Flerstegsmonitorer och begränsningar
Stegmonitorer
Stegmonitorer används för att verifiera att åtdragningen gjordes enligt specifikationen, exempelvis vinkelbegränsningar eller moment. Varje steg har obligatoriska stegövervakningar och valfria stegövervakningar. Obligatoriska övervakningar inkluderas när ett nytt steg dras till flerstegsprogrammet. De valfria skärmar är flexibla och kan placeras enligt behov i flerstegsprogrammet. Varje steg kan ha upp till fyra egna sorters övervakning.
Följande monitorer läggs automatiskt till varje steg som läggs till flerstegs åtdragningsprogrammet.
Stegmonitor | Gällande steg |
|---|---|
Vinkel | Alla |
Toppmoment | Alla |
PT – Toppmoment
Denna stegmonitor mäter maximalt vridmoment uppnådd under övervakningen, inklusive eventuella överskjutningar, och kontrollerar att det är mellan övre gräns och nedre gräns.
SOT – Stäng av moment
Avstängningspunkten är punkten där steget når sitt målvärde. Med stegmonitoren Stäng av vridmomentet mäts vridmomentet vid avstängningspunkten och kontrolleras för att vara mellan övre gräns och nedre gräns.
SOC – Stäng av ström
Avstängningspunkten är punkten där steget når sitt målvärde. Med stegövervakningen Stäng av ström mäts strömmen vid avstängningspunkten och kontrolleras så att den ligger mellan övre gräns och nedre gräns.
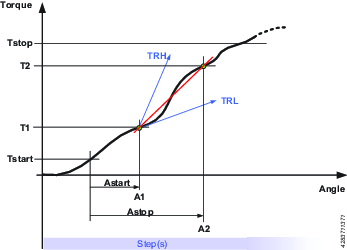
TRD – Momenthastighet och avvikelse
Denna stegmonitor mäter och kontrollerar att momenthastigheten, dvs, förhållandet mellan vridmoment vs. vinkel. Den beräknade momenthastigheten är markerat om det är inom momenthastighetsbegränsningarna definierade av High Limit (övre gräns) och Low Limit (nedre gräns).
Parameter | Beskrivning | I bild |
|---|---|---|
Momentstart | Moment där AngleStart startar | Tstart |
Momentstopp | Moment där mätning av vridmoment är stoppad. | Tstop |
AngleStart | När AngleStart har uppmätts från TorqueStart startar momentet för att mätas. | Astart |
AngleStop | Vinkelpunkt där mätning av vridmoment stoppas. | Astop |
Låg gräns | Definierad lägsta moment. | TRL |
Hög gräns | Definierat högsta moment. | TRH |
Parameter | Beskrivning | I bild |
|---|---|---|
Momentstart | Moment där AngleStart startar | Tstart |
Momentstopp | Moment där mätning av vridmoment är stoppad. | Tstop |
AngleStart | När AngleStart har uppmätts från TorqueStart startar momentet för att mätas. | Astart |
AngleStop | Vinkelpunkt där mätning av vridmoment stoppas. | Astop |
Låg gräns | Definierad lägsta moment. | TRL |
Hög gräns | Definierat högsta moment. | TRH |
A – Vinkel
Denna steg monitor mäter maximal vinkel vid maximalt vridmoment, avstängningsvinkel eller vinkel i slutet, under övervakningssekvensen och kontrollerar att den är mellan övre gräns och nedre gräns. Vinkelmätningen startar i början eller slutet av övervakningssekvensen eller om så anges, vid den punkt där momentet passerar Trigger Torque för första gången.
PTCA – Eftergängsnittsvinkel
Mäter uppnådd vinkeln under övervakning och kontrollerar att den är mellan vinkelbegränsningar. Trigger Torque-nivån ignoreras tills slutet av Gängsnittsvinkelfönster har uppnåtts. Efter det, startar mätning av vinkeln så fort uppmätt vridmoment är högre än Trigger Torque. Parametern Stoppvillkor anger där vinkelmätningen ska avslutas.
PTCPT – Eftergängsnitt toppmoment
Mäter det maximala vridmomentet som uppnåtts under övervakningen, inklusive eventuella överskridanden och kontrollerar att det ligger mellan momentgränserna. Alla vridmomentvärden ignoreras tills slutet av Gängsnittsvinkelfönster (Thread cut angle window) har nåtts.
TAW – Lågt moment i vinkelfönster
Skärmen kontrollerar att alla vridmomentvärden i Angle Window Length ligger mellan momentgränserna. Vinkelfönstret börjar vid Start Angle (startvinkeln) från den punkt där vridmomentet först passerar Trigger Torque. Om Trigger Torque inte är angiven, börjar Start Angle (startvinkeln) börjar i början av monitorsteget. Eftersom alla moment måste vara mellan momentbegränsningarna kan det hända att båda gränsvärdena överskrids. I så fall har fältet Torque In Angle Window High prioritet och är det som kommer att presenteras i resultatet. Om slutet på vinkelfönstret inte nås är monitorens status NOK.
