소개
이 섹션에서는, 제품에 대한 기본 정보와 주제에 사용된 형식 규칙도 찾을 수 있습니다.
개요
컨트롤러 프로그래밍의 차세대 소프트웨어인 ToolsTalk 2는 귀하의 라인 관리를 다음 단계로 이끌 준비가 되어있습니다. 클라이언트-서버 기반 소프트웨어 솔루션은 전체 라인 구조에 대한 완벽한 가시성과 추적성뿐만 아니라 빠르고 쉬운 구성을 제공하는 작업에 적합합니다. 환상적인 사용자 경험과 확장된 고유 기능을 바탕으로 구축되었습니다. 사용자의 필요에 따라 맞춤 조정을 하고 작업을 완료하기 위해 최적화 되었습니다. 내장된 단순한 기능 관리 시스템 FMS (Embedded Functional Management System)을 통해 언제든지 각 스테이션에 추가 기능을 위임 할 수 있습니다. 사용자 권한을 100% 사용자 정의할 수 있으므로, 복잡한 생산 시스템에서 품질 관리를 유지하고 생산 핵심 작업의 가동 시간을 늘릴 수 있습니다.
특징
PowerFocus6000, PF6 FlexSystem, 액세서리, 멀티 스텝, 필드 버스 및 소프트 plc의 구성 마스터
추적 분석 및 내보내기
라인 구조 관리
활성 디렉토리 및 사용자 관리
내장된 기능 관리 시스템
전체 기록이 포함된 프로그램 라이브러리
오프라인 및 전체 프로그래밍
라인 소프트웨어 가시성 및 관리
혜택
간단하고 사용자 친화적인 인터페이스로 인해 필요한 교육이 감소
전체 프로그램 및 오류 알림으로 결함 감소
빠르고 쉬운 라인 구성을 통한 효율적인 신제품 출시
프로그램 변경 시 가시성 및 추적성으로 인한 생산성 향상
실시간 결과 분석 및 라인 소프트웨어 관리로 인한 가동 시간 증가
사용자 정의 가능한 100% 사용자 접근 허가 덕분에 전체 라인 제어 가능
일반 정보 보호 규정(GDPR)
이 제품은 시스템 사용자 이름, 역할 및 IP 주소 등의 개인 식별 정보를 처리 할 수있는 가능성을 제공합니다. 이 처리 능력의 목적은 추적 및 적절한 액세스 관리를 통해 품질관리를 강화하는 것입니다.
귀하가 개인 정보를 처리하기로 결정한 경우 유럽연합의 개인 정보관리 규정 (EU, GDPR) 및 기타 관련 법률, 지침 및 규정을 포함하여 관련 개인 정보 보호 규칙을 숙지하고 준수해야 합니다. Atlas Copco는 사용자의 제품 사용에 대하여 책임질 수 없습니다.
법적 책임 및 경고
책임
작동 환경에서 많은 현상이 조임 과정에 영향을 미칠 수 있으므로 결과에 대해 반드시 확인을 해야 합니다. 적용 기준 및/또는 규정에 따라, 당사는 귀하가 조임 결과에 영향을 미칠 수 있는 사건 이후 설치된 토크 및 회전 방향을 점검할 것을 요구합니다. 그러한 사건에 대한 예는 나열된 사항을 포함하며 그것에만 국한되지 않습니다:
툴링 시스템의 초기 설치
부품 묶음, 볼트, 나사 묶음, 공구, 소프트웨어, 구성 또는 환경의 변경
공기 연결 또는 배선 변경
작업 라인 인체공학, 프로세스, 품질 절차 또는 관행에서의 변경
조작 기사 변경
조임 과정의 결과에 영향을 미치는 기타 변경 사항
필수 점검 사항:
영향을 받은 현상으로 인해 연결 부위 상태가 변경되지 않았는지 확인해야 합니다.
초기 설치, 유지 관리 또는 장비 수리 후에 해야 합니다.
교대 조당 최소한 한 번 또는 다른 적절한 주기로 점검해야 합니다.
개정 내역
문서 개정 | ToolsTalk 2 소프트웨어 버전 | 변경 |
|---|---|---|
12.0 | 2.14 |
|
11.0 | 2.13.4 |
|
10.0 | 2.13 |
|
9.0 | 2.12 |
|
8.0 | 2.11 | 해당 사항 없음 |
7.0 | 2.9 | 해당 사항 없음 |
6.0 | 2.8 | 해당 사항 없음 |
5.1 | 2.7.1 | 해당 사항 없음 |
5.0 | 2.7 | 해당 사항 없음 |
4.0 | 2.6 | 해당 사항 없음 |
3.0 | 2.5 | 해당 사항 없음 |
2.0 | 2.4 | 해당 사항 없음 |
1.0 | 2.3 | 초판 |
시스템 개요
제조 시스템은 도면의 기능 블록으로 구성될 수 있음:
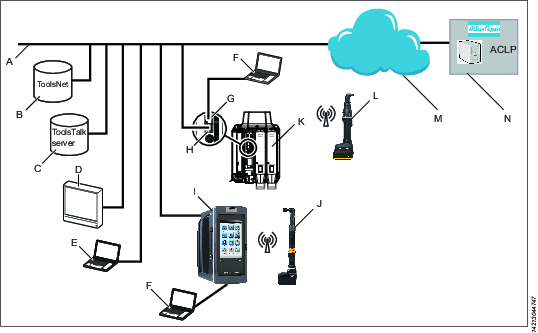
A | 공장 네트워크. | H | 컨트롤러 공장 포트: 공장 네트워크에 연결됨. |
B | ToolsNet 서버: 조임 결과 저장 및 통계 분석용. | I | Power Focus 6000 컨트롤러: 핸드헬드 공구와 함께 사용함. |
C | ToolsTalk 2 서버: 컨트롤러와 IXB 공구의 구성 및 매개변수를 설정함. | J | 핸드헬드 배터리 공구: 컨트롤러에 무선 연결됨. |
D | 산업용 PC (IPC): ToolsTalk 2 및 ToolsNet 서버에 대한 클라이언트 터미널로 사용할 수 있음. | K | PF6 Flex 컨트롤러: 고정재 공구와 함께 사용함. |
E | 공장 네트워크에 연결된 휴대용 컴퓨터: ToolsTalk 2 및 ToolsNet 서버에 대한 클라이언트 터미널로 사용할 수 있음. | L | IXB 핸드헬드 배터리 공구: 공장 네트워크에 무선 연결됨. |
F | 서비스 컴퓨터: 컨트롤러 또는 IXB 공구의 서비스 포트에 연결할 수 있음. | M | 인터넷 클라우드. |
G | 컨트롤러 서비스 포트: 서비스 컴퓨터를 연결하는 데 사용할 수 있음. | N | Atlas Copco Licensing Portal (ACLP): 위치는 Atlas Copco에 있으며 Functional Management System(FMS)의 라이선스 기능에 대한 지원을 제공함. |
소프트웨어 구조
아이콘 | 설명 |
|---|---|
 | ToolsTalk 2 시스템 사용자 관리. 언어, 온도, 토크 단위의 선택. |
 | 도움말 아이콘은 다음을 보여줍니다.
|
 | 공장 구조 공장 구조 작업 영역 내에서 개별 컨트롤러가 선택됩니다. 작업 영역은 여러 아이콘으로 구분됩니다. 각 아이콘 아래 메뉴는 데이터 및 매개변수 설정의 구성을 위해 사용됩니다. 아이콘은 컨트롤러 인터페이스 및 웹 인터페이스와 다르지만 구분 및 구성은 유사합니다. |
 | 조임 프로그램 선택하면 작업 영역은 기존의 조임 프로그램의 목록을 보여줍니다. 개별 프로그램을 선택하면 선택된 조임 프로그램에 대한 구성 및 설정 매개변수에 대한 다른 메뉴가 열립니다. |
 | 배치 시퀀스 선택하면 작업 영역은 기존의 배치 시퀀스의 목록을 보여줍니다. 개별 배치 시퀀스를 선택하면 선택된 배치 시퀀스에 대한 구성 및 설정 매개변수에 대한 다른 메뉴가 열립니다. |
 | 동기화 모드 아이콘은 병렬 다단계 기능을 갖춘 컨트롤러에서만 사용할 수 있습니다. 모든 동기화된 다단계 조임 프로그램에 대한 매개변수를 구성하고 설정하는 데 작업 영역을 사용합니다. |
 | 구성 선택하면 작업 영역은 기존 구성 목록을 보여줍니다. 선택된 장치 유형에 따라 매개변수 구성 및 설정을 위한 메뉴가 달라짐:
|
 | 공구 작업 영역은 컨트롤러에 연결된 공구를 표시하고, 공구 유지보수 간격 및 교정 데이터를 확인하고 설정하는 데 사용됩니다. |
 | 가상 스테이션 선택하면 작업 영역은 기존 가상 스테이션의 목록을 보여줍니다. 개별 가상 스테이션을 선택하면 다음 사항의 매개변수 구성 및 설정을 위한 다른 메뉴를 엶:
|
 | Controller information (컨트롤러 정보) 컨트롤러에 포함된 컨트롤러 하드웨어 및 소프트웨어 모듈. |
 | 필드 버스 및 SoftPLC 작업 영역은 필드버스, 비주기 데이터 및 SoftPLC의 구성에 사용됩니다. |
 | 설정
|
 | 결과 선택한 컨트롤러의 최신 조임 결과를 표시합니다. 결과는 테이블 형식 또는 그래픽 추적 형식으로 표시할 수 있습니다. |
 | 이벤트 선택한 컨트롤러에 대한 최신 조임 이벤트를 표시합니다. |
 | 라이브러리 컨트롤러 간에 재사용할 수 있는 라이브러리 템플릿을 관리하기 위한 하위 메뉴가 포함되어 있습니다. |
 | 컨트롤러 라이브러리 컨트롤러 구성의 라이브러리입니다. 서버 설치를 할 필요 없이 하나의 노트북 컴퓨터에 ToolsTalk 2 기능을 제공하는 스테이션 설정 모드에서 매우 유용합니다. |
 | 프로그램 탬플릿 라이브러리 이 라이브러리는 새로운 다단계 프로그램을 만들 때 사용하는 템플릿으로 저장된 다단계 프로그램이 포함되어 있습니다. 다단계 프로그램 템플릿을 편집하는 것은 해당 템플릿을 기반으로 하는 다단계 프로그램에 영향을 미치지 않습니다. |
 | 조임 프로그램 라이브러리 조임 프로그램의 라이브러리입니다. 이 라이브러리에 기존의 조임 프로그램을 복사할 수 있습니다. 라이브러리에서 조임 프로그램을 편집하면 해당 조임 프로그램이 적용되는 모든 컨트롤러에 영향을 미칠 것입니다. |
 | 구성 라이브러리 가상 스테이션, 장치, 부속품 구성 라이브러리입니다. 이 라이브러리에 기존 구성을 복사할 수 있습니다. 라이브러리 구성을 편집하면 구성이 적용되는 모든 컨트롤러에 영향을 미칠 것입니다. |
 | 필드버스 라이브러리 필드버스 구성의 라이브러리입니다. 이 라이브러리에 기존의 필드버스 구성을 복사할 수 있습니다. 필드버스 구성을 편집하면 필드버스 구성이 적용되는 모든 컨트롤러에 영향을 미칠 것입니다. |
 | 설정 라이브러리 다른 컨트롤러에 배포 할 수 있는 이벤트 구성을 위한 라이브러리입니다. 이벤트는 여기 또는 설정 |
 | 시스템 관리 소프트웨어 업데이트, 구성 매개변수의 가져오기/내보내기, 작업 스케줄링, 기능 관리 시스템의 기능을 포함합니다. |
 | 컨트롤러 소프트웨어 및 데이터 관리 ToolsTalk 2 서버를 통해 컨트롤러 소프트웨어를 관리합니다. |
 | 예약된 내보내기 및 가져오기 하나 또는 여러 컨트롤러에 영향을 미치는 반복적인 작업 및 ToolsTalk 2 서버에서 실행하는 작업의 스케줄을 지정합니다. |
 | 구성 비교 비교할 구성 파일을 선택합니다. |
 | 사용자 그룹 다른 사용자 그룹 및 폴더, 컨트롤러, 구성에 대한 사용자 그룹 권한을 관리합니다. |
 | 기능 관리 시스템 (FMS: Functionality Management System) ToolsTalk 2 서버를 통해 라이선스를 받은 컨트롤러 기능을 관리합니다. |
 | 프로그램 승인 프로그램 조임 및 풀기에 대한 승인을 관리합니다. |
 | 푸시 구성이 ToolsTalk 2 컨트롤러에 적용되었을 때 푸시 표시기가 나타납니다. 구성 및 매개변수 변경은 푸시 기능을 통해 컨트롤러로 복사됩니다. |
컨트롤러 아이콘은 컨트롤러 GUI 및 웹 GUI와 다르지만 각 아이콘의 구분 및 구성은 유사합니다.
구성 옵션
컨트롤러의 구성과 설정 수행 방법:
컨트롤러 GUI: 터치 스크린이 있는 Power Focus 6000 컨트롤러에 적용할 수 있습니다. 네트워크에 연결 여부와 관계 없이 컨트롤러를 구성할 수 있습니다.
웹 GUI: PC는 컨트롤러 서비스 포트에 직접 연결할 수 있으며, 컨트롤러가 네트워크에 연결되어 있고 IP 주소가 알려진 경우, 네트워크에 있는 모든 컴퓨터에서 컨트롤러에 액세스할 수 있습니다. 한 번에 하나의 컨트롤러에 액세스할 수 있습니다. Power Focus 6000의 경우, 웹 GUI는 컨트롤러 GUI와 같은 아이콘입니다. FlexController의 경우는 아이콘이 약간 다릅니다. 모든 컨트롤러에는 고유한 아이콘이 지정될 수 있습니다.
ToolsTalk 2 GUI: 컨트롤러가 ToolsTalk 2 서버에 연결되어 있는 경우 ToolsTalk 클라이언트(PC)는 ToolsTalk 2 GUI를 통해 연결된 모든 컨트롤러에 액세스할 수 있습니다. Power Focus 6000 컨트롤러와 FlexController를 전부 액세스할 수 있습니다. GUI는 전체 PC 화면을 사용하고, 다른 파티션과 다른 아이콘을 가지고 있지만, 동일한 기능을 제공합니다.
스테이션 설정 모드의 ToolsTalk 2 GUI: 서버 설치 없이 PC에 ToolsTalk 2 인터페이스를 제공합니다. PC는 컨트롤러 서비스 포트에 연결되고, 한 번에 하나의 컨트롤러에 대한 액세스를 제공합니다.
규칙
사용자 이해를 보조하기 위해 특정 형식 규칙이 이 문서 전체에 사용되었습니다. 아래는 사용된 형식 규칙 목록입니다.
요소 | 표기법 | 설명 | 출력 |
|---|---|---|---|
일반 강조 | 프로그램 작업 영역. | 특정 문자 요소를 돋보이게 하거나 강조합니다. | 볼드체 문자 |
그래픽 사용자 인터페이스 (GUI) 항목 | 기능 버튼을 선택합니다. | 항목에 대한 모든 참조는 GUI의 화면에서 찾을 수 있습니다. (예: 명령 버튼, 아이콘 이름 및 필드 이름) | 볼드체 문자 |
그래픽 사용자 인터페이스 (GUI) 경로 > | 일반적으로 GUI 상단에 있습니다. | GUI에서 위치를 기록하는 탐색 지원. | 예: 컨트롤러 > 프로그램 > 편집 |
사용자 입력 | 프로그램에 대한 설명을 입력하십시오. | 사용자는 모든 문자를 입력할 수 있습니다. | 볼드체 문자 |
파일 이름 | 내보낼 파일 이름을 입력합니다. | 내보낸 파일 또는 시스템에 가져온 파일. | 볼드 이텔릭체 문자 |
변수 및 매개변수 이름 | 내보낼 이름을 입력합니다. | 변수 및 매개변수 이름 (값이 아님). | 이텔릭체 문자 |
변수 및 매개변수 값 | 내보낼 값을 입력합니다. | 변수 및 매개변수 값. | 볼드체 대문자 |
시스템 출력 | Client.Domain.Models.ExportImportConfiguration | 시스템의 모든 문자 출력 | 모노스페이스 문자 |
외부 링크 | 문서 또는 주제 컨텐츠에 연결된 정보가 담긴 외부 사이트에 대한 링크입니다. 이러한 링크는 다음을 포함할 수 있습니다.
| 외부 사이트에 대한 선택 가능한 문자 | |
내부 문서 링크 |
사용할 수 있는 경우, 이러한 링크는 문자 아래에 제시됩니다. | 내부 사이트에 대한 선택 가능한 문자 |
라이선스 수준
라인 라이선서, 라인 컨피규레이터 및 라인 관리자
이 세 가지 버전은 히모두 ToolsTalk 2의 클라이언트-서버 기반으로 설치하지만 서로 다른 기능 세트를 갖고 있습니다. 라인 라인선서는 다른 라이선스가 설치되어 있지 않은 경우 ToolsTalk 2 새로 설치되는 위치에서 가장 작은 패키지입니다. ToolsTalk 2에 상태 라인 라인선서가 있을 경우, 모든 라인 관리자 및 라인 컨피규레이터 기능이 표시되지만, 사용자가 포함된 기능을 사용하려고 할 때마다 경고 메시지가 나타납니다.
ToolsTalk 2는 다운 그레이드가 시작된 경우에만 라인 관리자에서 생성된 데이터를 제거, 연결 해제 또는 삭제합니다. 예를 들어 라인 구성기 라이선스로 다운그레이드하거나 라인 관리자 라이선스의 평가판 사용 기간이 만료된 경우 이런 현상이 발생할 수 있습니다.
스테이션 설정
이것은 모든 구성 요소가 컴퓨터에 로컬로 배치되어 일대일 연결을 제공하는 Tools Talk2의 버전입니다. 스테이션 설정은 SQL 서버 데이터베이스 연결 없이 실행되며 한 번에 하나의 연결된 컨트롤러만 사용할 수 있도록 빌트인 제한이 있습니다. 스테이션 설정을 사용하려면 유효한 라이선스가 필요합니다. 유효 라이선스 없는 경우, 경고 메시지가 표시됩니다.
라이선스가 없는 스테이션 설정은 하나의 가상 스테이션을 갖을 수 있으며 라이선스 서버에 대한 유효성도 검증됩니다.
라이선스 기능
기호 | 설명 |
|---|---|
X | 전체 기능입니다. |
X¹ | 연결, 연결 끊기 및 다시 시작이 활성화되었습니다. |
X² | 변경 시 푸시가 활성화됩니다. |
X³ | 사용자 지정 섹션, 다시 시작, 그리고 마우스 오른쪽 버튼 기능이 활성화되었습니다. |
X⁴ | 데이터베이스 유지 관리 기능만 활성화되었습니다. |
X⁵ | 읽기 전용, 프로그램 내보내기가 활성화되었습니다. |
라인 라이선서 | 라인 컨피규레이터 | 스테이션 설정 라이선스가 부여됨 | 라인 관리자 | |
|---|---|---|---|---|
공장 구조 | ||||
마우스 오른쪽 버튼 클릭 - 새 컨트롤러 추가 | X | X | X | X |
마우스 오른쪽 버튼 클릭 기능 | X¹ | X | X | X |
프로그램 구성의 기록 | X | |||
조임 프로그램 | X⁵ | X | X | X |
배치 시퀀스 | X⁵ | X | X | X |
소스 | X⁵ | X | X | X |
구성 | X⁵ | X | X | X |
공구 | X⁵ | X | X | X |
가상 스테이션 | X⁵ | X | X | X |
컨트롤러 | X⁵ | X | X | X |
설정 | X⁵ | X | X | X |
필드버스 | X² | X | X | X |
SoftPLC | X | X | X | |
결과 | X | X | X | |
이벤트 | X | X | X | X |
라이브러리 | ||||
조임 프로그램 | X | |||
구성 | X | |||
필드버스 | X | |||
설정 | X | |||
프로그램 템플릿 | X | |||
컨트롤러 구성 | X | X | X | |
시스템 관리 | ||||
컨트롤러 소프트웨어 및 데이터 관리 | X³ | X³ | X | |
예약된 작업 | X⁴ | X⁴ | X⁴ | X |
기능 관리 시스템 (FMS: Functionality Management System) | X | X | X | X |
사용자 그룹 | X | |||
프로그램 승인 | X |
설치 및 업그레이드
이 섹션에서는 제품의 초기 설치 또는 한 버전에서 다른 버전으로 업그레이드 할 때 도움이 되는 정보를 찾을 수 있습니다.
설치 제한
호환성 행렬
별도로 명시한 경우를 제외하고, 모든 버전의 ToolsTalk 2소프트웨어는 역호환됩니다.
ToolsTalk2 | PF6 FlexSystem | PF6000 | PF6000 StepSync | Atlas Copco 데이터 통신 버전 | IXB | PF8 | PF8 StepSync |
|---|---|---|---|---|---|---|---|
2.3 | 해당 사항 없음 | 2.0, 2.1, 2.1.1, 2.3 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.4 | 해당 사항 없음 | 2.4 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.5 | 1.2 | 2.4 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.6 | 1.2 | 2.5 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.7 | 1.3 | 2.6 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.7.1 | 1.3.1 | 2.6 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.8 | 1.3.1 | 2.7 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.9 | 2.0 | 2.7 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.11 | 2.1 | 2.8 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.12 | 3.0 | 3.0 | 3.0 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.13 | 3.1 | 3.1.1 | 3.1.1 | 1.7 | 해당 사항 없음 | 해당 사항 없음 | 해당 사항 없음 |
2.14 | 3.3 | 3.3 | 3.3 | 1.9 | 3.3 | 해당 사항 없음 | 해당 사항 없음 |
ToolsTalk 2은 Atlas Copco 데이터 통신의 상위 버전으로 실행할 수 있습니다. 매트릭스에 언급된 Atlas Copco 데이터 통신 버전은 ToolsTalk 2 소프트웨어와 호환되는 가장 낮은 버전으로 간주됩니다.
설치 또는 업그레이드 전 확인 사항
동일한 컴퓨터에 스테이션 설치와 클라이언트-서버 설치를 모두 설정하는 것은 권장하지 않습니다 원치 않는 설치의 구성 요소에서 컴퓨터를 제거하고 삭제해야 합니다.
서버 설치
Microsoft SQL 데이터베이스, ToolsTalk 2 서버 애플리케이션과 ToolsTalk 2 클라이언트 애플리케이션은 전부 동일한 컴퓨터에 설치할 수 있습니다.
설치 시작 전 요구 사항:
서버 애플리케이션을 설치할 컴퓨터에 대한 관리자 권한.
클라이언트 애플리케이션을 설치할 컴퓨터에 대한 관리자 권한.
나열된 전제 조건에 따른 컴퓨터 및 프로그램.
나열된 전제 조건에 따른 64비트 Microsoft SQL 데이터베이스의 완전한 설치.
서버 애플리케이션을 위한 실행 파일.
클라이언트 애플리케이션을 위한 실행 파일.
Atlas Copco Data Communication (ACDC)가 설치되고 실행 중이며 ToolsTalk 2의 현재 버전과 호환됩니다. (ToolsTalk 2 2.13 버전의 상위 버전에만 해당) 자세한 내용은 Atlas Copco Data Communication 설치 사용자 설명서를 참조하세요.
스테이션 설정
설치 시작 전 요구 사항:
애플리케이션을 설치할 컴퓨터에 대한 관리자 권한.
나열된 전제 조건에 따른 컴퓨터 및 프로그램.
스테이션 설정 애플리케이션을 위한 실행 파일.
데이터베이스 요구 사항
모든 컨트롤러 데이터 및 구성은 데이터베이스 카탈로그에 저장됩니다. 데이터베이스는 표준 64비트 Microsoft SQL 데이터베이스입니다.
Microsoft SQL 데이터베이스의 설치는 이 문서에서 설명하지 않습니다. 표준 설치를 수행하는 것을 권장합니다.
The Microsoft SQL 데이터베이스는 ToolsTalk 2 응용프로그램과 동일한 서버 또는 네트워크에 위치할 수 있습니다.
데이터베이스가 다른 곳에 있는 경우, 방화벽을 데이터베이스와 ToolsTalk 2 애플리케이션 서버 사이에 적절하게 구성해야 합니다.
Atlas Copco 데이터 통신 서버의 IP 주소를 반드시 알고 있어야 하며 ToolsTalk 2에 연결된 모든 컨트롤러에 입력해야 합니다.
원격 연결을 사용 중인 경우 ToolsTalk 2 애플리케이션을 호스팅 하는 서버의 주소는 클라이언트 PC에서 알고 있어야 합니다.
Microsoft SQL 데이터베이스 설치 시 필수
64비트 Microsoft SQL.
Microsoft SQL 서버 인증 및 Windows 인증을 전부 선택합니다.
Microsoft SQL 데이터베이스를 설치하는 경우 권장됨
설치에서 Management Studio를 포함합니다.
기본 인스턴스를 사용합니다.
컴퓨터 요구 사항
ToolsTalk 2 에코시스템이 필요로 하는 기능:
클라이언트, 서버, 스테이션 설정, ClickOnce를 위해 64비트가 필요합니다.
영역 | 범주 | 최소 요구 사항 | ToolsTalk 2 릴리스 버전 | 메모 |
|---|---|---|---|---|
서버 소프트웨어 요구 사항 | 데이터베이스 | SQL 서버 2014 R2, 또는 이후 버전 SQL Express 2014 R2, 또는 이후 버전 (호환 가능하지만 권장되지 않음) | 데이터베이스는 동일한 컴퓨터에서 로컬 위치, 또는 원격 데이터베이스 서버에 설치될 수 있습니다. | |
Java | 버전 8 이상 | ≥2.3 | 64비트 버전 | |
.NET Framework | 버전 4.6 | 2.3 - 2.4 | ||
버전 4.6.2 | 2.5 - 2.12 | |||
버전 4.8 | 2.13 - 현재 버전 | |||
서버 하드웨어 요구 사항 | 프로세서 | 듀얼 코어 2.70 GHz 인텔 제논 이상 | 이 사양은 필요한 성능에 대한 참조 사양일 뿐입니다. | |
메모리 (램) | 4GB | 이 사양은 필요한 성능에 대한 참조 사양일 뿐입니다. | ||
디스크 공간 | 50 GB | 데이터베이스는 시간이 지남에 따라 커진다는 사실에 유념해주십시오. 구성 및 구성 변경 사항은 데이터베이스에 저장됩니다. 더 많은 컨트롤러는 데이터베이스에 더 많은 정보를 추가합니다. | ||
디스크 속도 | 5400RPM 이상 | |||
PC 클라이언트 요구 사항 | 운영 체제 | Windows 10 Windows 7 | 2.14 2.3 - 2.13 | ToolsTalk 2 2.14 버전은 Windows 7을 지원하지 않습니다. |
.NET Framework | 버전 4.6 | 2.3 - 2.4 | ||
버전 4.6.2 | ≥2.5 - 2.12 | |||
버전 4.8 | 2.13 - 현재 버전 | |||
사용자 권한 | 데이터베이스 액세스 | 시스템 관리자 액세스 또는 이와 유사한 권한 | 설치를 수행하는 사용자는 데이터베이스에 사용자를 만들 수 있는 관리자 권한이 있어야 합니다. | |
Windows 액세스 | 관리자 계정 | 애플리케이션 및 종속 요소를 설치하기 위해 필요합니다. |
라이선스 요구 사항
Functional Management System(FMS)을 허가 받은 기능 품목에 사용할 때는 Atlas Copco 라이선스 서버가 필요합니다.
라이선스 서버는 서버 설치 파일에 포함되어 있습니다. 올바른 설치를 위해 JAVA_HOME 시스템 변수는 64비트 Java 설치에서 정확한 경로와 지점이 있어야 합니다.
FMS는 클라이언트-서버 설치에만 사용할 수 있고, 스테이션 설정 설치에 적용할 수 없습니다.
설치 순서
모든 ToolsTalk 2 애플리케이션의 설치 순서는 다음과 같아야 합니다.
설치하기 전에 모든 컴퓨터 및 데이터베이스 요구 사항이 충족되는지 확인해 주세요.
Microsoft SQL 서버를 설치하세요.

올바른 설치 절차에 대한 자세한 내용은 다음 웹 사이트를 참조하세요. https://docs.microsoft.com/en-us/sql/database-engine/install-windows/install-sql-server?view=sql-server-ver15
가능한 경우 Atlas Copco Data Communication을 설치하세요.
자세한 내용은 Atlas Copco Data Communication 설치 안내서를 참조하세요.
필요한 ToolsTalk 2 애플리케이션을 설치하세요.
ToolsTalk 2 클라이언트 애플리케이션을 설치하거나 시작 매뉴에서 애플리케이션을 실행하거나 필요한 경우 바로 가기 메뉴를 생성하는 경우 ToolsTalk 2를 배치하세요.
ToolsTalk 2 애플리케이션에 라이센스를 부여하면 가입한 해당 기능을 이용할 수 있습니다.
소프트웨어 설치
ToolsTalk2 구성 창
ToolsTalk 2 구성을 사용하여ToolsTalk 2 소프트웨어의 설치를 먼저 완료한 다음 다양한 설치 매개변수를 구성할 수 있습니다. 각 설치 유형에 대한 ToolsTalk 2 구성은 설치 후 시작 메뉴에서 바로 가기 메뉴로 제공되므로 언제든지 설치 매개변수를 변경하기 위해 엑세스할 수 있습니다.
기본 설치 위치
설치 | 기본 위치 | 비고 |
|---|---|---|
ToolsTalk 2 Server | C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\ | 사용자가 원하는 위치로 변경할 수 있습니다. |
ToolsTalk 2 ClickOnce | C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ | 사용자가 원하는 위치로 변경할 수 있습니다. |
ToolsTalk 2 Client | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\ | 사용자가 원하는 위치로 변경할 수 있습니다. |
ToolsTalk 2 StationSetup | C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ | 사용자가 원하는 위치로 변경할 수 있습니다. |
AtlasCopco FMS | C:\ProgramData\AtlasCopcoFMS\ | 기본 경로를 변경할 수 없습니다! |
Flexera Logs | C:\Windows\ServiceProfiles\NetworkService\Flexnetls\acopco\logs | 기본 경로를 변경할 수 없습니다! |
ToolsTalk 서버 애플리케이션을 설치하기 전에 확인해야 할 사항
ToolsTalk 2 서버 설치를 시작하기 전에 설치 또는 업그레이드 전에 확인해야할 사항 절에 설명된 대로 모든 요구 사항이 충족되었는지 확인해 주세요.
서버 응용프로그램을 설치하기 전에, Atlas Copco Data Communication(ACDC)이 설치되어 실행 중인 버전이 ToolsTalk 2의 현재 버전과 호환되는지 확인하세요. (ToolsTalk 2 2.13 이상 버전에만 해당) Atlas Copco Data Communication 설치 설명서를 참조하십시오.
ToolsTalkServer<xxx>.exe 실행 파일을 컴퓨터의 원하는 폴더에 배치하세요. <xxx>은(는) 파일 버전을 나타냅니다.
실행 파일을 더블 클릭합니다.
이 앱이 장치를 변경할 수 있도록 허용하시겠습니까? 질문에 예를 선택하세요.
Atlas Copco Tools Talk 서버 - InstallShield 마법사 창에서 예를 선택하여 계속 진행해 주세요.
라이선그 계약 내용을 읽고 라이선스 계약의 조항을 수락합니다를 선택하세요. 다음을 선택하여 계속 진행해 주세요.
라이선스 계약을 인쇄하려면 인쇄를 선택하세요.
다른 위치에 애플리케이션을 설치하려면 변경...을 선택하세요. 기본 위치는 C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\입니다.
다음을 선택하여 계속 진행해 주세요.
설치를 선택하여 설치를 마무리하세요.
완료를 선택하여 설치를 마무리 하시면 ToolsTalk 2 Configuration 창이 열리거나 Windows의 사용자 액세스 제어 대화 상자가 표시될 수 있습니다.
Windows에서 사용자 액세스 제어 대화 상자에 권한을 요청하는 메시지가 표시되는 경우, 이 앱이 장치를 변경할 수 있도록 허락하시겠습니까?의 질문에 예를 선택해 주세요.
설치가 완료되면, ToolsTalk 2 구성 창이 열립니다.
아니오를 선택하면, ToolsTalk 2 구성 창이 자동으로 열리지 않으며 Windows 시작 매뉴에서 해당 창에 액세스해야 합니다. Windows 시작 메뉴에서 ToolsTalk 2 구성자가 열리면, ToolsTalk 2 구성 창의 맨 아래에서 강제 초기화를 선택하여 설치 절차를 완료해 주세요.
설치하는 동안에 오류가 발생하거나, 단계가 불분명하거나, 매개변수 이름 또는 값이 불분명하면 문제 해결 절에서 자세한 내용을 확인하세요.
서버 설정 메뉴에서 매개변수를 입력하세요.
저장을 선택하면 서버 설정이 저장되고 다시 시작이 시작됩니다.
데이터베이스 설치 설정 시작하고 완료하기 전에저장을 선택하면, 변경 사항이 승인되었지만 종속 Windows 서비스 제어에 실패했습니다.라는 오류가 발생합니다.
데이터베이스 설치 설정으로 이동하여 사용자 이름과 비밀번호를 입력하고 연결 테스트를 선택하여 데이터베이스 연결을 테스트하세요.
사용자 이름과 비밀번호는 Microsoft SQL 서버 설치에 사용한 것과 동일해야 합니다.
데이터베이스 설치를 선택하세요.
데이터베이스를 성공적으로 설치하면, 데이터베이스 생성 성공 메시지가 표시됩니다.
저장과 닫기를 차례대로 선택해 주세요.
종속 서비스가 시작되지 않았다는 알림을 받으신 경우, FNLS-acopco 서비스를 다시 시작하시고 ToolsTalk 2 구성을 다시 시작하세요. 두 서비스가 모두 실행 중이면, 설치를 계속하세요.
서버 설정 매개변수
매개변수 | 설명 |
|---|---|
SQL 서버 주소 | SQL 서버의 IP 또는 호스트 이름 Microsoft Windows Defender 방화벽은 네트워크를 통한 SQL Server 연결을 방지합니다. 그러므로, TCP/IP를 사용하여 연결을 수락하도록 SQL Server를 구성해야 합니다. 이 설정은 Windows 컴퓨터 관리의 SQL 서버 구성 관리자에서 수정할 수 있습니다. 컴퓨터 관리 -> SQL 서버 구성 관리자 -> SQL 서버 네트워크 구성 -> MSSQLSERVER의 프로토콜 -> TCP/IP -> 사용 |
데이터베이스 이름 | ToolsTalk 2에 의해 사용되는 데이터베이스/카탈로그 데이터베이스는 아직 존재하지 않는 경우 데이터베이스 설치 중에 생성됩니다. |
매개변수 | 설명 |
|---|---|
인증 모드 | 사용자 권한 확인에 사용되는 인증 모드 Windows (활성 디렉토리) 또는 없음을 선택하세요. |
활성 디렉로리 그룹 | 선택한 인증 모드가 Windows인 경우에만 표시됩니다. 사용자가 구성원이어야 하는 활성 디렉토리 그룹을 지정하세요. 예: DOMAIN\GROUP |
서버 주소: | ToolsTalk 2 서버의 IP 또는 호스트 이름 |
웹 애플리케이션 포트 | ToolsTalk 2의 통신 포트 |
컨트롤러 포트 | 포트 9016이 기본 컨트롤러 포트로 사용됩니다. 포트 9016을 사용하시는 경우 이 포트가 열려있고 연결할 수 있는지 확인하세요. 그렇지 않은 경우, 응용 프로그램이 작동하지 않습니다. 포트 80은 컨트롤러를 연결/연결 해제/추가하는 기능을 ToolsTalk 2에서 컨트롤러와 상호 작용하기 위해 사용할 때 사용됩니다. |
입력한 컨트롤러 포트가 열려있고 연결할 수 있는지 확인해 주세요!
매개변수 | 설명 |
|---|---|
컨트롤러 백업 폴더 | 컨트롤러의 백업이 위치할 폴더를 지정하세요. |
매개변수 | 설명 |
|---|---|
서버 주소: | Atlas Copco Data Communication 서버의 IP 또는 호스트 이름 |
웹 API 포트 | 웹 API의 포트 |
신호R 포트 | 신호R의 포트 |
데이터베이스 설치 설정
매개변수 | 설명 |
|---|---|
사용자 이름 | 데이터베이스/카탈로그를 생성하기 위한 크리덴셜이 있는 데이터베이스 사용자의 사용자 이름 일반적으로 시스템 관리자 크리덴셜입니다. |
비밀번호 | 암호를 입력하세요. 일반적으로 시스템 관리자 크리덴셜입니다. |
매개변수 | 설명 |
|---|---|
수동 스크립트 | 데이터베이스가 수동으로 작성되었는지의 여부를 지정합니다. 이 확인란이 선택된 경우 ToolsTalk 2은 사용자가 SQL 카탈로그와 기본 사용자를 이미 수동으로 생성했을 것으로 예상합니다. 입력한 사용자 이름 및 암호는 SQL 서버에 연결하고 구성 파일에 일반 텍스트로 저정되는 기본 크리덴셜로 지정됩니다. 이 설정은 데이터베이스 카탈로그 및 사용자를 직접 작성한 경우에만 사용해야 합니다. |
ToolsTalk 2 애플리케이션은 시작 메뉴에서 사용할 수 있습니다.
클라이언트 애플리케이션 설치
ToolsTalk 2 서버 설치를 시작하기 전에 설치 전 절에 설명된 대로 모든 요구 사항이 충족되었는지 확인합니다.
ToolsTalkClientxxx>.exe 실행 파일을 컴퓨터의 원하는 폴더에 배치합니다. <xxx>은(는) 파일 버전을 나타냅니다.
실행 파일을 더블 클릭합니다.
이 앱이 장치를 변경할 수 있도록 허용하시겠습니까? 질문에 예를 선택합니다.
Atlas Copco Tools Talk 서버 - InstallShield 마법사 창에서 예를 선택하여 계속 진행합니다.
라이선그 계약 내용을 읽고 라이선스 계약의 조항을 수락합니다를 선택합니다. 다음을 선택하여 계속 진행합니다.
라이선스 계약을 인쇄하려면 인쇄를 선택합니다.
다른 위치에 애플리케이션을 설치하려면 변경...을 선택합니다. 기본 위치는 C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\입니다.
다음을 선택하여 계속 진행합니다.
설치를 선택하여 설치를 마무리 합니다.
마침을 선택하여 설치를 완료합니다.
설치하는 동안에 오류가 발생하거나, 단계가 불분명하거나, 매개변수 이름 또는 값이 불분명하면 문제 해결 절에서 자세한 내용을 확인하십시오.
설치가 완료되면, ToolsTalk 2 구성 창이 열립니다.
클라이언트 설정에 매개변수를 입력하고 저장을 선택합니다.
서버 설정 매개변수
설명
인증 모드
사용자 권한 확인에 사용되는 인증 모드 Windows (활성 디렉토리) 또는 없음을 선택합니다.
서버 주소:
ToolsTalk 2 서버의 IP 또는 호스트 이름
웹 애플리케이션 포트
ToolsTalk 2의 통신 포트
서비스 URL을 IP 주소로 변환하기
켜짐 또는 꺼짐으로 변환됩니다. 켜짐을 선택하면 호스트 이름이 주소에 사용된 경우 IP 주소로 변환됩니다.
ToolsTalk 2 애플리케이션이 설치되고 바탕화면에 바로가기 메뉴가 제공됩니다.
ClickOnce를 사용하여 클라이언트 설치
ToolsTalkServerClient<xxx>.exe 실행 파일을 컴퓨터의 원하는 폴더에 배치하세요. <xxx>은(는) 파일 버전을 나타냅니다.
실행 파일을 더블 클릭하세요.
이 앱이 장치를 변경할 수 있도록 허용하시겠습니까? 질문에 예를 선택하세요.
Atlas Copco Tools Talk 서버 - InstallShield 마법사 창에서 다음을 선택하여 계속 진행해 주세요.
라이선그 계약 내용을 읽고 라이선스 계약의 조항을 수락합니다를 선택하세요. 다음을 선택하여 계속 진행하세요.
라이선스 계약을 인쇄하려면 인쇄를 선택하세요.
다른 위치에 애플리케이션을 설치하려면 변경...을 선택하세요. 기본 위치는 C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\입니다.
다음을 선택하여 계속 진행해 주세요.
설치를 선택하여 설치를 마무리하세요.
완료를 선택하여 설치를 마무리 하시면 ToolsTalk 2 Configuration 창이 열리거나 Windows의 사용자 액세스 제어 대화 상자가 표시될 수 있습니다.
Windows에서 사용자 액세스 제어 대화 상자에 권한을 요청하는 메시지가 표시되는 경우, 이 앱이 장치를 변경할 수 있도록 허락하시겠습니까?의 질문에 예를 선택해 주세요.
설치가 완료되면, ToolsTalk 2 구성 창이 열립니다.
아니오를 선택하면, ToolsTalk 2 구성 창이 자동으로 열리지 않으며 Windows 시작 매뉴에서 해당 창에 액세스해야 합니다. Windows 시작 메뉴에서 ToolsTalk 2 구성자가 열리면, ToolsTalk 2 구성 창의 맨 아래에서 강제 초기화를 선택하여 설치 절차를 완료해 주세요.
설치하는 동안에 오류가 발생하거나, 단계가 불분명하거나, 매개변수 이름 또는 값이 불분명하면 문제 해결 절에서 자세한 내용을 확인하십시오.
서버 설정 메뉴에서 매개변수를 입력하세요.
저장을 선택하면 서버 설정이 저장되고 다시 시작이 시작됩니다.
데이터베이스 설치 설정 시작하고 완료하기 전에저장을 선택하면, 변경 사항이 승인되었지만 종속 Windows 서비스 제어에 실패했습니다.라는 오류가 발생합니다.
데이터베이스 설치 설정으로 이동하여 사용자 이름과 비밀번호를 입력하고 연결 테스트를 선택하여 데이터베이스 연결을 테스트하세요.
사용자 이름과 비밀번호는 Microsoft SQL 서버 설치에 사용한 것과 동일해야 합니다.
데이터베이스 설치를 선택하세요.
데이터베이스를 성공적으로 설치하면, 데이터베이스 생성 성공 메시지가 표시됩니다.
저장과 닫기를 차례대로 선택해 주세요.
종속 서비스가 시작되지 않았다는 알림을 받으신 경우, FNLS-acopco 서비스를 다시 시작하시고 ToolsTalk 2 구성을 다시 시작하세요. 두 서비스가 모두 실행 중이면, 설치를 계속하세요.
서버 설정 매개변수
매개변수 | 설명 |
|---|---|
SQL 서버 주소 | SQL 서버의 IP 또는 호스트 이름 Microsoft Windows Defender 방화벽은 네트워크를 통한 SQL Server 연결을 방지합니다. 그러므로, TCP/IP를 사용하여 연결을 수락하도록 SQL Server를 구성해야 합니다. 이 설정은 Windows 컴퓨터 관리의 SQL 서버 구성 관리자에서 수정할 수 있습니다. 컴퓨터 관리 -> SQL 서버 구성 관리자 -> SQL 서버 네트워크 구성 -> MSSQLSERVER의 프로토콜 -> TCP/IP -> 사용 |
데이터베이스 이름 | ToolsTalk 2에 의해 사용되는 데이터베이스/카탈로그 데이터베이스는 아직 존재하지 않는 경우 데이터베이스 설치 중에 생성됩니다. |
매개변수 | 설명 |
|---|---|
인증 모드 | 사용자 권한 확인에 사용되는 인증 모드 Windows (활성 디렉토리) 또는 없음을 선택하세요. |
활성 디렉로리 그룹 | 선택한 인증 모드가 Windows인 경우에만 표시됩니다. 사용자가 구성원이어야 하는 활성 디렉토리 그룹을 지정하세요. 예: DOMAIN\GROUP |
서버 주소: | ToolsTalk 2 서버의 IP 또는 호스트 이름 |
웹 애플리케이션 포트 | ToolsTalk 2의 통신 포트 |
컨트롤러 포트 | 포트 9016이 기본 컨트롤러 포트로 사용됩니다. 포트 9016을 사용하시는 경우 이 포트가 열려있고 연결할 수 있는지 확인하세요. 그렇지 않은 경우, 응용 프로그램이 작동하지 않습니다. 포트 80은 컨트롤러를 연결/연결 해제/추가하는 기능을 ToolsTalk 2에서 컨트롤러와 상호 작용하기 위해 사용할 때 사용됩니다. |
서비스 URL을 IP 주소로 변환하기 | 켜짐 또는 꺼짐으로 변환해 주세요. 켜짐을 선택하면 호스트 이름이 주소에 사용된 경우 IP 주소로 변환됩니다. |
입력한 컨트롤러 포트가 열려있고 연결할 수 있는지 확인해 주세요!
매개변수 | 설명 |
|---|---|
컨트롤러 백업 폴더 | 컨트롤러의 백업이 위치할 폴더를 지정하세요. |
활성 디렉토리 그룹 및 컨트롤러 백업 폴더의 기본값 설정은 "비어있음"입니다.
