Monitores e Restrições de Múltiplas Etapas
Monitores de etapa
Monitores de etapa são utilizadas para verificar se o aperto foi atingido de acordo com a especificação, por exemplo, limites de ângulo ou torque. Cada etapa apresenta monitores obrigatórios de etapa e monitores opcionais de etapa. As monitores obrigatórios são inseridos ao se arrastar uma nova etapa para o programa de múltiplas etapas. Os monitores opcionais são flexíveis e podem ser colocados no programa de múltiplas etapas, conforme a necessidade. Cada etapa pode ter até oito monitores.
Os monitores a seguir são adicionados automaticamente a toda etapa adicionada ao programa de aperto de múltiplas etapas.
Monitor da etapa | Etapas aplicáveis |
|---|---|
Ângulo | Tudo |
Pico de torque | Tudo |
PT – Pico de torque
Esse monitor mede o torque máximo alcançado durante o monitor, inclusive torques adicionais, e verifica se o valor encontra-se entre Limite alto e Limite baixo.
SOT – Torque de desligamento
O ponto de desligamento é o ponto em que a etapa atinge seu alvo. Ao utilizar o monitor Torque de desligamento, o torque é medido no ponto de desligamento e verifica-se se este fica entre Limite alto e Limite baixo.
SOC – Corrente de desligamento
O ponto de desligamento é o ponto em que a etapa atinge seu alvo. Ao utilizar o monitor Corrente de desligamento, a corrente é medida no ponto de desligamento e verifica-se se este fica entre Limite alto e Limite baixo.
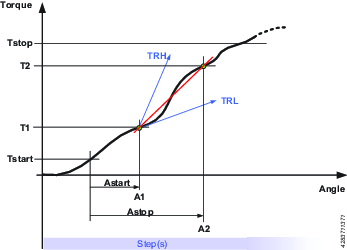
TRD – Taxa e desvio de torque
Esse monitor de etapa mede e verifica a taxa de torque, que é a relação entre torque e ângulo. A taxa de torque calculada é em seguida verificada para conferir se está dentro dos limites da taxa de torque definidos por Limite alto e Limite baixo.
Parâmetro | Descrição | Na ilustração |
|---|---|---|
TorqueStart | Torque a partir do qual AngleStart começa | Tstart |
TorqueStop | Torque em que a medição do torque para. | Tstop |
AngleStart | Quando AngleStart for medido a partir de TorqueStart, o torque começa a ser medido. | Astart |
AngleStop | Ponto de ângulo em que a medição do torque para. | Astop |
Limite baixo | Torque mais baixo definido. | TRL |
Limite alto | Torque mais alto definido. | TRH |
Parâmetro | Descrição | Na ilustração |
|---|---|---|
TorqueStart | Torque a partir do qual AngleStart começa | Tstart |
TorqueStop | Torque em que a medição do torque para. | Tstop |
AngleStart | Quando AngleStart for medido a partir de TorqueStart, o torque começa a ser medido. | Astart |
AngleStop | Ponto de ângulo em que a medição do torque para. | Astop |
Limite baixo | Torque mais baixo definido. | TRL |
Limite alto | Torque mais alto definido. | TRH |
A – Ângulo
Esse monitor de etapa mede o pico de ângulo, ângulo no pico de torque, ângulo de desligamento ou ângulo no final, atingidos durante a sequência de monitoramento e verifica se fica entre Limite alto e Limite baixo. A medição de ângulo começa no começo ou término da sequência de monitoramento ou, se especificado, no ponto em que o torque ultrapassa o Torque de acionamento pela primeira vez.
PTCA – Ângulo após a abertura de rosca
Mede o ângulo atingido durante o monitoramento e verifica se este fica entre os limites de ângulo especificados. O nível de Torque é ignorado até o final da Janela de abertura de rosca ser atingido. Depois disso, a medição do ângulo começa logo que o torque medido ficar acima do Torque de acionamento. O parâmetro Condição de parada especifica quando a medição de ângulo deve finalizar.
PTCPT – Pico de torque de abertura de rosca posterior
Mede o torque máximo atingido durante o monitoramento, inclusive torques adicionais, e verifica se este fica entre os limites de torque especificados. Todos os valores de torque são ignorados até o final da Janela de abertura de rosca ser atingido.
TAW – Torque na janela de ângulo
O monitor verifica se todos os valores de torque em Comprimento da janela de ângulo estão dentro dos limites de torque. A Janela de ângulo começa em Ângulo inicial a partir do ponto em que o primeiro torque ultrapassa o Torque de acionamento. Se Torque de acionamento não for definido, o Ângulo inicial começa no início da etapa de monitoramento. Uma vez que todos os valores de torque devem estar entre os limites de torque, pode ocorrer que ambos os limites sejam excedidos. Nesse caso, o erro Torque alto na janela de ângulo tem prioridade e é um dos que será apresentado no resultado. Se o final de Janela de Ângulo não for atingido, o status do monitor é NOK.
