マルチステップのステップ
名前
必要に応じて各ステップの名前を変更できます。
回転方向
各締め付けステップは、前方 (ネジを締め付ける) または後方 (ネジを少し緩める) のいずれかで実行できます。矢印がこの方向を示します。角度に合わせて締め付け、トルクに合わせて締め付けなど、多くの締め付けステップには方向が前方にハードコードされています。角度に合わせて緩めやトルクに合わせて緩めなどのステップでは、方向が後方(逆方向)に自動的に設定されます。
ステップカテゴリ
各ステップに、ステップカテゴリを選択するオプションがあります。ステップカテゴリを選択すると、NG 締め付けが、関連する詳細ステータスと該当するマルチステップエラー情報を示してイベント結果ビューにリスト表示されます。選択しないと、削除されたステータスは「未分類マルチステップエラー」に設定されます。関連する削除されたステータスは分類できます。
角度ウィンドウ
ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
速度ランプ/加速(ToolsTalk 2でのみ使用可能)
ほとんどのステップで、目標速度までの加速を達成する方法を指定できます。ハード、ソフト、手動の 3 つの設定が指定できます。ステップが開始されるたびに、定義された加速が使用されます。ツールがステップの開始時に異なる速度ですでに作動していても、これに関わらずランプが使用され、ステップの目標速度まで加速されます。ステップの開始時の速度が目標速度より速い場合または遅い場合でも、同様となります。
速度ランプ - ハードおよびソフトモード:
加速 | 使用される速度ランプ |
|---|---|
ハード | 2000 rpm/s (1000 ~ 10000 rpm/s の速度ランプはハード加速。) |
ソフト | 500 rpm/s (200 ~ 1000 rpm/s の速度ランプはソフト加速。) |
速度ランプ - 手動モード:
パラメータ | デフォルト値 | 最小限度 | 最大限度 |
|---|---|---|---|
速度 | 60 rpm | > 0 であること | ツール最大速度以下であること |
加速 | 500 rpm/s | > 0 であること | ツール最大加速以下であること |
スピードシフトの使用
ステップ中に速度が変わる、角度トリガまたはトルクトリガを1~5個定義できます。
1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。
スピードシフトを追加するには:
スピードシフトが使用できるステップの構成エリアで、スピードシフトの追加をクリックして、角度範囲またはトルク範囲を選択します。スピードシフトの角度/トルクのフィールドが開きます。
以下の表に従って値を追加します。
パラメータ | 説明 |
|---|---|
Angle/Torque trigger (角度/トルクトリガ) | > 0 であること。 |
速度 | > 0 であること。 |
速度ランプタイプ | ハードまたはソフト。 |
トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。
トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。
締め付けプログラムに警告が示されるとコントローラーに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。
制動動作の制御(エルゴ停止/慣性)
マルチステップ締め付けプログラムの制動動作は、プログラムの2つの場所で制御することができます。締め付け方向の逆転に先行するステップ、および/または締め付けプログラムの最終ステップの2つの場所です。マルチステッププログラムの他の場所において、ステップの一般設定では制動パラメータは使用できません。制動はエルゴ停止または 慣性のいずれかに設定できます。エルゴ停止 はより人間工学的な締め付けの減速を可能にする一方、慣性 は工具を完全に制動します。
制動のタイプを設定するには、ステップの設定に入り、制動の構成のドロップダウンをエルゴ停止または 慣性に設定します。慣性には追加パラメータはありません。
エルゴ停止パラメータ
パラメータ | 説明 |
|---|---|
適合型制動 | 適合型制動をオンまたはオフに設定します |
ランプ時間 | 適合型制動がオフに設定されている場合にのみ使用できます。時間をms(ミリ秒)で挿入します。 |
個々のステップのリスト
Cクラッチ
このステップでは、クラッチが解放されるまで、プログラムされた速度を順方向に実行します。工具がクラッチの解放を報告すると、ステップはOKステータスで終了します。
クラッチステップを使用する締め付けプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
名前 | ステップ名の英数字の値 |
ステップカテゴリ | 締め付けの段階を選択できるオプションのリスト[なし、ソフトスタート、ランダウン、最初、最後] |
スピードコントロール | 一速または二速 |
最終速度 | プログラムの最終速度を設定します[rpm] |
速度ランプ | 速度ランプを選択できるスイッチ[ハード、ソフト] |
リヒット | リヒット検出をオンまたはオフに設定します |
リヒット角度 | リヒット角度を設定します[°] |
CLクラッチ緩め
このステップでは、ツールのトリガが解除されるまで、プログラムされた速度で逆方向にツールを実行します。
クラッチステップを使用する緩めプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
名前 | ステップ名の英数字の値 |
ステップカテゴリ | 締め付けの段階を選択できるオプションのリスト[なし、ソフトスタート、ランダウン、最初、最後] |
最終 | プログラムの速度を設定します[rpm] |
W – 待機
ツールが指定された時間待機します。保持位置がオンに設定されている場合、ツールは時間目標中その位置を保持します。
SR - ソケット解除
このステップでは、目標角度に達するまでツールが逆方向に作動します。目標角度は、ステップの開始から測定されます。
マルチステップ締め付けプログラムの締め付けパスの最後のステップとしてのみ、このステップの使用は許可されています。
DI – デジタル入力まで実行
このステップでは、デジタル入力を受信するまでツールが作動します。ツールを停止するデジタル入力と、停止状態を、立ち下がりエッジ、立ち上がりエッジ、任意のエッジ、信号低、信号高から選択します。
A – 角度に合わせて締め付け/角度に合わせて緩め
このステップでは、目標角度に達するまでツールが作動します。目標角度は、ステップの開始から測定され、0 より大きい数値に設定される必要があります。
TrR – トリガーリリースに合わせて緩め
このステップは、ツールトリガが解除される(緩められる)まで作動します。これは、プログラムの最後のステップとしてのみ使用できます。
パラメータ | 説明 |
|---|---|
名前 | ステップ名の英数字の値 |
ステップカテゴリ | 締め付けの段階を選択できるオプションのリスト[なし、ソフトスタート、ランダウン、最初、最後] |
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
STB ツールのみ.
