Etapas de apriete
Apretar/aflojar hasta ángulo (A)
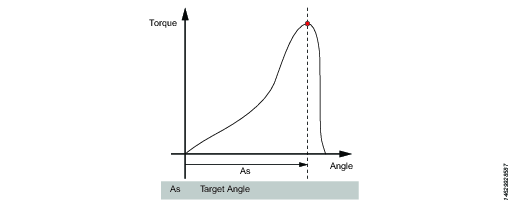
A – Apretar hasta ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
A – Aflojar hasta ángulo
Esta etapa opera la herramienta con la velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Parámetros
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
P – Apretar/aflojar hasta par
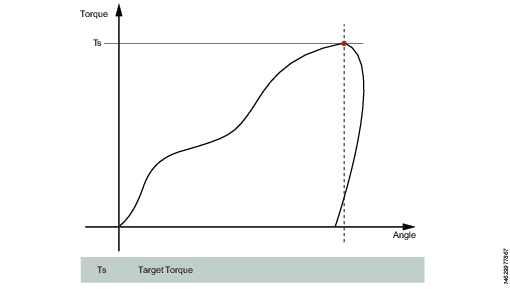
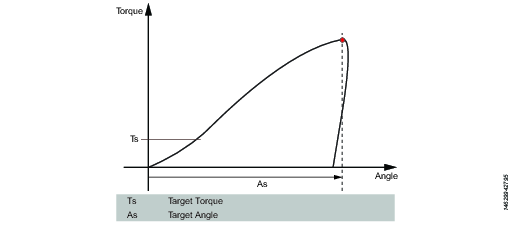
T - Apretar hasta par
Esta etapa opera la herramienta con la velocidad programada en la dirección hacia adelante hasta que se alcanza el par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
T – Aflojar hasta par
Esta etapa opera la herramienta con la velocidad n hacia atrás. Para que se active la etapa, el par debe exceder primero el 110 % del par objetivo. El par objetivo debe tener un valor positivo. Después de alcanzar el par objetivo, se ejecutará el paso hasta que el par caiga por debajo del par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Detener en primer par | Se ejecutará el paso hasta que el par pase el par objetivo. El par objetivo debe tener un valor positivo. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
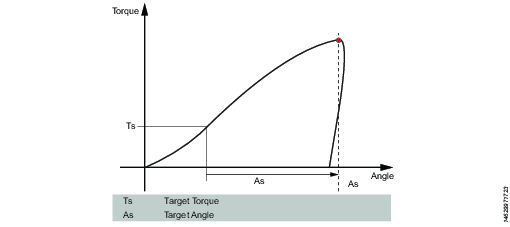
T+A – Apretar hasta par más ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. Desde este punto continúa operando un ángulo objetivo adicional.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
DI – Ejecutar hasta entrada digital
Esta etapa ejecuta la herramienta en la dirección definida por el parámetro Dirección, hasta que la entrada especificada por Entrada digital se vuelve alta o baja dependiendo del valor de Condición de parada.
Parámetro | Descripción |
|---|---|
Dirección | Hacia adelante o hacia atrás |
Entrada digital | Se puede seleccionar una de las siguientes entradas digitales locales en el controlador:
|
Condición de parada |
|
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Velocidad (rpm) | Predeterminado: 60 rpm. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Disponible si Tipo de rampa de velocidad es Manual. Predeterminado: 500 rpm/s. |
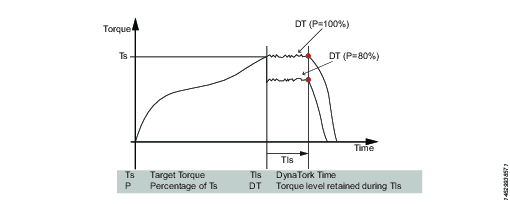
Apretar hasta DynaTork (DT)
Esta etapa opera la herramienta con la velocidad n en la dirección hacia adelante hasta que se alcanza el Ángulo objetivo. La herramienta mantendrá entonces la constante en el Porcentaje DynaTork del Par objetivo durante el Tiempo DynaTork.
Para evitar un sobrecalentamiento de la herramienta, se recomienda encarecidamente no operar DynaTork por encima del 40 % del par máximo de la herramienta.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tiempo de DynaTork | El tiempo de DynaTork estará activo. |
Porcentaje de DynaTork | El porcentaje del Par objetivo. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad (rpm) | Predeterminado: 60 rpm. |
Esperar (E)
En esta etapa la herramienta espera durante el tiempo especificado. La herramienta no gira mientras espera.
La etapa anterior a la etapa Esperar debe tener el Freno definido como Activado, es decir, Esperar debe comenzar con la herramienta detenida.