PVTH – Eftervy genomsnittligt moment högt
Alla moment i Angle Window Length ska vara under Torque Limit High (vridmoments gräns hög). Vinkelfönstret börjar vid vinkelgraderna som ställs in i Start Angle (Startvinkel) i bakåtriktning från avstängningspunkten. Detta spänner sedan över vinkelgraderna som ställs in i vinkelfönstret längd i bakåtriktning. Om Startvinkel lämnas tomt börjar Vinkelfönstret vid avstängningspunkten. De vridmomentvärden som används i monitorn är baserade på medelmomentvärdet, beräknat över antal prov. Om stegets totala vinkel är mindre än Startvinkel plus Vinkelfönsterlängd, rapporterar monitoren NOK.
PVTL – Efterhandsvisning genomsnittligt moment låg
Samma som Post View average Torque High (eftervy genomsnittligt moment hög), men monitorn kontrollerar att alla vridmomentvärden i Angle Window Length (Vinkelfönstret längd) ligger över Torque Limit Low (Momentgräns låg) i stället.
YA – Vinkel från sträckgräns
Vinkeln övervakas efter att sträckgränsen är funnen. Sträckgränsen hittas genom att övervaka vridmomentgradienten, beräknad baserat på mätningar av vridmoment och vinkelavstånd. Parametern för vinkelavstånd ställs in enligt angiven hårdhet i förbandet.
SSD - Stick Slip Detection
Den här stegmonitorn upptäcker och anmäler ”stick slip”-effekter (spärrfel) under ett steg. Detektionen görs genom att räkna antalet gånger vridmomentet faller under Utlösningsnivå (Trigger Level). Om maximalt antal är större än Maximalt antal oscillationer (Maximum Number of Oscillations) rapporteras spärrfelet. Monitorn fungerar i två olika lägen, Dynamisk eller Fast. Skillnaden mellan de olika lägena är hur Utlösningsnivån beräknas.
Dynamiskt moment: Trigger Level (Utlösningsnivån) är dynamiskt beräknad som Peak Torque Percentage) toppmomentprocent av aktuell max vridmoment som har uppnåtts hittills under monitorn. Övervakningen startas så snart moment passerar utlösande moment.
Fixerat moment: Triggernivå är fasta utlösande momentet som anges av användaren I detta läge är inte procentsatsen nödvändig.
Om vridmomentet aldrig når Trigger Torque (utlösande momentet) startar inte övervakningen, så kommer detta att resultera i status NOK.
PrT - Prevailing Torque (låsmoment)
Skärmen beräknar det gällande låsmomentvärdet under Fönsterlängd och kontrollerar att det ligger mellan momentgränsvärdena. Vinkelfönstret börjar vid vinkelgraderna som ställs in i Start Angle (Startvinkel) i bakåtriktning från avstängningspunkten. Detta spänner sedan över vinkelgraderna som ställs in i vinkelfönstret längd i bakåtriktning. Om Startvinkel lämnas tomt börjar vinkelfönstret vid avstängningspunkten. Den beräknade låsmomentet är det genomsnittliga momentet eller toppmomentet (beroende på parametervärdet som användaren har ställt in) underFönsterlängd. Det beräknade värdet sparas som resultatdata Uppmätt låsmoment. Om Momentkompensering är På kommer uppmätt låsmoment att subtraheras från alla momentresultat i efterföljande steg. Eventuella tidigare beräknade kompensationsvärden för låsmoment kommer inte längre att subtraheras från momentresultaten. Om Torque compensation (momentkompensation) är inställd på No (nej), kommer ingen subtraktion att göras i efterföljande steg.
Om stegets totala vinkel är mindre än Startvinkel plus Vinkelfönsterlängd, rapporterar monitoren NOK.
Låsmoment kan mätas som ett genomsnitt av uppmätta värden, eller ett toppmoment. Du kan välja mellan de två lägena genom att sätta parametern Använd värde på antingen Medelmoment (för genomsnittsvärden), eller Toppmoment (”peak”, för toppvärden).
Ti – Tid
Mäter den förflutna tiden under monitorn och kontrollerar att det ligger mellan tidsgränserna. Tidmätningen börjar vid monitorns start och, om utlösningsmomentet är angivet, vid den punkt där vridmomentet överför Trigger Torque för första gången under övervakningen.
CI - Klicka på
Monitor för att möjliggöra klickmoment och klickvinkelresultat. Denna bildskärm har inga inställningar och kan bara användas i samband med MWR-steget.
Restriktioner
För att säkerställa att åtdragningen stannar om något oväntat händer, är det möjligt att lägga till begränsningar för flerstegs åtdragningsprogrammet. Dessa begränsningar kan till exempel testa att ett maximalt vridmoment inte uppnås, eller att en del av flerstegsåtdragningen inte tar för lång tid att köra. Varje steg har en egen uppsättning obligatoriska stegbegränsningar och valfria stegbegränsningar. Obligatoriska begränsningar inkluderas när ett nytt steg dras till flerstegsprogrammet. Alla faser kan ha upp till fyra Restriktioner vardera.