매개변수 | 설명 |
|---|---|
서버 주소: | Atlas Copco Data Communication 서버의 IP 또는 호스트 이름 |
웹 API 포트 | 웹 API의 포트 |
신호R 포트 | 신호R의 포트 |
데이터베이스 설치 설정
매개변수 | 설명 |
|---|---|
사용자 이름 | 데이터베이스/카탈로그를 생성하기 위한 크리덴셜이 있는 데이터베이스 사용자의 사용자 이름 일반적으로 시스템 관리자 크리덴셜입니다. |
비밀번호 | 암호를 입력하세요. 일반적으로 시스템 관리자 크리덴셜입니다. |
매개변수 | 설명 |
|---|---|
수동 스크립트 | 데이터베이스가 수동으로 작성되었는지의 여부를 지정합니다. 이 확인란이 선택된 경우 ToolsTalk 2은 사용자가 SQL 카탈로그와 기본 사용자를 이미 수동으로 생성했을 것으로 예상합니다. 입력한 사용자 이름 및 암호는 SQL 서버에 연결하고 구성 파일에 일반 텍스트로 저정되는 기본 크리덴셜로 지정됩니다. 이 설정은 데이터베이스 카탈로그 및 사용자를 직접 작성한 경우에만 사용해야 합니다. |
클라이언트를 원격 컴퓨터에 배포하기
웹 브라우저를 통해 링크를 사용하여 서버로 이동하세요.
http://<FULL COMPUTER NAME>:<PORT NUMBER>/deploym

<FULL COMPUTER NAME>과 <PORT NUMBER>를 교체하세요.
<FULL COMPUTER NAME>이 서버와 데이터베이스가 있는 곳과 일치하는지 확인해 주세요. 전체 컴퓨터 이름 [TOOLSE277256.ATLASCOPCO.COM] 또는 컴퓨터 이름 [TOOLSE277256]이 설정된 경우, DNS 서버가 반드시 존재하고 컨트롤러에 설정되어 있어야 합니다. 그렇지 않으면, 컨트롤러를 ToolsTalk 2 환경에 추가할 수 없습니다.
컴퓨터에서 ToolsTalk.Client.WPF.Desktop.application 실행 파일을 저장하세요.
메시지가 나타나면 실행 파일을 두 번 클릭하시거나, 요청 받으면 열기를 선택하세요.
ToolsTalk 2 클라이언트가 설치된 최신 버전으로 열립니다.
ToolsTalk 2 클라이언트는 ClickOnce를 사용하여 항상 최신 서버 버전을 엽니다.
클라이언트를 로컬 컴퓨터에 배포하기
ClickOnce가 기본 폴더에 설치되어 있는 경우, “C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ClientDeploy”로 이동하여 ToolsTalk.Client.WPF.Desktop 애플리케이션 매니페스트 파일을 더블 클릭하여 클라이언트를 배포해 주세요.
설치가 완료되면, ToolsTalk 2 아이콘이 바탕화면에 생성됩니다.
스테이션 설정 애플리케이션 설치
간략 스테이션 설정 설치는 전체 컨트롤러 구성 기능을 가지고 있지만, 또한 몇 가지 제한 사항이 있습니다.
전체 설치는 작은 공간을 차지하며, 휴대용 컴퓨터에 설치되어 있습니다.
한 번에 한 물리적 컨트롤러만 관리할 수 있습니다.
컴퓨터는 정상 활동의 중단을 방지하기 위해 컨트롤러의 서비스 포트에 연결됩니다.
응용 분야
이 작동 모드의 일반적인 응용 분야:
고객의 네트워크에 연결하지 않고 컨트롤러의 서비스 포트에 연결하고 ToolsTalk 2를 사용하여 컨트롤러에 액세스할 수 있습니다.
컨트롤러 라이브러리 기능을 사용하는 컨트롤러의 오프라인 구성. 구성 파일은 나중에 검증을 위한 실제 컨트롤러로 전송될 수 있습니다.
디버깅 작업에 매우 도움이 되는 컨트롤러의 구성을 쉽게 내보냅니다.
ToolsTalk 2 스테이션 설정 설치를 시작하기 전에 설치 전 또는 업그레이드 절에 설명된 대로 모든 요구 사항이 충족되었는지 확인해 주세요.
ToolsTalkStationSetup<xxx>.exe 실행 파일을 컴퓨터의 원하는 폴더에 배치하세요. <xxx>은(는) 파일 버전을 나타냅니다.
실행 파일을 더블 클릭합니다.
이 앱이 장치를 변경할 수 있도록 허용하시겠습니까? 질문에 예를 선택하세요.
Atlas Copco Tools Talk 서버 - InstallShield 마법사 창에서 예를 선택하여 계속 진행해 주세요.
라이선그 계약 내용을 읽고 라이선스 계약의 조항을 수락합니다를 선택하세요. 다음을 선택하여 계속 진행해 주세요.
라이선스 계약을 인쇄하려면 인쇄를 선택하세요.
다른 위치에 애플리케이션을 설치하려면 변경...을 선택하세요. 기본 위치는 C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\입니다.
다음을 선택하여 계속 진행해 주세요.
설치를 선택하여 설치를 마무리하세요.
마침을 선택하여 설치를 완료하세요.
설치하는 동안에 오류가 발생하거나, 단계가 불분명하거나, 매개변수 이름 또는 값이 불분명하면 문제 해결 절에서 자세한 내용을 확인하세요.
설치가 완료되면, ToolsTalk 2 구성 창이 열립니다.
서버 설정 탭에 매개변수를 입력하시고 저장을 선택하세요.
매개변수 | 설명 |
|---|---|
ToolsTalk 사용자 이름 | 애플리케이션에 로컬인 사용자의 사용자 이름입니다. |
서버 주소: | ToolsTalk 2 서버의 IP 또는 호스트 이름 |
웹 애플리케이션 포트 | ToolsTalk 2의 통신 포트 |
매개변수 | 설명 |
|---|---|
웹 API | 웹 API의 포트 |
신호R | 신호R 포트 |
컨트롤러 포트 | 포트 9016이 기본 컨트롤러 포트로 사용됩니다. 포트 9016을 사용하시는 경우 이 포트가 열려있고 연결할 수 있는지 확인하세요. 그렇지 않은 경우, 응용 프로그램이 작동하지 않습니다. 포트 80은 컨트롤러를 연결/연결 해제/추가하는 기능을 ToolsTalk 2에서 컨트롤러와 상호 작용하기 위해 사용할 때 사용됩니다. |
입력한 컨트롤러 포트가 열려있고 연결할 수 있는지 확인해 주세요!
ToolsTalk 2 애플리케이션은 시작 메뉴에서 사용할 수 있습니다.
스테이션 설정 연결
ToolsTalk 2 스테이션 설정이 있는 컴퓨터는 네트워크를 통하거나 직접 서비스 포트 컨트롤러에 연결될 수 있습니다.
네트워크 연결
컨트롤러의 ToolsTalk 2 서버 연결 주소는 이 컴퓨터로 지정되어야 합니다. 이는 컨트롤러 GUI 또는 컨트롤러 웹 GUI를 통해 이루어집니다.
한 번에 한 컨트롤러만 ToolsTalk 2 스테이션 설정이 있는 컴퓨터에 연결할 수 있습니다. 온라인 컨트롤러가 ToolsTalk 2 스테이션 설정 컴퓨터에 연결되어 있는 경우, 다른 컨트롤러에서의 그 다음 연결 시도는 무시됩니다.
컨트롤러 서비스 포트 연결
ToolsTalk 2가 함께 PC를 네트워크에 연결할 수 없는 경우 컨트롤러 서비스 포트를 사용하여 컨트롤러를 ToolsTalk 2에 연결할 수 있습니다. 예를 들어 Atlas Copco 또는 외부 서비스 기술자가 공장을 방문하고 외부 컴퓨터를 공장 네트워크에 연결하는 것은 허용되지 않습니다.
컴퓨터가 컨트롤러의 서비스 포트에 연결된 경우, 컨트롤러는 DHCP 서버 역할을 하고, 컴퓨터에 IP 주소를 제공합니다. 이 주소는 ToolsTalk 2 연결에 대한 컨트롤러 서버 연결 주소 필드에 입력해야 합니다.
파일 비교
구성자는 모든 구성 설정의 사본을 스토리지라고 불리는 .xml 파일로서 저장합니다. 이 파일은 제품 구성 .xml 파일에서 수동 변경을 식별할 때 도움이 됩니다. 제품 구성 .xml 파일이 수정된 경우 구성자를 시작하면 스토리지 파일 사용 또는 구성 파일 사용 옵션 중에서 선택할 수 있는 파일 비교 창이 열립니다.
SoftPLC 컨피규레이터 설치
컨트롤러에서 SoftPLC 기능을 사용하려면 ToolsTalk 2 클라이언트가 설치된 컴퓨터에 SoftPLC 컨피규레이터를 반드시 설치해야 합니다.
MultiProg551_Atlas_Installation을 포함하는 USB 또는 유사 장치를 삽입합니다.
MultiProg551_Atlas_Installation에서 Installation.bat를 두 번 클릭하면 설치가 시작됩니다.
설치가 완료되면 ToolsTalk 클라이언트를 엽니다(다시 시작 필요 없음).
In the ToolsTalk 2 client, Fieldbus 및 SoftPLC
 탭으로 이동합니다. SoftPLC 구성 섹션을 선택하고 일반 SoftPLC 설정에서, SoftPLC를 켜기로 설정합니다.
탭으로 이동합니다. SoftPLC 구성 섹션을 선택하고 일반 SoftPLC 설정에서, SoftPLC를 켜기로 설정합니다.
소프트웨어 제거
각 모듈(클라이언트, 서버, 스테이션 설정)은 다음과 같이 삭제할 수 있습니다.
Windows 제어판/프로그램 및 기능을 사용하여 원하는 프로그램과 모듈을 선택하고 제거합니다.
일부 모듈의 경우, 해당 변경 사항을 적용하려면 컴퓨터를 다시 시작해야 할 수 있습니다.
설치 유효성 검사
Windows 시스템 서비스 유효성 검사
후순위 프로그램과 서비스가 제대로 시작되었는지 확인하기 위한 점검 사항:
Windows 검색 버튼을 선택합니다.
검색 창 입력란에 services를 입력합니다.
아래로 스크롤하여 Atlas Copco Industrial Technique Host for ToolsTalk가 시작되었음을 확인합니다.
이는 ToolsTalk 2 서버 애플리케이션이 실행되고 있음을 나타냅니다.
아래로 스크롤하여 FlexNet License server - acopco가 시작되었는지 확인합니다.
이는 기능 관리 시스템에 대한 라이선스 서버 애플리케이션이 실행되고 있음을 나타냅니다.
클라이언트 서버 설치 유효성 검사
ToolsTalk 2 애플리케이션의 클라이언트-서버 버전을 성공적으로 설치한 후, 완전한 시스템 시험을 위해 컨트롤러가 필요합니다.
서버 컴퓨터가 네트워크에 연결되어 있어야 합니다.
클라이언트 컴퓨터가 네트워크에 연결되어 있어야 합니다.
컨트롤러는 네트워크에 연결되어야 하며 서버 컴퓨터와 통신하도록 구성되어야 합니다.
Atlas Copco Data Communication 서비스가 시작되었는지 확인하세요.
서버 및 클라이언트가 동일한 컴퓨터에 설치될 수 있습니다.
구성 및 컨트롤러 시작에 대한 사항은 컨트롤러 사용자 안내서를 참조해 주세요.
구성 시작 및 ToolsTalk 2 GUI 탐색을 위해 ToolsTalk 2 사용자 안내서를 참조해 주세요.
ToolsTalk 2 클라이언트가 설치되어 있는 경우, 애플리케이션을 시작할 수 있는 방법:
Windows 시작 메뉴를 선택하고 ToolsTalk 2 폴더를 검색합니다
ToolsTalk 2 아이콘
 을 클릭하여 애플리케이션을 실행합니다.
을 클릭하여 애플리케이션을 실행합니다.
스테이션 설정 설치 유효성 검사
ToolsTalk 2 스테이션 설치가 설치되어 있는 경우, 애플리케이션을 시작하는 방법:
Windows 시작 메뉴를 선택하고 ToolsTalk 2 폴더를 검색합니다
ToolsTalk 2 아이콘
을 클릭하여 애플리케이션을 실행합니다.
ToolsTalk 2 스테이션 설정 애플리케이션은 ToolsTalk 2 클라이언트 애플리케이션 또는 ToolsTalk 2 서버 애플리케이션이 설치되어 있다면 실행할 수 없습니다. 이는 쉽게 각각의 설치 프로그램을 실행하여 프로그램 유지 관리 창에서 제거 옵션을 선택하여 제거할 수 있습니다.
ToolsTalk 2 사용자 안내서의 시작하기 절은 창 및 창 탐색을 설명합니다.
ToolsTalk 2 스테이션 설정 애플리케이션의 GUI는 컨트롤러가 연결되어 있지 않은 경우에 약간 다릅니다. 라이브러리  아이콘 및 구성 설명서의 컨트롤러 라이브러리
아이콘 및 구성 설명서의 컨트롤러 라이브러리  아이콘 아래의 정보를 참조해 주세요.
아이콘 아래의 정보를 참조해 주세요.
라이선스 서비스의 유효성 검사
이 유효성 검사 프로세스는 클라이언트, 서버 및 ClickOnce 애플리케이션 설치에만 적용되며 스테이션 설정 설치에는 적용되지 않습니다.
ToolsTalk 2 설치가 완료되면, 시작 시 라이선스 서비스가 준비되었는지 확인해야 합니다.
웹 브라우저를 열고, 다음 두 페이지를 검색하시고 해당 단계를 완료하세요.
http://”ip-address:port"/api/1.0/health - 이 페이지에는 “connectionCheck”:"success"가 있어야 합니다. 그렇지 않은 경우, Flexera service를 다시 시작해야 합니다. 경우에 따라 두 번 이상 다시 시작이 필요할 수 있습니다.
http://”ip-address:port"/api/1.0/hostids - 이 페이지가 비어있는 경우, Flexera service를 다시 시작해야 합니다. 경우에 따라 두 번 이상 다시 시작이 필요할 수 있습니다.
이 유효성 검사 프로세스는 스테이션 설정 설치에는 적용되지 않습니다.
ToolsTalk 2 업그레이드
업그레이드를 시작하기 전에 ToolsTalk2 서버가 실행 중인지 확인하십시오.
ToolsTalk 2 2.12 이전 버전에서 업그레이드하고Atlas Copco Data Communication(ACDC)가 이미 설치되어 있는 경우 컨트롤러 포트가 ACDC가 설치된 포트와 동일한 포트를 가리키는지 확인하십시오. ACDC를 처음 설치하고 ToolsTalk 2 버전에서 현재 컨트롤러 포트 이외의 다른 포트를 사용하려면 다음 절차에 설명된 것처럼 컨트롤러 포트를 변경하십시오.
구성 파일에서, 컨트롤러 포트의 이름은 HubPort로 지정됩니다.
ToolsTalk.Server.SelfHostService.exe.config(ClickOnce/Client/Server) or ToolsTalk.Standalone.exe.config(Station Setup)에서, 컨트롤러 포트를 정확한 포트 번호<add key="HubPort" value="XXXX" />로 변경합니다.
문제 해결
설치 시 문제 해결
ToolsTalk 2를 업그레이드한 후 ToolsTalk Industrial Technique Host service를 다시 시작합니다.
오류 | 해결책 |
|---|---|
오류 코드 1920 시작하지 못했습니다. 올바른 권한이 있는지 확인합니다. | 데이터베이스 인증 오류. SQL 데이터베이스에서 혼합 모드 인증을 사용하도록 구성해야 합니다. 인증을 해결하기 위해 SQL Management Studio를 사용합니다. 다른 설치 시도를 하기 전에 컴퓨터를 다시 시작할 필요가 있습니다. |
설치 파일을 사용하는 경우, 설치가 이미 되었는지 InstallShield 마법사가 감지합니다. 이전의 설치가 컴퓨터에 존재하는 경우, 이는 감지되지 않을 수 있습니다.
따라서 새 설치를 시작하기 전에 프로그램 및 데이터베이스 카탈로그의 기존 인스턴스를 제거하는 것을 권장합니다.
구성
이 섹션에서는, 제품 설정을 생성, 수정 및 확인하는 방법에 대한 자세한 정보를 찾을 수 있습니다.
시작하기
시작 중
ToolsTalk 2 클라이언트가 설치되어 있는 경우, 다음과 같이 애플리케이션을 시작할 수 있음:
Windows 시작 메뉴를 클릭하고 모든 프로그램을 열고 ToolsTalk 2로 스크롤합니다.
폴더를 열고 ToolsTalk 2
를 클릭하여 애플리케이션을 실행합니다.
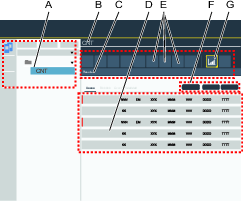
사용자 인터페이스 시작 뷰
ToolsTalk 2의 성공적인 시작 후, 위에서 설명한 아이콘을 포함하는 이 뷰가 표시됨:

A | 왼쪽 메뉴 모음 | C | 시스템 메뉴 모음 |
B | 공장 구조 작업 영역 | D | 컨트롤러 작업 영역 |
컨트롤러 작업 영역은 서로 다른 내용을 표시하며 선택한 아이콘이나 메뉴에 따라 해당 내용이 달라집니다.
시작시 기본 아이콘 선택은 공장 구조 아이콘  입니다. 이 아이콘은 해당 아이콘 색상을 하늘색으로 변경하여 표시됩니다. 작업 영역은 두 부분으로 나뉩니다.
입니다. 이 아이콘은 해당 아이콘 색상을 하늘색으로 변경하여 표시됩니다. 작업 영역은 두 부분으로 나뉩니다.
구조 작업 영역은 컨트롤러를 구성하고 개별 컨트롤러를 선택하기 위해 사용됩니다.
컨트롤러 작업 영역에는 모든 컨트롤러 아이콘을 표시되며 선택한 하나의 컨트롤러에 대한 모든 매개 변수 및 구성을 보고 설정하는 용도로 사용됩니다.
왼쪽 메뉴 모음 | 기능 |
|---|---|
공장 구조 | 공장 구조 아이콘 |
시스템 관리 | 시스템 관리 아이콘 |
라이브러리 | 라이브러리 아이콘 |
시스템 메뉴 모음 | 기능 |
|---|---|
변경 푸시 | 푸시 아이콘 |
사용자 설정 | 사용자 설정 아이콘 |
도움 | 도움말 |
 . 언어, 온도 단위, 토크 단위의 선택.
. 언어, 온도 단위, 토크 단위의 선택. 아이콘은
아이콘은 컨트롤러가 ToolsTalk 2에 연결되지 않거나 사용자 권한이 폴더 또는 컨트롤러에 대한 액세스를 허용하지 않는 경우 공장 구조 보기는 비어 있습니다.
컨트롤러
컨트롤러 유형
ToolsTalk 2를 사용하여 지원 및 구성할 수있는 컨트롤러 이외에도, 컨트롤러 목록에 다른 컨트롤러 유형과 해당 유형에 대한 일부 제한된 정보를 표시하는 기능이 있습니다. 구성할 수없는 컨트롤러는 ToolsTalk 2를 통해 관련 소프트웨어를 시작하여, 추가로 구성할 수 있습니다.
다른 컨트롤러 유형은 모든 컨트롤러 목록에 아이콘으로 표시됩니다.
컨트롤러 아이콘 | 컨트롤러 유형 | 호환이 가능한 소프트웨어 |
|---|---|---|
| Power Focus 6000 | ToolsTalk 2 |
| PF6 Flex 시스템 | ToolsTalk 2 |
| Power Focus 6000 StepSync | ToolsTalk 2 |
| Power Focus 4000 | ToolsTalkPF |
| Power Macs 4000 | ToolsTalkPM |
| 지원되지 않는 컨트롤러 - 상위 버전의 컨트롤러 및 현재 ToolsTalk 2 릴리스와 호환되지 않는 컨트롤러 | 해당 사항 없음 |
| IXB | ToolsTalk 2 |







컨트롤러 정보
다음은 Power Focus 4000 또는 Power Mac 4000 컨트롤러가 표시할 수 있는 정보의 예입니다. 지원되지 않는 컨트롤러는 이 정보를 표시하지 않습니다..
애플리케이션 부팅 소프트웨어 버전
컨트롤러 일련 번호
프로토콜 번호
RBU 일련 번호
RBU 유형
소프트웨어 버전
공구 정보
아래 정보는 Tools Talk2의 공구 아래에 표시됩니다. 여기에 표시되는 내용은 해당 컨트롤러 소프트웨어에서 구성됩니다.
식별자
일련 번호
모델 유형
서비스 날짜
교정일
조임 수
공구 유형
서비스 이후 조임
애플리케이션 코드 버전
부팅 코드 버전
공구 정보를 수신하려면, 컨트롤러를 ACDC에 연결해야 합니다. 자세한 내용은 ToolsTalk 2 문서를 참조해 주세요.
컨트롤러 추가
ToolsTalk 2에 연결된 컨트롤러는 공장 구조
에서 볼 수 있습니다.
컨트롤러가 ToolsTalk 2에 연결되지 않거나 사용자 권한이 폴더 또는 컨트롤러에 대한 액세스를 허용하지 않는 경우 공장 구조 보기는 비어 있습니다.
공장 구조를 선택한 다음 컨트롤러 목록 상단 영역의 아무곳이나 지정하시고 마우스 오른쪽 버튼을 클릭하세요 또한, 시스템 관리를 선택하신 다음, 컨트롤러 소프트웨어 및 데이터 관리 탭에서 왼쪽 메뉴 작업 영역에서 마우스 오른쪽 버튼을 클릭하세요. 새로운 컨트롤러 추가를 선택하세요. 컨트롤러 연결 대화 창이 열립니다.
IP 주소 또는 컨트롤러의 DNS 이름을 입력하세요. ToolsTalk 2 서버의 IP 주소가 미리 채워집니다.
컨트롤러 온라인 메시지가 표시되면 연결과 닫기를 차례대로 선택해 주세요.
연결 상태
컨트롤러 연결 창에 이미 연결된 컨트롤러의 IP 주소를 입력하시면 컨트롤러가 이미 연결되어 있고 온라인이라는 메시지가 표시됩니다.
연결 중에 컨트롤러가 온라인 상태가 되기를 기다리는 중이라는 메시지가 표시됩니다.
컨트롤러에 연결되면 컨트롤러 온라인 메시지가 표시됩니다.
연결에 실패하면, ToolsTalk가 컨트롤러와의 연결에 실패하였습니다. IP 주소/DNS 이름을 확인해주세요. 메시지가 표시됩니다.
또한 컨트롤러는 웹 GUI 또는 컨트롤러 GUI를 통해 ToolsTalk 2 애플리케이션에 연결할 수 있습니다.
이 절차는 컨트롤러 관련 설명서에 설명되어 있습니다.
컨트롤러 목록 관리
공장 구조 작업 영역은 모든 컨트롤러를 표시하는 기본 폴더가 포함됩니다. 모든 컨트롤러 보기는 온라인 또는 오프라인에 관계없이, 현재 ToolsTalk 2 서버에 연결된 모든 컨트롤러가 포함되어 있습니다. 사용자 정의 섹션은 폴더 안에 정렬된 모든 컨트롤러의 하위 섹션입니다.
사용자 정의 섹션 폴더 선택
컨트롤러 목록 맨 위의 옵션 버튼을 클릭하고 사용자 정의 섹션을 선택한 다음 적합한 폴더를 선택합니다.
사용자 정의 섹션을 선택한 다음 적합한 폴더를 선택합니다.
컨트롤러 선택
왼쪽 메뉴 모음에서 공장 구조를 선택합니다
.해당 컨트롤러에서 아래로 스크롤하여 이름 필드
 를 클릭하여 선택합니다.
를 클릭하여 선택합니다. 선택된 컨트롤러가 강조됩니다. 온라인 상태인 컨트롤러는 지속적으로 ToolsTalk 2 애플리케이션을 업데이트합니다.
오프라인 컨트롤러 이름은 줄이 그어져 삭제 표시가 되어 있습니다.
변경이 ToolsTalk 2 이외의 다른 컨트롤러 인터페이스를 통해 이루어진 경우, 오프라인 상태 컨트롤러는 이전의 오래된 정보를 표시할 수 있습니다.
여러 ToolsTalk 2 사용자가 동일한 컨트롤러에 액세스 하는 것이 가능합니다. 다른 ToolsTalk 2 사용자가 이미 선택된 컨트롤러를 선택하려는 시도가 있었다면, 다음과 같은 경고 메시지가 포함된 모달 대화 상자가 표시됩니다:
다른 사용자가 현재 시스템에서 활성 상태입니다. 매개변수 값은 예고없이 변경될 수 있습니다.
대화 상자를 닫고 계속하려면 확인을 선택합니다.
컨트롤러 검색
공장 구조 작업 영역에는 컨트롤러 목록에서 컨트롤러를 검색할 수 있는 필드가 있습니다.
검색 필드에 컨트롤러 이름을 두 글자 이상 입력합니다.
컨트롤러 이름이나 유형을 검색할 수도 있습니다.
원격 컨트롤러 다시 시작
특정 상황에서는 컨트롤러를 완전하게 전원 켜짐 시 초기화(POR)가 필요합니다.
다음은 ToolsTalk 2에서 원격 POR을 만드는 방법을 설명합니다.
왼쪽 메뉴 모음에서 공장 구조를 선택합니다
.선택한 컨트롤러를 마우스 오른쪽 단추로 클릭하고 바로 가기 메뉴에서 다시 시작을 선택함
모달 창 대화 상자에서 컨트롤러 다시 시작 작업을 확인하거나 취소합니다. 온라인으로 돌아오기 전에 컨트롤러는 우선 오프라인이 됩니다.
이 작업은 몇 분 걸릴 수 있습니다.
해당 작업이 진행되는 동안,ToolsTalk 2에서 다른 작업을 수행할 수 있습니다.
온라인 상태이고 ToolsTalk 2 애플리케이션 서버에 연결된 컨트롤러에서만 원격으로 다시 시작할 수 있습니다. 오프라인 컨트롤러 이름은 줄이 그어져 삭제 표시가 되어 있습니다.
매개 변수 및 구성의 변경 저장
컨트롤러의 상태가 온라인일 경우, 컨트롤러 GUI에서 변경된 사항이 있는 경우 ToolsTalk 2는 자동으로 업데이트됩니다.
ToolsTalk 2에서 변경한 내용은, 자동으로 저장되지만, 컨트롤러로 복사되지는 않습니다. 푸시는 컨트롤러에 변경 사항을 복사하고 활성 명령으로 실행됩니다.
푸시 표시기  는 공장 구조 작업 영역의 컨트롤러 이름 옆에 표시되어, ToolsTalk 2에서 구성이 변경되었지만 아직 컨트롤러로 복사되지 않은 상태를 나타냅니다.
는 공장 구조 작업 영역의 컨트롤러 이름 옆에 표시되어, ToolsTalk 2에서 구성이 변경되었지만 아직 컨트롤러로 복사되지 않은 상태를 나타냅니다.
푸시는 다양한 방법으로 실행할 수 있습니다.
컨트롤러 목록에서 컨트롤러 이름 옆에 있는 푸시 표시기 아이콘
을 선택하세요.ToolsTalk 2에서 하나 이상의 컨트롤러로 변경 사항 복사를 시작하려면 푸시.명령 버튼
 을 클릭하세요. 영향을 받는 컨트롤러를 선택하기 위한 바로 가기 메뉴가 열립니다.
을 클릭하세요. 영향을 받는 컨트롤러를 선택하기 위한 바로 가기 메뉴가 열립니다.공장 구조
작업 영역에서 컨트롤러 이름을 마우스 오른쪽 버튼으로 클릭하시고 바로가기 메뉴에서 푸시 명령 버튼을 선택하세요. 변경 사항은 ToolsTalk 2에서 선택된 하나의 컨트롤러로 복사됩니다.
상태가 오프 라인인 컨트롤러에는 푸시가 가능하지 않습니다.
작업 영역 창 관리
공장 구조의 작업 영역 및 보고서는 추가 작업에 대한 단일 컨트롤러의 선택을 포함합니다. 작업 공간을 최소화하거나 최대화하여 아래 그림에 설명된 대로 끌어놓거나 공장 구조 아이콘 을 선택하여 컨트롤러 작업 영역의 크기를 늘리십시오.

작업 영역 보기 최소화 또는 최대화
두 작업 영역 사이의 줄에 커서를 놓습니다. 커서 모양은 흰색 화살표에서 가로로 양쪽을 향한 화살표 모양으로 변경됩니다.
클릭하여 끌면 두 작업 영역 간의 경계선이 이동합니다. 작업 영역은 창 경계선을 왼쪽 메뉴로 완전히 이동하거나, 오른쪽 메뉴로 이동하여 최대화할 수 있습니다.
데이터 그리드 필터링 및 정렬
작업 영역 창의 데이터 그리드 열을 정렬하고 필터링할 수 있습니다.
정렬 및 필터링 기능에 액세스하려면 열 헤더를 선택하십시오.
목록을 정렬하려면, 목록 정렬을 선택하여 목록을 오름차순, 내림차순 또는 기본 순서로 정렬하십시오.
목록을 필터링하려면 확인란을 선택하여 표시할 항목을 필터링하십시오. 필터 지우기를 선택하여 기본 보기로 돌아갈 수 있습니다.
사용자 인터페이스 - 컨트롤러 개요가 있는 작업 영역
컨트롤러를 선택하고 컨트롤러 메뉴 아이콘을 선택하면 컨트롤러 작업 영역에 다음 정보가 표시됩니다.
A | 공장 구조 작업영역의 선택된 컨트롤러 |
B | 컨트롤러 작업 영역의 컨트롤러 이름 이름은 공장 구조에서 선택된 컨트롤러 이름과 동일합니다. |
C | 선택된 컨트롤러 메뉴 아이콘 |
D | 컨트롤러 작업 영어의 개요 정보가 있는 구성 목록 |
E | 컨트롤러 메뉴 아이콘 |
F | 컨트롤러 작업 영역의 명령 버튼의 행 명령 버튼 유형은 선택한 컨트롤러 메뉴 아이콘에 따라 다릅니다. |
G | 선택된 컨트롤러 메뉴 아이콘 노란색 테두리로 강조 표시됨 |
작업 영역 개요는 구성 목록을 표시하거나 매개 변수 값이 있는 메뉴를 보여줍니다. 구성 목록이 표시되면, 다음 단계인,구성 메뉴 이름을 두 번 클릭하여 메뉴 레벨에 엑세스할 수 있습니다.
하드웨어 구성탭 작업

하드웨어 레이아웃 구성의 오프라인 프로그래밍은 컨트롤러 템플릿 라이브러리에서 수행됩니다.
구성 영역
구성 영역에서, 레이아웃을 처음부터 만들거나 컨트롤러에서 추출한 기존 레이아웃을 업데이트 할 수 있습니다.
추출 | 컨트롤러에 연결된 하드웨어에 따라 하드웨어 레이아웃 구성을 업데이트합니다. |
확대 | 레이아웃을 확대합니다. (Ctrl + 마우스 휠 앞으로) |
축소 | 레이아웃을 축소합니다. (Ctrl + 마우스 휠 뒤로) |
화면에 맞춤 | 레이아웃을 다시 기본 크기로 되돌립니다. |
삭제 | 선택 항목을 삭제합니다. |
공구 상자
공구 상자에는 컨트롤러 버전에 유효한 모든 제품이 포함되어 있습니다.
하드웨어 레이아웃 만들기
PF6 시스템의 새로운 설치에는 하드웨어 레이아웃이 없습니다.
하드웨어 레이아웃을 만들려면, 공구 상자에서 캐리어(3슬롯 또는 6슬롯)로 시작하세요. 채널 번호 시퀀스의 경우, 먼저 6슬롯 캐리어 사용을 권장합니다. 3개 이상의 FlexCarrier가있는 시스템의 경우, 6 슬롯 FlexCarrier로 하드웨어 구성을 시작하세요.
FlexCarrier를 여기에 드레그 영역으로 드레그합니다. 표시기가 나타납니다. 마우스로 기호를 가리켜서 툴팁을 얻을 수 있습니다.
공구 상자에서 다른 제품을 Tool Box 목표 위치로 드레그하세요. 제품으로 목표 위치를 가리키면, 목표 위치의 색상이 변경됩니다.
빨강:잘못된 드롭
파랑:유효한 드롭
단일 제품 또는 모든 제품이 들어있는 캐리어를 이동, 복사 및 제거할 수 있습니다.
이동하려면 제품을 클릭하고 드레그하세요.
복사하려면, Ctrl을 누르고 제품을 드레그합니다.
삭제하려면, 제품을 선택하고 Delete를 누릅니다. FlexController가 포함된 FlexCarrier는, 하나의 남아있는 캐리어인 경우일 때에만 삭제할 수 있습니다.
하드웨어 레이아웃 구성 추출하기
하드웨어 레이아웃 구성이 비어있는 경우, 추출 버튼을 사용하여 현재 컨트롤러 설정을 추출할 수 있습니다.
추출을 선택하면, 하드웨어 구성 추출 대화 상자가 열립니다.
OK를 선택하여 현재 구성을 추출합니다.
현재 구성을 추출한 후 기기 상황 및 상태의 수신을 위해 변경 사항을 컨트롤러로 푸시하십시오. 하드웨어의 배포 상태는 유효성 검사후에 변경됩니다.
상태
컨트롤러가 연결되어 온라인 상태이고 하드웨어 레이아웃 구성이 컨트롤러와 동기화되면, ToolsTalk 2는 하드웨어 배포 상태의 변경 사항에 대한 알림 수신을 시작합니다. ToolsTalks 2는 알림을 수신하면, 컨트롤러에 하드웨어 측정 데이터를 요청합니다.
자세한 배포 상태 및 측정 데이터를 보시려면 다음을 실행합니다:
구성 영역에서 제품을 선택합니다. 여러 제품은, Ctrl 키를 누른 다음 선택할 수 있습니다.
창을 확장하려면 상태 표시줄을 클릭하십시오.
팁:
패널의 높이는 상단 테두리를 드래그하여 늘릴 수 있습니다.
최신 측정 데이터를 얻으려면 새로 고침을 클릭하십시오.
건강 상태에 대한 세부 정보를 확장할 수 있습니다. NOK 결과가 있는 데이터만 보려면NOK만 표시를 선택하십시오.
공구 구성
각 공구에 대해, 사용 가능한 모든 공구 구성이 포함된 목록에서 공구 구성을 선택할 수 있습니다. 기본 설정으로, 어떠한 공구 구성의 매핑도 실행되지 않습니다. 공구 구성에 매핑되지 않은 공구를 실행할 수도 있습니다. 이 경우, 컨트롤러는 어떠한 듀얼 트랜스듀서 기능을 사용 설정하지 않고 내부적으로 생성된 기본 공구 구성을 사용합니다.
금지 모드
채널 (컨트롤러 또는 공구)에 이상이 있는 경우, 하드웨어 사용을 계속하도록 금지 모드를 설정할 수 있습니다.
거짓: 채널이 정상적으로 작동 중입니다.
보고서 OK: 채널이 사용 중지되었으며 결과는 정상으로 보고됩니다.
보고서 NOK: 채널이 사용 중지되었으며 결과는 비정상으로 보고됩니다.
보고서 결과 없음: 채널이 사용 중지되었으며, 결과를 표시하지 않습니다.
캐리어
캐리어에는 다음과 같은 두 가지 유형이 있습니다:
3-슬롯
6-슬롯
구성에 최대 11개의 캐리어를 보유할 수 있습니다. 컨트롤러가있는 캐리어는 항상 첫 번째 캐리어입니다. 모든 이동 통신사는 첫 번째 캐리어 뒤에 드롭해야 합니다.
컨트롤러
컨트롤러는 첫 번째 캐리어의 첫 번째 슬롯에만 추가할 수 있습니다. 컨트롤러 제품을 시스템의 어떠한 다른 슬롯에도 추가할 수 없습니다.
드라이브
드라이브는 채널 번호가 65인 슬롯 또는 첫 번째 캐리어의 첫 번째 슬롯을 제외한 모든 사용 가능한 슬롯에 배치할 수 있습니다. 자세한 정보는 채널 번호 할당 섹션을 참조하십시오.
구성에 최대 64개의 드라이브를 가질 수 있습니다.
공백
공백은 모든 캐리어의 첫 번째 슬롯을 제외한 모든 사용 가능한 슬롯에 배치할 수 있습니다.
팬
팬 제품은 캐리어 상단에만 드롭할 수 있습니다. 3-캐리어에는 하나의 팬 모듈이 있고 6-캐리어에는 2개의 팬 모듈이 있습니다.
E-stop
E-Stop은 3가지 유형이 있습니다.
E-stop ASM
E-stop Entry
E-stop ByPass
처음 두 개의 E-Stops는 구성의 첫 번째 캐리어에만 드롭할 수 있습니다. 다른 모든 캐리어는 E-Stop ByPass만 가질 수 있습니다.
공구
Flex 시스템은 QST 공구만 추가할 수 있습니다. 공구가 연결되지 않은 드라이브에만 공구를 드롭할 수 있습니다.
기호
기호는 각 제품의 상태를 나타냅니다. 각 표시기를 가리켜 항상 툴팁을 얻을 수 있습니다.
| 경고 |
| 예상치 못함 |
| 양호 |
| 비어 있음 |
| 잘못된 유형 |
| 찾을 수 없음 |






채널 번호 할당
시스템 전원이 켜지면 각 FlexDrive에 채널 번호(드라이브 인덱스라고도 함)가 할당됩니다. 드라이브 인덱스는 FlexCarrier와 FlexCarrier에서 FlexDrive가 마운트되는 위치에 따라 다릅니다.
예: 채널 번호 할당
캐리어 1 | 슬롯 1 | 슬롯 2 | 슬롯 3 | 슬롯 4 | 슬롯 5 | 슬롯 6 |
컨트롤러 | 드라이브 | 드라이브 | 드라이브 | 드라이브 | 드라이브 | |
드라이브 인덱스 | - | 2 | 3 | 4 | 5 | 6 |
캐리어 2 | 슬롯 1 | 슬롯 2 | 슬롯 3 |
|
|
|
드라이브 | 드라이브 | 드라이브 | ||||
드라이브 인덱스 | 7 | 8 | 9 |
조임 프로그램 탭 작업
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.도구 모임에서, 조임 프로그램
 을 선택합니다.
을 선택합니다.조임 프로그램 개요는 조임 프로그램의 목록을 보여줍니다.
목록에 포함된 열:
열 | 설명 |
|---|---|
확인란 | 확인란을 표시하여 조임 프로그램을 선택합니다. |
이름 | 조임 프로그램의 이름입니다. 아직 컨트롤러로 푸시되지 않았지만 변경 내용들을 나타내기 위해 이름 옆에 푸시 표시기 |
전략 | 조임 프로그램에 대하여 선택한 조임 전략. |
라이브러리 링크 | 프로그램이 조임 프로그램 라이브러리의 글로벌 조임 프로그램에 연결되어 있는지 나타냅니다. |
목표 | 최종 조임 목표는 토크 값 또는 각도 값으로 표현됩니다. |
최종 변경 | 최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다. |
변경자: | 마지막으로 변경한 사용자를 나타냅니다. |
컨트롤러 업데이트됨 | 컨트롤러로 푸시된 마지막 변경으로서 컨트롤러 시간으로 표현됩니다. |
컨트롤러를 업데이트한 사용자 | 컨트롤러에 마지막으로 푸시한 사용자를 나타냅니다. |
승인 상태 | 조임 또는 풀기 프로그램의 승인 상태 |
ToolsTalk 2 GUI에서 수행되는 것처럼 변경자 필드는 ToolsTalk 2 등록 사용자일 수 있습니다.
컨트롤러 갱신자 필드는 웹 GUI 또는 컨트롤러 GUI를 통한 ToolsTalk 2 등록 사용자일 수 있습니다.
명령 | 설명 |
|---|---|
추가 | 새로운 조임 프로그램을 만듭니다. |
라이브러리에 추가 | 로컬 조임 프로그램을 글로벌 조임 프로그램으로 변환합니다. |
연결 해제 | 글로벌 조임 프로그램을 로컬 조임 프로그램으로 변환합니다. |
비교 | 선택한 두 조임 프로그램을 비교합니다. 같은 전략을 가지고 있어야 합니다. |
삭제 | 목록에서 선택한 조임 프로그램을 제거합니다. |
조임 프로그램 메뉴

목록의 각 행은 한 개의 다단계 조임 프로그램을 나타냅니다.
헤더 | 설명 |
|---|---|
확인란 | 특정 조임 프로그램을 선택할 때 사용됩니다. |
이름 | 사용자 정의 이름입니다. |
전략 | 조임 프로그램을 위해 선택한 전략. |
라이브러리 링크 | 글로벌 라이브러리에 링크됨 - 예/아니요. |
목표 |
|
마지막 변경 | ToolsTalk 2 시간으로 표현된 시간입니다. |
변경자: | <user>에 의해 변경된 조임 프로그램 |
컨트롤러 업데이트됨 | 컨트롤러 갱신은 컨트롤러 시간으로 표현됨. |
컨트롤러를 업데이트한 사용자 | 컨트롤러 업데이트 수행자: <사용자> |
승인 상태 | 조임 또는 풀기 프로그램의 승인 상태 |
명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
다단계 조임 소개
다단계 조임은 일부 단계에서 수행되는 조임입니다. 단계의 수와 유형은 수행해야 할 조임에 따라 달라집니다.
종종 다단계 조임은 병렬로 많은 공구를 사용하여 실행됩니다. 예를 들어, 차에 휠을 고정하고있는 5개의 볼트를 조이는 작업이 다단계 조임에 해당됩니다. 조임이 제대로 실행되었는지 확인하려면 모든 공구가 동기화되어, 거의 같은 시간에 동일한 토크에 도달해야 합니다.
이 동기화가 실행되는지 확인하기 위해, 다단계 프로그램은 동기화 지점을 사용합니다. 동기화 지점에서, 각 공구가 멈춥니다. 모든 공구가 동기화 지점에 도달하면, 공구는 다음 동기화 지점에 도달할 때까지 다음 단계를 계속 수행합니다.
동기화 지점들 사이의 단계 수는 1에서 10까지 유연하게 달라질 수 있습니다. 다른 공구에서 실행되는 다단계 프로그램이 동기화 지점들 사이에 동일한 단계 수를 가질 필요는 없습니다. 다단계 조임 프로그램은 매우 쉽게 구성할 수 있으며 다른 다단계 프로그램의 실제 레이아웃은 크게 다를 수 있습니다.
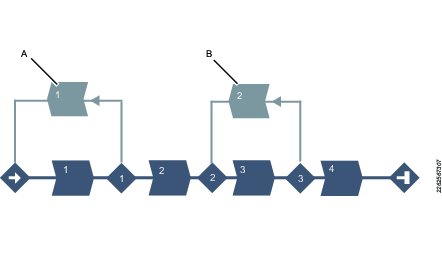
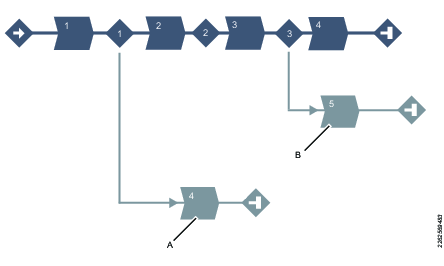
예: 다단계 조임 프로그램

위치 |
|
A | 1단계와 2단계에서는 공구를 볼트에 체결합니다. |
B | 3단계에서 빠른 런다운을 실행합니다. |
C | 4단계와 5단계는 실제 조임을 실행합니다. |
D | 6단계는 볼트에서 소켓을 분리하기 위해 사용됩니다. |
제한 사항 제한 사항은 예상하지 못한 일이 발생했을 경우 조임을 중단하는 데 사용됩니다. 몇 가지 예를 들자면, 이러한 제한 사항으로 최대 설정 토크에 도달하지 않았거나 다단계 조임 중 일부 길이가 수행하기 부적합하다는 점을 검사할 수 있습니다. 모든 단계는 제한을 각각 최대 4개 가질 수 있습니다.
모니터 모니터는 조임이 사양에 맞게 수행되었는지 확인하는 데 사용됩니다. 예를 들어, 각도 한계와 토크 한계가 포함될 수 있습니다. 모든 단계는 최대 4개의 모니터를 가질 수 있습니다.
동기화 모드
동기화 모드에서는 다른 공구에서 여러 가지 조임 프로그램을 동시에 실행할 수 있다. 동기화 모드의 주요 기능은 동기화된 조임에 포함되어야 하는 공구를 정의하고 각 공구가 실행해야하는 조임 프로그램을 지정하는 것입니다.
거부 관리
조임 프로그램에서 문제가 발생하는 경우, 해당 프로그램은 복구를 수행하거나 종료될 수 있습니다.
거부 관리는 모든 공구가 동기화 지점에 도달하면 각 공구의 상태와 전체 상태가 평가될 때 작동합니다. 동기화 지점의 모든 채널이 OK이면 프로그램은 다음 단계로 계속 진행합니다. 만약 어떤 것이 NOK이면 프로그램은 설정된 조치에 따라 복구되거나 종료됩니다.
다단계 프로그램 추가
추가 버튼을 클릭합니다. 새 조임 프로그램 만들기 대화 창이 열립니다.
프로그램 이름, 인덱스 번호(조임에만 유효),를 입력하고 다단계 조임 전략을 선택합니다. 인덱스에서 선택하지 않은 경우 프로그램 목록에서 다음 순차적 번호가 조임 프로그램에 부여됩니다.
추가 버튼을 클릭합니다.
