조임 단계
각도(A)만큼 조임/풀기
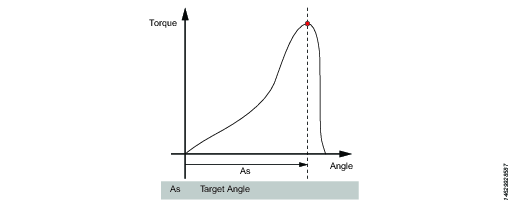
A - 각도만큼 조임
목표 각도에 도달할 때까지 이 단계는 공구를 작동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
A –각도까지 풀기
이 단계에서는 각도의 목표에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
매개변수
매개변수 | 설명 |
|---|---|
목표 각도 | 각도 목표입니다. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
T - 토크까지 조임/풀기
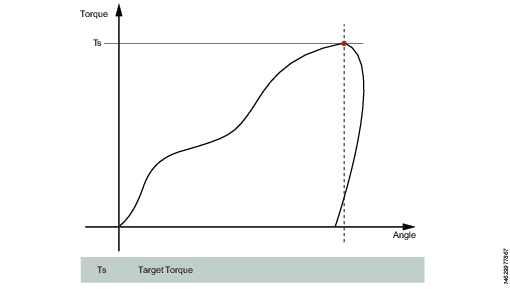
T - 토크까지 조임
목표 토크에 도달할 때까지 이 단계는 정방향의 프로그래밍된 속도로 공구를 작동합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
T - 토크까지 풀기
이 단계는 공구를 역방향으로 해당 속도로 실행합니다. 토크까지 풀기 단계가 활성화되려면, 토크는 목표 토크의 110 %를 초과해야 합니다. 목표 토크는 양의 값으로 설정해야합니다. 목표 토크에 도달한 후, 목표 토크 이하로 토크가 떨어질 때까지 단계가 실행됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
첫째 토크 시 중지 | 단계는 토크가 목표 토크를 지날 때까지 실행됩니다. 목표 토크는 양의 값으로 설정해야합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
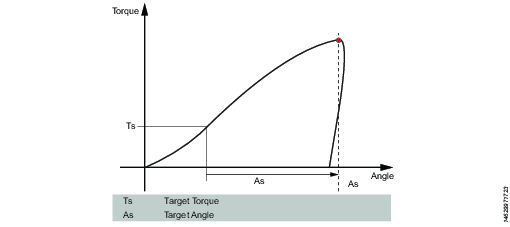
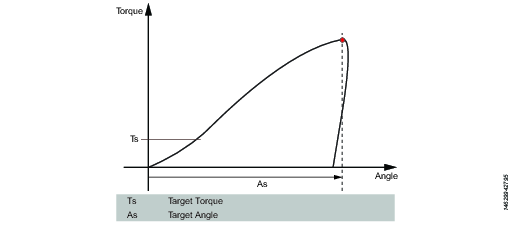
T + A - 토크 플러스 각도까지 조임
목표 토크에 도달할 때까지 이 단계가 공구를 작동합니다. 이 지점에서 이것은 추가로 목표 각도를 계속 실행합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
목표 각도 | 각도 목표입니다. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
DI – 디지털 입력까지 실행
이 단계는 정지 조건 값에 따라 디지털 입력으로 지정된 입력 값이 높거나 낮을 때까지 매개변수 방향으로 정의된 방향으로 공구를 실행합니다.
매개변수 | 설명 |
|---|---|
방향 | 정방향 또는 역방향 |
디지털 입력 | 컨트롤러에서 다음 로컬 디지털 입력 중 하나를 선택할 수 있습니다.
|
정지 조건 |
|
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 (rpm) | 기본값: 60 rpm. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동인 경우에 사용할 수 있습니다. 기본값: 500 rpm/s. |
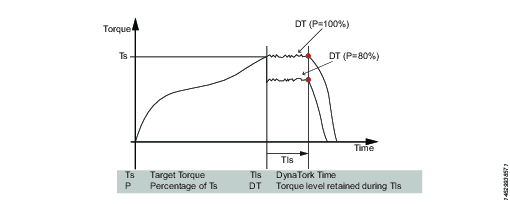
DynaTork(DT)까지 조임
이 단계에서는 목표 토크에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 공구는 DynaTork 시간 동안 목표 토크의 DynaTork 비율로 전류를 일정하게 유지합니다.
공구의 과열을 방지하기 위해 최대 토크의 40%를 넘게 DynaTork를 작동하지 않을 것을 매우 권장합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
DynaTork 시간 | DynaTork가 활성화될 시간입니다. |
DynaTork 백분율 | 토크 목표의 백분율입니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 (rpm) | 기본값: 60 rpm. |
대기 (W)
이 단계에서 공구는 지정된 시간 동안 대기합니다. 공구는 대기하는 동안 회전하지 않습니다.