Parámetro | Descripción |
|---|---|
Tiempo de espera | El número de segundos que la herramienta estará detenida. |
Mantener posición | Activado o Desactivado. Si está Activada, la herramienta mantiene la posición durante el Objetivo de tiempo. |
Liberación de boca (LB)
Esta etapa opera la herramienta con la velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Solo se puede emplear esta etapa como última etapa en la ruta de apriete de un programa de apriete de múltiples etapas. Sin embargo, es posible añadir un punto de sincronización después de este paso.
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Predeterminado: 3º , debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
Apretar hasta par o ángulo (P|A)
Esta etapa ejecuta la herramienta a la velocidad n en la dirección hacia adelante hasta que se alcanza el par objetivo o el ángulo objetivo. Las mediciones de par y ángulo empiezan al comienzo del paso.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Aproximación (APROX)
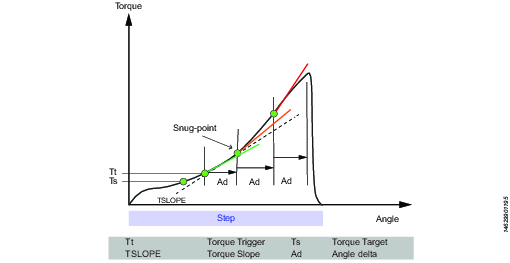
Esta etapa hace funcionar la herramienta con la velocidad en dirección de avance y, dependiendo del Tipo de aproximación, par o asentamiento, la conducta de la etapa es la que sigue:
Tipo de aproximación: Hasta par: La etapa se detiene cuando se encuentra el par objetivo especificado.
Tipo de aproximación: Hasta asentamiento: El cálculo de la gradiente de ajuste empieza en el nivel de gatillo de par especificado Tt. Si no se establece la activación por par, se inicia el cálculo de la gradiente al comenzar la etapa.
El cálculo de la pendiente se realiza entre dos puntos de ángulo con separación de Ad grados y se calcula de la forma siguiente: (Tn – Tn-1)/(An – An-1) y en cuanto las dos pendientes consecutivas son superiores a TSLOPE se encuentra el punto de asentamiento.
Parámetro | Descripción |
|---|---|
Tipo de aproximación | Hasta par o Hasta asentamiento. |
Par objetivo | Predeterminado: «No config.» Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Par del gatillo | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Par de gatillo. Predeterminado: «No config.» Debe ser > 0 |
Ángulo delta | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Ángulo delta. Predeterminado: "0". Debe ser > 0 |
Tasa de par | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Régimen de par. Predeterminado: "0". Debe ser > 0 |
L – Apretar hasta límite elástico
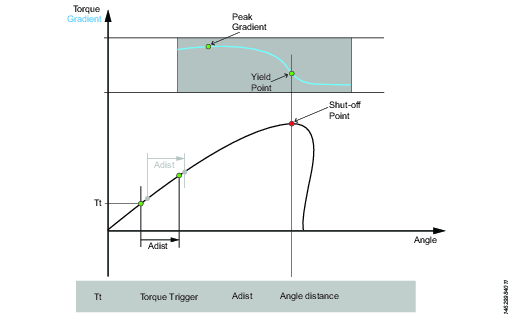
Esta estrategia opera la herramienta con la velocidad en la dirección hacia adelante hasta que se detecta el límite elástico. El límite elástico se encuentra monitorizando la gradiente desde el punto en el que el par supera el nivel del Par del gatillo, calculado según las mediciones de distancia del par y el ángulo. El parámetro de distancia del ángulo se establece según la dureza especificada de la junta.
Establecer la Ventana del ángulo de gradiente (para una junta dura, una junta blanda o para establecer manualmente la ventana del ángulo). Si se selecciona Manual, debe establecerse la Ventana del ángulo. Una junta se considera dura si el tornillo se aprieta hasta su par completo y gira 30 grados o menos después de apretarse hasta su punto de asentamiento. Una junta blanda gira 720 grados o más después de apretarse hasta su punto de asentamiento. El parámetro de dureza define la ventana del ángulo para calcular la gradiente. Cuanto más dura sea la junta, más pequeña es la ventana del ángulo.
