名称 | 説明 | データ型 |
|---|---|---|
ステータス | 複数回の締め付けまたは緩めのステータス (OK または NG): | Int32 (符号なし) |
総ステータス追加情報 | 結果に関する情報が追加されました。OK 結果と NG 結果の両方に有効です。全体的なステータス追加情報 を参照してください。 | Int32 (符号なし) |
同期モード名 | 締め付けに使用する同期モードの名前 | 文字列 (1 ~ 80 文字) |
同期モードインデックス | 締め付けに使用する同期モードのインデックス | Int32 (符号なし) |
名称 | 説明 | データ型 |
|---|---|---|
仮想ステーション名 | 仮想ステーションの名前 | 文字列 (1 ~ 80 文字) |
日時 | 締め付け結果のタイムスタンプ UNIX 形式のタイムスタンプ、1970 年以降の秒数 | Int32 (符号なし) |
車両識別番号(VIN) | 締め付け結果の VIN 番号 | 文字列 (1 ~ 80 文字) |
名称 | 説明 | データ型 |
|---|---|---|
バッチシーケンス カウンタ | Int32 (符号なし) | |
バッチシーケンスの現ステータス | バッチシーケンスのステータス: | Int32 (符号なし) |
バッチサイズ | Int32 (符号なし) | |
バッチの現ステータス | バッチのステータス: | Int32 (符号なし) |
バッチカウント数 | Int32 (符号なし) | |
バッチシーケンス名 | バッチシーケンスの名前 | 文字列 (1 ~ 80 文字) |
バッチシーケンスのインデックス | Int32 (符号なし) |
名称 | 説明 | データ型 |
|---|---|---|
締め付けプログラム名 | 締め付けまたは緩めに使用するプログラムの名前。 | 文字列 (1 ~ 80 文字) |
操作モード | 結果が締め付け操作なのか緩め操作なのかを示します。 | Int32 (符号なし) |
ステータス | 締め付けまたは緩めのステータス (OK または NG): | Int32 (符号なし) |
ステータス情報 | 結果に関する情報が追加されました。OK 結果と NG 結果の両方に有効です。全体的なステータス追加情報 を参照してください。 | Int32 (符号なし) |
停止エラー | 締め付けによる主なエラー。可能な値については、停止エラーコードを参照してください。 | Int32 (符号なし) |
ボルト番号 | 締め付けられたボルトの番号 | Int32 (符号なし) |
ボルト名 | 締め付けたボルトの名前 | 文字列 (1 ~ 80 文字) |
チャネル | 締め付けを行った締め付けチャネル (工具) の番号 | Int32 (符号なし) |
失敗ステップ | NG の場合、締め付けは NG の原因となったステップを示します | Int32 (符号なし) |
最終トルク | 測定された最終トルク、単位 [Nm] | Int16 (符号付き) |
トルク低制限 | 締め付けプログラムで構成された最終トルクの下限値、単位 [Nm] | Int16 (符号付き) |
トルク高制限 | 締め付けプログラムで構成された最終トルクの上限、単位 [Nm] | Int16 (符号付き) |
最終角度 | 測定された最終角度、単位 [度] | Int16 (符号付き) |
角度低制限 | 締め付けプログラムで設定された最終角度の下限 (単位 [度]) | Int16 (符号付き) |
角度高制限 | 締め付けプログラムで構成された最終角度の上限、単位 [度] | Int16 (符号付き) |
経過時間 | 締め付けに必要な合計時間、単位 [s] | Int16 (符号付き) |
目標角度 | 角度制御プロセスの締め付け目標角度、単位 [度] | Int16 (符号付き) |
目標トルク | トルク制御プロセスの締め付け目標トルク、単位 [Nm] | Int16 (符号付き) |
最終角度トルクトリガー | 最終角度測定のトルクトリガー、単位 [Nm] | Int16 (符号付き) |
ツール品番 | 締め付けに使用した工具の品目 (品番) | 文字列 (1 ~ 80 文字) |
ツールのシリアル番号 | 締め付けに使用した工具のシリアル番号 | 文字列 (1 ~ 80 文字) |
コンパクトエラー | 「コンパクト」形式で表示される締め付けエラー。次の定義でビットコード化されています: | Int8 (符号なし) |