대기 단계 이전의 단계에서는 브레이크를 반드시 켜짐으로 설정해야 합니다. 즉, 대기 단계는 반드시 공구를 정지 상태로 시작해야 합니다.
매개변수 | 설명 |
|---|---|
대기 시간 | 도구가 정지 상태로 있는 시간(초)입니다. |
위치 고정 | 켜짐 또는 꺼짐으로 변환됩니다. 켜짐으로 설정되면 공구는 목표 시간 도중 공구가 위치를 유지합니다. |
소켓 해지 (SR)
이 단계에서는 목표 각도에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
다단계 조임 프로그램의 조임 경로에서 마지막 단계로만 그 단계를 사용하는 것이 허용됩니다. 그러나, 이 단계 후에 동기화 지점을 추가할 수 있습니다.
매개변수 | 설명 |
|---|---|
목표 각도 | 각도 목표입니다. 기본값: 3º , 반드시 > 0 |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
T|A – 토크 또는 각도까지 조임
이 단계는 토크 목표 또는 각도 목표 중 첫 번째 목표에 도달 할 때까지 앞방향으로 선택한 속도로 공구를 실행합니다. 토크 및 각도 측정은 단계의 시작 부분에서 시작됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 필수 조건: > 0. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
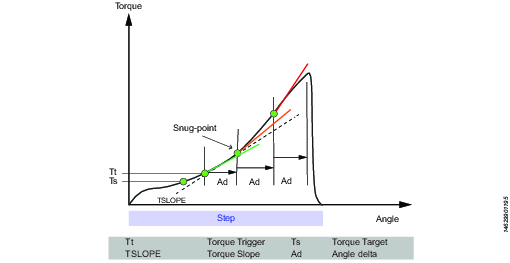
런다운 (RD)
이 단계에서는 정방향의 해당 속도로 공구를 실행하고 런다운 유형에 따라 달라지는, 토크 또는 스너그 단계 동작은 다음과 같습니다.
런다운 유형: 토크까지: 지정된 목표 토크가 발견되면 단계가 중지됩니다.
런다운 유형: 스너그까지: 스너그 경사도 계산은 지정된 토크 트리거 레벨 Tt에서 시작됩니다. 어떠한 토크 트리거도 설정되지 않은 경우 단계 시작시 경사도 계산이 시작됩니다.
경사도 계산은 Ad 각도로 두 각도 지점 사이에서 이루어지며 다음과 같이 계산됩니다. (Tn – Tn-1) / (An – An-1) 그리고 두 개별 항목 뒤의 두 기울기가 TSLOPE 보다 크면 바로 스너그 지점이 발견됩니다.
매개변수 | 설명 |
|---|---|
런다운 유형 | 토크까지 또는 스너그까지. |
목표 토크 | 기본값: “설정되지 않음". 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
트리거 토크 | 런다운 유형이 스너그 까지인 경우 트리거 토크 필드가 표시됩니다. 기본값: “설정되지 않음". 필수 조건: > 0. |
증분 각도 | 런다운 유형이 스너그 까지인 경우 델타 각도 필드가 표시됩니다. 기본값: "0" 필수 조건: > 0. |
토크 속도 | 런다운 유형이 스너그 까지인 경우 델타 각도 필드가 표시됩니다. 기본값: "0" 필수 조건: > 0. |
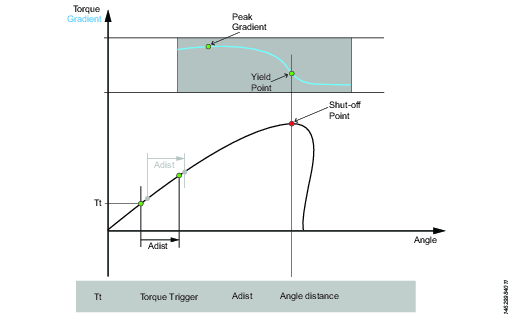
Y - 항복점 까지 조임
항복점이 감지될 때까지 이 전략은 정방향의 속도로 공구를 작동합니다. 토크가 바로 트리거 토크 수준을 초과하는 지점부터 토크 경사도릍 모니터링함으로써 항복점이 발견되며, 토크 및 각도 거리 측정치가 계산 근거입니다. 각도 거리 매개변수는 조인트의 지정된 경도에 따라 설정됩니다.