조임 프로그램 복사하기 및 붙여넣기
기존 조임 프로그램은 탬플릿으로서 복사할 수 있으며 다른 컨트롤러에 붙여넣기 할 수 있습니다.
복사하기 및 붙여넣기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
공장 구조
영역에서, 컨트롤러를 선택합니다.조임 프로그램
으로 이동합니다.작업 영역에는 사용 가능한 컨트롤러 설정이 표시됩니다.
복사 할 하나의 행을 마우스 오른쪽 버튼으로 클릭하거나, 여러개의 행을 복사하기위해 복사하려는 각 프로그램에서 확인란
 을 선택한 다음 마우스 오른쪽 버튼을 클릭합니다.
을 선택한 다음 마우스 오른쪽 버튼을 클릭합니다.복사를 선택합니다.
빈 작업영역을 마우스 오른쪽 버튼으로 클릭한 다음 붙여넣기를 선택하여 목록의 첫 번째 사용 가능한 위치에 조임 프로그램을 추가합니다. 또는 마우스 오른쪽 버튼을 클릭하고 색인으로 붙여넣기를 선택하여 프로그램 목록의 위치를 선택합니다. 조임 프로그램을 더블 클릭하여 열고 수정합니다.
프로그램 탬플릿 라이브러리 작업 공간에 조임 프로그램을 붙여넣기 할 수도 있습니다.
다단계 프로그램 가져오기
추가 버튼을 클릭합니다. 새 조임 프로그램 만들기 대화 창이 열립니다.
가져오기 탭을 선택합니다.
파일 열기를 선택하고 원하는 위치에서 파일을 선택하십시오. 해당 파일은 <template_name>.json 형식이어야 합니다. 열기를 선택합니다.
다단계 프로그램 삭제
삭제할 각 다단계 프로그램에 대해, 작업 영역에서 맨 왼쪽에 있는 열의 확인 란에 표시합니다.
관리 명령어 버튼을 선택한 다음, 드롭다운 목록에서 삭제를 선택합니다.
선택한 다단계 프로그램이 제거되고 목록이 업데이트됩니다.
다단계 조임 프로그램 비교
조임 프로그램에서, 2개의 다른 다단계 조임 프로그램을 비교할 수 있습니다.
조임 프로그램 탭
으로 이동하여, 프로그램 목록에서, 비교할 조임 프로그램의 해당 확인란을 선택합니다.다단계 프로그램은 조임은 조임, 풀기는 풀기와 같이, 동일한 작업 모드끼리만 비교할 수 있습니다.
관리 명령 버튼을 선택한 다음, 비교를 선택합니다.
작업 공간에는 실제 다단계 프로그램 단계의 그래픽 이미지가 표시되며, 비교 영역에는, 선택된 두 개의 조임 프로그램에 대한 매개변수가 표시됩니다.
비교 창에서는 다른 특정 매개변수 값이 빨간색으로 표시됩니다. 다른 매개변수 값만 표시하려면 차이가 있는 값만 표시 확인란을 선택하십시오. 다른 매개변수를 포함하는 속성 및 단계 섹션에는 파란색 표시기로 마킹됩니다.
비교 중인 두 개의 다단계 프로그램은 편집할 수 없으며 구성 오류 또는 경고는 표시되지 않습니다.
글로벌 조임 프로그램 .
조임 프로그램은 로컬 또는 글로벌이 될 수 있습니다. 조임 프로그램이 글로벌인 경우는 조임 프로그램의 목록에 있는 라이브러리 링크 열에서 예로 표시됩니다.
로컬 조임 프로그램은 하나의 컨트롤러에 대하여 유효합니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.도구 모임에서, 조임 프로그램
을 선택합니다.조임 프로그램 개요는 조임 프로그램의 목록을 보여줍니다.
로컬 조임 프로그램은 조임 프로그램 탭을 통해 편집할 수 있습니다.
로컬 조임 프로그램은 조임 프로그램 라이브러리  에 표시되지 않습니다.
에 표시되지 않습니다.
글로벌 조임 프로그램은 조임 프로그램을 사용하는 여러 컨트롤러에 유효합니다. 글로벌 조임 프로그램은 조임 프로그램 라이브러리에 있습니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 상단 메뉴 모음에서 조임 프로그램 라이브러리
를 선택합니다. 조임 프로그램 라이브러리는 글로벌 조임 프로그램의 목록을 보여줍니다.
컨트롤러가 글로벌 조임 프로그램을 사용하면 조임 프로그램 에서 보이지만 편집은 금지되어 있습니다.
글로벌 조임 프로그램은 조임 프로그램 라이브러리만을 통해 편집할 수 있습니다.
조임 편집기
버튼
이름 | 설명 |
|---|---|
디스플레이 |
|
확대 | 조임 프로그램을 확대합니다. |
축소 | 조임 프로그램에서 축소합니다. |
화면에 맞춤 | 조임 프로그램 전체를 끌어놓기 영역에 맞춥니다. |
삭제 | 선택 항목을 삭제합니다. |
복구 영역
복구 영역의 단계는 동기화 지점의 상태가 NOK인 경우, 복구 경로를 보여줍니다.
복구 경로는 항상 동기화 지점에서 시작하고 종료됩니다. 복구 경로를 다시 입력해야하는 위치는 유연하게 변경될 수 있지만, 복구 경로는 항상 프로그램 시작 위치로 돌아 가야합니다.
각 동기화 지점에서 하나의 복구 경로만 시작할 수 있지만 여러 복구 경로는 동일한 동기화 지점에서 종료될 수 있습니다.
복구 경로에서 실행할 단계 수는 1~3 단계가 될 수 있습니다.
프로그램 시작부터 복구 경로를 정의하는 것은 불가능합니다.
예: 복구 경로
A | 첫 번째 동기화 지점에서 프로그램 시작 시까지의 복구 경로. |
B | 세 번째 동기화 지점에서 두 번째 동기화 지점까지 복구 경로. |
조임 영역
조임 영역에는 조임 경로, 예를 들어 수리 및 종료 경로를 제외한 다단계 조임 프로그램의 단계 및 동기화 지점이 포함됩니다.
종료 영역
종료 영역의 단계들은 동기화 지점의 상태가 치명적일 경우 종료 경로를 보여줍니다. 종료 경로가 실행되면 조임이 종료됩니다. 종료 경로는 항상 동기화 지점에서 시작됩니다. 각 동기화 지점에서 하나의 종료 경로만 시작될 수 있습니다.
종료 경로에서 실행할 수 있는 단계 수는 1~ 3단계입니다.
항상 모든 동기화 지점에서 종료할 수 있습니다. 종료 경로가 정의되지 않은 경우 프로그램은 다른 단계를 실행하지 않고 직접 끝으로 이동합니다.
예: 종료 경로
A | 첫 번째 동기화 지점에서 프로그램 끝까지의 종료 경로입니다. |
B | 세 번째 동기화 지점에서 프로그램 끝까지의 종료 경로입니다. |
구성
단계, 제한, 또는 모니터를 선택하고 화면 하단의 구성을 클릭하여 구성 필드를 엽니다. 여러 단계를 선택하려면 Ctrl키를 사용하십시오.
구성 필드는 복구 영역에서 선택되는 단계, 모니터 또는 제한 사항에 따라 단계, 모니터 및 제한 사항에 대한 여러 매개 변수를 포함합니다.
필수 매개 변수를 입력하십시오.
모니터 또는 제한을 삭제하려면 해당 필드에 있는 삭제를 선택하면 됩니다.
변속 사용
단계 동안 1-5 각도 또는 토크 트리거를 정의할 수 있고, 여기에서 변속합니다.
속도 변경은 구성 필드에 추가할 수 있습니다.
한 단계 내에서 모든 변속 트리거는 동일한 속성을 기준으로 하며, 이는 토크 또는 각도입니다. 그들은 한 단계 내에서 함께 사용할 수 없습니다.
변속 추가:
변속이 가능한 단계의 대화 상자에서 변속 추가를 클릭하고 각도 범위 또는 토크 범위를 선택합니다. 변속 각도/토크 필드가 열립니다.
아래 표에 따라 값을 추가하세요.
매개변수 | 설명 |
|---|---|
각도/토크 트리거 | 필수 조건: > 0. |
속도 | 필수 조건: > 0. |
속도 램프 유형 | 하드 또는 소프트. |
토크 트리거 및 각도 트리거는 단계 및 트리거 타입의 유형에 따라, 단계 목표보다 작아야 합니다.
토크 트리거 및 토크 속도도 공구의 최대 토크와 최대 속도에 대해 검증됩니다. 변속 설정이 공구 최대 값 또는 단계 최대 값 중 하나를 초과할 때마다 경고 또는 오류 표시가 발생합니다.
조임 프로그램에 경고가 있을 때 컨트롤러에 설정을 푸시할 수 있지만, 조임 프로그램에 오류(결함) 표시가 있을 때에는 가능하지 않습니다.
공구 상자
공구 상자는 다음을 포함합니다.
드레그 엔 드롭 바로가기 키
바로가기 키 | 설명 |
|---|---|
스페이스 바 + 커서 | 드레그 엔 드롭 영역을 이동합니다. |
끌어놓기 영역 기능
기능 | 설명 | |
|---|---|---|
|
|
|
단계 추가 |  | 공구 상자에서 단계를 잡습니다. 원하는 위치로 단계를 끌어놓습니다. 가능한 위치는 밝은 파란색 표시 화살표로 표시됩니다. |
___________ | __________________________ | _________________ |
단계 표시 |  | 표시할 단계를 클릭합니다. |
___________ | __________________________ | _________________ |
단계 이동 |  | 단계를 이동하려면 단계를 클릭하고 이동하는 동안 단추를 길게 누르고 있습니다. |
___________ | __________________________ | _________________ |
단계 복사 |  | 단계를 복사하려면 Ctrl 버튼을 클릭하고 단계를 드레그 엔 드롭하십시오. |
___________ | __________________________ | _________________ |
수리 경로 추가 |  | 수리 부분을 시작하는 지점에서, 동기화 지점 위에 단계를 배치하십시오. |
___________ | __________________________ | _________________ |
수리 단계 추가 |  또는  | 수리 영역에 단계를 추가하여 수리 단계를 추가하십시오. 가능한 위치는 밝은 파란색 표시 화살표로 표시됩니다. 또는 수리할 부분이 시작되는 곳에서, 동기화 지점 위에 단계를 배치하십시오. 그러면, 해당 단계는 수리 경로의 첫 번째 단계 앞에 배치됩니다. |
___________ | __________________________ | _________________ |
종료 경로 추가 |  | 종료 부분이 시작되어야하는 위치로 부터 동기화 지점 아래에 해당 단계를 배치하십시오. |
___________ | __________________________ | _________________ |
종료 단계 추가 |  또는  | 종료 영역에 단계를 배치하여 종료 단계를 추가하십시오. 가능한 위치는 밝은 파란색 표시 화살표로 표시됩니다. 또는 종료 부분이 시작되는 지점에서 동기화 지점 아래에 해당 단계를 배치하십시오. 해당 단계는 종료 경로의 첫 번째 단계 앞에 배치됩니다. |
___________ | __________________________ | _________________ |
수리 경로에 대한 종료 지점을 이동하십시오. | 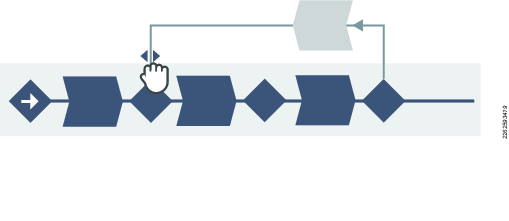 | 수리 경로의 종료 지점을 이동하려면 작은 화살표를 클릭하십시오. |
___________ | __________________________ | _________________ |
제한 및 모니터 추가 | 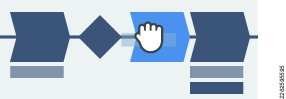 | 공구 상자에서 제한 또는 모니터를 잡습니다. 제한 또는 모니터를 원하는 단계에 드레그합니다. 제한 또는 모니터 추가가 가능한 단계는 밝은 청색으로 변하여 표시됩니다. |
___________ | __________________________ | _________________ |
금지된 배치 | 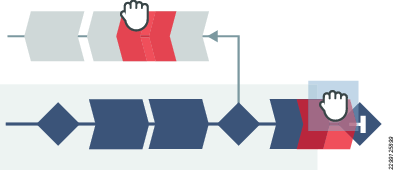 | 빨간색 화살표는 단계를 배치할 수 없음을 나타냅니다. |
|
|
조임 단계
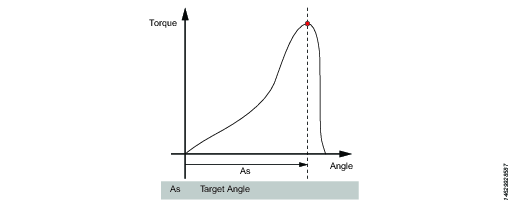
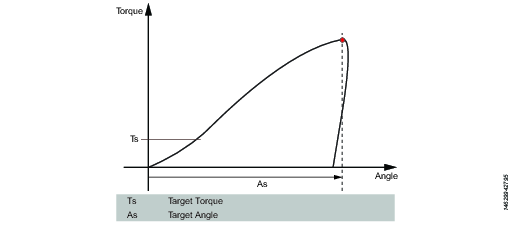
각도(A)만큼 조임/풀기
A - 각도만큼 조임
목표 각도에 도달할 때까지 이 단계는 공구를 작동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
A –각도까지 풀기
이 단계에서는 각도의 목표에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
매개변수
매개변수 | 설명 |
|---|---|
목표 각도 | 각도 목표입니다. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
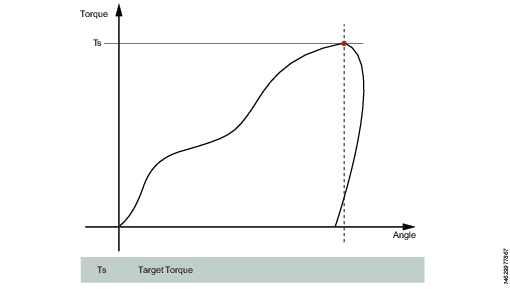
T - 토크까지 조임/풀기
T - 토크까지 조임
목표 토크에 도달할 때까지 이 단계는 정방향의 프로그래밍된 속도로 공구를 작동합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
T - 토크까지 풀기
이 단계는 공구를 역방향으로 해당 속도로 실행합니다. 토크까지 풀기 단계가 활성화되려면, 토크는 목표 토크의 110 %를 초과해야 합니다. 목표 토크는 양의 값으로 설정해야합니다. 목표 토크에 도달한 후, 목표 토크 이하로 토크가 떨어질 때까지 단계가 실행됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
첫째 토크 시 중지 | 단계는 토크가 목표 토크를 지날 때까지 실행됩니다. 목표 토크는 양의 값으로 설정해야합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
T + A - 토크 플러스 각도까지 조임
목표 토크에 도달할 때까지 이 단계가 공구를 작동합니다. 이 지점에서 이것은 추가로 목표 각도를 계속 실행합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
목표 각도 | 각도 목표입니다. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
DI – 디지털 입력까지 실행
이 단계는 정지 조건 값에 따라 디지털 입력으로 지정된 입력 값이 높거나 낮을 때까지 매개변수 방향으로 정의된 방향으로 공구를 실행합니다.
매개변수 | 설명 |
|---|---|
방향 | 정방향 또는 역방향 |
디지털 입력 | 컨트롤러에서 다음 로컬 디지털 입력 중 하나를 선택할 수 있습니다.
|
정지 조건 |
|
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 (rpm) | 기본값: 60 rpm. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동인 경우에 사용할 수 있습니다. 기본값: 500 rpm/s. |
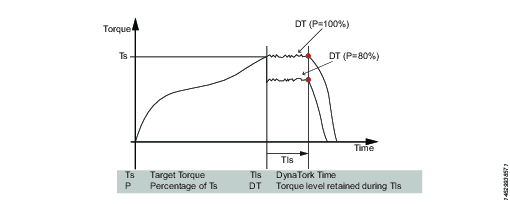
DynaTork(DT)까지 조임
이 단계에서는 목표 토크에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 공구는 DynaTork 시간 동안 목표 토크의 DynaTork 비율로 전류를 일정하게 유지합니다.
공구의 과열을 방지하기 위해 최대 토크의 40%를 넘게 DynaTork를 작동하지 않을 것을 매우 권장합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 토크 목표 필수 조건: > 0. |
DynaTork 시간 | DynaTork가 활성화될 시간입니다. |
DynaTork 백분율 | 토크 목표의 백분율입니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 (rpm) | 기본값: 60 rpm. |
대기 (W)
이 단계에서 공구는 지정된 시간 동안 대기합니다. 공구는 대기하는 동안 회전하지 않습니다.
대기 단계 이전의 단계에서는 브레이크를 반드시 켜짐으로 설정해야 합니다. 즉, 대기 단계는 반드시 공구를 정지 상태로 시작해야 합니다.
매개변수 | 설명 |
|---|---|
대기 시간 | 도구가 정지 상태로 있는 시간(초)입니다. |
위치 고정 | 켜짐 또는 꺼짐으로 변환됩니다. 켜짐으로 설정되면 공구는 목표 시간 도중 공구가 위치를 유지합니다. |
소켓 해지 (SR)
이 단계에서는 목표 각도에 도달할 때까지 역방향으로 속도 n으로 공구를 구동합니다. 목표 각도 단계의 시작으로부터 측정됩니다.
다단계 조임 프로그램의 조임 경로에서 마지막 단계로만 그 단계를 사용하는 것이 허용됩니다. 그러나, 이 단계 후에 동기화 지점을 추가할 수 있습니다.
매개변수 | 설명 |
|---|---|
목표 각도 | 각도 목표입니다. 기본값: 3º , 반드시 > 0 |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
속도 | 기본값: 60 rpm. |
T|A – 토크 또는 각도까지 조임
이 단계는 토크 목표 또는 각도 목표 중 첫 번째 목표에 도달 할 때까지 앞방향으로 선택한 속도로 공구를 실행합니다. 토크 및 각도 측정은 단계의 시작 부분에서 시작됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 필수 조건: > 0. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
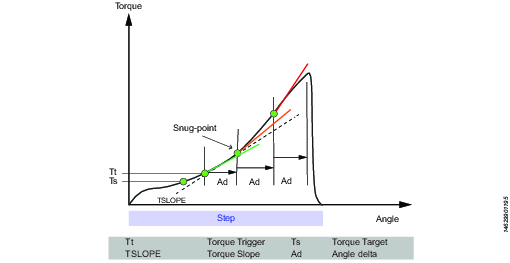
런다운 (RD)
이 단계에서는 정방향의 해당 속도로 공구를 실행하고 런다운 유형에 따라 달라지는, 토크 또는 스너그 단계 동작은 다음과 같습니다.
런다운 유형: 토크까지: 지정된 목표 토크가 발견되면 단계가 중지됩니다.
런다운 유형: 스너그까지: 스너그 경사도 계산은 지정된 토크 트리거 레벨 Tt에서 시작됩니다. 어떠한 토크 트리거도 설정되지 않은 경우 단계 시작시 경사도 계산이 시작됩니다.
경사도 계산은 Ad 각도로 두 각도 지점 사이에서 이루어지며 다음과 같이 계산됩니다. (Tn – Tn-1) / (An – An-1) 그리고 두 개별 항목 뒤의 두 기울기가 TSLOPE 보다 크면 바로 스너그 지점이 발견됩니다.
매개변수 | 설명 |
|---|---|
런다운 유형 | 토크까지 또는 스너그까지. |
목표 토크 | 기본값: “설정되지 않음". 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
트리거 토크 | 런다운 유형이 스너그 까지인 경우 트리거 토크 필드가 표시됩니다. 기본값: “설정되지 않음". 필수 조건: > 0. |
증분 각도 | 런다운 유형이 스너그 까지인 경우 델타 각도 필드가 표시됩니다. 기본값: "0" 필수 조건: > 0. |
토크 속도 | 런다운 유형이 스너그 까지인 경우 델타 각도 필드가 표시됩니다. 기본값: "0" 필수 조건: > 0. |
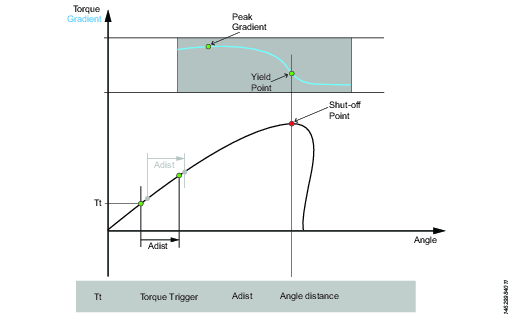
Y - 항복점 까지 조임
항복점이 감지될 때까지 이 전략은 정방향의 속도로 공구를 작동합니다. 토크가 바로 트리거 토크 수준을 초과하는 지점부터 토크 경사도릍 모니터링함으로써 항복점이 발견되며, 토크 및 각도 거리 측정치가 계산 근거입니다. 각도 거리 매개변수는 조인트의 지정된 경도에 따라 설정됩니다.
경사각 창을 설정합니다 (하드 조인트, 소프트 조인트 또는 각도 창을 위한 수동 설정). 수동을 선택하면 각도 창을 설정해야 합니다. 조인트는 나사가 완전한 토크로 조여지고 착좌점까지 30도 이하로 회전하면 하드로 간주합니다. 소프트 조인트는 착좌점까지 조인 후에 720° 이상 회전합니다. 경도 매개변수는 경사도 계산을 위한 각도 창을 정의합니다. 조인트 경도가 높을수록 각도 창이 작습니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100를 충족해야 합니다. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
항복 지점 비율 | 필수 조건: >= 20 % |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|
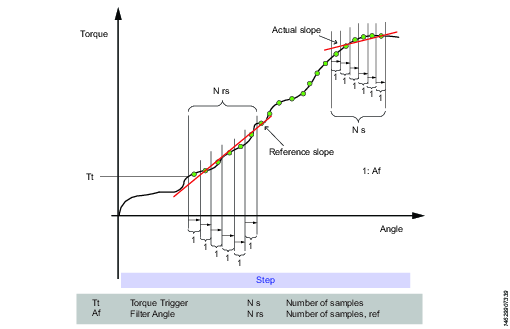
항복점까지 조임, 방법 2 (YM2)
항복점이 감지될 때까지 이 단계는 정방향의 지정된 속도로 공구를 작동합니다.
토크가 Tt에 도달하면 항복점 검색이 시작됩니다. Af도에 대한 토크 평균이 계산됩니다. 이 절차는 N rs번 반복됩니다.
참조 기울기는 N rs점에 대한 선형 회귀 분석을 통해 계산됩니다. 그 후에, A f 도에 대한 새로운 평균값이 연속적으로 계산됩니다.
실제 기울기는 마지막 N s 평균점에 대한 선형 회귀 분석을 통해 계산됩니다. 기울기가 참조 기울기의 Py % 보다 작으면 항복점에 도달됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
필터 각도 | 기본값: 1. 필수 조건: > 0. |
샘플 수 | 기본값: 6. 필수 조건: >= 4. |
샘플 수, 참조 | 기본값: 6. 필수 조건: >= 4. |
항복 지점 비율 | 기본값: 90% 필수 조건: >20%. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
속도 램프 | 속도 램프 유형이 수동이면, 이 필드가 열립니다. 기본값: 500 rpm/s. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
TC - 토크 교정
토크 목표에 도달할 때까지 이 단계는 정방향의 지정된 속도로 공구를 작동합니다.
이 항목을 주 또는 보조로 설정하면 두 개의 변환기 중 하나를 교정할 수 있습니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
트랜스듀서 | 주 또는 보조. 기본값: 주 |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
체결 (E)
소켓에 나사가 체결될 때까지 이 단계는 두 방향으로 공구를 작동합니다. 체결되지 않으면 계속 진행이 예로 지정되어 있는 한 이 단계는 목표 토크나 목표 각도에 도달할 때까지 계속 실행됩니다. 대상 각도가 어느 방향으로든 도달하면 방향이 반전됩니다. 최대 체결 시도에 들어가서 검색 반복을 제한합니다. 목표 토크가 어떤 방향으로든 도달하면 단계는 OK 상태로 종료됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 기본값: 0. 필수 조건: > 0. |
최대 체결 시도 | 기본값: 2. 필수 조건: > 0. |
체결되지 않은 경우 계속하기 | 예인 경우 체결 시도가 실패하더라도 단계는 OK 상태로 종료됩니다. 아니오 인 경우 체결 시도가 실패하면 NOK 상태로 종료됩니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
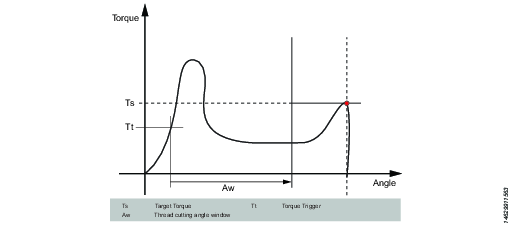
토크까지 스레드 컷팅 (ThCT)
토크까지 스레드 컷팅 기능은 필요한 런다운 토크가 런다운 완료 토크보다 큰 조임을 가능하게 합니다. 예를 들어, 자체 스레드(또는 자체 태핑) 나사를 사용하여 금속의 얇은 층을 조일 때 사용됩니다. 스레드 컷팅 각도(Aw)에 도달할 때까지 이 공구는 정방향으로 작동합니다. 토크가 스레드 커트 트리거 토크(Ttc)를 처음 통과할 때 스레드 컷팅 각도 창이 측정됩니다. 스레드 컷팅 각도에 도달한 시점에서, 단계는 목표 토크(Tt)에 도달할 때까지 계속 실행됩니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
스레드 컷팅 각도 창 | 기본값: 0. 필수 조건: > 0. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
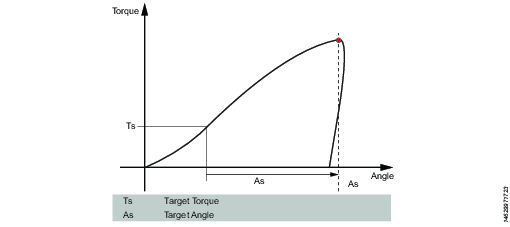
토크 및 각도까지 조임 (T&A)
공구는 목표 토크와 목표 각도에 도달할 때까지 정방향으로 지정된 속도로 실행될 때까지 작동합니다. 목표 토크와 목표 각도는 > 0으로 설정되어야 합니다.
매개변수 | 설명 |
|---|---|
목표 토크 | 필수 조건: > 0. |
목표 각도 | 기본값: 0. 필수 조건: > 0. |
브레이크 | 켜짐 목표에 도달하면 공구가 중지됩니다. 꺼짐 프로그램은 공구를 멈추지 않고 다음 단계로 바로 이동합니다. |
속도 | 기본값: 60 rpm. 필수 조건: > 0. |
속도 램프 유형 | 하드, 소프트 또는 수동. 기본값: 하드 수동을 선택하면, 속도 램프 필드가 열립니다. |
동기화 포인트
동기화 지점에서 공구는 다른 모든 공구가 해당 프로그램의 해당 동기화 지점에 도달할 때까지 대기합니다. 모든 공구의 상태에 따라, 프로그램은 조임 경로, 복구 경로 또는 종료 경로에서 계속됩니다.
동기화 지점에서 대기중인 공구의 과열을 방지하기 위해 최대 토크를 “고정 토크” 또는 “위치 고정”를 최대 1초 동안만 허용합니다. 그런 다음 공구가 고정을 해제하고 다른 공구를 기다립니다.
매개변수 | 설명 |
|---|---|
동기화 유지 조건 |
|
다단계 조임 프로그램에서 동기화 지점을 더블 클릭하거나 표시한 다음 작업 공간의 아래쪽 영역에서 구성을 선택합니다. 여러 개의 동기화 지점을 표시하려면, CTRL 키를 누르십시오.
구성 영역에서, 각 동기화 지점에 대해 다음 조건 중 하나를 선택합니다.
유지 없음. 모터가 꺼지고 위치가 유지되지 않습니다.
위치 유지. 공구는 이전 단계가 끝났을 때 가졌던 위치를 유지합니다.
유틸리티
복구 경로 또는 종료 경로를 다시 사용하기 위해 커넥터를 추가할 수 있습니다.
커넥터를 선택합니다.
동기화 지점을 선택합니다.
잘못된 동기화 지점이 선택한 경우, 마우스 오른쪽 버튼을 사용하거나 Esc 버튼을 눌러 취소하십시오.
복구 경로 또는 종료 경로에 있는 단계를 선택하십시오.
복구 경로는 뒤쪽 종료 경로는 앞쪽만 선택할 수 있습니다.
커넥터가 추가됩니다.
하나의 동기화 지점에는 하나의 복구 경로와 하나의 종료 경로만 존재할 수 있습니다.
예: 동일한 복구 경로

A | 두 번째 동기화 지점에서 5단계와 동일한 복구 경로입니다. |
B | 세 번째 동기화 지점에서 5단계와 동일한 복구 경로입니다. |
예: 동일한 종료 경로

A | 첫 번째 동기화 지점에서 5단계와 동일한 종료 경로입니다. |
B | 두 번째 동기화 지점에서 5단계와 동일한 종료 경로입니다. |
단계 모니터
단계 모니터링은 조임이 사양에 맞게 수행되었는지 확인하는 데 사용되며, 예를 들어 각도 한계 또는 토크가 여기에 포함됩니다. 모니터는 유연하며 다단계 프로그램에서 필요에 따라 배치할 수 있습니다.
다단계 조임 프로그램의 각 단계마다 최대 4개의 모니터를 갖을 수 있습니다
A - 각도
이 단계 모니터는 모니터링을 수행하는 동안 최대 각도 도달을 측정하고, 그것이 상한과 하한 사이에 있는지 확인합니다. 각도 측정은 모니터링의 시작에서 시작하고,모니터링 도중 토크가 트리거 토크를 처음 통과하는 지점에서 시작합니다.
매개변수 | 설명 |
|---|---|
유형 | 다음과 같은 네 가지 각도 유형을 사용할 수 있습니다. 피크 각도(기본값), 피크 토크에서의 각도, 차단 각도 및 종료 시 각도. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. |
하한 | 최저 허용 각도입니다. |
상한 | 최대 허용 각도입니다. |
YA - 항복에서의 각도
이 모니터는 항복 지점에서 도달한 피크 각도를 측정하고 피크 각도가 한계 내에 있는지 검사합니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100를 충족해야 합니다. |
항복 지점 비율 | 필수 조건: >= 20 % |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
하한 | 최저 허용 각도입니다. 필수 조건: >= 0 |
상한 | 최대 허용 각도입니다. 필수 조건: > 0 |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|

MT - 토크 평균
이 모니터는 모니터링 중 평균 토크를 측정하고 계산된 값이 한계치 이내인지 점검합니다.
매개변수 | 설명 |
|---|---|
유형 | 시작 조건을 지정합니다:
|
토크 트리거 | 유형이 트리거 토크, 각도 트리거 또는 각도 창에 설정되었을 때 사용할 수 있습니다. 필수 조건: >= 0 및 < 공구 최대 토크. |
각도 트리거 | 유형이 각도 트리거, 또는 각도 창에 설정되었을 때 사용할 수 있습니다. 필수 조건: > 0. |
각도 창 | 유형이 각도 창에 설정되었을 때 사용할 수 있습니다. 필수 조건: > 0.
|
시간 간격 | 유형이 시간 간격에 설정되었을 때 사용할 수 있습니다. 필수 조건: > 0. |
하한 | 최저 허용 토크입니다. |
상한 | 최고 허용 토크입니다. |
PT - 피크 토크
이 단계 모니터는 모니터링 동안 최대 토크 도달 및 초과를 측정하고, 그것이 상한과 하한 사이에 있는지 확인합니다.
매개변수 | 설명 |
|---|---|
하한 | 최저 허용 토크입니다. |
상한 | 최고 허용 토크입니다. |
PTCA - 포스트 스레드 컷 각도
모니터링 도중 도달한 각도를 측정하고 각도 한계 내에 포함되는지 점검합니다. 스레드 컷팅 각도 창의 끝에 도달할 때까지 트리거 토크 수준은 무시됩니다. 측정된 토크가 트리거 토크 이상이 되자마자 각도 측정이 즉시 시작됩니다. 중단 조건 매개변수가 각도 측정이 어디에서 종료할지 지정합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
스레드 컷팅 각도 창 | 필수 조건: > 0 |
각도 측정 유형 | 최대 각도 최대 토크 시 각도 차단 각도 종료 시 각도 |
스레드 컷 트리거 토크 | 필수 조건: >= 0 |
하한 | 필수 조건: >= 0 |
상한 | 필수 조건: > 0 필수 조건: > 하한 |
PTCPT - 포스트 스레드 컷 피크 토크
모니터링 도중 도달한 최대 토크와 오버슈트를 측정하고 토크 한계 사이에 포함되는지 점검합니다. 스레드 커트 각도 창의 끝에 도달할 때까지 모든 트리거 값이 무시됩니다.
매개변수 | 설명 |
|---|---|
스레드 컷 트리거 토크 | 필수 조건: >= 0 |
스레드 컷팅 각도 창 | 필수 조건: > 0 |
하한 | 필수 조건: >= 0 |
상한 | 필수 조건: > 0 필수 조건: > 하한 |
PVTH - 포스트 보기 토크 높음
이 모니터는 각도 창의 모든 토크 값이 토크 제한 사이에 있는지를 검사합니다.
매개변수 | 설명 |
|---|---|
시작 각도 | 필수 조건: >= 0 |
창 길이 | 필수 조건: <= 0 |
샘플 수 | 1 |
상한 | 최고 허용 토크입니다. |
PVTL - 포스트 보기 토크 낮음
이 모니터는 각도 창의 모든 토크 값이 토크 한계 사이에 있는지를 검사합니다.
매개변수 | 설명 |
|---|---|
시작 각도 | 필수 조건: >= 0 |
창 길이 | 필수 조건: <= 0 |
샘플 수 | 1 |
하한 | 최저 허용 토크입니다. |
PrT - 프리베일링 토크
이 모니터는 각도 창에서 우세한 토크값을 계산하고 한계 내에 있는지 검사합니다.
매개변수 | 설명 |
|---|---|
토크 보상 | 켜짐 또는 꺼짐 |
시작 각도 | 필수 조건: > 0 |
창 길이 | 필수 조건: >= 0 |
하한 | 필수 조건: > 0 |
상한 | 필수 조건: >= 0 |
SOT – 차단 토크
차단점은 단계가 목표에 도달하는 지점입니다. 토크는 차단점에서 측정되고 상한과 하한 사이에 있는 것으로 확인됩니다.
매개변수 | 설명 |
|---|---|
하한 | 최저 허용 토크입니다. |
상한 | 최고 허용 토크입니다. |
SOC - 전류 차단
차단점은 단계가 목표에 도달하는 지점입니다. 전류는 차단점에서 측정되고 상한과 하한 사이에 있는 것으로 확인됩니다.
매개변수 | 설명 |
|---|---|
하한 | 최저 허용 전류입니다. |
상한 | 최고 허용 전류입니다. |
SSD - 스틱 슬립 감지
이 단계 모니터는 단계 도중 스틱 슬립 효과를 감지합니다. 감지는 토크가 트리거 레벨 아래로 떨어지는 횟수를 계산하여 수행됩니다. 횟수가 최대 진동 수 보다 크면 스틱 오류가 보고됩니다. 모니터는 두 가지 다른 모드인 동적 또는 고정으로 작동합니다. 모드 사이의 차이는 트리거 레벨을 산출하는 방법입니다.
매개변수 | 설명 |
|---|---|
스틱 슬립 감지 유형 | 모니터 스틱 슬립 감지에서 수행 될 스틱 슬립 감지 유형을 지정합니다. 기본값: 동적 토크 |
최대 토크 비율 | 기본값: 80%, >=10 및 < 100를 충족해야 합니다. |
트리거 토크 | 기본값: 5, >= 0 및 < 공구 최대 토크를 충족해야 합니다. |
최대 진동 수 | 기본값: 5, >=3 및 < 20을 충족해야 합니다. |
Ti – 시간
모니터링 도중 경과된 시간을 측정하고 이것이 시간 제한 사이에 포함되는지 점검합니다. 시간 측정은 모니터링의 시작에서 시작하고, 트리거 토크가 지정된 경우에는 모니터링 도중 토크가 트리거 토크를 처음 통과하는 지점에서 시작합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 및 < 공구 최대 토크 |
하한 | 필수 조건: >= 0 |
상한 | 필수 조건: > 0 필수 조건: > 하한 |
TC - 토크 교정
이 모니터는 도달된 최대 토크가 토크 제한 내에 있는지 검사합니다.
매개변수 | 설명 |
|---|---|
Transducer type (트렌스듀서 유형) | 주 또는 보조 |
하한 | 필수 조건: >= 0 |
상한 | 필수 조건: > 0 필수 조건: > 하한 |
TG - 토크 경사도
이 모니터는 경사도가 제한 내에 있는지 점검합니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100를 충족해야 합니다. |
종료 지점 점검 | 예로 설정하면 단계의 종료 지점에서 측정된 경사도만 제한 내에 있는지 점검합니다. |
트리거 토크 | 각도 측정은 이 트리거에서 시작됩니다. 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
하한 | 최저 허용 토크 경사도입니다. 필수 조건: >= -100. |
상한 | 최대 허용 토크 경사도입니다. 필수 조건: -100 및 > 하한 |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|
각도 오프셋 | 종료 지점 점검이 아니오로 설정된 경우 사용할 수 있습니다. 트리거 토크가 처음으로 패스된 후 경사도 계산이 시작되는 각도를 지정합니다. |
TAW - 각도 창 내의 토크
모니터가 각도 창 길이 내의 모든 토크 값이 토크 한계내에 있는지 검사합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
시작 각도 | 필수 조건: > 0 |
창 길이 | 필수 조건: <= 0 |
하한 | 필수 조건: >= 0 |
상한 | 필수 조건: > 0 필수 조건: > 하한 |
창이 패스된 경우 NOK | 예로 설정한 경우, 각도 창의 끝에 도달하지 않으면 이 모니터의 상태는 NOK 입니다. |
TRD - 토크 비율 및 편차
이 단계 모니터는 토크 비율, 즉, 토크 대 각도의 비율을 측정하고 점검합니다. 상한과 하한에 의해 정의된 토크 비율 제한 내에 있는지 계산된 토크 비율이 확인됩니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 각도 시작 지점의 토크입니다. |
시작 지점 각도 | 트리거 토크에서 시작 지점 각도가 측정되면, 토크 측정이 시작됩니다. |
종료 지점 각도 | 토크의 측정이 정지된 각도 지점입니다. |
종료 지점 토크 | 토크의 측정이 정지된 토크입니다. |
하한 | 최저 허용 토크입니다. |
상한 | 최고 허용 토크입니다. |
한계 | 필수 조건: > 0 |
단계 제한
예기치 않은 일이 발생하는 경우에 조임을 분명히 중지하기 위해 다단계 조임 프로그램에 제한을 추가할 수 있습니다. 각 제한에 대해, 복구 가능 = 예를 선택하여 조임이 멈출 때 재시도를 허용해 주세요. 다단계 프로그램의 각 단계에는 최대 4가지 제한이 있을 수 있습니다.
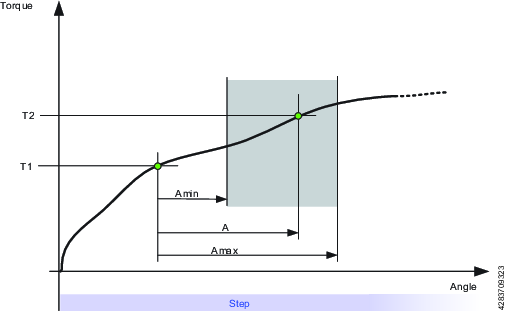
CTh - 크로스 스레드
이 제한은 토크가 시작 토크(T1)를 통과하는 지점부터 종료 토크(T2)를 통과하는 지점까지의 각도를 점검합니다. 시작 토크 (T1)에서 시작된 각도가 최대 한계(Amax) 보다 크면 공구가 즉시 정지되고 프로그램은 다음 동기화 지점으로 이동합니다.
토크가 종료 토크(T2)를 통과할 때 측정된 각도는 최소 각도 한계(Amin)에 대해 검사됩니다. 각도가 이 한계 보다 낮으면 공구가 즉시 정지되고 프로그램은 다음 동기화 지점으로 이동합니다.
매개변수 | 설명 | 그림 내 |
|---|---|---|
시작 토크 | 필수 조건: <= 0. | T1 |
종료 토크 | 필수 조건: <= 0. | T2 |
최소 한계 | 낮은 각도 한계 | A 최소 |
최대 한계 | 높은 각도 한계 | A 최대 |
A - 최대 각도
이 제한은 각도를 측정합니다. 측정된 각도가 최대 한계에 도달한 경우 경우 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점으로 이동합니다. 각도는 제한의 시작부터 측정되고, 또는 지정된 경우, 토크가 제한되는 동안 트리거 토크를 처음 통과한 지점부터 측정됩니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 지정된 경우, 이 각도가 측정되는 위치의 토크입니다. |
최대 한계 | 이 한계에 도달하면 공구가 즉시 정지되고 프로그램은 다음 동기화 지점으로 이동합니다. |
T - 최대 토크
이 제한은 해당 토크를 검사합니다. 측정된 각도가 최대 한계를 초과한 경우 경우 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점으로 이동합니다.
매개변수 | 설명 |
|---|---|
최대 한계 | 측정된 토크가 지정 된한계를 벗어난 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기 지점으로 이동합니다. |
RH - 리히트
이 제한은 해당 토크를 검사합니다. 측정된 토크가 토크 한계를 초과한 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다.
매개변수 | 설명 |
|---|---|
토크 한계 | 측정된 토크가 이 지정된 한계에 도달한 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다. |
RT - 잔류 토크
이 제한은 해당 토크를 검사합니다. 측정된 토크가 한계 토크 하한값 보다 낮은 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다.
매개변수 | 설명 |
|---|---|
취소 토크 한계 | 기본값: 10 Nm 필수 조건: > 0. |
TG - 토크 경사도
이 제한은 경사도를 검사하고, 경사도 한계를 벗어나면 공구는 즉시 정지되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100를 충족해야 합니다. |
트리거 토크 | 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
최소 한계 | 필수 조건: >= -100. |
최대 한계 | 필수 조건: -100 및 > 하한 |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|

TAW - 각도 창 내의 토크
이 제한은 각도 창에서 측정된 토크가 해당 한계 값 사이에 있는지를 검사합니다. 측정된 토크가 한계를 벗어난 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
시작 각도 | 필수 조건: >= 0 |
창 길이 | 필수 조건: > 0 |
최소 한계 | 필수 조건: >= 0 |
최대 한계 | 필수 조건: <= 최소 한계 |
TCD - 토크 대 전류 편차
이 제한은 대응하는 토크로 변환된 모든 전류 측정 상한이 토크 트랜스듀서가 있는 실제 측정 토크에서 최대 편차에 있는 것을 확인합니다. 제한은 토크가 단계 도중에 처음으로 트리거 토크에 도달할 때 시작하며, 단계가 목표에 도달할 때까지 활성화됩니다.
트리거 토크에 도달하지 않은 경우, 모니터가 OK를 출력합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
최대 편차 | 기본값: 1, > 0을 충족해야 합니다. |
결과 보고자
결과 보고자를 사용하면 결과에서 선택한 생산자의 특정 값을 추출할 수 있습니다. 결과 보고자는 단계에 속하지만 값을 판독할 모니터/제한과 연결되어 있어야 합니다. 결과 보고자와 동일한 단계에 있는 모니터 또는 제한만 선택할 수 있습니다. 결과 보고자는 모니터 및 제한과 같은 방식으로 드레그 엔 드롭하여 단계에 추가할 수 있습니다. 각 결과 보고자는 특정 결과 값(예: 런다운 각도, 최종 토크, 프리베일링 토크)의 보고를 담당합니다.
결과 보고자를 다음에 연결할 수 있습니다.
프로그램 모니터
단계 모니터
단계 제한
각 결과 보고자는 최종 값 유형을 정의합니다:
FA - 최종 각도
FC- 최종 전류
FT- 최종 토크
PT - 프리베일링 토크
RA - 런다운 각도
ST- 셀프-탭 토크
일반 매개변수
매개변수 | 설명 |
|---|---|
생산자 | 값을 생성하는 모니터/제한을 지정합니다. |
값 | 선택한 생산자에서 표시할 값을 지정합니다. |
한계:
주 경로의 단계에 속하는 모니터/제한 또는 프로그램 모니터/프로그램 제한에 결과 보고자를 추가할 수 있습니다.
한 단계에 여러 유형의 보고자가 존재할 수 있습니다.
예를 들면 모든 단계 및 프로그램 모니터 각도에 최종 각도 유형의 결과 보고자가 존재할 수 있습니다.
둘 이상의 결과 값이 있는 모니터/제한의 경우, 결과 리포터의 유형이 다르면 둘 이상의 결과 리포터를 추가할 수 있습니다.
단계 또는 프로그램 모니터/제한에 동일한 유형의 여러개의 결과 보고자가 존재하지 않을 수 있습니다.
가능한 각각의 최종 값 유형에 대해 하나의 결과만 보고됩니다.
규칙:
결과 항목의 내부 번호는 해당 결과 보고자와 동일해야 합니다.
모니터/제한 결과의 내부 번호는 구성에서 모니터/제한의 내부 번호와 동일해야 합니다.
단계 결과는 실행 순서에 따라 정렬되어야 합니다 첫 번째 실행 단계가 첫 번째 실행 순서이어야 합니다.