名称 | 説明 | データ型 |
|---|---|---|
角度 | プログラムモニターで計測した角度、単位 [度] | Int16 (符号付き) |
角度トルクトリガー | プログラムモニター角度のトルクトリガー、単位 [Nm] | Int16 (符号付き) |
トルク | プログラムモニターで計測したトルク、単位 [Nm] | Int16 (符号付き) |
名称 | 説明 | データ型 |
|---|---|---|
トルク差 | T1 と T2 の間で測定された最大トルク差、複数トルク トランスデューサーを備えたツールの場合、単位 [Nm] | Int16 (符号付き) |
角度差 | A1 と A2 の間で測定された最大角度差、複数角度トランスデューサーを備えたツールの場合、単位 [度] | Int16 (符号付き) |
最大時間限度 | 締め付けプログラムで構成された締め付けの最大許容時間、単位 [s] | Int16 (符号付き) |
名称 | 説明 | データ型 |
|---|---|---|
ピークトルク | ステップモニターで測定された値 PT – ピークトルク、単位 [Nm]。 | Int16 (符号付き) |
シャットオフトルク | ステップモニターで測定された値 SOT – シャットオフトルク、単位 [Nm]。 | Int16 (符号付き) |
平均トルク | ステップモニターで測定された値 MT – 平均トルク、単位 [Nm]。 | Int16 (符号付き) |
角度 | ステップモニターで測定された値 A – 角度、単位 [度]。 | Int16 (符号付き) |
角度トルクトリガー | ステップモニターでのトルクトリガー測定値 A – 角度、単位 [Nm]。 | Int16 (符号付き) |
トルクレート | ステップモニターで測定されたトルクレート TRD – トルクレートと偏差、単位 [Nm/度]。 | Int16 (符号付き) |
トルクレート偏差 | ステップモニターで測定されたトルクレート偏差 TRD – トルクレートと偏差、単位 [Nm]。 | Int16 (符号付き) |
ポストスレッドカット角度実測値 | ステップモニターで測定された値 PTCA – ポストスレッドカット角度、単位 [度]。 | Int16 (符号付き) |
ポストスレッドカットピークトルク実測値 | ステップモニターで測定された値 PTCPT – ポストスレッドカットピークトルク、単位 [Nm]。 | Int16 (符号付き) |
角度枠内のピークトルク | ステップモニターで測定された値 PT – ピークトルク、単位 [Nm]。 | Int16 (符号付き) |
角度枠内の低トルク | ステップモニターで測定された値 TAW – 角度ウィンドウのトルク、単位 [Nm]。 | Int16 (符号付き) |
ポストビュートルク高 | ステップモニターで測定された値 PVTH - ポストビュートルク高、単位 [Nm]。 | Int16 (符号付き) |
ポストビュートルクの角度高 | ステップモニターで測定された値 PVTH - ポストビュートルク高、単位 [度]。 | Int16 (符号付き) |
ポストビュートルク低 | ステップモニターで測定された値 PVTL – ポストビュートルク低、単位 [Nm]。 | Int16 (符号付き) |
ポストビュートルクの角度低 | ステップモニターで測定された値 PVTL – ポストビュートルク低、単位 [度]。 | Int16 (符号付き) |
降伏角度 | ステップモニターで測定された値 YA – 降伏点からの角度、単位 [度]。 | Int16 (符号付き) |
トルク勾配 | ステップモニターで測定された値 TG - トルク勾配、単位 [Nm/度]。 | Int16 (符号付き) |
スティックスリップ検出 - 測定された振動数 | ステップモニターで測定された値 SSD - スティックスリップ検出、単位 [振動数] | Int16 (符号付き) |
シャットオフ電流 | ステップモニターで測定された値 SOC - シャットオフ電流、単位 [A]。 | Int16 (符号付き) |
プリべリングトルク | ステップモニターで測定された値 PrT - プリベリングトルク、単位 [Nm]。 | Int16 (符号付き) |
監視時間 | ステップモニターで測定された値 Ti – 時間、単位 [s]。 | Int16 (符号付き) |
電流をモニタする | ステップモニターで測定された値 C - 電流、単位 [A]。 | Int16 (符号付き) |
