多步骤步骤
名称
必要时可重命名每个步骤。
旋转方向
每个拧紧步骤可正向运行,即:拧紧,或反向运行,即:将螺钉拧松一点。箭头指出该方向。很多拧紧步骤都有一个硬编码为正向的方向,如:拧紧以达到目标角度,或拧紧以达到目标扭矩。拧松以达到目标角度或拧松以达到目标扭矩等步骤的方向均自动被设为反向。
步骤类别
每个步骤都有一个选项来选择步骤类别。通过选择步骤类别,NOK 拧紧将在事件结果视图中列出,同时列出相关的详细状态以及对应的多步骤错误信息。如果没有做出选择,详细状态将被设为“未分类的多步骤错误”。相关详细状态可以自定义。
角度窗口
如果螺钉被拧紧至满扭矩,以及当它被拧紧至贴合点后旋转 30 度(或更小)时,连接将被视为硬连接。软连接是指拧紧至贴合点后旋转 720 度或更大角度。硬度参数定义变化率计算的角度窗口。连接越硬,角度窗口越小。
速度上升/加速(仅适用于 ToolsTalk 2)
对于大部分步骤,可指定要达到目标速度应如何加速。可以有三种不同的设置:硬、软和手动。当步骤开始时,将使用定义的加速度。如果工具在步骤开始时已经以某种速度运行也不要紧,不管怎样,上升将被用于加速到步骤的目标速度。即使步骤开始时的速度高于或低于目标速度,情况也是如此。
速度上升 - 硬和软模式:
加速度 | 速度上升已使用 |
|---|---|
硬 | 2000 rpm/s(1000 到 10000 rpm/s 之间的速度上升为硬加速。) |
软 | 500 rpm/s(200 到 1000 rpm/s 之间的速度上升为软加速。) |
速度上升 - 手动模式:
参数 | 默认值 | 最小限值 | 最大限值 |
|---|---|---|---|
速度 | 60 rpm | 必须 > 0 | 必须 <= 工具最大速度 |
加速度 | 500 rpm/s | 必须 > 0 | 必须 <= 工具最大加速度 |
使用变速
您可以在速度将发生变化的步骤中定义 1-5 个角度触发器或扭矩触发器。
在一个步骤内,所有变速触发器都是基于同一个属性,即扭矩或角度。它们不能在一个步骤内混合。
添加变速:
在可能有变速的步骤的配置区域,点击添加变速并选择一个角度范围或扭矩范围。变速角度/扭矩字段打开。
根据下表添加值。
参数 | 说明 |
|---|---|
角度/扭矩触发器 | 必须 > 0。 |
速度 | 必须 > 0。 |
速度上升类型 | 硬或软。 |
扭矩触发器和角度触发器必须小于步骤目标,具体取决于步骤类型和触发器类型。
扭矩触发器和扭矩速度也会针对 工具的最大扭矩和最大速度进行验证。只要变速设置超出工具最大值或步骤最大值就会出现警告或错误指示。
拧紧程序出现警告可以将设置推送至控制器,但是拧紧程序出现错误指示时不能推送。
控制制动行为(人体工学停止/惯性)
多步骤拧紧程序的制动行为可在程序中的两个可能位置进行控制:在拧紧方向反转之前的步骤中,和/或在拧紧程序的最后一步。在多步骤程序的其他位置,步骤的常规设置中将不提供制动参数。制动可被设为人体工学停止或惯性。惯性将完全制动工具,而人体工学停止将允许更加符合人体工学的减速拧紧。
要设置制动类型,请进入步骤设置,并将制动配置下拉菜单设置为人体工学停止或惯性。惯性没有其他参数。
人体工学停止参数
参数 | 说明 |
|---|---|
自适应制动 | 将自适应制动设置为开启或关闭 |
上升时间 | 仅在自适应制动设置为关闭时可用。以 ms 为单位插入时间。 |
各步骤列表
C - 离合器
该步骤将以编程好的速度正向运行工具,直到离合器释放。当工具报告离合器的释放时,步骤将以 OK 状态完成。
使用离合器步骤的拧紧程序不能分配任何其他步骤。
该步骤仅对离合器工具 BCV-RE 和 BCP-RE 有效。
参数 | 说明 |
|---|---|
名称 | 步骤名称的字母数字值 |