Följande begränsningar läggs automatiskt till varje steg som läggs till flerstegs åtdragningsprogrammet.
Stegbegränsning | Gällande steg |
|---|---|
Stegbegränsning, maximal tid | Alla |
Stegbegränsning, maximalt vridmoment |
|
Stegbegränsning, maximal vinkel |
|
Ti – maximal tid
Restriktionen kontrollerar tiden. När maxgränsen har nåtts verktyget stannar omedelbart.
A – Maximal vinkel
Restriktionen mäter vinkeln. Om den uppmätta vinkeln når maxgränsen stoppas verktyget omedelbart. Vinkeln mäts från början av begränsningen eller, om den specificeras, från den punkt där vridmomentet passerar Torque Trigger (vridmomentutlösaren) för första gången under detta steg.
Parameter | Beskrivning |
|---|---|
Avtryckarmoment | Vinkeln mäts från detta moment om så anges. |
Maxgräns | När denna gräns har uppnåtts stannar verktyget omedelbart. |
T – Max.moment
Denna begränsning kontrollerar vridmoment och om uppmätt vridmoment överstiger Maximum Limit (maximal gräns) stoppar verktyget omedelbart.
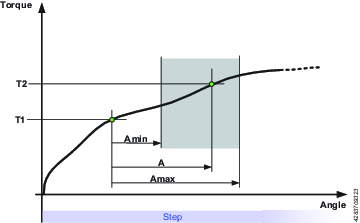
CTh – Cross Thread (korsgängad)
Denna begränsning kontrollerar vinkel från den punkt där momentet passerar Startmoment (T1) till den punkt där momentet passerar Slutmoment (T2). Om vinkeln uppmätt från Start Torque (startmoment) (T1) är högre än Maximum Angle Limit (maximal vinkelgräns) (Amax), stoppas verktyget omedelbart.
När vridmomentet passerar End Torque (slutmoment) (T2) kontrolleras den uppmätta vinkeln mot gränsen Minimum Angle Limit (minsta vinkelgräns) (Amin). Om vinkeln är lägre än den här gränsen stoppas verktyget omedelbart.
RT – Upphäver moment
Denna begränsning kontrollerar vridmomentet och om det uppmätta vridmomentet är lägre än Rescinding Torque Limit (återkallningsmomentgräns), stoppas verktyget omedelbart och programmet hoppar till slutet. För begränsningen ska vara aktiv måste vridmomentet först överstiga 110 % av Rescinding Torque Limit(återkallningsmomentgräns).
Kabelverktyg har möjlighet att välja återkallningsmoment för vinkel. Denna begränsning styrs av två parametrar: Procent och Tid under gränsen. Procent anger nedåtriktad avvikelse från det senaste toppmomentet och Tid under gränsen anger längden (mellan 5 och 500 ms) av den avvikelsen. Endast när båda villkoren (lika med eller lägre än den angivna procentsatsen för den inställda varaktigheten) är uppfyllda, kommer programmet att avbrytas och hoppa till slutet.
TG – Momentgradient
Denna begränsning kontrollerar lutningen och om den är utanför Gradient limits (gradientgränser) verktyget stoppas omedelbart och programmet hoppar till slutet. Den första gradienten beräknad Angle Window (vinkelfönster) efter att Trigger Torque (vridmoment) har uppnåtts och en ny gradient beräknas varje gång ett nytt vridmoment och vinkelprov är tillgängligt.
Om stegets slut är uppnått innan du passerar Trigger Torque anses denna begränsning vara OK, och inga åtdragningsfel rapporteras.
TCD - Moment kontra strömavvikelse
Begränsning verifierar att alla aktuella mätningar konverteras till motsvarande moment är mest Maximum deviation (maximal avvikelse) från den verkliga momentet uppmätt med vridmomentsomvandlaren. Begränsningen startar när vridmomentet når Trigger Torque (utlösarmomentet) för första gången under steget och är aktivt tills steget når sitt mål.
Om Trigger Torque aldrig är nått kommer monitorn att rapporten OK.
TAW - Lågt moment i vinkelfönster
Denna begränsning kontrollerar att det uppmätt Angle Window Length ligger mellan Torque limits (momentgränserna). Om det uppmätta vridmomentet ligger utanför gränserna stoppas verktyget omedelbart och programmet hoppar till slutet. Vinkelfönstret längd börjar vid Start Angle (startvinkeln) från den punkt där vridmomentet först passerar Trigger Torque. Om Trigger Torque inte är angiven, börjar Start Angle (startvinkeln) börjar i början av begränsningen.
Om slutet på vinkelfönstret längd inte nås är status på begränsningen NOK.









