모니터/제한/단계에 있는 경우, 결과 보고자가 보고할 수 있는 값:
모니터/제한 측정 값 (플로트 또는 정수)
모니터/제한 상한 및 하한
상태
토크 트리거 및 각도 트리거
각도 목표 및 토크 목표 (단계에서 판독)
가능한 상태 값
적은 배터리 잔량
OK
높음
기타
NotSet
목표 값은 단계 모니터에 속해있지 않으므로, 모니터가 속한 단계에서 가져올 수 있습니다.
다단계 템플릿
다단계 프로그램을 만들 때 모든 템플릿은 탭 템플릿에서 볼 수 있습니다. 템플릿은 새로운 다단계 프로그램을 구축하기 위해 삽입할 수 있고 (끌어서 놓기) 기준으로 사용할 수 있습니다.
단계가 아직 추가되어 있지 않은 경우에만 템플릿을 다단계 프로그램에 끌어놓을 수 있습니다. 다단계 프로그램 템플릿을 끌어놓은 후, 나중에 단계가 더 추가될 수 있습니다.
템플릿이 프로그램에 연결되지 않고 복사되기 때문에 다단계 조임 프로그램을 수정할 때 템플릿 자체는 영향을 받지 않습니다.
라이브러리 > 프로그램 템플릿에서 다단계 프로그램 템플릿을 만듭니다.
다단계 조임 프로그램 속성
매개변수 | 설명 |
|---|---|
이름 | 다단계 프로그램에 대한 사용자 정의된 이름입니다. |
설명 | 다단계 프로그램의 설명. |
유형 | 조임 유형을 설정합니다 (예: 고정물). |
스레드 방향 | 시계 방향(CW) 또는 반시계 방향(CCW). 일반적으로 이 방향은 시계 방향입니다. |
프로그램 제한
매개변수 | 설명 |
|---|---|
최대 시간 제한 | 초 단위로 설정합니다. 이 제한은 조임에 대한 총 시간을 확인하고 최대 시간 한계를 초과하는 경우 공구는 즉시 중지됩니다. 시간은 프로그램의 시작부터 측정합니다. |
최대 토크 한계 | 한계치를 설정하십시오. 이 제한은 토크를 확인하고 측정된 토크가 최대 토크 한계를 초과하는 경우, 공구는 즉시 정지됩니다. |
프로그램 모니터
매개변수 | 설명 |
|---|---|
각도 | 전체 프로그램에 대한 각도 모니터링을 켜기 또는 끄기로 설정합니다. 단계에서 사용함 및 트리거 토크가 비어있는 경우, 각도 모니터링은 프로그램 시작 시에 시작됩니다. |
단계에서 사용함 | 각도 모니터링이 유효한 단계의 범위를 설정합니다. 끝 단계가 지정되지 않은 경우, 각도 모니터링은 소켓 해지 단계가 아닌 프로그램의 마지막 단계에서 정지됩니다. |
유형 | 각도 모니터의 종류:
|
트리거 토크 | 각도 모니터링을 위한 트리거 토크의 값을 설정합니다. |
하한 | 각도 모니터링 (프로그램) 하한을 설정합니다. |
상한 | 각도 모니터링 (프로그램) 상한을 설정합니다. |
매개변수 | 설명 |
|---|---|
토크 | 전체 프로그램에 대한 토크 모니터링을 켜짐 또는 꺼짐로 설정합니다. 단계에서 사용함이 비어있는 경우, 각도 모니터링은 프로그램 시작 시에 시작됩니다. |
단계에서 사용함 | 토크 모니터링이 유효한 단계의 범위를 설정합니다. 끝 단계가 지정되지 않은 경우, 토크 모니터링은 소켓 해지 단계가 아닌 프로그램의 마지막 단계에서 정지됩니다. |
유형 | 각도 모니터의 종류:
|
하한 | 토크 모니터링 (프로그램) 하한을 설정합니다. |
상한 | 토크 모니터링 (프로그램) 상한을 설정합니다. |
확인
매개변수 | 설명 |
|---|---|
공구 값 대비 검증 | 공구가 알려진 경우에 켜짐을 사용하고 최대 토크와 최대 속도를 설정합니다. 공구를 알 수 없는 경우 꺼짐 사용합니다. |
공구 | 유효성을 검사할 공구를 선택하기위한 드롭 다운. |
최대 토크 | 유효성을 검사하기 위한 공구의 최대 토크. |
최대 속도 | 유효성을 검사하기 위한 공구의 최대 속도. |
부착물 조정
매개변수 | 설명 |
|---|---|
부착물 세부 조정 사용 | 부착물 조정을 켜거나 끌 것인지 선택하세요. |
기어비 | 기어비 값이 0.5 ~ 4.0 사이여야 함. |
효율성 조율 | 효율성 값이 0.5 ~ 1.0 사이여야 함 |
보고자
이를 통해 사용자는(모니터/제한에서) 최종 값으로 표시할 값을 선택할 수 있습니다. 추가를 클릭하여 프로그램 모니터/제한 값에 연결할 결과 보고자를 선택하세요.
매개변수 | 설명 |
|---|---|
보고자 | 결과 보고자를 선택합니다. |
생산자 | 값을 생성하는 모니터/제한을 선택합니다. |
값 | 선택한 생산자에서 표시할 값을 선택합니다. |
동기화 모드 탭 작업
동기화 모드는 다음의 경우에 사용됩니다.
동기화된 조임 또는 포함될 공구 정의
각 공구가 실행할 조임 또는 풀기 프로그램의 지정
거부 관리 처리 (동기화 모드에만 유효)
동기화 모드를 사용하면 고정된 솔루션의 여러 공구가 동시에 여러가지 다단계 프로그램을 실행할 수 있게 해줍니다.
유연한 생산 라인에서는, 새로운 제품마다 다른 동기화 모드 사용이 필요할 수 있습니다. 동기화 모드 기능을 사용하면 각 구성에 대한 모드를 설정할 수 있습니다.
각 라인은 하나의 동기화 모드를 나타냅니다. 열이 포함하는 정보:
열 | 설명 |
|---|---|
확인란 | 예를 들어, 동기화 모드를 삭제할 때 사용합니다. |
이름 | 조임 동기화 모드의 경우, 각 이름은 인덱스 번호로 시작한 다음 사용자 정의 이름으로 시작합니다. 풀기 동기화 모드는 사용자 정의 이름만 포함할 수 있습니다. |
채널 | 동기화 모드의 채널 수입니다. |
마지막 저장 | 최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다. |
마지막 저장: | 구성 데이터를 저장한 사용자를 나타냅니다. |
컨트롤러 업데이트됨 | 컨트롤러가 업데이트된 시간으로 컨트롤러 시간으로 표시됩니다. |
컨트롤러를 업데이트한 사용자: | 컨트롤러를 마지막으로 업데이트 한 사용자를 나타냅니다. |
동기화 모드 추가하기
공장 구조
에서 컨트롤러를 선택합니다.메뉴 모음에서 동기화 모드
 아이콘을 선택합니다. 작업 영역은 현재 동기화 모드의 전체 목록을 보여줍니다.
아이콘을 선택합니다. 작업 영역은 현재 동기화 모드의 전체 목록을 보여줍니다. 추가 명령어 버튼을 선택하고 이름 및 인덱스를 입력합니다. (조임 동기화 모드에만 유효)
작동 모드 드롭 다운 메뉴에서 조임 또는 풀기를 선택합니다.
새로운 동기화 모드가 가능한 가장 낮은 위치에 추가되고 목록이 업데이트됩니다.
동기화 모드 삭제하기
공장 구조
에서 컨트롤러를 선택합니다.메뉴 모음에서 동기화 모드
아이콘을 선택합니다. 작업 영역은 현재 동기화 모드의 전체 목록을 보여줍니다. 삭제할 각 동기화 모드의 경우 작업 영역에서 제일 왼쪽에 있는 열의 확인란에 표시합니다.
관리를 선택한 다음, 드롭다운 메뉴에서 삭제를 선택합니다.
선택한 동기화 모드가 제거되고 목록이 업데이트됩니다.
조임 동기화 모드 구성 처리하기
동기화 모드를 구성하려면 조임 동기화 모드를 더블 클릭합니다.
속성
매개변수 | 설명 |
|---|---|
이름 | 해당 모드에 대한 사용자 정의된 이름입니다. |
설명 | 모드에 대한 설명입니다. |
풀기 동기화 모드 참조
조임 동기화 모드는 풀기 동기화 모드에 연결할 수 있습니다. 풀기 동기화 모드 참조는 조임 동기화 모드의 속성 메뉴에 있습니다.
풀기 동기화 모드 드롭 다운 메뉴에서 풀림 동기화 모드를 선택합니다.
조임 동기화 모드의 볼트 구성에 사용 된 볼트 구성 수와 채널 번호는 선택한 풀기 동기화 모드와 동일해야하며 서로 다른 경우 경고 메시지가 표시됩니다.
거부 관리
매개변수 | 설명 |
|---|---|
실패 단계의 최대 수 | 전체적 조임을 실행하는 동안 실패할 수있는 여러 단계의 최대 수를 지정합니다. 같은 단계를 한 번 이상 실패되는 것은 문제가되지 않으며, 여전히 하나의 실패 단계로서 계산됩니다. |
초과할 경우의 작업 | 최대 실패 단계 수가 초과된 경우의 조치를 지정합니다. |
수리 중 NOK인 경우의 작업 | 수리가 진행되는 동안 새 오류(NOK)가 감지된 경우 작업을 지정합니다. |
트리거
동기화 지점 테이블을 보려면 볼트 구성에서 적어도 하나의 볼트에 대해 동기 지점이 있는 조임 프로그램이 선택되어야 합니다.
프로그램의 주 경로에 있는 각 동기화 지점에 대한 거부 관리를 제어하기 위해 다른 트리거를 지정할 수 있습니다.
트리거 추가
트리거 추가 아이콘의 옆에 있는 + 아이콘을 클릭하십시오.
트리거를 선택합니다.
각 동기화 지점에 대한 작업을 설정합니다.
트리거 삭제
트리거 추가 아이콘의 옆에 있는 + 아이콘을 클릭하십시오.
삭제할 트리거 옆에 있는 삭제 아이콘을 클릭하십시오.
기본 트리거 매개변수 | 설명 |
|---|---|
동기화 지점 | 선택한 조임 프로그램의 동기화 지점 |
기본 실패 | 선택한 조임 프로그램의 동기화 지점 다른 조건들 중 아무것도 충족되지 않으면 사용됩니다. |
기본 실패 기타 | 이 매개 변수는 끝 또는 종료를 사용하지 않는 공구에 대한 작업을 정의합니다. |
수리 매개변수의 수 | 설명 |
|---|---|
수리 | 동기화 지점에서 시작할 수있는 최대 수리 횟수를 지정합니다. 설정하지 않으면 수리 횟수를 무제한으로 설정할 수 있습니다. |
수리 작업 | 최대 수리 횟수가 작성되고 새로운 오류가 발생하는 경우 작업을 지정합니다. |
수리 작업 기타 | 이 매개 변수는 끝 또는 종료를 사용하지 않는 공구에 대한 작업을 정의합니다. |
NOK 채널 매개변수 | 설명 |
|---|---|
NOK 채널 | 동기화 지점에서 실패 할 수 있는 최대 채널 수를 지정합니다. 실패 채널의 수를 지정하지 않은 경우, 설정은 작업을 결정하기 위해 사용되지 않습니다 |
NOK 채널 작업 | 동기화 지점에서 NOK 채널 이상의 채널이 실패한 경우 작업을 지정합니다. |
NOK 채널 기타 | 이 매개 변수는 끝 NOK 또는 종료 NOK를 실행하지 않는 공구에 대한 작업을 정의합니다. |
NOK 그룹 매개변수 | 설명 |
|---|---|
NOK 그룹 | 동기화 지점에서 실패할 수있는 최대 그룹 수를 지정합니다. 실패 그룹의 수를 지정하지 않은 경우, 설정은 작업을 결정하기 위해 사용되지 않습니다. |
NOK 그룹 작업 | 동기화 지점에서 NOK 그룹 이상의 그룹이 실패하는 경우, 작업을 지정합니다. |
NOK 그룹 기타 | 이 매개 변수는 끝 NOK 또는 종료 NOK를 실행하지 않는 공구에 대한 작업을 정의합니다. |
수리할 수 없는 매개변수 | 설명 |
|---|---|
수리 가능하지 않음 | 동기화 지점의 총 상태가 수리 불가능한 경우 작업을 지정합니다. |
NOK 수리 가능 기타 | 이 매개변수는 끝 또는 종료를 실행하지 않는 공구의 작업을 정의합니다. |
볼트 구성
볼트 구성을 추가하려면, 추가 또는 여러 개 추가를 선택합니다. 최대 64개의 볼트 구성을 갖을 수 있습니다.
매개변수 | 설명 |
|---|---|
확인란 | 예를 들어 채널을 삭제할 때 사용됩니다. |
채널 | 드라이브 인덱스라고도 불리는 채널 번호입니다. |
조임 프로그램 | 메뉴 조임 프로그램에 정의된 조임 프로그램을 선택합니다. |
볼트 | 조임이 수행될 때 조여지는 실제 패스너입니다. 이 번호는 특정 볼트에 대한 데이터를 수집할 때 사용됩니다. (예: 필드 버스신호 볼트 조임 상태.) |
볼트 이름 (선택 사항) | 볼트의 이름 |
그룹 | 수리 그룹은 수리를 실행할 때 서로 의존하는 볼트를 그룹화하는 용도로 사용됩니다. 하나의 채널은 하나 이상의 수리 그룹에 속할 수 없습니다. |
거부 관리
거부 관리 기능은 실패한 단계를 자동으로 수리하거나 종료할 때 사용됩니다. 각 동기화 지점에서 조임 상태가 평가됩니다. 상태가 OK 인 경우, 조임 프로그램의 다음 부분이 시작됩니다. 상태가 NOK 인 경우, 조임 프로그램을 수리 또는 하는 조치가 취해집니다.
각 동기화 지점의 수리 경로는, 조임 프로그램의 수리 영역에서 정의됩니다.
각 동기화 지점으로부터의 종료 경로는 조임 프로그램의 종료 영역에서 정의됩니다
동기화 지점에서의 상태
모든 공구가 동기화 지점에 도달하면 각 공구의 상태와 전체 상태가 평가됩니다.
양호 | NOK | 수리 가능하지 않음 | 치명적 | |
|---|---|---|---|---|
공구의 상태 | 지금까지 모든 공구는 OK 상태입니다. | 모니터가 동기화 지점 이전의 단계에서 오류를 감지했습니다. 이러한 오류의 경우 수리가 가능합니다. | 동기화 지점 이전의 단계에서 제한 사항을 적용하여 오류를 감지했습니다. | 동기화 지점 이전의 단계에 치명적인 오류가 있습니다. 그 이유는 다음과 같습니다: |
수리 그룹의 상태 | 수리 그룹의 모든 공구가 OK 상태의 동기화 지점에 도달했습니다. | 수리 그룹의 공구 중 하나 이상이 NOK 상태인 동기화 지점에 도달했습니다. (그리고 그 중 어떤 것의 상태도 수리 불가능 하거나 치명적이지 않음). | 수리 그룹의 공구 중 하나 이상이 수리 불가능 상태인 동기화 지점에 도달했습니다. (그리고 그 중 어떤 공구의 상태도 치명적이지 않음) | 적어도 수리 그룹의 공구 중 하나 이상이 치명적 상태의 동기화 지점에 도달했습니다. |
전체 상태 | 모든 공구가 OK 상태의 동기화 지점에 도달했습니다. 이 프로그램의 실행은 조임의 다음 단계로 계속됩니다. | 공구 중 하나 이상이 NOK 상태인 동기화 지점에 도달했습니다. (그리고 그 중 어떤 것의 상태도 수리 불가능 하거나 치명적이지 않음). | 공구 중 하나 이상이 수리 불가능 상태인 동기화 지점에 도달했습니다. (그리고 그 중 어떤 공구의 상태도 치명적이지 않음.) | 공구 중 하나 이상이 치명적 상태의 동기화 지점에 도달했습니다. |
동기화 지점의 총 상태가 NOK이면 작업을 계산합니다.
동기화 지점의 총 상태가 NOK이면 적용 가능한 작업이 계산됩니다. 동작은 설정된 트리거에 따라 결정됩니다. 수행된 첫 번째 트리거는 수행할 작업을 결정합니다:
실패한 최대 단계 수 초과:
전체 조임에서 실패 단계의 총 수가 실패 단계의 최대 수를 초과하는 경우 초과 작업이 사용됩니다. 같은 단계를 한 번 이상 실패되는 것은 여전히 하나의 실패 단계로서 계산됩니다.최대 수리 단계 수 초과:
현재 동기화 지점에서 시작된 총 수리 수가 수리 횟수 트리거의 수리 횟수를 초과하면 수리 작업이 사용됩니다.실패 그룹의 최대 수:
실패 그룹의(상태가 NOK인 그룹) 수가NOK 채널 수 트리거의 NOK 그룹 수를 초과하면 NOK 그룹 작업이 사용됩니다.실패 공구의 최대 수:
실패 공구의(상태가 NOK인 공구) 수가NOK 채널 수 트리거의 NOK 그룹 수를 초과하면 NOK 그룹 작업이 사용됩니다.기본 실패 작업:
위 조건 중 어느 것도 충족되지 않으면 기본 실패 작업의 설정이 사용됩니다.
수리를 실행하는 작업
수리를 실행하는 공구는 복구 경로에서 단계들을 실행하고 이전 동기화 지점으로 다시 이동합니다. 수리는 프로그램이 수리를 시작한 동기화 지점으로 돌아올 때까지 진행됩니다. 수리가 완료되면 공구, 수리 그룹 및 전체 상태의 상태가 다시 평가됩니다. 현재 전체 상태가 OK 인 경우, 모든 공구는 다음 단계로 계속 진행되고, 그렇지 않으면 새로운 수리 또는 종료가 시작됩니다.
수리를 실행하지 않는 공구는 현재 동기화 지점에 머무르며 수리가 끝날 때까지 대기합니다.
상태에 대한 작업 | 전체 상태 NOK |
|---|---|
수리 NOK | NOK 상태의 모든 공구는 수리를 실행합니다. 수리를 실행하지 않는 공구는 현재 동기화 지점에 머무르며 수리가 끝날 때까지 대기합니다. |
NOK 그룹 수리 | NOK 상태의 수리 그룹에 속한 모든 공구는 수리를 실행합니다. 수리 그룹의 모든 공구는 개별 상태에 관계없이 수리를 실행합니다. 수리를 실행하지 않는 공구는 현재 동기화 지점에 머무르며 수리가 끝날 때까지 대기합니다. |
모두 수리 | 상태에 관계없이 모든 공구가 수리를 실행합니다. |
종료를 실행하는 작업
종료를 실행하는 공구는 종료 경로에서 단계를 실행합니다. 그런 다음 NOK 상태로 조임이 완료됩니다.
상태에 대한 작업 | 전체 상태 NOK | 전체 상태 수리할 수 없음 |
|---|---|---|
NOK 종료 | NOK 상태의 모든 공구는 종료를 실행합니다. | NOK 또는 수리 불가능 상태의 모든 공구는 종료를 실행합니다. |
NOK 그룹 종료 | NOK 상태의 수리 그룹에 속한 모든 공구는 종료를 실행합니다. 수리 그룹의 모든 공구는 개별 상태에 관계없이 종료를 실행합니다. | NOK 또는 수리 불가능 상태의 수리 그룹에 속한 모든 공구는 종료를 실행합니다. 수리 그룹의 모든 공구는 개별 상태에 관계없이 종료를 실행합니다. |
모두 종료 | 상태에 관계없이 모든 공구는 수리를 실행합니다. | |
상태가 OK인 공구는 기타 설정에 따라 계속 작동됩니다.
- 계속, 다른 공구는 종료가 완료될 때까지 현재 동기화 지점에서 대기합니다. 그런 다음, 다른 공구는 조임 프로그램의 나머지 부분을 계속 진행합니다.
- 모두 종료, 다른 공구는 조임을 종료합니다.
조임 프로그램을 종료하는 작업
조임 프로그램을 종료하는 공구는 어떠한 다른 단계도 실행하지 않고 바로 종료됩니다. 그런 다음 NOK 상태로 조임이 완료됩니다.
상태에 대한 작업 | 전체 상태 NOK | 전체 상태 수리할 수 없음 |
|---|---|---|
NOK 끝내기 | NOK 상태의 모든 공구는 종료 경로를 실행하지 않고 조임을 종료합니다. | NOK 또는 수리 불가능 상태의 모든 공구는 종료 경로를 실행하지 않고 조임을 종료합니다. |
NOK 그룹 종료하기 | NOK 상태의 모든 수리 그룹에 속한 모든 공구는 종료 경로를 실행하지 않고 조임을 종료합니다. 수리 그룹의 모든 공구는 개별 상태에 관계없이 종료됩니다. | NOK 또는 수리 불가능 상태의 수리 그룹에 속한 모든 공구는 종료 경로를 실행하지 않고 조임을 종료합니다. 수리 그룹의 모든 공구는 개별 상태에 관계없이 종료됩니다. |
모두 끝내기 | 모든 공구는그 상태와 관계 없이, 종료 경로를 실행하지 않고 조임을 종료합니다. | |
상태가 OK인 공구는 기타 설정에 따라 계속 작동됩니다.
- 계속: 다른 공구는 조임 프로그램의 나머지 부분을 계속 진행합니다.
- 모두 종료: 다른 공구는 종료를 실행합니다.
치명적인 전체 상태에 대한 작업
전체 상태가 치명적인 경우 수리가 불가능합니다. 치명적인 상태의 공구는 더 이상 실행할 수 없기 때문에 조임이 종료됩니다. 다른 공구는 개별 상태에 관계없이 종료됩니다.
볼트 중 하나가 NOK이지만 조임 프로그램에서 수리 조치가 구성되어 있지 않으면, 모드는 모두 종료를 실행합니다. NOK는 해당 볼트에 대한 NOK의 주요 원인을 설명합니다.
볼트 중 하나가 NOK이고 수리 경로를 갖고 있는 경우 시스템은 NOK 볼트에서 최대 시간 제한에 도달할 때까지 수리를 시도합니다. OK 상태인 다른 볼트도 대기 상태로 전환됩니다. n번 수리 후 볼트가 정상적으로 작동되면, 프로그램은 위의 첫 번째 머리글 처럼 모든 볼트에 대해 계속 작업을 진행합니다. 볼트가 여전히 OK이 상태가 아닌 경우, 전체 동기화 모드가 머리글 2와 같이 종료됩니다.
풀기 동기화 모드 구성 처리하기
동기화 모드를 구성하려면 풀기 동기화 모드를 더블 클릭합니다.
매개변수 | 설명 |
|---|---|
이름 | 해당 모드에 대한 사용자 정의된 이름입니다. |
설명 | 모드에 대한 설명입니다. |
볼트 구성
풀기 동기화 모드의 볼트 구성은 풀기 다단계 프로그램에만 연결할 수 있으며 사용 가능한 풀기 다단계 프로그램만 열거합니다.
볼트 구성을 추가하려면, 추가 또는 여러 개 추가를 선택합니다. 최대 64개의 볼트 구성을 갖을 수 있습니다.
매개변수 | 설명 |
|---|---|
확인란 | 예를 들어 채널을 삭제할 때 사용됩니다. |
채널 | 드라이브 인덱스라고도 불리는 채널 번호입니다. |
풀기 프로그램 | 메뉴 조임 프로그램에 정의된 풀기 다단계 프로그램을 선택합니다. |
풀기 동기화 모드
풀기 동기화 모드는 다음과 같은 가능한 방법으로 실행할 수 있습니다.
위의 모든 사례가 제대로 작동하려면 조임을 시작하기위한 모든 조건이 반드시 충족되어야합니다 (예: 비상 정지 없음, 신호 활성화 설정 등)
풀기 선택 입력을 사용하여 풀기 동기화 모드 실행
풀기 동기와 모드와 관련된 조임 동기화 모드를 선택합니다.
이 작업은 필드버스 및 SoftPLC
아래 필드버스 하위탭의 컨트롤러로 영역에 I/O 신호 입력 선택, ID 10020을 추가하여 수행하거나 가상 스테이션 탭  아래의 작업에서 작업을 선택하여 수행할 수도 있습니다.
아래의 작업에서 작업을 선택하여 수행할 수도 있습니다.
필드버스 및 SoftPLC
아래 필드버스 하위탭의 컨트롤러로 영역에 I/O 신호 풀기 선택, ID 10029를 사용하여 풀기를 선택하세요.다음 2개의 신호중 하나를 사용하여 풀기를 시작하세요.
드라이브 시작 (지속), ID 10028
드라이브 시작 (펄스), ID 10113
풀기 시작 입력을 사용하여 풀기 동기화 모드 실행
풀기 동기와 모드와 관련된 조임 동기화 모드를 선택하세요.
이 작업은 필드버스 및 SoftPLC
아래 필드버스 하위탭의 컨트롤러로 영역에 I/O 신호 입력 선택, ID 10020을 추가하여 수행하거나 가상 스테이션 탭 아래의 작업에서 작업을 선택하여 수행할 수도 있습니다.
다음 2개의 신호중 하나를 사용하여 풀기를 시작하세요.
풀기 시작 (지속), ID 10011
펄스 시작 풀기 (펄스), Id 10072
동기화 모드 복사하기 및 붙여넣기
기존 동기화 모드는 복사하여 동일한 컨트롤러에 붙여 넣거나 한 컨트롤러에서 복사한 다음 다른 컨트롤러에 붙여 넣을 수 있습니다.
복사하기 및 붙여넣기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
메뉴 모음에서, 동기화 모드
 탭 아이콘을 선택합니다. 작업 공간에는 사용 가능한 동기화 모드가 표시됩니다.
탭 아이콘을 선택합니다. 작업 공간에는 사용 가능한 동기화 모드가 표시됩니다.다음 중 하나를 수행하여 동기화 모드를 복사하십시오:
복사할 동기화 모드를 마우스 오른쪽 버튼으로 클릭한 다음 메뉴에서 복사를 선택합니다.
또는 각 행 앞에있는 확인란을 선택하고, 마우스 오른쪽 버튼을 클릭한 다음, 메뉴에서 복사를 선택하여 여러개 동기화 모드를 선택할 수 있습니다.
공장 구조에서
, 동기화 모드를 붙여 넣을 컨트롤러를 선택합니다. 메뉴 모음에서, 동기화 모드
탭을 선택한 다음, 마우스 오른쪽 버튼으로 작업 영역의 아무 곳이나 클릭하고 붙여 넣기를 선택합니다. 새로운 동기화 모드는 목록의 첫 번째로 사용할 수 있는 위치에 추가됩니다.
여분의 슬롯이 없는 경우, 동기화 모드는 목록의 가장 아래에 추가되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 순서를 재배열하기 위해 인덱스 번호를 변경할 수 없습니다. (조임 동기화 모드에만 유용합니다)
동기화 모드를 붙여 넣을 때, 연결된 다단계 조임 프로그램도 포함됩니다. 해당 멀티 스텝 조임 프로그램에 연결된 느슨해 진 동기화 모드는 기본적으로 복사되지 않습니다. 최대 수에 이미 도달했기 때문에, 다단계 조임 프로그램을 가져올 공간이 없는 경우, 전체 붙여 넣기 작업이 실패합니다.
동기화 모드 내보내기
동기화 모드는 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기 및 가져오기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
공장 구조
에서, 목록의 컨트롤러를 선택합니다.메뉴 모음에서, 동기화 모드
탭 아이콘을 선택합니다. 작업 영역은 현재 동기화 모드의 전체 목록을 표시합니다.내보낼 동기화 모드의 확인란을 선택합니다.
관리를 선택한 다음 드롭다운 메뉴에서 내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <동기화모드이름>.json이며, 내보낸 파일에는 *.json 확장자를 가진 이름을 지정할 수 있습니다.
저장을 선택합니다.
동기화 모드 가져오기
동기화 모드는 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기 및 가져오기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
공장 구조
에서, 목록의 컨트롤러를 선택합니다.메뉴 모음에서, 동기화 모드
탭 아이콘을 선택합니다. 작업 영역은 현재 동기화 모드의 전체 목록을 표시합니다. 추가 명령 버튼을 선택한 다음, 가져오기를 선택합니다.
파일 열기를 선택하고 관련 .json 파일을 검색합니다.
추가를 선택합니다.
동기화 모드를 가져올 때, 연결된 다단계 조임 프로그램도 포함됩니다. 최대 수에 이미 도달했기 때문에, 다단계 조임 프로그램을 가져올 공간이 없는 경우, 전체 가져오기 작업이 실패합니다.
배치 시퀀스로 작업하기
배치 시퀀스 작업은 가상 스테이션 작업 구성이나 외부 입력 신호에 의해 선택됩니다.
조임 순서는 고정된 방식을 따르거나 작업자가 자유롭게 순서를 결정하도록 놔둘 수 있습니다. 어떤 경우이든, 소켓 또는 신호를 사용하여 컨트롤러와 작업자 사이의 통신할 수 있습니다.
배치는 여러 번 반복되는 한 조임 프로그램으로 구성되어 있습니다.
배치 시퀀스는 작업이 배치/조임 프로그램의 조합을 필요로 할 때 쓰는 배치의 순서 집합입니다.
공장 구조
에서 컨트롤러를 선택합니다. 배치 시퀀스
 로 이동합니다.
로 이동합니다.
열이 포함하는 정보:
열 | 설명 |
|---|---|
이름 | 각각의 배치 시퀀스 이름은 인덱스 번호로 시작합니다. 다음 문자는 아무 사용자 정의 이름으로 변경될 수 있습니다. |
마지막 변경 | ToolsTalk 2 시간으로 표현됩니다. |
마지막 변경자 | <사용자>가 마지막으로 변경한 구성 데이터. |
컨트롤러 업데이트됨 | 컨트롤러 시간으로 표현됩니다. |
컨트롤러를 업데이트한 사용자 | <사용자>가 갱신한 컨트롤러. |
변경자 및 컨트롤러 갱신자 필드는 등록된 ToolsTalk 2 인터페이스에서 등록된 ToolsTalk 2 사용자일 수 있습니다.
명령 | 설명 |
|---|---|
관리 |
구성이 삭제될 때 구성 목록은 인덱스 번호 방식에서 잘못된 것을 표시됩니다. 인덱스 번호는 변경되지 않습니다. 새로운 구성을 추가하면 구성의 가장 낮은 빈 인덱스 위치를 찾기 위해 시도합니다. |
추가 | 새로운 배치 시퀀스를 만들고 가져옵니다. |
배치 시퀀스 이름은 선택 문자와 결합된 인덱스 번호로 구성되어 있습니다. 인덱스 위치를 변경할 수 없습니다. 새로운 구성은 사용 가능한 가장 낮은 인덱스 번호가 부여됩니다. 작업 선택 과정의 일부가 될 소스와 식별자 번호를 사용할 때 인덱스 번호는 중요합니다.
배치 시퀀스 구성 작업 영역
배치 시퀀스 구성 작업 영역이 표시하는 단일 배치 시퀀스 정보에 포함된 구성 메뉴:
구성 이름 및 설명을 포함하는 기본 설정.
일반 설정으로, 조임의 흐름과 순서를 제어합니다.
시퀀스 구성으로, 개별 조임 프로그램에서 배치 시퀀스를 만듭니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.메뉴 모음에서 배치 시퀀스
를 선택합니다.원하는 배치 시퀀스의 이름을 두 번 클릭하여 메뉴를 표시합니다.
배치 시퀀스 구성 메뉴
속성 메뉴의 옵션은 다음과 같습니다:
매개변수 이름 | 설명 |
|---|---|
이름 | 기본 이름 배치 시퀀스 편집할 수 있습니다. |
설명 | 배치 시퀀스용으로 제작된 선택적 설명 |
배치 시퀀스 완료 시 공구 잠금 | 켜짐: 배치 시퀀스가 완료되면 공구는 잠깁니다. 꺼짐: 배치 시퀀스가 완료되면 공구는 잠금 해제된 상태로 남아있습니다. |
자유 순서 | 아니요: 시퀀스 내의 배치는 인덱스 번호 순서대로 실행됩니다. 소켓이 지정되면 시스템은 배치가 수행될 시점의 다음 소켓에 대하여 안내합니다. 예: 시퀀스 내의 조임 및 배치는 임의의 순서로 실행될 수 있습니다. 식별자 번호 역할을 하는 소켓 선택자 부분을 사용하여 실행될 배치가 무엇인지 작업자가 시스템에 지시합니다. |
NOK 시 증분 | 아니요: 조임이 실패하는 경우 (NOK) 배치 카운터는 증가하지 않습니다. 예: 조임이 실패하는 경우 (NOK) 배치 카운터가 증가합니다. |
최대 연속 NOK | 최대 연속 NOK는 한 배치 내에서 지정된 최대 허용 연속 조임 실패 횟수입니다. 값에 도달하면, 너무 많은 NOK 조임(4020) 이벤트가 표시됩니다. |
풀기 작업시 감소 | 항상 꺼짐: 풀기 작업을 수행할 때 배치 카운터의 계수는 감소되지 않습니다. 이것은 기본 값입니다. 언제나: 풀기 작업을 수행할 때 배치 카운터의 계수가 감소됩니다. 마지막 조임시 OK: 앞서 수행한 조임이 OK인 경우, 풀기를 실행할 때 배치 카운터의 계수가 감소합니다. |
시퀀스 중단 타이머 | 켜짐: 선택된 배치 시퀀스는 지정된 시간 한계 내에 취소할 수 있습니다. 켜짐을 선택하면 중단 타이머 필드가 열립니다. 꺼짐: 선택한 배치 시퀀스는 취소할 수 없습니다. |
중단 시간 | 선택된 배치 시퀀스를 중단하는 동안의 시간(초). 허용 범위는 1 s ~ 1600 s 사이입니다. |
배치 시퀀스가 완료되는 경우(공구가 잠길 수 있음):
모든 조임은 OK 또는 NOK 결과로 완료됩니다.
시퀀스 중단 신호가 작업을 종료합니다. 조임 미수행은 NOK 결과를 보고합니다.
시퀀스 구성 메뉴에서, 다른 배치들이 한 배치 시퀀스로 결합됩니다. 배치는 여러 번 반복되는 한 조임 프로그램으로 구성되어 있습니다.
시퀀스 구성 메뉴의 각 행은 한 개의 배치를 나타냅니다.
열 | 설명 |
|---|---|
확인란. | |
배치 | 배치 인덱스 번호(시퀀스 내에서 순서 번호). |
조임 프로그램 | 드롭다운 메뉴 이 배치를 위한 프로그램을 선택합니다. |
배치 크기 | 배치에 포함된 조임 횟수. |
식별자 번호 | 외부에서 생성된 식별자 번호 또는 식별자 번호로 변환된 소켓 선택기 위치.
|
배치 시퀀스에 새 배치 추가하기
공장 구조
에서, 목록의 컨트롤러를 선택합니다.메뉴 모음에서, 배치 시퀀스
탭을 선택합니다. 작업 공간에는 배치 시퀀스 목록이 표시됩니다.시퀀스 구성 메뉴에서 추가 명령 버튼을 클릭합니다. 배치 시퀀스 생성 창이 열립니다
이름으로 배치 시퀀스를 생성한 다음 추가를 선택합니다.
속성에서 관련 매개변수를 선택합니다.
조임 프로그램에서 배치에 대한 동기화 모드를 선택합니다.
배치 크기를 입력합니다. (배치를 구성하는 조임 횟수)
선택 사항인 식별자 번호를 입력합니다.
배치 시퀀스는 시퀀스 목록에서 첫 번째 자유 위치로 생성됩니다. 여분의 슬롯이 없는 경우, 목록의 가장 아래에 배치되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 배치 조임 순서를 재배열하기 위해 인덱스 번호를 변경할 수 없습니다.
배치 시퀀스 복사하기 및 붙여넣기
기존 배치 시퀀스는 복사하여 동일한 컨트롤러에 붙여 넣거나 한 컨트롤러에서 복사한 다음 다른 컨트롤러에 붙여 넣을 수 있습니다.
복사 및 붙여 넣기는 동일한 컨트롤러에서 실행하거나 동일한 유형의 다른 컨트롤러에서 동일한 소프트웨어 버전을 실행하는 경우에만 가능합니다.
기존 배치 시퀀스를 복사할 때, 배치 시퀀스와 관련된 모든 프로그램도 복사됩니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
메뉴 모음에서 배치 시퀀스
탭을 선택합니다. 작업 공간에는 사용 가능한 배치 시퀀스 목록이 표시됩니다.배치 시퀀스를 다음 방법을 사용하여 복사할 수 있습니다:
복사할 배치시퀀스를 마우스 오른쪽 버튼으로 클릭한 다음 메뉴에서 복사를 선택합니다.
또는 각 행 앞에있는 확인란을 선택하고, 마우스 오른쪽 버튼을 클릭한 다음 메뉴에서 복사를 선택하여 여러개의 배치 시퀀스를 선택할 수 있습니다.
공장 구조에서
, 배치 시퀀스를 붙여 넣을 컨트롤러를 선택합니다. 메뉴 모음에서, 배치 시퀀스
탭을 선택한 다음, 마우스 오른쪽 버튼으로 작업 영역의 아무 곳이나 클릭하고 붙여 넣기를 선택합니다. 새로운 배치는 목록의 첫 번째로 사용할 수 있는 위치에 추가됩니다.
여분의 슬롯이 없는 경우, 배치 시퀀스는 목록의 가장 아래에 추가되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 순서를 재배열하기 위해 인덱스 번호를 변경할 수 없습니다.
배치 시퀀스 내보내기
배치 시퀀스는 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기 및 가져오기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
기존 배치 시퀀스를 내보낼 때, 배치 시퀀스와 관련된 모든 프로그램 및 모드도 내보냅니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
공장 구조
에서, 목록의 컨트롤러를 선택하세요.메뉴 모음에서, 배치 시퀀스
탭을 선택합니다. 작업 영역은 현재 배치 시퀀스의 전체 목록을 표시합니다.내보낼 배치 시퀀스의 확인란을 선택합니다.
관리를 선택한 다음 드롭다운 메뉴에서 내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <BatchSequenceName>.json이며, 내보낸 파일에는 *.json 확장자를 가진 이름을 지정할 수 있습니다. 저장을
선택하세요.
배치 시퀀스 가져오기
배치 시퀀스는 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기 및 가져오기는 동일한 컨트롤러에서 실행하거나 또는 동일한 소프트웨어 버전과 컨트롤러 유형을 실행하는 다른 컨트롤러에서 실행될 경우에만 가능합니다.
기존 배치 시퀀스를 가져올 때, 배치 시퀀스와 관련된 모든 프로그램 및 모드도 가져옵니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
공장 구조
에서, 목록의 컨트롤러를 선택하세요.메뉴 모음에서 배치 시퀀스
탭을 선택하세요. 작업 영역은 현재 배치 시퀀스의 전체 목록을 보여줍니다. 추가 명령 버튼을 선택하신 다음, 가져오기를 선택하세요.
파일 열기를 선택하시고 관련 .json 파일을 검색하세요.
추가를 선택하세요.
여분의 슬롯이 없는 경우, 배치 시퀀스는 목록의 가장 아래에 추가되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 순서를 재배열하기 위해 인덱스 번호를 변경할 수 없습니다.
배치 시퀀스에서 배치 삭제
배치 시퀀스
에서 삭제할 배치의 확인란을 선택합니다. 확인란이 선택되면 관리 명령 버튼 기능이 활성화됩니다.관리 명령어 버튼을 선택한 다음, 드롭다운 목록에서 삭제를 선택합니다. 선택한 배치가 목록에서 제거됩니다.
배치가 배치 시퀀스에서 삭제되면, 인덱스 시퀀스가 압축되고, 갱신되고, 간격을 남기지 않습니다. 삭제된 배치 시퀀스의 인덱스 번호는 생성된 다음 시퀀스에 자동으로 할당됩니다.
소스탭 작업
작업의 선택은 가상 스테이션 구성 작업 영역 내 작업 메뉴에서 이루어집니다.
조임을 위한 작업으로 사용된 외부 신호는 소스  탭에서 구성됩니다. 소스는 가상 스테이션에 연결된 부속품 또는 유사한 것입니다. 두 종류의 소스 작업을 사용할 수 있습니다.
탭에서 구성됩니다. 소스는 가상 스테이션에 연결된 부속품 또는 유사한 것입니다. 두 종류의 소스 작업을 사용할 수 있습니다.
소스 조임 작업
소스 배치 작업
소스 조임은 단일 동기화 모드를 선택하는 데 사용됩니다.
소스 배치는 일련의 동기화 모드인 배치 시퀀스를 선택하는 데 사용됩니다.
소스 조임 개요
조임 메뉴에 소스 배치 구성 목록 및 소스 조임 구성 목록이 있습니다. 문제가 되는 가상 스테이션으로 이동해 작업 속성에서 선택을 선택하면 개별 목록을 가상 스테이션으로 연결할 수 있습니다. 그 후, 소스를 작업으로 선택할 수 있습니다. 소스 조임은 특정 조임 프로그램을 식별자 번호와 연결합니다. 식별자 번호가 컨트롤러로 전송되면 다른 신호가 전송될 때까지 연결된 프로그램이 계속 실행됩니다.
매개변수 이름 | 설명 |
|---|---|
이름 | 소스 조임에 지정된 이름입니다. |
설명 | 소스 조임에 대한 설명입니다. |
배치 시퀀스 완료 시 공구 잠금 | 켜짐: 배치 시퀀스가 완료되면 공구는 잠깁니다. 꺼짐: 배치 시퀀스가 완료되면 공구는 잠금 해제된 상태로 남아있습니다. |
NOK 시 증분 | 켜짐: NOK 조임이 수행되더라도 배치가 진행됩니다. 꺼짐: 성공적인 조임이 수행되는 경우에만 배치가 진행됩니다. |
프로그램 당 최대 연속 NOK |
|
최대 연속 NOK | 허용되는 연속 NOK 결과 수를 지정합니다. 값을 0으로 설정한 다음, NOK 조임에 대한 확인이 실행되지 않습니다. 최대 연속 NOK에 도달했을 때, 컨트롤러는 공구를 잠그고 소스 조임 실행이 정지됩니다. |
배치 제어 | 소스 조임을 실행하는 방법을 선택합니다.
|
명령 | 설명 |
|---|---|
추가 | 가장 낮은 식별자를 이용할 수 있는 새로운 행을 추가합니다. |
삭제 | 목록으로부터 선택된 동기화 모드를 제거합니다. 해당 확인란을 선택하여 동기화 모드를 선택합니다. |
소스 조임 생성
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.소스
탭으로 이동합니다.추가를 선택하면, 새로운 소스 구성 만들기 대화 창이 열립니다. 드롭다운 메뉴에서 조임을 선택하고 추가를 선택합니다.
소스 조임에 이름을 지정합니다.
허용되는 최대 연속 NOK 결과 수를 지정합니다. 값을 0으로 설정한 다음, NOK 조임에 대한 확인이 실행되지 않습니다. 최대 연속 NOK에 도달했을 때, 컨트롤러는 공구를 잠그고 소스 조임 실행이 정지됩니다.
드롭 다운 메뉴에서 사용할 배치 제어을 선택합니다.
내부 배치 제어: 소스 조임을 반복 횟수를 구성합니다.
외부 배치 제어: 오픈 프로토콜 또는 필드버스를 사용하여 소스 조임 실행 횟수를 구성합니다. 모든 구성 변경은 청결하고 알려진 상태에서 시작하기 위해 소스 조임을 지웁니다(배치 카운트 0으로 재설정됨). 진행 중 조임은 변경 사항을 적용하기 전에 완료할 수 있습니다.
기본적으로, 한 편집 가능 식별자 번호만 새 소스 조임을 생성할 때 이용 가능합니다. 추가를 선택하여 더 추가합니다.
모든 항목에 식별자 번호 부여
모드를 선택하고 목록에서 선택하여 각 식별자 번호로 연결할 조임 프로그램을 선택합니다.
소스 배치 생성
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.소스
탭으로 이동합니다.추가를 선택하면, 새로운 소스 구성 만들기 대화 창이 열립니다. 드롭다운 메뉴에서 배치를 선택한 다음, 추가를 선택합니다.
소스 배치에 이름을 지정합니다.
새 식별자 문자열 스캔 중 기존에 스캔한 문자열을 삭제해야 할 경우 새로운 식별자에서 중단을 예로 설정합니다.
식별자 방법(텍스트용 문자열 또는 숫자 문자열용 숫자)을 선택합니다.
문자열을 임의의 순서로 스캔할 수 있으면 경우에 자유 순서를 예로 설정합니다.
식별자 문자열은 최대 4개의 다른 문자열로 구성할 수 있습니다. 자유 순사가 아니요로 설정된 경우, 문자열을 시스템이 인식하려면 문자열이 특정 순서로 스캔되어야 합니다.
자유 순서가 켜짐으로 설정되고, 다른 문자열의 길이가 복제되는 경우 오류가 발생할 수 있습니다. 스캔 순서는 그 다음에 조임 프로그램을 활성화하지 않습니다. 이 오류를 해결하려면 자유 순서를 꺼짐으로 설정하거나 문자열 길이를 조정합니다.
문자열 이름을 지정하고 문자열의 길이를 입력합니다. (문자열 연결에 대한 자세한 내용은, 사용 설명서의 관련 정보를 참조하십시오.)
주요 위치 - 문자열의 관련 위치. (문자열 연결에 대한 자세한 내용은, 사용 설명서의 관련 정보를 참조하십시오.)
