ToolsTalk MT (9.4.0)
Software
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
責任
動作環境における多くの事象が締め付けプロセスに影響を与える可能性があり、結果の検証が必要となります。適用規格および/または規制に準拠して、当社は、ここで、締め付け結果に影響を与える可能性のある事象があった場合に、導入したトルクおよび回転方向を確認いただくよう要請します。このような事象の例として、以下のものがありますが、これらに限定されるものではありません。
ツーリングシステムの初めての設置
部品バッチ、ボルト、ネジバッチ、ツール、ソフトウェア、構成または環境の変更
空気接続または電気接続の変更
ライン人間工学、プロセス、品質手順または慣行の変更
オペレーターの変更
締め付けプロセスの結果に影響を与えるその他の変更
以下について確認する必要があります。
影響のある事象によりジョイントの条件が変更されていないこと。
初めての機器の設置、メンテナンスまたは修理後に完了していること。
少なくともシフト毎に一回、または他の適切な頻度に行うこと。
コンフィギュレーション概要
ToolsTalk MTの概要
MicroTorque システムは、低トルクアプリケーション用アトラスコプコスクリュのドライブ範囲です。
ToolsTalk MT は、MicroTorque コントローラの簡単で使いやすいプログラミングと、リアルタイムの監視を提供する PC ソフトウェアパッケージであり、以下を含みます。
-
トルク制御および角度制御によるマルチステップネジ締付手順。
-
フレキシブルで設定可能なネジ固定ステップシーケンス。
-
高精度な締付トルク、角度制御、マルチステッププロセスデータの文書化。
-
パラメータ設定、グラフィカルな読み出しおよびプロセスデータ通信のための USB を介したマルチポイント通信。
ToolsTalk MT のパスワード保護
Tools Talk MT のパスワード保護を有効または無効にするには、PC の管理者権限が必要です。認証を有効にすると、パスワードを変更するのに管理者権限は必要ありません。
パスワード保護を有効にした状態で ToolsTalk MT を開始すると、読み取り専用モードになります。
[スタート] メニューで [ToolsTalk MT] を見つけて右クリックし、[管理者として実行] を選択します。
[ユーザーアカウントの管理] ウィンドウで [はい] を選択します。
[ToolsTalk MT] で、[ユーザー] アイコン
 を選択します。
を選択します。[ユーザー設定] で [ToolsTalk MT をパスワードで保護する] を選択し、[パスワードの設定] を選択します。

[認証設定] で、パスワード (最低 4 文字) を入力し、[OK] を選択します。
[ユーザー設定] で [OK] を選択します。現在、編集モードでログインしています。
[編集] に移動し、[サインアウト] を選択して読み取り専用モードに戻ります。
Pset
ToolsTalk MTの締付プログラムは、Psetと呼ばれます。Psetは複数のステップで構成することができます。すべてのステップは、高精度な速度制御と、角度監視とトルク監視のオプションを数多く備えています。
検証プログラム
検証プログラムは、トルクチェックを行うときにツールを検証するために使用される、独特のタイプの締め付けプログラムです。
バッチシーケンス
バッチシーケンスは、締付ワークフローにおけるグルーピング制御と追加制御の方法です。バッチシーケンスは、コントローラにより逐次実行されるバッチ、イベントまたは情報ステップのリストであることも可能です。バッチシーケンスは、スクリーン説明書に関して、またPLCまたはスキャナなど、外部設備機器を使用して、オペレータと対話することができます。
バッチ
1つのバッチは、所定のPsetの実行回数として定義されます。
イベント
イベントは、環境コントロールの方法、出力設定、入力待ち、入力レベルの監視、遅延の設定、またはスキャナからのデータの取得です。
情報
情報ステップはオペレータに情報を伝え、ガイドするのに使用することができます。
作業選択(ソースの選択)
システムで作業(Psetとバッチシーケンス)を選択するには、4つの異なる仕方があります。
プロトコル(Tools Talk MT + Atlas Copco Open Protocol)
デジタル I/O
スキャナ(バーコード/ICタグ)
コントローラ
フィールドバス
結果の取扱い
各締付けと測定のあと、結果のデータが生成され、コントローラメモリに保管されます。最大100.000の結果と1000のグラフを締め付けコントローラーに保存でき、最大10000の結果とグラフを測定コントローラーに保存できます。
結果が最大数に達した場合、最新の結果が一番古い結果を上書きします。
追跡可能性の向上と持続的な改善のために、スキャナでシリアル番号と生産データを取得し、結果とともに保管することが可能です。
結果は、コントローラから、通信ネットワーク(イーサネットまたはUSB)を経由して、またはUSBフラッシュメモリを使用する手作業の抽出により、エクスポートできます。
追跡可能性の向上と生産監視のために、MTF 6000はToolsNet 8に接続できます。
ユーザインターフェイス
以下の図は、コントローラに接続したときのメインウィンドウを示しています。アイコンは接続されているIAMによって異なります。

A | 接続の管理 |
B | Pset および検証プログラム |
C | バッチシーケンス |
D | 識別子とステーションバーコードの生成 |
E | 構成 |
F | 分析 |
G | ステップの結果/結果/イベント |
H | ツールの設定 |
I | コントローラの設定 |
J | デジタルI/Oとパスワードの設定 |
K | フィールドバス |
L | トランスデューサー設定 |
M | すべてを変更の取り消します |
N | 変更をコントローラに保存します。オフラインモードでは、変更はファイルに保存されます。 |
O | 開いているウィンドウの表示法を選択します。タイル、カスケードまたはただ1つのウィンドウ。 |
P | ユーザ設定。 |
Q | ヘルプ |
R | ToolsTalk MTソフトウェアのバージョン |
S | TN は、コントローラーが ToolsNet 8に接続されると表示されます。 |
T | 新しいToolsTalk MTがダウンロードできる場合の警告/情報 |
U | ヒントに関するメッセージ |
V | アクティブイベントの種類 |
W | アクティブイベントの文字表示 |
はじめに
コントローラを開始します。
PSUをコントローラーに接続し、電源がオンになっていることを確認します。QA または締め付けステーションを使用している場合は、バッテリーのボタンを押してユニットを起動させます。
ToolsTalk MTの始動
PC デスクトップのアイコンまたはプログラムメニューのショートカットから ToolsTalk MTを起動します。
接続メニューの管理

コントローラーの接続方法は複数あります。
USB
シリアル (MTF 400およびG4のみ利用可能)
イーサネット (MTF 6000およびMT4のみ利用可能)
イーサネット経由で接続されたコントローラはお気に入りとして保存できます。
オフライン
オフラインモードでは、ToolsTalk MTはバーチャルデバイスに接続されます。すべての機能は、実際のコントローラに接続しているときと同じ機能を備えています。
オフラインファイルを、USBフラッシュメモリを介してコントローラから、またはTools Talk MTからエクスポートおよびインポートすることが可能です。
Save (保存)ボタンをクリックして、オフラインモードでの作業中に行ったすべての変更を保存します。
QAコントローラーに仮想的に接続することはできません。締め付けのみです。
ネットワークアップデート
ネットワークアップデートを使用すると、ネットワーク上の複数のコントローラーのファームウェアと構成 (Pset、バッチシーケンス、識別子) を一度に更新できるようになります。ネットワークに接続されている限り、各コントローラーを 1 つずつ更新する必要がなくなります。この機能は IAM スマートオートメーションでのみサポートされています。
ネットワークアップデートを使用すると、新しい構成によって既存のすべての Pset、バッチシーケンス、および識別子が削除され、上書きされます。
設定
Pset および検証プログラム

ToolsTalk MTの締付プログラムは、Psetと呼ばれます。
Psetは、それが作成されたとき、コントローラに接続されているツールに設定されています。Psetがアクティブなときに、別のツールが接続されている場合、Psetが動作していないことを示すプロンプトが表示されます。
Psetリストの概要
各行が1つのPsetを表します。列は次の情報を含んでいます。
Psetを選択するためのチェックボックス
番号
名称、ユーザが定義する名前
ステップ番号
最終変更
ツールモデル、Psetとともに動作する工具モデル。
調整
アクティブ
各列の見出しをクリックして、リストを並べ替えることができます。
Pset/検証プログラムの追加
Psetを追加するには、以下のステップを実行します。
メニューバーのPsetアイコンをクリックします。ワークスペースエリアが、現在のすべてのPsetが載っているリストを表示します。
追加ボタンをクリックします。Pset作成ウィンドウが開きます。
Psetの番号と名称を入力します。
OKボタンをクリックします。
新しいPsetが追加され、リストがアップデートされます。
Psetの削除
1つ以上のPsetを削除するには、以下のステップを実行します。
-
メニューバーのPsetアイコンをクリックします。ワークスペースエリアが、現在のすべてのPsetが載っているリストを表示します。
-
各Psetを削除するには、ワークスペースエリアの左端の列のチェックボックスにマークを付けます。
-
Delete (削除)ボタンをクリックします。
-
Confirm (確認)ウィンドウで削除を確定します。
選択されたPsetが削除され、リストがアップデートされます。
Psetのコピー
Psetをコピーするには、以下のステップを実行します。
-
コピー元のPsetを右クリックします。
-
Copy (コピー)を選択します。
-
コピー先のPsetを右クリックします。
-
確認するには、Confirm (確認)ウィンドウのYes (はい)ボタンを押します。
新しいPsetのセットアップ
ToolsTalk MTのPsetを設定するときの基本ワークフローは、以下のステップからできています。
-
Psetウィンドウを開く。
-
追加ボタンをクリックします。
-
Pset番号とPset名を選択します。
OKボタンをクリックします。
そのPsetがPsetリストに表示されます。
-
PsetをダブルクリックしてPsetウィンドウを開く、またはOpen (オープン)にマークを付けるもしくはクリックします。
-
全般的設定を入力します。
-
Psetステップを追加します。これは、標準ネジ締付用の最も一般的なセットアップです。
-
ネジ山嵌合いステップ
-
角度ステップ
-
トルクステップ。
-
-
Expand all (すべてを展開する)ボタンを押す、または1つのステップをダブルクリックします。
-
各ステップのステップタイプを設定し、ステップパラメータを設定します。
-
Save (保存)ボタンをクリックして、コントローラの設定を保存します。

例として 3 ステップの締め付け戦略

-
ネジ山を見つけます。
-
ネジ頭がワークに接触するまで下がります。
-
ジョイントをクランプで固定します。
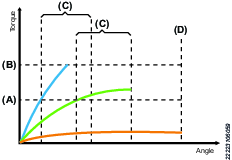
ステップ 1:ネジ山の検索
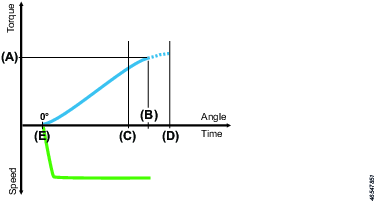
まずネジ山嵌合いステップを使用して、ネジ山を見つけます。
 |
B - 低速、100~150 rpm。 C - ネジがネジ山に入ったときに、増加したトルクで次のステップへ移行 |
ステップ 2:ランダウン
角度ステップを使用して、ネジを下げます。
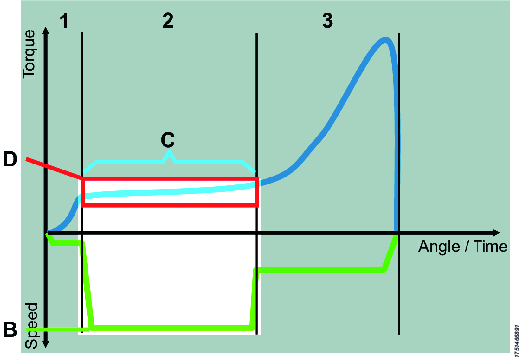 | B - 高速 C - ネジ頭が加工品に接触する前に、ネジ山長に対応する次のステップに移行 D - ネジの下げを監視し、ネジ山の損傷など、不具合について警告を発するためのトルクウィンドウ ねじ頭がワークピースに接触する前に角度ステップが停止することが重要です。そうでない場合、ツールが時間内に停止できないため、望ましくないオーバーシュートを引き起こす可能性があります。 |
ステップ 3:ジョイントのクランプ
トルクステップを使用して、ジョイントをクランプで固定します。
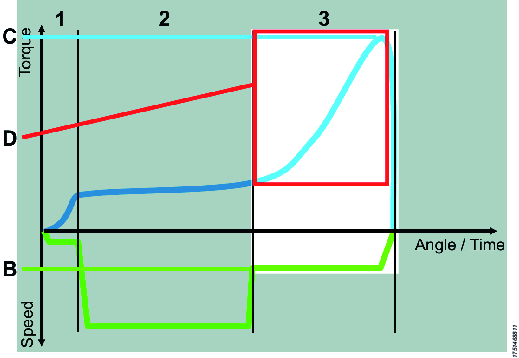 |
B - ツールで設定されている速度 C - 目標トルクに達したときジョイントが仕上がる D - クランプによる締付けを監視し、ワークの破損やワッシャーの紛失など、不具合についての警告を発する、トルクレベルからの角度ウィンドウ |
コントローラのクイック設定に関するPsetの追加
コントローラーを使用してPsetまたは検証プログラムを追加することができます。MTF6000 構成ガイドを参照してください。
Psetウィンドウ
|
GUIオブジェクト |
説明 |
|
Change tool type (ツールタイプの変更) |
オフラインモードでだけ使用可能です。 |
|
Test button (テストボタン) |
アクティブなPsetを開始、停止、リセットできるようにするウィンドウを開きます |
|
Activate button (アクティブ化ボタン) |
現在のPsetをコントローラのアクティブなPsetに設定します。選択されたソースをはProtocol/ToolsTalk MTに設定される必要があります。 |
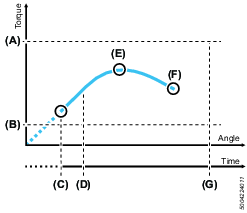
主要な締め付け定義
ネジは、ネジ頭が着座点 (A) でワークピースに接触するまでねじ込まれます。その後ネジは最終トルク (C) に達するまで締め付けられます。ほとんどの場合これはピークトルク (B) と同じですが、最終トルクのほうが低い場合もあります。
クランプ角 (D) とクランプトルク (E) は、着座点とピークトルクの間で測定されます。

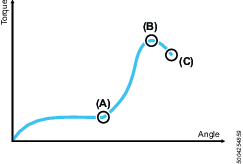
A | シーティングポイント |
B | Peak torque (ピークトルク) |
C | Final torque (最終トルク) |
D | クランプ角 |
E | クランプトルク |
全般的設定
パラメーター | 説明 |
Pset 名: | Psetリストに表示されます。Pset名は結果とともに保管され、コントローラ結果ビューに表示されます。 |
Pset revision (Psetのリビジョン) | Psetのリビジョン番号。 |
Pset created (Psetの作成) | Psetが作成された日付。 |
Pset modified (Psetの変更) | Psetが最後に変更された日付。 |
Configured tool name (設定されたツール名) | Psetがリンクしていたツールタイプ(テキストでのモデルタイプ)。 |
Min. total time (最小合計時間) | 締め付けが完了したと見なされるための、締め付けが実行される最小時間。 |
Max. total time (最大合計時間) | 締め付けが完了したと見なされるための、締め付けが実行される最大時間。 |
Min. total angle (最小合計角) | 締め付け中にツールが回る必要がある最小度数。 |
Max. total angle (最大合計角) | 締め付け中にツールが回ることが許容される最大度数。 |
Trigger lost torque (トリガ喪失トルク) | トリガ喪失トルク値に達してから、締め付けが完了するまでにツールボタンが解除されると、エラーが送信されます。 |
Graph start step (グラフ開始ステップ) | グラフが始まるステップの番号。 |
Torque tuning (トルクの調整) | このPset用のトルク較正を調整します。コントローラーは、測定されたトルクに「(1.0 — トルク調整)」の係数を乗算します。したがって、トルクを正に調整すると、適用されるトルクが増加します。トルク調整 < -0.1 にすることができます |
Angle range start step(角度範囲開始ステップ) | 結果角度の測定を開始するステップを定義します。 |
Angle range stop step(角度範囲停止ステップ) | 結果角度の測定を停止するステップを定義します。 |
Min. angle range(最小角度範囲) | 角度範囲の開始ステップと停止ステップの間でツールが回転する必要のある最小度数。 |
Max. angle range(最大角度範囲) | 角度範囲の開始ステップと停止ステップの間でツールが回転できる最大度数。 |
Requested Bit (要求されたビット) | 要求されたビットがアクセサリ バスビット セレクタから選択されない場合、ツールを無効にします。アクセサリ バスビット セレクタが接続されていない場合、ツールは無効になります。「なし」に設定すると、パラメータは有効になりません。 |
Final report step (最終報告ステップ) | Psetのどの締め付けステップが、結果の最終トルクを報告するかを定義します。通常Psetの最終ステップですが、時として別のステップが報告します。 |
Final report torque (最終報告トルク) | 最終報告ステップが報告するのが、ピークトルク、クランプトルク、最終トルクのいずれかを決定します。 |
Final report angle (最終報告角) | 最終報告ステップが報告するのが、ステップ角、クランプ角、締め付け角のいずれかを決定します。 |
最終着座点角度開始ステップ | 最終座席点角度結果パラメータをどのステップから計算するかを決定します。 |
Bit slip detection (ビットスリップ検出) | (ライセンスされた機能) ビットスリップは、ビットがいつジョイントから滑り出るかを検出する機能です。これはビットまたはネジ頭が損傷している兆候です。 Seating Control Step (シーティングコントロールステップ)中にビットスリップが発生する場合、またはTorque Seating Monitoring (トルクシーティング監視)とビットスリップが無効である場合、シーティングが誤って検出されることがあります。 |
Damaged thread detection (スレッド損傷の検出) | (ライセンスされた機能) ネジ山の損傷を検出します。 |
Tool rehit (ツールリヒット) | リヒットのグローバルコントローラー設定をオーバーライドできる Pset 定義されたリヒットパラメーター。
|
Configure Pset (Psetの設定)
コンフィギュレーションペインはPsetのステップを含みます。
ステップの追加
ステップを追加するには2つの方法があります。
1つのステップを追加するには、Add (追加)ボタンをクリックします。
複数のステップを追加するには、Add (追加)ボタンを右クリックし、追加したいステップの数を選択します。
ステップの削除
1つ以上のステップを削除するには、以下のステップを実行します。
削除したいステップの前にあるチェックボックスにマークを付けます。
Delete (削除)ボタンをクリックします。
Confirm (確認)ウィンドウのYes (はい)ボタンをクリックします。
ネジ山嵌合いステップ
ネジ山嵌合いステップは、通常低回転数 (100~150 rpm)で、ネジの嵌合いを容易にするのに使用されます。移行トルクまたは移行角に達すると、このステップは終了します。移行角が「無限」に設定されている場合、ステップは、移行トルクに達することによってのみ終了できるか、または最大ステップ時間に達したときに異常終了します。
パラメーター | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Transition torque (移行トルク) (A) | ステップトルクが移行トルクに達した場合、ステップが終了したと考えられます。 |
Transition angel (移行角) (B) | ステップ角が移行角に達した場合、ステップは終了したと考えられます。 |
向き | 時計回りまたは反時計回りの締め付け方向。通常の締め付けでは、時計回りの設定を使用します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
Step start delay (ステップ開始遅延) (E) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) (C) | ステップの最小時間の設定。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) (D) | ステップの最大時間の設定。これを超過した場合、コントローラがエラーメッセージを表示します。 |
角度ステップ
角度ステップは、ほとんどの場合、高回転数において、特定の回転数でネジを下げるのに使用されます。角度ステップは通常、目標角に達した時点で終了します。
A | Max. torque (最大トルク) |
B | Min. torque (最小トルク) |
C | Step start(ステップ開始) |
D | 最小ステップ時間 |
E | ピークトルク |
F | ターゲット角/最終トルク |
G | 最大ステップ時間 |
パラメーター | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Target angle (ターゲット角度) (F) | ステップを正常に完了するために達しなければならない角度。 |
向き | 通常の締め付けでは、時計回りの設定を使用します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
Min. torque (最小トルク) (B) | このステップ中は、トルクが設定された最小トルクより大きいことが必要です。トルクが最小トルクより低くなれば、ドライバが停止し、コントローラがエラーメッセージを表示します。 最小トルクが0 cN•mより高く設定されている場合は、角度ステップより前にステップを追加し、角度ステップの開始前に、設定されたトルクに達するようにします。 |
Max. torque (A)(最大トルク (A)) | このステップ中は、トルクが最大トルク値を超えないことが必要です。最大トルクに達すると、ドライバが停止し、コントローラがエラーメッセージを表示します。 |
ステップ開始遅延 | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) (D) | ステップの最小時間の設定。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) (G) | ステップの最大時間の設定。これを超過した場合、コントローラがエラーメッセージを表示します。 |
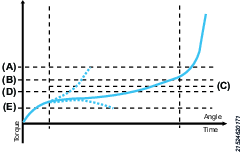
トルクステップ
トルクステップは、ネジの最終締め付けのためと、正しいトルクに達したことの確認のために使用されます。

A | Max. torque (最大トルク) |
B | Target torque(目標トルク) |
C | Min. torque (最小トルク) |
D | Rescinding torque limit(トルク限度の解除) |
E | Tightening angle trigger (締め付け角トリガ) |
F | Tightening angle(締付角) |
G | Min. angle (最小角) |
H | Max. angle (最大角) |
パラメータ | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Target torque (B)(ターゲットトルク (B)) | ジョイントの目標トルク。ステップの最終トルクとピークトルクと同じです。 |
Direction(向き) | 通常の締め付けでは、時計回りの設定を使用します。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (C)(最小トルク (C)) | 最小トルク値に達しない場合、コントローラがエラーメッセージを表示します。 |
Max. torque (A)(最大トルク (A)) | このステップ中は、トルクが最大トルク値を超えないことが必要です。最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Rescinding torque limit (D)(トルク限度の解除 (D)) | このモニタパラメータはこのステップでトルクの下限を設定します。トルクがいかなる時でもこの下限を下回ると締め付けが停止しエラーメッセージが表示されます。 |
Min. angle (G)(最小角 (G)) | ステップ終了時、達していることが必要な角度です。 |
Max. angle (H) (最大角(H)) | 目標トルクに達する前に、この角度を超えないことが必要です。 |
Step start delay (ステップ開始遅延) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
Tightening angle trigger (締め付け角トリガ) (E) | 締め付け角トリガ値に達すると、このステップの角度カウントが開始します。 |
Min. tightening angle (最小締め付け角) | 締め付けが完了したと見なされるためには、締め付け角が最小締め付け角を超えることが必要です。 |
Max. tightening angle (最大締め付け角) (G) | このステップ中、締め付け角が最大締め付け角 (E) の値を超えないことが必要です。最大締め付け角に達すると、ツールは停止し、コントローラがエラーメッセージを表示します。 |
トルクシーティング監視ステップ
このステップは、追加シーティング監視を伴うトルクステップです。シーティングが見つからない場合、締付エラーがトリガされます。クランプトルクとクランプ角データを取得することも可能です。トルクシーティング監視ステップには、所与の目標トルクがあり、シーティング検出を含みます。
パラメータ | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Target torque(目標トルク) | ジョイントの目標トルク。 |
Seating angle displacement (シーティング角変位) | 勾配トリガポイントからシーティングポイントを算出するための角度ウィンドウ。 |
Gradient trigger point (勾配トリガポイント) | ツールがネジ頭がワークに接触したことを検出するときのトルクレベル。これはシーティング角変位のエンドポイントです。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (最小トルク) | 合計トルクが最小トルクより小さい場合、エラーメッセージが表示されます。 |
Max. torque (最大トルク) | このステップ中は、トルクが最大トルク値を超えないことが必要です。最大トルクに達すると、ドライバが停止し、コントローラがエラーメッセージを表示します。 |
Rescinding torque limit(トルク限度の解除) | このモニタパラメータはこのステップでトルクの下限を設定します。トルクがいかなる時でもこの下限を下回ると締め付けが停止しエラーメッセージが表示されます。 |
Min. angle (最小角) | ステップ終了時、達していることが必要な角度です。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. angle (最大角) | ステップ終了時、超えていることが必要な角度です。これを超過した場合、コントローラがエラーメッセージを表示します。 |
Min. clamp torque (最小クランプトルク) | 最小クランプトルクは、ジョイントの異常を検出するのに使用することができます。 |
Max. clamp torque (最大クランプトルク) | 最大クランプトルクは、ジョイントの異常を検出するのに使用することができます。 |
Min. clamp angle (最小クランプ角) | 最小クランプ角は、ジョイントの異常を検出するのに使用することができます。 |
Max. clamp angle (最大クランプ角) | 最大クランプ角は、ジョイントの異常を検出するのに使用することができます。 |
Step start delay (ステップ開始遅延) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
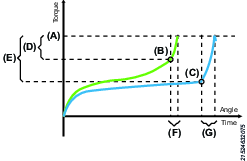
シーティングコントロールステップ
このステップは、ネジ切り、ネジ山形成ネジ、または芯合わせ不良の部品からの側面負荷のあるジョイントなど、下げ摩擦が増加したジョイントに特化されています。
このタイプの用途では、ジョイントごとにバラツキがあるのが一般的です。このステップの主目的は、遊動ネジをなくし、ジョイントにバラツキがある場合でも、すべてのジョイントに対して同じクランプトルクまたはクランプ角を適用することです。このステップでは、クランプ角に対するクランプトルクの勾配を監視し、ネジがいつ着座するか、すなわちネジ頭がいつジョイント面に接触するかを検出することができます。シーティングポイントから、設定したトルクや角度が適用されます。合計トルクや角度は、締付けごとに異なりますが、同じクランプトルクを使用してジョイントを圧縮します。
この方法は以下のように機能します。
トルクレベル、すなわちTorque gradient change (トルク勾配変化) は、ネジ頭が加工品に接触しているポイントを検出するために設定されます。
トルク勾配がトルク勾配トリガポイントを超えると、シーティングポイントが検出されます。トルク勾配は、分析ウィンドウの締付グラフに表示することができます。
トルクカーブが上昇し始めるこのポイントから、シーティングポイントが算出されます。この算出は、勾配トリガポイントからトルク平均値を算出し、シーティング角変位から角度を逆算することで行われます。
このステップタイプでは、工具の校正対象よりも低い目標トルクと高速化が可能です。これは、目的の結果が得られない可能性があることを意味します。このような場合は、速度を変更して、より望ましいクランプ値を得てください。