Parámetro | Descripción |
|---|---|
Ventana de ángulo de gradiente | Especifica Ventana de ángulo:
|
Ventana de ángulo | Disponible cuando Ventana de ángulo de gradiente se establece en Manual. Debe ser > 0 e <= 100. |
Par del gatillo | La medición del ángulo comienza en este punto de activación. Debe ser >= 0 e < Par máx. de herramienta. |
Amortiguación | Frecuencia con la que se calcula el gradiente. Debe ser > 0 e < 100 e < Ventana de ángulo. |
Porcentaje de límite elástico | Debe ser >=20 % |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Tipo de filtro de par | El tipo de filtro:
|
Frecuencia de corte | Es necesario especificarla cuando se configura Tipo de filtro de par como Pase bajo:
|
Número de muestras | Es necesario especificarla cuando se configura Tipo de filtro de par como Media móvil:
|
Apretar hasta límite elástico, método 2 (YM2)
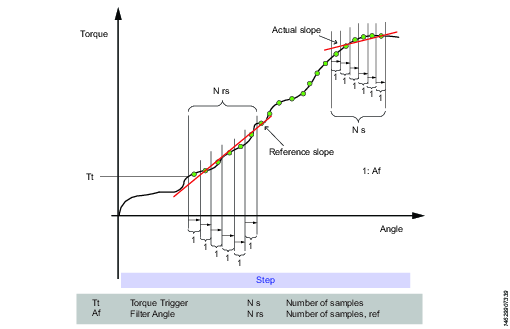
Esta etapa opera la herramienta con la velocidad especificada en la dirección hacia adelante hasta que se detecta el límite elástico.
La búsqueda del límite elástico se inicia cuando se ha alcanzado el par Tt. Se calcula la media del par en grados Af. Este procedimiento se repite N rs veces.
Se calcula una pendiente de referencia con regresión lineal en los N rs puntos. Tras esto, se calculan continuamente los valores medios nuevos en A f grados.
La pendiente actual se calcula con regresión lineal sobre los últimos puntos medios N s . El límite elástico se alcanza cuando la pendiente es inferior al Py % de la pendiente de referencia.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Filtrar ángulo | Predeterminado: 1. Debe ser > 0 |
Número de muestras | Predeterminado: 6. Debe ser > = 4 |
Número de muestras, ref. | Predeterminado: 6. Debe ser > = 4 |
Porcentaje de límite elástico | Predeterminado: 90%. Debe ser >20%. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
CP – Calibración de par
Esta etapa opera la herramienta con la velocidad especificada en la dirección hacia adelante hasta que se alcanza el objetivo de par.
Si lo configura como Principal o Secundario, puede calibrar uno de los dos transductores.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Transductor | Principal o secundario. Predeterminado: Principal. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Acoplar (E)
Esta etapa opera la herramienta en ambas direcciones hasta que la boca envuelve el tornillo. La etapa continúa hasta que se alcanza el Par objetivo o Ángulo objetivo, siempre que se haya establecido la opción Continuar si no se acopla en Sí. Si se alcanza el ángulo objetivo en cualquiera de las direcciones, ésta se invertirá. Limitar las iteraciones de búsqueda introduciendo el Máx. de intentos de acople. Si se alcanza el par objetivo en cualquiera de las direcciones, finalizará la etapa con el estado OK.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Predeterminado: 0. Debe ser > 0 |
Intentos de acoplamiento máx. | Predeterminado: 2. Debe ser > 0 |
Continuar si no se acopla | En caso de Sí, la etapa finalizará con estado OK incluso si los intentos de accionamiento no tienen éxito. En caso de No la etapa finalizará con estado NOK si los intentos de accionamiento no tienen éxito. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
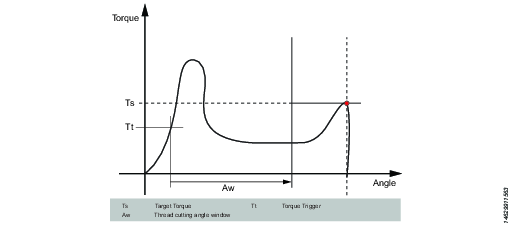
Corte de rosca hasta par (CRP)
La función Corte de rosca hasta par activa el apriete en el que el par de aproximación requerido es superior al par de Aproximación completa, por ejemplo cuando se aprietan capas finas de metal utilizando tornillos autorroscantes. La herramienta opera hacia adelante hasta que se alcanza el Ángulo de corte de rosca (Aw). La ventana del ángulo de corte de rosca se mide desde que el par supera por primera vez el Par de gatillo de corte de rosca (Ttc). Desde el punto en que se alcanza el ángulo de corte de rosca, la etapa continúa hasta que se alcanza el Par objetivo (Tt).
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ventana de ángulo de corte de rosca | Predeterminado: 0. Debe ser > 0 |
Par del gatillo | La medición del ángulo comienza en este punto de activación. |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Apretar hasta par y ángulo (P&A)
La herramienta funciona a la velocidad especificada en la dirección hacia adelante hasta que se alcanza tanto par objetivo como ángulo objetivo. El par objetivo y el ángulo objetivo deben ser > 0.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Predeterminado: 0. Debe ser > 0 |
Freno | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |









