저장된 위치 - 시스템에 기록되는 위치. (저장된 위치에 대한 자세한 내용은, 사용 설명서의 관련 정보를 참조하십시오.)
어떤 문자열(문자열의 열)이 어떤 배치 시퀀스에 연결되어야 하는지 (활성화 열에서) 표시합니다. 문자열을 더 추가하려면 추가를 클릭합니다.
"문자열이 포함함"을 입력할 때 와일드카드를 사용할 수 있습니다. 와일드카드는 문자열에서 어느 위치에서든 사용할 수 있습니다. 모호한 매칭 결과에서는 배치 시퀀스가 활성화되지 않습니다.
와일드카드는 . (마침표)
새로운 식별자에서 중단은 배치 시퀀스가 활성화되었고 진행 중일 때 둘째 신호를 해석하는 방법을 제어합니다.
식별자 번호가 배치 시퀀스 구성 에 사용되는 경우, 입력 신호 또는 소켓 선택기는 배치 시퀀스 내의 배치를 선택하는 데 사용될 수 있습니다.
식별자 번호 또는 식별자 문자열에 기반해서 배치 시퀀스를 선택하도록 컨트롤러를 구성할 수 있습니다.
주요 위치
주요 위치는 사전 정의된 문자열과 일치하도록 문자열을 배치할 때 바코드 문자열에서 어떤 문자를 읽어야 하는지 지정하는 데 사용됩니다. 주요 위치의 수는 사전 정의된 문자열의 문자 수와 일치해야 합니다.
주요 위치를 구성해 바코드 문자열 읽기
바코드 문자열의 위치는 1과 1024 사이의 숫자와 관련이 있습니다. 문자열 최초의 위치는 1이며, 마지막은 1024입니다.
설명 | 주요 위치 | 유효 구성 | 사전 정의된 문자열과 일치하는 바코드 문자열 |
|---|---|---|---|
순차로 된 주요 위치 | 1,2,3,7,8 | Ok | ABCGH |
선택적 순서로 된 주요 위치 | 7,1,2,3,8 | Ok | GABCH |
수의 범위 | 1–3,7-8 | Ok | ABCGH |
식별자 문자열 조합
매칭을 위해 사용되는 식별자 문자열은 팩토리 관리 시스템으로부터 최대 네 개의 문자열의 조합이거나 또는 하나의 문자열로 구성되어야 하는 최대 네 개의 스캐너 입력 조합입니다.
추가 및 삭제 명령 버튼은 얼마나 많은 문자열이 결합되었는지를 관리합니다. 다음과 같은 매개변수를 사용할 수 있습니다.
매개변수 | 설명 |
|---|---|
확인란 | 삭제해야 하는 경우 입력을 선택합니다. |
이름 | 문자열에는 이름이 제공되어야 합니다. |
길이 | 문자열 길이를 알아야 하고 입력해야 합니다. 이는 정확한 문자열 식별자를 조합하는 데 중요합니다. |
주요 위치 | 매칭에 사용되는 결합된 문자열에서 쉼표로 구분되는 위치 또는 범위(하이픈으로 구분). |
저장된 위치 | 결과에 저장될 문자열의 쉼표로 구분되는 위치 또는 범위. |
두 개 이상의 식별자 문자열이 사용된 경우 수행할 단계:
추가 명령 버튼을 눌러서 표에 새 입력을 만드세요.
문자열 이름을 생성하세요.
문자열 길이를 입력하세요.
추가되는 모든 문자열에 1-3단계를 반복해 주세요. 최대 4개의 문자열을 조합할 수 있습니다.
각 행에서 시작-끝 매개변수는 매칭 프로세스의 다음 단계에서 사용되는 결합된 문자열 식별자에서 개별적인 문자열 위치를 정의합니다.
입력으로 식별자 문자열을 사용해서 작업 선택 프로세스에서 첫 번째 부분은 문자열의 어떤 위치가 활성화되어야 할지를 규정합니다.
식별자 문자열에서 어떤 위치가 매칭에 사용될지 규정하기 위해 주요 위치를 입력하세요. 위치들은 쉼표, 또는 범위로 구분되어야 합니다.
저장된 위치
저장된 위치는 사용자가 소스 배치에서 사용된 각 문자열 중 어떤 부분을 저장할지, 그리고 어떻게 기록에 나타낼지 표시할 수 있는 필드입니다. 이 필드에서 저장해야 하는 문자열의 위치를 나타내십시오. 위치는 전체 문자열의 일부만을 구성할 수 있습니다. 필드가 빈 칸으로 남아있을 경우, 전체(연결된) 문자열이 저장됩니다. 아래 표는 저장된 위치 조합의 일부 예시를 보여줍니다.
저장된 위치값은 쉼표로 구분되며(띄어쓰기 없음), 범위는 하이픈을 사용해 나타냅니다.
식별자 문자열 | 위치 |
|---|---|
문자열 1: 1234567 | 1-7 |
문자열 2: abcdef | 8-13 |
문자열 3: GHIJKL | 14-19 |
문자열 4: 890 | 20-22 |
저장된 위치 | 저장된 결과 |
|---|---|
(비어 있음) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21는 다음으로 자동 변경됨: 1-12,19-21 | 1234567abcdeL89 |
소스 배치 또는 소스 조임 복사 및 붙여넣기
기존 소스 배치 또는 소스 조임은 복사하여 동일한 컨트롤러에 붙여 넣거나 한 컨트롤러에서 복사한 다음 다른 컨트롤러에 붙여 넣을 수 있습니다.
복사 및 붙여 넣기는 동일한 컨트롤러에서 실행하거나 동일한 유형의 다른 컨트롤러에서 동일한 소프트웨어 버전을 실행하는 경우에만 가능합니다.
기존 소스 배치 또는 소스 조임을 복사하면 조임 또는 배치 순서와 관련된 모든 프로그램 및 모드도 복사됩니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
메뉴 모음에서 소스
탭을 선택하세요. 작업 영역에는 사용 가능한 소스 배치 및 소스 조임 목록이 표시됩니다.다음 중 하나를 수행하여 소스 배치 또는 소스 조임을 복사하세요.
복사할 소스 배치 도는 소스 조임을 마우스 오른쪽 버튼으로 클릭한 다음 메뉴에서 복사를 선택하세요.
또는 각 행 앞에있는 확인란을 선택하고, 마우스 오른쪽 버튼을 클릭한 다음 메뉴에서 복사를 선택하여 여러개의 소스 배치 또는 소스 조임을 선택할 수 있습니다.
공장 구조에서
, 소스를 붙여 넣을 컨트롤러를 선택하세요. 메뉴 모음에서, 소스
탭을 선택한 다음, 마우스 오른쪽 버튼으로 작업 영역의 아무 곳이나 클릭하시고 붙여 넣기를 선택하세요.
소스 배치 또는 소스 조임은 시퀀스 목록에서 첫 번째 자유 위치로 생성됩니다. 여분의 슬롯이 없는 경우, 목록의 가장 아래에 배치되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 인덱스 번호는 변경할 수 없습니다.
소스 배치 또는 소스 조임 내보내기
소스 배치 또는 소스 조임은 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기와 가져오기는 동일한 컨트롤러에서 실행하거나 동일한 유형의 다른 컨트롤러에서 동일한 소프트웨어 버전을 실행하는 경우에만 가능합니다.
기존 소스 배치 또는 소스 조임을 내보내면 조임 또는 배치 순서와 관련된 모든 프로그램 및 모드도 내보내기 됩니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
공장 구조
에서, 목록의 컨트롤러를 선택하세요.메뉴 모음에서 소스 탭
을 선택하세요. 작업 영역에는 모든 현재 소스 배치 및 소스 조임 목록이 표시됩니다.내보낼 소스 배치 또는 조임의 확인란을 선택하세요.
관리를 선택한 다음 드롭다운 메뉴에서 내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <소스배치>.json 또는 <소스조임>.json, 내보낸 파일에는 *.json 확장자를 가진 이름을 지정할 수 있습니다. 저장을
선택하세요.
소스 배치 또는 소스 조임 가져오기
소스 배치 또는 소스 조임은 한 컨트롤러에서 내보내어 다른 컨트롤러로 가져올 수 있습니다.
내보내기와 가져오기는 동일한 컨트롤러에서 실행하거나 동일한 유형의 다른 컨트롤러에서 동일한 소프트웨어 버전을 실행하는 경우에만 가능합니다.
기존 소스 배치 또는 소스 조임을 가져오면 조임 또는 배치 순서와 관련된 모든 프로그램 및 모드도 가져옵니다. 이러한 구성은 단지 복사본이며, 요구 사항에 따라 변경할 수 있습니다.
공장 구조
에서, 목록의 컨트롤러를 선택하세요.메뉴 모음에서 소스 탭
을 선택하세요. 작업 영역에는 모든 현재 소스 배치 및 소스 조임 목록이 표시됩니다.추가 명령 버튼을 선택한 다음, 가져오기를 선택합니다.
파일 열기를 선택하고 관련 .json 파일을 검색합니다.
추가를 선택합니다.
소스 배치 또는 소스 조임은 시퀀스 목록에서 첫 번째 자유 위치로 생성됩니다. 여분의 슬롯이 없는 경우, 목록의 가장 아래에 배치되고, 가능한 가장 낮은 인덱스 번호가 부여됩니다. 인덱스 번호는 변경할 수 없습니다.
구성탭 작업
스캐너, 스택라이트, 공구는 I/O 버스를 통해 컨트롤러에 연결되는 장치 유형의 예입니다. 복수의 장치는 I/O 버스에 연결될 수 있고, 각 유형의 장치는 구성 매개변수를 자체적으로 가지고 있습니다. 작동하기 전에 구성은 가상 스테이션에 할당해야 합니다.
기존 구성 보기
공장 구조
에서 컨트롤러를 선택합니다. 메뉴 모음에서 구성탭
 아이콘을 클릭합니다.
아이콘을 클릭합니다.작업 영역에서 현재의 모든 구성 목록을 보여줍니다.
작업 영역 목록의 행을 더블 클릭하면 선택한 구성의 세부 사항을 볼 수 있습니다.
작업 영역은 선택된 장치를 구성할 수 있는 메뉴 구성을 표시합니다.
구성 개요 목록 열
설명
확인란
관리 명령 단추 목록에 액세스하려면 선택합니다.
이름
컨트롤러 템플릿의 이름을 표시합니다.
유형
구성 설정 유형.
라이브러리 링크
구성에 대한 라이브러리 링크가 있는 경우 예
마지막 변경
최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다.
변경자:
마지막 변경자 이름: <사용자>
컨트롤러 업데이트됨
최종 변경으로서 컨트롤러 시간으로 표현됩니다.
컨트롤러를 업데이트한 사용자
컨트롤러 최종 갱신자: <사용자>
이 목록은 각 열의 헤더를 클릭하여 정렬할 수 있습니다.
구성 추가
구성
에서, 추가를 선택합니다. 새 구성 생성 대화 창이 열립니다.드롭다운 목록에서 장치 유형을 선택한 다음, 추가를 선택합니다.
속성 메뉴에서 구성 이름과 설명을 입력합니다.
선택된 장치의 유형에 따라 각 구성은 자체적 입력 및 출력 신호를 갖습니다. 각 유형의 장치 구성 방법은 별도로 설명됩니다.
구성 가져오기
구성
에서, 추가를 선택합니다. 새 구성 생성 대화 창이 열립니다.가져오기 탭을 선택합니다.
파일 열기를 선택합니다.
가져오기 파일을 읽기 위해 브라우저 창이 열립니다.
원하는 가져오기 파일을 선택합니다. 이 파일은 <configuration_name>.json 형식이어야 합니다. 열기를 선택합니다.
대화 창에서 추가를 선택합니다.
구성 삭제
구성
에서 삭제할 구성의 확인란을 선택합니다. 확인란이 선택되면 관리 명령 버튼 기능이 활성화됩니다.관리를 선택한 다음 드롭다운 메뉴에서 삭제를 선택합니다.
선택한 구성이 목록에서 제거됩니다.
구성은 가상 스테이션에 할당되지 않은 경우에만 삭제할 수 있습니다.
구성 형식
내부 I/O
컨트롤러는 내부에 두 나사 터미널이 있습니다. 이것은 디지털 입력 및 출력 신호를 연결하는 데 사용할 수 있습니다.
참조 섹션에 열거된 모든 디지털 입력 신호와 디지털 출력 신호는 내부 I/O 터미널에 연결할 수 있습니다.
전기 규격 및 연결과 관련된 내용은 6000 컨트롤러 문서를 참조하십시오.
가상 스테이션에 부속품 구성을 할당하는 방법은 가상 스테이션 절에 설명되어 있습니다.
I/O 확장기
I/O 확장기는 I/O 버스에 연결되고 디지털 입력 및 출력 신호를 연결하는 확장 기능을 제공합니다. 여러 확장기를 연결할 수 있습니다. 주소 구성 및 연결 규격은 I/O 확장기 설명서를 참조합니다.
가상 스테이션에 부속품 구성을 할당하는 방법은 가상 스테이션 절에 설명되어 있습니다.
작업자 패널
작업자 패널은 I/O 버스에 연결되어 작업자와 컨트롤러 사이에 구성 가능한 디지털 통신 링크를 제공합니다. 램프, 단추, 버저, 스위치는 통신에 사용됩니다. 주소 구성 및 연결 규격은 조작 패널 설명서를 참조합니다.
가상 스테이션에 부속품 구성을 할당하는 방법은 가상 스테이션 절에 설명되어 있습니다.
스택라이트
스택라이트는 컨트롤러와 작업자 간에 원거리 화상 통신을 제공합니다. 조명 외에도 이 부속품은 단추, 키 스위치, 버저 및 I/O 연결을 장착할 수 있습니다.
스택라이트는 I/O 버스를 사용하는 컨트롤러에 연결됩니다. 여러 부속품이 I/O 버스에 연결될 수 있습니다. 주소 구성 및 연결 규격은 스택라이트 문서를 참조합니다.
가상 스테이션에 부속품 구성을 할당하는 방법은 가상 스테이션 아이콘 아래에 설명되어 있습니다.
지표상자
지표상자는 컨트롤러에서 상태 신호를 표시할 때 사용되는 유연한 디스플레이 표시기입니다. 디스플레이에는 20개의 듀얼 칼라 LED가 장착되어 있으며, 각 측면에 5개의 LED를 배열하여 사각형에 장착됩니다.
지표상자 구성
구성 메뉴에서
.지표상자를 선택하세요. 추가 버튼을 클릭하여 LED를 추가하세요.
그림에 나온 것 처럼 위치 상자에서 LED 문자를 선택하세요.
적색 및 녹색 LED에 대한 신호를 선택하세요.
LED를 제거하려면 LED를 선택하시고 삭제 버튼을 클릭하면 됩니다.
공구 구성
공구 구성을 사용하면 공구와 관련된 다양한 기능을 활성화하고 구성할 수 있습니다. 각 공구 구성은 하드웨어 레이아웃 구성에서 공구에 매핑 될 수 있습니다.
공구 구성 메뉴 보기 또는 편집:
공장 구조 작업 영역
에서 컨트롤러를 선택하세요. 메뉴 모음에서 구성
를 클릭하세요.작업 영역은 현재 부속품 구성을 표시합니다.
새 구성을 추가하거나 공구 구성 유형을 두 번 클릭하세요.
필요한 구성을 수행합니다. 매개변수는 각 섹션에 설명되어 있습니다.
공구 구성의 메뉴:
메뉴 | 설명 |
|---|---|
속성 | 구성 이름, 설명, 공구 유형 필터. |
일반 | 공구에 대한 일반 매개변수. |
듀얼 변환기 | 듀얼 변환기 기능 |
속성
공구 구성은 고유한 이름을 부여 받아야 합니다. 옵션 설명 필드도 사용할 수 있습니다.
부속품 구성 목록은 알파벳 순서로 모든 구성을 표시함
공구 구성 메뉴 보기 또는 편집:
공장 구조 작업 영역
에서 컨트롤러를 선택하세요.메뉴 모음에서 구성
아이콘을 선택하세요.작업 영역은 현재 부속품 구성의 전체 목록을 보여줍니다.
선택한 공구 구성의 이름을 두 번 클릭하세요.
작업 영역은 현재 구성의 세부를 표시하고, 각 항목에 대하여 다른 메뉴로 분할됩니다.
구성 이름과 설명을 속성 메뉴에 설명을 입력하세요.
공구 유형별 필터 드롭 다운 메뉴에서 구성 요소 유형을 선택하세요.
공구 수가 증가함에 따라 메뉴의 수도 증가할 것입니다. 작업 영역에서 시각적 편안함을 높이기 위해 이 메뉴를 필터링하고 하나의 선택된 공구 유형에만 관련이 있는 것을 표시할 수 있습니다. 필터는 속성 메뉴에서 설정됩니다. 공구 없음을 선택하면, 모든 가능한 공구 구성 매개변수가 표시됩니다.
일반
시작 소스를 사용해 공구 시작 방법을 설정하세요.
소스 시작 | 설명 |
|---|---|
트리거만 | 공구 트리거를 눌러 조임을 시작합니다. |
트리거 또는 푸시 | 공구 트리거를 누르거나 공구를 조인트 쪽으로 밀어서 조임을 시작합니다. |
트리거 및 푸시 | 공구 트리거를 누르고 공구를 조인트 쪽으로 밀어서 조임을 시작합니다. |
푸시만 | 공구를 조인트 쪽으로 밀어서 조임을 시작합니다. |
디지털 입력 | 외부 디지털 입력 신호를 사용하여 조임의 개시를 트리거합니다. |
듀얼 변환기
듀얼 변환기 | 설명 |
|---|---|
주 토크 변환기 | 조임에 사용되는 토크 변환기입니다. |
보조 토크 변환기 | 조임에 사용되는 각도 변환기입니다. |
필요한 듀얼 토크 | 연결된 공구는 조임을 실행하려면 반드시 이중 토크 변환기 (비활성화되지 않음)를 갖추어야 합니다. |
필요한 듀얼 각도 | 연결된 공구가 조임을 실행하려면, 이중 각도 변환기(비활성화되어 있지 않음)를 반드시 갖추어야 합니다. |
추적시 보조 토크 | 보조 토크 변환기의 값이, 추적할 때 포함되어있는 경우의 토크입니다. |
추적시 보조 각도 | 보조 각도 변환기의 값이 추적에 포함되는 경우의 각도입니다. |
이중 토크 제한 사용 | 이중 토크 변환기 제한이 활성화된 경우에 해당됩니다. |
최대 토크 차이 | 이중 토크 차이 제한에 대한 한계 값입니다. |
이중 각도 제한 사용 | 이중 각도 변환기 제한이 활성화된 경우에 해당됩니다. |
최대 각도 차이 | 이중 각도 차이 제한에 대한 한계 값입니다. |
스캐너
스캐너는 부속품이며 USB 케이블을 통해 컨트롤러에 직접 설치할 수 있습니다.
스캐너 구성에서 패스 스루를 켜짐 또는 꺼짐으로 구성할 수 있습니다. 기본 구성은 "꺼짐"입니다. 패스 스루가 활성화되면(켜기로 설정), 스캔한 바코드 정보는 디코딩을 위해 SoftPLC 또는 Fieldbus로 전송됩니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.작업 영역의 탭 메뉴 모음에서 구성 아이콘
을 선택합니다.작업 영역이 구성 목록을 표시합니다.
유형 열에서 스캐너가 있는 구성 행을 더블 클릭합니다.
또는 추가를 클릭하여 새로운 구성을 만듭니다.
파라미터 | 설명 |
|---|---|
이름 | 구성의 선택적 이름 |
설명 | 선택적 구성 설명 |
패스 스루 = 켜짐 | 스캔한 바코드가 디코딩 될 SoftPLC 또는 Fieldbus로 전송됩니다. |
패스 스루 = 꺼짐 | 스캔한 바코드는 컨트롤러에서 디코딩 됩니다. |
스캐너 구성
스캐너는 공구에 설치되고 공구 부속품 버스에 연결되는 공구 부속품입니다. 스캐너는 작은 디스플레이, 두 개의 입력 버튼 및 출력 LED를 갖추고 있습니다.
스캐너 구성에서 패스 스루를 켜짐 또는 꺼짐으로 구성할 수 있습니다. 기본 구성은 "꺼짐"입니다. 패스 스루가 활성화되면, 스캔한 바코드 정보는 디코딩을 위해 SoftPLC 또는 필드버스로 전송됩니다.
스캐너 구성
공장 구조 작업 영역
에서 컨트롤러를 선택하세요.작업 영역의 탭 메뉴 모음에서 구성 아이콘
을 선택하세요.작업 영역이 구성 목록을 표시합니다.
새로운 구성을 만들려면 추가를 클릭하세요.
구성 형식 드롭 다운 메뉴에서 스캐너를 선택하세요.
추가를 선택하세요.
선택한 구성을 확인하세요. 구성은 ToolsTalk 2에 자동으로 저장됩니다.
매개변수 | 설명 |
|---|---|
패스 스루 = 켜짐 | 스캔한 바코드가 디코딩 될 SoftPLC 또는 Fieldbus로 전송됩니다. |
패스 스루 = 꺼짐 | 스캔한 바코드는 컨트롤러에서 디코딩 됩니다. |
가상 스테이션에 부속품 구성을 할당하는 방법은 가상 스테이션 절에 설명되어 있습니다.
일반 가상 스테이션
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.작업 영역의 탭 메뉴 모음에서 구성 아이콘
을 선택합니다.작업 영역이 구성 목록을 표시합니다.
유형 열에서 일반 가상 스테이션이 있는 구성 행을 더블 클릭합니다.
또는 추가를 선택하여 새로운 일반 가상 스테이션 구성을 생성합니다.
매개변수 | 설명 |
|---|---|
이름 | 구성의 선택적 이름 |
설명 | 선택적 구성 설명 |
비조임 결과는 필터링되지 않고 보고되거나(기본값), 결과 일부를 보고하도록 구성할 수 있습니다. 최대 16개의 일반 가상 스테이션 구성을 만들 수 있습니다.
영향을 받는 조임이 아닌 결과:
풀기
배치 증가
배치 감소
배치 재설정
바이패스 조임 프로그램
배치 시퀀스 취소
배치 시퀀스 재설정
StepSync 또는 Flex 컨트롤러를 사용할 경우 일반 가상 스테이션 구성에서도 다음 매개 변수를 볼 수 있습니다.
고정된 스테이션
자동 실행은 다음 설정 중 하나를 사용할 수 있으며, 기본 설정은 전혀 안 함입니다.
설치 | 설명 |
|---|---|
전혀 안 함 | 입력 사용 작동은 조임을 실행할 수 있도록 높음으로 설정되어 있습니다. |
항상 | 입력 사용 작동의 상태에 관계 없이 조임을 항상 실행할 수 있습니다. |
비조임 결과 필터 생성
기본은 “켜짐” 설정임 - 모든 결과가 보고됩니다. “꺼짐"으로 전환하여 결과를 필터링합니다. "켜짐"으로 지정된 필터만 보고됩니다.
보고서 필터와 무관하게 비조임 결과는 항상 컨트롤러와 웹 사용자 인터페이스에 표시됩니다.
일반 가상 스테이션 구성을 적용하려면, 가상 스테이션 섹션에서 가상 스테이션에 할당합니다.
지정되지 않은 일반 가상 스테이션 구성만 삭제될 수 있습니다.
조임 설정 활성화 및 비활성화
일반 가상 스테이션 구성은 조임 섹션을 포함하며, 이는 조임 비활성화 및 풀기 비활성화 매개변수 설정에 사용됩니다.
공장 구조
에서 컨트롤러를 선택합니다. 메뉴 모음에서 구성탭
으로 이동합니다.작업 영역은 사용 가능한 구성을 표시합니다.
기존 일반 가상 스테이션을을 더블 클릭하여 구성하거나 추가를 선택하여 새 구성을 생성할 수 있습니다.
아래의 테이블의 정보에 따라 조임 설정 매개변수에서 관련된 항목을 선택합니다.
매개변수 값 | 설명 |
|---|---|
꺼짐 | 비활성화된 공구는 풀기 상태에 관계없이 비활성 상태로 유지됩니다. |
OK 시 | OK 풀기가 수행된 후 비활성화된 공구는 잠금이 해제됩니다. |
항상 | 풀기 상태에 관계없이, 풀기가 수행되는 즉시 비활성화된 공구는 잠금이 해제됩니다. |
풀기 비활성화 | 설명 |
|---|---|
꺼짐 | 풀기 비활성화가 꺼져 있습니다. 작업자는 언제든지 나사를 풀 수 있습니다. |
OK 조임 시 | OK 조임에 대한 풀기를 비활성화합니다. 작업자는 조임 OK로 종료된 나사를 풀 수 없습니다. |
NOK 조임 시 | NOK 조임에 대해 풀기를 비활성화합니다. 작업자는 조임 NOK로 종료된 나사를 풀 수 없습니다. |
항상 | 풀기 비활성화는 항상 켜져 있습니다. 작업자는 절대로 나사를 풀 수 없습니다. |
조임 비활성화 | 설명 |
|---|---|
꺼짐 | 조임 비활성화가 꺼져 있습니다. 작업자는 언제든지 나사를 조일 수 있습니다. |
OK 조임 시 | OK 조임 후 조임을 비활성화합니다. 현재 조임이 OK로 종료되면 작업자는 다른 나사를 조일 수 없습니다. |
NOK 조임 시 | NOK 조임 후 조임을 비활성화합니다. 현재 조임이 NOK로 종료되면 작업자는 다른 나사를 조일 수 없습니다. |
매번 조임 후 | 매 조임 후 활성화된 조임을 비활성화합니다.. 현재 조임 종료 때까지 작업자는 다른 나사를 조일 수 없습니다. |
공구 잠금 동작
공구 잠금 동작은 기본값으로 꺼짐으로 설정됩니다. 이 동작은 풀기를 수행하여 작업자가 공구를 잠금 해제할 수 있도록 중단할 수 있습니다.
풀기 후 비활성화된 공구의 잠금 해제 허용
공구에 의해 사용되는 구성에서(공구가 연결된 가상 스테이션의 설정) 풀기 시 공구 잠금 해제를 켜기 또는 항상으로 설정합니다.
위의 설정을 사용하려면 3가지 조건이 충족되어야 합니다.
1. 풀기 비활성화 매개변수가 반드시 꺼짐 또는 항상으로 설정되어야 합니다.
2. 풀기 비활성화 값은 조임 비활성화 값과 동일한 값으로 설정할 수 없습니다.
3. 사용된 조임 프로그램의 풀기는 반드시 활성화되어 있어야 합니다.
비활성화 상태 때문에 공구가 조임 또는 풀기에 대하여 잠기면 다음 입력 신호로 잠금 해제할 수 있음:
Master_Unlock
Unlock_Tool_On_Disable
이 입력 신호는 부속품, 프로그래머블 공구 부속품 또는 필드버스 유닛에서 컨트롤러로 전송될 수 있습니다.
소켓 선택기
소켓 선택기 구성 보기/편집 또는 만들기
소켓 선택기는 I/O에 연결되어 있으며 조임 절차에 대한 올바른 소켓을 선택하기 위해 작업자를 지원합니다.
공장 구조
에서 컨트롤러를 선택합니다. 구성
으로 이동합니다.작업 영역은 선택한 컨트롤러에 대한 생성된 구성 목록을 표시합니다.
선택한 소켓 선택기 구성의 이름을 더블 클릭하여 구성을 보고 편집할 수 있습니다.
구성
에서, 추가를 선택합니다.새 구성 만들기 팝업 창이 표시됩니다. 드롭다운 목록에서 소켓 선택기를 선택한 다음, 추가를 선택합니다.
메뉴의 속성 영역에서, 구성 이름과 설명을 입력합니다.
소켓 선택기 구성에서 제어 유형을 자동 또는 외부 제어로 지정합니다.
활성화되어야 할 각 소켓 위치에 대하여
확인란을 선택합니다.비활성화되어야 할 각 소켓 위치에 대하여 확인란 선택을 취소합니다.
4개의 소켓 그룹을 추가하거나 제거하려면 추가 또는 삭제를 선택합니다.
최대 32개의 소켓 선택기 위치까지 사용할 수 있습니다.
가상 스테이션에 대한 구성 주소 및 할당에 대한 자세한 정보는 가상 스테이션 섹션에 있습니다.
소켓 선택기 제어 스위치
컨트롤 스위치의 두 위치:
위치 | 설명 |
|---|---|
자동 | 컨트롤러는 적절한 소켓 선택을 위해 작업자를 안내하는 소켓 선택기의 LED 램프를 제어합니다. |
외부 제어 | 컨트롤러는 소켓 선택기를 제어할 수 없습니다. LED 램프의 모든 기능은 오픈 프로토콜 통신 또는 필드버스 모듈을 통해서 외부 컨트롤 시스템에 의해 제어됩니다. |
공구 탭 작업
공구 작업 영역은 컨트롤러에 연결된 공구 목록을 표시합니다. 표시되는 메뉴는 고정식 공구용 컨트롤러와 핸드헬드 공구용 컨트롤러 간에 다르며, 연결된 공구에 대하여 자세한 정보를 제공합니다.
설정 메뉴에서 공구 알람을 설정할 수 있습니다. 이러한 알람을 위한 트리거 포인트는 공구 메뉴에서 가져옵니다.
공구 메뉴 보기:
공장 구조 작업 영역
에서 컨트롤러를 선택하세요.공구
 섹션으로 이동하세요.
섹션으로 이동하세요.컨트롤러에 연결된 공구가 표시됩니다.
열
설명
공구 유형
공구의 유형을 설명합니다.
모델
공구에 대한 상세한 모델 번호.
일련 번호
공구의 일련 번호입니다.
MAC address (MAC 주소)
공구가 MAC 주소를 가지고 있는 경우에만 MAC 주소를 볼 수 있습니다.
소프트웨어 버전
장치의 소프트웨어 버전.
최대 토크
공구가 생성할 수 있는 최대 토크 값.
TurboTight에서의 최대 토크
TurboTight 전략을 사용하는 경우 공구가 생성할 수 있는 최대 토크 값.
특정 공구에만 적용할 수 있습니다.
TensorPulse에서의 최대 토크
TensorPulse 전략을 사용하는 경우 공구가 생성할 수 있는 최대 토크 값.
특정 공구에만 적용할 수 있습니다.
최대 속도
공구의 최대 회전 속도.
다음 교정
공구의 다음 교정 날짜.
가상 스테이션
공구가 연결된 가상 스테이션의 이름.
채널
공구의 채널 번호입니다.
자세한 정보를 보려면 테이블에 있는 공구 중 하나를 두 번 클릭합니다.
공구 연결 방법이나 무선 페어링 방법은 컨트롤러 설명서에 있습니다.
일반 정보
메뉴는 고정식 공구 또는 핸드헬드 공구를 지원하는 컨트롤러에 대하여 유효합니다.
정보 | 설명 |
|---|---|
모델 | 공구 모델 명칭. |
일련 번호 | 공구 일련 번호. |
MAC address (MAC 주소) | 공구가 MAC 주소를 가지고 있는 경우에만 MAC 주소를 볼 수 있습니다. |
제품 번호 | 주문 번호와 동일합니다. |
소프트웨어 버전 | 공구 소프트웨어 버전 번호. |
일반 공구 정보는 공구가 컨트롤러와 ToolsTalk 2에 제공합니다.
한계
메뉴는 고정식 공구 또는 핸드헬드 공구를 지원하는 컨트롤러에 대하여 유효합니다.
정보 | 설명 |
|---|---|
최대 토크 | 조임 시 공구가 사용할 수 있는 최대 토크. |
최대 속도 | 공구의 최대 회전 속도. |
최소 토크 | 조임 시 공구가 사용할 수 있는 최소 토크. |
기어비 | 입력 기어 각속도 대 출력 기어 각속도의 비율. |
공구 한계 정보는 공구가 컨트롤러와ToolsTalk 2에 제공합니다.
연결
컨트롤러와의 연결 및 할당된 가상 스테이션.
서비스 설정
교정
이 메뉴는 공구가 참조 변환기와 얼마나 잘 일치하는지 그리고 차이점을 조정하는 방법을 제어하는 용도로 사용됩니다.
공구 메모리에 저장된 교정 값은 공구의 토크 트랜스듀서에 의해 주어진 토크 값을 조정하여 컨트롤러에 올바른 토크 값을 표시하도록 하는 데 사용됩니다. 컨트롤러는 마지막 교정 날짜를 표시합니다.
공구 교정은 컨트롤러에서 수행하고, 토크 참조 트랜스듀서를 사용합니다. 이 절차는 Power Focus 6000 controller 설명서에 설명되어 있습니다.
계산된 값을 입력하여 공구 메모리에 새 교정 값을 저장한 다음 설정을 클릭하세요.
매개변수 | 설명 |
|---|---|
최종 교정됨 | 최종 교정 날짜. |
교정 값 | 매개변수 입력 상자에 측정 값과 계산 값을 입력합니다. |
다음 교정 | 다음 교정 기한 날짜입니다. |
설정 | 입력된 값을 저장합니다. |
유지관리
공구는 서비스 간격 번호를 저장하고 다음 공구 유지보수 또는 서비스를 해야 하기 전 얼마나 많은 조임이 수행될 수 있는지 계수합니다.
매개변수 | 설명 |
|---|---|
마지막 서비스 | 마지막 서비스가 수행된 날짜 및 시간. 마지막 서비스 날짜는 수리 정비소에 설정됩니다. 마지막 서비스 날짜는 재설정 버튼을 누르면 현재 날짜 및 시간으로 설정됩니다. |
서비스 시 총 조임 횟수 | 서비스 시 총 조임은 처음 사용한 이후 공구에서 수행한 총 조임 횟수입니다. 이 값은 서비스 시 업데이트되고 다음 서비스를 받을 때까지 동일하게 유지됩니다. |
남은 조임 횟수 | 서비스 간격에 도달할 때까지 남은 총 조임 횟수. |
서비스 간격 | 다음 서비스 전에 수행해야 할 조임 횟수. 10000 배수로 설정할 수 있습니다. |
설정 | 서비스 간격 매개변수 입력 필드에 입력한 값을 저장하고 값을 10000의 배수로 조정합니다. |
서비스 카운터/데이터 초기화 | 초기화 명령은 카운터를 초기화하고 현재 날짜로 마지막 서비스 날짜를 설정합니다. |
변환기 정보
한 개의 주 및 보조 토크 변환기와 한 개의 주 및 보조 각도 변환기를 하나의 공구에 장착할 수 있습니다. 개별 변환기(토크 또는 각도)에 대한 정보는 여기에 표시됩니다.
정보 | 설명 |
|---|---|
켜짐 | 변환기가 활성화된 경우를 나타냅니다. |
기어비 | 변환기와 아웃 고잉 샤프트 사이의 기어비입니다. |
와인드업 | 각도 변환기의 와인드업 보상 계수. |
정보 | 설명 |
|---|---|
켜짐 | 변환기가 활성화된 경우를 나타냅니다. |
일련 번호 | 트랜스 듀서의 일련 번호입니다. |
품목 번호 | 문자열로 이루어진 변환기의 품목 번호입니다. |
교정 값 | Nm 단위로 표시되는 변환기의 교정 값입니다. |
상태
메뉴는 환경 모니터 데이터를 제공합니다. 이 장비는 정기적으로 매개변수를 측정하고 저장합니다.
매개변수 | 설명 | 값 |
|---|---|---|
새로 고침 | 명령 버튼: 공구 값을 읽습니다. | |
기록 | 명령 버튼: | |
공구 모터 온도 | 최신 온도 기록은 월/일/년 시간:분:초로 표현합니다. | 온도 C 또는 F |
공구 전자 장치 온도 | 최신 온도 기록은 월/일/년 시간:분:초로 표현합니다. | 온도 C 또는 F |
제로 오프셋 및 션트 한도
공구는 주 토크 변환기와 보조 토크 변환기를 하나씩 갖출 수 있습니다. 각 토크 변환기에 대한 한도가 여기에 표시됩니다.
정보 | 설명 |
|---|---|
션트 한도 | 측정된 최대 허용 션트 교정 값입니다. (%) |
션트 드리프트 한도 | 측정된 션트 교정 값의 최대 허용 변경 값입니다. (%) |
제로 오프셋 한도 | 최대 허용 제로 오프셋 보상 (%) |
제로 오프셋 드리프트 한도 | 제로 오프셋 보상값의 최대 허용 변경값(%) |
가상 스테이션 탭 작업
가상 스테이션 탭 은 컨트롤러가 공장 구조 에서 선택된 경우에 컨트롤러의 메뉴 모음에 위치합니다.
가상 스테이션은 컨트롤러의 소프트웨어 추상화입니다. 한 컨트롤러 내에서 여러 가상 스테이션을 만들 수 있습니다. 각 가상 스테이션은 컨트롤러처럼 작동합니다. 필요에 따라 다양한 구성이 가상 스테이션에 할당될 수 있습니다.
진단 및 가상 스테이션의 설정된 통신 프로토콜 매개변수를 통해 작업을 선택하고, 부속품 구성을 할당하고, 공구를 할당하고, 입출력 신호를 조작할 수 있습니다. 가상 스테이션 아이콘은 FlexController와 Power Focus 6000 controller.전부에 사용할 수 있습니다.
가상 스테이션 개념은 FlexController에 유효하지 않습니다. 소프트웨어 아키텍처 설계 두 컨트롤러 유형에 대해 유지되며, 따라서 가상 스테이션은 FlexController 인터페이스에 나타납니다.
적은 반응 조임 전략 및 컨트롤러 전반의 기능과 같은 컨트롤러 기능들은 기능 관리 시스템(FMS)을 통해 배포된 라이선스가 필요합니다. 특정 라이선스 없이 기능의 구성이 가능하지만, 이러한 기능들을 할당하고 사용하려면 올바른 라이선스를 컨트롤러에 설치해야 합니다. 라이선스에 대한 자세한 내용은 라이선스(FMS)를 참조하십시오.
가상 스테이션 개요
가상 스테이션 작업 영역을 열고 가상 스테이션 목록 보기:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.메뉴 모음에서 가상 스테이션
탭을 선택합니다.작업 영역은 컨트롤러에서 가상 스테이션의 목록을 표시합니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.
열 | 설명 |
|---|---|
확인란 | 가상 스테이션을 선택합니다. |
이름 | 가상 스테이션 이름을 표시합니다. |
변경자: | 변경한 사용자 |
컨트롤러 업데이트됨 | 컨트롤러가 마지막으로 업데이트된 시간 |
컨트롤러를 업데이트한 사용자 | 컨트롤러를 업데이트한 사용자 |
명령 | 설명 |
|---|---|
추가 | 새 가상 스테이션을 생성합니다. |
삭제 | 목록에서 선택한 가상 스테이션을 제거합니다. |
가상 스테이션 구성 메뉴 액세스:
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
표시되는 메뉴:
메뉴 | 설명 |
|---|---|
속성 | 구성에 이름과 설명을 제공합니다. 선택 사항. |
프로토콜 | 외부 통신 프로토콜 활성화 및 구성. |
공구 | 가상 스테이션에 공구를 할당합니다. |
공구 구성 | 가상 스테이션에 공구 구성을 할당합니다. |
필드버스 매핑 | 필드버스 매핑이 구성되고 컨트롤러에 할당되어 있다면 이를 표시합니다. 이 필드는 정보만을 위한 것입니다. 실제 필드버스 매핑 및 구성은 필드버스 및 SoftPLC |
작업 | 가상 스테이션에 작업을 할당하거나 소스 신호가 수행할 작업을 선택하는 방법을 구성합니다. |
부속품 | 부속품 구성 및 주소를 부속품에 할당하고 가상 스테이션에 조합을 할당합니다. |
일반 | 일반 가상 스테이션을 할당할 때 사용됩니다. |
수동 모드 | 수동 모드 기능을 구성할 때 사용됩니다. |
라이선스 | 가상 스테이션에 라이선스 및 기능을 할당 및 제거할 때 사용됩니다. |
FlexController의 경우, 속성, 필드버스 매핑, 작업 메뉴를 사용할 수 있습니다.
가상 스테이션 - 속성
가상 스테이션은 이름이 있어야 합니다. 이것은 속성 메뉴에서 구성됩니다. 기본 이름은 가상 스테이션 <index nr>입니다. 옵션 설명 필드도 사용할 수 있습니다.
이름 필드가 비어 있으면 적색 오류 표시기가 표시됩니다  .
.
작업을 가상 스테이션에 할당하기
가상 스테이션 창의 작업 메뉴는 작업 선택을 제어합니다.
작업 메뉴는 가상 스테이션에 작업을 할당하는 데 사용됩니다.
기능 | 설명 |
|---|---|
이름 | 현재 가상 스테이션에 할당된 작업. |
할당되지 않음 | 명령 버튼 가상 스테이션에서 작업을 선택 해제합니다. |
선택 | 명령 버튼 작업을 수동으로 변경하거나 외부 소스를 구성하여 작업을 선택하세요. 작업 선택 팝업 창이 작업 선택을 구성하기 위해 열립니다. |
변경 | 명령 버튼 작업이 이미 선택된 경우, 선택 명령 버튼은 변경으로 대체됩니다. 새로운 작업을 만들기 위해 변경을 선택하세요. |
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
작업 메뉴에서 선택을 클릭하세요.
작업 선택 팝업 창이 나타납니다.
소스 또는 배치 시퀀스 탭에서 원하는 작업을 선택하세요.
선택을 클릭하세요. 작업 선택 팝업 창이 닫힙니다.
닫기 버튼은 변경 사항을 적용하지 않고 팝업 창을 닫습니다.
푸시 기능을 통해 컨트롤러를 업데이트할 수 있습니다.
이름 필드는 작업 메뉴에서 업데이트됩니다.
작업을 선택하는 소스 및 식별자 번호 및 작업을 선택하는 식별자 문자열은 소스 구성 문서에서 상세하게 설명합니다.
가상 스테이션 - 프로토콜
프로토콜 메뉴는 하나 이상의 구현된 통신 프로토콜과 매개변수 설정을 포함할 수 있습니다. 프로토콜의 사용 가능 여부는 IAM 라이선스에 따라 달라집니다.
고객 특정 통신 프로토콜은 프로토콜 메뉴에서 구성되어 있습니다.
오픈 프로토콜
오픈 프로토콜 구성
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
프로토콜 메뉴에서 구성 메뉴를 클릭합니다.
가상 스테이션 오픈 프로토콜 구성 스위치는 사용자가 가상 스테이션과 공장 제어 장치의 일부인 인티그레이터와 오픈 프로토콜 통신을 활성화하거나 비활성화할 수 있게 해줍니다.
켜짐 또는 꺼짐을 선택하여 스위치로 오픈 프로토콜 통신을 활성화하거나 비활성화합니다.
오픈 프로토콜은 구성 또는 조임 결과를 제공하는 데 사용되는 컨트롤러와 같은 공장 이더넷 연결을 사용합니다.
각 가상 스테이션은 고유 포트 번호로 식별됩니다. 오픈 프로토콜을 사용하는 각 가상 스테이션의 경우, 포트 필드에서 포트 번호를 입력해야 합니다.
기본 카운터 설정은 시퀀스의 모든 조임을 계수하여 보조 시스템에 해당 숫자를 출력합니다. 이 설정을 사용하려면, 기존 카운터 사용을 예로 설정하십시오.
SoftPLC 인덱스는 공유 메모리에서 개방형 프로토콜 명령을 작성할 위치를 매핑하는 작업에 사용됩니다. 기본 값은 1이며, 1부터 6까지의 값을 입력할 수 있습니다.
SoftPLC Index 의 기본값은 항상 1이고 사용 중인지 확인하기 위한 검사가 수행되지 않으므로, 가상 스테이션을 추가할 때 동일한 인덱스가 여러 번 구성되도록 시스템을 구성했을 가능성이 있습니다. 이러한 경우 소프트 PLC는 어떤 가상 스테이션에서 MID가 들어오는지 식별할 수 없습니다.
가상 스테이션에서 필드버스 매핑하기
컨트롤러는 한 필드버스 통신 모듈이 설치되어 있을 수 있습니다. 이 통신 모듈은 모든 가상 스테이션에 적용됩니다. 필드버스 매핑 메뉴는 컨트롤러에 대응하는 필드버스 구성을 표시합니다. 필드버스가 구성되고 구성이 Fieldbus 및 SoftPLC 에 할당되고 매핑됩니다.
필드버스 진단
필드버스 매핑 진단 기능 액세스:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다. 가상 스테이션
으로 이동합니다.작업 영역은 컨트롤러에서 가상 스테이션의 목록을 표시합니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.
가상 스테이션 이름을 더블 클릭하여 기존 구성을 열거나 추가를 선택하여 새 가상 스테이션 구성을 생성합니다.
작업 영역 매핑 필드버스를 포함하는 메뉴를 보여줍니다.
필드버스 진단 기능을 이용하기 위해 진단 단추를 클릭합니다.