パラメータ | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Final tightening method (最終締付法) | 締付けがクランプトルクを使用するが、クランプ角を使用するかを決定します。 |
Clamp torque (クランプトルク) (A) / Clamp angle (クランプ角) (B) | クランプトルクまたはクランプ角の値を設定します。 |
seating angle displacement (シーティング角度変位) (G) | 勾配トリガポイントからシーティングポイントを算出するための角度ウィンドウ。 |
Gradient trigger point (勾配トリガポイント) (H) | ツールがネジ頭がワークに接触したことを検出するときのトルクレベル。これはシーティング角変位のエンドポイントです。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (最小トルク) (L) | シーティング制御ステップの合計トルクが最小トルクよりも小さければ、エラーメッセージが表示されます。 |
Max. torque (最大トルク) (D) | このステップ中は、最大トルク値を超えないことが必要です。最大トルクに達すると、ドライバが停止し、コントローラにエラーメッセージが表示されます。 |
Min. angle (最小角) (F) | ステップ終了時、達していることが必要な角度です。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. angle (最大角) (E) | 目標トルクに達する前に、この角度を超えないことが必要です。これを超過した場合、コントローラがエラーメッセージを表示します。 |
Min. clamp torque (最小クランプトルク) | 最小クランプトルクは、ジョイントの異常を検出するのに使用することができます。 |
Max. clamp torque (最大クランプトルク) | 最大クランプトルクは、ジョイントの異常を検出するのに使用することができます。 |
Min. clamp angle (最小クランプ角) | 最小クランプ角は、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp angle (最大クランプ角) | 最大クランプ角は、ジョイントの異常を検出するのに使用することができます。角度が最大クランプ角より大きければ、コントローラがエラーメッセージを表示し、ツールが停止します。 |
Step start delay (ステップ開始遅延) (M) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) (J) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) (K) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
seating angle displacement (シーティング角度変位) (G) | 勾配トリガポイントからシーティングポイントを算出するための角度ウィンドウ。 |
Gradient trigger point (勾配トリガポイント) (H) | ツールがネジ頭がワークに接触したことを検出するときのトルクレベル。これはシーティング角変位のエンドポイントです。 |
摩擦制御ステップ
摩擦制御ステップは、ランダウン段階で平均トルク (摩擦) を測定できる、角度ステップのスマートなバージョンです。目標摩擦制御角度に達すると、ステップは終了します。平均トルクが平均トルク制限内にない場合、ステップは失敗します。トルクが最大/最小トルク制限を上回ったり下回ったりした場合でも、締め付けは中止されます。
A | Max. torque (最大トルク) |
B | 最大平均トルク |
C | 平均トルク |
D | 最小平均トルク |
E | Min. torque (最小トルク) |
パラメーター | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
摩擦制御角度 | ステップを正常に完了するために達しなければならない角度。 |
向き | 時計回りまたは反時計回りの締め付け方向。通常の締め付けでは、時計回りの設定を使用します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
最小トルク(E) | ステップ中、トルクは設定した最小トルクを下回ってはなりません。トルクが最小トルクより低くなった場合、ドライバが停止し、コントローラがエラーメッセージを表示します。 |
Max. torque (A)(最大トルク (A)) | このステップ中は、トルクが最大トルク値を超えないことが必要です。最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
最小平均トルク (D) | ステップ終了時のステップの最小平均トルク値です。ステップ終了時に最小平均トルクに達しなかった場合、締め付けは中止され、結果は NG になります。 |
最大平均トルク(B) | ステップ終了時のステップの最大平均トルク値です。ステップ終了時に最大平均トルクを超えた場合、締め付けは中止され、結果は NG になります。 |
ステップ開始遅延 | トリガからツール始動までの遅延時間。 |
最小ステップ時間 | ステップの最小時間の設定。これに達しない場合、コントローラがエラーメッセージを表示します。 |
最大ステップ時間 | ステップの最大時間の設定。これを超過した場合、コントローラがエラーメッセージを表示します。 |
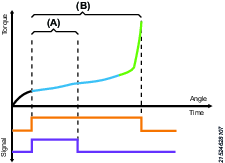
デジタル入力ステップ
デジタル入力ステップは、コントローラが特定の信号を受信するまで、進行中の締付けを一時停止します。
これは、ホールドステップではありません。ツールは締め付けを一時停止し、トルクを保持しません。

A | 締め付けを一時停止し、信号を待ちます |
B | 締め付けを再開します |
C | 信号高 |
D | 信号低 |
パラメータ | 説明 |
Input signal(入力信号) | 外部監視 1~8 |
Signal flank (信号フランク) |
|
Max. step time (最大ステップ時間) | ステップの最大時間の設定。これを超過した場合、コントローラがエラーメッセージを表示します。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
デジタル出力ステップ
デジタル出力ステップは、特定の信号を高/低に設定します。信号は、締め付けまたは特定の期間が完了するまで設定できます。
A | 特定の期間、信号が「高」に設定されます |
B | 締め付けが完了するまで信号が「高」に設定されます |
パラメータ | 説明 |
Output signal(出力信号) | External monitored 1-10(外部監視 1~10) |
信号モード |
出力信号は、モードに関係なく、締め付け終了時に常にリセットされます。 |
信号レベル |
|
信号持続期間 | 出力を有効にする期間を決定します。 |
スマート嵌合いステップ
スマート嵌合いは、通常低回転数 (100~150 rpm)で、ネジの嵌合いを容易にするのに使用されます。スマート噛み合いでは、まず噛み合いトルクに達し、次に設定された検証角度範囲内で、最大トルクを下回り、かつ噛み合いトルクを超える必要があります。検証角度範囲と締め付けステップ角度の間のトルクを監視することにより、ステップでねじの傾きとねじの欠落を即座に検出できます。
設定された噛み合いトルクに達すると、可能な噛み合いがトリガーされます。噛み合いトルクに達した後、コントローラーは設定された検証角度範囲でのトルクを監視して、ネジが正しく噛み合っていることを確認します。締め付けが最大トルクまたは最大角度に達すると、再試行アクションがトリガーされます。再試行アクションは、再試行または中止のいずれかで構成されます。ユーザーは、さまざまなエラーに応じて締付けがどのように作動するかを定義できます。最大トルクが原因で再試行アクションがトリガーされた場合は、ねじが傾いていることが原因である可能性が高いため、再試行アクションとしては再試行が推奨されます。
最大角度が原因で再試行アクションがトリガーされた場合、エラーはネジの欠落によって引き起こされた可能性が高いため、再試行アクションとしては中止が推奨されます。
速度 | ツール速度は有効範囲内で設定することができます。 |
嵌合トルク (A) | 嵌合トルクに達した後に検証角度を有効にします。 |
検証角度 (C) | 指定された角度でのトルクを監視して、トルクが嵌合トルクを上回り、かつ最大トルクを下回っていることを確認します。これらの要件が満たされると、ステップは完了します。 |
再試行アクション |
|
緩め角法 |
|
緩め角度 | 再試行に使用されるユーザー定義の角度。 |
緩めトルク | 緩め時の最大トルク。 |
緩め速度 | 再試行がトリガーされた場合の緩め速度。 |
向き | 時計回りまたは反時計回りの締め付け方向。通常の締め付けでは、時計回りの設定を使用します |
再試行信号 | 再試行中、ツールが緩めを行っている場合に、どの外部監視入力をアクティブにするかを定義します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
最大トルク (B) | 最大トルクに達すると、再試行アクションがトリガーされます。 |
最大角度 (D) | 最大角度に達すると、再試行アクションがトリガーされます。 |
再試行制限 | 再試行アクションが実行された後、締め付けがネジの締め直しを試みる回数。 |
ステップ開始遅延 | トリガからツール始動までの遅延時間。 |
最小ステップ時間 | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します |
最大ステップ時間 | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
スマートトルク着座モニタリング(スマートTSM)
スマートトルク着座モニタリングステップは、トルクステップのスマートなバージョンで、まったく新しい着座検出アルゴリズムを採用しています。スマートTSMは、ねじを目的の目標トルクに締め付け、ねじが着座したかどうかも監視します。着座していない場合、ネジが浮いていると、NG 着座が検出されなかったと報告します。コントローラは、着座検出を計算するために、推定クランプトルクとクランプ角度を知る必要があります。締め付け中にトルク勾配が低くなりすぎると、検出された着座点が拒否される可能性があります。その後、誤った着座ポイントと見なされ、引き続き別の着座ポイントを探し続けます。
A | 目標トルク |
B | Seating point(シーティングポイント) |
C | Seating point(シーティングポイント) |
D | クランプトルク |
E | クランプトルク |
F | クランプ角 |
G | クランプ角 |
速度 | ツール速度は有効範囲内で設定することができます。 |
目標トルク | ジョイントの目標トルク。 |
クランプトルク | 締め付け時の予想されたクランプトルクです。 |
クランプ角 | 締め付けに予想されるクランプ角度です。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (最小トルク) | ステップ終了時に最小トルクに達しなかった場合は、エラーメッセージが表示されます。 |
Max. torque (最大トルク) | ステップが終了する前に最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Rescinding torque limit(トルク限度の解除) | このモニタパラメータはこのステップでトルクの下限を設定します。トルクがいかなる時でもこの下限を下回ると締め付けが停止しエラーメッセージが表示されます。このパラメーラーを0に設定するとトルク限度の解除を無効にします。 |
Min. angle (最小角) | ステップ終了時に最小角度に達しなかった場合は、エラーメッセージが表示されます。 |
Max. angle (最大角) | ステップが終了する前に最大角度に達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp torque (最小クランプトルク) | 最小クランプトルクは、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp torque (最大クランプトルク) | 最大クランプトルクは、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp angle (最小クランプ角) | 最小クランプ角度は、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp angle (最大クランプ角) | 最大クランプ角度は、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Step start delay (ステップ開始遅延) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
スマート着座コントロールステップ(スマートSCS)
このステップは、ネジ切り、ネジ山形成ネジ、または芯合わせ不良の部品からの側面負荷のあるジョイントなど、下げ摩擦が増加したジョイントに特化されています。このタイプの用途では、ジョイントごとにバラツキがあるのが一般的です。このステップの主な目的は、浮きネジをなくし、ジョイントにバラツキがある場合でも、すべてのジョイントに対して同じクランプトルクまたはクランプ角を適用することです。このステップでは、クランプ角に対するクランプトルクの勾配を監視し、ネジがいつ着座するか、すなわちネジ頭がいつジョイント面に接触するかを検出することができます。着座点から、設定されたクランプトルクまたはクランプ角度が適用されます。総トルクまたは角度は締め付けごとに異なりますが、ジョイントにかかる圧には同じ量のクランプトルク、またはクランプ角度が使用されます。クランプトルクとクランプ角度は、着座を検出した後の予測をコントローラに伝えるために設定されています。(着座検出は、これらの値に基づいて計算されます)。締め付け中にトルク勾配が低くなりすぎると、検出された着座点が拒否される可能性があります。その後、誤った着座ポイントと見なされ、引き続き別の着座ポイントを探し続けます。
このステップタイプでは、工具の校正対象よりも低い目標トルクと高速化が可能です。これは、目的の結果が得られない可能性があることを意味します。このような場合は、速度を変更して、より望ましいクランプ値を得てください。

A | Peak torque (ピークトルク) |
B | Peak torque (ピークトルク) |
C | Seating point(シーティングポイント) |
D | Seating point(シーティングポイント) |
E | クランプトルク |
F | クランプトルク |
G | クランプ角 |
H | クランプ角 |
速度 | ツール速度は有効範囲内で設定することができます。 |
Final tightening method (最終締付法) | 締付けの目標にクランプトルクを使用するか、クランプ角を使用するかを決定します。 |
クランプトルク | 締め付け時の予想されたクランプトルクです。 |
クランプ角 | 締め付けに予想されるクランプ角度です。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (最小トルク) | ステップ終了時に最小トルクに達しなかった場合は、エラーメッセージが表示されます。 |
Max. torque (最大トルク) | ステップが終了する前に最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. angle (最小角) | ステップ終了時に最小角度に達しなかった場合は、エラーメッセージが表示されます。 |
Max. angle (最大角) | ステップが終了する前に最大角度に達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp torque (最小クランプトルク) | 最小クランプトルクは、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp torque (最大クランプトルク) | 最大クランプトルクは、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp angle (最小クランプ角) | 最小クランプ角度は、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp angle (最大クランプ角) | 最大クランプ角度は、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Step start delay (ステップ開始遅延) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
緩め
緩めステップは、ネジを緩めるまたは外すために使用されます。
パラメーター | 説明 |
緩めトルク | 緩めに許容される最大トルク。 |
緩め角度 | 緩めに許容される最大角。 |
緩め速度 | 緩め速度。 |
Loosening max time (緩め最大時間) | 緩めの最大時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |
Loosening vacuum pump (緩め真空ポンプ) | 外部真空ポンプをONにするデジタル出力。 |
Loosening start delay (緩め開始遅延) | トリガからツール始動までの遅延時間。 |
NG で緩め強制 | 次の締め付けを行う前に、ユーザーに緩めを強制します。この機能は、バッチシーケンスからの実行では無効になります。 |
ネジのピックアップ
ネジのピックアップを使用すると、締め付けを始める前にオペレータはネジを取り上げることができます。最初の開始信号がネジのピックアップ機能を作動させ、2番目の開始信号が締め付けを作動させます。つまり、締め付け手順を有効にするには、開始信号を2回、押すか、トリガーする必要があります。
Screw pickup (ネジのピックアップ)が有効な場合の締め付け手順
開始信号を有効にして、ネジを持ち上げます。
ネジを正しい位置に配置します。
開始信号を再度有効にして締め付けを開始します。
パラメータ | 説明 |
|---|---|
位置合わせされていない限界 | ネジを持ち上げられていることを確認するには真空度を要します。 |
位置合わせされた限界 | ネジが位置合わせされていることを確認するには真空度を要します。 |
ネジのピックアップ | 機能が有効になっているかどうかを示します。 |
ネジのピックアップは、ハンドヘルド操作と自動操作の両方に使用できます。位置合わせされていない限界および位置合わせされた限界のパラメータには、真空ポンプMTの使用が必要です。これは、MTF6000リビジョンC以降のコントローラとのみ互換性があります。
ネジのピックアップが有効化されている場合、次のパラメータを校正することが出来ます:
パラメータ | 説明 |
|---|---|
Vacuum pump (真空ポンプ) | ネジのピックアップ機能を有効化すると真空ポンプが始動します |
ピックアップ時にビットを回転 | ビットをネジに取り付け易いようにするため、ビットは反時計回りにゆっくり回転します。 |
Timeout (タイムアウト) | ピックアップにかかる時間間隔を設定します。この時間を超えると、コントローラはビジー状態からアイドル状態に戻ります。 |
ガイドライト | ネジピックアップ機能を有効にすると、MT ツールガイドライトが有効化されます。 |
ピックアップガイド
真空ピックアップガイドは真空ポンプ MT(8432 0854 00)および MTF6000 変更C以降のコントローラで使用できます。PICKUP GUIDE(ピックアップガイド)をクリックしてウィザードを開きます。真空ポンプ MT が接続されている場合、真空装置は自動的に始動します。
ウィザードのページで制限値を上下に動かすと、制限値を設定することが出来ます。SETUP GUIDE(セットアップガイド)をクリックすると、2段階のセットアップガイドも使用できます:
画面上の案内に従い、ネジがピックアップされた時で位置合わせされていない場合の値を設定します。
画面上の案内に従い、ネジがピックアップされた時で位置合わせされている場合の値を設定します。
この値はいつでも手動で更新することが出来ます。
カスタムビュー
カスタムビューは、コントローラの最終ビューのカスタマイズを可能にします。選択されたPsetの実行中だけ、選択された情報が表示されます。Psetが選択されない場合、スクリーンには何も表示されません。
スクリーンは、1個から4個のフィールドを表示するように設定できます。各フィールドは、全般的な情報またはステップ情報を表示できます。
最初のフィールドの背景は白色で、次の背景は灰色です。これは焦点を与えるためであり、その他の意図はありません。
全般的データ
パラメータ | 説明 |
|---|---|
Final torque(最終トルク) | 締め付けの最終トルクを表示します。最終トルクは、Psetの全般的設定で設定することができます。 |
Peak torque (ピークトルク) | 締め付けの最大達成トルクを表示します。 |
Tracking torque (トルクの追跡) | 締め付け中のトルクを追跡します。 |
Final angle (最終角度) | 締め付けの最終角を表示します。最終角は、Psetの全般的設定で設定することができます。 |
Total angle (合計角) | 締め付けの合計角を表示します。 |
Tracking angle (角度の追跡) | 締め付け中の角度を追跡します。 |
Tightening error (締め付けエラー) | 現在のエラーメッセージ。現在のエラーがない場合は表示されません。 |
Pset name and number (Psetの名称と番号) | Psetの番号と名称を表示します。 |
Controller date(コントローラの日付) | コントローラの日付。 |
Controller name (コントローラ名) | コントローラ名 (Controller settings (コントローラ設定)の下で設定されます)。 |
Station name (ステーション名) | ステーション名 (Controller settings (コントローラ設定)の下で設定されます)。 |
Line name (ライン名) | ライン名 (Controller settings (コントローラ設定)の下で設定されます)。 |
Logged in user (ログインしているユーザ) | ユーザレベルがログインしている(L1~L3)か否かを表示します。ユーザがログインしていない場合は「-」を表示します。 |
Tightening duration (締め付け時間) | 最終締め付けの時間(秒)。 |
Tool serial number(ツールシリアル番号) | 接続されているツールのシリアル番号。 |
Tool type (ツールタイプ) | 接続されているツールのタイプ。 |
Calibration date (較正日付) | 最終較正の日付。 |
Tool statistics (ツールの統計) | ツール統計、最終較正以後のOK締め付けまたはNG締め付けを表示します。 |
Select source (ソースの選択) | Psetのソースとバッチシーケンス選択を表示します。 |
Controller time(コントローラの時間) | コントローラ時間。 |
Tool temp(ツール温度) | ツールの現在温度。 |
Vacuum pressure(真空圧力) | リアルタイムの真空圧を kPa で表示します。 |
ステップデータ
パラメータ | 説明 |
|---|---|
ステップ番号 | パラメータ「ステップデータ」がその値を取得する取得先のステップを選択します。 |
Step peak torque (ステップピークトルク) | 選択されたステップの最大達成トルクを表示します。 |
Step clamp torque (ステップクランプトルク) | 選択されたステップの達成クランプトルクを表示します。 |
Step transition torque (ステップ移行トルク) | 選択されたステップの最大最後の測定されたトルクを表示します。 |
Step angle (ステップ角) | 選択されたステップの達成された角度を表示します。 |
Step clamp angle (ステップクランプ角) | 選択されたステップの達成されたクランプ角を表示します。 |
Seating point(シーティングポイント) | ステップのシーティングトルクを表示します。 |
Tightening angle(締付角) | 選択されたステップの締め付け角度を表示します。 |
検証プログラム
検証プログラムは、IAM QA コントローラと併用してツールの精度を検証するために使用できる特定の形式の Pset です。
検証プログラムは、パラメータ入力が制限されたトルクステップの一形態です。ウィンドウ制限は締め付け自体には設定されませんが、測定されたトルクに制限を設定するためにIAM QAコントローラーに送信することができます。
全般的データ
パラメータ | 説明 |
タイトル | 検証プログラムリストに表示されます。検証プログラム名は結果とともに保存され、コントローラの結果ビューに表示されます。 |
Revision(リビジョン) | 検証プログラムのリビジョン番号。 |
Created(作成) | 検証プログラムが作成された日付。 |
Modified(変更) | 検証プログラムが最後に変更された日付。 |
Configured tool name (設定されたツール名) | 検証プログラムがリンクしていたツールタイプ(テキストでのモデルタイプ)。 |
Control limit(制御限界) | 基準値の次からの偏差をどの程度許容するか:
|
Verification size(検証サイズ) | ツールのテストのために実行する締め付け回数。 |
Verification mode(検証モード) | 検証結果が何によってトリガーされるかを決定します。
|
Measurement Evaluation mode(測定評価モード) | 測定では、ターゲットまたはツールのピーク値をQA基準および管理限界と比較して、測定がOKまたはNGであるかどうかを確認します。現在制御されているツールは、[ターゲット対基準] にロックされています。(読み取り専用パラメーター)トランスデューサー内蔵ツールは編集可能であり、次のいずれかを選択できます。
|
Minimum CMK(最小CMK) | CMK の最小許容値(0 に設定されている場合、chef を無効にします)。 |
On Verification complete(検証完了時) | 検証プログラムの完了後に何が起こるかを決定します。
|
Operator ID required(オペレーターIDが必要) |
|
ステップデータ
パラメータ | 説明 |
|---|---|
Speed(速度) | テスト中にツールが動作する速度。 |
Target torque(目標トルク) | テストが実行される目標トルク。 |
Vacuum enabled(真空が有効) | 有効にすると、テスト中に真空がアクティブになります。 |
Step start delay (ステップ開始遅延) | 締め付けの開始遅延を設定します |
バッチシーケンス