경사각 창을 설정합니다 (하드 조인트, 소프트 조인트 또는 각도 창을 위한 수동 설정). 수동을 선택하면 각도 창을 설정해야 합니다. 조인트는 나사가 완전한 토크로 조여지고 착좌점까지 30도 이하로 회전하면 하드로 간주합니다. 소프트 조인트는 착좌점까지 조인 후에 720° 이상 회전합니다. 경도 매개변수는 경사도 계산을 위한 각도 창을 정의합니다. 조인트 경도가 높을수록 각도 창이 작습니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100를 충족해야 합니다. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
항복 지점 비율 | 필수 조건: >= 20 % |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|
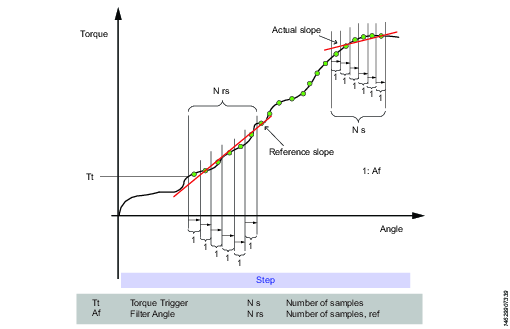
항복점까지 조임, 방법 2 (YM2)
항복점이 감지될 때까지 이 단계는 정방향의 지정된 속도로 공구를 작동합니다.
토크가 Tt에 도달하면 항복점 검색이 시작됩니다. Af도에 대한 토크 평균이 계산됩니다. 이 절차는 N rs번 반복됩니다.
참조 기울기는 N rs점에 대한 선형 회귀 분석을 통해 계산됩니다. 그 후에, A f 도에 대한 새로운 평균값이 연속적으로 계산됩니다.
실제 기울기는 마지막 N s 평균점에 대한 선형 회귀 분석을 통해 계산됩니다. 기울기가 참조 기울기의 Py % 보다 작으면 항복점에 도달됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
필터 각도 | 기본값: 1. 필수 조건: > 0. |
샘플 수 | 기본값: 6. 필수 조건: >= 4. |
샘플 수, 참조 | 기본값: 6. 필수 조건: >= 4. |
항복 지점 비율 | 기본값: 90% 필수 조건: >20%. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
TC - 토크 교정
토크 목표에 도달할 때까지 이 단계는 정방향의 지정된 속도로 공구를 작동합니다.
이 항목을 주 또는 보조로 설정하면 두 개의 변환기 중 하나를 교정할 수 있습니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
트랜스듀서 | 주 또는 보조. 기본값: 주 |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
체결 (E)
소켓에 나사가 체결될 때까지 이 단계는 두 방향으로 공구를 작동합니다. 체결되지 않으면 계속 진행이 예로 지정되어 있는 한 이 단계는 목표 토크나 목표 각도에 도달할 때까지 계속 실행됩니다. 대상 각도가 어느 방향으로든 도달하면 방향이 반전됩니다. 최대 체결 시도에 들어가서 검색 반복을 제한합니다. 목표 토크가 어떤 방향으로든 도달하면 단계는 OK 상태로 종료됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 기본값: 0. 필수 조건: > 0. |
최대 체결 시도 | 기본값: 2. 필수 조건: > 0. |
체결되지 않은 경우 계속하기 | 예인 경우 체결 시도가 실패하더라도 단계는 OK 상태로 종료됩니다. 아니오 인 경우 체결 시도가 실패하면 NOK 상태로 종료됩니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
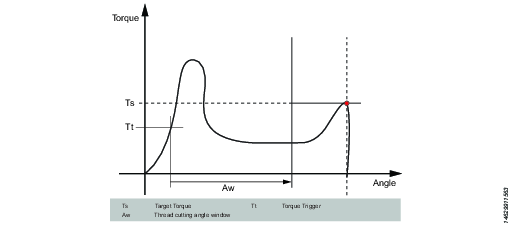
토크까지 스레드 컷팅 (ThCT)
토크까지 스레드 컷팅 기능은 필요한 런다운 토크가 런다운 완료 토크보다 큰 조임을 가능하게 합니다. 예를 들어, 자체 스레드(또는 자체 태핑) 나사를 사용하여 금속의 얇은 층을 조일 때 사용됩니다. 스레드 컷팅 각도(Aw)에 도달할 때까지 이 공구는 정방향으로 작동합니다. 토크가 스레드 커트 트리거 토크(Ttc)를 처음 통과할 때 스레드 컷팅 각도 창이 측정됩니다. 스레드 컷팅 각도에 도달한 시점에서, 단계는 목표 토크(Tt)에 도달할 때까지 계속 실행됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
스레드 컷팅 각도 창 | 기본값: 0. 필수 조건: > 0. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
토크 및 각도까지 조임 (T&A)
공구는 목표 토크와 목표 각도에 도달할 때까지 정방향으로 지정된 속도로 실행될 때까지 작동합니다. 목표 토크와 목표 각도는 > 0으로 설정되어야 합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 기본값: 0. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |









