ピークトルク-下限 | ステップモニターで構成された制限 PT – ピークトルク、単位 [Nm]。 | Int16 (符号付き) |
ピークトルク-上限 | ステップモニターで構成された制限 PT – ピークトルク、単位 [Nm]。 | Int16 (符号付き) |
シャットオフトルク - 下限 | ステップモニターで構成された制限 SOT – シャットオフトルク、単位 [Nm]。 | Int16 (符号付き) |
シャットオフトルク - 上限 | ステップモニターで構成された制限 SOT – シャットオフトルク、単位 [Nm]。 | Int16 (符号付き) |
平均トルク-下限 | ステップモニターで構成された制限 MT – 平均トルク、単位 [Nm]。 | Int16 (符号付き) |
平均トルク-上限 | ステップモニターで構成された制限 MT – 平均トルク、単位 [Nm]。 | Int16 (符号付き) |
トルクレートと偏差 - トルクレート下限 | ステップモニターで構成された制限 TRD – トルクレートと偏差、単位 [Nm/度]。 | Int16 (符号付き) |
トルクレートと偏差 - トルクレート上限 | ステップモニターで構成された制限 TRD – トルクレートと偏差、単位 [Nm/度]。 | Int16 (符号付き) |
トルクレートと偏差 - 偏差制限 | ステップモニターで構成された制限 TRD – トルクレートと偏差、単位 [Nm]。 | Int16 (符号付き) |
角度ウィンドウのトルク - 下限 | ステップモニターで構成された制限 TAW – 角度ウィンドウのトルク、単位 [Nm]。 | Int16 (符号付き) |
角度ウィンドウのトルク - 上限 | ステップモニターで構成された制限 TAW – 角度ウィンドウのトルク、単位 [Nm]。 | Int16 (符号付き) |
ポストビュートルク高 - 上限 | ステップモニターで構成された制限 PVTH - ポストビュートルク高、単位 [Nm]。 | Int16 (符号付き) |
ポストビュートルク低 - 下限 | ステップモニターで構成された制限 PVTL – ポストビュートルク低、単位 [Nm]。 | Int16 (符号付き) |
降伏点からの角度 - 上限 | ステップモニターで構成された制限 YA – 降伏点からの角度、単位 [度]。 | Int16 (符号付き) |
降伏点からの角度 - 下限 | ステップモニターで構成された制限 YA – 降伏点からの角度、単位 [度]。 | Int16 (符号付き) |
トルク勾配 - 上限 | ステップモニターで構成された制限 TG - トルク勾配、単位 [Nm/度]。 | Int16 (符号付き) |
トルク勾配 - 下限 | ステップモニターで構成された制限 TG - トルク勾配、単位 [Nm/度]。 | Int16 (符号付き) |
シャットオフ電流 - 下限 | ステップモニターで構成された制限 SOC - シャットオフ電流、単位 [A]。 | Int16 (符号付き) |
シャットオフ電流 - 上限 | ステップモニターで構成された制限 SOC - シャットオフ電流、単位 [A]。 | Int16 (符号付き) |
プリべリングトルク - 上限 | ステップモニターで構成された制限 PrT - プリベリングトルク、単位 [Nm]。 | Int16 (符号付き) |
プリべリングトルク - 下限 | ステップモニターで構成された制限 PrT - プリベリングトルク、単位 [Nm]。 | Int16 (符号付き) |
時間 - 下限 | ステップモニターで構成された制限 Ti – 時間、単位 [s]。 | Int16 (符号付き) |
時間 - 上限 | ステップモニターで構成された制限 Ti – 時間、単位 [s]。 | Int16 (符号付き) |
モニター電流 - 下限値 | ステップモニターで構成された制限 C - 電流、単位 [A]。 | Int16 (符号付き) |
モニター電流 - 上限値 | ステップモニターで構成された制限 C - 電流、単位 [s]。 | Int16 (符号付き) |
角度 - 上限 | ステップモニターで構成された制限 A – 角度、単位 [度]。 | Int16 (符号付き) |
角度 - 下限 | ステップモニターで構成された制限 A – 角度、単位 [度]。 | Int16 (符号付き) |