この機能は、1つの加工品の組立てに関する複数の締付手段により、ネジジョイントのシーケンスを制御する可能性を提供します。
バッチ
バッチをセットアップするためには、定義済みのPsetとバッチサイズが必要です。バッチサイズとは実行される締付け作業の数です。
修理Psetと修理限度を定義することが可能です。締付けが失敗した場合、修理限度がインクリメントされます。修理企図の数が修理カウンタを超えた場合、バッチシーケンス全体が失敗します。
開始からと締付けからの2つのタイムアウト値を設定することが可能です。バッチが設定値より長い時間を費やした場合、バッチは失敗し、異常終了します。
イベント
イベントステップは、ワークステーションと対話し、締付プロセスのフローを制御するのに、使用することができます。
入力
入力ステップは、バッチシーケンス DI1-12 信号が Signal flank (信号フランク) パラメーターで設定された目的の状態になるのを待ちます。Signal flank は、入力ステップがどのような信号または信号変化に反応するかを定義します。低から高への変化 (positive flank)、高から低への変化 (negative flank)、単に高/低である、または任意の信号変化 (any) があります。
出力
出力ステップは、バッチシーケンス DO1-8 信号が Output signal level (出力信号レベル) パラメーターで設定された目的の状態になるのを待ちます。
出力信号レベルは、信号を高 (1) に設定するか、低 (ゼロ) に設定するかを定義します。出力モードは、信号を常時、出力信号レベルに設定するか、パルス (持続時間) に設定するかを定義します。持続時間の場合は、パルスの時間を選択する必要があります。パルスの最長時間は3秒です。もっと長いステップが必要な場合は、設定モードで、間に遅延ステップを有する2つの出力ステップを使用することが可能です。
遅延
0.01~30秒の任意の時間、シーケンスを遅延させることが可能です。
高度スキャン
このステップでは、ユーザはバーコードをスキャンする、またはICタグを読み取る必要があります。このデータは、追跡可能にするために、締付結果データとともに保管することができます。
このステップを設定するには、1つ以上の設定済み識別子を必要とします。識別子は、スキャンされたストリングが正しいか否かを検証するのに使用する規則です。
このステップは4個までの識別子を収容します。これは、製品シリアル番号におけるバラツキを管理するためのものです。たとえば、それは、スキャンが製品の1つのモジュールのシリアル番号を保管するということです。モジュールは、2個の異なるサプライヤから来て、異なるシリアル番号を持つことが可能です。両タイプのシリアル番号は、正しいものとして受容されます。
シンプルスキャン
このステップでは、ユーザはバーコードをスキャンする、またはICタグを読み取る必要があります。このデータは、追跡可能にするために、締付結果データとともに保管することができます。
この情報はカスタムIDに保存されます。確認はされません。
入力監視ステップ
入力監視ステップは、バッチシーケンス中、デジタル入力レベルを監視するのに使用することができます。トリガされると、バッチシーケンスは中止され、シーケンスが再開されます。
Bit selector (ビットセレクタ)
ビットセレクタステップを使用して、オペレータが続行する前にビットを変更するように強制することができます。
バッチシーケンスリストの概要
各行は1つのバッチシーケンスを表します。列は次の情報を含んでいます。
バッチシーケンスを選択するためのチェックボックス
番号
名称、ユーザが定義する名前
締め付け
アクティブ
最終変更
各列の見出しをクリックして、リストを並べ替えることができます。
バッチシーケンスの追加
バッチシーケンスを追加するには、以下のステップを実行します。
-
Menu (メニュー)バーのBatch sequence (バッチシーケンスアイコンをクリックします。ワークスペースエリアは、現在のすべてのバッチシーケンスが記載されているリストを表示します。
-
追加ボタンをクリックします。バッチシーケンス作成ウィンドウが開きます。
-
バッチシーケンスの番号と名称を入力します。
-
OKボタンをクリックします。
新しいバッチシーケンスが選択番号の欄に追加され、リストがアップデートされます。
バッチシーケンスの削除
バッチシーケンスを削除するには、以下のステップを実行します。
-
各バッチシーケンスを削除するには、ワークスペースエリアの左端の列のチェックボックスにマークを付けます。
-
DELETE (削除)ボタンをクリックします。
-
Confirm (確認)ウィンドウの削除を確定します。
選択されたバッチシーケンスが削除され、リストがアップデートされます。
バッチシーケンスのコピー
バッチシーケンスをコピーするには、以下のステップを実行します。
-
コピー元のbatch sequence (バッチシーケンス)を右クリックします。
-
Copy (コピー)を選択します。
-
コピー先のbatch sequence (バッチシーケンス)を右クリックします。
-
Paste (貼付)を選択します。
-
確認するには、Confirm (確認)ウィンドウのYes (はい)ボタンを押します。
全般的設定
パラメーター | 説明 |
バッチシーケンス名 | バッチシーケンスリストに記載されています。 コントローラの結果スクリーンに表示されます。 バッチシーケンスで得られた締付結果とともに保存されます。 |
Batch sequence revision (バッチシーケンスのリビジョン) | バッチシーケンスのリビジョン。 |
Batch sequence created (バッチシーケンスの作成) | バッチシーケンスが作成された日付。 |
Batch sequence modified (バッチシーケンスの変更) | バッチシーケンスが最後に変更された日付。 |
Beep on error (エラービープ音) | 有効になっていれば、バッチシーケンスが失敗した場合、コントローラがビープ音を発します。 |
Abort time (異常終了時間) | バッチシーケンスがこれより長い時間を費やした場合、バッチシーケンスは失敗し、異常終了して、エラーメッセージが表示されます。 |
バッチシーケンス完了時に識別子をリセット | 有効にすると、コントローラはバッチシーケンスの完了時にカスタム ID 1 ~ 4 の内容をクリアします。 |
設定
コンフィギュレーションペインは、バッチシーケンスのバッチ、イベントまたは情報ステップを含みます。
バッチ、イベントまたは情報ステップ
ステップを追加するには2つの方法があります。
-
1つのステップを追加するには、Add (追加)ボタンをクリックします。
-
複数のステップを追加するには、Add (追加)ボタンを右クリックし、追加したいステップの数を選択します。
-
Add (追加)ボタンをクリックします。
バッチ、イベントまたは情報ステップの削除
バッチ、イベントまたは情報ステップを削除するためには、以下のステップを実行します。
-
削除したいバッチ、イベントまたは情報ステップの前にあるチェックボックスにマークを付けます。
-
Delete (削除)ボタンをクリックします。
-
Confirm (確認)ウィンドウのYes (はい)ボタンをクリックします。
バッチパラメータ
バッチは、1つの定義済みPsetを伴う一連の締付けです。
パラメータ | 説明 |
Pset number(Pset番号) | 使用するPsetの数。 |
Batch size(バッチサイズ) | 選択されたPsetを伴う締付けの数。 |
Repair mode (修理モード) | 有効/無効。 有効であれば、締付けエラーが発生するまで、緩めトリガは自動的に無効になります。緩めトリガが有効であれば、ツールトリガは無効です。緩め作業のあと、修理Psetモードは有効です。 |
Increment batch counter on (バッチカウンタONのインクリメント) | OKまたはOK/NG。OK締付けにおいてのみ、またはOKおよびNG締付けにおいて、バッチカウンタの数が増加します。 |
失敗した場合にNGにしません。 | バッチ中の許容失敗締付けの最大数。 |
Repair Pset (Psetの修理) | Psetの修理を選択します。 |
Repair limit (修理限度) | 締付けが失敗した場合、修理限度がインクリメントされます。修理企図の数が修理カウンタを超えた場合、バッチシーケンス全体が失敗します。 |
From start (開始から) | バッチステップの最大実行時間。バッチステップがこれより長い時間を費やした場合、バッチシーケンスは失敗し、異常終了して、エラーメッセージが表示されます。 |
From tightening (締付けから) | 最初の締付けの開始からのバッチステップカウンティングの最大実行時間。バッチステップがこれより長い時間を費やした場合、バッチシーケンスは失敗し、異常終了して、エラーメッセージが表示されます。 |
イベントパラメータ
パラメーター | 説明 |
イベントタイプ | 高度なスキャン、入力、出力、遅延、簡易スキャン、入力モニター、またはビットセレクター。 |
Advanced scan (高度なスキャン)
パラメータ | 説明 |
Identifier source (識別子ソース) | プロトコル、スキャナ、ほか |
Identifier rule 1-4 (識別子規則1~4) | 着信識別ストリングを構文分析する、4個までの識別子規則。 |
Information text (情報テキスト) | 高度なスキャンステップ中に、スクリーン上に表示されるユーザ定義テキスト。 |
Timeout (タイムアウト) | 高度なスキャンがこれより長い時間を費やした場合、バッチシーケンスは失敗するか、異常終了します。 |
入力
パラメーター | 説明 |
Input signal (入力信号) | どのバッチシーケンス DI1-12 信号を待つかを決定します。 |
Signal flank (信号フランク) | ステップがポジティブ/ネガティブ/あらゆるフランクまたはポジティブ/ネガティブレベルに応答するか否かを決定します。 |
Timeout (タイムアウト) | 入力ステップがこれより長い時間を費やした場合、バッチシーケンスは失敗するか、異常終了します。 |
Information text (情報テキスト) | ステップ中に、スクリーン上に表示されるユーザ定義テキスト。 |
出力
パラメーター | 説明 |
Output signal (出力信号) | どのバッチシーケンス DO1-8 を設定するかを決定します。 |
出力信号モード | 信号が制限時間なしで設定されるか、設定時間だけ設定されるかを決定します。 |
Output signal level (出力信号レベル) | 出力が高に設定されるか、低に設定されるかを決定します。 |
Output signal duration (出力信号持続時間) | 信号モードが持続時間に設定されている場合、表示され、出力がアクティブな時間を決定します。 |
Delay (遅延)
パラメータ | 説明 |
Delay time (遅延時間) | イベントがアクティブであり続ける時間を決定します。0.01~30秒の範囲内で設定することができます。 |
Simple scan (シンプルスキャン)
パラメータ | 説明 |
Identifier source (識別子ソース) | プロトコル、スキャナ、ほか |
Save destination (保存先) | 1つのカスタムIDに保存されます。 |
Information text (情報テキスト) | シンプルスキャンステップ中に、スクリーン上に表示されるユーザ定義テキスト。 |
Timeout (タイムアウト) | シンプルスキャンがこれより長い時間を費やした場合、バッチシーケンスは失敗し、異常終了して、エラーメッセージが表示されます。 |
Key (キー) | ユーザが定義し、データとともにカスタムIDに保存される静的テキスト。 |
Input monitor (入力監視)
入力監視ステップは、バッチシーケンス中、デジタル入力レベルを監視するのに使用することができます。入力監視を有効にすると、入力監視はバッチシーケンスが終了するまで、または無効になるまでアクティブです。
モニタエラーがトリガされると、バッチシーケンスエラーが作動し、シーケンスが中止されます。
パラメータ | 説明 |
Monitor mode (監視モード) | 入力監視を有効または無効にします。入力監視を有効にすると、バッチシーケンスが終了するまで、または無効になるまでアクティブです。 |
Input signal (入力信号) | 監視するバッチシーケンス入力信号を選択します。入力信号は、I/Oコンフィギュレーションの実際の入力に割り当てることが必要です。 |
Trigger error on (トリガーエラーオン) | 信号が高または低のエラートリガ状態を想定している場合、バッチシーケンスは異常終了し、バッチシーケンスエラーがアクティブになります。 |
Bit selector (ビットセレクタ)
ビットセレクタステップは、ステップを完了するために特定のビットをピックアップするようにユーザーを強制します。
Digital I/O bit selector (デジタル I/O ビットセレクタ)
ビットが選択されているかどうかを検出するには、デジタル入力機能「Select bit 0-3」をリンクする必要があります。ビットセレクタイベントは、デジタル出力機能「ビット0〜3のロック解除」を常に設定して、外部デバイスに対して選択するビットを識別します。
「ロック解除ビット」と「選択ビット」は両方とも計算バイナリです。
選択ビット0重量= 1
選択ビット1重量= 2
選択ビット2重量= 4
選択ビット3重量= 8
例:[イベント] が [ビット #7] を取るように設定されている場合、イベントステップを完了するには、[選択ビット 0]、[選択ビット 1]、[選択ビット 2] を高くする必要があります。(1 + 2 + 4 = 7)
Accessory Bus bit selector (アクセサリバスビットセレクタ)
アクセサリバスは独自のプロトコルを使用しており、デジタル I/O とは関係ありません。アクセサリバスビットセレクタを機能させるために [選択ビット] をリンクする必要はありません。
例:イベントがビット #7 を取得するように設定されている場合、セレクタインジケーター LED は、選択するビット (位置番号 7 にあるビット) を示します。
パラメーター | 説明 |
Requested Bit (要求されたビット) | ステップを続行するには、オペレーターが選択するビットを選択します。最大8つの異なるビットを選択できます。(これらのビットは構成の設定とは無関係であり、選択された場合、他のコマンドは実行されません。) |
Identifier source (識別子ソース) | 信号源を、デジタル入出力またはアクセサリバスから選択します。 |
Information parameters (情報パラメータ)
|
パラメータ |
説明 |
|
Information text (情報テキスト) |
情報ステップ中に、スクリーン上に表示されるユーザ定義テキスト。 |
|
Information transition mode (情報移行モード) |
このパラメータは情報ステップの終了の仕方を定義します。情報ステップは、任意の時間後に、またはOKボタンを押したあとに、次のステップに移行することができます。 |
|
Information transition time (情報移行時間) |
移行モードが選択された場合、時間を入力することができます。 |
|
Buzzer frequency (ブザー周波数) |
ブザーの周波数。 |
|
Buzzer duration (ブザー持続時間) |
ブザーの持続時間 - バッファを望まない場合は、ゼロに設定します。 |
識別子

識別子は、オペレーター ID やシリアル番号などの貴重な情報を各結果に保存したり、コントローラーの次のタスクを選択したりするために使用されます。
識別文字列は、オープンプロトコル、フィールドバス、またはスキャナーのいずれかを介してコントローラーに挿入できます。
挿入/スキャンされた値は、事前定義された識別子に従って検証され、一致するものが見つかると、その識別子のアクションを実行します。
挿入/スキャンされたデータを使用するには複数の方法があります。
トレーサビリティと生産監視(オペレーター ID、カスタム ID に保存、ID の保存)
作業管理(Pset、検証プログラム、バッチシーケンスを選択)
ユーザーアクセスコントロール (ログイン)。
挿入/スキャンされた値の使用方法を構成するには、ユーザーは識別子ルールを設定する必要があります。これらの規則は、まず、着信した識別ストリング(スキャナ入力)を確認しようとします。識別ストリングは、規則が確認した場合、システムに動作を命じます。
スキャナ
スキャナは、コントローラのUSBまたはシリアルポートに接続することができます。
USBスキャナは下記を備えています。
USB HIDインターフェース(キーボード)
米国英語キーボードインターフェース
MTF6000は、(キーボードとして)USB HIDおよびRS232を介して、スキャナを接続することができる場合もあります。上記のいずれのインターフェースを使用するすべてのタイプのスキャナが使用可能です。システムは512文字までのテキストストリングを受け入れます。
ステーションバーコードの作成
締め付けと測定のコントローラ間のトレーサビリティのために、ツール、トルク、コントローラIDなどに関する情報を含むステーションバーコードを生成することが可能です。このステーションバーコードは、検証プログラムが選択され、コントローラディスプレイに表示されている場合、MTF6000 内で自動的に生成されます。コントローラが品質オペレータの範囲外にある場合、ToolsTalk MT でステーションバーコードを手動で生成できます。このバーコードはIAM QA コントローラがバーコードをスキャンできるように、印刷してステーションの隣に配置することができます。締め付けと測定結果の間のトレーサビリティを得るために、ステーションバーコードの値は測定結果と一緒に保存されます。
識別子リストビューで、[バーコード]をクリックしてステーションバーコードを作成します。ToolsTalk MTではステーションバーコードが手動で入力されるため、任意の値を入力できます。つまり、MTF6000以外のコントローラで締め付けを行うことができ、IAM QAコントローラはいずれにしても情報を保存します。
識別子の追加
識別子を追加するには、以下のステップを実行します。
-
Menu (メニュー)バーのIdentifier (識別子)アイコンをクリックします。ワークスペースエリアが、現在のすべての識別子のリストを表示します。
-
追加ボタンをクリックします。Create (作成)ウィンドウが開く。
-
識別子番号と識別子名を入力します。
-
OKボタンをクリックします。
新しい識別子が選択番号の欄に追加され、リストがアップデートされます。
識別子の削除
識別子を削除するには、以下のステップを実行します。
-
各識別子を削除するには、ワークスペースエリアの左端の列のチェックボックスにマークを付けます。
-
DELETE (削除)ボタンをクリックします。
-
Confirm (確認)ウィンドウの削除を確定します。
選択された識別子が削除され、リストがアップデートされます。
識別子のコピー
識別子をコピーするには、以下のステップを実行します。
-
コピー元の識別子を右クリックします。
-
Copy (コピー)を選択します。
-
コピー先の識別子を右クリックします。
-
Paste (貼付)を選択します。
-
確認するには、Confirm (確認)ウィンドウのYes (はい)ボタンを押します。
全般的設定
|
パラメータ |
説明 |
|
名前 |
識別子名。 |
|
Identification string (識別ストリング) |
設定されたストリング。 Enter/Scan (入力/スキャン)ボタンを使用して、手作業でバーコードを入力します。 |
確認
確認設定を使用して、規則が着信した識別ストリングに適用されるか否かを確認します。規則が適用される場合には、コントローラが規則に付帯する動作を実行します。
所与のテキストに対応する、ストリング内の1~64文字のいずれも選択することが可能です。
例:
Match part (マッチ部分)-> 1-3, 9-10 (1~3、9~10)
1~3、9~10 (マッチストリング)->SNPDL
String 1 (ストリング1)-> SNP12345DL -> Match (マッチ)(ビット1~3はSNPであり、ビット9~10はDLである)
String 2 (ストリング2)-> SNPDL1234 -> No match (マッチなし)(ビット1~3 SNPであるが、ビット9~10は34である)
ファームウェアバージョン1.15.0以降では、全てを受け入れる検証を追加することができます。[長さ] を 0 に設定し、[部分一致] と [文字の一致] を空のままにします。同じコントローラで一つ以上の全てを受け入れる検証を作成しないでください。
パラメータ | 説明 |
Identification string length (識別ストリング長) | 識別ストリングの長さ。Enter/scan (入力/スキャン)ボタン、次にOKボタンがクリックされたとき、自動的に設定されます。 |
Match part (マッチ部分) | 識別ストリングの位置。 選択は独立したウィンドウでなされます。 |
Match string (マッチストリング) | マッチ部分に基づいてストリングにマッチする文字。 |
設定
ログインを除くすべての識別子動作で、各カスタムIDに100文字まで保存することが可能です。このストリングは、締付けからの結果データに付帯します。
ユーザがテキストを入力できる、4個のカスタムIDスロットがあります。各カスタムIDには、2個のフィールド、キーおよびフォーマットがあります。キー値は、識別子を設定する場合に入力できる静的テキストです。値フィールドは、スキャンが実行されたときに入力されます。値フォーマット設定は、どのようなデータがフィールドに入力されるかを決定し、選択するビットの数と順序を定義します。
パラメータ | 説明 |
Action type (動作タイプ) | IDの保存
VProgを選択 |
Keep until replaced(置き換えられるまで保管) |
|
IDの保存
Save ID (ID保存)動作は、バッチシーケンス内でのみ使用することができます。
この動作は、スキャンされたタグからのデータを、結果データとともに保存するのに使用されます。静的キーを追加することで、データをデータベースで検索することができます。4個までの保存ストリングをセットアップすることが可能です。スキャナ入力は100個のキー文字と100個の文字、合計200個までの文字を保存することができます。
パラメータ | 説明 |
Key 1-4 (キー1~4) | ユーザが定義した、スキャナデータとともに保存される静的テキスト。 |
Format 1-4 (フォーマット1~4) | カスタムIDに保存される着信ストリングの一部。 |
Save destination 1-4 (保存先1~4) | なし |
Select Pset (PSetの選択)
この動作は、選択されたソースがスキャナに設定されている場合にのみ、実行することができます。これはController settings (コントローラ設定) > Configuration (コンフィギュレーション) > Select source (ソースの選択)で設定されます。
この動作はPsetを選択します。
パラメータ | 説明 |
Pset | 使用可能なPsetから選択します。 |
Key 1-4 (キー1~4) | ユーザが定義した、スキャナデータとともに保存される静的テキスト。 |
Format 1-4 (フォーマット1~4) | カスタムIDに保存される着信ストリングの一部。 |
Save destination 1-4 (保存先1~4) | なし |
バッチシーケンスの選択
この動作は、選択されたソースがスキャナに設定されている場合にのみ、実行することができます。これはController settings (コントローラ設定) > Configuration (コンフィギュレーション) > Select source (ソースの選択)で設定されます。
この動作はバッチシーケンスを選択します。
パラメータ | 説明 |
バッチシーケンス | 使用できるバッチシーケンスから選択します。 |
バッチシーケンス再始動モード | バッチシーケンスが、それが終了したとき、新しいスキャンを待つか、自動的に始動するかを決定します。 |
Key 1-4 (キー1~4) | ユーザが定義した、スキャナデータとともに保存される静的テキスト。 |
Format 1-4 (フォーマット1~4) | カスタムIDに保存される着信ストリングの一部。 |
Save destination 1-4 (保存先1~4) | なし |
カスタムIDに保存
カスタムIDに保存はスキャン値を他の機能に依存することなく保存するのに使用できます。
パラメータ | 説明 |
Key 1-4 (キー1~4) | ユーザが定義した、スキャナデータとともに保存される静的テキスト。 |
Format 1-4 (フォーマット1~4) | カスタムIDに保存される着信ストリングの一部。 |
Save destination 1-4 (保存先1~4) | なし |
オペレーターID
オペレーターを測定結果にリンクするために、QAコントローラーに保存されます。
パラメータ | 説明 |
|---|---|
オペレーター ID 形式 | オペレーター ID として保存される着信文字列の一部。 |
[識別子] を開きます。
[追加] を押します。
識別子を開きます。
検証をセットアップします。
オペレーター ID 形式をセットアップします。
[識別子] に戻ります。
[オペレーター] を押します。
[追加] を押します。
キー (オペレーター ID 形式でセットアップした形式と一致する値) を入力します。
[名前] (オペレーターの名前) を入力します。
例
セットアップ識別子
パラメータ
値
識別文字列長
6
マッチ部分
{1-3}
マッチストリング
ABC
オペレーター ID 形式
{4-6}
オペレーターのセットアップ
オペレーター
パラメーター
値
1
キー
001
名称
Atlas
2
キー
002
名称
Copco
結果
バーコード
オペレーター
ABC001
Atlas
ABC002
Copco
ABC003
該当なし
ABC0010
該当なし
Select Vprog(VProgを選択)
この動作は、選択されたソースがスキャナに設定されている場合にのみ、実行することができます。これはController settings (コントローラ設定) > Configuration (コンフィギュレーション) > Select source (ソースの選択)で設定されます。
この操作により、検証プログラムが選択されます。
パラメータ | 説明 |
VProg reference(VProgリファレンス) | 使用可能なPsetから選択します。 |
Vprog restart mode(Vprog再起動モード) | 検証プログラムが新しいスキャンを待つか、完了時に自動的に開始するかを決定します。 |
Key 1-4 (キー1~4) | ユーザが定義した、スキャナデータとともに保存される静的テキスト。 |
Format 1-4 (フォーマット1~4) | カスタムIDに保存される着信ストリングの一部。 |
Save destination 1-4 (保存先1~4) | なし |
Login (ログイン)
この動作は、ユーザがユーザレベルでログインするのを可能にします。ユーザレベルは、I/O and Password settings (I/Oとパスワードの設定) > Password (パスワード) > Controller (コントローラ)で設定します。
ログイン中にコードをスキャンすると、ユーザは自動的にログアウトすることになります。
|
パラメータ |
説明 |
|
Level (レベル) |
レベル1~3を選択します。 |
ステーションバーコード
ステーションバーコードを手動で入力して、ツールとコントローラに関する情報を含むQRコードを作成し、スキャナを介してIAM QAコントローラに送信することができます。
パラメータ | 説明 |
|---|---|
Tool serial number(ツールシリアル番号) | 締め付けツールのシリアル番号。 |
コントローラシリアル | 締め付けコントローラのシリアル番号。 |
Controller ID (コントローラID) | 締め付けコントローラのコントローラID。 |
Station ID (ステーションID) | 締め付けコントローラのステーションID。 |
Line ID (ラインID) | 締め付けコントローラのラインID。 |
検証プログラムインスタンス番号 | 締め付けプログラム番号。 |
Tool type(ツールタイプ) | 締め付けを実行するツールのタイプ。 |
Calibration date(校正日) | ツールの校正日付。YYYY-MM-DD形式で表されます。 |
Target torque(目標トルク) | コントローラが締め付けるトルク量と測定対象。 |
Control limit(制御限界) | ターゲット/ツールからの最大許容偏差。CMKの計算に使用されます。 |
Verification size(検証サイズ) | ツールのテストのために実行する締め付け回数。 |
Minimum CMK(最小CMK) | 最小値CMKは検証OKを報告する必要があります(CMKが最小値を下回る場合、検証はNGを報告します)。パラメータが空または0に設定されている場合、検証は測定結果に従って結果を評価します。 |
Operator ID required(オペレーターIDが必要) |
|
保存
QRコードとすべてのパラメータを.jpgまたは.bmp形式の画像としてコンピュータに保存します。
Export (エクスポート)
パラメータをコンピュータ上の.xmlファイルに保存し、後でインポートして再編集することができます。
Import(インポート)
すべてのパラメータとその値を含む既存の.xmlファイルをインポートします。
Print(印刷)
締め付けステーションの隣に配置する準備ができている優れたフォーマットでQRコードとすべてのパラメータを印刷します。
Load parameters(パラメータの読み込み)
アクティブなコントローラのパラメータを適切なフィールドに読み込みます。ステーションバーコードにロードされるパラメータは次のとおりです。
Tool serial number(ツールシリアル番号)
コントローラのシリアル番号
Controller ID (コントローラID)
Station ID (ステーションID)
Line ID (ラインID)
Tool type(ツールタイプ)
構成

この機能は、ビットセレクターの動作、スタックライトの動作、トランスデューサー、およびボタンやLEDライトなどのツール機能を制御する可能性を提供します。
構成リスト
各ラインは、特定のツール/トランスデューサーファミリーまたはアクセサリの構成を表しています。列には次の情報が含まれます。
構成を選択するためのチェックボックス
名称、ユーザが定義する名前
最終変更
構成タイプ
ETD M
ETD M + PTS (押して開始)
ETD MC/MT
ETD MC/MT + PTS (押して開始)
QMC/QMT
MT TS/TH/TRA
ビットセレクタ
スタックライト
アクティブ
構成の追加
ツールまたはトランスデューサをこのコントローラに接続すると、コントローラは自動的にそのツールファミリまたはトランスデューサタイプの設定を追加します。
[追加] を選択して [構成] ウィンドウを開きます。
[Name] (名称) を入力し、トランスデューサータイプを選択したら、[OK] をクリックします。
新しい構成が追加され、リストがアップデートされます。
[追加] を選択して [構成] ウィンドウを開きます。
リストにあるアクセサリを選択します。
構成の削除
ひとつまたは複数の構成の削除:
削除したい構成のチェックボックスにチェックを入れ、それからDelete (削除)をクリックします。