PVTH – Torque médio alto de pós-visualização
Todos os valores de torque em Extensão da janela de ângulo devem estar abaixo de Limite de torque alto. A Janela de ângulo começa nos graus de ângulo definidos em Ângulo inicial no sentido reverso a partir do ponto de desligamento. Isso abrange os graus de ângulo definidos na Extensão da janela de ângulo no sentido reverso. Se Ângulo inicial for deixado em branco Janela de ângulo começa no ponto de desligamento. Os valores de torque utilizado no monitor são baseados no valor de torque médio, calculado com base em Número de amostras. Se o ângulo total da etapa for menor que Ângulo inicial mais Extensão da janela de ângulo, o monitor relatará NOK.
PVTL – Torque médio baixo de pós-visualização
O mesmo que o monitor Torque médio alto pós-visualização , mas, em vez disso, esse monitor verifica se todos os valores de torque em Extensão da janela de ângulo estão acima de Limite de torque baixo .
YA – Ângulo a partir do ponto de escoamento
O ângulo é monitorado após ser encontrado o ponto de escoamento. O Ponto de escoamento é encontrado com o monitoramento do gradiente de torque, calculado com base em medições de Torque e distância de Ângulo. O parâmetro distância angular é definido de acordo com a rigidez especificada da junta.
SSD - Detecção de deslizamento da broca
Esse monitor de etapa detecta e relata efeitos de deslizamento de broca durante uma etapa. A detecção é feita contando-se o número de vezes em que o torque fica abaixo do Nível inicial. Se o número de vezes for maior que Número máximo de oscilações , é relatado o erro de deslizamento de broca. O monitor opera em dois modos diferentes, Dinâmico ou Fixo. A diferença entre os modos está na maneira em que o Nível inicial é calculado.
Torque dinâmico: Nível inicial é calculado dinamicamente como Percentagem do pico de torque do torque máx. atual, que foi atingido até o momento durante o monitoramento. O monitoramento começa logo que o torque ultrapassa o Torque de acionamento.
Torque fixo: Nível de acionamento é o Torque de acionamento fixo especificado pelo usuário. Nesse modo, a percentagem não é necessária.
Se o torque nunca atingir o Torque de acionamento , o monitoramento não começa, o que resultará em um status NOK.
PrT - Torque prevalecente
O monitor calcula o valor do torque prevalecente na Extensão da janela e verifica se fica entre os limites de torque. A Janela de ângulo começa nos graus de ângulo definidos em Ângulo inicial no sentido reverso a partir do ponto de desligamento. Isso abrange os graus de ângulo definidos na Extensão da janela de ângulo no sentido reverso. Se Ângulo inicial for deixado em branco Janela de ângulo começa no ponto de desligamento. O valor calculado do torque prevalecente é um valor médio ou de pico de torque (em função do parâmetro definido pelo usuário) durante a Extensão da Janela. O valor calculado é salvo como dados de resultado de Torque prevalecente medido. Se Compensação de torque é definido como Ativo, o Torque prevalecente medido será subtraído de todos os valores de resultado de torque em etapas subsequentes. Valores de compensação de torque prevalecente calculados anteriormente não serão mais subtraídos dos valores de resultado de torque. Se Compensação de torque for definida como Nenhuma, não será feita nenhuma subtração em etapas subsequentes.
Se o ângulo total da etapa for menor que Ângulo inicial mais Extensão da janela de ângulo, o monitor relatará NOK.
O torque prevalecente pode ser medido como uma média do valores medidos ou no pico de torque. Para escolher entre esses dois módulos, defina o parâmetro Usar Valor para o Torque médio (para valores médios) ou Pico de torque (para valor de pico).
Ti - Tempo
Mede o tempo decorrido durante o monitoramento e verifica se este fica entre os limites de tempo especificados. A medição de ângulo se inicia no começo do monitoramento ou, se especificado o Torque de acionamento, no ponto em que o torque ultrapassa o Torque de acionamento pela primeira vez durante o monitoramento.
Cl - Estalo
Monitor que ativa os resultados de torque de estalo e ângulo de estalo. Esse monitor não apresenta definições e somente pode ser utilizado em conjunto com a etapa MWR.