필드버스 진단 기능은 필드버스로부터 송수신한 신호에 대하여 수신 및 발신 신호를 모니터링하는 기능을 제공합니다. 강제 모드를 통한 정보 조작 및 구성 그리고 프레임 전송이 가능합니다. 필드버스 진단 기능 사용 액세스:
컨트롤러 GUI
웹 GUI
ToolsTalk
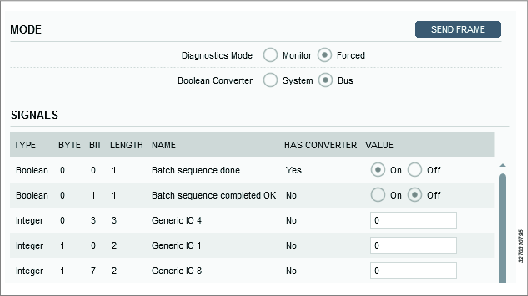
진단 모드 | 모니터 모드 또는 강제 모드를 활성화합니다. 모니터 모드: 모니터링 모드에서, 필드버스에서 수신하고 발신한 신호에 대한 수신 및 발신 신호의 모든 구성 필드 상태를 확인할 수 있습니다. 수신된 프레임의 비트 중 어느 하나라도 변화가 있을 때마다 보기가 업데이트됩니다. 강제 모드: 강제 모드로 들어갈 때, 데이터가 현재 상태로 고정되며, 프레임이 고정됩니다. 강제 모드에서 수동으로 신호를 활성화하거나 비활성화할 수 있고, 값을 입력하고, 한 개 이상의 신호에 이를 강제 적용할 수 있습니다. 수신 프레임, 발신 프레임, 또는 두 가지 모두 가능합니다. |
불리언(Boolean) 변환기 | 시스템 보기 및 버스 보기 사이를 전환합니다. 변환기는 필드버스로부터 발신하거나 수신한 신호를 반전시킬 수 있습니다. |
유형 | 신호의 종류. |
바이트 | 프레임에서의 위치. |
비트 | 프레임에서의 위치. |
길이 | 신호 프레임의 길이. |
이름 | 신호의 이름. |
변환기 있음 | 변환기가 구성되어 있다면 변환기 있음은 예입니다. 예인 경우, 변환기는 신호 반전에 사용할 수 있습니다. 아니요인 경우, 변환기는 적용되지 않습니다. |
값 | 값 열은 신호와 값 목록을 나타냅니다. 수신 및 발신 프레임에서 각 신호의 값 형식은 유형에 따라 부울, 정수 또는 문자열입니다. 값은 강제 모드에서 편집할 수 있습니다. 동일한 프레임에서 신호 한 개, 몇 개 또는 전부를 변환할 수 있습니다. 값 변경 후 새로운 프레임을 컨트롤러에 푸시하고 새 값이 적용될 수 있도록 프레임 보내기 단추를 클릭합니다. 진단 모드를 떠날 때, 모든 값은 수신 및 발신 신호의 마지막 저장된 프레임의 값으로 돌아갑니다. |
한 진단 세션만 활성화될 수 있습니다. 진단이 이미 사용 중인 경우 정보 메시지가 화면에 표시됩니다.
부속품을 가상 스테이션에 할당하기
이 메뉴는 핸드헬드 공구를 지원하는 컨트롤러에만 유효합니다.
컨트롤러는 CAN 버스를 통해 연결된 여러 부속품이 있을 수 있습니다. 각 부속품은 버스의 1~15 범위 내에서 고유한 주소가 있어야 합니다. 가상 스테이션에 여러 부속품을 할당할 수 있습니다.
가상 스테이션에 부속품을 할당하기 전에 부속품은 부속품 구성이 할당되어 있어야 합니다.
가상 스테이션의 현재 부속품 할당 보기:
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
기능 | 설명 |
|---|---|
확인란 | 가상 스테이션에서 할당할 수 있는 부속품 구성을 선택합니다. |
이름 | 부속품에 할당된 구성의 이름입니다. |
유형 | 부속품 유형. |
CAN 노드 | 부속품의 CAN 주소. |
일련 번호 | 부속품의 일련 번호. |
Status (상태) | 가능 상태:
|
CAN 노드 열은 새로운 부속품이 연결되어 있는 경우에 이용할 수 없는 사용된 주소를 나타냅니다. 소켓 선택기에 대한 할당은 여러 주소를 포함할 수 있습니다.
소켓 선택기의 경우 CAN 노드의 순서는 중요합니다. 첫 번째 소켓 선택기에서 가장 낮은 위치는 할당의 첫 번째 위치입니다.
기능 | 설명 |
|---|---|
할당되지 않음 | 선택한 부속품은 가상 스테이션에서 할당 취소됩니다. 부속품은 컨트롤러에 연결된 상태로 유지됩니다. |
선택 | 새로운 부속품을 추가합니다. 부속품 팝업 창이 열립니다. |
진단 | I/O 신호 동작 모니터링 및 컨트롤러 내부 로직 및 부속품 사이에서 원하는 상태로 신호를 강제합니다. |
가상 스테이션에 부속품 추가
선택한 부속품은 고유하고 유효한 CAN 버스 주소가 있어야 합니다. 부속품 구성은 부속품에 할당되고 공구는 가상 스테이션에 할당됩니다.
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
가상 스테이션 공구 할당:
부속품 메뉴에서 선택 단추를 클릭하여 부속품 팝업 창을 엽니다.
탭 중에서 부속품 유형을 선택합니다.
내부 I/O
소켓 선택기
I/O 확장기
작업자 패널
스택라이트
스캐너
지표상자
- 에 표시하여 구성 목록에서 구성을 선택합니다.
가능한 경우,
에 표시하여 사용가능한 CAN 노드 목록에서 주소를 선택합니다.선택 버튼을 클릭하고 부속품 옵션 중 하나를 추가합니다.
가상 스테이션에 할당할 각 부속품에 대하여 절차를 반복합니다.
팝업 창을 닫으려면 취소 단추를 클릭합니다.
부속품 메뉴가 업데이트되며 새로 할당된 구성을 보여줍니다.
부속품 주소는 부속품의 로터리 스위치로 설정됩니다. 부속품에 대한 자세한 제품 정보 문서를 참조합니다. 부속품 주소 범위는 1과 15 사이입니다.
가상 스테이션에서 라이선스 할당 취소
부속품 구성을 할당 해제하고 가상 스테이션에 대한 연결을 제거하려면, 다음 단계를 수행하십시오.
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
부속품 메뉴에서, 할당을 해제할 부속품 구성의 확인란을 표시하십시오.
부속품 메뉴에서 할당 해제 명령 버튼을 선택합니다.
변경된 내용으로 컨트롤러를 업데이트하려면, 푸시 변경 명령 버튼
을 선택합니다.
부속품 메뉴의 목록이 업데이트됩니다.
일반 가상 스테이션 구성 할당하기
가상 스테이션 구성으로 이동
공장 구조 작업 영역 에서 컨트롤러
를 선택합니다. 가상 스테이션 탭
을 선택합니다.
가상 스테이션 개요는 선택된 컨트롤러에 대하여 가상 스테이션 목록을 나타냅니다. 가상 스테이션이 생성되지 않은 경우 목록이 비어 있습니다.가상 스테이션을 더블 클릭하여 기존 구성을 열거나, 새 가상 스테이션 구성을 생성하기 위해 추가를 클릭하여 합니다.
가상 스테이션에 일반 구성을 할당하려면 다음과 같이 하십시오.
가상 스테이션 구성 작업 영역에서 일반 영역으로 이동합니다.
변경을 선택합니다. 팝업 창에서: 나열된 일반 구성은 구성
에 추가된 것들입니다.일반 구성 중 하나를 선택하고 변경 버튼을 선택합니다.
일반 메뉴는 선택된 일반 구성으로 업데이트됩니다.
지정되지 않은 일반 가상 스테이션 구성만 삭제될 수 있습니다.
컨트롤러 정보 탭 작업
컨트롤러 정보  에 있는 메뉴는 선택한 하나의 컨트롤러에 대한 정보를 제공합니다.
에 있는 메뉴는 선택한 하나의 컨트롤러에 대한 정보를 제공합니다.
컨트롤러 정보 메뉴 보기:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.컨트롤러
탭으로 이동합니다.작업 영역은 컨트롤러 메뉴가 표시됩니다.
컨트롤러 작업 영역에서 다음 메뉴가 표시됨:
메뉴 | 기능 |
|---|---|
컨트롤러 정보 | 컨트롤러와 IAM 모듈에 대한 일반 정보를 제공합니다. |
라이선스 | 컨트롤러에 발급된 여러 라이센스 유형에 대한 정보를 제공합니다. |
소프트웨어 | 컨트롤러의 소프트웨어 구성에 대한 정보를 제공합니다. |
하드웨어 | PF6 컨트롤러의 하드웨어 구성에 대한 정보를 제공합니다. |
내보내기 / 가져오기 | 컨트롤러 결과와 구성 내보내기 및 컨트롤러 구성 가져오기를 제공합니다. 대화 상자가 파일 위치에 나타납니다. |
상태 | 환경 매개변수 및 시스템 상태 매개변수를 모니터링하고 기록합니다. |
표시되는 정보는 정보만을 위해 제공됩니다. 메뉴에서 매개변수 설정이 가능하지 않습니다.
컨트롤러 정보 및 IAM 메뉴
지능형 애플리케이션 모듈(IAM)은 컨트롤러 도어 안쪽에 위치합니다. 컨트롤러 프로그램, 구성 매개변수, 저장 결과를 포함합니다.
IAM 모듈을 쉽게 제거하고, 다른 컨트롤러로 이동할 수 있으며, 이전 컨트롤러에서와 동일하게 작동합니다.
컨트롤러 정보 메뉴와 현재의 구성 보기
공장 구조
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴가 표시됩니다.
메뉴 | 기능 |
|---|---|
모델 | 컨트롤러의 유형에 대한 일반 정보를 제공합니다. |
Serial number (일련 번호) | 컨트롤러의 일련 번호에 대한 정보를 제공합니다. |
서비스 이더넷 포트 | 서비스 포트의 IP 주소에 대한 정보를 제공합니다. 이 포트를 통해 서비스 엔지니어는 공장 네트워크에 연결하지 않고 컨트롤러에 액세스할 수 있습니다. |
메뉴 | 기능 |
|---|---|
유형 | Atlas Copco는 서로 다른 기능을 가진 다른 IAM 유형을 제공합니다. |
고객 키 | 애플리케이션별 또는 고객별 구성에 대한 식별자입니다. |
Serial number (일련 번호) | IAM 모듈의 일련 번호에 대한 정보를 제공합니다. |
소프트웨어 메뉴
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴가 표시됩니다.
메뉴 | 기능 |
|---|---|
현재 버전 | 주요 활성 작업 소프트웨어. |
저장된 버전 | 저장된 비활성 소프트웨어. |
설치된 소프트웨어 버전간에 전환하는 것이 가능하며 이러한 작업은 두 가지 장점을 갖습니다.
컨트롤러 소프트웨어는 정상 작동 병행하여 컨트롤러에 로드할 수 있습니다. 여러 컨트롤러가 업데이트될 경우, 동시에 모든 컨트롤러를 신속하게 스위치할 수 있습니다.
소프트웨어 업그레이드로 예기치 않은 결과가 발생하면 이전 버전으로 교체하여 빠르게 백업을 복구할 수 있습니다.
하드웨어 구성
이 메뉴는 시스템의 하드웨어 구성에 대한 정보를 제공합니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴가 표시됩니다.
Hardware 메뉴는 컨트롤러를 구성하는 다양한 하드웨어 모듈을 나열합니다.
각 모듈에서 제공되는 데이터:
일련 번호
품목 번호
소프트웨어 버전
내보내기 및 가져오기
내보내기 및 가져오기 기능은 컨트롤러 간 조임 프로그램, 배치 및 컨트롤러 구성을 전송할 수 있을 뿐만 아니라 외부 프로그램에서의 분석을 위해 결과 메뉴에 있는 이벤트 및 조임 결과를 내보내는 데 사용됩니다.
명령 내보내기를 사용할 수 있는 이유:
추가 처리를 위해 조임 결과 및 이벤트를 내보내는 경우.
Atlas Copco 서비스 엔지니어로부터 디버그 지원을 위해 로그 파일을 내보내는 경우.
구성을 다른 컨트롤러로 복사하는 데 사용할 수 있는 전체 컨트롤러 구성을 내보내는 경우.
차이를 보기 위해 내보낸 구성 두 개를 비교하는 경우.
공장 구조
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴를 표시합니다.
내보내기 버튼을 클릭하여 내보내는 항목:
매개변수
설명
Export (내보내기)
모든 컨트롤러 정보를 내보냅니다.
구성 내보내기
설정 및 구성을 내보냅니다.
공구 로그 내보내기
로그(조임 및 하드웨어 정보)를 연결된 공구에서 내보냅니다. SRB, TBP 및 STB에서 사용할 수 있습니다.
내보내기는 atlas_tool_i.zip과 ExportInfo.txt로 구성됨
내보내기 파일을 저장할 위치를 선택하고 확인을 클릭합니다.
공장 구조
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴를 표시합니다.
컨트롤러 구성을 가져오려면 가져오기 명령 단추를 클릭합니다.
파일 열기를 클릭합니다. 가져올 파일을 선택합니다.
가져오기 파일은 이전에 내보낸 파일이어야 합니다.
가져오기 기능을 사용하면 조임 프로그램, 배치, 부속품 및 컨트롤러에 대한 모든 설정이 가져오기 파일의 설정에 의해 대체됩니다. 그러나, 네트워크 설정, PIN, 결과 및 이벤트는 가져오지 않습니다.
시스템 상태 모니터
장비 상태 모니터는 정기적으로 매개변수를 측정하고 저장합니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.컨트롤러
로 이동합니다.작업 영역은 컨트롤러 메뉴가 표시됩니다.
상태 메뉴는 환경 데이터와 시스템 상태 정보를 표시합니다.
정보 | 값 | 설명 |
|---|---|---|
새로 고침 명령 단추 | 온도 C 또는 F | 컨트롤러에서 정보를 읽고 최신 결과를 표시합니다. |
컨트롤러 온도 | 온도 C 또는 F | 최신 온도 기록은 월/일/년 시간:분:초로 표현합니다. |
배터리 상태 | OK/NOK | 컨트롤러 컴퓨터 보드의 메모리 및 실시간 시계 배터리를 모니터합니다. 상태 메시지 NOK는 데이터 또는 잘못된 결과의 손실을 방지하기 위해 가능한 한 빨리 배터리를 교체해야 함을 의미합니다. 최신 기록은 월/일/년 시간:분:초로 표현합니다. |
기록 명령 단추 | 모니터 판독 목록을 제공합니다. |
설정 탭 작업
기본 설정
설정 메뉴는 언어, 토크 유닛 및 컨트롤러 인터페이스의 PIN 보호를 선택하는 데 사용되는 기본 섹션을 포함합니다.
컨트롤러 기본 설정 지정:
공장 구조
에서 컨트롤러를 선택하세요. 설정
 으로 이동합니다.
으로 이동합니다.작업 영역은 설정 메뉴를 표시합니다.
컨트롤러 기본 설정에 대한 매개변수:
매개변수 | 설명 | 기본값 |
|---|---|---|
Torque unit (토크 단위) | 컨트롤러 GUI 또는 웹 GUI 컨트롤러에서 표시되어야 할 토크 측정 결과 단위를 선택하세요. | Nm |
Temperature unit (온도 단위) | 컨트롤러 GUI 또는 웹 GUI에서 컨트롤러에 표시되는 온도 측정 결과의 단위를 선택하세요. | 섭씨 |
언어 | 컨트롤러 GUI 또는 웹 GUI에서 컨트롤러에 표시되는 언어를 선택합니다. | 영어 |
팩토리 포트를 통해 액세스 | 켜짐/꺼짐 컨트롤러와의 통신을 활성화(켜짐) 또는 비활성화(꺼짐)합니다. | 켜짐 |
PIN 사용 | 컨트롤러 GUI 또는 webHMI(공장 네트워크)를 통해 액세스 할 때 PIN을 컨트롤러에 사용할 수 있습니다. PIN은 GUI 또는 webHMI를 통해 컨트롤러에 액세스하는 사용자에게만 적용됩니다. 활성화된 PIN으로 인해 사용자가 ToolsTalk 2를 사용할 수 없거나 ToolsTalk 2에서 컨트롤러로 작업(구성 및 구성 푸시) 할 수 없습니다. 켜짐: 컨트롤러에 액세스하는 사용자는 컨트롤러에 대한 쓰기 액세스 권한을 얻기 위해 반드시 PIN 코드를 사용해야 합니다. 꺼짐: 사용자는 컨트롤러에 대한 쓰기 권한을 얻기 위해 PIN 코드가 필요하지 않습니다. | 꺼짐 |
서비스 포트에 PIN 코드 사용 | 서비스 포트를 통해 액세스 할 때 PIN 코드를 컨트롤러에 사용할 수 있습니다. 켜짐: 컨트롤러에 액세스하는 사용자는 컨트롤러에 대한 쓰기 액세스 권한을 얻기 위해 반드시 PIN 코드를 사용해야 합니다. 꺼짐: 사용자는 컨트롤러에 대한 쓰기 권한을 얻기 위해 PIN 코드가 필요하지 않습니다.
| 꺼짐 |
PIN 코드 | 추가 사용자당 4자리 PIN 코드를 선택해야 합니다. 사용자 PIN을 활성화/비활성화합니다. | |
무활동 타임아웃 | 컨트롤러 GUI 또는 웹 GUI가 활동 시간 제한 이후에 자동으로 잠깁니다. | 120초 |
PIN 설정
PIN을 사용해 인가되지 않은 컨트롤러 사용 또는 사고로 인한 변경을 방지합니다. 최대 10명의 사용자를 각각의 고유 PIN으로 컨트롤러에 추가할 수 있습니다. PIN은 컨트롤러 구성과 연결되지 않으며 주로 로깅에 사용됩니다.
PIN을 변경하거나 컨트롤러 GUI 또는 WebHMI에서 수정하면 변경을 시행한 사용자가 로그됩니다. 해당 기록은 외부 변경 알림 창의 변경자 열에 표시되고, 변경 기록에 추가됩니다.
PIN이 활성화되면 다음을 통해 컨트롤러에 액세스할 때 PIN 코드가 필요합니다.
컨트롤러 GUI
웹 GUI
PIN 활성화
설정 메뉴로 이동하고, PIN 사용을 켜짐으로 전환하세요.
PIN 코드를 선택하세요.
새로운 사용자의 PIN 코드 추가
PIN 코드 대화 창에서 추가를 선택하세요.
이름 필드에서 사용자 이름을 입력해 주세요.
PIN 설정을 선택하여 사용자 PIN을 설정해 주세요. PIN은 0000-9999 범위 내의 네 자리 수여야 합니다.
PIN 설정 대화 창이 열립니다. 두 개의 필드(PIN 설정 및 PIN 다시 입력)의 PIN은 일치해야 합니다.
확인을 선택합니다.
사용자 목록에서, 활성화하고 싶은 사용자 이름의 오른쪽에 있는 확인란을 선택해 주세요.
PIN이 활성화되면, 구성된 비활성 시간 후에 컨트롤러가 자동으로 잠깁니다.
PIN을 비활성화하려면, 비활성화하고 싶은 사용자 이름의 오른쪽에 있는 확인란을 선택 해제하세요.
사용자/PIN 삭제
사용자 목록에서 삭제할 각 사용자의 PIN 확인란에 표시하고 삭제 단추를 선택하세요.
PIN으로 잠겼을 때 컨트롤러에 액세스하기
PIN이 활성화된 상태에서 컨트롤러를 액세스하면, PIN을 요청하는 프롬프트가 나타납니다. 이는 웹 GUI, 컨트롤러 GUI를 통해 컨트롤러가 액세스된 경우입니다.
공구 서비스 알람
설정 메뉴에는 서비스 표시기 알람 및 표시 교정 알람에 대한 공구 경보 선택에 사용되는 공구 섹션이 있습니다.
공구 알람 설정하기:
공장 구조
에서 컨트롤러를 선택합니다. 설정
으로 이동합니다.작업 영역은 설정 메뉴를 표시합니다.
매개변수 | 설명 | 기본값 | 위치 |
|---|---|---|---|
서비스 표시자 알람 | 스위치에서 선택합니다. 알람을 켜거나 끕니다. 서비스 간격에 도달하면 알람이 트리거됩니다. | 꺼짐 | |
교정 알람 표시 | 스위치에서 선택합니다. 공구가 지정된 시간 내에 교정되지 않은 경우 교정 알람을 트리거합니다. 마지막 교정 날짜는 공구 메뉴에서 볼 수 있습니다. 기본 간격은 1년이지만 컨트롤러 GUI 또는 웹 GUI에서 변경할 수 있습니다. | 꺼짐 |
서버 연결
ToolsNet 서버와의 컨트롤러 통신
컨트롤러는 항상 결과를 ToolsTalk 2로 보냅니다. 컨트롤러는 또한 추가 처리를 위해 ToolsNet 8에 결과를 보낼 수 있습니다. ToolsNet 서버 주소는 컨트롤러에서 구성해야 합니다.
컨트롤러와 ToolsNet 서버 간의 통신을 설정하는 방법:
공장 구조
에서 컨트롤러를 선택합니다.설정
으로 이동합니다.작업 영역은 설정 메뉴를 표시합니다.
ToolsNet로 이동하고, ToolsNet 서버와의 통신을 활성화 또는 비활성화로 설정합니다.
통신을 사용하는 경우, 서버의 IP 주소와 포트 번호를 설정합니다.
매개변수 | 설명 | 기본값 | 주석 |
|---|---|---|---|
ToolsNet 활성화됨 | 서버 통신을 활성화/비활성화합니다. | 꺼짐 | |
서버 호스트 | ToolsNet 서버 IP 주소. |
| 통신 가능. |
서버 포트 | ToolsNet 서버 포트. |
| 통신 가능. |
컨트롤러의 날짜 및 시간
각 컨트롤러는 시간과 정확한 보고를 위해 프로그램된 날짜와 시간이 설정되어 있어야 합니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.설정
탭으로 이동합니다.작업 영역은 일반 설정 메뉴를 표시합니다.
시간 기준의 소스를 선택합니다.
선택한 시간 소스에 따라 추가 매개변수를 입력합니다.
시간대의 바로 가기 메뉴에서 컨트롤러 로컬 시간대를 선택합니다.
최고의 시간 정확성과 안정성을 달성하기 위해 모든 컨트롤러와 통신할 수 있는 NTP 서버를 사용하는 것을 권장합니다.
시간 소스는 바로 가기 메뉴에서 선택하고 다음 중 하나가 될 수 있음:
수동으로 컨트롤러에 시간과 날짜를 입력합니다. 모든 GUI 인터페이스를 통해 이를 수행할 수 있습니다.
표준화된 네트워크 타임 프로토콜(NTP)를 사용합니다. 서버는 연결된 컨트롤러에 시간 기준을 배포합니다. 서로 다른 NTP 서버를 최대 2개까지 구성할 수 있습니다.
컨트롤러가 ToolsNet 서버에 온라인으로 연결되어 있는 경우, 시간 기준으로 ToolsNet 서버를 사용합니다. 시간 기준으로 ToolsNet를 사용할 때, 서로 별도의 시간대에 있는 경우에도 서버와 컨트롤러를 같은 시간대로 설정하는 것이 중요합니다.
날짜와 시간 추가 및 구성:
매개변수 | 조건 | 설명 |
|---|---|---|
소스 | 선택은 바로 가기 메뉴에서 이루어집니다. 컨트롤러 시간과 날짜를 구성하는 방법을 선택합니다. | |
표준시간대 | 선택은 바로 가기 메뉴에서 이루어집니다. 컨트롤러가 위치한 시간대를 선택합니다. | |
시간 | 소스 = 수동 | 시간:분:초 형식으로 시간을 입력합니다. |
Date (날짜) | 소스 = 수동 | 캘린더 기호에서 날짜를 입력합니다. |
SET 명령 단추 | 소스 = 수동 | 컨트롤러에 입력한 날짜와 시간을 보냅니다. 이 명령을 실행하려면, 컨트롤러가 온라인 상태여야 합니다. |
추가 명령 단추 | 소스 = NTP | 추가 NTP 서버 주소를 추가합니다. |
삭제 명령 단추 | 소스 = NTP | 선택한 NTP 서버 주소를 삭제합니다. |
NTP 서버 | 소스 = NTP | NTP 서버의 IP 주소를 입력합니다. |
이벤트 메뉴
이벤트는 작업자에게 보고되는 오류 등의 경우 작업 상태 및 기타 정보입니다. 모든 이벤트는 구성할 수 있으며, 다른 심각도를 가질 수 있습니다.
이벤트 유형 | 기능 |
|---|---|
디스플레이 | 이벤트는 정보를 제공할 수 있고, 컨트롤러 화면에서 짧은 시간 동안 표시됩니다. |
로그 | 이벤트는 정보를 제공할 수 있고, 컨트롤러 화면에서 짧은 시간 동안 표시되고, 로그 파일에 기록됩니다. 이벤트 |
승인 | 작업자가 승인해야 하는 이벤트. 이벤트를 승인하려면 작업자는 부속품의 버튼을 누르거나, 컨트롤러 터치 스크린을 누르거나, 웹 GUI를 통해 이벤트를 승인해야 합니다. |
이벤트 구성은 모든 이벤트 신호가 처리되는 방법을 결정합니다.
A | 이벤트 검색 창 | B | 이벤트 목록 |
사용 가능한 모든 이벤트는 참조 장에 나열되어 있습니다. 이벤트의 두 가지 범주:
표준 이벤트는 Atlas Copco에서 정의하며, 모든 결과물에 사용할 수 있습니다.
사용자 정의 이벤트는 고객의 요청에 따라 Atlas Copco에서 구현하며, 특정 고객에 대해서만 유효하고 사용할 수 있습니다.
이벤트 구성
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.설정
탭으로 이동하여 이벤트를 선택합니다.검색 창을 사용하여 특정 이벤트를 검색하거나 섹션을 선택하고 이벤트를 스크롤ㄹ하여 원하는 이벤트 코드를 찾습니다.
다음 중 하나 이상을 선택하거나 선택 취소하십시오.
승인, 이벤트가 표시되고 작업자가 승인하는 경우.
로그, 이벤트가 표시되고, 로그 파일에 기록되며, 이벤트
 탭에 보이느ㅡㄴ 경우.
탭에 보이느ㅡㄴ 경우.
표시, 이벤트가 화면에 표시될 경우.
세부 정보 필드에 고객 별 의견을 쓸 수 있습니다.
이벤트 취급 구성이 준비되면, 특정 컨트롤러에 변경 사항을 푸시합니다.
구성되어야 할 모든 컨트롤러에 대해 3 - 5단계를 반복합니다.
이벤트 코드 번호 0000~7999는 표준 이벤트입니다.
이벤트 코드 번호 8000~7999는 고객 전용 이벤트입니다.
이벤트를 라이브러리에 추가하기
설정
을 선택한 다음, 이벤트 구성 탭에서 관리를 선택합니다. 드롭다운 목록에서 라이브러리에 추가를 선택합니다.두 개의 구성 옵션을 포함하는 글로벌 구성 만들기 대화 창이 열립니다.
기본 값으로 자동 되돌리기가 설정됩니다.
연결 해제
만들기를 선택하면, 이제 이벤트 구성이 잠기고 글로벌 이벤트 라이브러리에 표시됩니다.
조치 | 결과 |
|---|---|
자동 되돌리기 | 프로그램이 ToolsTalk 2에서 글로벌 이벤트로 표시된 경우 컨트롤러 GUI 또는 웹 GUI를 통한 이벤트 업데이트는 무시됩니다. 업데이트가 수행된 후 ToolsTalk 2로 다시 전송되며, ToolsTalk 2에서는 변경 사항은 인식 되지만 승인이 되지는 않습니다 오리지널 글로벌 이벤트 프로그램은 즉시 컨트롤러로 다시 푸시됩니다. |
연결 해제 | 컨트롤러 GUI 또는 웹 GUI를 통해 이벤트를 업데이트하면, 영향 받는 컨트롤러에 대하여 프로그램이 글로벌 이벤트에서 로컬 이벤트로 변경됩니다. 업데이트가 수행된 후 ToolsTalk 2로 다시 전송되며, ToolsTalk 2에서는 변경 사항이 인식됩니다. 그 결과로 이벤트는 즉시 해당 컨트롤러의 배포 목록에서 제거됩니다. |
글로벌 이벤트가 컨트롤러에 배포되기 위해 구성될 때 자동 되돌리기 또는 링크 해제를 선택해야 합니다. 선택은 나중 스테이지에서 변경할 수 없습니다.
필드버스, SoftPLC 및 비주기적 데이터 탭 작업
필드버스 및 비주기 데이터 그리고 SoftPLC는 한 컨트롤러가 공장 구조에서 선택된 경우에 필드버스 및 SoftPLC
에 위치합니다.
필드버스는 공장 관리 시스템(필드버스 마스터)과 원격 노드(필드버스 하위 구성요소) 사이의 통신 링크입니다.
필드버스 및 SoftPLC는 4개의 섹션으로 구분됩니다.
개요
필드버스
SoftPLC
비주기
필드버스 개요
필드버스 통신을 사용하는 전형적인 공장 관리 컨트롤러 시스템은 컨트롤러와 통신할 때 아래 그림처럼 표시될 수 있습니다.
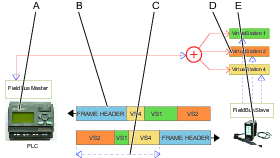
A | 필드버스 마스터 (PLC) | B | 프레임 헤더 |
C | 프로세스 데이터 프레임 내부의 여러 가상 스테이션에서 주고 받는 사용자 데이터 | D | 가상 스테이션 |
E | 여러 가상 스테이션이 있는 컨트롤러 |
일반적으로 PLC인 필드버스 마스터는 필드버스 하위 구성요소라는 여러 원격 노드 정보를 교환합니다. 마스터는 한 번에 한 하위 구성요소와 통신합니다. 마스터는 하위 구성요소에 프레임을 발신하고, 응답으로 다른 프레임을 수신합니다.
PLC는 데이터를 애니버스 모듈로 전송한 다음 식별 데이터, 작업 선택 정보 및 기타 신호를 포함할 수있는 컨트롤러와 통신합니다.
컨트롤러는 이벤트 신호, 상태 신호, 조임 결과, 기타 신호를 포함할 수 있는 애니버스 모듈을 통해 PLC로 응답을 보냅니다.
프로세스 데이터의 업데이트 빈도가 다를 수 있습니다. 컨트롤러와 애니버스 모듈 사이의 업데이트 주파수는 약 100Hz이고 애 버스 모듈과 PLC 사이의 업데이트 주파수는 약 500Hz입니다.
물리적 전송 링크는 선택한 필드버스 유형 따라 달라집니다. 발신은 주소 정보를 포함하는 프레임 헤더 및 모든 데이터가 포함된 프로세스 데이터 프레임으로 구성되어 있습니다.
컨트롤러가 가상 스테이션을 지원하는 경우, 각 가상 스테이션에 올바른 정보를 유도하는 것이 중요합니다. 프로세스 데이터 프레임은 각 가상 스테이션에 대하여 하나씩 필드버스 맵을 포함할 수 있습니다.
필드버스 구성 매개변수
아이템은 최하위 비트의 위치를정의하여 필드버스 맵에 배치됩니다. 이 위치는 바이트 수와 비트 수에 의해 식별됩니다.
정보 | 설명 |
|---|---|
시작 바이트 | 최하위 항목이 위치한 바이트 수. 0 ~ 크기에서 1을 뺀 범위 내의 숫자입니다. 넘버링은 0에서 시작합니다. 최하위 바이트 또는 비트는 0입니다. |
시작 비트 | 최하위 항목이 위치한 비트 수. 이전에 선택한 시작 바이트에서 시작합니다. 0 ~ 7 범위 내의 숫자입니다. 넘버링은 0에서 시작합니다. 최하위 바이트 또는 비트는 0입니다. |
길이 | 항목에 있는 비트 수를 나타내는 수치. |
범위 | 정보만을 위한 용도입니다. 선택된 항목의 최소 길이, 최대 길이, 기본 길이 정보를 제공합니다. |
변환기 | 사용 가능한 신호 변환기의 드롭다운 목록. SoftPLC가 항목을 디지털 형식으로 표시되는 방법에 대한 요구 사항이 있는 경우에 사용됩니다. |
아이템 변환기는 다른 데이터 유형 간에 항목을 변환합니다.
정보 | 설명 |
|---|---|
부울 반전 | 디지털 신호를 액티브 하이(1)에서 액티브 로우(0)로 반전합니다. |
고정점 |
|
필드버스 정의
항목은 디지털 신호입니다. 예를 들면 컨트롤러 참조 섹션에 설명된 신호가 될 수 있음:
조임 OK와 같은 단일한 정보.
이벤트 코드와 같은 여러 정보 비트.
항목은 카운터 값, 식별자 번호 또는 조임 결과를 나타내는 복수의 정보 비트일 수 있습니다.
항목은 문자열이 될 수 있습니다.
정보 | 설명 |
|---|---|
필드버스 항목 | 부울: 이 신호는 한 비트 위치를 차지하는 간단한 부울 표현이 될 수 있습니다. 예는 디지털 IO 신호입니다. |
정수: 데이터는 어레이에서 한 개 이상의 데이터 비트를 점유합니다. | |
문자 또는 문자열: 신호는 한 개 이상의 바이트 위치를 점유하는 영숫자 문자열이 될 수 있습니다. |
정보 | 설명 |
|---|---|
필드버스 맵 | 데이터 어레이. 크기는 짝수 바이트여야 합니다. 필드버스 메뉴 내의 필드버스 창에서 필드버스 맵이 생성됩니다. 필드버스 항목은 필드버스 맵에 배치되어 마스터-하위 구성요소 통신을 위한 고유한 배열을 생성합니다. 항목은 시작 위치와 길이를 정의하여 배열에 배치되며, 비트 수로 표시됩니다. |
프로세스 데이터 프레임 | 데이터 어레이. 크기는 짝수 바이트여야 합니다. 프로세스 데이터 프레임은 필드버스 메뉴의 필드버스 창에서 생성됩니다. 가상 스테이션에 할당될 때 필드버스 맵은 프로세스 데이터 프레임에 배치됩니다. 프레임 내의 맵 위치는 오프셋에 의해 정의되고, 이는 프레임 시작부터 계산됩니다. |
필드버스 구성 | 필드버스 매핑 구성은 필드버스 메뉴의 필드버스 창에서 생성됩니다. 구성 매개변수는 일반 매개변수 및 유형 특정 매개변수로 구성되어 있습니다. 필드버스 유형을 선택한 후 매개변수 입력 상자의 목록이 표시됩니다. |
정보 | 설명 |
|---|---|
오프셋 | 포인터 변수. 이 신호는 한 비트 위치를 차지하는 간단한 부울 표현이 될 수 있습니다. 예는 디지털 IO 신호입니다. |
시작 바이트 | 포인터 변수. 항목의 LSB를 포함하는 필드버스 맵 내의 바이트를 가리킵니다. |
시작 비트 | 포인터 변수. 항목의 LSB를 포함하는 필드버스 맵 내에서 이전에 정의한 비트를 가리킵니다. |
항목 길이 | 비트 수로 표현된 크기 변수. |
LSB | 최하위 비트 또는 바이트. |
이름 | 설명 |
|---|---|
필드버스 전송 | 네트워크를 통해 전송된 데이터그램. 발신 노드는 주소 정보를 포함하는 프레임 헤더와 네트워크로 전송되는 프로세스 데이터 프레임을 결합합니다. 수신 노드는 프레임 헤더에서 주소를 감지하고 프로세스 데이터 프레임을 회수합니다. |
프레임 헤더 | 네트워크를 통한 오류없는 전송을 보장하기 위한 네트워크 주소 정보 및 기타 데이터 |
필드버스 마스터 | 일반적으로 필드버스 하위 구성요소와 통신을 개시하는 PLC. 마스터는 데이터 프레임을 발신하고, 하위 구성요소에서 다른 프레임을 수신합니다. |
필드버스 하위 구성요소 | 필드버스 마스터로부터 발신에 응답하는 원격 노드. 하위 구성요소가 전송을 탐지하면 프레임을 수신하고, 다른 프레임을 발신자로 전송함으로써 응답합니다. |
필드버스 데이터 유형
각 필드버스는 버스를 통해 전송할 수 있는 데이터 양과 관련된 자체 용량을 갖고 있습니다.
주기적 데이터: 주기적 데이터( "암시적"또는 "필수" 데이터라고도 지칭됨)는 일반적으로 시작, 중지, OK, NOK 등과 같은 PLC 데이터/ 프로세스 데이터입니다. 주기적 데이터 전송은 마스터와 컨트롤러 필드 버스 사이에서 정기적으로(예: 100ms) 실행되며 작동에 중요한 명령을 포함하는 한 될 수 있으면 자주 업데이트해야 합니다.
비주기적 데이터: 비주기적 데이터( "정보"라고도 지칭됨)는 일반적으로 조임 데이터입니다. 비주기적 데이터는 주기적 데이터 필드버스 매핑 외부에 있으며 비주기적 데이터 전송은 마스터에서 컨트롤러 필드 버스로의 요청에 대해서만 실행됩니다.
비동기 데이터: 비동기 데이터는 주기적 데이터 전송의 일부이자 매핑의 일부인 조임 데이터이며 비주기적 데이터(CC Link)를 지원하지 않는 필드버스 유형에 적합합니다. 비동기 데이터 기능은 필드버스를 통해 패키지로 주기적 데이터와 함께 조임 결과를 PLC로 전송하기 위해 사용할 수 있습니다. 그런 다음 PLC는 모든 패키지를 하나의 조임 결과로 병합합니다. 컨트롤러의 비동기 데이터는 PF가 전송하는 필드버스 비동기 데이터 I/O 신호와 통신하고 비동기 데이터는 PF로 전송되는 필드버스 비동기 데이터 I/O 신호를 사용하여 컨트롤러와 통신합니다. 이 신호는 비주기적 데이터에 사용된 동일한 유형의 핸드 셰이크인 비동기 데이터 핸드 셰이크에 사용됩니다. PF가 전송하는 필드버스 비동기 데이터의 크기는 인스턴스 크기 또는 레코드 크기로 간주될 수 있으며 각 비동기 데이터 헨드셰이크 요청에 대해 전송되는 데이터의 바이트 크기를 나타냅니다.
예를 들면, 총 비주기적 데이터 구성이 1024 바이트이고 PF로 전송되는 필드버스 비동기 데이터가 64 바이트로 설정된 경우, 매회 총 비동기 데이터는 16회 X 64 바이트로 전송됩니다. 즉, PLC의 각 요청에 대해 컨트롤러는 총 비동기 데이터에서 다음 64 bytes의 데이터로 PF로 전송되는 필드버스 비동기 데이터를 채웁니다.
이론적으로, PF에서 전송하는 필드버스 비동기 데이터 를 2 bytes로 정의하면 최대 32 Kbytes(16K 데이터 요청이 필요함)의 데이터를 전송할 수 있습니다.
필드버스 크기
항목 | DeviceNet | 이더넷/IP | Profinet I/O | Profibus DP-V1a | CC-링크 | CC-링크 IE | |
|---|---|---|---|---|---|---|---|
a Profibus DP-V1 전용: 비주기적 데이터의 전송 속도는 조임을 트리거하는 빈도에 따라 최대 1 kB/s 입니다. 이 최대 용량은 비주기적 데이터를 전송할 수 있는 양에 장애가 됩니다. 예를 들어, 3초마다 조임을 수행할 경우 3kB/조임을 초과하여 전송할 수 없습니다. | |||||||
최대, 주기적 데이터 (읽기 + 쓰기) | 512 | 512 | 512 | 128(368) | 해당 사항 없음 | 512 | |
최소 주기적 데이터 (읽기 + 쓰기) | 0 | 0 | 0 | 1 | 해당 사항 없음 | 0 | |
최대 주기적 데이터 (읽기) | 256 | 256 | 256 | 128(244) | 해당 사항 없음 | 256 | |
최소 주기적 데이터 (쓰기) | 0 | 0 | 0 | 0 | 해당 사항 없음 | 0 | |
최대 주기적 데이터 (읽기) | 256 | 256 | 256 | 128(244) | 해당 사항 없음 | 256 | |
최소 주기적 데이터 (읽기) | 0 | 0 | 0 | 0 | 해당 사항 없음 | 0 | |
최대 비주기적 데이터 (읽기 + 쓰기) | 65535 | 65535 | 65535 | 65535 | 해당 사항 없음 | 65535 | |
최소 비주기적 데이터 (읽기 + 쓰기) | 0 | 0 | 0 | 0 | 해당 사항 없음 | 0 | |
최대 비주기적 데이터 (쓰기) | 65535 | 65535 | 65535 | 65535 | 해당 사항 없음 | 65535 | |
최소 비주기적 데이터 (쓰기) | 0 | 0 | 0 | 0 | 해당 사항 없음 | 0 | |
최대 비주기적 데이터 (읽기) | 65535 | 65535 | 65535 | 65535 | 해당 사항 없음 | 65535 | |
최소 주기적 데이터 (읽기) | 0 | 0 | 0 | 0 | 해당 사항 없음 | 0 | |
CC 링크 버전 1
점유된 스테이션 | 비트 포인트 (bits) | 단어 포인트 (단어 수) | 총 (Bit + 단어, 단위는 bytes) |
|---|---|---|---|
1 | 32 | 4 | 12 |
2 | 64 | 8 | 24 |
3 | 96 | 12 | 36 |
4 | 128 | 16 | 48 |
CC 링크 버전 2
점유된 스테이션 | 1 연장 사이클 | 2 연장 사이클 | 4 연장 사이클 | 8 연장 사이클 | ||||
포인트 | 총 | 포인트 | 총 | 포인트 | 총 | 포인트 | 포인트 | |
1 | 32 bits | 12 bytes | 32 bits | 20 bytes | 64 bits | 40 bytes | 128 bits | 80 bytes |
4 단어 | 8 단어 | 16 단어 | 32 단어 | |||||
2 | 64 bits | 24 bytes | 96 bits | 44 bytes | 192 bits | 88 bytes | 384 bits | 176 bytes |
8 단어 | 16 단어 | 32 단어 | 64 단어 | |||||
3 | 96 bits | 36 bytes | 160 bits | 68 bytes | 320 bits | 136 bytes | 640 bits | 272 bytes |
12 단어 | 24 단어 | 48 단어 | 96 단어 | |||||
4 | 128 bits | 48 bytes | 224 bits | 92 bytes | 448 bits | 184 bytes | 896 bits | 368 bytes |
16 단어 | 32 단어 | 64 단어 | 128 단어 | |||||
개요 구성 탭
필드버스 설정
연결 상태가 표시할 수 있는 상태 메시지:
상태 | 설명 |
|---|---|
Fieldbus_Online | 필드버스 모듈이 온라인 상태입니다. 컨트롤러와 필드버스 마스터 간의 통신이 활성화되어 있습니다. |
Fieldbus_Offline | 필드버스 모듈이 오프라인 상태입니다. 컨트롤러와 필드버스 마스터 간의 통신이 비활성화되어 있습니다. |
Fieldbus_NoModuleInstalled | 컨트롤러는 필드버스 모듈에 탐지되지 않습니다. |
Fieldbus_NotConfigured | 필드버스 모듈은 컨트롤러에서 탐지되지만, 모듈이 구성되지 않았습니다. |
Fieldbus_Initializing | 리셋 도중 필드버스 상태 또는 글로벌 매개변수 변경 시 결과. 이는 고정 상태가 표시될 때까지의 임시 상태입니다. |
필드버스 상태는 오류를 표시할 수 있음:
오류 코드 | 설명 | 조치 |
|---|---|---|
Fieldbus_ModuleMismatch | 지원되는 모듈. 매개변수 불일치가 탐지되었습니다. | Atlas Copco에 연락하여 오류 로그를 읽을 수 있습니다. |
Fieldbus_UnsupportedModuleInstalled | 지원되지 않는 필드버스 모듈. | Atlas Copco에 연락하여 오류 로그를 읽을 수 있습니다. |
Fieldbus_ConfiguredModuleNot Installed | 구성 데이터를 만들었습니다. 모듈이 탐지되지 않습니다. | Atlas Copco에 연락하여 오류 로그를 읽을 수 있습니다. |
Fieldbus_Unexpectedconfigurationerror | 컨트롤러와 ToolsTalk 2 간의 불일치. | Atlas Copco에 연락하여 오류 로그를 읽을 수 있습니다. |
프레임 크기, 필드버스 모듈 주소 같은 일부 글로벌 매개변수를 변경하면, 필드버스 모듈이 리셋됩니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC를 선택한 다음
개요 하위-탭을 선택합니다.필드버스 설정의 드롭다운 메뉴에서 필드버스의 유형을 선택합니다.
수신 및 발신 방향에 대하여 전체 프레임 크기를 바이트 단위로 입력합니다. 이 값은 짝수인 정수여야 합니다.
필드버스 유형 특정 매개변수를 입력합니다.