実行中の構成は削除できません。
ダイアログボックスにあるConfirm (確定)ボタンをクリックします。
構成が削除され、リストが更新されます。
全般的設定
パラメータ | 説明 |
|---|---|
名前 | 構成リストに表示されているユーザーが定義した名前。 |
Configuration revision (コンフィギュレーションのリビジョン) | 構成のリビジョン。 |
作成済み | 構成の作成日。 |
変更 | 構成の最終変更日。 |
構成
構成のオプションはトランスデューサまたはツールのタイプにより異なります。ツールの場合、ツールトリガー、ライトおよび触覚フィードバックを構成できます。
新しいツール/トランスデューサーのタイプがコントローラーに接続されている場合、コントローラーは自動的に構成を作成します。
同じツール/トランスデューサーのタイプに対して複数の構成を作成することはできません。
パラメーター | 説明 |
|---|---|
構成タイプ | ツール/トランスデューサの構成 |
ツールファミリー | 現在のツールファミリの名前(ツール構成に対してのみ有効) |
ETD M / ETD M + PTS
パラメータ | 説明 |
|---|---|
Tool start trigger (ツール始動をトリガ) |
|
Tool loosening trigger (ツール緩めトリガ) |
|
Trigger Push-To-Start (押して開始をトリガ) |
|
ETD MC/MT / ETD MC/MT + PTS
パラメータ | 説明 |
|---|---|
Tool start trigger (ツール始動をトリガ) |
|
Trigger start function (開始機能をトリガ) | これを利用できるのは、Tool start trigger (ツール開始トリガ)がDisabled (無効)になっている時のみです。
|
Trigger start input function (開始入力機能をトリガ) | これを利用できるのは、Tool start function (ツール開始機能)がInput function (入力機能)になっている時のみです。 Digital I/O (デジタル I/O) (デジタルI/O)も参照してください |
Trigger Push-To-Start (押して開始をトリガ) |
|
Config single function (一回限定機能の構成) |
|
Config single input function (一回限定入力機能の構成) | これを利用できるのは、Config single function (一回限定機能の構成)がInput function (入力機能)になっている時のみです。 Digital I/O (デジタル I/O) (デジタルI/O)も参照してください |
Config single output function (一回限定出力機能の構成) | これを利用できるのは、Config single function (一回限定機能の構成)がToggle output function (トグル出力機能) または Pulse output function(パルス出力機能)になっている時のみです。 |
Config double function (ダブル機能の構成) |
|
Config double input function (ダブル入力機能の構成) | これを利用できるのは、Config double function (ダブル機能の構成)がInput function (入力機能)になっている時のみです。 Digital I/O (デジタル I/O) (デジタルI/O)も参照してください |
Config double output function (ダブル出力機能の構成) | これを利用できるのは、Config double function (ダブル機能の構成)がToggle output function (トグル出力機能) または Pulse output function(パルス出力機能)になっている時のみです。 |
Config hold function (ホールド機能の構成) | 構成はボタンを押してから約1秒後に有効になります。
|
Config hold input function (ホールド入力機能の構成) | これを利用できるのは、Config hold function (ホールド機能の構成)がInput function (入力機能)になっている時のみです。 Digital I/O (デジタル I/O) (デジタルI/O)も参照してください |
Config hold output function (ホールド出力機能の構成) | これを利用できるのは、Config hold function (ホールド機能の構成)がToggle output function (トグル出力機能) または Pulse output function(パルス出力機能)になっている時のみです。 |
Led intensity (LED強度) | 緑、青、赤のLEDに対する輝度を設定します。度数は1~5です。 |
Led timeout(LEDタイムアウト) | 緑、青、赤を有効化した後でLEDを何秒点灯状態にするかを設定します。タイムアウトは0~300まで設定でき、0は無制限です。 |
LED OK (OK状態を示すLED) |
|
Led NOK (OK状態でないことを示すLED) |
|
Led batch OK (バッチのOK状態を示すLED) |
|
Led batch OK color (バッチのOK状態を示すLED色) | これを利用できるのは、Led batch OK (バッチのOK状態を示すLED色)が enabled (有効)担っている時のみです。
|
Led guiding intensity (LED導灯強度) | 導灯用LEDの輝度を設定します。度数は1~5です。 |
Led guiding timeout(LED導灯タイムアウト) | 導灯を有効化した後でLEDを何秒点灯状態にするかを設定します。タイムアウトは0~300まで設定でき、0は無制限です。 |
Tactile on NOK (OKでないときの触覚) |
|
QMC/QMT
パラメータ | 説明 |
|---|---|
Led intensity (LED強度) | 緑、青、赤のLEDに対する輝度を設定します。度数は1~5です。 |
LEDタイムアウト | 緑、青、赤を有効化した後でLEDを何秒点灯状態にするかを設定します。タイムアウトは0~300まで設定でき、0は無制限です。 |
Led busy (LEDビジ―) |
|
LED OK (OK状態を示すLED) |
|
Led NOK (OK状態でないことを示すLED) |
|
Led batch OK (バッチのOK状態を示すLED) |
|
Led batch OK color (バッチのOK状態を示すLED色) | これを利用できるのは、Led batch OK (バッチのOK状態を示すLED色)が enabled (有効)担っている時のみです。
|
トランスデューサ
パラメータ | 説明 |
|---|---|
タイプ | トランスデューサのタイプ。たとえば、MT-TS |
名前 | トランスデューサ名。 |
最大トルク | トランスデューサーが測定できる最大トルク。 |
トルクしきい値 | しきい値に達した後に測定を開始/停止します。 |
トルク目標 | 測定の目的到達値。 |
制御限界 | 測定値が%で目標/ツールトルクからどれだけ逸脱できるか。CMKの計算にも使用されます。 |
検証サイズ | テストでの測定回数。 |
検証モード |
|
最小CMK | CMK が検証OKを報告できる最小許容値。最終CMKがこの値を下回っている場合、検証はNGを報告します。 |
ビットセレクタ
デジタル I/O ビットセレクターを使用する場合は、選択ソースをデジタル I/O に設定し、I/O 選択モードをビットセレクターに設定する必要があります。アクセサリ バスビットセレクターを使用する場合、選択ソースをアクセサリバスプロトコルに設定する必要があります。
パラメーター | 説明 |
|---|---|
センサー [1-8] | アクセサリ バスビットセレクターでのみ使用可能
|
ビット [1-8] 選択モード | センサー [1-8] が [無効] に設定されている場合、使用できるオプションは [なし] だけです。
|
ビット [1-8] Pset | ビットが選択されている場合、アクティブにするPsetを選択します。 ビット [1-8] 選択モードが [Pset の選択] に設定されている場合のみ使用可能です。 |
ビット [1-8] バッチシーケンス | ビットが選択されている場合、アクティブにするバッチシーケンスを選択します。 ビット [1-8] 選択モードが [バッチシーケンス の選択] に設定されている場合のみ使用可能です。 |
スタックライト
パラメーター | 説明 |
|---|---|
Stacklight (スタックライト) [1-5] 機能 | 対応するスタックライトに接続する出力機能を選択します。 |
Stacklight (スタックライト) [1-5] 信号モード | 信号のモードを選択します。 スタックライト [1-5] の 機能が無効に設定されている場合は使用できません。 オプションは、デジタル I/O 出力信号モードと同じです。
|
Stacklight [1-5] signal duration (スタックライト [1-5] 信号持続時間) | スタックライト [1-5] の 信号モードがDuration(持続時間)に設定されている場合のみ使用できます。 |
Stacklight [1-5] flashing (スタックライト [1-5] 点滅) | スタックライト [1-5] の 機能が無効に設定されている場合は使用できません。
|
Buzzer function (ブザー機能) | ブザーに接続する出力機能を選択します。 |
Buzzer signal mode (ブザー信号モード) | 信号のモードを選択します。 ブザー機能 が 無効 に設定されている場合は使用できません。 オプションは、デジタル I/O 出力信号モードと同じです。
|
Output signal duration (出力信号持続時間) | ブザー信号モードがDuration (持続時間) に設定されている場合のみ使用できます。 |
コンポーネント [A、B] |
|
Component [A,B] function (コンポーネント [A、B] 機能) | 対応するコンポーネント [A, B] に接続する入力機能を選択します。 コンポーネント [A, B] が片方向スイッチ、プッシュボタン、またはカラーボタンに設定されている場合にのみ使用できます。 |
Component [A,B] left function (コンポーネント [A, B] 左機能) | 対応するコンポーネント [A, B] に接続する入力機能を選択します。 コンポーネント [A, B] が 2 方向スイッチに設定されている場合にのみ使用できます。 |
Component [A,B] right function (コンポーネント [A、B] 右機能) | 対応するコンポーネント [A, B] に接続する入力機能を選択します。 コンポーネント [A, B] が 2 方向スイッチに設定されている場合にのみ使用できます。 |
Component [A,B] lamp function (コンポーネント [A, B] ランプ機能) | 対応するコンポーネント [A, B] に接続する入力機能を選択します。 コンポーネント [A, B] が カラーボタンまたはランプに設定されている場合にのみ使用できます。 |
Component [A,B] lamp signal mode (コンポーネント [A、B] ランプ信号モード) | 信号のモードを選択します。 コンポーネント [A, B] が カラーボタンまたはランプに設定されている場合にのみ使用できます。 |
Component [A,B] lamp signal duration (コンポーネント [A, B] ランプ信号持続時間) | コンポーネント [A, B] のランプ信号モードが持続時間に設定されている場合にのみ使用できます。 |
Component [A,B] lamp flashing (コンポーネント [A、B] ランプ点滅) | コンポーネント [A、B] が 無効に設定されている場合は使用できません。
|
Output [1-2] function (出力 [1-2] 機能) | 対応する出力 [1-2] 機能に接続する出力機能を選択します。 |
Output [1-2] signal mode (出力 [1-2] 信号モード) | 信号のモードを選択します。 出力 [1-2] 機能が無効に設定されている場合は使用できません。 オプションは、デジタル I/O 出力信号モードと同じです。
|
Stacklight [1-2] signal duration (出力 [1-5] 信号持続時間) | 出力 [1-2] 機能が持続時間に設定されている場合のみ使用できます。 |
Output [1-2] flashing (出力 [1-2] 点滅) | 出力 [1-2] 機能が無効に設定されている場合は使用できません。
|
Input [1-2] function (入力 [1-2] 機能) | 対応する入力 [1-2] 機能に接続する入力機能を選択します。 |
分析

分析はグラフの表示に使用されます。保存されたグラフをコントローラーや PC で分析することができます。締め付け/測定の進行中に、リアルタイムのトレースを表示することもできます。ただし、これは、コントローラーが USB 経由で接続されている場合にのみ使用できます。
保存された各グラフにおけるサンプルレートおよびサンプルポイントの数は締め付け時間の長さに応じて異なります。
サンプルレート * 所要時間 = サンプルポイント
Data sample rate (Hz)(データサンプルレート(Hz)) | Max Duration(最大期間) |
|---|---|
7500 | 0.133333333 |
3750 | 0.266666667 |
1875 | 0.533333333 |
937.5 | 1.066666667 |
468.75 | 2.133333333 |
例えば、締め付けに 0.52 秒かかる場合、サンプルレートは 1875 Hz となります。その結果、1875 * 0.52 = 975 個のサンプルポイントとなります。
GUIオブジェクト | 対処 |
停止 | 分析にリアルタイム追跡の取得/受信を停止させます。 |
開始 | 分析を開始します。各締め付けで新しいグラフを開始します。 |
Value table (値表) | 表にグラフを表示します。 |
クリア | グラフを消去します。 |
開く | 以前保存したグラフを開きます。 |
保存 | 表示されたグラフを「.dia」ファイルとして保存します。 |
Export (エクスポート) | 結果を「.jpg」または「.bmp」ファイルに保存します。 |
設定 | 分析機能を変更します。3つのタブで選択されます。
|
テスト | ToolsTalk MTからツールを実行するのを可能にするウィンドウを開きます。 |
パス | 作業フォルダへのパス。選択されたフォルダの「.dia」または「.mtg」ファイルが表示されます。 |
Show multiple traces (複数の追跡の表示) | 複数の追跡を表示します。8つまでのグラフをプリントします。 |
リフレッシュ | 押すと、作業フォルダ/パスがアップデートされます。 |
.dia- and .mtg-files (「.dia」および「.mtg」ファイル) | 選択された作業フォルダの「.dia」および「.mtg」ファイルが表示されます。 |
分析メニューのグラフのナビゲーション
|
アクション |
説明 |
|
Zoom in (ズームイン) |
マウスの左ボタンをホールドして、対角線上に右にドラッグします。 |
|
ズームアウト (ズームアウト) |
マウスの左ボタンをホールドして、対角線上に左にドラッグします。 |
|
Move (移動) |
マウスの右ボタンをホールドして、マウスを動かします。 |
|
Copy chart (チャートのコピー) |
チャートをコピーするには、マウスの右ボタンをクリックして、Copy chart (チャートのコピー)を選択します |
|
Add comment (コメントを付ける) |
グラフ上でマウスの右ボタンをクリックし、(そのグラフに)コメントを付けます。 |
|
Delete (削除) |
グラフ上でマウスの右ボタンをクリックして、Delete (削除)を選択し、チャートから取り除きます。 |
設定
ToolsTalk MT分析の設定。
全般的設定
|
パラメータ |
説明 |
|
パス |
記録は指定されたフォルダに保管されます。ファイルは、インデックス付きで命名されます。 ユーザは、選択したパスへの書込許可を持っていることが必要です。 |
|
Automatic store (自動保管) |
ファイルを指定されたフォルダに自動的に保存することを可能にします。 |
|
Show legend (説明文) |
ダイヤグラムから説明文を表示する/隠す。 |
|
Step color (ステップカラー) |
締付プログラムの各ステップには、それぞれ異なる色が付きます。無効になっていると、各グラフに同じ色が付きます。 |
Torque trigger (トルクトリガ)
Torque trigger (トルクトリガ)は、記録のアクティブ化および非アクティブ化を制御するために使用します。
|
パラメータ |
説明 |
|
Torque (トルク) |
リアルタイム追跡は、トルクがこの値を超えている間、記録されます。 |
|
Start delay (始動遅延) |
遅延時間は、0~50秒の範囲内で調整することができます。リアルタイム追跡は、実行時間がこの値を超えている間、記録されます。始動遅延とトルクトリガの両方を使用する場合、両方の限度を超えるまで、リアルタイム追跡は記録を開始しません。 |
Chart settings (チャート設定)
|
パラメータ |
説明 |
|
Diagram type (ダイヤグラムタイプ) |
トルク / 時間 は、時間に対するトルクを表示します。 |
|
Show torque gradient trace (トルク勾配追跡の表示) |
トルク勾配追跡を表示します。 |
結果

GUIオブジェクト | アクション |
First (最初) | 最新の100個の結果/イベントを含む最初のページを開きます。 |
Previous(前へ) | 直前のページを開きます。 |
Next (次へ) | 次のページを開きます。 |
Last (最後) | 最も古い100個以下の結果/イベントを含む最後のページを開きます。 |
Refresh(リフレッシュ) | 結果/イベントリストをアップデートします。 |
Search(検索) | 結果の検索を可能にします。(IAM QAライセンスでのみ利用可能) |
>> | 次のカウント結果を検索します。(IAM QAライセンスでのみ利用可能) |
Export (エクスポート) | 結果のエクスポートを可能にします。(IAM QAライセンスでのみ利用可能) |
Auto update (自動アップデート) | 新しい結果が保管されたとき、リストは自動的にアップデートされます。 |
結果
結果ウィンドウには、コントローラに保存されているすべての締付け結果または測定結果が表示されます。
結果ウィンドウを右クリックすると、表に表示する列を選択します。
結果の選択
締付けの結果ウィンドウの左上隅にある表の1つの締付けを選択します。
選択された締付のトルク/角度グラフおよびデータが表示されます。
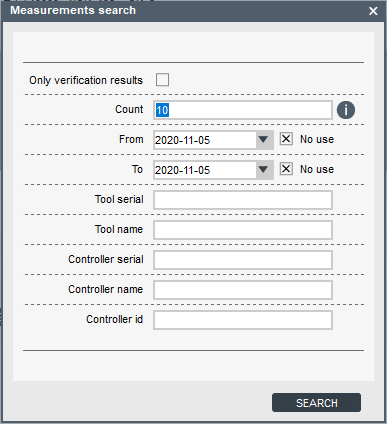
結果の検索
[結果]ペインで、[検索]ボタンをクリックします。[測定値の検索]ダイアログが表示されます。
パラメータ
説明
検証結果のみ
検証結果のみを選択し、通常の測定値を無視します。
カウント
見つかった結果の数(1〜100)。
送信元 - 送信先
このパラメーターは、結果が生成された日付を参照します。これで、ユーザーは検索で日付を無視できます。
ツールのシリアル番号
「ToolSerial」シリアルを使用してツールで行われた検証を検索します。
Tool name (ツール名)
「ToolName」という名前のツールで行われた検証を検索します。
コントローラシリアル
「ControllerSerial」シリアルのコントローラーで行われた検証を検索します。
コントローラ名
「ControllerName」という名前のコントローラーで行われた検証を検索します。
コントローラ ID
「ControllerId」IDのコントローラーで行われた検証を検索します。
ボックスに検索に関連する情報を挿入します。
[検索]をクリックします。
結果のエクスポート
結果または結果のセットをエクスポートするには、結果ペインで特定の結果または結果のセットを選択し、[エクスポート]ボタンをクリックするか、右クリックします。

次のオプションが利用可能です。
データベース全体をExcelにエクスポート:完全な測定結果データベースを、MS Excelで簡単に開くことができる .csv ファイルにエクスポートします。
選択したアイテムをExcelにエクスポート:[測定結果]ペインで以前に選択した測定結果のセットのみを .csv ファイルにエクスポートします。
選択した検証PDFの作成:特定の検証結果を .pdf 形式のレポートで作成します。複数の検証結果を同時に選択すると、それぞれについて .pdf レポートが作成されます。
選択した測定結果が検証結果でない場合は、少なくとも 3 つの無負荷回転測定を選択する必要があります。レポートを作成するときに、無負荷回転測定と検証結果を混在させることはできません。
複数の測定結果を選択すると、制限のないレポートが作成され、各測定値がグラフに表示されます。
測定レポートの作成
[結果]ペインで、特定の結果または結果のセットを選択し、[エクスポート]ボタンをクリックします。
[選択した検証 pdf を作成] オプションを選択します。[検証レポート情報] ダイアログが表示されます。

パラメータ
説明
クライアント情報
顧客に関連する情報。
顧客行1~4
この情報は、レポートの右上コーナーに表示されます。
テストされたデバイスID
この情報はツール情報の下に表示され、顧客にツール独自のIDがある場合は、ここに入力できます。
サービスセンター情報
サービスセンターに関連する情報。
サービス行1~4
このセクションは、レポートフッターの中央に表示されます。これらのフィールドにはメモリがあるため、情報を入力する必要があるのは1回のみです。
ボックスに関連する情報を挿入します。
[生成] をクリックして、レポートを取得します。
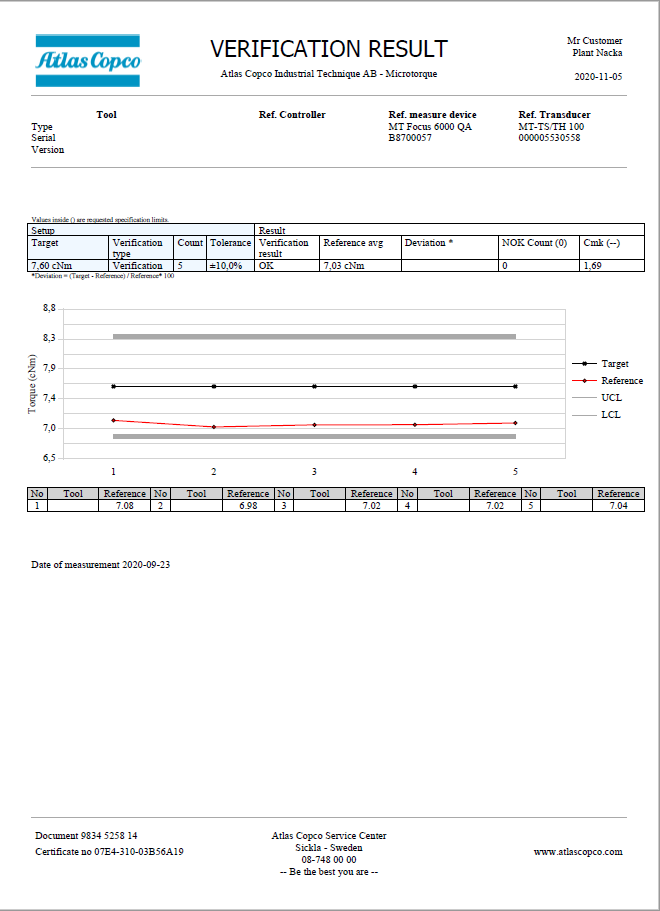
検証レポートの例 
FreeRunレポートの例
Step results (ステップの結果)
step result (ステップの結果)ウィンドウは、直近の締付け/緩めのステップトルクおよび角度の値を表示します。
イベント
イベントは、コントローラーで発生したエラーまたは情報メッセージのいずれかです。これらは Excel ファイルにエクスポートして保存できます。
events (イベント)ウィンドウは、直近の512の結果のリストを表示します。
イベントに関する情報が表示されているウィンドウを開くには、そのイベントをダブルクリックします。
ツールの設定

トルクチェック
トルクチェックを行うことで、ツールのテストと検証の時間となったことをユーザーに知らせる間隔を設定することができます。間隔は、サイクル数または時間のいずれかでトリガーできます。トルクチェックパラメータを使用すると、ツールの正常な検証結果が得られるまで、それ以上のアクションを実行できないようにツールをロックすることもできます。
検証結果は、MTF6000 IAM QA ライセンスとともに USB Sync を介して検証が実行された場合にのみ表示されます。
トランスデューサー設定