步骤类别 | 可选择拧紧阶段的选项列表[无、软启动、旋入、第一、最后] |
速度控制 | 一速或两速 |
最终速度 | 设置程序的最终速度 [rpm] |
速度上升 | 可选择速度上升的开关[硬、软] |
重复拧紧 | 重复拧紧设置为开或关 |
重复拧紧角度 | 设置重复拧紧角度 [°] |
CL - 离合器拧松
该步骤将以编程好的速度反向运行工具,直到工具触发器释放。
使用离合器步骤的拧松程序不能分配任何其他步骤。
该步骤仅对离合器工具 BCV-RE 和 BCP-RE 有效。
参数 | 说明 |
|---|---|
名称 | 步骤名称的字母数字值 |
步骤类别 | 可选择拧紧阶段的选项列表[无、软启动、旋入、第一、最后] |
最终 | 设置程序的速度 [rpm] |
W – 等待
工具等待一段指定的时间。如果保持位置被设为开启,在时间目标期间,工具位置将保持不动。
SR – 松开套筒
该步骤反向运行工具直至达到目标角度。目标角度从步骤开始时测量。
该步骤只能作为多步骤拧紧程序的拧紧路径中的最后一步。
DI – 运行至数字输入为止
该步骤将运行工具直至接收到数字输入信号。选择用来停止工具的数字输入和停止条件:下降沿、上升沿、任意沿、信号低或信号高。
A – 拧紧以达到目标角度/拧松以达到目标角度
该步骤运行工具直至达到目标角度。目标角度从步骤开始时测量,必须设为 > 0。
TrR – 拧松以释放触发器
该步骤运行至工具触发器被释放(拧松)为止。它只能用作程序的最后一步。
参数 | 说明 |
|---|---|
名称 | 步骤名称的字母数字值 |
步骤类别 | 可选择拧紧阶段的选项列表[无、软启动、旋入、第一、最后] |
速度 | 转速的数值;以 rpm 为单位。 |
速度上升类型 | 可选择速度上升的选项列表[硬、软、手动] |
仅限 STB 工具。
TTTR – 拧紧以释放触发器
该步骤运行至工具触发器被释放(拧紧)为止。它只能用作程序的最后一步。
参数 | 说明 |
|---|---|
名称 | 步骤名称的字母数字值 |
步骤类别 | 可选择拧紧阶段的选项列表[无、软启动、旋入、第一、最后] |
速度 | 转速的数值;以 rpm 为单位。 |
速度上升类型 | 可选择速度上升的选项列表[硬、软、手动] |
仅限 STB 工具。
T – 拧紧以达到目标扭矩/拧松以达到目标扭矩
该步骤运行工具直至达到目标扭矩。正向拧紧,反向拧松。目标扭矩必须设为 > 0。如要激活拧松以达到目标扭矩,扭矩必须先超过目标的 110%。
T+A – 拧紧以达到目标扭矩与角度
该步骤运行工具直至达到目标扭矩。它将从这一点继续运行一个附加的目标角度。目标扭矩和目标角度必须设为 > 0。
T|A – 拧紧以达到目标扭矩或角度
工具将运行直至达到目标扭矩或目标角度为止,以先达到的目标为准。目标扭矩和目标角度必须设为 > 0。
T&A – 拧紧达到目标扭矩和角度
工具将运行直至达到目标扭矩和目标角度为止。目标扭矩和目标角度必须设为 > 0。
DT – 拧紧至 DynaTork
该步骤运行工具直至达到目标扭矩。然后,工具将在 DynaTork 时间期间以目标扭矩的 DynaTork 百分比保持电流恒定。
为避免工具过热,强烈建议不要运行 DynaTork 超过工具最大扭矩的 40%。
Y – 根据屈服度拧紧
该策略正向运行工具直至检测到屈服点为止。通过从扭矩超过触发扭矩水平时监控扭矩变化率来找到屈服点,触发扭矩水平根据扭矩和角度距离测量求出。角度距离参数根据指定连接硬度设置。
设置变化率角度窗口(用于硬连接、软连接或角度窗口的手动设置)。如果选择了手动,必须设置角度窗口。如果螺钉被拧紧至满扭矩,以及当它被拧紧至贴合点后旋转 30 度(或更小)时,连接将被视为硬连接。软连接是指拧紧至贴合点后旋转 720 度或更大角度。硬度参数定义变化率计算的角度窗口。连接越硬,角度窗口越小。
