スマートトルク着座モニタリング(スマートTSM)
スマートトルク着座モニタリングステップは、トルクステップのスマートなバージョンで、まったく新しい着座検出アルゴリズムを採用しています。スマートTSMは、ねじを目的の目標トルクに締め付け、ねじが着座したかどうかも監視します。着座していない場合、ネジが浮いていると、NG 着座が検出されなかったと報告します。コントローラは、着座検出を計算するために、推定クランプトルクとクランプ角度を知る必要があります。締め付け中にトルク勾配が低くなりすぎると、検出された着座点が拒否される可能性があります。その後、誤った着座ポイントと見なされ、引き続き別の着座ポイントを探し続けます。
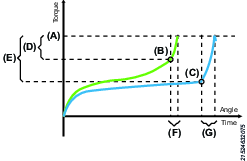
A | 目標トルク |
B | Seating point(シーティングポイント) |
C | Seating point(シーティングポイント) |
D | クランプトルク |
E | クランプトルク |
F | クランプ角 |
G | クランプ角 |
速度 | ツール速度は有効範囲内で設定することができます。 |
目標トルク | ジョイントの目標トルク。 |
クランプトルク | 締め付け時の予想されたクランプトルクです。 |
クランプ角 | 締め付けに予想されるクランプ角度です。 |
Vacuum enabled(真空が有効) | 外部真空ポンプをONにするデジタル出力。 |
Min. torque (最小トルク) | ステップ終了時に最小トルクに達しなかった場合は、エラーメッセージが表示されます。 |
Max. torque (最大トルク) | ステップが終了する前に最大トルクに達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Rescinding torque limit(トルク限度の解除) | このモニタパラメータはこのステップでトルクの下限を設定します。トルクがいかなる時でもこの下限を下回ると締め付けが停止しエラーメッセージが表示されます。このパラメーラーを0に設定するとトルク限度の解除を無効にします。 |
Min. angle (最小角) | ステップ終了時に最小角度に達しなかった場合は、エラーメッセージが表示されます。 |
Max. angle (最大角) | ステップが終了する前に最大角度に達すると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp torque (最小クランプトルク) | 最小クランプトルクは、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp torque (最大クランプトルク) | 最大クランプトルクは、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Min. clamp angle (最小クランプ角) | 最小クランプ角度は、ジョイントの異常を検出するのに使用することができます。角度が最小クランプ角より小さければ、コントローラがエラーメッセージを表示します。 |
Max. clamp angle (最大クランプ角) | 最大クランプ角度は、ジョイントの異常を検出するのに使用することができます。最大を超えると、ツールが停止し、コントローラがエラーメッセージを表示します。 |
Step start delay (ステップ開始遅延) | トリガからツール始動までの遅延時間。 |
Min. step time (最小ステップ時間) | ステップの最短時間。これに達しない場合、コントローラがエラーメッセージを表示します。 |
Max. step time (最大ステップ時間) | ステップの最長時間。これを超過した場合、コントローラがエラーメッセージを表示します。 |









