コントローラの設定

コントローラをToolsNetに接続する
静的モード
イーサネットを介して、コントローラを工場ネットワークに接続します。
Controller settings (コントローラ設定) Configuration (コンフィギュレーション) > Network (ネットワーク)において、Network mode (ネットワークモード)をStatic (静的)に設定します。
コントローラのIPアドレス、サブネットマスク、ゲートウェイを設定します。
ToolsNetをEnable (有効)にします。
ToolsNetサーバのIPアドレスを設定します。
ToolsNetポートを設定します。6700は、すべてのMTデバイスにおいて標準ポートです。
コントローラが時間をToolsNetに同期させるか否かを選択します。
DHCPモード
イーサネットを介して、コントローラを工場ネットワークに接続します。
Controller settings (コントローラ設定) > Configuration (コンフィギュレーション) > Network (ネットワーク)において、Network mode (ネットワークモード)をDHCPに設定します。
ToolsNetをEnable (有効)にします。
ToolsNetサーバのIPアドレスを設定します。
ToolsNetポートを設定します。6700は、すべてのMTデバイスにおいて標準ポートです。
コントローラが時間をToolsNetに同期させるか否かを選択します。
一般設定
GUIオブジェクト | 説明 |
Update firmware (ファームウェアの更新) | 接続されたコントローラのファームウェアを更新します。 更新するには、コントローラのファームウェアはバージョン 1.4.1 以上でなければなりません。 |
Set date and time (日時の設定) | 日時を設定します。 |
Show vacuum (真空を表示) | 真空圧力値をライブで表示するウィンドウを開きます |
Capture controller screen (コントローラー画面をキャプチャ) | その正確な瞬間にコントローラー画面に表示されるものが印刷されたレプリカでウィンドウを開きます。例えば、オペレーター指示を作成するために使用できます |
パラメーター | 説明 |
校正日 | 最終較正の日付。 |
Controller name (コントローラ名) | コントローラのユーザ定義名。 |
Controller ID (コントローラID) | コントローラのユーザ定義識別番号。 |
Station name (ステーション名) | ユーザ定義ステーション名。 |
Station ID (ステーションID) | ユーザ定義ステーション識別番号。 |
Line name (ライン名) | ユーザ定義ライン名。 |
Line ID (ラインID) | ユーザ定義ライン識別番号。 |
Controller language (コントローラ言語) |
|
Torque unit (トルクの単位) | コントローラに表示されるトルクの単位。
|
温度単位 | コントローラに表示される温度の単位。 |
構成
パラメーター | 説明 |
Beep on OK (OKのときにビープ音) | 有効に設定すると、締め付け OK 時に、コントローラがビープ音を発します。 |
Beep on NOK (NGのときにビープ音) | 有効に設定すると、締め付け NOK 時に、コントローラがビープ音を発します。 |
Beep on Batch complete (バッチ完了時にビープ音) | 有効に設定すると、バッチが終了したときに、コントローラがビープ音を発します。 |
Beep on Batch sequence complete (バッチシーケンス完了時にビープ音) | 有効に設定すると、バッチシーケンスが終了したときに、コントローラがビープ音を発します。 |
Beep on Verification Complete (検証完了時にビープ音) | QA Parameter (QA パラメーター) 有効に設定すると、検証がが終了したときに、コントローラがビープ音を発します。 |
ソースの選択 | このパラメータは、Psetとバッチシーケンスをどのように選択し、作動させるかを制御します。
|
Startup mode (起動モード) | 起動時に、Psetまたはバッチシーケンスを選択します。
|
Pset number (Pset 番号) | 起動モードで Pset が選択されている場合、Pset 番号を選択します。 |
Batch sequence number (バッチシーケンス番号) | 起動モードでバッチシーケンスが選択されている場合、バッチシーケンス番号を選択します。 |
Startup view (起動時のビュー) | 起動時に、コントローラのどのビューが開くかを定義します。 |
Backlight activate on tightening/measurement (締め付け/測定時にバックライトが点灯する) | [はい] に設定すると、締め付け/測定中にコントローラ画面が点灯します。 |
Lock on error (エラー時にロックする) | このパラメータは、締め付けエラー時のイベントを有効にします。このイベントは、新しい締め付けの開始前に確認することが必要です。これは、ロボットがシステムを動かしている場合などに、システムを停止するのに使用することができます。締め付けの失敗のあと、オペレータが作業を続けられないようにするために、パスワード規則を有効にする必要があります。 |
Ack on Batch sequence error (バッチシーケンスエラーの確認) | バッチシーケンスエラーイベントの物理的な確認をクリアする必要があるかどうかを決定します。 |
Save graphs (グラフの保存) | ライセンス機能 すべての締め付けの結果がグラフを保存するか、失敗した締め付けの結果だけがグラフを保存するか、またはすべての締め付けの結果がグラフを保存しないかを決定します。 |
Auto start tightening (締め付けの自動始動) | 任意の間隔でアクティブ締め付けを自動的に開始します。 |
Standby (スタンバイ) | スタンバイを有効にすると、コントローラは設定された時間後にスタンバイモードに設定されます。コントローラがスタンバイモードからウェイクアップする場合、ツールの初期化は必要はありません。 次からの入力があると、コントローラのスタンバイモードが解除されます。
|
自動シャットダウン | 有効にすると、自動シャットダウンパラメーターを設定できます。ユーザーは、コントローラが非アクティブの場合にバッテリをオフにするタイミングのタイマーを設定できます。 |
Tool init. confirmation (ツール初期化の確認) | ツールが初期化を開始する前に、オペレータ/ユーザがOKを押すことを必要とするかを定義します。ツールの初期化は、システムの起動時およびツールが接続されたときに、実行されます。 |
Tool rehit enabled (ツールリヒット有効) | リヒットは、すでに締め付けられているネジを締め付けることです。この設定が有効の場合、システムがリヒットを検出すると、締め付けエラーを発行します。 |
Current Monitoring (電流モニタリング) | このパラメータは、トランスデューサーからのトルクを使用電流と比較します。トランスデューサー内蔵ツールを備えたMT Focus 6000でのみ動作します。EDT MT/QMTシリーズ。
|
警告間隔 | 直近のトルクチェックから一定時間が経過すると、トルクチェックを行う時間になったことを知らせる警告がコントローラによってトリガされます。このイベントはクリア可能です。 |
警告サイクル | 直近のトルクチェックの後、ツールが設定サイクル数に達すると、トルクチェックを行う時間であることを知らせる警告がコントローラによってトリガされます。このイベントはクリア可能です。 |
必要な間隔 | 直近のトルクチェックから一定時間が経過すると、トルクチェックを行う時間になったことを知らせるエラーがコントローラによってトリガされます。OK トルクチェックが実行されるまで、ツールはロックされます。 |
必要なサイクル | 直近のトルクチェックの後、ツールが設定サイクル数に達すると、トルクチェックを行う時間であることを知らせるエラーがコントローラによってトリガされます。OK トルクチェックが実行されるまで、ツールはロックされます。 |
Network mode (ネットワークモード) | ライセンス機能
|
IP アドレス | コントローラの静的IPアドレスを入力します。 ネットワークモードが静的に設定されている場合のみ使用可能です。 |
サブネットマスク | コントローラの静的サブネットマスクアドレスを入力します。 ネットワークモードが静的に設定されている場合のみ使用可能です。 |
ゲートウェイ | コントローラの静的ゲートウェイアドレスを入力します。 ネットワークモードが静的に設定されている場合のみ使用可能です。 |
DNS 1 | DNS の静的 IP を入力します。 |
ToolsNet | ライセンス機能 ToolsNetバージョン8.4以降を備える、Enable (有効) / disable (無効)接続。 |
ToolsNet IP address (アドレス) | ライセンス機能 ToolsNetサーバのIPアドレス。 |
ToolsNet port (ポート) | ライセンス機能 ToolsNetサーバのポート6700は、すべてのMTデバイスにおいて標準ポートです。 |
ToolsNet sync. time (同期時間) | ライセンス機能 コントローラが時間をToolsNetに同期させるか否かを選択します。 |
オープンプロトコル |
|
OP Torque unit (OP トルクの単位) | コントローラがOPを介してすべてのトルクパラメータを送信するトルク単位を選択します。 オープンプロトコルが有効に設定されている場合にのみ使用可能です。
|
OP Temperature unit (OP 温度の単位) | コントローラがOPを介してすべての温度パラメータを送信する温度単位を選択します。 オープンプロトコルが有効に設定されている場合にのみ使用可能です。
|
Battery adapter enabled (バッテリーアダプター有効) | はい: 他のRS232パラメーターをすべて無効にし、バッテリとの互換性を有効にします。 いいえ: バッテリとの互換性を無効にし、他の RS232 パラメーター (Open Protocol や Scanner など) を有効にします。 |
RS232 mode (モード) | [バッテリーアダプタ有効] が [いいえ] に設定されている場合にのみ使用できます。
|
Baudrate (ボーレート) | RS-232のデータ伝送速度 |
Clear DB on USB export (DBまたはUSBエクスポートを消去する) |
|
オペレーターIDタイムアウトが有効 |
|
Operator ID timeout (オペレーター ID タイムアウト) | オペレーターIDは、コントローラーが一定時間アイドル状態になるとクリアされます。 |
Measurement trigger (測定トリガー) | ライセンス機能
|
Ack on Verification complete (検証完了時に確認) | ライセンス機能 有効にすると、ユーザーは続行する前に検証結果のポップアップを確認する必要があります。無効にすると、新しい測定が開始されたときに、コントローラは自動的にポップアップを閉じます。 |
Zero offset on OK (OK 時のゼロオフセット) | ライセンス機能 はいの場合、ユーザーはコントローラーの [OK] ボタンを押すことで、トランスデューサーのゼロオフセットを設定できます。 |
QA Custom field count (QA カスタムフィールド数) | ライセンス機能 IAM QA コントローラーのカスタムビューの外観について説明します。ビューに表示するフィールド数。 |
QA データフィールド 1-4 | ライセンス機能 選択したフィールドに表示する情報を説明します。可能な値:
|
システム情報
パラメーター | 説明 |
ソフトウェアバージョン |
|
Software date (ソフトウェアの日付) | ソフトウェアのビルド日付。 |
MAC address (MACアドレス) | IAMのMACアドレス。 |
Serial number (シリアル番号) | コントローラのシリアル番号。 |
Licence ID (ライセンスID) | ライセンスコード。 |
License level (ライセンスレベル) | ライセンスレベル。 |
Date and time (日時) | 日時を設定します。 |
システム診断
パラメーター | 説明 |
Current sensor zero (電流センサーゼロ) |
|
Torque sensor zero (トルクセンサーゼロ) |
|
Vacuum pressure (真空圧力) |
ネットワーク
パラメーター | 説明 |
Link status (リンクステータス) | 現在の接続のステータス。 |
DHCP | 設定されたDHCPのアドレス。 |
IP address (IP アドレス) | コントローラIPアドレス。 |
Subnet mask (サブネットマスク) | サブネットマスク。 |
Gateway (ゲートウェイ) | ゲートウェイの IP。 |
デジタルI/Oとパスワードの設定

Digital I/O (デジタル I/O)
信号をコントローラーに入力します。
パラメーター | 説明 |
I/O select mode (I/O選択モード) | I / O選択ピンがPset、バッチシーケンス、またはビットセレクター構成をアクティブにするかどうかを定義します。 |
Digital in(デジタル入力)
信号をコントローラーに入力します。
パラメーター | 説明 |
Disabled (無効) | 信号が無効になります。 |
締め付けを開始 | 締付けを開始します。ポジティブフランク(移行0->1)で開始します。 |
Start tightening (hold) (締付開始 (ホールド)) | 締付けを開始します。ポジティブフランク(移行0->1)で開始します。締付中に信号が低になった場合、キャンセルされます。 |
Start loosening(緩め操作を開始) | 緩めを開始します。ポジティブフランク(移行0->1)で開始します。 |
Start loosening (hold) (緩め開始 (ホールド)) | 緩めを開始します。ポジティブフランク(移行0->1)で開始します。緩め中に信号が低になった場合、キャンセルされます。 |
Stop operation (動作停止) | 進行中のいかなる締付け/緩めも停止します。 |
リセット | この信号は、進行中のいかなる締付けも停止します。締付けがアクティブでない場合、スクリーンから直近の締付データを消去します。 |
Disable tool(ツールを無効にする) | ツールを無効モードに設定すると、新しい締付けも緩めも開始できません。 |
Initialize tool (ツールの初期化) | ツールに初期自己較正を実行させます。とりわけ内部摩擦を測定します。 |
Clear event (イベントの消去) | 非ブロック化コントローライベントを消去します。これはコントローラのOKボタンを押して、エラー/イベントを確認するのと同じです。 |
Clear all events (すべてのイベントの消去) | すべてのアクティブな(非ブロック化)コントローライベントを消去します。 |
Select bit 0-9 (ビット0~7の選択) | 選択ソースがデジタルI/Oに設定されている場合、Pset、バッチシーケンス、またはビットセレクター構成を選択するために使用されます。 |
Reset Batch sequence (バッチシーケンスのリセット) | バッチシーケンスを再び開始します。 |
Increment Batch (バッチのインクリメント) | バッチの1つの締付けをスキップします。 |
Decrement Batch (バッチのデクリメント) | バッチの1つの締付けを再び実行します。 |
Reset Batch (バッチのリセット) | バッチを再び開始します。 |
Batch sequence DI1-12 (バッチシーケンスDO1~8) | バッチシーケンス入力信号。これらの信号は、バッチシーケンス入力イベントを制御します。 |
スタンバイ | コントローラをスタンバイ(待機)モードに設定し、消費電力を抑えます。 |
再起動 | コントローラソフトウェアを再起動します。 |
Increment Batch sequence (バッチシーケンスのインクリメント) | バッチシーケンスの1つのステップをスキップします。 |
Enable vacuum (真空有効化) | 真空ポンプを有効化します。 |
Enable clean (クリーニング有効化) | チューブのクリーニング用リバースエアフロー |
Wake up (起動) | コントローラをスタンバイモードから起動します。 |
Tool guiding light (ツール導灯) | LED 導灯をオンにします。 |
Tool status red(ツールのステータス:赤) | LED赤色をオンにします。 |
Tool status green(ツールのステータス:緑) | LED緑色をオンにします。 |
Tool status blue(ツールのステータス:青) | LED青色をオンにします。 |
Tool status white(ツールのステータス:白) | LED白色をオンにします。 |
External monitored 1-8(外部監視 1~10) | 特定の機能に接続させずに入力を操作する際に使用します。(オープンプロトコルなどの外部プロトコルに使用可能です。) |
Start measurement (測定開始) | (ライセンス機能) |
Stop measurement(測定停止) | (ライセンス機能) |
Start measurement hold (測定開始ホールド) | (ライセンス機能) |
Set transducer zero(トランスデューサのゼロ設定) | (ライセンス機能) |
Reset verification(検証のリセット) | 検証をリセットします。 |
Digital out(デジタル出力)
コントローラの出力信号。
パラメーター | 説明 |
Disabled (無効) | 信号が無効になります。 |
準備完了 | コントローラが締付けを開始する準備が完了しています。 |
Busy(ビジー) | 締付けまたは緩めプロセスのいずれかでツールが動作していると、出力がアクティブになります。 |
エラー | エラーがアクティブです。 |
Tightening OK(締め付け NG) | 締付けプログラムが正常に終了しました。シーケンスの処理中、信号は非アクティブです。 |
Tightening NOK(締め付け NG) | 締付けプログラムは正常に終了しませんでした。シーケンスの処理中、信号は非アクティブです。 |
Batch complete (バッチ終了) | バッチステップが終了しました。 |
Active event (アクティブイベント) | イベントがアクティブです。 |
Blocking event (ブロック化イベント) | イベントは、分解されるまで動作を妨げます。 |
Clearable event (消去可能イベント) | イベントが確認されるか否かを設定します。 |
Initializing tool (ツールの初期化) | 初期ツール自己較正が進行中であることを示します。 |
Tool disabled(ツール使用不可) | ツールが無効であるか否かを示します。 |
Vacuum pump (真空ポンプ) | 真空ポンプがアクティブか否かを示します。 |
Start signal (始動信号) | ツールの始動レバーが押されている間、出力はアクティブです。 |
Loosening signal (緩め信号) | ツールのリバースレバーが押されている間、出力はアクティブです。 |
Push to start signal (「押して始動」信号) | ツールビットスイッチが押されている間、出力はアクティブです。 |
Batch sequence DO1-8 (バッチシーケンスDO1~8) | バッチシーケンス出力信号。これらの信号は、バッチシーケンス出力イベントを制御します。 |
Batch sequence complete (バッチ シーケンス完了) | バッチシーケンスが正常に終了しました。 |
Batch sequence error (バッチシーケンスエラー) | バッチシーケンスエラーがトリガされたか否かを示します。 |
Batch error (バッチエラー) | バッチが失敗し中止されたことを示します。 |
Standby active (スタンバイ有効) | コントローラがスタンバイモードであることを示します。 |
Screw not aligned(ネジが位置合わせされていない) | ネジの位置合わせされていない限界を超えています。ネジがピックアップされているもののビットと位置合わせされていません。 |
Screw aligned(ネジが位置合わせされている) | ネジの位置合わせされている限界を超えています。ネジがピックアップされておりビットと位置合わせされています。 |
External monitored 1-10(外部監視 1~10) | 特定の機能に接続させずに出力を操作する際に使用します。(オープンプロトコルなどの外部プロトコルに使用可能です。) |
Vacuum clean (真空クリーニング有効化) | 真空クリーニング機能が有効 |
真空ポンプ接続済み | 真空ポンプ MT (8432 0854 00) が接続されているか確認します。この信号を機能させるには MTF6000 が変更 C 版以降である必要があります。 |
測定OK | (ライセンス機能) |
測定NG | (ライセンス機能) |
検証完了 | 検証が完了すると、信号が高になります。 |
検証がアクティブ | 検証がアクティブな場合、信号は高になります。 |
サービスが必要 | ツールまたはトランスデューサは、サービスを受ける状態となっています。 |
バッテリ接続済み | バッテリーはコントローラに接続されています。 |
バッテリー低 | バッテリ電源が 20% を下回っています。 |
検証OK | 検証に成功しました。 |
検証NG | 検証に失敗しました。 |
ビット0-3のロックを解除 | バッチシーケンスイベントステップのビットセレクターで選択するビットを示します。(計算バイナリ) |
トルクチェック必須 | トルクチェックが必要な場合を示します。 |
時計回りに回転 | ツールが時計回りに回っている (締め付けている) と、信号が強くなります。 |
反時計回りに回転 | ツールが反時計回りに回っている (緩めている) と、信号が強くなります。 |
出力信号モード
トラッキング - 変更時に反応します。
次の締め付けまで - 次の締付けが開始するまでアクティブになります。
持続時間 - 設定された時間の間、アクティブです。
パスワード
これはライセンス機能です。IAM QAでは利用できません。
フレキシブルパスワードシステムは、オペレータがアクセスする対象をどのようにも設定することができます。技術者とラインマネージャは、バスワードを使用して、またはバーコードやICタグなど、スキャナを使用してログインして、システムにアクセスすることができます。
パスワードが設定されていない場合、No password (パスワードなし)設定はすべての機能への完全なアクセスを可能にします。
パスワードコンフィギュレーションがIAM MTから取り除かれた場合、コントローラは、すべてのレベルが完全に制限されている新しいパスワードファイルを生成します。
コントローラにログイン/ログアウトする方法は、複数存在します。
パッドロックシンボルが表示されているときに、PINコードを入力してログインする。
バーコードまたはICタグをスキャンする。タグを1回スキャンするとログインし、もう1回スキャンするとログアウトします。
OKボタンを押す。
PIN コード
何らかの機能が制限されている場合、パッドロックシンボルが表示されます。その機能を解除するには、PINコードを入力します。
スキャナログイン
バーコードまたはICタグでログインするには、識別子規則をセットアップすることが必要です。この識別子規則には、ログインするための動作を設定することができます。アクセスのレベルを入力します。
コードの1つのスキャンがログインし、再びスキャンし、パスワードレベルがログアウトします。
パスワード設定
全般的設定
パラメータ | 説明 |
Automatic logout time (自動ログアウト時間) | ユーザがコントローラから自動的にログアウトするまでの時間。 |
コントローラ
Controller (コントローラ)表により、アクセス権を設定することができます。
4桁のPINコードが、ユーザ番号の下にあるボックスで設定されます。パスワードの真上にあるPin enabled (PIN有効化)のチェックボックスのチェックを外すことで、あるレベルに対しパスワードを無効化することも可能です。
パラメータ | 説明 |
Menu access (メニューアクセス) | コントローラのシステムメニューにアクセスします。 |
Change view (ビューの変更) | 1つの結果ビューから別の結果ビューに切り替えます。 |
PSetの選択 | コントローラからPsetを選択します。 |
Select Batch sequence (バッチシーケンスの選択) | コントローラからバッチシーケンスを選択します。 |
Reset tightening error (締付エラーのリセット) | 締付エラーを確認します。 |
Reset Batch sequence error (バッチシーケンスエラーのリセット) | バッチシーケンスエラーを確認します。 |
Abort Batch sequence (バッチシーケンスの異常終了) | バッチシーケンスをリセットします。 |
Increment/decrement Batch sequence (バッチシーケンスのインクリメント/デクリメント) | バッチシーケンスステップカウンタをインクリメントまたはデクリメントします。 |
Increment/decrement batch (バッチのインクリメント/デクリメント) | バッチカウンタをインクリメント/デクリメントします。 |
クイックプログラミング | クイック設定にアクセスします。 |
ソースの選択 | ソースの選択を変更します。 |
ツール管理 | ツールを開始/停止させます。。 |
Import settings (設定のインポート) | USBフラッシュメモリを介して、コントローラ設定(コントローラパラメータ、Pset、バッチシーケンス、識別子またはI/O設定)をインポートします。 |
ソフトウェアのインポート | ソフトウェアをアップデートします。 |
Export settings (ソフトウェアのエクスポート) | コントローラ設定(コントローラパラメータ、Pset、バッチシーケンス、識別子またはI/O設定)をUSBフラッシュメモリにエクスポートします。 |
Export results (エクスポートの結果) | 結果を、CSVファイルとしてUSBフラッシュメモリにエクスポートします。 |
Export graphs (グラフのエクスポート) | グラフをUSBフラッシュドライブにエクスポートします。 |
すべてをエクスポート | すべてをUSBフラッシュドライブにエクスポートします。 |
ソフトウェアのエクスポート | ソフトウェアをUSBフラッシュドライブにエクスポートします。 |
イベントのエクスポート | イベントをUSBフラッシュドライブにエクスポートします。 |
コントローラ情報 | コントローラ情報メニューへのアクセス。 |
ツール情報 | ツール情報メニューへのアクセス。 |
バッテリー情報 | バッテリー情報メニューへのアクセス。 |
接続情報 | 接続メニューへのアクセス。 |
IP configuration (IPコンフィギュレーション) | IPコンフィギュレーションメニューへのアクセス。 |
ToolsNet 構成 | ToolsNetコンフィギュレーションメニューへのアクセス。 |
デジタル I/O | デジタルI/O情報メニューへのアクセス。 |
フィールドバス