降伏点トルク | ステップモニターで測定された値 YA – 降伏点からの角度、単位 [Nm]。 | Int16 (符号付き) |
降伏点勾配 | ステップモニターで測定された値 YA – 降伏点からの角度、単位 [Nm/度]。 | Int16 (符号付き) |
ピーク勾配 | ステップモニターで測定された値 YA – 降伏点からの角度、単位 [Nm/度]。 | Int16 (符号付き) |
名称 | 説明 | データ型 |
|---|---|---|
クロススレッド | ステップ制限で測定された値 CTh – 食違いネジ、単位 [度]。 | Int16 (符号付き) |
経過時間 | ステップ制限で測定された値 Ti – 時間、単位 [s]。 | Int16 (符号付き) |
制限電流 | ステップ制限で測定された値 C - 電流、単位 [A]。 | Int16 (符号付き) |
最大時間 - 上限 | ステップ制限で構成された制限 Ti – 時間、単位 [s]。 | Int16 (符号付き) |
制限電流 - 上限 | ステップ制限で構成された制限 C - 電流、単位 [A]。 | Int16 (符号付き) |
制限電流 - 下限 | ステップ制限で構成された制限 C - 電流、単位 [A]。 | Int16 (符号付き) |
クロススレッド (食い違い) - 下限 | ステップ制限で構成された制限 CTh – 食違いネジ、単位 [度]。 | Int16 (符号付き) |
クロススレッド (食い違い) -上限 | ステップ制限で構成された制限 CTh – 食違いネジ、単位 [度]。 | Int16 (符号付き) |
停止エラーコード
エラーコード | |
|---|---|
0 | 未設定 |
1 | ブレーキ故障 |
2 | トリガー喪失 |
3 | シャント校正 シャントに失敗しました |
4 | シャント校正 ゼロオフセットに失敗しました |
5 | 過負荷 |
6 | サイクルが中断されました |
10011 | ステップ位置決め 位置が設定されていません |
10012 | 係合に失敗しました |
10013 | ステップメカトロニックレンチ 角速度高 |
10014 | ステップメカトロニックレンチ 緩め制限に達しました |
10015 | ステップメカトロニックレンチ リヒット |
10021 | ステップレンチ生産 過速度 |
10022 | ステップレンチ生産 残留トルクなし |
10023 | ステップレンチ生産 スナッグモニタリング高 |
10024 | ステップレンチ生産 リヒット |
10025 | ステップレンチ生産 締め付けタイムアウト |
10031 | ステップレンチ品質 過速度 |
10032 | ステップレンチ品質 残留トルクなし |
10033 | ステップレンチ品質 スナッグモニタリング高 |
10034 | ステップレンチ品質 リヒット |
10035 | ステップレンチ品質 締め付けタイムアウト |
10041 | ステップTensorPulse パルスドライブソケットが検出されません |
10051 | ステップ残留トルクピークレンチ 残留トルクが検出されません |
10052 | ステップ残留トルク アングルレンチ 残留点が検出されませんでした |
20011 | ステップモニター ピーク角度 角度が測定されていません |
20012 | ステップモニター ピーク角度 低角度 |
20013 | ステップモニター ピーク角度 高角度 |
20021 | ステップモニター ピークトルク トルクが測定されていません |
20022 | ステップモニター ピークトルク 低トルク |
20023 | ステップモニター ピークトルク 高トルク |
20031 | ステップモニター 平均トルク トルクが測定されていません |
20032 | ステップモニター 平均トルク 低トルク |
20033 | ステップモニター 平均トルク 高トルク |
20041 | ステップモニター シャットオフトルク トルクが測定されていません |
20042 | ステップモニター シャットオフトルク 低トルク |
20043 | ステップモニター シャットオフトルク トルク高 |
20051 | ステップモニター トルクレート トルクレートが測定されていません |
20052 | ステップモニター トルクレート 低トルクレート |
20053 | ステップモニター トルクレート 高トルクレート |
20054 | ステップモニター トルクレート トルクレート偏差が大きすぎます |
