Provádění výpočtu polohy pro štítky
Vzhledem ke stereo přístupu dvou kamer se 3D body na štítku vypočítávají z odpovídajících bodů na rozích štítku. Systém určuje rohy oblasti štítku na snímku.
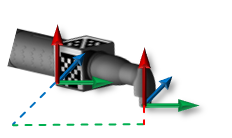
3D výsledek výpočtu polohy pro cíle
Na základě poloh(y) cíle/cílů se určuje poloha (pozice a orientace) cíle v odpovídajícím souřadnicovém systému.