この機能により、フィールドバスキャリアMTとともに、PLCなどの外部ソースからコントローラを制御することができます。
フィールドバスキャリアMTは、内部のAnyBusモジュールがサポートされている場合にのみ機能します。アトラスコプコ固有のプロバイダーIDでコード化されたモジュールのみがサポートされています。これらはアトラスコプコでのみ購入できます。モジュールをアトラスコプコから購入した場合は、正しいプロバイダーIDがあります。現在、以下のモジュールのみがサポートされています。
MTF6000ファームウェア1.12以降のAnybus M40 PROFINET モジュール 8432085320 (ファームウェアv1.40.01)
MTF6000ファームウェア1.16以降のAnybus M40 EtherCATモジュール 8432085310(ファームウェアv2.15.1)
MTF6000ファームウェア1.16以降のAnybus M40 EtherNet / IPモジュール8432085330(ファームウェアv1.43.2)
フィールドバスキャリアMTは、フィールドバスケーブルを介してMTF6000コントローラに接続され、フィールドバスモジュールからイーサネットケーブルを介してPLCに接続されます。
Anybus PROFINETモジュールのNS LED用共通フィールドバスキャリアMTコード:
オフ=オフライン
緑色=オンライン(RUN)
赤、1回点滅=ステーション名エラー
赤、2回点滅= IPアドレスエラー
赤、3回点滅=設定エラー
Anybus EtherCAT モジュールのERR LED用共通フィールドバスキャリアMTコード:
オフ = エラーなし
赤、点滅 = 無効な構成
赤、1 点滅 = 未承諾状態の変更
赤、2 点滅 = 同期マネージャのウォッチドッグタイムアウト
AnybusモジュールEtherNet / IPのMS LEDの共通フィールドバスキャリアMTコード:
オフ = 電源なし
緑 = スキャナによるコントローラが実行状態にあり、CIP 同期が有効になっている場合、時刻はグランドマスタークロックに同期されます。
緑、点滅 = 未設定、スキャナがアイドル状態、または CIP 同期が有効の場合、時刻はグランドマスタークロックを同期します。
赤 = 重大な障害(例外-状態、致命的なエラーなど)
赤、点滅 = 回復可能な障害。モジュールは構成されていますが、保存されているパラメーターは現在使用されているパラメーターと異なります。
設定
パラメータ | 説明 |
|---|---|
フィールドバスタイプ | ロードするフィールドバス設定の種類。タイプはフィールドバスキャリアMT内のモジュールと一致する必要があります。 バージョン1.12.0からのPROFINETとバージョン1.16.0からのEtherCATおよびEtherNet/IPをサポートします。 |
マップサイズ | コントローラとの間で転送するバイト数。値は、マップ設定(コントローラーへ/コントローラーから)で選択した方向によって異なります。 |
オフラインでのツール停止 | [はい] の場合で、フィールドバス接続がオフラインの場合、ツールは無効になります。 |
設定された実際の値
パラメータ | 説明 |
|---|---|
ステータス | フィールドバスキャリアMTのステータスを示します。
フィールドバスキャリアMTとPLC間の通信は、アクティブステータスでのみ利用可能です。 |
DHCP が有効 | DHCP 構成が保存されているかどうかを示します。(PROFINET、EtherNet/IP) |
IP アドレス | IPアドレスを示します。(PROFINET、EtherNet/IP) |
Subnet mask(サブネットマスク) | サブネットマスクを示します。(PROFINET、EtherNet/IP) |
Default gateway(デフォルト ゲートウェイ) | ゲートウェイのIPアドレスを示します。(PROFINET、EtherNet/IP) |
Station name(ステーション名) | ステーション名を示します。(PROFINET) |
デバイス ID | デバイスの識別子番号を示します。(EtherCAT) |
更新間隔 | フィールドバスプロセスデータが内部的に更新される頻度を示します。 |
マップ設定
送信先コントローラー タブまたは送信元コントローラー タブを選択します。
追加を選択します。
信号構成の作成ダイアログウィンドウが開きます。
リストで項目名を選択して、項目を選択します。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を設定します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
追加を選択します。
追加する項目ごとに上記の手順を繰り返します。
パラメータ構成を開く
パラメータをダブルクリックして構成を開きます。または項目のチェックボックス をオンにしてから[開く]を選択します。
をオンにしてから[開く]を選択します。
パラメータ構成の削除
項目のチェックボックス
を選択します。複数項目を選択するには、キーボードのCtrlキーを押しながら選択します。
削除を選択するか、キーボードの Delete キーを押します。
パラメータの移動
フィールドバスマップでドラッグアンドドロップを使用してパラメータを移動することができます。パラメータをドロップする場所は、パラメータの開始位置を示します。
パラメータが1(またはそれ以上の)バイトの場合、パラメータがどのビット位置にドロップされているかに関係なく、開始位置をビット0に調整します。
パラメータが重なっている場合、パラメータは両方のテーブルで赤くマークされます。
パラメータリストにエラーが発生した場合は、保存する前にそのエラーを解決する必要があります。エラーがすでに発生している場合は、それ以上エラーを生成することはできません。その競合を最初に解決する必要があります。
データ形式
マップ設定で使用されるパラメーターの一般的なデータ形式の説明。
データ型(ToolsTalk MT) | データ長(ビット) | データ表現 | バイト順 |
|---|---|---|---|
ブール値 | 1 | EtherCAT: 1 BIT PROFINET: UNSIGNED8(汎用データモジュール)内の1ビット EtherNet/IP: BYTE内の1ビット | - |
ブール値 | 8 | 8つのブール値の配列 EtherCAT: BITARR8 PROFINET: UNSIGNED8 EtherNet/IP: BYTE | - |
符号なし | 8 | 符号なし整数、8ビット (UNSIGNED8、USINT) | - |
符号なし | 16 | 符号なし整数、16ビット(UNSIGNED16、UINT) | EtherCAT/EtherNet/IP: リトルエンディアン (LSB 最初) PROFINET: ビッグエンディアン (MSB 最初) |
符号なし | 32 | 符号なし整数、32ビット(UNSIGNED32、UDINT) | EtherCAT/EtherNet/IP: リトルエンディアン (LSB 最初) PROFINET: ビッグエンディアン (MSB 最初) |
整数 | 8 | 符号付き整数、8ビット(INTEGER8、SINT) | - |
整数 | 16 | 符号付き整数、16ビット(INTEGER16、INT) | EtherCAT/EtherNet/IP: リトルエンディアン (LSB 最初) PROFINET: ビッグエンディアン (MSB 最初) |
整数 | 32 | 符号付き整数、32ビット(INTEGER32、DINT) | EtherCAT/EtherNet/IP: リトルエンディアン (LSB 最初) PROFINET: ビッグエンディアン (MSB 最初) |
浮動 | 32 | 浮動小数点数、32ビット(FLOAT32、REAL) IEEE 754 単精度バイナリ浮動小数点形式; 1符号ビット、8指数ビット、23小数ビット、s eeeeeeee fffffff ffffffff fffffffff | EtherCAT/EtherNet/IP: リトルエンディアン (LSB 最初) PROFINET: ビッグエンディアン (MSB 最初) |
文字列 | 1..n | 事前定義されたサイズ(バイト数)の配列内のUTF-8エンコード文字列。 EtherCAT: UNSIGNED8 配列 PROFINET: UNSIGNED8 配列 EtherNet/IP: BYTE配列 | - |
使用可能なパラメータの詳細については、「リファレンス」の「フィールドバスパラメータの指定」を参照してください。
PLC構成(PROFINET)
PLCのモジュール構成はMTF6000パラメータ構成と一致している必要があります。モジュール構成がPLCで手動で行われる場合は、以下を考慮してください。
すべての送信先コントローラーパラメータ(PLCの出力)は、送信元コントローラーパラメータ(PLCの入力)の前に設定する必要があります。
シングルビットパラメータ(長さ= 1)で構成されるバイトはすべて、PLC上の汎用データモジュールで設定する必要があります。シングルビットモジュールはPROFINETプロトコルではサポートされていませんが、ユーザーは汎用データモジュールの内容を追跡する必要があります。シングルビットパラメータではなく、ビットパラメータグループ(たとえば、IF 1 - IF 8)からなるモジュールを使用することをお勧めします(すべてのシングルビットパラメータはグループパラメータにも存在します)。
MTF6000構成で空のバイトは、PLC構成で空のデータモジュールを持つ必要があります。空のデータモジュールは1/2/4/8/16/32/64/128 バイトで構成されています。空の領域には、できるだけ多くのバイトを持つモジュールを最初に、バイト数順に埋めて行き、最後に空の領域が空のデータモジュールでいっぱいになるようにします。パフォーマンスが低下するため、必要でない場合は構成内に空のスペースを入れないでください。
ネットワーク設定
ネットワーク設定は、使用しているフィールドバスの種類に応じて異なる方法で構成できます。構成が利用可能な場合は、右上コーナーにボタンが表示されます。
EtherCAT
パラメータ | 説明 |
|---|---|
デバイス ID | EtherCAT モジュールの識別子番号。 |
PROFINET
ネットワーク設定の構成はPROFINETでは使用できません。これらの設定は外部構成ツールからのみ構成できます。
イーサネット/IP
パラメータ | 説明 |
|---|---|
Network mode (ネットワークモード) | 静的IPまたはDHCPの構成 |
IP アドレス | ネットワークモードが静的に設定されている場合は、IPアドレスを構成します。 |
サブネットマスク | ネットワークモードが静的に設定されている場合は、サブネットマスクを構成します。 |
Default gateway(デフォルト ゲートウェイ) | ネットワークモードが静的に設定されている場合は、デフォルトゲートウェイを構成します。 |
ダウンロードの説明
このボタンは右上コーナーにあり、現在構成されているフィールドバスタイプのコントローラの説明ファイル(ESI、GSDML、EDSなど)をダウンロードするために使用できます。
フィールドバス診断
診断モードの有効化/無効化
診断モードを有効にするには、右上隅にある [ 診断モード有効 ] ボタンを押します。
診断モードには2つのサブモードがあります。
強制-特定の値を操作してPLCに送信するために使用されます。
モニター - パラメーターに含まれるものをライブで表示します。
診断モードを無効にするには、ボタンをもう一度押します (「 診断モード無効」となります)。
[リスト] テーブルでは、各パラメータに [診断] という新しいタブが表示されます。この列には、パラメーターの値が表示されます。パラメータは、テキストまたは信号として表示できます。信号はラジオボタンとして表示されます。ラジオボタンがマークされている場合、信号が高いことを意味し、そうでない場合、信号が低いことを意味します。
強制モードでは、信号に2つのラジオボタンがあります。オンとオフ、オンは信号が高いことを意味し、オフは信号が低いことを意味します。
監視モード
監視 のラジオボタンを選択します。
[診断]列のすべてのパラメーターを表示します。
[診断]列の黒い三角形を押して、組み合わせたパラメーターを展開し、各ビットの信号を表示します。
強制モード
[強制]ラジオボタンを選択します(コントローラーからデータを送信する場合のみ使用可能)。
別の値に強制する必要があるパラメーターの値を入力し、[ フレームの送信]を押します。
操作した値をPLCに送信するには、送信フレームを押す必要があります。パラメータ値が入力されたという理由だけで、値は自動的にPLCに送信されません。
ネットワークアップデート
[接続の管理] メニューで [ネットワークアップデート] をダブルクリックして、ネットワークアップデートセッションを開始します。
リストが空の場合でもテンプレートを取得するには、[リストを保存] を選択します。
テンプレートに正しいコントローラー情報を入力します。
コントローラーのシリアル (オプション)
コントローラー名 (オプション)
IP アドレス
ファームウェアバージョン (オプション)
オプションのコントローラー情報については、接続が正常に確立された場合、TTMT はコントローラーから情報を収集します。
リストを保存
入力したコントローラーをタブ区切りの csv リストに保存します。TTMT は「;」とタブ区切りのリストの両方を読み取ることができます。
コントローラーを追加しない場合に [リストを保存] オプションを使用すると、外部から入力できる正しいヘッダーを含むテンプレートが作成されます。
リストをロード
csv ファイルを TTMT に読み込み、すべてのコントローラーをリストに表示します。
接続を確認
リスト内の各コントローラーの接続を確認し、そのコントローラーがネットワーク上でアクティブかどうかを確認します。
ステータス | 説明 | |
|---|---|---|
| 不明 | 接続はまだ確認されていません |
| 接続エラー | コントローラーに接続できませんでした。 |
| 接続に成功しました | コントローラーはアクティブで、ネットワーク上で使用可能です。 |
| 接続中 | 接続を確認しています。 |




プログラムの更新
締め付けコントローラーでのみ機能します。
ネットワーク更新ファイル (*.mtpm) を保存します。
TTMT で必要なセットアップを開きます。
[接続の管理] タブを開きます。
[保存] を選択します。
[ファイルの種類] を [一括更新ファイル (*.mtpm)] に設定します。
複数のコントローラーを新しい構成で更新します。
目的の *.mtpm ファイルを選択します。
[開く] を選択します。
ステータス | 説明 | |
|---|---|---|
| 不明 | 接続はまだ確認されていません |
| エラー |
|
| OK | プログラムが正常に更新されました。 |
| 進行中 |
|
ネットワークアップデートを使用すると、TTMT によって既存のすべての Pset、バッチシーケンス、および識別子が削除され、上書きされます。
ファームウェアを更新する
[ファームウェア更新] を選択し、.fw ファイルを選択して、リスト内のすべてのコントローラーを選択したファームウェアで更新します。
ステータス | 説明 | |
|---|---|---|
| 不明 | 接続はまだ確認されていません |
| エラー |
|
| OK | ファームウェアが正常に更新されました。 |
| 進行中 |
|
ネットワークアップデートが機能するにはバージョン 3.2 以上が必要です
追加
IP アドレスを入力して、リストにコントローラーを 1 つ追加します。
IP アドレスが追加されると、TTMT は自動的に接続チェックを開始します。
開く
特定のコントローラーの接続を確認します。
削除
リストからコントローラーを削除します。
トラブルシューティング
スレッド損傷エラーの不正なトリガ
原因: 自己スレッドフェーズの終了後、ジョイントがネジ頭に達するまでにトルクが減少するために、連続していない自己スレッドジョイントが不正なスレッド損傷エラーをトリガしている可能性があります。
解決策: スレッド損傷アルゴリズムは、このタイプのジョイントには正しく動作しません。そのため、Damaged thread detection (スレッド損傷の検出)パラメータを無効にすることを推奨します。
リヒットの不正なトリガ
原因: コントローラが、締め付けの開始時にネジにすでに多少のトルクがあることを検出すると、リヒットがトリガされます。
大きな側面荷重でネジがジョイントに挿入されると、トルクが起動時より大幅に高くなるので、リヒットアルゴリズムがリヒットエラーを間違ってトリガする可能性があります。
解決策: ツールを安定させ、側面荷重を回避します。側面荷重が必要な場合は、Tool rehit enabled (ツールリヒット有効)パラメータを No(いいえ)に設定します。
不正な着座点
原因: 通常、不正な着座点は間違った設定によって引き起こされます。
ツールがゼロから高速で動作して、トルクを上昇させ始める締め付け開始時に着座が間違ってトリガされることがあり、その場合勾配スパイクが発生し、着座検出を間違ってトリガします。
不正な着座変位と勾配トリガは、着座点を間違った場所に示します。
低速のために、勾配トルクが読み取り不可能になることがあります。(自転車に乗る場合のように、ゆっくりとペダルを踏むと揺れが大きくなり、速度を上げるとまっすぐ走るようになります。)
解決策:
着座が締め付けの始めにトリガされる場合、TSM または SCS ステップの前に 100° の角度またはネジ山嵌合いステップを最初に追加し、開始時の勾配スパイクを超える必要があります。
着座が少し外れる場合は、設定が間違っている可能性があります。戦略を正しく設定する方法を次に示します。
2ステップの締め付けを作成します。
ステップ 1:角度(またはネジ山嵌合い)ステップを 100° にします。
ステップ 2:TSM/SCS。
希望するターゲットを設定し、締め付けを行います。
分析で締め付けグラフを開きます。
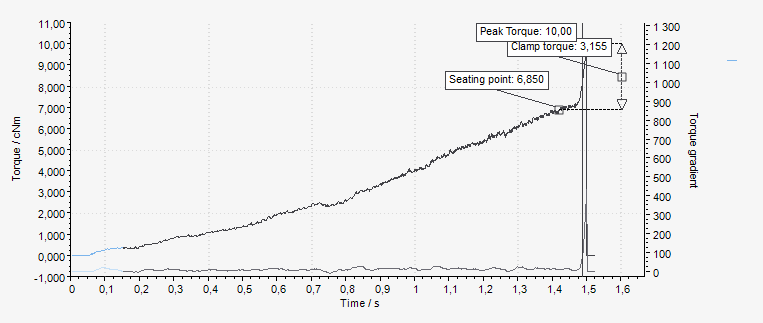
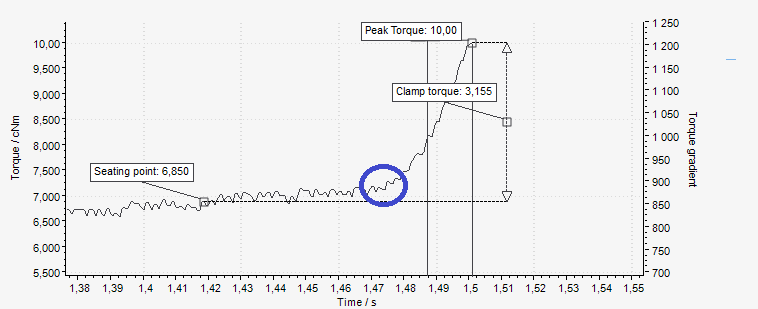
勾配トリガポイントを確認します。トリガポイントはクランプトルクの半分ほどでトリガされるはずです。この制限は、トルク勾配に基づきます。トリガポイントが OK でない場合は、締め付けに合わせてこれを増減します。勾配トリガポイントが OK になるまで締め付けを繰り返します。
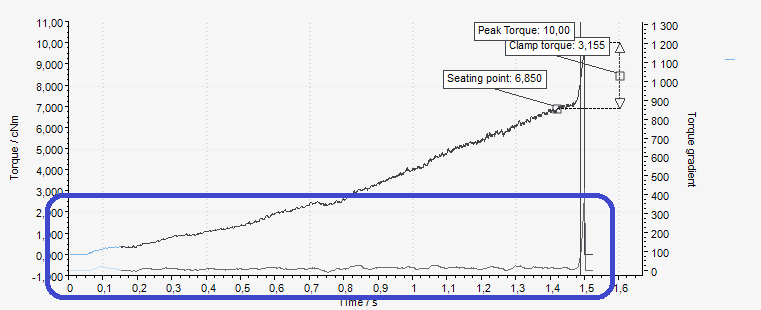
着座角度変位を変更します。
着座点が正しい着座点の前にトリガされる場合、着座角度変位パラメータを減少させます。
着座点が正しい着座点の後でトリガされる場合、着座角度変位パラメータを増加させます。
上の例では、着座は正しい着座点の前にトリガされています。そのため、着座角度変位を減少させる必要があります。
締め付けを再度行って、正しい着座点になるまで着座角度変位を微調整します。
100° の角度/ネジ山嵌合いステップが先に行われる場合でも、着座がステップの開始時にトリガされる場合は、速度が遅すぎる可能性があります。勾配が間違っている場合は、速度を上げて再度試します。
グラフが急下降し、締め付けの途中でトルクを損失する。
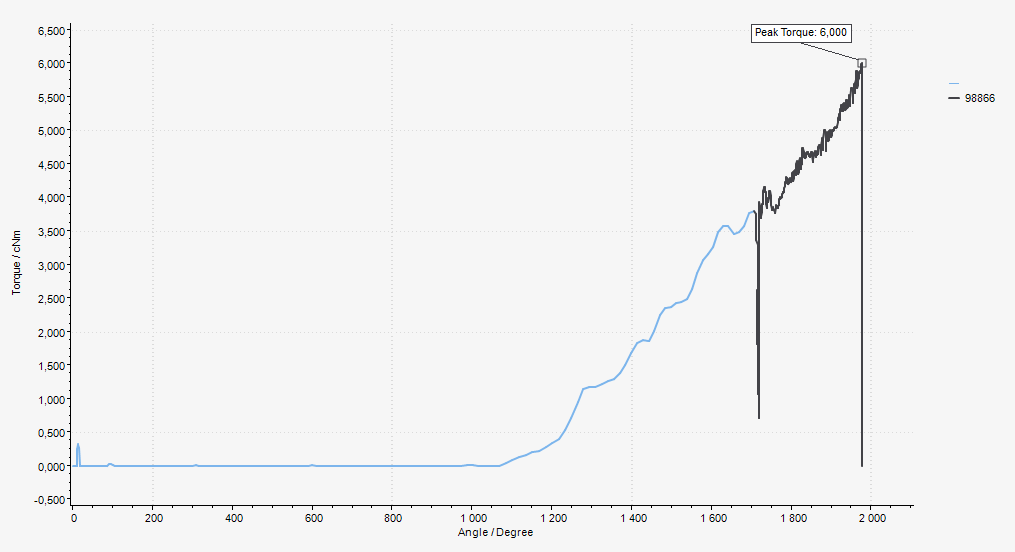
原因: これは、トルクステップの前に角度ステップがネジを締め付け始めていることから発生します。「急下降」は、ツールがトルクを上昇させている間に、非常に高速から低速になると起こります。
解決策: ランダウンとして使用される角度ステップは常にネジが着座する前に終了する必要があります。
このタイプの締め付けを回避するには、ターゲット角度を小さくして開始点を上回らないようにします。
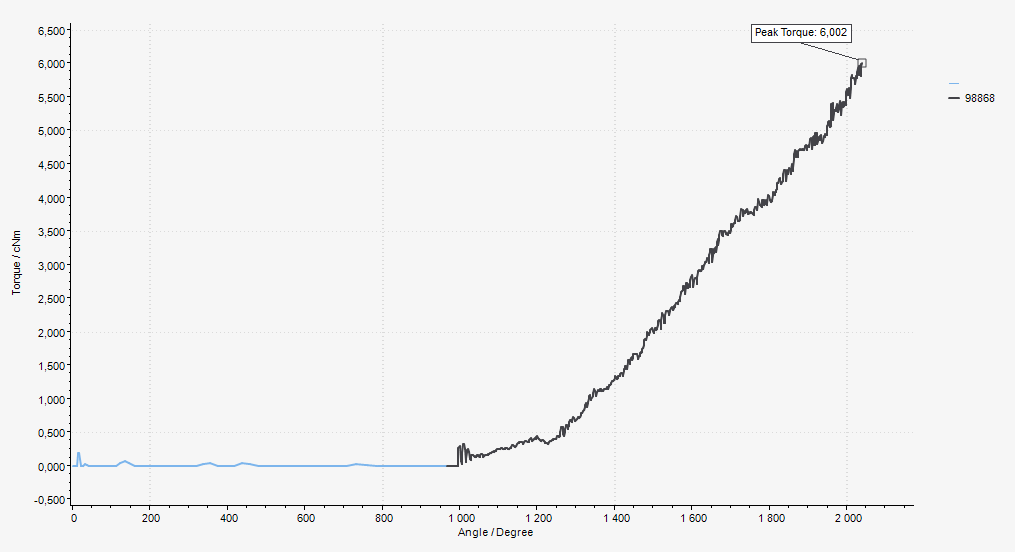
この締め付けは、角度ステップが低いターゲット角度で、ネジが着座する前に終了すること以外は上と同じです。これで急下降がなくなります。
ToolsNet 8 に接続できない
原因: MTF6000 コントローラが ToolsNet 8 に接続しない理由は多数ありますが、最も一般的な理由はネットワーク設定が間違っている場合です。
解決策:
ToolsNet の IP アドレスが ToolsNet 8 のサーバー IP アドレスと同じであることを確認します。
コントローラの IP アドレスが ToolsNet の IP アドレスと同じでないことを確認します。
コントローラの IP アドレスが固有であることを確認します。
サブネットマスクが正しいことを確認します。
ゲートウェイの IP アドレスが正しいことを確認します。
ToolsNet ポートが正しいことを確認します。ToolsNet 8 は MTF6000 のデフォルトとしてポート 6700 を使用しています。
コントローラと ToolsNet 8 サーバーが同じネットワークにあることを確認します。
これは、次のようにテストします。
コマンドプロンプトを開きます(windows のスタートボタンを押して、「cmd」を入力)。
「ping xxx.xxx.xxx.xxx」と入力します(xxx.xxx.xxx.xxx にはコントローラの IP アドレスを入力)。
応答があるかを確認します。
「ping yyy.yyy.yyy.yyy」と入力します(yyy.yyy.yyy.yyy にはToolsNet サーバーの IP アドレスを入力)。
応答があるかを確認します。
次にアクセスに成功した場合の応答の一例を示します:
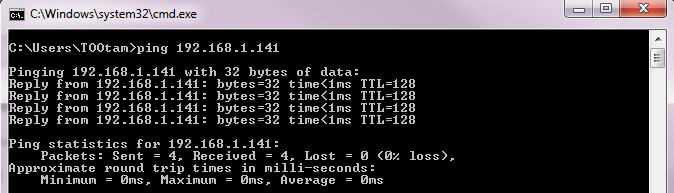
コントローラと ToolsNet 両方にアクセス可能な場合、問題はネットワーク設定ではなく、ToolsNet 8 のサービスにあります。
ToolsNet 8 が MTF6000 と通信するには、次のサービスが実行している必要があります。
ライセンスサーバー
データ収集サービス
プロトコルインターフェースモジュール
インターネット情報サービス
データ通信サービス
コントローラがアクセスできない場合に、この応答が示されます。