일반 필드버스 매개변수
필드 | 설명 | 기본값 |
|---|---|---|
Fieldbus type (필드버스 유형) | 드롭다운 메뉴에서 필드버스 유형을 선택하세요.
| 한정되지 않음 |
Update interval (갱신 간격) | 프로세스 데이터 프레임이 전송되는 빈도를 설정합니다. 값은 밀리초 단위로 표현됩니다. 최소 값은 100 밀리초입니다. |
|
필드버스 오프라인 시 공구 잠금 | 선택 스위치 켜짐-꺼짐. 필드버스 모듈이 필드버스 마스터(PLC)와 통신이 끊길 경우 컨트롤러 작업을 결정합니다. | 꺼짐 |
핸드셰이크 결과 읽기 | 선택 스위치 켜짐-꺼짐. 켜짐이면, 설정은 모든 가상 스테이션에 영향을 미칩니다. 핸드셰이크 결과 읽기 신호는 필드버스 구성에 매핑되어야 합니다. 승인할 결과가 없음일 때 생성된 결과는 즉시 PLC로 전송됩니다. 승인할 결과는 대기열에 배치되며, 승인된 다음 삭제되고 대기열의 다음 결과가 전송됩니다. 지워진 결과와 대기열에 있는 다음 결과 사이의 시간은 일반 필드버스 설정에서 설정한 필드버스에 대한 사이클 시간에 따라 달라집니다. 설정이 변경되거나 또는 가상 스테이션의 필드버스 매핑이 변경되는 경우, 대기열에 있는 결과는 플러시되고 PLC로 전송되지 않습니다. | 꺼짐 |
네트워크로 설정 | 선택 스위치 켜짐-꺼짐. 필드버스 통신 모듈을 구성하는 방법을 결정합니다.
| 꺼짐 |
선택한 작업 동기화 | 꺼짐 | |
바이트 순서 동기화 데이터 | 순환 데이터에 사용되는 바이트 순서를 선택해 주세요.
| 네트워크로 설정 |
바이트 순서 비주기적 데이터 | 비주기적 데이터에 사용되는 바이트 순서를 선택해 주세요.
| 모토로라 (빅) |
비동기 데이터를 자동으로 로드 | 선택 스위치 켜짐-꺼짐. 켜짐으로 설정하면, 첫 번째 비동기 데이터이며 유일한 패키지가 자동으로 로드됩니다. 이 기능을 활성화하면, 필드버스 마스터는 새로운 주기를 시작하기 전에 데이터를 판독하는 것이 완료되었는지를 확인해야 합니다. | 꺼짐 |
핸드셰이크 프로토콜 없이 조임 결과 구성하기
각 스핀들의 최종 각도와 최종 토크로 비주기적 구성을 구성하세요.
컨트롤러에서 필드버스 비주기적 데이터 신호를 사용하여 필드버스 구성을 구성하세요.
필드버스 구성과 비주기적 구성을 모두 가상 스테이션에 매핑하세요
일반 필드버스 구성에서 비동기 데이터 자동 로드 = 켜짐을 선택하세요.
조임 후 사용자는 컨트롤러의 필드버스 비주기적 데이터 신호에서 결과를 얻을 수 있습니다.
DeviceNet용 필드버스 매개변수
아래 표에는 DeviceNet의 특정 매개변수만 나열되어 있습니다. 일반 매개변수에 대한 내용은, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
필드버스 노드 주소 |
|
|
전송 속도 | 통신 링크의 속도. 드롭다운 메뉴에서 속도를 선택합니다. 125 kbps, 250 kbps, 500 kbps, 자동. | 자동 |
연결 모드 | 필드버스 마스터(SoftPLC)와 하위 컨트롤러 사이의 통신 유형을 선택해 주세요. 드롭다운 메뉴에서 선택.
|
|
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
EtherNet/IP에 대한 필드버스 매개변수
아래 표에는 EtherNet/IP의 특정 매개변수만 나열되어 있습니다. 일반 매개변수에 대한 내용은, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
필드버스 노드 IP 주소 | 형식은 0.0.0.0임 |
|
서브넷 마스크 | 형식은 0.0.0.0임 |
|
Gateway (게이트웨이) | 형식은 0.0.0.0임 |
|
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
ProfinetIO에 대한 필드버스 매개변수
아래 표에는 ProfinetIO의 특정 매개 변수만 나열되어 있습니다. 일반 매개변수에 대해서는, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
장치 이름 | 장치의 이름 | |
필드버스 노드 IP 주소 | 형식은 0.0.0.0임 |
|
서브넷 마스크 | 형식은 0.0.0.0임 |
|
Gateway (게이트웨이) | 형식은 0.0.0.0임 |
|
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
장치 이름 매개변수는 필드버스에 PROFINET에서 모듈을 식별하고, RFC 5890에 설명된 구문을 이용합니다.
프로피버스를 위한 필드버스 매개변수
아래 표에는 Profibus의 특정 매개변수만 나열되어 있습니다. 일반 매개변수에 대한 내용은, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
선택한 작업 동기화 | 활성화된 경우 작업 변경 시 필드버스 프레임을 다시 동기화해야 합니다. | |
확장 모드 | 이전 버전과 호환되는 152 bytes 데이터 모드와 368 bytes 데이터 모드 중에서 선택해 주세요
| |
필드버스 노드 주소 |
|
|
최대 ADI 크기 | 서로 다른 애플리케이션 데이터 인스턴스 크기 중에서 선택하여 최대 값으로 설정해 주세요. 하나의 단일 ADI에 매핑된 데이터에 대해서만 데이터 일관성이 보장됩니다. 즉, 전송할 데이터가 더 크거나 두 개의 ADI에서 손상되는 경우, 데이터 일관성을 보장받을 수 없습니다. 전송된 데이터 유형 크기와 같고 전체 프레임 크기에 올바르게 매핑되는 최대 ADI 크기를 설정하면, 데이터의 일관성이 보장됩니다. 주기적 데이터 전송에 사용할 최대 데이터 크기는, 필드버스 마스터에서 사용되는 데이터 크기와 반드시 일치해야 합니다. 최대 크기 ADI는 해당 크기보다 작게 매핑될 때까지 사용됩니다. 예를 들어, 최대 ADI 크기가 8 바이트로 설정되면 8 바이트 미만이 남을 때까지 매핑에 사용되며 나머지 데이터를 전송하는 데 4, 2, 1 바이트가 사용됩니다. | |
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
CC 링크를 위한 필드버스 매개변수
아래 표에는 CC Link에 대한 특정 매개변수만 나열되어 있습니다. 일반 매개변수에 대한 내용은, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
전송 속도 | 통신 링크의 속도. 드롭다운 메뉴에서 속도를 선택합니다. 156 kbps; 625 kbps; 2500 kbps; 5 Mbps; 10 Mbps. | 156 kbps |
필드버스 노드 주소 | 네트워크 내의 각 개별 장치에 대한 고유한 주소 | |
버전 | 버전 1: 기본 설정으로, 모듈은 매핑된 프로세스 데이터를 기초하여 필요한 점유 스테이션 수를 자동으로 계산합니다. 버전 2: CC-링크에서 네트워크 설정을 실행하여, CC-링크 버전 2에 대한 실행을 사용자 정의하고 확장 사이클을 통해 더 큰 데이터 크기를 사용할 수 있습니다. | |
점유된 스테이션 | 매개 변수 설정은 선택한 버전에 따라 달라집니다. 이 설정은 연장 사이클 매개 변수와 함께 사용됩니다. | |
연장 사이클 | 버전 및 점유된 스테이션 매개변수와 함께 더 큰 데이터 크기를 전송에 사용되는 매개 변수 설정. | |
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
CC 링크 IE를 위한 필드버스 매개변수
아래 표에는 CC Link IE에 대한 특정 매개변수만 나열되어 있습니다. 일반 매개변수에 대한 내용은, 일반 필드버스 매개변수를 참조하세요.
필드 | 설명 | 기본값 |
|---|---|---|
스테이션 번호: | 네트워크상의 각 장치는 반드시 고유한 스테이션 번호에 할당되어야 합니다. | |
네트워크 번호 | 네트워크는 주소 지정에 사용되는 각각의 고유한 네트워크 번호가 있는 여러 부분으로 나눌 수 있습니다. | |
컨트롤러까지 | 총 수신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 수신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. | |
컨트롤러부터 | 총 발신 프로세스 데이터 프레임. 프레임 크기는 모든 가상 스테이션 발신 프레임의 조합입니다. 크기는 바이트 수로 표시됩니다. |
일반 필드버스 설정의 비주기 데이터
데이터 인스턴스 크기 추가하기
필드버스 설정에서 사용자는 크기 범위 계산에 사용되는 데이터 인스턴스 크기를 설정할 수 있습니다. 인스턴스는 비주기적 데이터의 첫 번째 바이트를 읽을 위치를 정의합니다.
이 작업은 다음 필드버스 유형에 대해서만 가능합니다:
이더넷 IP
DeviceNet
Profinet IO
프로피버스
CC-링크 IE
공장 구조
에서 컨트롤러를 선택합니다. 필드버스 및 SoftPLC 탭
으로 이동합니다.개요 하위-탭을 선택합니다.
데이터 인스턴스 크기 필드에 값을 입력합니다.
데이터 인스턴스 크기에 대한 값은 인스턴스의 크기를 정의합니다. 이 값은 가상 스테이션과의 비주기 필드버스 매핑의 모든 인스턴스에 대해서도 일반적입니다. 기본값: 최대 64: 255 (256 bytes)
CC 링크에 대한 크기 범위 계산은 자동으로 실행됩니다.
비주기 필드버스 매핑 삭제하기
가상 스테이션 매핑 구성 영역에서 컨트롤러의 비주기 탭을 선택합니다.
삭제해야할 필드버스 매핑의 확인란을 선택하고 삭제를 선택합니다.
SoftPLC 설정
크기
PLC의 필드 버스에 할당된 인바운드 및 아웃 바운드 크기는 컨트롤러로 및 컨트롤러에서 필드에서 설정할 수 있습니다.
PLC의 필드버스가 구성되지 않은 경우, 인바운드 및 아웃 바운드 크기 모두에 대해 프레임 크기가 0으로 표시됩니다.
오프셋
필드버스 맵 사이의 순서를 수동으로 변경하고 필드버스 맵 사이의 간격을 제어할 수 있습니다 두 기능 모두 오프셋 매개변수가 제어합니다. 이 값은 프로세스 데이터 프레임 어레이의 필드버스 맵 시작 위치를 정의합니다.
오프셋 변경
컨트롤러로 섹션에서, 프로세스 데이터 프레임 내의 필드버스 맵의 오프셋을 입력하세요.
컨트롤러에서 섹션에서,프로세스 데이터 프레임 내의 필드버스 맵 개시 오프셋을 입력하세요.
검증은 자동으로 수행됩니다. 새로운 오프셋 값이 받아들여지면, 검은색 텍스트로 표시됩니다. 값이 받아들여지지 않으면 오류 메시지가 빨간색 텍스트로 표시되고, 위반된 오프셋 규칙에 대한 정보를 제공합니다.
시작 주소는 짝수여야 합니다.
가상 스테이션 매핑 구성
컨트롤러와 필드버스 마스터에서 가상 스테이션은 서로 간의 필드버스 맵을 교환하여 통신합니다.
하나 이상의 필드버스 맵은 프로세스 데이터 프레임으로 결합되며, 이는 컨트롤러와 필드버스 마스터 사이의 물리적 통신 링크로 전송됩니다.
열 | 기능 |
|---|---|
확인란 | 매핑을 선택하거나 해제합니다. |
가상 스테이션 | 가상 스테이션의 이름입니다. |
필드버스 구성 | 필드버스 맵입니다. |
컨트롤러 오프셋에서/으로 | 프로세스 데이터 프레임 내의 필드버스 맵의 시작점. |
열 | 기능 |
|---|---|
확인란 | 매핑을 선택하거나 해제합니다. |
가상 스테이션 | 가상 스테이션의 이름입니다. |
비주기적 구성 | 비주기적 데이터 맵 |
인스턴스 시작 | 비주기적 데이터의 첫 번째 인스턴스 번호입니다. 기본/최소 인스턴스 번호: 2048. |
인스턴스 종료 | 비주기적 데이터의 마지막 인스턴스 번호입니다. 최대 인스턴스 번호: 65535. 인스턴스의 최대 크기는 필드버스 유형에 따라 다릅니다. |
인스턴스의 개수 | 비 주기적 데이터 전송에 필요한 인스턴스 개수입니다. 예를 들면, 데이터 인스턴스 크기가 64로 설정되고 시작 인스턴스가 2048이고, 종료 인스턴스가 2060인 경우 인스턴스의 개수는 13이며 비주기적 구성을 위한 최대 크기는 832 bytes 입니다. 인스턴스의 개수는 인스턴스 시작 및 인스턴스 종료에 기반하여 자동으로 생성됩니다. |
바이트 크기 | 비주기적 구성의 최대 크기는 선택한 데이터 인스턴스 크기, 인스턴스 시작 및 인스턴스 종료에 따라 다릅니다. |
비주기적 데이터의 총 크기는 65536 bytes를 초과할 수 없습니다.
가상 스테이션은 매핑된 하나의 비주기 필드버스 구성만 갖을 수 있지만, 비주기 필드버스 구성을 많은 가상 스테이션에 매핑할 수 있습니다.
필드버스 매핑 추가하기
공장 구조
에서 컨트롤러를 선택하세요. 필드버스 및 SoftPLC
로 이동하세요.보고서 탭을 선택하세요.
컨트롤러로 또는 컨트롤러에서 및 가상 스테이션 매핑 구성에서 추가를 선택하시면 컨트롤러로 또는 컨트롤러에서 매핑을 추가할 수 있습니다.
필드버스 탭을 선택하시고 드롭-다운 메뉴에서 가상 스테이션 및 필드버스 구성 드롭-다운 메뉴를 선택하세요.
필드버스 신호 구성이 필드 하위-탭에 생성됩니다.
추가를 선택하세요.
필드버스 매핑을 이제 가상 스테이션 매핑 구성에서 볼 수 있습니다.
비주기적 필드버스 매핑 추가하기
공장 구조
에서 컨트롤러를 선택하세요. 필드버스 및 SoftPLC
로 이동하세요.보고서 탭을 선택하세요.
컨트롤러에서 비주기적 데이터를 선택하시고 and 가상 스테이션 매핑 구성에서 추가를 선택하세요.
비주기 필드버스 탭을 선택하시고 드롭-다운 메뉴에서 가상 스테이션 및 비주기 필드버스 구성을 선택하세요.
비주기적 필드버스 구성이 비주기적 하위-탭에 생성됩니다.
추가를 선택하세요.
이제 컨트롤러의 비주기 탭 아래의 가상 스테이션 매핑 구성에 필드버스 매핑을 볼 수 있습니다.
필드버스 맵은 가상 스테이션에서 할당된 순서 또는 필드버스 맵이 들어갈 수 있는 최하위 진입점으로 프로세스 데이터 프레임에 배치됩니다.
시작 및 종료 인스턴스 편집하기
필드버스 매핑을 위한 시작 및 종료 인스턴스를 편집할 수 있습니다.
시작 및 종료 인스턴스는 비주기 필드버스 구성이 시작 및 종료되는 위치를 정의하는 고정 위치들입니다. 정확한 범위 입력이 중요합니다.
가상 스테이션 매핑 구성 필드의 컨트롤러의 비주기 탭을 선택하세요.
필요한 경우, 시작 인스턴스 및 종료 인스턴스 값을 편집하세요.
올바른 값을 입력하지 않은 경우, "필드버스 프레임이 해당 컨텐츠에 일치해야 합니다"라는 경고가 표시됩니다.
가장 낮은/첫 번째 가능한 비주기적 데이터 인스턴스 번호
필드버스 | "컨트롤러로(To Controller)" 인스턴스 번호 | "컨트롤러에서(From Controller)" 인스턴스 번호 |
|---|---|---|
Profinet-IO | 1024 | 2048 |
Profibus-DP | 1024 | 2048 |
이더넷/IP | 32768 | 4096 |
DeviceNet | 1024 | 2048 |
CC-링크 | 지원되지 않음 | 지원되지 않음 |
CC-링크 IE | 1024 | 2048 |
각 조임 후, 구성된 항목의 측정 값은 PLC가 시스템에서 읽을 수 있는 비주기적 데이터로 제공됩니다. 해당 데이터는 각 조임 후 새로운 값으로 업데이트됩니다.
사이클 완료 신호가 높음으로 설정되면 데이터를 읽을 수 있습니다. 데이터는 다음 조임이 시작될 때까지, 즉 입력 신호 시작이 전송될 때까지 유효합니다.
PLC는 모든 데이터를 수집하기 위해 일련의 GET_RECORD 명령어를 출력합니다.
가상 스테이션에 할당된 필드버스 맵 보기
필드버스 맵이 가상 스테이션에 할당되는 방법 보기:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다. 필드버스 및 SoftPLC
탭을 선택한 다음, 개요 하위-탭을 선택합니다.
필드버스 가상 스테이션 매핑 구성 메뉴는 필드버스 맵 목록 및 할당된 가상 스테이션을 표시합니다. 컨트롤러 오프셋으로 열은 필드버스 맵이 시작되는 프로세스 데이터 프레임 주소를 가리킵니다.
필드버스 구성 탭
공장 구조 창
에서 컨트롤러를 선택하세요.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택하세요.필드버스 구성 하위-탭을 선택하면 맵의 목록을 표시하거나 새로운 필드버스 맵이 생성됩니다.
열 | 설명 |
|---|---|
| 확인란. |
이름 | 이름: 맵 이름을 표시합니다. 이름은 수신 맵과 발신 맵 모두 동일합니다. |
도착 크기 | 가상 스테이션의 수신 맵 크기. 값은 짝수 바이트여야 합니다. |
출발 크기 | 가상 스테이션의 발신 맵 크기. 값은 짝수 바이트여야 합니다. |
라이브러리 링크 | 글로벌 라이브러리에 링크됨 - 예/아니요. |
마지막 변경 | 최종 변경으로서, ToolsTalk 2의 시간으로 표현됩니다. |
변경자: | 마지막으로 변경한 사용자를 나타냅니다. |
컨트롤러 업데이트됨 | 컨트롤러 갱신은 컨트롤러 시간으로 표현됨. |
컨트롤러를 업데이트한 사용자: | 컨트롤러를 갱신한 사람을 나타냅니다. |
필드버스 맵 생성, 가져오기 및 삭제
새 필드버스 맵 만들기
공장 구조 창
에서 컨트롤러를 선택하세요.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택하세요.필드버스 구성 하위-탭을 선택하면 맵의 목록이 표시됩니다.
추가를 선택하면 새로운 필드버스 구성이 생성되고 더블 클릭하여 필드버스 구성을 편집할 수 있습니다.
새 필드버스 구성 생성 대화창이 열립니다.
새 탭을 선택하세요.
이름을 사용하여 구성을 실행하세요.
컨트롤러 수신 크기 매개변수를 입력하세요. 이것은 가상 스테이션으로의 데이터 프레임 수신 크기로서 바이트 수로 표현합니다. 이 값은 짝수여야 합니다.
컨트롤러 발신 크기 매개변수를 입력하세요. 이것은 가상 스테이션의 데이터 프레임 발신 크기로서 바이트 수로 표현합니다. 이 값은 짝수여야 합니다.
발신 프레임 및 수신 프레임은 다른 크기를 가질 수 있습니다.
설정에 항목을 추가하여 구성을 계속하시려면 추가를 선택하세요.
입력한 맵 크기는 프로세스 데이터 프레임보다 클 수 없습니다.
필드버스 맵 가져오기
이전에 내보낸 필드버스 맵을 탬플릿으로 재사용하여 컨트롤러로 가져올 수 있습니다.
공장 구조 창
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 구성 하위-탭을 선택하여 맵의 목록을 표시할 수 있습니다.
추가를 선택합니다.
새 필드버스 구성 생성 대화창이 열립니다.
들여오기 탭을 선택하여 기존 맵을 다시 사용할 수 있습니다.
파일 열기 명령 버튼을 선택하여 브라우저 창을 엽니다.
파일을 선택합니다. 파일 유형은 JSON 파일이어야 합니다. *.json
열기를 선택합니다. 브라우저 창이 닫힙니다.
추가를 선택하여 파일을 가져옵니다. 이 작업은 팝업 창을 닫고, 맵 목록을 갱신합니다.
필드버스 맵 삭제
공장 구조 창
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 구성 하위-탭을 선택하여 맵의 목록을 표시할 수 있습니다.
삭제할 각 필드버스 맵을 위해 필드버스 작업 영역 제일 왼쪽에 있는 열의 확인란
을 선택합니다. 관리를 선택한 다음 드롭다운 목록에서 삭제를 선택합니다.
맵 목록이 갱신됩니다.
필드버스 신호 구성 생성
이 영역에서 컨트롤러 또는 컨트롤러로 새로운 필드버스 신호 구성을 생성할 수 있습니다.
공장 구조 창
에서 컨트롤러를 선택하세요.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택하세요.필드버스 하위-탭을 선택하여 맵의 목록을 표시할 수 있습니다.
맵 이름을 더블 클릭하여 해당 맵을 보거나, 추가를 선택하여 새로운 맵을 만들 수 있습니다.
작업 영역 구성 메뉴를 보여줍니다.
필드버스 구성 메뉴에서 컨트롤러로 또는 컨트롤러에서 탭을 선택하세요.
추가를 선택하세요.
신호 구성 생성 대화창이 나타납니다.
목록에서 항목 이름을 클릭하면 해당 항목이 선택됩니다.
최하위 비트가 위치한 곳에 바이트 수를 입력하여 항목 시작 위치를 설정하세요.
최하위 비트가 위치한 곳에 비트 수를 입력하여 항목 시작 위치를 설정하세요.
비트 수로 표현된 항목의 길이를 설정하세요.
드롭다운 메뉴에서 선택 사항인 변환기의 값을 선택하세요.
추가를 선택하세요.
추가되는 모든 항목에 6-11 단계를 반복해 주세요.
추가 작업을 종료하고 대화 창을 닫기 위해 닫기를 클릭하세요.
항목이 맵에 수동으로 배치되지 않은 경우 ToolsTalk 2는 가장 낮은 위치에 항목을 배치하려고 시도합니다. 나중에 맵 내에서 항목을 이동하는 것이 가능합니다.
필드버스 구성 매개변수
아이템은 최하위 비트의 위치를정의하여 필드버스 맵에 배치됩니다. 이 위치는 바이트 수와 비트 수에 의해 식별됩니다.
정보 | 설명 |
|---|---|
시작 바이트 | 최하위 항목이 위치한 바이트 수. 0 ~ 크기에서 1을 뺀 범위 내의 숫자입니다. 넘버링은 0에서 시작합니다. 최하위 바이트 또는 비트는 0입니다. |
시작 비트 | 최하위 항목이 위치한 비트 수. 이전에 선택한 시작 바이트에서 시작합니다. 0 ~ 7 범위 내의 숫자입니다. 넘버링은 0에서 시작합니다. 최하위 바이트 또는 비트는 0입니다. |
길이 | 항목에 있는 비트 수를 나타내는 수치. |
범위 | 정보만을 위한 용도입니다. 선택된 항목의 최소 길이, 최대 길이, 기본 길이 정보를 제공합니다. |
변환기 | 사용 가능한 신호 변환기의 드롭다운 목록. SoftPLC가 항목을 디지털 형식으로 표시되는 방법에 대한 요구 사항이 있는 경우에 사용됩니다. |
아이템 변환기는 다른 데이터 유형 간에 항목을 변환합니다.
정보 | 설명 |
|---|---|
부울 반전 | 디지털 신호를 액티브 하이(1)에서 액티브 로우(0)로 반전합니다. |
고정점 |
|
비동기 데이터
비동기 데이터는 조임 결과와 같은 비주기적 데이터를 프로세스 데이터에 전송해야할 때 사용됩니다.
PF에 대한 필드버스 비동기 데이터 신호 및 PF의 필드버스 비동기 데이터 신호의 경우, 필드버스 맵에 추가된 후 가상 스테이션에 매핑되며, 비동기 데이터가 활성화되고, 비주기 결과 구성이 동일한 가상 스테이션에 매핑된 다음, 결과는 비동기 데이터로 출력되고 비주기 데이터로 출력되지 않습니다.
비동기 데이터로 표시되는 조임 결과
다음 섹션은 PF로 전송되는 필드버스 비동기 데이터 I/O 신호 및 PF에서 전송하는 필드버스 비동기 데이터 I/O 신호가 사용될 때, 비동기 데이터를 사용하여 필드버스 마스터와 컨트롤러 간의 통신의 예를 제공합니다.
조임이 완료되면, 필드 버스 마스터는 사이클 완료 신호를 수신하고 조임 후 사이클 완료 신호를 수신하면 조임 결과를 패치할 준비가 됩니다.
필드버스 마스터는 PF로 전송되는 필드버스 비동기 데이터 I/O 신호를 전송하여, 컨트롤러가 읽은 결과 데이터의 첫 번째 패키지를 요청합니다.
컨트롤러는 조임 결과의 하위 패키지를 사용하여 PF에서 전송하는 필드버스 비동기 데이터 I/O 신호 107로 응답합니다.
컨트롤러의 조임 결과는 필드버스 프레임의 최대 크기보다 클 수 없습니다.
필드버스 마스터가 첫 번째 패키지 읽기를 마치면, PF로 전송되는 필드버스 비동기 데이터 명령이 0으로 설정되어 첫 번째 하위 메시지가 수신되고 읽혔음을 나타냅니다.
컨트롤러는 PF에서 전송하는 필드버스 비동기 데이터 확인 메시지를 사용하여 새로운 하위 패키지 조임 결과를 다시 요청할 수 있다는 내용으로 응답합니다.
필드버스 마스터는 데이터 프레임을 읽었으나 시퀀스 번호가 부정되는 경우, 요청된 하위 패키지가 마지막 대기열에 있음을 표시합니다.
필드버스 마스터는 조임 결과를 요청했으나 대기열이 비어 있는 경우, 컨트롤러는 빈 데이터 프레임으로 응답합니다.
비동기 데이터 구성
공장 구조 창
에서 컨트롤러를 선택하세요.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 하위-탭을 선택하여 맵의 목록을 표시할 수 있습니다.
맵 이름을 더블 클릭하여 해당 맵을 보거나. 추가를 선택하여 새로운 맵을 만들 수 있습니다.
작업 영역 구성 메뉴를 보여줍니다.
필드버스 구성 메뉴에서 컨트롤러로 또는 컨트롤러에서 탭을 선택합니다.
추가를 선택합니다.
신호 구성 생성 대화창이 나타납니다.
컨트롤러로(To Controller) 탭이 선택된 경우 PF로 전송되는 필드버스 비동기 데이터를 선택하시고 컨트롤러에서(From Controller) 탭이 연결된 경우 PF에서 전송하는 필드버스 비동기 데이터를 선택하세요.
최하위 BIT가 있는 위치에 BYTE 수를 입력하세요.
최하위 비트가 위치한 곳에 비트 수를 입력하여 항목 시작 위치를 설정하세요.
비트 수로 표현된 항목의 길이를 설정하세요.
추가 작업을 종료하고 대화 창을 닫기 위해 닫기를 클릭하세요.
필드버스 구성 및 필드버스 맵의 이해
필드버스 구성 메뉴에서 필드버스 맵을 편집할 수 있습니다. 맵 내에서 항목을 추가, 삭제, 이동할 수 있습니다.
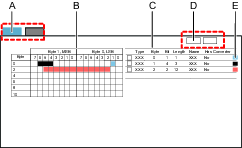
A | 탭. 수신 또는 발신 맵 맵을 선택함 | B | 맵은 항목이 배치되는 방법을 그래픽 형식으로 표시함 |
C | 맵은 항목이 배치되는 방법을 표시함 | D | 맵에서 항목을 추가 또는 삭제하는 명령 단추 |
E | 항목 위치에 대한 색 코딩의 예 |
행을 목록에서 선택하면 항목이 목록 및 맵에 강조 표시됩니다.
항목이 맵에서 선택되면 맵과 목록에서 강조 표시됩니다.
항목은 한 비트를 차지하거나 여러 비트를 통해 확장될 수 있습니다. 항목 위치는 항상 최하위 비트의 시작 위치로 설명됩니다. 시작 위치는 바이트와 비트를 가리킵니다. 길이 매개변수는 항목이 오른쪽에서 왼쪽으로 확장되는 정도를 나타냅니다.
팝업 창에서 항목을 추가하거나 편집합니다.
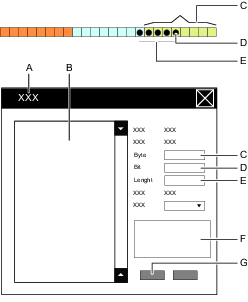
A | 항목 추가 또는 항목 편집 팝업 창 맵 | B | 사용 가능한 항목 목록 |
C | 바이트 위치 | D | 비트 위치 |
E | 항목 길이 매개변수 필드 | F | 아이템 정보 필드 |
G | 명령 버튼 |
프로세스 데이터 프레임의 필드버스 맵 자동 배치
가상 스테이션에 할당될 때 필드버스 맵은 프로세스 데이터 프레임에 자동으로 배치됩니다. 필드버스 및 SoftPLC 탭의 필드버스 가상 스테이션 매핑 구성 메뉴에서 오프셋 위치를 편집하여 나중에 순서를 변경할 수 있습니다.
사용 방법:
필드버스 맵은 프로세스 데이터 프레임에 할당되는 순서로 배치됩니다.
각 맵은 프레임의 시작에서 오프셋 값으로 시작합니다.
이전 맵 위 또는 첫 맵에서 제로 오프셋인 최하위 위치에 맵이 배치됩니다.
맵을 프로세스 데이터 프레임에서 삭제한 경우, 간격이 생깁니다. 새로운 맵이 가상 스테이션에 할당될 때, 배치 규칙은 간격 메우기를 시도할 것입니다.
맵이 기존 맵 사이에 맞지 않으면, 어레이의 다음 무료 위치가 시도됩니다.
오프셋 값은 설정 창에서 수동으로 변경될 수 있습니다. 필드버스 맵이 중복되지 않도록 주의해야 합니다.
ToolsTalk 2가 배치 규칙에 대한 위반 사항을 발견하면, 오류 표시기 가 오프셋 매개변수 옆에 표시됩니다. 맵이 중첩되거나 경계 밖에 있음을 나타냅니다. 오프셋 값을 변경함으로써 수정할 수 있습니다.
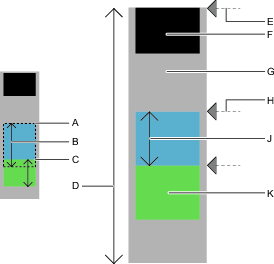
A | 프로세스 데이터 프레임 내의 첫째 필드버스 맵 시작 위치. 오프셋 = 제로 |
B | 프로세스 데이터 프레임 내의 필드버스 맵 시작 위치로서 PDF 시작의 오프셋으로 표현됨 |
C | 필드버스 맵의 크기 |
D | 필드버스 맵 |
E | 프로세스 데이터 프레임의 크기 |
F | 오류의 예: 청색 맵이 “녹색” 맵의 시작 위치와 중첩됨 |
G | Map size (맵의 크기) |
H | “청색” 맵의 시작 위치 |
J | 프로세스 데이터 프레임 |
K | 프로세스 데이터 프레임의 첫 번째 맵으로서 오프셋 주소가 0임 |
필드버스 맵에 있는 항목의 자동 배치
항목은 필드버스 맵에 자동으로 배치됩니다. 필드버스 창을 편집하여 나중에 순서를 변경할 수 있습니다.
사용 방법:
항목은 필드버스 및 SoftPLC
의 필드버스 가상 스테이션 구성 메뉴 내의 필드버스 맵에 추가된 순서로 배치됩니다.항목은 바이트, 비트, 길이 위치를 기준으로 최하위 위치에 배치됩니다.
항목이 기존 항목 사이에 맞지 않으면 어레이의 다음 무료 위치가 시도됩니다.
항목이 필드버스 맵에서 삭제된 경우, 간격이 생깁니다. 새로운 항목이 추가되면, 배치 알고리즘은 그 간격을 채우려고 시도할 것입니다.
ToolsTalk 2는 배치 규칙의 모든 위반을 감지합니다. 오류 표시
가 나타나고 오류 위치를 나타냅니다. 오류 표시기 위에 마우스커서를 놓으면 규칙 위반에 대한 자세한 정보가 표시됩니다.
필드버스 맵에서 항목 편집 또는 보기
공장 구조 창
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 하위-탭을 선택하여 맵의 목록을 표시할 수 있습니다.
선택한 맵의 이름을 두 번 클릭합니다.
작업 영역 구성 메뉴를 보여줍니다.
필드버스 구성 메뉴에서 컨트롤러로 탭 또는 컨트롤러에서 탭을 선택합니다.
필드버스 구성 메뉴 안의 맵 테이블에서 항목 이름을 두 번 클릭합니다.
항목 편집 대화 창이 열립니다.
최하위 비트가 위치한 곳에 바이트 수를 입력하여 항목 시작 위치를 편집합니다.
최하위 비트가 위치한 곳에 비트 수를 입력하여 항목 시작 위치를 편집합니다.
비트 수로 표현된 항목의 길이를 편집합니다.
드롭다운 메뉴에서 선택 사항인 변환기 값을 편집합니다.
변경 사항을 확인하고 대화 창을 닫으려면 확인을 클릭합니다.
필드버스 구성 메뉴는 맵과 테이블에 갱신됩니다.
필드버스 맵에서 항목 삭제하기
공장 구조 창
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 하위탭을 택하여 맵 목록을 표시합니다.
선택한 맵의 이름을 두 번 클릭합니다.
작업 영역 구성 메뉴를 보여줍니다.
필드버스 구성 메뉴에서 컨트롤러로 또는 컨트롤러에서 탭을 선택합니다.
맵에서 삭제할 각 항목에 대하여 필드버스 구성 메뉴 항목의 가장 왼쪽에 있는 확인란
을 선택합니다.삭제를 선택합니다.
필드버스 구성 메뉴는 맵과 테이블에 갱신됩니다.
필드버스 맵 내보내기
필드버스 맵은 가상 스테이션 및 원격 위치 사이에서 사용되는 통신 프레임에 신호 아이템이 배치되는 방법을 정의합니다. 이 맵은 템플릿으로 내보낼 수 있으며, 다른 컨트롤러가 가져오고 다시 사용할 수 있습니다.
공장 구조 창
에서 컨트롤러를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
탭을 선택합니다.필드버스 하위-탭을 선택하여 작업영역과 맵 목록을 표시합니다.
내보낼 필드버스 맵을 위해 필드버스 작업 영역 제일 왼쪽 열에 있는 확인란
을 선택하고 드롭다운 목록에서 관리 내보내기를 차례대로 선택합니다.원하는 위치로 이동하고 저장을 선택합니다.
맵은 JSON 파일 (*.json)로 저장됩니다. 내보낸 파일은 다른 컨트롤러로 가져올 수 있습니다.
비주기 필드버스 구성 작업
조임 결과의 일부 결과는 비주기 데이터로 전송됩니다. IO 신호 사이클_완료는 일반적으로 PLC 프로그래머에 의해 비주기 데이터가 패치될 준비가 되었다는 것을 나타냅니다.
아래 섹션은 비 순환 데이터를 구성하는 방법을 설명합니다.
비주기 데이터 구성 개요
비주기 데이터 구성 영역에서, 새로운 비주기 데이터 구성을 추가할 수 있으며, 일단 추가되면 다른 비주기 데이터 구성이 목록으로 표시됩니다.
공장 구조
에서 컨트롤러를 선택합니다. 필드버스 및 SoftPLC 탭을 선택합니다.
.비주기 하위-탭을 선택합니다.
열이 포함하는 정보:
열 | 설명 |
|---|---|
이름 | 가상 스테이션 매핑에서 선택 가능한 구성의 이름입니다. |
|
다음으로 채널을 선택하십시오. | 볼트 또는 채널. 이 값은 각 구성 결과 항목의 식별자가 볼트 또는 채널인지를 정의합니다. |
데이터 레이아웃 | 압축 또는 고정 |
마지막 변경 | ToolsTalk 2 시간으로 표현됩니다. |
마지막 변경자 | <사용자>가 마지막으로 변경한 구성 데이터. |
컨트롤러 업데이트됨 | 컨트롤러 시간으로 표현됩니다. |
컨트롤러를 업데이트한 사용자 | <사용자>가 갱신한 컨트롤러. |
새 비주기 데이터 구성 추가하기
공장 구조
에서 컨트롤러를 선택합니다. 필드버스 및 SoftPLC 탭
으로 이동합니다.비주기 하위-탭을 선택합니다.
추가츨 선택하고 새 비주기 데이터 구성 만들기 창에서 새로 만들기를 선택합니다.
비주기 데이터 구성 이름을 입력하고 추가를 선택합니다.
새롭게 만들어진 구성에 대한 속성 하위-탭이 열립니다.
새 비주기 데이터 구성이 가능한 가장 낮은 위치에 추가되고 목록이 업데이트됩니다.
비주기 데이터 구성 메뉴
비주기 탭에서 비주기 데이터 구성 메뉴를 더블 클릭하여 비주기 데이터 구성 메뉴를 엽니다.
속성 메뉴
매개변수 이름 | 설명 |
|---|---|
이름 | 가상 스테이션 매핑에서 선택 가능한 구성의 이름입니다. |
최대 크기 | 이 값은 가상 스테이션에 매핑될 떄까지 수동으로 설정됩니다. 이 값은 매핑에서 선택한 인스턴스 내에 구성이 들어 맞게 해줍니다. 이 값은 데이터 레코드 크기에 따라 필요한 인스턴스 수로 계산됩니다. |
첫 번째 채널 또는 볼트 오프셋. | 첫 번째 채널 또는 볼트 오프셋의 주소. 이는 공통 영역의 크기를 정의합니다. |
볼트 또는 채널 탬플릿 크기 | 볼트의 크기 또는 채널 |
다음으로 채널을 선택하십시오. | 볼트 또는 채널. 이 값은 각 구성 결과 항목의 식별자가 볼트 또는 채널인지를 정의합니다. |
데이터 레이아웃 | 다음을 선택하십시오.
|
헤더 추가 | 확인란을 선택하여 비주기 구성 결과에 헤더를 추가해야 함을 반드시 나타내야 합니다. 확인란이 선택되면, 사용법에 따라 오프셋이 6바이트 이하 또는 이상으로 업데이트됩니다. 이는 또한 그래픽으로도 볼 수 있습니다. 사용 가능한 공간이 있는 경우에만 헤더를 추가할 수 있습니다. 공통 영역에 항목이 추가되고 헤더를 위한 공간이 없으면, 비활성화됩니다. 압축 데이터 레이아웃을 선택한 경우, 비주기 데이터 페이로드의 길이를 알기위해 헤더를 사용하는 것이 좋습니다. |
비기존 값 | 구성이 조임 결과 또는 다단계 구성에 없는 데이터를 원하는 경우, 다른 데이터 유형에 대해 비기존 값이 사용됩니다. 새로운 비주기 필드버스가 생성되면 컨트롤러에서 값이 자동으로 설정됩니다. |
비주기 데이터 구성
비주기 데이터 구성 영역에는 최대 크기, 오프셋 및 템플릿 크기로 설정된 비주기 구성의 시각화가 표시됩니다. 모든 구성은 바이트 수준입니다.
항목이 공통, 볼트 또는 채널 영역에 추가되면, 왼쪽에 표시되는 비주기 데이터 프레임이 변경됩니다.
오프셋 및 템플릿 크기 값이 0이면 공통, 볼트 도는 채널 영역이 회색으로 표시되고 편집할 수 없습니다.
공통 영역의 데이터
공통 영역에는 전역 데이터가 포함되며 동일한 스테이션의 모든 스핀들에 적용될 수 있습니다. 공통 영역 데이터는 헤더 뒤와 볼트/채널 데이터 앞에 표시됩니다.
볼트 또는 채널 데이터
볼트 또는 채널 영역의 데이터는 선택한 볼트 또는 채널에 고유하며 볼트 또는 채널 영역의 데이터 레이아웃은 선택한 데이터 레이아웃에 따라 다릅니다.
공통 영역 개요
첫 번째로 사용된 영역에는 다음 항목이 포합됩니다.
다단계 조임 결과
배치 시퀀스 결과
결과 알림
이러한 항목은 볼트 또는 채널에만 지정된 것이 아니고 "공통"이며 다음 매개변수를 포함합니다.
매개변수 이름 | 설명 |
|---|---|
유형 | 각 항목의 값 유형 예: 배치 시퀀스 결과 값, 결과 알림 또는 여러개의 조임 결과 값. |
오프셋 | 비주기 데이터 프레임이 있는 바이트 배열의 항목 위치는 바이트로 정의됩니다. |
크기 | 바이트 크기 데이터 유형이 문자열인 경우 수동으로 구성할 수 있습니다 데이터 유형이 문자열이 아닌 경우 데이터 유형에 따라 값이 자동으로 설정됩니다. |
데이터 유형 | 데이터 유형 값. 예: 문자열, Int8, Int16 등 |
이름 | 항목 이름. 편집할 수 없음. |
공통 영역에서 비주기 결과 구성 추가하기
공통 영역에서 추가를 선택합니다.
비주기 결과 구성 창이 열립니다.
다중 조임에서 매개변수를 선택하고, 결과 알림 또는 배치 시퀀스 드롭-다운 메뉴를 선택합니다.
출력 데이터 유형을 선택하고 출력 데이터 유형이 문자열로 선택된 경우, 오프셋 값과 크기를 선택합니다.
추가를 선택한 다음, 닫기를 선택합니다.
공통 영역에서 비주기 결과 구성 삭제하기
공통 영역에서 삭제해야할 구성의 확인란을 선택합니다.
삭제를 선택합니다.
볼트 또는 채널 영역 개요
볼트 또는 채널 구성 영역에서, 볼트 또는 채널에 대해 다음 유형의 비주기 데이터 항목을 구성 할 수 있습니다.
다단계 조임
프로그램 모니터
프로그램 제한
단계 모니터
단계 제한
매개변수 이름 | 설명 |
|---|---|
유형 | 각 항목의 값 유형 예: 다단계 조임, 프로그램 모니터, 프로그램 제한, 단계 모니터 또는 단계 제한. |
오프셋 | 비주기 데이터 프레임에 있는 항목 위치는 바이트로 정의됩니다. |
크기 | 바이트 크기 데이터 유형이 문자열인 경우 수동으로 구성할 수 있습니다 데이터 유형이 문자열이 아닌 경우 데이터 유형에 따라 값이 자동으로 설정됩니다. |
데이터 유형 | 데이터 유형 값. 예: 문자열, Int8, Int16 등 |
이름 | 항목 이름. 편집할 수 없음. |
식별자 | 볼트의 ID 또는 선택한 채널을 설정합니다. |
볼트 또는 채널 영역에서 비주기 결과 구성 추가하기
볼트 또는 채널 영역에서 추가를 선택하세요.
비주기 결과 구성 창이 열립니다.
다단계 조임, 프로그램 모니터, 프로그램 제한, 단계 모니터 또는단계 제한 드롭-다운 메뉴에서 매개변수를 선택하세요.
출력 데이터 유형을 선택하세요. 출력 데이터 유형이 문자열로 선택된 경우, 오프셋 값, 식별자 및 크기를 입력하세요.
단계 모니터 및 단계 제한의 경우, 단계 카테고리를 선택하고 부드러운 시동, 런다운, 시작 및 종료 중에서 선택해 주세요.
단계 번호 대신 표시할 단계 카테고리 결과를 표시해 주세요.
동일한 단계 카테고리를 가진 여러 단계가 있는 경우, 단계 카테고리 선택기 드롭 다운 메뉴에서 마지막으로 실행된 단계 또는 프로그램의 마지막 단계(순서 번호가 더 높은 단계)를 표시하도록 선택할 수 있습니다.
추가를 선택하신 다음, 닫기를 선택하세요.
볼트 또는 채널 영역에서 복사본 만들기
볼트 또는 채널 영역에서 복사본 만들기 탭을 사용하여 많은 볼트 또는 채널을 한 번에 추가할 수 있습니다.
복사할 ID 확인란을 선택하고 복사본 만들기를 선택합니다.
볼트의 복사본 또는 채널 만들기 창이 열립니다.
복사본 수 필드에, 복사본의 수를 입력합니다.
복사본을 만들 공간이 없는 경우 "현재 구성의 공간에 복사본의 수를 만들 충분한 공간이 없습니다"라는 경고가 표시됩니다.
복사본 만들기를 선택한 다음 닫기를 선택합니다.
순서 식별자 번호가 있는 복사본 목록을 이제 볼 수 있습니다. 복사된 ID의 값은 항상 이미 존재하는 가장 큰 숫자 다음 숫자입니다. 예를 들어, 이미 존재하는 ID의 값이 2, 5 및 6이 이미 존재하고, 값 2의 ID가 복사되었다면, 새 ID의 값은 7입니다. 매개변수를 더블 클릭하여 값을 변경합니다.
볼트 또는 채널 영역에서 비주기 결과 구성 삭제하기
ID의 확인란을 선택하여 해당 ID 아래의 모든 구성을 삭제하거나 개별 구성을 삭제하려면, 볼트 또는 채널 영역의 구성 옆의 확인란을 선택합니다.
삭제를 선택합니다.
조임 결과의 예
이 필드 버스 맵에서, 조임 결과 데이터는 레코드 번호 2048에서 시작하며 각 레코드는 64 bytes입니다. 헤더를 포함한 조임 데이터의 최대 크기는 최대 64개의 채널에 맞추기 위해 646 bytes로 설정됩니다.