20055 | ステップモニター トルクレート トルクレート偏差が測定されていません |
20061 | ステップモニター 角度 角度が測定されていません |
20062 | ステップモニター 角度 低角度 |
20063 | ステップモニター 角度 高角度 |
20071 | ステップモニター ポストスレッドカット角度 角度が測定されていません |
20072 | ステップモニター ポストスレッドカット角度 低角度 |
20073 | ステップモニター ポストスレッドカット角度 高角度 |
20081 | ステップモニター ポストスレッドカットピークトルク トルクが測定されていません |
20082 | ステップモニター ポストスレッドカットピークトルク 低トルク |
20083 | ステップモニター ポストスレッドカットピークトルク 高トルク |
20091 | ステップモニター 角度ウィンドウのトルク トルクが測定されていません |
20092 | ステップモニター 角度ウィンドウのトルク 低トルク |
20093 | ステップモニター アングルウィンドウのトルク トルク高 |
20101 | ステップモニター ポストビュー平均トルク高 トルクが測定されていません |
20102 | ステップモニター ポストビュー平均トルク高 高トルク |
20111 | ステップモニター ポストビュー平均トルク低 トルクが測定されていません |
20112 | ステップモニター ポストビュー平均トルク低 低トルク |
20121 | ステップモニター 降伏角度 角度が測定されていません |
20122 | ステップモニター 降伏角度 低角度 |
20123 | ステップモニター 降伏角度 高角度 |
20131 | ステップモニター スティックスリップ検出 低下が測定されていません |
20132 | ステップモニター スティックスリップ検出 低下がトリガー未満 |
20141 | ステップモニター シャットオフ電流 電流が測定されていません |
20142 | ステップモニター シャットオフ電流 電流低 |
20143 | ステップモニター シャットオフ電流 電流高 |
20151 | ステップモニター プリベリングトルク トルクが測定されていません |
20152 | ステップモニター プリベリングトルク 低トルク |
20153 | ステップモニター プリベリングトルク 高トルク |
20161 | ステップモニター パルスカウント カウントが測定されていません |
20162 | ステップモニター パルスカウント カウント低 |
20163 | ステップモニター パルスカウント カウント高 |
20171 | ステップモニター 時間 時間が測定されていません |
20172 | ステップモニター 時間 時間低 |
20173 | ステップモニター 時間 時間高 |
20181 | ステップモニター トルク校正 トルクが測定されていません |
20182 | ステップモニター トルク校正 低トルク |
20183 | ステップモニター トルク校正 高トルク |
20191 | ステップモニター クリック クリック角度が測定されていません |
20192 | ステップモニター クリック クリックトルクが測定されていません |
20201 | ステップモニター トルク勾配 勾配が測定されていません |
20202 | ステップモニター トルク勾配 勾配低 |
20203 | ステップモニター トルク勾配 勾配高 |
20211 | ステップモニター 緩め検出 有効緩め |
20221 | ステップモニター トルク トルクが測定されていません |
20222 | ステップモニター トルク 低トルク |
20223 | ステップモニター トルク 高トルク |
20231 | ステップモニター モーター電流 電流が測定されていません |
20232 | ステップモニター モーター電流 電流低 |
20233 | ステップモニター モーター電流 電流高 |
30011 | ステップ制限 高トルク トルクが測定されていません |
30012 | ステップ制限 高トルク 低トルク |
30013 | ステップ制限 高トルク 高トルク |
30021 | ステップ制限 高角度 角度が測定されていません |
30022 | ステップ制限 高角度 低角度 |
30023 | ステップ制限 高角度 高角度 |
30031 | ステップ制限 高時間 時間が測定されていません |