Restrições
Para assegurar que o aperto pare se algo inesperado acontecer, é possível adicionar restrições ao programa de aperto de múltiplas etapas. Essas restrições podem, por exemplo, testar se um torque máximo não foi atingido ou se parte de um aperto em múltiplas etapas não demora demais para ser executado. Cada etapa apresenta seus próprios conjuntos de restrições obrigatórias de etapa e restrições opcionais de etapa. As restrições obrigatórias são inseridas ao se arrastar uma nova etapa para o programa de múltiplas etapas. Todas as etapas podem ter até quatro restrições cada.
As restrições a seguir são adicionadas automaticamente a cada etapa adicionada ao programa de aperto de múltiplas etapas.
Restrição da etapa | Etapas aplicáveis |
|---|---|
Tempo máximo de restrição de restrição da etapa | Tudo |
Torque máximo de restrição da etapa |
|
Ângulo máximo de restrição da etapa |
|
Ti – Tempo máximo
Essa restrição verifica o tempo. Se Limite máximo for atingido, a ferramenta para imediatamente.
A – Ângulo máximo
Essa restrição mede o ângulo. Se o ângulo medido atingir o Limite máximo , a ferramenta para imediatamente. O ângulo é medido a partir do início da restrição ou, se especificado, a partir do ponto em que i torque ultrapassa Torque de acionamento pela primeira vez durante a etapa.
Parâmetro | Descrição |
|---|---|
Torque de acionamento | Se especificado, esse é o torque a partir do qual o ângulo é medido. |
Limite máximo | Se esse limite for atingido, a ferramenta para imediatamente. |
T - Torque máximo
Essa restrição verifica o torque e se este exceder o Limite máximo, a ferramenta para imediatamente.
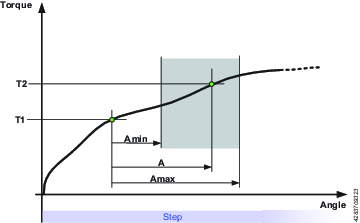
CTh - Emperramento de rosca
Essa restrição verifica o ângulo a partir do ponto em que o torque ultrapassa Torque inicial (T1) até o ponto em que o torque ultrapassa Torque final (T2). Se o ângulo medido a partir de Torque inicial (T1) for maior que Limite de ângulo máximo (Amax), a ferramenta para imediatamente.
Quando o torque ultrapassa Torque final (T2), o ângulo medido é verificado em relação ao limite Limite de ângulo mínimo (Amin). Se o ângulo for inferior a esse limite, a ferramenta para imediatamente.
RT - Torque de cancelamento
Essa restrição verifica o torque e se o torque medido é inferior ao Limite de torque de cancelamento a ferramenta para imediatamente e o programa pula para o final. Para que a restrição fique ativa, o torque deve primeiramente exceder a 110% do Limite de torque de cancelamento.
Ferramentas a cabo apresentam a opção de escolher Torque de cancelamento para ângulo. Essa restrições é controlada por dois parâmetros: Percentagem e Tempo abaixo do limite. Percentagem define o desvio para baixo a partir do último pico de torque, e Tempo abaixo do limite define a duração (entre 5 e 500 ms) daquele desvio. Somente quando ambas as condições (igual à ou inferior à percentagem indicada da duração definida) são atendidas, o programa será interrompido e vai para o final.
TG - Gradiente de torque
Essa restrição verifica o gradiente e, se o gradiente estiver fora dos Limites de gradiente, a ferramenta para imediatamente e o programa vai para o final. O primeiro gradiente é Janela de ângulo calculado após Torque no acionamento ser atingido e, em seguida, um novo gradiente é calculado toda vez que um novo torque e amostra de ângulo estiverem disponíveis.
Se o final da etapa é atingido antes de ultrapassar Torque de acionamento essa restrição é considerada OK e não são relatados erros de aperto.
TCD - Desvio de torque x corrente
Essa restrição verifica se todas as medições de corrente convertidas em torques correspondentes são, na maior parte, o Desvio máximo do torque real medido com o transdutor de torque. A restrição começa quando o torque atinge Torque de acionamento pela primeira vez durante a etapa e fica ativa até a etapa atingir seu alvo.
Se Torque de acionamento nunca for atingido, o monitor relatará OK.
TAW - Torque na janela de ângulo
Essa restrição verifica se o torque medido na Extensão da janela de ângulo fica dentro dos Limites de torque. Se o torque medido ficar fora dos limites, a ferramenta para imediatamente e o programa vai para o final. A Extensão da janela de ângulo começa em Ângulo inicial a partir do ponto em que o primeiro torque ultrapassa o Torque de acionamento. Se Torque de acionamento não for definido, o Ângulo inicial começa no início da restrição.
Se o final da Extensão da janela de ângulo não for atingido, o status da restrição é NOK.









