コントローラにアクセスできない場合は、ネットワーク設定の問題です。
コントローラが ToolsNet 8 サーバーと同じネットワークに接続していることと、IP、マスク、ゲートウェイが正しいことを再度確認します。
参考
イベントコード
エラーコード | イベント情報 | 使用説明 |
|---|---|---|
101 | Supply voltage exceeded | 電源を点検します。 |
102 | 供給電圧が低すぎます | 電源を点検します。 |
103 | Internal 24V exceeded (内部24Vを超過) | 外部設備機器の接続を外します。 |
104 | Internal 24V too low (内部24Vが低すぎる) | 外部設備機器の接続を外します。 |
105 | Internal 12V exceeded (内部24Vを超過) | 接続されている場合、ツールの接続を外します。 |
106 | Internal 12V too low (内部24Vが低すぎる) | 接続されている場合、ツールの接続を外します。 |
107 | Internal 5V exceeded (内部24Vを超過) | 接続されている場合、ツールの接続を外します。 |
108 | Internal 5V too low (内部24Vが低すぎる) | 接続されている場合、ツールの接続を外します。 |
109 | External 24V error (外部24Vエラー) | 外部機器を取り外し、コントローラーを再起動します。 |
110 | DC/DC温度エラー | コントローラを交換します。 |
111 | I/Oエクスパンダが再初期化されました | OKを押して続行します。 |
112 | I/O の再初期化に失敗しました | コントローラーを再起動します。 |
113 | 電源障害 | 電源を点検します。 |
120 | Zero offset error, Current (ゼロオフセットエラー、電流) | コントローラを交換します。 |
121 | Zero offset error, Sensor (ゼロオフセットエラー、センサ) | ツールトランスデューサまたはツールを交換します。 |
122 | Motor current low (モータ電流が低い) | ツールを交換します。 |
123 | Motor current exceeded | ツールを交換します。 |
124 | Motor driver voltage too low (モータドライバ電圧が低すぎる) | ツールを交換します。 |
125 | Motor driver short circuit (モータドライバ短絡) | ツールを交換します。 |
126 | Motor driver temperature exceeded (モータドライバ温度を超過) | ツールを交換します。 |
127 | モータードライバー オープン負荷 | ツールを交換します。 |
128 | モータードライバー障害 | コントローラーを再起動します。 |
130 | EEPROM read error (読取エラー) | コントローラを交換します。 |
131 | EEPROM write error (書込エラー) | コントローラを交換します。 |
132 | Internal hardware error (内部ハードウェアエラー) | コントローラを交換します。 |
133 | ファイルシステムエラー | IAM MTを交換します。 |
134 | USB host overcurrent (USBホスト過電流) | USBデバイスの接続を外します。 |
135 | USBフラッシュドライブのボリュームエラー | 別のUSBフラッシュドライブをお試しください。 |
140 | ツールが接続されていません | ツールを接続します。 |
141 | ツールがサポートされていません。 | サポートされているツールを接続します。 |
142 | ツール通信エラー | ツールを交換します。 |
143 | Tool 5V error (ツール5Vエラー) | ツールを交換します。 |
144 | Tool 12V error (ツール5Vエラー) | ツールを交換します。 |
150 | Tool initializing error (ツール初期化エラー) | 起動時、ツールが支障なく動作していることを確認します。 |
151 | Friction too high | 起動時、ツールが支障なく動作していることを確認します。 |
152 | ツール角度エンコーダーエラー | ツールを接続します。 |
153 | Tool direction error (ツール方向エラー) | ツールを接続します。 |
154 | Bit was blocked (ビットがブロックされた) | 起動時、ツールが支障なく動作していることを確認します。 |
155 | Tool motor temperature exceeded (ツールモータ温度を超過) | ツールの温度が低下するまで待ちます。 |
156 | ツールがサポートされていません。 | トランスデューサー内臓ツールは、現在のライセンスでサポートされていません。 |
157 | Failed to update tool software (ツールソフトウェアを更新できませんでした) | トランスデューサーを外します。 |
158 | Tool initialization error (ツール初期化エラー) | |
159 | Torque measurement warning(トルク測定警告) | ツールをキャリブレートします。 |
160 | Torque measurement error(トルク測定誤差) | ツールをキャリブレートします。 |
201 | Runtime parameter error (ランタイムパラメータエラー) | コントローラーを再起動します。 |
202 | Invalid controller parameters (無効なコントローラパラメータ) | IAM MTを交換します。 |
203 | Invalid controller parameters (無効なコントローラパラメータ) | ツールを交換します |
204 | Invalid I/O parameters (無効なI/Oパラメータ) | IAM MTを交換します。 |
205 | Invalid identifier parameters (無効な識別子パラメータ) | IAM MTを交換します。 |
206 | Invalid Pset parameters (無効なPsetパラメータ) | IAM MTを交換します。 |
207 | Invalid Batch sequence parameters (無効なバッチシーケンスパラメータ) | IAM MTを交換します。 |
208 | Invalid password parameters (無効なパスワードパラメータ) | IAM MTを交換します。 |
209 | Tool statistics error (ツール統計エラー)。 | ツールを交換します。 |
210 | Unable to load fonts from IAM MT (IAM MTからフォントをロードできない) | IAM MTを交換します。 |
211 | Invalid tool configuration parameter (無効なツール構成パラメータ) | IAM MTを交換します。 |
212 | Invalid operator parameters (無効なオペレーターパラメータ) | IAM MTを交換します。 |
220 | Result database error (結果データベースエラー) | IAM MTを交換します。 |
221 | Graph database error (グラフデータベースエラー) | IAM MTを交換します。 |
225 | Reset result database (結果データベースのリセット) | 結果データベースがリセットされました。 |
226 | Reset graph database (グラフデータベースのリセット) | グラフデータベースがリセットされました。 |
227 | エクスポートする結果がありません-データベースが空です | |
228 | 古い結果は削除されました | |
229 | 古いグラフは削除されました | |
230 | Pset not configured for connected tool (接続されたツールのためにPsetが設定されてない) | 別のPsetを選択する、またはToolsTalk MTの新しいPsetを設定します。 |
231 | Select error source (エラーソースの選択) | Select source (ソースの選択)を変更します。ToolsTalk MTコントローラ設定で変更することができます。 |
232 | Select error busy (エラービジーの選択) | ツールが動作しなくなるまで待ちます。 |
240 | ネットワーク構成にエラーがあります | ネットワーク構成を変更してください。 |
241 | IP アドレスとゲートウェイが同じサブネットにありません | ネットワーク構成を変更してください。 |
301 | ツールが接続されています | OKを押してツールを初期化します。 |
302 | Tool initializing (ツールの初期化) | お待ちください。 |
303 | Tool software updating (ツールソフトウェアのアップデート) | お待ちください。 |
304 | Tool software update error (ツールソフトウェアアップデートエラー) | ツールケーブルを点検するか、ツールを交換します。 |
305 | Tool calibration required (ツールの較正が必要) | ツールをキャリブレートします。 |
306 | サービスが必要 | ツール較正の有効期限が切れていますツールをキャリブレートします。 |
310 | Software has been updated (ソフトウェアがアップデートされた) | OKを押して続行します。 |
311 | Software file wasn't found on USB (ソフトウェアファイルがUSBにない) | ソフトウェアファイルをUSBフラッシュメモリにコピーします。 |
312 | Software update failed (ソフトウェアアップデートの失敗) | USBのソフトウェアファイルが壊れている可能性があります。USBのソフトウェアファイルをアップデートして、再び試行します。 |
313 | Copying software (ソフトウェアのコピー) | お待ちください。Software is being copied to/from USB (ソフトウェアをUSBへ/からコピー中)。 |
314 | 最初の 20 個の .mtp または .fw ファイルのみを表示できます | OKを押して続行します。 |
315 | ソフトウェアの更新に失敗しました - ハードウェアに互換性がありません | |
320 | Login expired (ログイン失効) | ユーザがログアウトしました。 |
321 | User has logged in (ユーザがログインしました) | |
322 | The current user was logged out (現在のユーザがログアウトしました) | |
350 | バッテリーアダプタのハードウェアエラー | |
351 | バッテリーアダプター温度が正常範囲を超えています | バッテリーを冷ましてください。 |
352 | バッテリーアダプターの充電障害 | バッテリーを交換してください。 |
353 | バッテリー温度エラー | バッテリーを冷ましてください。 |
354 | バッテリー放電エラー | PSU (電源ユニット) を接続してバッテリーを充電します。 |
355 | バッテリー残量が極めて低くなっています | PSU (電源ユニット) を接続してバッテリーを充電します。 |
356 | バッテリーはサポートされていません | バッテリーを交換してください。 |
357 | バッテリーアダプターの充電障害 | バッテリーを交換してください。 |
358 | バッテリーアダプターの充電障害 | バッテリーを冷やすか、バッテリーを交換してください。 |
401 | Tightening error (締め付けエラー) | OKを押して続行します |
402 | Batch sequence error (バッチシーケンスエラー) | OKを押して続行します |
403 | Batch sequence parameter error (バッチシーケンスパラメータエラー) | コントローラを点検して、どのパラメータが不正か調べます |
404 | Pset not supported (Psetがサポートされていない) | 別のPsetを選択します |
405 | Pset parameter error (Pset パラメータエラー) | PSet を更新します。 |
507 | ToolsNet が結果をスキップしました | |
601 | コントローラー通信エラー | |
602 | トランスデューサー通信エラー | |
603 | USB リンクの喪失により測定データが失われました | |
604 | トランスデューサーが接続されています | |
605 | トランスデューサーが検出されませんでした | トランスデューサーを接続して再試行してください。 |
606 | リモートデバイスがビジー状態です | 後で再試行してください。 |
607 | Transducer service required (トランスデューサーにサービスが必要) | |
608 | Zero offset error, Transducer(ゼロオフセットエラー、トランスデューサー) | トランスデューサーケーブルが正しく固定されていることを確認するか、ケーブル/トランスデューサーを交換してください。 |
609 | アクティブな検証にはオペレーター ID が必要です | オペレーター ID をスキャンしてください。 |
610 | 接続されているデバイスは QA に対応していません | |
701 | フィールドバスはコントローラーのハードウェアにおいてサポートされていません | コントローラーを C バージョン以上のものとに交換してください。 |
702 | Invalid fieldbus parameters (無効なフィールドバス パラメータ) | IAM MTを交換します。 |
703 | Fieldbus module error (フィールドバスモジュールのエラー) | フィールドバス ケーブルを確認するか、フィールドバス モジュールを交換して、[OK] を押して続行します。 |
704 | Fieldbus driver warning (フィールドバスドライバーの警告) | ファームウェアの更新を確認し、[OK] を押して続行します。 |
705 | Fieldbus driver error (フィールドバスドライバー エラー) | ファームウェアの更新を確認します。 |
706 | Fieldbus module in error state (フィールドバスモジュールがエラー状態です) | フィールドバスネットワークの状態を確認してください。 |
707 | Fieldbus module in exception state (フィールドバスモジュールが例外状態です) | ファームウェアの更新を確認します。 |
720 | Fieldbus module not connected (フィールドバスモジュールが接続されていません) | フィールドバスモジュールを接続するか、フィールドバスケーブルを確認するか、フィールドバスモジュールを交換してください。 |
721 | Fieldbus module not supported, wrong module type (フィールドバスモジュールはサポートされていません。モジュールタイプが正しくありません) | サポートされているフィールドバスモジュールを接続してください。 |
722 | Fieldbus module not supported, wrong network type (フィールドバスモジュールはサポートされていません。ネットワークタイプが正しくありません) | サポートされているフィールドバスモジュールを接続してください。 |
723 | Fieldbus module not supported, wrong provider ID (フィールドバスモジュールはサポートされていません。プロバイダー ID が正しくありません) | サポートされているフィールドバスモジュールを接続してください。 |
724 | Fieldbus module not supported, FW version not approved (フィールドバスモジュールはサポートされていません。ファームウェアバージョンは承認されていません) | サポートされているフィールドバスモジュールを接続してください。 |
730 | Pset not configured for connected module (接続されたモジュールに対してフィールドバスが構成されていません) | フィールドバスタイプの構成を変更するか、正しいモジュールを接続してください。 |
731 | Fieldbus parameter error フィールドバス パラメータエラー) | フィールドバスパラメータを更新して [OK] を押します。 |
732 | Fieldbus configuration of network settings failed (ネットワーク設定のフィールドバス構成に失敗しました) | フィールドバスのセットアップが正しいことを確認して、もう一度試してください。 |
740 | Max 128 submodules supported for Profinet (Profinet では最大 128 のサブモジュールがサポートされています) | フィールドバスパラメータを更新して [OK] を押します。 |
741 | Profinet station name syntax error (Profinet ステーション名の構文エラー) | フィールドバスパラメータを更新して [OK] を押します。 |
901 | IAM MT not present (IAM MTがない) | IAM MTを挿入します。 |
902 | Failed to initialize IAM MT (IAM MT初期化の失敗) | コントローラを再始動するか、IAM MTを交換します。 |
903 | IAM MT read error (読取エラー) | IAM MT ルート上の FW ファイルの名前が正確に MTF6000.FW であることを確認します (PC から手動で確認)。それ以外の場合は IAM MT を交換してください。 |
904 | IAM MT write error (書込エラー) | IAM MTを交換します。 |
905 | Invalid software on IAM MT (IAM MTの不正なソフトウェア) | (PCから手作業で)IAM MTのソフトウェアをアップデートします。 |
906 | Flash programming error (フラッシュ設定エラー) | コントローラを交換します。 |
907 | IAM MTの不正なライセンス | IAM MT のソフトウェアを IAM ライセンスをサポートする新しいバージョンに (PC から手動で) 更新します。それ以外の場合は IAM MT を交換してください。 |
908 | Incompatible software version (ソフトウェアバージョンに互換性がありません) | IAM MT のソフトウェアを HW をサポートする新しいバージョンに (PC から手動で) 更新します。それ以外の場合は IAM MT を交換してください。 |
990 | External event (外部イベント) | |
991 | External event (外部イベント) | |
992 | External event (外部イベント) |
締付エラーコード
Tightening error (締め付けエラー) | 説明 |
|---|---|
トリガ喪失 | 締付けが実行される前にツールトリガが解除されました。 |
Bit slip detected (ビットスリップが検出された) | ビットが滑ってネジから外れました。頻繁に発生する場合は、ビットの交換を推奨します。(Psetごとに有効/無効にすることができます)。これをOFFにしないでください。OFFになっていると、シーティング制御ステップにおいて誤ったシーティングトリガが発生します。 |
Damaged thread detected (ネジ山損傷を検出) | ネジ山が損傷しネジがこれ以上トルクを上げることが不可能です。 |
Re-hit detected (再ヒット検出) | ネジが再び締め付けられました。Psetごとに有効/無効にすることができます。 |
Seating was not detected (シーティングが検出されない) | シーティングポイントが検出されません。 |
Total time exceeded (合計時間が超過) | 締付けのグローバル最大時間限度を超過しました。 |
Global time not reached (グローバル時間に達していない) | 締付けのグローバル最小時間限度に達しませんでした。 |
Time exceeded (時間が超過) | 締付けのPsetステップ最大時間限度を超過しました。 |
Time not reached (時間に達していない) | 締付けのPsetステップ最小時間限度に達しませんでした。 |
Torque high (トルク高) | Pset最大トルク限度を超過しました。 |
Torque low (トルク低) | Pset最小トルク限度に達しませんでした。 |
Angle high (角度高) | Pset最大角限度を超過しました。 |
Angle low (角度低) | Pset最小角限度に達しませんでした。 |
Total angle high (合計角高) | Psetのグローバル最大角限度を超過しました。 |
Total angle low (合計角低) | Psetのグローバル最小角限度に達しませんでした。 |
Tightening angle high (締付角高) | トルクステップ最大締付角を超過しました。締付角は、角トリガトルクから目標トルクまでの角度です。 |
Tightening angle low (締付角低) | トルクステップ最小締付角に達しませんでした。締付角は、角トリガトルクから目標トルクまでの角度です。 |
Seating angle high (シーティング角高) | 最大クランプ角を超過しました。これは、シーティング制御ステップまたはトルクシーティング監視ステップにおいてのみ発生する可能性があります。クランプ角は、シーティングから終了した締付けまでの角度です。 |
シーティング角低 | 最小クランプ角に達しませんでした。これは、シーティング制御ステップまたはトルクシーティング監視ステップにおいてのみ発生する可能性があります。クランプ角は、シーティングから終了した締付けまでの角度です。 |
Seating torque high (シーティングトルク高) | 最大クランプトルクに達しませんでした。これは、シーティング制御ステップまたはトルクシーティング監視ステップにおいてのみ発生する可能性があります。クランプトルクは、シーティングから終了した締付けまでの角度です。 |
Seating torque low (シーティングトルク低) | 最小クランプトルクに達しませんでした。これは、シーティング制御ステップまたはトルクシーティング監視ステップにおいてのみ発生する可能性があります。クランプトルクは、シーティングから終了した締付けまでの角度です。 |
クランプ角低 | クランプ角が上限を超えています。 |
クランプ角高 | クランプ角が下限に達していません。 |
クランプトルク高 | クランプトルクが上限を超えています。 |
クランプトルク低 | クランプトルクが下限に達していません。 |
トルクエラーの解除 | 締め付けの最中にトルクがトルク限度解除値を下回りました。 |
ネットワーク クイックガイド
IP アドレスとは
IP アドレスとはネットワークにおける各デバイスの一意の識別子で、それぞれ異なる2つのデバイスが同一の IP アドレスを持つことは出来ません。IP アドレスとサブネットマスクが組み合わさって、互いに通信できるデバイスが特定されます。
サブネットマスクの仕組み
サブネットマスクはネットワーク上の各デバイスに、どのデバイスと通信できるかを指示するのに使用される識別子です。次の表は、各部がサブネットマスクに応じて、どのデバイスがお互いに通信できるかを視覚的に示しています。
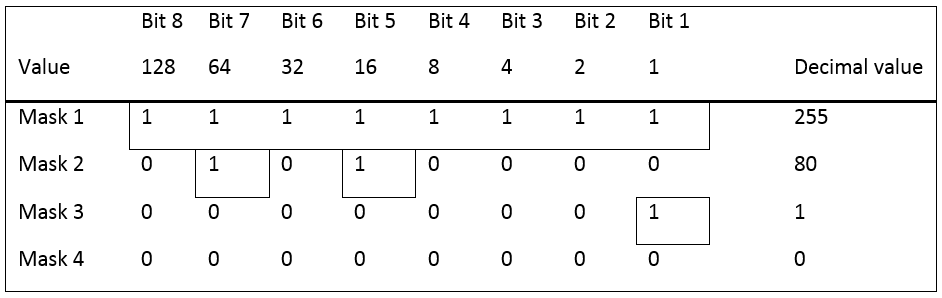
質問:サブネットマスク 255 において、どのコントローラーが互いに通信できますか?

回答:サブネットマスク 255 においては、全てのビットが同じ値となっています。つまり、IP 1 と 5、IP 3 と 6 が互いに通信できます。
質問:サブネットマスク 80 において、どのコントローラーが互いに通信できますか?

回答:サブネットマスク 80 においては、ビット 7 と 5 は同じ値である必要があります。つまり、IP 1、3、5、6 が互いに通信できます。
質問:サブネットマスク 1 において、どのコントローラーが互いに通信できますか?

回答:サブネットマスク 1 において、ビット 1 が同じ値である必要があります。つまり、IP 1、3、5、6、および IP 2 と 4 が互いに通信できます。
質問:サブネットマスク 0 において、どのコントローラーが互いに通信できますか?
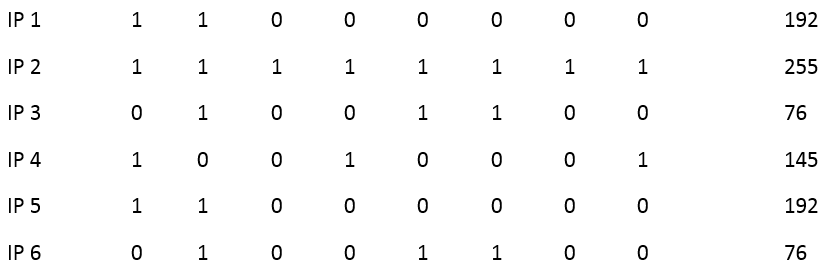
回答:サブネットマスク 0 においては、0 ビットが同じ値である必要があります。つまり、全ての IP アドレスが互いに通信できます。
正しい設定
MTF6000 と ToolsNet サーバー通信を正しくセットアップする方法の例を示します。
各 IP アドレスは 4 部構成となっており、各部は 8 ビットから成ります。これらは対応するサブネットマスクと一致する必要があります。最初の 3 部をサブネットマスク 255.255.255.0 と全く同じにするのが最も簡単で一般的なセットアップとなります。つまり、最後の 1 部は 0~255 の間の任意の数が可能です。

部 | サブネットマスク | IP アドレス | ゲートウェイ | ToolsNet | 一致 |
|---|---|---|---|---|---|
1 | 255 | 192 | 192 | 192 | 完全一致 |
2 | 255 | 168 | 168 | 168 | 完全一致 |
3 | 255 | 1 | 1 | 1 | 完全一致 |
4 | 0 | 60 | 1 | 100 | 一致は不要 |
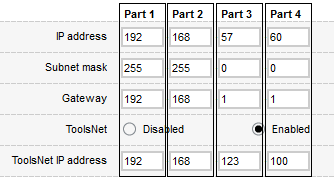
部 | サブネットマスク | IP アドレス | ゲートウェイ | ToolsNet | 一致 |
|---|---|---|---|---|---|
1 | 255 | 192 | 192 | 192 | 完全一致 |
2 | 255 | 168 | 168 | 168 | 完全一致 |
3 | 0 | 57 | 1 | 123 | 一致は不要 |
4 | 0 | 60 | 1 | 100 | 一致は不要 |
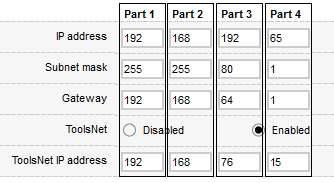
部 | サブネットマスク | IP アドレス | ゲートウェイ | ToolsNet | 一致 |
|---|---|---|---|---|---|
1 | 255 | 192 | 192 | 192 | 完全一致 |
2 | 255 | 168 | 168 | 168 | 完全一致 |
3 | 80 | 192 | 64 | 76 | ビット 5 と 7 で完全一致 |
4 | 1 | 60 | 1 | 100 | ビット 1 で完全一致 |
間違った設定
MTF6000 と ToolsNet サーバー通信を間違ってセットアップする方法の例を示します。
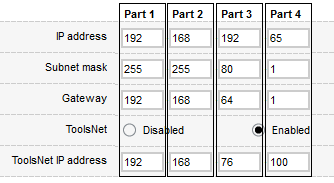
部 | サブネットマスク | IP アドレス | ゲートウェイ | ToolsNet | 一致 |
|---|---|---|---|---|---|
1 | 255 | 192 | 192 | 192 | 完全一致 |
2 | 255 | 168 | 168 | 168 | 完全一致 |
3 | 80 | 192 | 64 | 76 | ビット 5 と 7 で完全一致 |
4 | 1 | 65 | 1 | 100 | ビット 1 で一致なし |