30032 | ステップ制限 高時間 時間低 |
30033 | ステップ制限 高時間 時間高 |
30041 | ステップ制限 クロススレッド 角度が測定されていません |
30042 | ステップ制限 クロススレッド 低角度 |
30043 | ステップ制限 クロススレッド 高角度 |
30051 | ステップ制限 トルク勾配 勾配が測定されていません |
30052 | ステップ制限 トルク勾配 勾配低 |
30053 | ステップ制限 トルク勾配 勾配高 |
30061 | ステップ制限 低トルク トルクが測定されていません |
30062 | ステップ制限 低トルク 低トルク |
30071 | ステップ制限 過剰な角度回転 プラスに達しました |
30072 | ステップ制限 過剰な角度回転 マイナスに達しました |
30081 | ステップ制限 電流偏差 電流値 |
30091 | ステップ制限 パルスカウント高 カウント高 |
30100 | ステップ制限 角度ウィンドウのトルク トルクが測定されていません |
30101 | ステップ制限 角度ウィンドウのトルク 高トルク |
30102 | ステップ制限 角度ウィンドウのトルク 低トルク |
30110 | ステップ制限 リヒット 制限に達しました |
30120 | ステップ制限 速度高 速度が測定されていません |
30121 | ステップ制限 速度高 速度高 |
30122 | ステップ制限 速度高 速度低 |
30123 | ステップ制限 モーター電流 電流高 |
30124 | ステップ制限 モーター電流 電流低 |
30125 | ステップ制限 モーター電流 電流が測定されていません |
40011 | プログラム制限 高トルク トルクが測定されていません |
40012 | プログラム制限 高トルク 低トルク |
40013 | プログラム制限 高トルク 高トルク |
40021 | プログラム制限 高時間 時間が測定されていません |
40022 | プログラム制限 高時間 時間低 |
40023 | プログラム制限 高時間 時間高 |
40031 | プログラム制限 デュアルトルクトランスデューサー トランスデューサーエラー |
40032 | プログラム制限 デュアル角度トランスデューサー トランスデューサーエラー |
40042 | プログラム制限 角度 高角度 |
40051 | プログラム制限 時間 時間高 |
50011 | プログラムモニター 角度 角度が測定されていません |
50012 | プログラムモニター 角度 高角度 |
50013 | プログラムモニター 角度 低角度 |
50021 | プログラムモニター トルク トルクが測定されていません |
50022 | プログラムモニター トルク 高トルク |
50023 | プログラムモニター トルク 低トルク |
50031 | プログラムモニター 時間 時間が測定されていません |
50032 | プログラムモニター 時間 時間高 |
50033 | プログラムモニター 時間 時間低 |
全体的なステータス追加情報
各ボルトのマルチレベルと全体レベルには、全体ステータス追加情報と呼ばれるフィールドがあります。このフィールドに使用できるパラメーターは、次のとおりです:
パラメーター | コメント | 追加情報 |
|---|---|---|
ステータスなし | 締付け結果にはステータスが設定されていません | ステータスなし = 0 |
修復済み | 締め付けの全体的なステータスはOKですが、締め付け中に少なくとも、1つの修復されたエラーが発生しました。 | 修理済み = 1 |
不良品管理によって終了 | ボルトにはそれ自体のエラーはありませんでしたが、別のボルトのエラーのため、終了するように指示されました。 | 不良品管理による終了 = 2 |
不良品管理の終了に失敗しました | ボルトの中止が指示され、中止パスの実行中にエラーが発生しました。 | 不良品管理終了失敗 = 3 |
停止しました | たとえばフィールドバスを介して送信された機械停止、またはツールトリガが解除された場合などの外部からの停止信号によって、締め付けが終了しました。 | 停止 {4} |
緊急停止しました | 締め付けは緊急停止により終了しました。 | 非常停止 = 5 |
ツールエラー | ツールのハードウェアエラーにより締め付けは終了しました。 | ツールエラー = 6 |
ドライブエラー | ドライブのハードウェアエラーのため締め付けが終了しました。 | ドライブエラー = 7 |