YM2 – 拧紧至屈服(方法 2)
该策略正向运行工具直至检测到屈服点为止。当扭矩达到触发器扭矩 (Tt) 时,搜索屈服点,然后计算过滤角度 (Af) 上的扭矩平均值。根据样本数量,参考 (Nrs) 设置重复该程序。依据样本数量,参考点使用线性回归方程计算参考斜率。然后,依据过滤角度度数连续计算新的平均值。依据样本数量 (Ns) 平均点使用线性回归方程计算实际斜率。当斜率小于参考斜率的屈服点百分比 (Py) 时,达到屈服点。
ThCT – 切割螺纹以达到目标扭矩
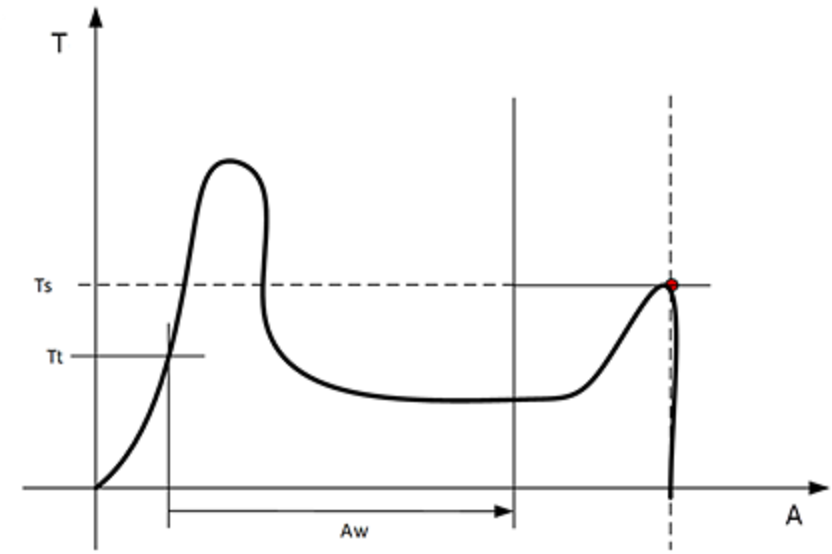
切割螺纹以达到目标扭矩功能可在所需的旋入扭矩大于旋入完成扭矩时启用拧紧,例如,当使用自攻螺纹(或自攻)螺钉拧紧金属薄层时。工具正向运行直至达到螺纹切割角度 (Aw)。当扭矩第一次超过螺纹切割触发扭矩 (Ttc) 时测量螺纹切割角度窗口。步骤从达到螺纹切割角度的点继续运行,直至达到目标扭矩 (Tt)。
T = 扭矩,A = 角度
RD – 旋入
旋入步骤是拧紧的组成部分,该阶段从螺钉进入螺纹时开始,直到螺钉头刚好接触底面并达到贴合点为止。旋入期间所需的扭矩不会影响任何夹紧力。
该步骤正向运行工具,在指定的目标扭矩或贴合状态下停止。如果选择旋入至贴合状态,必须设置触发扭矩、角度增量和扭矩斜率参数。
E – 啮合
该步骤以两个方向运行工具,直到套筒与螺钉啮合为止。假如如果不啮合则继续被设为是的话,继续该步骤直至达到目标扭矩或目标角度。如果在任意方向达到目标角度,方向被反转。通过输入最大啮合尝试次数限制搜索迭代。如果在任意方向达到目标扭矩,步骤将以 OK 状态完成。
Ext - 外部结果
外部结果是在通过外部数字信号(而非通过拧紧期间测得的扭矩或角度值)显示拧紧完成时使用的策略。外部信号可以通过可向 Power Focus 6000 提供数字信号的任意方式提供(如通过 I/O 总线)。
在发送信号时,结果视图(存入的数据)将显示在拧紧程序中提供的目标参数值(规定的扭矩值、角度值或文本字符串)。这些(扭矩和角度)值不代表实际的测量值,而仅是插入的文本。
参数 | 说明 |
|---|---|
扭矩 <目标扭矩> | 所需显示目标扭矩值的数值。比如,信号可以来自 Click Wrench 并显示 <目标扭矩>。 |
角度 <目标角度> | 所需显示目标角度值的数值。比如,信号可以来自 Click Wrench 并显示 <目标角度>。 |
文本 | 所需显示文本的字母数字字符串。例如:“已换油”。 |
MWR - 机电扳手
机电扳手是一个专门步骤,只能与机电扳手 (MWR) 一起使用。
此步骤不能与其他步骤结合使用。此步骤不能使用任何限制。默认情况下,该步骤有三个监视器:峰值扭矩、角度和咔哒声。
参数 | 说明 |
|---|---|
名称 | 用于命名步骤的字母数字字符串。 |
松开限值 | 负扭矩(即拧松方向上的扭矩)的数值,此时拧紧结果标记为 NOK(拧紧方向错误(拧松));单位为 Nm。 |
工具尺寸 | 安装在 MWR-TA 上的特定长度端部配件工具的数值;单位为 mm。 |
工具弯曲 | 安装在 MWR-TA 上的端部配件工具的数值;单位为 °/Nm。 |
重复拧紧角度窗口 | 确定达到扭矩时螺钉是否已拧紧的角度值;单位为 °。 |
最大角速率 | 可拧紧螺钉的最大速率值;单位为 °/s。 |
同步点 - 仅在 Step Sync 控制器上可用。
如要在步骤同步设置中的不同工具之间进行同步,需使用同步点。在这些工具中,工具将在继续拧紧程序的下一步之前等待彼此。可以根据需要将同步点手动添加到拧紧程序,也可以通过选中复选框自动添加。









