部 | サブネットマスク | IP アドレス | ゲートウェイ | ToolsNet | 一致 |
|---|---|---|---|---|---|
1 | 255 | 192 | 192 | 10 | ビット 8、7、4 と 2 で一致なし |
2 | 255 | 168 | 168 | 46 | ビット 8、3 と 2 で一致なし |
3 | 255 | 1 | 1 | 5 | ビット 3 で一致なし |
4 | 0 | 60 | 1 | 37 | 一致は不要 |
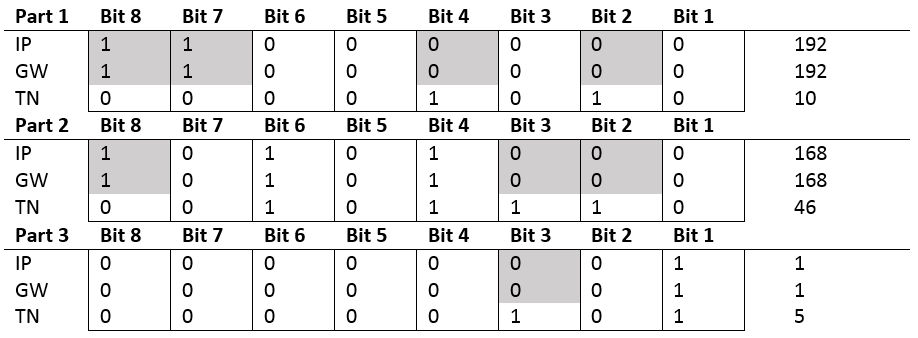
フィールドバスパラメータの仕様
ID | パラメータ | データ型 | ビット長 | 配列の長さの範囲: 最小 最大値 既定 | ユニットタイプ | コメント |
|---|---|---|---|---|---|---|
10 | モードを選択してください | 符号なし | 8 | 1 | - | 1 = Pset 2 = バッチシーケンス |
11 | 選択番号 | 符号なし | 16 | 1 | - | |
12 | 識別子のダウンロードコマンド | 符号なし | 8 | 1 | - | |
13 | 識別子のダウンロードデータ | 文字列 | 8 | 10;250;30 | - | |
103 | SW バージョン | 符号なし | 8 | 4 | - | a.b.c.d [0] = a [1] = b [2] = c [3] = d |
104 | SW 日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
105 | MAC アドレス | 符号なし | 8 | 6 | - | AA-BB-CC-DD-EE-FF [0] = AA [1] = BB [2] = CC [3] = DD [4] = EE [5] = FF |
106 | シリアル番号 | 文字列 | 8 | 8 | - | |
107 | 製造日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
108 | Licence ID (ライセンスID) | 符号なし | 32 | 1 | - | |
109 | License level (ライセンスレベル) | 符号なし | 8 | 1 | - | 10 =「IAM ワークステーション」 20 =「IAMプロセス」 30 =「IAMオートメーション」 40 =「IAM QA」 |
110 | Date and time (日時) | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
111 | コントローラーのステータス | 符号なし | 8 | 1 | - | 0 =「初期化中」 1 =「準備完了」 2 =「キャリブレーションモード」 |
112 | HW バージョン | 符号なし | 8 | 1 | - | |
120 | アクティブなイベント数 | 符号なし | 8 | 1 | - | |
121 | アクティブなイベントID | 符号なし | 16 | 1 | - | |
122 | アクティブなイベントの重大度 | 符号なし | 8 | 1 | - | 0 =「アクティブなイベントなし」 1 =「情報」 2 =「警告」 3 =「エラー」 |
123 | アクティブなイベントの日時 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
124 | アクティブイベントの文字表示 | 文字列 | 8 | 10;100;30 | - | |
210 | 真空圧力センサー | 浮動 | 32 | 1 | kPa | |
300 | Tool status (ツールのステータス) | 符号なし | 8 | 1 | - | 0 =「存在しない」 1 =「接続済み」 2 =「初期化中」 3 =「準備完了」 4 =「エラー」 |
304 | Tool serial number(ツールシリアル番号) | 文字列 | 8 | 8 | - | |
305 | ツール温度 | 浮動 | 32 | 1 | °C | |
306 | Tool friction at 100 rpm (100 rpmでのツール摩擦) | 浮動 | 32 | 1 | mNm | |
307 | 最大回転数での工具摩擦 | 浮動 | 32 | 1 | mNm | |
401 | リアルタイムトルク | 浮動 | 32 | 1 | mNm | |
402 | リアルタイムのピークトルク | 浮動 | 32 | 1 | mNm | |
403 | リアルタイム角度 | 浮動 | 32 | 1 | ° | |
500 | 選択 PSet | 符号なし | 16 | 1 | - | |
501 | 選択されたバッチシーケンス | 符号なし | 16 | 1 | - | |
502 | Psetステップ数 | 符号なし | 8 | 1 | - | |
503 | Psetステップ番号 | 符号なし | 8 | 1 | - | |
504 | バッチシーケンスのステップ数 | 符号なし | 16 | 1 | - | |
505 | バッチシーケンスのステップ番号 | 符号なし | 16 | 1 | - | |
506 | アクティブなバッチ数 | 符号なし | 16 | 1 | - | |
507 | アクティブなバッチインデックス | 符号なし | 16 | 1 | - | |
600 | Link status (リンクステータス) | 符号なし | 8 | 1 | - | 0 =「停止」 1 =「リンクダウン」 2 =「識別」 3 =「構成済み」 |
602 | IP アドレス | 符号なし | 32 | 1 | - | |
603 | IP サブネットマスク | 符号なし | 32 | 1 | - | |
604 | IPゲートウェイ | 符号なし | 32 | 1 | - | |
800 | ツールサイクル数 | 符号なし | 32 | 1 | - | |
801 | ツールOK数 | 符号なし | 32 | 1 | - | |
802 | ツールNG数 | 符号なし | 32 | 1 | - | |
803 | ツール平均トルク | 浮動 | 32 | 1 | mNm | |
804 | ツール平均温度 | 浮動 | 32 | 1 | °C | |
805 | ツールの平均最大速度 | 浮動 | 32 | 1 | rpm | |
806 | 角度に対するツール平均トルク | 浮動 | 32 | 1 | mNm/° | |
807 | ツールの平均サイクル時間 | 浮動 | 32 | 1 | 秒 | |
820 | ツールの平均サイクル時間 | 符号なし | 32 | 1 | - | |
821 | ツール寿命OKカウント | 符号なし | 32 | 1 | - | |
822 | ツール寿命NGカウント | 符号なし | 32 | 1 | - | |
823 | ツール寿命平均トルク | 浮動 | 32 | 1 | mNm | |
824 | ツール寿命平均温度 | 浮動 | 32 | 1 | °C | |
825 | ツール寿命平均最大速度 | 浮動 | 32 | 1 | rpm | |
826 | 角度に対するツール寿命平均トルク | 浮動 | 32 | 1 | mNm/° | |
827 | ツール寿命平均サイクル期間 | 浮動 | 32 | 1 | 秒 | |
900 | スキャンされたバーコード | 文字列 | 8 | 10;250;30 | - | |
1000 | TNステータス | 符号なし | 8 | 1 | - | 0 =「停止」 1 =「リンクダウン」 2 =「識別」 3 =「構成済み」 |
1001 | TN結果キュー | 符号なし | 32 | 1 | - | |
2000 | DI 1 | ブール値 | 1 | 1 | - | |
2001 | DI 2 | ブール値 | 1 | 1 | - | |
2002 | DI 3 | ブール値 | 1 | 1 | - | |
2003 | DI 4 | ブール値 | 1 | 1 | - | |
2004 | DI 5 | ブール値 | 1 | 1 | - | |
2005 | DI 6 | ブール値 | 1 | 1 | - | |
2006 | DI 7 | ブール値 | 1 | 1 | - | |
2007 | DI 8 | ブール値 | 1 | 1 | - | |
2008 | DI 9 | ブール値 | 1 | 1 | - | |
2009 | DI 10 | ブール値 | 1 | 1 | - | |
2010 | DI 11 | ブール値 | 1 | 1 | - | |
2011 | DI 12 | ブール値 | 1 | 1 | - | |
2012 | 利用不可 | ブール値 | 1 | 1 | - | |
2013 | 利用不可 | ブール値 | 1 | 1 | - | |
2014 | 利用不可 | ブール値 | 1 | 1 | - | |
2015 | 利用不可 | ブール値 | 1 | 1 | - | |
2050 | DI 1 - DI 8 | ブール値 | 1 | 8 | - | 0=2000 1=2001 2=2002 3=2003 4=2004 5=2005 6=2006 7=2007 |
2051 | DI 9 - DI 12 | ブール値 | 1 | 8 | - | 0=2008 1=2009 2=2010 3=2011 |
2100 | DO 1 | ブール値 | 1 | 1 | - | |
2101 | DO 2 | ブール値 | 1 | 1 | - | |
2102 | DO 3 | ブール値 | 1 | 1 | - | |
2103 | DO 4 | ブール値 | 1 | 1 | - | |
2104 | DO 5 | ブール値 | 1 | 1 | - | |
2105 | DO 6 | ブール値 | 1 | 1 | - | |
2106 | DO 7 | ブール値 | 1 | 1 | - | |
2107 | DO 8 | ブール値 | 1 | 1 | - | |
2150 | DO 1 - DO 8 | ブール値 | 1 | 8 | - | 0=2100 1=2101 2=2102 3=2103 4=2104 5=2105 6=2106 7=2107 |
2200 | CF締め付けを開始 | ブール値 | 1 | 1 | - | |
2201 | CF締め付け開始をホールド | ブール値 | 1 | 1 | - | |
2202 | CF緩め操作を開始 | ブール値 | 1 | 1 | - | |
2203 | CF緩め開始をホールド | ブール値 | 1 | 1 | - | |
2204 | CF動作停止 | ブール値 | 1 | 1 | - | |
2205 | CF Reset | ブール値 | 1 | 1 | - | |
2206 | 利用不可 | ブール値 | 1 | 1 | - | |
2207 | CFツール無効化 | ブール値 | 1 | 1 | - | |
2208 | CFツール初期化 | ブール値 | 1 | 1 | - | |
2209 | 利用不可 | ブール値 | 1 | 1 | - | |
2210 | CFイベントの消去 | ブール値 | 1 | 1 | - | |
2211 | CFすべてのイベントの消去 | ブール値 | 1 | 1 | - | |
2212 | 利用不可 | ブール値 | 1 | 1 | - | |
2213 | 利用不可 | ブール値 | 1 | 1 | - | |
2214 | 利用不可 | ブール値 | 1 | 1 | - | |
2215 | 利用不可 | ブール値 | 1 | 1 | - | |
2216 | 利用不可 | ブール値 | 1 | 1 | - | |
2217 | 利用不可 | ブール値 | 1 | 1 | - | |
2218 | 利用不可 | ブール値 | 1 | 1 | - | |
2219 | 利用不可 | ブール値 | 1 | 1 | - | |
2220 | 利用不可 | ブール値 | 1 | 1 | - | |
2221 | CFバッチシーケンスのリセット | ブール値 | 1 | 1 | - | |
2222 | CF増分バッチ | ブール値 | 1 | 1 | - | |
2223 | CF減分バッチ | ブール値 | 1 | 1 | - | |
2224 | CFバッチをリセット | ブール値 | 1 | 1 | - | |
2225 | CFバッチシーケンスDI1 | ブール値 | 1 | 1 | - | |
2226 | CFバッチシーケンスDI2 | ブール値 | 1 | 1 | - | |
2227 | CFバッチシーケンスDI3 | ブール値 | 1 | 1 | - | |
2228 | CFバッチシーケンスDI4 | ブール値 | 1 | 1 | - | |
2229 | CFバッチシーケンスDI5 | ブール値 | 1 | 1 | - | |
2230 | CFバッチシーケンスDI6 | ブール値 | 1 | 1 | - | |
2231 | CFバッチシーケンスDI7 | ブール値 | 1 | 1 | - | |
2232 | CFバッチシーケンスDI8 | ブール値 | 1 | 1 | - | |
2233 | CFバッチシーケンスDI9 | ブール値 | 1 | 1 | - | |
2234 | CFバッチシーケンスDI10 | ブール値 | 1 | 1 | - | |
2235 | CFバッチシーケンスDI11 | ブール値 | 1 | 1 | - | |
2236 | CFバッチシーケンスDI12 | ブール値 | 1 | 1 | - | |
2237 | CFスタンバイ | ブール値 | 1 | 1 | - | |
2238 | CFリブート | ブール値 | 1 | 1 | - | |
2239 | CF増分バッチシーケンス | ブール値 | 1 | 1 | - | |
2240 | 利用不可 | ブール値 | 1 | 1 | - | |
2241 | CF真空を有効にする | ブール値 | 1 | 1 | - | |
2242 | CFクリーニング有効化 | ブール値 | 1 | 1 | - | |
2243 | CFウェイクアップ | ブール値 | 1 | 1 | - | |
2244 | CFツールガイドライト | ブール値 | 1 | 1 | - | |
2245 | CFツールのステータスが赤 | ブール値 | 1 | 1 | - | |
2246 | CFツールのステータスが緑 | ブール値 | 1 | 1 | - | |
2247 | CFツールのステータスが青 | ブール値 | 1 | 1 | - | |
2248 | CFツールのステータスが白 | ブール値 | 1 | 1 | - | |
2249 | CF外部監視 1 | ブール値 | 1 | 1 | - | |
2250 | CF外部監視 2 | ブール値 | 1 | 1 | - | |
2251 | CF外部監視 3 | ブール値 | 1 | 1 | - | |
2252 | CF外部監視 4 | ブール値 | 1 | 1 | - | |
2253 | CF外部監視 5 | ブール値 | 1 | 1 | - | |
2254 | CF外部監視 6 | ブール値 | 1 | 1 | - | |
2255 | CF外部監視 7 | ブール値 | 1 | 1 | - | |
2256 | CF外部監視 8 | ブール値 | 1 | 1 | - | |
2257 | 利用不可 | ブール値 | 1 | 1 | - | |
2258 | 利用不可 | ブール値 | 1 | 1 | - | |
2259 | 利用不可 | ブール値 | 1 | 1 | - | |
2260 | 利用不可 | ブール値 | 1 | 1 | - | |
2261 | 利用不可 | ブール値 | 1 | 1 | - | |
2262 | 利用不可 | ブール値 | 1 | 1 | - | |
2263 | 利用不可 | ブール値 | 1 | 1 | - | |
2264 | CF検証のリセット | ブール値 | 1 | 1 | - | |
2265 | Reserved | ブール値 | 1 | 1 | - | |
2266 | Reserved | ブール値 | 1 | 1 | - | |
2267 | Reserved | ブール値 | 1 | 1 | - | |
2268 | Reserved | ブール値 | 1 | 1 | - | |
2269 | Reserved | ブール値 | 1 | 1 | - | |
2270 | Reserved | ブール値 | 1 | 1 | - | |
2271 | Reserved | ブール値 | 1 | 1 | - | |
2272 | Reserved | ブール値 | 1 | 1 | - | |
2400 | CF 1 - CF 8 | ブール値 | 1 | 8 | - | 0=2200 1=2201 2=2202 3=2203 4=2204 5=2205 7=2207 |
2401 | CF 9 - CF 16 | ブール値 | 1 | 8 | - | 0=2208 2=2210 3=2211 |
2402 | CF 17 - CF 24 | ブール値 | 1 | 8 | - | 5=2221 6=2222 7=2223 |
2403 | CF 25 - CF 32 | ブール値 | 1 | 8 | - | 0=2224 1=2225 2=2226 3=2227 4=2228 5=2229 6=2230 7=2231 |
2404 | CF 33 - CF 40 | ブール値 | 1 | 8 | - | 0=2232 1=2233 2=2234 3=2235 4=2236 5=2237 6=2238 7=2239 |
2405 | CF 41 - CF 48 | ブール値 | 1 | 8 | - | 1=2241 2=2242 3=2243 4=2244 5=2245 6=2246 7=2247 |
2406 | CF 49 - CF 56 | ブール値 | 1 | 8 | - | 0=2248 1=2249 2=2250 3=2251 4=2252 5=2253 6=2254 7=2255 |
2407 | CF 57 - CF 64 | ブール値 | 1 | 8 | - | 0=2256 |
2408 | CF 65 - CF 72 | ブール値 | 1 | 8 | - | 0=2264 |
2500 | RF準備完了 | ブール値 | 1 | 1 | - | |
2501 | RFビジー | ブール値 | 1 | 1 | - | |
2502 | RFエラー | ブール値 | 1 | 1 | - | |
2503 | RF 締め付け OK | ブール値 | 1 | 1 | - | |
2504 | RF 締め付け NOK | ブール値 | 1 | 1 | - | |
2505 | RFバッチ完了 | ブール値 | 1 | 1 | - | |
2506 | RFアクティブイベント | ブール値 | 1 | 1 | - | |
2507 | RFブロッキングイベント | ブール値 | 1 | 1 | - | |
2508 | RF消去可能イベント | ブール値 | 1 | 1 | - | |
2509 | RF初期化ツール | ブール値 | 1 | 1 | - | |
2510 | RFツールが無効です | ブール値 | 1 | 1 | - | |
2511 | RF真空ポンプ | ブール値 | 1 | 1 | - | |
2512 | RFスタート信号 | ブール値 | 1 | 1 | - | |
2513 | RF緩め信号 | ブール値 | 1 | 1 | - | |
2514 | RF「押して始動」信号 | ブール値 | 1 | 1 | - | |
2515 | RFバッチシーケンスDO1 | ブール値 | 1 | 1 | - | |
2516 | RFバッチシーケンスDO2 | ブール値 | 1 | 1 | - | |
2517 | RFバッチシーケンスDO3 | ブール値 | 1 | 1 | - | |
2518 | RFバッチシーケンスDO4 | ブール値 | 1 | 1 | - | |
2519 | RFバッチシーケンスDO5 | ブール値 | 1 | 1 | - | |
2520 | RFバッチシーケンスDO6 | ブール値 | 1 | 1 | - | |
2521 | RFバッチシーケンスDO7 | ブール値 | 1 | 1 | - | |
2522 | RFバッチシーケンスDO8 | ブール値 | 1 | 1 | - | |
2523 | RFバッチ シーケンス完了 | ブール値 | 1 | 1 | - | |
2524 | RFバッチ シーケンスエラー | ブール値 | 1 | 1 | - | |
2525 | RFバッチエラー | ブール値 | 1 | 1 | - | |
2526 | RFスタンバイがアクティブ | ブール値 | 1 | 1 | - | |
2527 | RFネジが位置合わせされていない | ブール値 | 1 | 1 | - | |
2528 | RFネジが位置合わせされている | ブール値 | 1 | 1 | - | |
2529 | RF外部監視 1 | ブール値 | 1 | 1 | - | |
2530 | RF外部監視 2 | ブール値 | 1 | 1 | - | |
2531 | RF外部監視 3 | ブール値 | 1 | 1 | - | |
2532 | RF外部監視 4 | ブール値 | 1 | 1 | - | |
2533 | RF外部監視 5 | ブール値 | 1 | 1 | - | |
2534 | RF外部監視 6 | ブール値 | 1 | 1 | - | |
2535 | RF外部監視 7 | ブール値 | 1 | 1 | - | |
2536 | RF外部監視 8 | ブール値 | 1 | 1 | - | |
2537 | RF外部監視 9 | ブール値 | 1 | 1 | - | |
2538 | RF外部監視 10 | ブール値 | 1 | 1 | - | |
2539 | RF真空クリーニング | ブール値 | 1 | 1 | - | |
2540 | RF接続されている真空ポンプ | ブール値 | 1 | 1 | - | |
2541 | 利用不可 | ブール値 | 1 | 1 | - | |
2542 | 利用不可 | ブール値 | 1 | 1 | - | |
2543 | RF検証完了 | ブール値 | 1 | 1 | - | |
2544 | RF検証がアクティブ | ブール値 | 1 | 1 | - | |
2545 | RFサービスが必要 | ブール値 | 1 | 1 | - | |
2546 | RFバッテリ接続済み | ブール値 | 1 | 1 | - | |
2547 | RFバッテリ残量が低 | ブール値 | 1 | 1 | - | |
2548 | RF 検証 OK | ブール値 | 1 | 1 | - | |
2549 | RF 検証 NOK | ブール値 | 1 | 1 | - | |
2550 | Reserved | ブール値 | 1 | 1 | - | |
2551 | Reserved | ブール値 | 1 | 1 | - | |
2552 | Reserved | ブール値 | 1 | 1 | - | |
2553 | Reserved | ブール値 | 1 | 1 | - | |
2554 | Reserved | ブール値 | 1 | 1 | - | |
2555 | Reserved | ブール値 | 1 | 1 | - | |
2556 | Reserved | ブール値 | 1 | 1 | - | |
2557 | Reserved | ブール値 | 1 | 1 | - | |
2558 | Reserved | ブール値 | 1 | 1 | - | |
2559 | Reserved | ブール値 | 1 | 1 | - | |
2560 | Reserved | ブール値 | 1 | 1 | - | |
2561 | Reserved | ブール値 | 1 | 1 | - | |
2562 | Reserved | ブール値 | 1 | 1 | - | |
2563 | Reserved | ブール値 | 1 | 1 | - | |
2700 | RF 1 - RF 8 | ブール値 | 1 | 8 | - | 0=2500 1=2501 2=2502 3=2503 4=2504 5=2505 6=2506 7=2507 |
2701 | RF 9 - RF 16 | ブール値 | 1 | 8 | - | 0=2508 1=2509 2=2510 3=2511 4=2512 5=2513 6=2514 7=2515 |
2702 | RF 17 - RF 24 | ブール値 | 1 | 8 | - | 0=2516 1=2517 2=2518 3=2519 4=2520 5=2521 6=2522 7=2523 |
2703 | RF 25 - RF 32 | ブール値 | 1 | 8 | - | 0=2524 1=2525 2=2526 3=2527 4=2528 5=2529 6=2530 7=2531 |
2704 | RF 33 - RF 40 | ブール値 | 1 | 8 | - | 0=2532 1=2533 2=2534 3=2535 4=2536 5=2537 6=2538 7=2539 |
2705 | RF 41 - RF 48 | ブール値 | 1 | 8 | - | 0=2540 3=2543 4=2544 5=2545 6=2546 7=2547 |
2706 | RF 49 - RF 56 | ブール値 | 1 | 8 | - | 0=2548 1=2549 |
2707 | RF 57 - RF 64 | ブール値 | 1 | 8 | - | |
2708 | RF外部監視 1~8 | ブール値 | 1 | 8 | - | 0=2529 1=2530 2=2531 3=2532 4=2533 5=2534 6=2535 7=2536 |
2709 | RF外部監視 9~10 | ブール値 | 1 | 8 | - | 0=2537 1=2538 |
3000 | 結果識別子 | 符号なし | 32 | 1 | - | |
3001 | 結果タイプ | 符号なし | 8 | 1 | - | 1 =「締め付け」 2 =「緩め」 |
3002 | 結果コード | 符号なし | 8 | 1 | - | 1 = 「OK」 2 = 「キャンセル」 3 = 「NG」 |
3003 | 結果 締付け開始時間 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
3004 | 結果エラーのステップ番号 | 符号なし | 8 | 1 | - | |
3005 | 結果エラーコード | 符号なし | 8 | 1 | - | 1 =「エラーなし」 2 =「値が高い(エラー値を参照)」 3 =「値が低い(エラー値を参照)」 4 = 「トリガ喪失」 5 = 「ビットスリップ検出」 6 = 「リヒット検出」 7 =「着座が検出されていません」 8 = 「損傷したスレッド」 9 = 「トルクの無効化中」 |
3006 | 結果のエラー値 | 符号なし | 8 | 1 | - | 1 =「なし」 2 =「グローバルタイム」 3 = 「ステップ時間」 4 = 「トルク」 5 = 「ステップ角」 6 = 「合計角」 7 = 「クランプトルク」 8 = 「クランプ角度」 9 = 「締め付け角度」 |
3007 | 結果コントローラのシリアル番号 | 文字列 | 8 | 8 | - | |
3008 | 結果コントローラー名 | 文字列 | 8 | 10;90;90 | - | |
3009 | 結果コントローラーID | 符号なし | 32 | 1 | - | |
3010 | 結果ステーション名 | 文字列 | 8 | 10;90;90 | - | |
3011 | 結果ステーションID | 符号なし | 32 | 1 | - | |
3012 | 結果ライン名 | 文字列 | 8 | 10;90;90 | - | |
3013 | 結果ラインID | 符号なし | 32 | 1 | - | |
3014 | 結果ツールシリアル番号 | 文字列 | 8 | 8 | - | |
3015 | 結果ツール名 | 文字列 | 8 | 10;30;30 | - | |
3016 | 結果pset番号 | 符号なし | 16 | 1 | - | |
3017 | 結果pset名 | 文字列 | 8 | 10;90;90 | - | |
3018 | 結果psetリビジョン | 符号なし | 32 | 1 | - | |
3019 | 結果pset作成日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
3020 | 結果pset変更日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
3021 | 結果バッチシーケンス番号 | 符号なし | 16 | 1 | - | |
3022 | 結果バッチシーケンス名 | 文字列 | 8 | 10;90;90 | - | |
3023 | 結果バッチシーケンスリビジョン | 符号なし | 32 | 1 | - | |
3024 | 結果バッチシーケンスの作成日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
3025 | 結果バッチシーケンスの変更日 | 文字列 | 8 | 19 | - | YYYY-MM-DDThh:mm:ss 2000~2099間の有効な日付 |
3026 | 結果のバッチシーケンスのステップ数 | 符号なし | 16 | 1 | - | |
3027 | 結果バッチシーケンスのステップ番号 | 符号なし | 16 | 1 | - | |
3028 | 結果のバッチサイズ | 符号なし | 8 | 1 | - | |
3029 | 結果バッチ数 | 符号なし | 8 | 1 | - | |
3030 | 結果ピークトルク | 浮動 | 32 | 1 | mNm | |
3031 | 結果の合計角度 | 浮動 | 32 | 1 | ° | |
3032 | 結果の合計期間 | 浮動 | 32 | 1 | 秒 | |
3033 | 結果ツール温度 | 浮動 | 32 | 1 | °C | |
3034 | 結果の合計角度ステータス | 符号なし | 8 | 1 | - | 1 = 「OK」 2 =「低」 3 =「高」 |
3035 | 結果合計時間ステータス | 符号なし | 8 | 1 | - | 1 = 「OK」 2 =「低」 3 =「高」 |
3036 | 結果最終トルクタイプ | 符号なし | 8 | 1 | - | 1 =「ピーク」 2 =「クランプ」 3 =「最終」 |
3037 | 最終トルク | 浮動 | 32 | 1 | mNm | |
3038 | 結果最終角度 | 浮動 | 32 | 1 | ° | |
3039 | 結果最終角度タイプ | 符号なし | 8 | 1 | - | 1 = 「ステップ」 2 =「クランプ」 3 =「締め付け」 |
3040 | 結果の最終報告ステップ | 符号なし | 8 | 1 | - | |
3041 | 結果最終トルクステータス | 符号なし | 8 | 1 | - | 0 = 「」 1 = 「OK」 2 =「低」 3 =「高」 |
3042 | 結果最終角度ステータス | 符号なし | 8 | 1 | - | 0 = 「」 1 = 「OK」 2 =「低」 3 =「高」 |
3043 | 結果トルク調整 | 浮動 | 32 | 1 | % | |
3044 | 結果のカスタム識別子キー1 | 文字列 | 8 | 8;48;48 | - | |
3045 | 結果のカスタム識別子の値1 | 文字列 | 8 | 10;100;100 | - | |
3046 | 結果のカスタム識別子キー2 | 文字列 | 8 | 8;48;48 | - | |
3047 | 結果のカスタム識別子の値2 | 文字列 | 8 | 10;100;100 | - | |
3048 | 結果のカスタム識別子キー3 | 文字列 | 8 | 8;48;48 | - | |
3049 | 結果のカスタム識別子の値3 | 文字列 | 8 | 10;100;100 | - | |
3050 | 結果のカスタム識別子キー4 | 文字列 | 8 | 8;48;48 | - | |
3051 | 結果のカスタム識別子の値4 | 文字列 | 8 | 10;100;100 | - | |
3052 | 結果ピックアップの試行 | 符号なし | 16 | 1 | - | |
3053 | 結果の総ピックアップ時間 | 浮動 | 32 | 1 | 秒 | |
3054 | 結果バッチねじ番号 | 符号なし | 8 | 1 | - | |
3055 | 結果の最終最大トルク制限 | 浮動 | 32 | 1 | mNm | |
3056 | 結果の最終最小トルク制限 | 浮動 | 32 | 1 | mNm | |
3057 | 結果の最終最小トルク制限 | 浮動 | 32 | 1 | ° | |
3058 | 結果の最終最小角度制限 | 浮動 | 32 | 1 | ° | |
3059 | 結果の最終着座ポイント | 浮動 | 32 | 1 | mNm | |
3060 | 結果位置合わせされていない限界 | 浮動 | 32 | 1 | kPa | |
3061 | 結果位置合わせ限界 | 浮動 | 32 | 1 | kPa | |
3062 | 結果位置合わせされていないステータス | 符号なし | 8 | 1 | - | 1 = 「OK」 2 =「低」 |
3063 | 結果位置合わせステータス | 符号なし | 8 | 1 | - | 1 = 「OK」 2 =「低」 |
3064 | 結果のpsetタイプ | 符号なし | 8 | 1 | - | 0 = 「PSet」 1 = 「検証プログラム」 |
3065 | 結果検証サイズ | 符号なし | 8 | 1 | - | |
3066 | 結果検証数 | 符号なし | 8 | 1 | - | |
3067 | 結果ツールの校正日 | 文字列 | 8 | 19 | - | YYYY-MMDDThh: mm: ss 2000~2099間の有効な日付 |
3068 | 結果ツール構成リビジョン | 符号なし | 32 | 1 | - | |
3069 | 結果ツールトルクタイプ | 符号なし | 8 | 1 | - | 0 = 「不明」 1 = 「電流」 2 = 「トランスデューサー」 |
3070 | 結果ステップ範囲角度 | 浮動 | 32 | 1 | 角度 | |
3071 | 結果ステップ範囲角度ステータス | 符号なし | 8 | 1 | - | |
3072 | 結果ステップ範囲角度開始ステップ | 符号なし | 8 | 1 | - | |
3073 | 結果ステップ範囲角度停止ステップ | 符号なし | 8 | 1 | - |