禁止 | 外部信号によってブロックされているため、デバイスは実行できませんでした。 | 禁止 = 8 |
無効なPset | コントローラが無効な締め付けプログラムをロードしました。 | 無効な Pset = 9 |
始動前確認に失敗しました | コントローラの 始動前確認ステータスが失敗しました。ツールエラー、緊急停止がアクティブである、システムが停止信号を受信した、など、さまざまな理由が考えられます。 | 始動前チェック失敗 = 10 |
不良品管理の修復に失敗しました | ボルトの修復が命じられ、修復パスの実行中にエラーが発生しました。 | 不良品管理修理失敗 = 11 |
印刷シナリオ
ステーションでの印刷
印刷するプログラムがコントローラ上に存在し、TT2スタンドアロンバージョンがインストールされたアトラスコプコPCのいずれかにアクセスできる場合に使用します。Flexコントローラに接続してステーションでプログラムを印刷する:
締め付けプログラムを選択して開き、表示します。
プログラムを印刷するには、ソフトウェアの右上にある [印刷] ボタンを使用します。(Windows 10マシンの場合、TT2で印刷オプションを使用すると、デフォルトで「Microsoft print to pdf」というオプションが使用可能になります。以前のバージョンでは、このオプションは、Adobe acrobat をインストールするか、古い Windows マシン上で Foxit PDF リーダーをインストールするいずれかで追加することができます)。
アクティブ(オンライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷
印刷するプログラムが、アクセスできないコントローラからエクスポートされたxxx.tar.gzファイルに入っている場合は、これを使用してください。システムからエクスポートされた tar.gz ファイルを使用してプログラムを印刷する:
任意のPF6 Flexコントローラに接続します。
コントローラから現在の設定(元の設定)をエクスポートします。これは、最後に復元できるようにするために、既存のシステムをバックアップするために行われます。
印刷する締め付けプログラムを含む構成ファイルをこのコントローラーにインポートします。
ステーションでの印刷の手順に記載されているように締め付けプログラムを開いて印刷します。
手順2で保存した元の設定をインポートして、コントローラを元の状態に戻します。
非アクティブ(オフライン)PF6 FlexSystemを使用したPF6 FlexSystemでの印刷
これは、システムの前にいなくてもファイル(xxx.jsonファイル)を印刷できる最も簡単な方法を提供します。
.json ファイルは、オフラインコントローラ (ライブラリ) から構成をエクスポートした結果として作成されます。
.json ファイルをライブラリにインポートします。
ライブラリの.jsonファイルから構成を開きます。
締め付けプログラムを開いて印刷します。
tar.gz と .json の間の変換
設定は、接続されたコントローラとオフラインコントローラの間で移動できます。XXX.tar.gz から XXX.json へ、またはその逆に移動できます。
前提条件:
Flex コントローラ
TT2のインストール
.tar.gz ファイルを .json ファイルに変換するには:
アクティブ(オンライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷 での印刷のステップ1-3 に従ってください。
左の列にあるコントローラ名を右クリックし、「ライブラリに追加」を選択します。
ライブラリに移動し、オフラインコントローラとしてライブラリに追加されたコントローラ名を見つけます。
[コントローラ] チェックボックス-[管理]-[.json ファイルのエクスポート] を選択します。
.jsonファイルを.tar.gzファイルに変換するには:
非アクティブ(オフライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷 での印刷のステップ1-2 に従ってください。
[コントローラ] チェックボックス-[管理]-[配信] を選択します。これにより、接続されているコントローラに配布するチェックボックス項目のリストがポップアップ表示されます。関連するものを確認し、配信を選択します。
