摩擦制御ステップ
摩擦制御ステップは、ランダウン段階で平均トルク (摩擦) を測定できる、角度ステップのスマートなバージョンです。目標摩擦制御角度に達すると、ステップは終了します。平均トルクが平均トルク制限内にない場合、ステップは失敗します。トルクが最大/最小トルク制限を上回ったり下回ったりした場合でも、締め付けは中止されます。
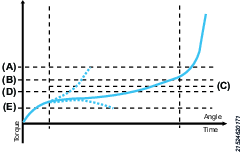
A | Max. torque (最大トルク) |
B | 最大平均トルク |
C | 平均トルク |
D | 最小平均トルク |
E | Min. torque (最小トルク) |
パラメーター | 説明 |
速度 | ツール速度は有効範囲内で設定することができます。 |
摩擦制御角度 | ステップを正常に完了するために達しなければならない角度。 |
向き | 時計回りまたは反時計回りの締め付け方向。通常の締め付けでは、時計回りの設定を使用します。 |
真空が有効 | 外部真空ポンプをONにするデジタル出力。 |
高速速度変更 | 高速と低速間を速く変更できるようにします。有効にすると、長期的に現在制御されているツールのトルク推定がより正確になります。これは、現在のステップから次のステップへの移行時に適用されます。 |
最小トルク(E) | ステップ中、トルクは設定した最小トルクを下回ってはなりません。トルクが最小トルクより低くなった場合、ドライバが停止し、コントローラがエラーメッセージを表示します。 |
Max. torque (A)(最大トルク (A)) | このステップ中は、トルクが最大トルク値を超えないことが必要です。最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
最小平均トルク (D) | ステップ終了時のステップの最小平均トルク値です。ステップ終了時に最小平均トルクに達しなかった場合、締め付けは中止され、結果は NG になります。 |
最大平均トルク(B) | ステップ終了時のステップの最大平均トルク値です。ステップ終了時に最大平均トルクを超えた場合、締め付けは中止され、結果は NG になります。 |
ステップ開始遅延 | トリガからツール始動までの遅延時間。 |
最小ステップ時間 | ステップの最小時間の設定。これに達しない場合、コントローラがエラーメッセージを表示します。 |
最大ステップ時間 | ステップの最大時間の設定。これを超過した場合、コントローラがエラーメッセージを表示します。 |









