TTTR - トリガー解除まで締める
このステップは、ツールトリガが解除される(締め付けられる)まで作動します。これは、プログラムの最後のステップとしてのみ使用できます。
パラメータ | 説明 |
|---|---|
名前 | ステップ名の英数字の値 |
ステップカテゴリ | 締め付けの段階を選択できるオプションのリスト[なし、ソフトスタート、ランダウン、最初、最後] |
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
STB ツールのみ.
T - トルクに合わせて締め付け/トルクに合わせて緩め
このステップでは、目標トルクに達するまでツールを作動させます。前方向は締め付け、後方向(逆方向)は緩めます。目標トルクは 0 より大きい数値に設定する必要があります。トルクに合わせて緩めのステップが有効になるには、トルクが目標の 110 % を超える必要があります。
T+A – トルクと角度に合わせて締め付け
このステップでは、目標トルクに達するまでツールを作動させます。この時点から、追加の目標角度まで継続して作動します。目標トルクと目標角度は 0 より大きい数値に設定する必要があります。
T|A – トルクまたは角度に合わせて締め付け
ツールは、目標トルクまたは目標角度のいずれかが最初に達するまで作動されます。目標トルクと目標角度は 0 より大きい数値に設定する必要があります。
T&A – トルクと角度まで締め付け
ツールは、目標トルクと目標角度の両方に達するまで作動されます。目標トルクと目標角度は 0 より大きい数値に設定する必要があります。
DT – DynaTork に合わせて締め付け
このステップでは、目標トルクに達するまでツールを作動させます。その後、ツールは DynaTork 時間中、目標トルクの DynaTork パーセンテージで電流を一定に保持します。
ツールの過熱を回避するため、ツールの最大トルクの 40% を超えて DynaTork を作動しないことを強く推奨します。
Y – 降伏に合わせて締め付け
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点は、トルクと角度の距離測定を基に計算されるトリガトルクレベルをトルクが超えてから、トルク勾配を監視して検出されます。角度距離パラメータは、指定されたジョイントのハードさに応じて設定されます。
勾配角度ウィンドウを設定します (ハードジョイント、ソフトジョイント、角度ウィンドウの手動設定)。手動を選択する場合、角度ウィンドウを設定する必要があります。ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
UM2- 降伏M2に合わせて締め付け
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点の検出には、トルクがトリガートルク (Tt) に達したときに始まり、続いてフィルタ角度 (Af) の度数にわたるトルク平均が計算されます。この手順は サンプル、参照数(Nrs)設定に従って繰り返されます。参照傾斜は、サンプル、参照数にかけた線形回帰で計算されます。この後、新しい平均値は、フィルター角度 の度数にかけて、継続的に計算されます。実際の傾斜は、最後のサンプル数 (Ns) の平均点にかけた線形回帰で計算されます。傾斜が参照傾斜の降伏点の割合 (Py) より小さい場合、降伏点に達します。
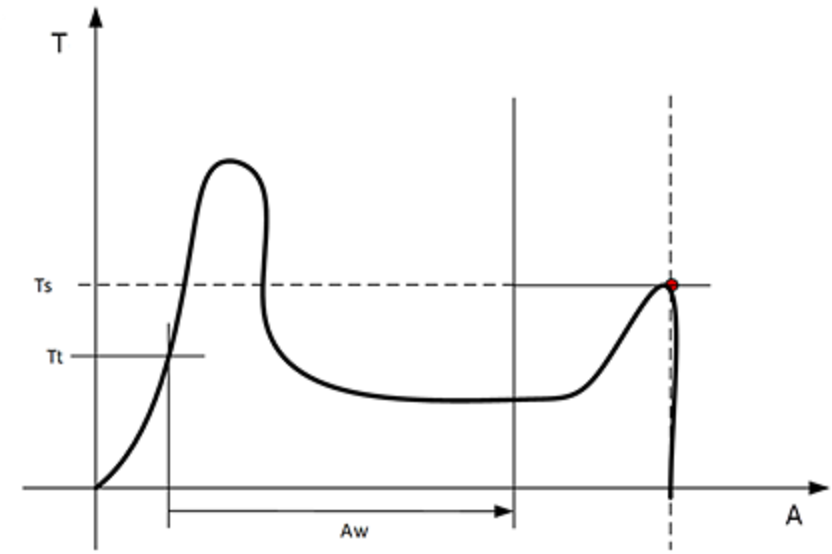
ThCT – トルクに合わせてスレッドカット
トルクに合わせてスレッドカット機能では、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ネジを用いて金属の薄層を締め付ける際などの締め付けが可能になります。ツールは、スレッドカット角度 (Aw) に達するまで前方向に作動します。スレッドカット角度ウィンドウは、トルクがスレッドカットトリガトルク (Ttc) を初めて超える時点から測定されます。スレッドカット角度に達した点から、ステップは目標トルク (Tt) に達するまで連続して作動します。