プラント構造 - コントローラを開き、エクスポートしてxxx.tar.gzファイルを取得します。
RabbitMQの概要
ToolsTalk 2 からToolsTalk 2 (バージョン2.17から) へのメッセージを公開するには、RabbitMQ のインストールが必要です。
RabbitMQ をインストールしたら、ToolsTalk 2 サービスを開始する前に前提条件が満たされていることを確認してください。 を参照してください。
RabbitMQ のインストールの概要については、https://www.rabbitmq.com/install-windows.html をご覧ください。
ステップ | タスク | 確認 |
|---|---|---|
1 | Erlang runtimeのインストール
| ░░ |
2 | RabbitMQのインストール
| ░░ |
3 | RabbitMQ Web管理プラグインを有効にして、Webブラウザーを介してRabbitMQを管理する
| ░░ |
RabbitMQ を構成する前に、Atlas Copco Data Communication が正しく構成されていることを確認してください。
ステップ | タスク | 確認 |
|---|---|---|
4 | RabbitMQの構成
| ░░ |
ToolsTalk 2をインストールする必要がある場合、を御覧ください。
もしToolsTalk 2がすでにインストールされている場合は、DataCommunication Installation Configuratorを再度実行して、設定を完了します。とを参照してください。
ステップ | タスク | 確認 |
|---|---|---|
5 | ToolsTalk 2がインストールされた後、ToolsTalk 2ログファイルに次のエントリが表示されます: [2021-06-11 12:16:03.368 INF RabbitMqBroadcastClient.CreateConnectionAndExchange ] - Created RabbitMQ broadcast exchange: AtlasCopco_ACDC_ToolsTalk_Exchange 。 ログファイルは C:\ProgramData\Atlas Copco\Logs\DataCommunicationService にあります。 | ░░ |
サードパーティーライセンスのリスト
ToolsTalk 2 サーバーおよびクライアントと共にインストールされる JSON ファイルには、ToolsTalk 2 ソフトウェアで使用されるサードパーティコンポーネントが一覧表示されます。ファイルは、ソフトウェアの種類と展開テクノロジーに応じて保存場所が異なります。
ToolsTalk2 クライアント
C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\_manifest\spdx_2.2\manifest.spdx.json
ToolsTalk2 サーバー ClickOnce
C:\Program Files\Atlas Copco\ToolsTalk ClickOnce\Server\_manifest\spdx_2.2\manifest.spdx.json
ToolsTalk2 サーバー
C:\Program Files\Atlas Copco\ToolsTalk Server\_manifest\spdx_2.2\manifest.spdx.json
ToolsTalk2 ステーションのセットアップ
C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\_manifest\spdx_2.2\manifest.spdx.json
セキュリティスキャンの偽陽性
サイバーセキュリティにおける偽陽性とは誤って脅威であると分類されたテスト結果のことです。
セキュリティ ソフトウェア Black Duck SCA は、ToolsTalk 2 の WinSCP に関連する脆弱性を誤って報告しています。ToolsTalk 2 は、WinSCP .NET アセンブリ (MPL ライセンス) を使用して、WinSCP 実行可能ファイル (GPL ライセンス) と対話します。ToolsTalk 2は、ライブラリとしてではなく、公開スクリプトインターフェイスを介して WinSCP 実行ファイルにアクセスするため、ToolsTalk 2 自体が GPL に基づくライセンスを取得する必要はありません。