スマート嵌合いステップ
スマート嵌合いは、通常低回転数 (100~150 rpm)で、ネジの嵌合いを容易にするのに使用されます。スマート噛み合いでは、まず噛み合いトルクに達し、次に設定された検証角度範囲内で、最大トルクを下回り、かつ噛み合いトルクを超える必要があります。検証角度範囲と締め付けステップ角度の間のトルクを監視することにより、ステップでねじの傾きとねじの欠落を即座に検出できます。
設定された噛み合いトルクに達すると、可能な噛み合いがトリガーされます。噛み合いトルクに達した後、コントローラーは設定された検証角度範囲でのトルクを監視して、ネジが正しく噛み合っていることを確認します。締め付けが最大トルクまたは最大角度に達すると、再試行アクションがトリガーされます。再試行アクションは、再試行または中止のいずれかで構成されます。ユーザーは、さまざまなエラーに応じて締付けがどのように作動するかを定義できます。最大トルクが原因で再試行アクションがトリガーされた場合は、ねじが傾いていることが原因である可能性が高いため、再試行アクションとしては再試行が推奨されます。
最大角度が原因で再試行アクションがトリガーされた場合、エラーはネジの欠落によって引き起こされた可能性が高いため、再試行アクションとしては中止が推奨されます。
速度 | ツール速度は有効範囲内で設定することができます。 |
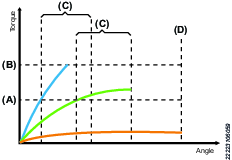
嵌合トルク (A) | 嵌合トルクに達した後に検証角度を有効にします。 |
検証角度 (C) | 指定された角度でのトルクを監視して、トルクが嵌合トルクを上回り、かつ最大トルクを下回っていることを確認します。これらの要件が満たされると、ステップは完了します。 |
再試行アクション |
|
緩め角法 |
|
緩め角度 | 再試行に使用されるユーザー定義の角度。 |
緩めトルク | 緩め時の最大トルク。 |
緩め速度 | 再試行がトリガーされた場合の緩め速度。 |
向き | 時計回りまたは反時計回りの締め付け方向。通常の締め付けでは、時計回りの設定を使用します |
再試行信号 | 再試行中、ツールが緩めを行っている場合に、どの外部監視入力をアクティブにするかを定義します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
最大トルク (B) | 最大トルクに達すると、再試行アクションがトリガーされます。 |
最大角度 (D) | 最大角度に達すると、再試行アクションがトリガーされます。 |
再試行制限 | 再試行アクションが実行された後、締め付けがネジの締め直しを試みる回数。 |
ステップ開始遅延 | トリガからツール始動までの遅延時間。 |
最小ステップ時間 | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します |
最大ステップ時間 | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |









