T = トルク、A = 角度
RD – ランダウン
ランダウンステップは、ネジがスレッドに入ってからネジヘッドが下位面に触れて着座ポイントに達する直前までの締め付けです。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
このステップでは、ツールは前方向に作動し、指定されている目標トルクまたは着座レベルに達すると停止します。着座までのランダウンタイプを選択する場合は、トリガトルク、角度デルタ、トルク勾配のパラメータを設定する必要があります。
E – 噛み合わせ
このステップでは、ソケットがネジに噛み合うまで両方向にツールが作動します。ステップは、噛み合わなければ継続がはいに設定されている場合は、目標トルクまたは目標角度に達するまで継続します。いずれかの方向で目標角度に達すると、方向が反転します。噛み合わせの最大試行回数を入力すると、検索の繰り返し回数を制限できます。いずれかの方向で目標トルクに達すると、ステップは OK のステータスで終了します。
Ext - 外部結果
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。この外部信号は、(例えば、I/O バスを介して) Power Focus 6000 にデジタル信号を供給できる任意の手段を介して供給できます。
信号が送信されると、結果ビュー (記録されているデータ) は、締め付けプログラム (指定されたトルク値、角度値、またはテキスト文字列) で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
パラメータ | 説明 |
|---|---|
トルク <目標トルク> | 希望する表示された目標トルク値の数値。例えば、クリック式レンチからの信号は <目標トルク> と表示されます。 |
角度 <目標角度> | 希望する表示された目標角度値の数値。例えば、クリック式レンチからの信号は <目標角度> と表示されます。 |
テキスト | 希望する表示されたテキストの英数字文字列。例:「オイルが交換されました」。 |
MWR - メカトロニック レンチ
メカトロニック レンチは、メカトロニック レンチ(MWR)と組み合わせてのみ使用できる特殊なステップです。
このステップは、他のステップと組み合わせて使用することはできません。このステップでは、制限は使用できません。デフォルトでは、このステップには次の3つのモニターがあります。ピークトルク、角度、およびクリックです。
パラメータ | 説明 |
|---|---|
名前 | ステップの名前を付けるための英数字の文字列。 |
緩め制限 | 締付け結果がNG(締め付け方向の間違い(緩め))とマークされた負のトルク(すなわち緩め方向のトルク)の数値。 (Nm)単位。 |
ツールサイズ | MWR-TAに取り付けられたエンドフィッティングツールの特定の長さの数値。(mm)単位。 |
ツールベンド | MWR-TAに取り付けられたエンドフィッティングツールの数値。 (°/Nm)単位。 |
リヒット角度ウィンドウ | トルクに達した場合に既にねじが締め付けられているかどうかを判断するための角度の数値。 (°)単位。 |
最大角速度 | ねじを締めることができる最大速度の数値。(°/ s)単位。 |
同期点 - Step Syncコントローラでのみ使用できます。
Step Sync の設定でさまざまなツールを同期させるには、同期点が使用されます。これらのツールは、締め付けプログラムの次のステップに進む前に、この点でお互いを待つことになります。同期点は、必要に応じて締め付けプログラムに手動で追加するか、またはチェックボックスをオンにして自動的に追加することができます。









