데이터 | 데이터 유형 | 프레임에서의 위치 | 바이트 | |
|---|---|---|---|---|
a 데이터 일부의 길이와 헤더의 시퀀스 및 길이, 즉 데이터의 길이에 4 bytes를 더한 값 | ||||
상태 | 정수 | 헤더 | 0-1 | |
시퀀스 | 정수 | 헤더 | 2-3 | |
데이터 길이a | 정수 | 헤더 | 4-5 | |
볼트 번호 채널 1 | 정수 | 데이터 | 6-7 | |
최종 토크 채널 1 | 실수 | 데이터 | 8-11 | |
최종 각도 채널 1 | 실수 | 데이터 | 12-15 | |
볼트 번호 채널 2 | 정수 | 데이터 | 16-17 | |
최종 토크 채널 2 | 실수 | 데이터 | 18-21 | |
최종 각도 채널 2 ....................................... | 실수 | 데이터 | 22-25 | |
볼트 번호 채널 64 | 정수 | 데이터 | 636-637 | |
최종 토크 채널 64 | 실수 | 데이터 | 638-641 | |
최종 각도 채널 64 | 실수 | 데이터 | 642-654 | |
헤더 필드의 기능
신호 | 데이터 유형 | 설명 |
|---|---|---|
상태 | 정수 | 향후 사용을 위해 추가되었으며 현재는 항상 0x8100 |
시퀀스 | 정수 | 항상 -1 |
데이터 길이 | 정수 | 데이터 일부의 길이와 헤더의 시퀀스 및 길이, 예를 들면 데이터의 길이에 4 bytes를 더한 값 |
데이터 필드의 기능
신호 | 데이터 유형 | 설명 |
|---|---|---|
볼트 번호 채널 X | 정수 | 조임에 사용된 동기화 모드의 구성에 기초한 채널의 볼트 번호입니다. 조임에 포함되지 않은 채널의 경우, 볼트 번호는 0으로 설정됩니다. |
최종 토크 채널 X | 실수 | 채널 조임 결과의 최종 토크 값 값은 항상 Nm 단위로 전송됩니다. 조임에 포함되지 않았거나 최종 토크 값을 생성하지 않은 채널의 경우 0x7F820000으로 설정됩니다 |
최종 각도 채널 X | 실수 | 채널 조임 결과의 최종 각도 값 해당 값은 항상 단위로 전송됩니다. 조임에 포함되지 않았거나 최종 토크 값을 생성하지 않은 채널의 경우 0x7F820000으로 설정됩니다 |
최종 토크 및 최종 각도 값은 ISO/IEC/IEEE60559:2011에 따라 부동 소수점 binary32로 전송됩니다. 데이터는 네트워크 순서(빅 엔디안)로 전송됩니다. 값을 전송할 수 없는 경우 특수 값 0x7F820000이 전송됩니다. 부동 소수점 번호로 해석되면, NaN(숫자가 아님)에 해당합니다.
정수 값은 부호가 있는 16 비트 정수로 전송됩니다. 예: 유효한 범위는 -32768~32767 입니다.
예를 들어, 채널 1과 채널 3을 사용하여 조임을 실행한 경우 다음과 같은 조임 데이터가 생성됩니다.
채널 1
볼트 번호 1
최종 토크 10.23 Nm
최종 각도 341.4°
채널 3
볼트 번호 5
최종 토크 10.32 Nm
최종 각도는 생성되지 않음
조임 데이터는 다음과 같이 인스턴스 번호 2048로 전송됩니다.
바이트 | 필드 | 값 | 주석 |
|---|---|---|---|
0-1 | 상태 | 0X8100 | 항상 0X8100 |
2-3 | 시퀀스 | -1 | 항상 -1 |
4-5 | 길이 | 34 | 34 bytes, 3 채널용 데이터 + 길이 및 시퀀스 번호 |
6-7 | 볼트 번호 채널 1 | 1 | |
8 - 11 | 최종 토크 채널 1 | 10.23 | 10.23 Nm |
12-15 | 최종 각도 채널 1 | 341.4 | 341.4° |
16-17 | 볼트 번호 채널 2 | 0 | 조임에 포함되지 않음 |
18-21 | 최종 토크 채널 2 | 0x7F820000 | 사용 가능한 토크 값 없음 |
22-25 | 최종 각도 채널 2 | 0x7F820000 | 사용 가능한 각도 값 없음 |
26-27 | 볼트 번호 채널 3 | 5 | |
28-31 | 최종 토크 채널 3 | 10.32 | 10.32Nm |
32-35 | 최종 각도 채널 3 | 0x7F820000 | 사용 가능한 각도 값 없음 |
SoftPLC 구성 탭
SoftPLC 개요
SoftPLC는 PF6/PFFlex 동작을 사용자화 하고, 필드버스 데이터 발신 및 수신 또는 외부 SoftPLC로부터 I/O 신호를 교환하는 작업에 사용됩니다. 외부 SoftPLC는 조립 라인 기계의 제어에 사용됩니다. 구성 및 프로그램은 자체 프로세스에서 실행하지만 ToolsTalk 2와 통합되어 있고, MultiProg라는 타사 소프트웨어를 통해 이루어집니다. SoftPLC는 필드버스 및 SoftPLC 탭 에서 찾을 수 있으며 라이선스 및/또는 포함된 기능을 통해 이 기능을 지원하는 컨트롤러에 대해서 표시됩니다.
적은 반응 조임 전략 및 컨트롤러 전반의 기능과 같은 컨트롤러 기능들은 기능 관리 시스템(FMS)을 통해 배포된 라이선스가 필요합니다. 특정 라이선스 없이 기능의 구성이 가능하지만, 이러한 기능들을 할당하고 사용하려면 올바른 라이선스를 컨트롤러에 설치해야 합니다. 라이선스에 대한 자세한 내용은 라이선스(FMS)를 참조하십시오.
PLC 신호 구성 생성하기
부속품과 SoftPLC 사이의 상호 작용은 I/O 신호 교환을 통해 이루어집니다.
SoftPLC 신호 구성 필드에서 추가를 선택하면 이 컨트롤러에 연결된 모든 지원되는 I/O 신호가 있는 목록을 볼 수 있습니다.
SoftPLC 신호 구성에서 제외하기 위해 관련성 없는 신호를 지워주세요. (모든 신호는 기본적으로 선택됨)
신호 구성 목록의 이름을 지정해 주세요.
가상 스테이션에 신호 구성을 매핑할 때, 생성된 신호 구성은 드롭다운 목록에서 선택 가능한 옵션으로 사용할 수 있습니다.
신호 구성에 포함되지 않은(체크되지 않은) 신호는 여전히 SoftPLC 구성자 Multiprog에 표시되지만 줄이 그어져 있습니다.
SoftPLC 가상 스테이션 매핑 구성
새 SoftPLC 매핑 만들기
SoftPLC 가상 스테이션 매핑 구성에서 추가를 선택하세요.
새 SoftPLC 매핑 창의 드롭 다운 메뉴에서 필요한 가상 스테이션 및 SoftPLC 신호 구성을 선택하세요.
동일한 SoftPLC 신호 구성은 복수의 가상 스테이션에 사용될 수 있습니다.
각 가상 스테이션은 한 개의 SoftPLC 신호 구성을 사용할 수 있습니다. 가상 스테이션이 특정 신호 구성으로 매핑될 때, 새 SoftPLC 매핑 시 드롭-다운 메뉴에서 이를 더 이상 사용할 수 없습니다. 사용 가능하게 하려면 해당 가상 스테이션에 대한 기존 매핑을 삭제해 주세요.
SoftPLC 인덱스 SoftPLC 환경 내의 순서화된 인덱스에서 특정 가상 스테이션을 컨트롤러에 연결합니다. SoftPLC가 가상 스테이션 2를 참조할 경우, 이 매핑은 현재 번호 2인 가상 스테이션을 정확하게 SoftPLC에 알려줍니다.
SoftPLC 프로젝트 내 SoftPLC 신호 구성 또는 SoftPLC 매핑의 변경 사항을 보려면 프로젝트 가상 스테이션 업데이트를 선택하세요. ToolsTalk 2는 업데이트할 때 Multiprog SoftPLC 프로젝트에서 변수를 삭제하지 않으며, 추가 및 수정 시에만 이렇게 합니다. 이 때문에 업데이트하기 전에 가상 스테이션의 전역 변수 또는 e Multiprog 내의 필드버스를 삭제하는 것을 권장합니다.
SoftPLC 매핑 삭제
해당 확인란을 표시하여 가상 스테이션 신호 구성 매핑을 선택하세요. 삭제를 선택하세요.
새 SoftPLC 프로젝트 만들기
새 SoftPLC 신호 구성을 생성하세요.
SoftPLC 신호 구성을 가상 스테이션에 할당하세요.
일반 SoftPLC 설정에서 SoftPLC 켜짐을 선택하세요.
새로 만들기를 선택하시면 Multiprog가 자동으로 열리면서 새로운 SoftPLC 프로젝트를 생성합니다.
이 프로젝트는 기본 템플릿을 사용하며 이 템플릿에는 Multiprog에서 사용할 수 있는 모든 기능이 포함되어 있습니다.
프로젝트가 생성되고 문서> Mp 온도에 저장될 때마다 생성 및 편집된 프로젝트가 계속 로컬 디스크에 저장됩니다. ToolsTalk 2 SoftPLC 시작에서, 열기를 선택하면 SoftPLC 프로젝트가 ToolsTalk 2 서버에 저장되지 않은 경우에 이 저장된 데이터 프로젝트가 사용됩니다.
Multiprog의 SoftPLC 프로그램을 편집하고 프로젝트에 대하여 ToolsTalk 2의 이름 및 설명을 제공하세요.
프로젝트 가상 스테이션 필드에서 업데이트를 선택하여 I/O 신호 구성을 포함하는 가상 스테이션 매핑을 추가하세요.
SoftPLC 프레임 크기 필드에서 업데이트를 선택하여 필드버스 데이터를 추가하세요.
SoftPLC로부터 필드버스 데이터를 송수신할 수 있기 위해 필드버스 프레임 크기는 특수한 SoftPLC 입력/출력 부분을 포함하도록 구성되어야 합니다.
ToolsTalk 2 서버에서 편집된 프로젝트를 확인하시려면 저장을 클릭하세요.
컨트롤러로 변경 사항을 푸시하세요.
SoftPLC 프로젝트 삭제
프로젝트 삭제
프로젝트 영역에서 삭제를 선택하세요. 대화 창에서 삭제를 다시 선택하시고 확인하세요.
SoftPLC 사용자 데이터 생성
통합을 구현하면 SoftPLC와 OpenProtocol 어댑터 간에 매핑된 공유 메모리를 확보하여 최대 6개의 가상 스테이션을 지원받을 수 있습니다. 가상 스테이션은 SoftPLC로 전송하는 데이터에 100 바이트를 할당하고 SoftPLC에서 전송하는 데이터에 대해 100 바이트를 할당합니다. 총 600 bytes가 양방향으로 모두 매핑됩니다.
SoftPLC는 공유 메모리의 전용 부분을 통해 프로토콜 어댑터와 상호작용할 수 있습니다.
일반 SoftPLC 설정 필드에서 추가를 선택하세요.
SoftPLC 사용자 데이터 생성 창에서, 드롭다운 목록의 관련 프로토콜을 선택하세요.
SoftPLC로 및 SoftPLC에서 주소 필드를 시작 주소를 0으로 입력하시고 종료 주소를 599로 입력하세요.
추가를 선택하세요.
Multiprog 소프트웨어의 전역_변수* 섹션에는 다음 주소를 갖는 각 스테이션에 대한 출력 변수(opOUT_VSX) 및 입력 변수(opIN_VSX)가 포함됩니다.
가상 스테이션
SoftPLC로 전송되는 오픈 프로토콜 사용자 데이터
SoftPLC에서 전송하는 오픈 프로토콜 사용자 데이터
가상 스테이션 1
%MB3.38400
%MB3.40448
가상 스테이션 2
%MB3.38500
%MB3.40548
가상 스테이션 3
%MB3.38600
%MB3.40648
가상 스테이션 4
%MB3.38700
%MB3.40748
가상 스테이션 5
%MB3.38800
%MB3.40848
가상 스테이션 6
%MB3.38900
%MB3.40948
위의 주소로 사전에 설정되지 않은 프로젝트를 가져오거나 업데이트하는 경우, Multiprog에서 수동으로 추가해야 합니다.
SoftPLC 켜짐 또는 꺼짐을 선택합니다.
켜짐: SoftPLC 프로세스가 손실될 경우 공구는 모든 조임을 수행하지 못하도록 잠깁니다.
꺼짐: SoftPLC 프로세스가 손실될 경우에도 공구는 여전히 모든 조임을 수행할 수 있습니다.
컨트롤러에서 오픈 프로토콜 작업을 수행하세요.
컨트롤러로 변경 사항을 푸시하세요.
SoftPLC 통신 설정
오픈 프로토콜 클라이언트에서, MID0241로 사용자 데이터를 구독해 주세요.
컨트롤러는 MID0005를 오픈 프로토콜 클라이언트로 전송하여 명령을 수락합니다.
오픈 프로토콜 클라이언트는 MID0240을 사용하여 컨트롤러에서 사용자 데이터를 다운로드합니다.
컨트롤러는 MID0005를 오픈 프로토콜 클라이언트로 전송하여 명령을 수락합니다.
컨트롤러는 MID0242를 사용하여 오픈 프로토콜 클라이언트로 데이터를 전송합니다.
오픈 프로토콜 클라이언트는 MID0243을 사용하여 사용자 데이터를 수신했음을 확인합니다.
자세한 내용은 "PowerFocus 6000 SW1.5.docx 파일로 된 OpenProtocal Appendix" 문서를 참조해 주세요.
SoftPLC 프로젝트 탬플릿 가져오기
새로운 SoftPLC 프로젝트는 기존 프로젝트 템플릿에서 생성할 수 있습니다. 템플릿은 추가로 조정할 수 있는 기본 제안 역할을 합니다. 선택된 프로젝트 템플릿은 그 다음에 원래 프로젝트를 덮어 덮어쓰지 않고 복사됩니다.
프로젝트 가져오기를 클릭하여 기존 SoftPLC 프로젝트를 선택하세요.
Multiprog에서 SoftPLC 프로젝트를 편집하세요.
프로젝트 가상 스테이션에서 업데이트를 선택하여 I/O 신호 구성을 포함하는 가상 스테이션 매핑을 추가하세요.
SoftPLC 프레임 크기에서 업데이트를 선택하여 필드버스 데이터를 추가하세요.
ToolsTalk 2 서버에서 편집된 프로젝트를 확인하시려면 저장을 클릭하세요.
컨트롤러로 변경 사항을 푸시하세요.
프로젝트 가상 스테이션에서 업데이트를 선택하시면 이미 프로젝트에 포함되지 않은 경우 SoftPLC 가상 스테이션 매핑은 SoftPLC 프로젝트에 추가되거나 업데이트됩니다.
라이브러리탭 작업
라이브러리 탭 은 왼쪽 메뉴 모음에 있고, 글로벌 기능을 포함하고 다음 기능을 제공함:
라이브러리 | 기능 |
|---|---|
 | 조임 프로그램 라이브러리 이 라이브러리는 컨트롤러가 구독할 수 있는 모든 글로벌 조임 프로그램이 포함되어 있습니다. 글로벌 조임 프로그램은 한 컨트롤러에서 복사하거나 라이브러리에서 만들 수 있고, 수정하고, 한 개 이상의 컨트롤러에 배포될 수 있습니다. |
 | 구성 라이브러리 이 라이브러리는 컨트롤러가 구독할 수 있는 모든 글로벌 구성이 포함되어 있습니다. 구성은 한 컨트롤러에서 복사하거나 라이브러리에서 만들 수 있고, 수정하고, 한 개 이상의 컨트롤러에 배포될 수 있습니다. |
 | 필드버스 구성 라이브러리 이 라이브러리는 컨트롤러가 구독할 수 있는 모든 글로벌 필드버스 구성이 포함되어 있습니다. 필드버스 구성은 한 컨트롤러에서 복사하거나 라이브러리에서 만들 수 있고, 수정하고, 한 개 이상의 컨트롤러에 배포될 수 있습니다. |
| 설정 라이브러리 다른 컨트롤러에 배포 할 수 있는 이벤트 구성을 위한 라이브러리입니다. 이벤트는 여기 또는 설정 |
| 프로그램 탬플릿 라이브러리 다단계 조임 프로그램에 대한 템플릿을 만듭니다. 새 다단계 프로그램을 만들 때, 템플릿은 새로운 다단계 프로그램을 구축하기 위해 삽입할 수 있고 (끌어서 놓기) 기준으로 사용할 수 있습니다. |
 | 컨트롤러 구성 라이브러리 컨트롤러 구성 라이브러리는 컨트롤러 구성을 생성 및 수정하고 여러 컨트롤러에 배포하는 데 사용할 수 있는 컨트롤러 템플릿을 포함합니다. 라이브러리는 또한 ToolsTalk 2 서버 설치에 액세스하지 않고 스테이션 설정 모드에서 구성을 복사하고 개발하는 데 매우 유용합니다. |
라이브러리 - 배포 목록
배포 목록은 구독 목록처럼 작동합니다. 글로벌 구성이 변경될 때마다, 해당 변경 사항은 모든 구독자에게 전파됩니다. 배포 목록은 구독을 관리합니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 다음 중 하나를 선택하여 배포 목록을 볼 수 있습니다.
글로벌 조임 프로그램
.글로벌 구성 라이브러리
 .
.글로벌 필드버스 라이브러리
 .
.글로벌 설정 라이브러리
 .
.
배포 목록의 내용을 보기 위해 선택한 라이브러리 섹션에서 하나 이상의 확인란을 선택합니다.
배포 목록은 현재 선택한 구성에 구독하는 모든 컨트롤러를 보여줍니다.
조임 프로그램 라이브러리
조임 프로그램 라이브러리 소개
조임 전략 선택 및 매개변수 값의 조합은 조임 프로그램을 형성하며 조임 프로그램으로 명명됩니다. 조임 프로그램은 글로벌 또는 로컬이 될 수 있습니다.
로컬 조임 프로그램은 한 컨트롤러에 유효하고, 글로벌 조임 프로그램은 같은 조임 프로그램에 여러 컨트롤러가 구독할 수 있습니다.
컨트롤러는 글로벌 조임 프로그램에 구독할 수 있습니다. 프로그램이 변경될 때마다 변경이 프로그램에 구독한 모든ToolsTalk 2 내에 있는 모든 컨트롤러에 전파됩니다.
조임 프로그램 라이브러리는 글로벌 조임 프로그램 및 특정 조임 프로그램을 사용하는 컨트롤러를 관리합니다.
구독자에 대한 업데이트는 ToolsTalk 2 애플리케이션 내에서 수행됩니다. 영향을 받는 모든 컨트롤러는 라인 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
ToolsTalk 2는 로컬 및 글로벌 조임 프로그램을 구분할 수 있지만 컨트롤러 자체에는 이러한 지식을 담고 있지 않습니다 따라서 조임 프로그램이 컨트롤러 GUI 또는 웹 GUI 중 하나를 통해 변경되는 경우 ToolsTalk 2내에서 작업을 지정하는 것이 중요합니다.
조임 프로그램 라이브러리 작업 영역
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램 라이브러리
로 이동합니다.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
열 | 설명 |
|---|---|
확인란 | 구성을 선택합니다. |
이름 | 구성의 이름을 표시합니다. 푸시 표시기 |
전략 | 구성을 위해 선택한 조임 전략. |
글로벌 | 열의 예는 이것이 글로벌 조임 프로그램임을 나타냅니다. |
목표 | 최종 목표는 토크 값 또는 각도의 값으로 표현됩니다. |
마지막 변경 | 마지막 변경이 이루어지면 ToolsTalk 2 시간에 표시됩니다. |
변경자 | 마지막으로 변경한 사용자를 나타냅니다. |
버전 | 글로벌 조임 프로그램 라이브러리를 지원할 수 있는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 조임 프로그램을 위한 컨트롤러 유형을 보여줍니다. |

명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
배포 목록을 보려면 한 개 이상의 글로벌 조임 프로그램 확인란을 선택하십시오. 배포 목록은 선택한 프로그램에 구독한 모든 컨트롤러를 보여줍니다.
글로벌 조임 프로그램이 없는 경우, 작업 영역이 비어 있습니다. 추가를 선택하여 새 조임 프로그램 만들거나 기존 프로그램을 두 번 클릭하여 매개변수를 보거나 편집합니다.
조임 프로그램 라이브러리 - 글로벌 조임 프로그램 추가하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램
으로 이동합니다.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
추가를 선택합니다. 새 조임 프로그램 만들기 대화 창이 열립니다.
아래 표에 설명된 매개변수를 입력합니다.
대화 창에서 추가를 선택합니다. 창이 닫히고 작업 영역이 조임 프로그램 메뉴를 보여줍니다.
매개변수 | 설명 |
|---|---|
컨트롤러 유형 | 바로 가기 메뉴에서 컨트롤러 유형을 선택합니다. |
컨트롤러 소프트웨어 버전 | 바로 가기 메뉴에서 컨트롤러 소프트웨어 버전을 선택합니다. |
이름 | 매개변수 입력 필드에서 글로벌 조임 프로그램 이름을 지정합니다. |
전략 | 바로 가기 메뉴에서 조임 전략을 선택합니다. |
목표 | 바로 가기 메뉴에서 목표 유형을 선택합니다. |
목표 값 | 매개변수 입력 필드에 최종 단계에 대한 목표 값을 입력합니다. |
조임 프로그램 라이브러리 - 글로벌 조임 프로그램 삭제하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램
으로 이동합니다.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
각 조임 프로그램을 삭제하려면 가장 왼쪽 열에서 확인란을 선택합니다.
관리를 선택한 다음 삭제를 선택합니다.
글로벌 조임 프로그램은 라이브러리에서 제거되고 목록이 업데이트됩니다.
삭제된 프로그램에 구독하는 컨트롤러는 프로그램을 잃지 않습니다. 삭제된 조임 프로그램은 조임 프로그램 라이브러리 작업 영역의 목록에서 제거됩니다. 조임 프로그램은 여전히 글로벌 조임 프로그램에 구독한 컨트롤러의 조임 작업 영역 목록에 표시됩니다. 가시적 변화는 조임 프로그램이 글로벌 조임 프로그램에서 로컬 조임 프로그램으로 변했다는 점입니다. (라이브러리 링크 열에 있는 항목이 삭제됩니다.)
조임 프로그램 라이브러리 - 글로벌 조임 프로그램 배포하기
조임 프로그램 라이브러리 - 배포 목록
글로벌 조임 프로그램 배포 목록 구독 목록과 같습니다. 글로벌 조임 프로그램이 변경될 때마다 변경은 모든 구독자에게 전파됩니다. 배포 목록은 구독을 관리합니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램
으로 이동합니다.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
배포 목록의 내용을 보기 위해 글로벌 조임 프로그램 라이브러리에서 하나 이상의 확인란을 선택합니다.
배포 목록은 현재 선택된 조임 프로그램에 구독하는 모든 컨트롤러를 보여줍니다.
조임 프로그램 라이브러리 - 배포 목록에 글로벌 프로그램 추가하기
왼쪽 메뉴 모음에서 라이브러리
를 선택하세요. 조임 프로그램
으로 이동하세요.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
확인란
을 사용하여 배포 목록에 추가할 한 개 이상의 프로그램을 선택할 수 있습니다.관리를 선택한 다음, 배포를 선택하세요.
글로벌 구성 배포 대화 창이 열립니다.
왼쪽 열은 선택한 글로벌 조임 프로그램을 보여줍니다.
오른쪽 열에는 선택한 프로그램과 호환되고 배포 목록에 추가할 수 있는 컨트롤러의 목록을 보여줍니다.
동일한 유형 및 동일한 소프트웨어 버전의 컨트롤러에만 배포 할 수 있습니다.
확인란
을 사용하여 오른쪽 열에서 하나 이상의 컨트롤러를 선택할 수 있습니다.컨트롤러가 이미 선택된 글로벌 조임 프로그램에 구독된 경우는 오른쪽 열에 표시되지 않습니다.
옵션 단계: 아래쪽 화살표
 를 선택하면 추가 구성을 열립니다.
를 선택하면 추가 구성을 열립니다.옵션 단계: 글로벌 조임 프로그램이 컨트롤러 GUI 또는 웹 GUI에 의해 변경된 경우 ToolsTalk 2가 수행할 작업을 선택하세요.
추가를 선택하세요.
대화 창이 닫힙니다.
ToolsTalk 2는 로컬 및 글로벌 조임 프로그램을 구분할 수 있지만 컨트롤러 자체에는 이러한 지식을 담고 있지 않습니다 그러므로 조임 프로그램이 컨트롤러 GUI 또는 웹 GUI 중 하나로 변경되는 경우 ToolsTalk 2내에서 작업을 지정하는 것이 중요합니다. 이 작업은 조임 프로그램 라이브러리의 글로벌 조임 프로그램의 배포에 정의되어 있습니다.
조임 프로그램 라이브러리 - 배포 목록에서 글로벌 프로그램 구독 제거하기
글로벌 조임 프로그램 배포 목록 구독 목록과 같습니다. 글로벌 조임 프로그램이 변경될 때마다 변경은 모든 구독자에게 전파됩니다. 배포 목록은 구독을 관리합니다.
배포 목록의 내용을 보기 위해 글로벌 조임 프로그램 확인란 한 개를 선택합니다. 배포 목록은 선택한 프로그램에 구독하는 모든 컨트롤러를 보여줍니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.조임 프로그램
으로 이동합니다.조임 프로그램 개요는 조임 프로그램의 목록을 보여줍니다.
라이브러리 링크 열의 항목이 선택한 조임 프로그램에 대하여 예로 표시됩니다.
선택한 조임 프로그램에 대하여
확인란을 선택합니다.링크 해제를 선택합니다.
라이브러리 링크 열의 항목이 선택한 조임 프로그램에 대하여 지워집니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램 라이브러리
로 이동합니다.선택한 조임 프로그램에 대하여
확인란을 선택합니다.배포 리스트가 업데이트되며, 컨트롤러 이름이 목록에서 제거됩니다.
조임 프로그램 라이브러리 - 글로벌 조임 프로그램 업데이트
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 조임 프로그램
으로 이동합니다.작업 영역은 글로벌 조임 프로그램의 목록을 보여줍니다.
이름 필드를 두 번 클릭하면 조임 메뉴를 편집할 수 있습니다. 변경 사항은 조임 프로그램에 자동 저장됩니다.
글로벌 조임 프로그램은 편집하거나, 라이브러리 경로에서 조임 메뉴가 열려 있는 경우 업데이트할 수 있습니다.
구독자에 대한 업데이트는 ToolsTalk 2 애플리케이션 내에서 수행됩니다. 영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
조임 프로그램 라이브러리 - 로컬 프로그램을 글로벌 조임 프로그램으로 변환하기
한 컨트롤러에서 개발된 로컬 조임 프로그램을 글로벌 조임 프로그램으로 적용할 수 있습니다. 이 조임 프로그램은 선택된 컨트롤러로 배포할 수 있습니다.
공장 구조에서 컨트롤러를 선택하고
조임 프로그램
.을 선택합니다.조임 프로그램 라이브러리에 추가할 프로그램의 확인란을 선택합니다.
관리를 선택한 다음, 드롭다운 메뉴에서 라이브러리에 추가를 선택합니다. 글로벌 구성 만들기 대화 창이 열립니다.
만들기를 선택합니다. 프로긂이 조임 프로그램 라이브러리 목록
.에 추가됩니다.
ToolsTalk 2는 컨트롤러 자체가 이에 대해 알지 못하더라도 로컬 및 글로벌 조임 프로그램을 구별 할 수 있습니다. 그러므로 조임 프로그램이 컨트롤러 GUI 또는 웹 GUI 중 하나로 변경되는 경우 ToolsTalk 2내에서 작업을 지정하는 것이 중요합니다.
글로벌 구성 라이브러리
구성 라이브러리 소개
구성은 글로벌 또는 로컬이 될 수 있습니다.
로컬 구성은 한 컨트롤러에 대해 유효하며 글로벌 구성은 여러 선택한 컨트롤러에 대해 유효합니다.
컨트롤러는 글로벌 구성을 구독할 수 있습니다. 구성을 변경할 때마다 이 구성을 구독하는 모든 ToolsTalk 2 컨트롤러에 이를 전파합니다.
글로벌 구성 라이브러리는 글로벌 구성 및 구성에 구독하는 컨트롤러를 관리합니다.
ToolsTalk 2는 로컬 및 글로벌 구성을 구별할 수 있습니다. 컨트롤러 자체는 로컬 또는 글로벌 조임 프로그램을 구분할 수 없습니다. 따라서 장치 교정이 컨트롤러 GUI 또는 웹 GUI 중 하나로 변경되는 경우 ToolsTalk 2내에서 작업을 지정하는 것이 중요합니다.
글로벌 구성 작업 영역
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 구성 라이브러리
로 이동합니다.작업 영역은 글로벌 구성의 목록을 보여줍니다.
열 | 설명 |
|---|---|
확인란 | 구성을 선택합니다. |
이름 | 구성의 이름을 표시합니다. 푸시 표시기 |
유형 | 구성 유형 |
마지막 변경 | 마지막 변경이 이루어지면 ToolsTalk 2 시간에 표시됩니다. |
변경자 | 마지막으로 변경한 사용자를 나타냅니다. |
버전 | 글로벌 조임 프로그램 라이브러리를 지원할 수 있는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 구성을 위한 컨트롤러 유형을 보여줍니다. |
명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
배포 목록을 보려면 한 개 이상의 글로벌 조임 프로그램 확인란을 선택합니다. 배포 목록은 선택한 프로그램에 구독한 모든 컨트롤러를 보여줍니다.
글로벌 조임 프로그램이 없는 경우, 작업 영역이 비어 있습니다. 추가를 클릭하여 새 조임 프로그램 만들거나 기존 프로그램을 두 번 클릭하여 매개변수를 보거나 편집합니다.
글로벌 구성 라이브러리 - 글로벌 구성 만들기 또는 가져오기
글로벌 구성 생성:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 구성 라이브러리로 이동합니다.
작업 영역은 글로벌 구성의 목록을 보여줍니다.
추가를 선택합니다.
새 구성 만들기 팝업 창이 나타납니다.
다음 매개변수를 입력함:
적용할 구성에 대하여 추가할 선택 유형, 컨트롤러 유형, 컨트롤러 소프트웨어 버전을 선택합니다.
바로 가기 창에서 추가를 클릭합니다.
선택한 구성 유형의 설정 화면이 표시됩니다.
구성은 구성 라이브러리에 자동 저장됩니다.
기존 필드버스 구성 가져오기:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 구성 라이브러리
로 이동합니다.작업 영역은 구성의 목록을 보여줍니다.
목록에 새로운 구성을 추가하려면, 추가를 선택합니다.
새 구성 만들기 팝업 창이 표시됩니다.
가져오기 탭을 선택합니다.
파일 열기를 선택합니다.
가져오기 파일을 읽기 위해 브라우저 창이 열립니다.
원하는 가져오기 파일을 선택합니다. 이 파일은 <configuration_name>.json 형식이어야 합니다. 열기를 선택합니다.
바로 가기 창에서 추가를 클릭합니다.
선택한 필드버스 구성을 위한 구성 창이 표시됩니다.
구성은 구성 라이브러리에 자동 저장됩니다.
글로벌 구성 라이브러리 - 글로벌 구성 삭제
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 구성 라이브러리
로 이동합니다.작업 영역은 글로벌 구성의 목록을 보여줍니다.
각 구성을 삭제하려면 가장 왼쪽 열에서 확인란
을 선택합니다.관리를 선택한 다음 삭제를 선택합니다.
글로벌 구성은 라이브러리에서 제거되고 목록이 업데이트됩니다.
삭제된 구성에 구독하는 컨트롤러는 구성을 잃지 않습니다. 삭제된 글로벌 구성은 구성 라이브러리 작업 영역의 목록에서 제거됩니다. 구성은 여전히 글로벌 구성에 구독한 컨트롤러의 구성 작업 영역 목록에 표시됩니다. 가시적 변화는 구성이 글로벌 구성에서 로컬 구성으로 변했다는 점입니다. (라이브러리 링크 열에 있는 항목이 삭제됩니다.)
글로벌 구성 라이브러리 - 기존으로부터 글로벌 구성 만들기
공장 구조
에서 원하는 구성을 포함하는 컨트롤러를 선택합니다.메뉴 모음에서 구성
으로 이동합니다.라이브러리에 추가할 구성을 한 개 이상 선택하고, 관리를 클릭한 다음, 라이브러리에 추가를 선택합니다.
선택한 로컬 구성은 글로벌 구성 라이브러리에 저장되는 글로벌 구성될 것입니다.
로컬 변경을 컨트롤러 또는 웹 인터페이스로 적용하는 경우의 두 가지 옵션:
자동 되돌리기: 컨트롤러의 변화는 글로벌 구성에 적용되지 않고, 글로벌 구성이 여전히 적용됩니다.
링크 해제: 컨트롤러의 변화는 컨트롤러 구성에 적용하고, 글로벌 구성에 대한 링크가 끊깁니다. 그 결과로 글로벌 구성은 즉시 그 컨트롤러의 배포 목록으로부터 제거됩니다.
라이브러리
를 선택합니다. 상단 메뉴 모음에서 글로벌 구성
을 선택합니다.작업 영역은 글로벌 구성 목록을 보여주고 새로 추가된 구성이 목록에 표시됩니다.
글로벌 구성 라이브러리 - 글로벌 구성 배포
왼쪽 메뉴 모음에서 라이브러리
를 선택하세요. 구성 라이브러리
로 이동하세요.작업 영역은 글로벌 구성의 목록을 보여줍니다.
구성 확인란을 선택하세요. 관리를 선택한 다음, 배포를 선택하세요.
동일한 유형 및 동일한 소프트웨어 버전의 컨트롤러에만 배포 할 수 있습니다.
확인란
을 사용하여 배포에 포함할 각 구성을 선택하세요.대화 창의 오른쪽에 있는 하나 이상의 컨트롤러를 선택하세요. 대화 창에서 추가를 선택하세요.
글로벌 구성에 대한 모든 업데이트는 배포된 사본을 업데이트합니다. 글로벌 구성의 변화는 선택한 컨트롤러에 적용됩니다.
로컬 변경을 컨트롤러 또는 웹 GUI로 적용하는 경우의 두 가지 옵션:
자동 되돌리기: 컨트롤러의 변화는 구성에 적용되지 않고, 글로벌 구성은 여전히 유효합니다.
링크 해제: 컨트롤러의 변화는 구성에 적용되고, 글로벌 구성에 대한 링크가 끊깁니다. 그 결과로 글로벌 구성은 즉시 그 컨트롤러의 배포 목록으로부터 제거됩니다.
변경 사항은 글로벌 구성 라이브러리에 자동 저장됩니다.
영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
글로벌 구성 라이브러리 - 글로벌 구성 편집
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 라이브러리
를 선택합니다.작업 영역은 글로벌 구성의 목록을 보여줍니다.
편집할 구성을 더블 클릭합니다. 선택한 구성 유형의 구성 창이 표시됩니다.
변경 사항은 글로벌 구성 라이브러리에 자동 저장됩니다.
영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
조임 프로그램 라이브러리 - 배포 목록에서 글로벌 프로그램 구독 제거
글로벌 구성 배포 목록은 구독 목록과 같습니다. 글로벌 조임 프로그램이 변경될 때마다 변경은 모든 구독자에게 전파됩니다. 배포 목록은 구독을 관리합니다.
배포 목록의 내용을 보기 위해 글로벌 조임 프로그램 확인란 한 개를 선택합니다. 배포 목록은 선택한 구성을 구독하는 모든 컨트롤러를 보여줍니다.
하나의 컨트롤러에서 글로벌 조임 프로그램의 구독 제거:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.구성
으로 이동합니다.조임 작업 영역은 조임 프로그램의 목록을 보여줍니다.
라이브러리 링크 열의 항목이 선택한 조임 프로그램에 대하여 예로 표시됩니다.
선택한 조임 프로그램에 대하여
확인란을 선택합니다.드롭다운 메뉴에서 관리를 선택한 다음 링크 해제를 선택합니다.
라이브러리 링크 열의 항목이 선택한 조임 프로그램에 대하여 지워집니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 구성 라이브러리
로 이동합니다.컨트롤러의 확인란
을 선택합니다.배포 리스트가 업데이트되며, 컨트롤러 이름이 목록에서 제거됩니다.
필드버스 구성 라이브러리
필드버스의 구성은 글로벌 또는 로컬이 될 수 있습니다.
로컬 필드버스 구성은 한 컨트롤러에 대해 유효하며 글로벌 필드버스 구성은 여러 선택한 컨트롤러에 대해 유효합니다.
컨트롤러는 글로벌 필드버스 구성에 구독할 수 있습니다. 구성을 변경할 때마다 이 구성을 구독하는 모든 ToolsTalk 2 컨트롤러에 이를 전파합니다.
글로벌 필드버스 구성 라이브러리는 글로벌 필드버스 구성 및 구성에 구독 컨트롤러를 관리합니다.
구독자에 대한 업데이트는 ToolsTalk 2 애플리케이션 내에서 수행됩니다. 영향을 받는 모든 컨트롤러는 라인 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
ToolsTalk 2는 로컬 및 글로벌 필드 버스 구성을 구별 할 수 있지만 컨트롤러 자체에는 이러한 기능이 없습니다. 따라서 조임 프로그램이 컨트롤러 GUI 또는 웹 GUI 중 하나로 변경되는 경우 ToolsTalk 2내에서 작업을 지정하는 것이 중요합니다.
필드버스 구성 작업 영역
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 필드버스 라이브러리
로 이동합니다.작업 영역은 글로벌 필드버스 구성의 목록을 보여줍니다.
열 | 설명 |
|---|---|
확인란 | 필드버스 구성을 선택합니다. |
이름 | 구성의 이름을 표시합니다. 푸시 표시기 |
컨트롤러로 보내는 크기 | 데이터 프레임의 수신 크기를 표시합니다. |
컨트롤러에서 받는 크기 | 데이터 프레임의 전송 크기를 표시합니다. |
마지막 변경 | 마지막 변경이 이루어지면 ToolsTalk 2 시간에 표시됩니다. |
변경자: | 마지막으로 변경한 사용자입니다. |
버전 | 글로벌 조임 프로그램 라이브러리를 지원할 수 있는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 조임 프로그램을 위한 컨트롤러 유형을 보여줍니다. |
명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
배포 목록을 보려면 한 개 이상의 글로벌 조임 프로그램 확인란을 선택합니다. 배포 목록은 현재 선택된 필드버스 구성에 구독하는 모든 컨트롤러를 보여줍니다.
글로벌 조임 프로그램이 없는 경우, 작업 영역이 비어 있습니다. 추가를 클릭하여 새 조임 프로그램 만들거나 기존 프로그램을 두 번 클릭하여 매개변수를 보거나 편집합니다.
필드버스 구성 라이브러리 - 글로벌 필드버스 구성 만들기 또는 가져오기
필드버스 구성 만들기:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 필드버스 라이브러리
로 이동합니다.작업 영역은 필드버스 구성의 목록을 보여줍니다.
목록에 새 필드버스 구성을 추가하려면 추가를 클릭합니다.
새로운 필드버스 구성 만들기 대화 창이 표시됩니다
새로운 필드버스 맵을 추가하기 위해 입력할 매개변수:
이름을 입력합니다.
크기에서 컨트롤러로 및 컨트롤러에서 크기로 입력함
바로 가기 메뉴에서 컨트롤러 유형과 컨트롤러 소프트웨어 버전을 선택합니다.
바로 가기 창에서 추가를 클릭합니다.
추가 필드버스 구성을 위한 구성 창이 표시됩니다.
필드버스 구성은 필드버스 라이브러리에 자동 저장됩니다.
기존 필드버스 구성 가져오기:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 필드버스 라이브러리
로 이동합니다.작업 영역은 필드버스 구성의 목록을 보여줍니다.
목록에 새로운 구성을 추가하려면, 추가를 선택합니다.
새로운 필드버스 구성 만들기 대화 창이 표시됩니다
가져오기 탭을 선택합니다.
파일 열기를 선택합니다.
가져오기 파일을 읽기 위해 브라우저 창이 열립니다.
원하는 가져오기 파일을 선택합니다. 이 파일은 <controller_template_name>.json 형식이어야 합니다. 열기를 선택합니다.
바로 가기 창에서 추가를 클릭합니다.
추가 필드버스 구성을 위한 구성 창이 표시됩니다.
필드버스 구성은 필드버스 라이브러리에 자동 저장됩니다.
필드버스 구성 라이브러리 - 글로벌 필드버스 구성 삭제하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 필드버스 구성 라이브러리
로 이동합니다.작업 영역은 글로벌 필드버스 구성의 목록을 보여줍니다.
필드 버스 구성을 삭제하려면,
가장 왼쪽 열의 확인란을 선택한 다음 삭제를 선택하십시오. 글로벌 필드버스 구성은 라이브러리에서 제거되고 목록이 업데이트됩니다.
삭제된 구성에 구독하는 컨트롤러는 구성을 잃지 않습니다. 삭제된 글로벌 필드버스 구성은 필드버스구성 라이브러리 작업 영역의 목록에서 제거됩니다. 필드버스 구성은 여전히 글로벌 필드버스 구성에 구독한 컨트롤러의 필드버스 작업 영역 목록에 표시됩니다. 가시적 변화는 필드버스 구성이 글로벌 필드버스 구성에서 로컬 필드버스 구성으로 변했다는 점입니다. (라이브러리 링크 열에 있는 항목이 삭제됩니다.)
필드버스 구성 라이브러리 - 기존의 필드버스 구성에서 글로벌 필드버스 구성 만들기
공장 구조 작업 영역
에서 컨트롤러(원하는 필드버스 구성 포함)를 선택합니다.메뉴 모음에서 필드버스 및 SoftPLC
를 선택합니다.필드버스 메뉴에서, 하나 이상의 필드 버스 신호 구성을 선택하여 라이브러리에 추가합니다. 드롭다운 메뉴에서 관리를 선택한 다음 라이브러리에 추가를 선택합니다.
글로벌 구성 만들기 대화 창이 열립니다. 만들기를 선택합니다.
선택한 로컬 구성은 글로벌 필드버스 구성 라이브러리에 저장되는 글로벌 구성이 될 것입니다.
컨트롤러 또는 웹 GUI에서 로컬 변경이 이루어지면 다음 두 가지 옵션을 사용할 수 있습니다:
자동 되돌리기: 컨트롤러의 변화는 글로벌 필드버스 구성에 적용되지 않고, 글로벌 필드버스 구성이 여전히 적용됩니다.
링크 해제: 컨트롤러의 변화는 컨트롤러에서 필드버스의 구성에 적용되며, 글로벌 구성에 대한 링크가 절단됩니다. 그 결과로 글로벌 필드버스는 즉시 그 컨트롤러의 배포 목록으로부터 제거됩니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 필드버스 라이브러리
로 이동합니다.작업 영역은 글로벌 필드버스 구성의 목록을 보여주고 새로 추가된 필드버스 구성이 목록에 표시됩니다.
필드버스 구성 라이브러리 - 글로벌 필드버스 구성 배포하기
왼쪽 메뉴 모음에서 라이브러리
를 선택하세요. 글로벌 필드버스 라이브러리
로 이동하세요.작업 영역은 글로벌 필드버스 구성의 목록을 보여줍니다.
배포할 필드버스 구성 확인란
을 선택하세요. 드롭다운 메뉴에서 관리를 선택한 다음 배포를 선택하세요.동일한 유형 및 동일한 소프트웨어 버전의 컨트롤러에만 배포 할 수 있습니다.
글로벌 구성 배포 대화 창이 열립니다.
대화 창의 오른쪽에 있는 하나 이상의 컨트롤러를 선택합니다. 추가를 선택합니다.
글로벌 구성에 대한 모든 업데이트는 배포된 사본을 업데이트합니다. 글로벌 구성의 변화는 선택한 컨트롤러에 적용됩니다.
컨트롤러 또는 웹 GUI에서 로컬 변경이 이루어지면 다음 두 가지 옵션을 사용할 수 있습니다:
자동 되돌리기: 컨트롤러의 변화는 글로벌 필드버스 구성에 적용되지 않고, 글로벌 필드버스 구성이 여전히 적용됩니다.
링크 해제: 컨트롤러의 변화는 컨트롤러에서 필드버스의 구성에 적용되며, 글로벌 구성에 대한 링크가 절단됩니다. 그 결과로 글로벌 구성은 즉시 그 컨트롤러의 배포 목록으로부터 제거됩니다.
변경 사항은 글로벌 필드버스 라이브러리에 자동 저장됩니다.
영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
필드버스 구성 라이브러리 - 글로벌 필드버스 구성 편집하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 필드버스 라이브러리
로 이동합니다.작업 영역은 글로벌 필드버스 구성의 목록을 보여줍니다.
편집할 필드버스 구성을 두 번 클릭합니다.
선택한 필드버스 구성을 위한 구성 창이 표시됩니다.
필드버스 구성은 글로벌 필드버스 구성 라이브러리에 자동 저장됩니다.
영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
필드버스 구성 라이브러리 - 글로벌 필드버스 구성 내보내기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 필드버스 구성 라이브러리
로 이동합니다.작업 영역은 글로벌 필드버스 구성의 목록을 보여줍니다.
내보낼 글로벌 필드버스 구성의 확인란
을 선택합니다.내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <구성>.json입니다. 저장을 클릭합니다.
필드 버스 구성 라이브러리 - 배포 목록에서 필드 버스 구성 구독 제거하기
글로벌 필드버스 구성 배포 목록은 구독 목록과 같습니다. 글로벌 필드버스 구성이 변경될 때마다 변경은 모든 구독자에게 전파됩니다. 배포 목록은 구독을 관리합니다.
배포 목록의 내용을 보려면 글로벌 필드버스 구성 확인란 한 개를 선택합니다. 배포 목록은 선택한 구성을 구독하는 모든 컨트롤러를 보여줍니다.
하나의 컨트롤러에서 글로벌 필드버스 구성의 구독 제거하기
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.필드버스 및 SoftPLC
로 이동합니다.필드버스 작업 영역은 조임 프로그램의 목록을 보여줍니다.
라이브러리 링크 열의 항목이 배포된 필드버스에 대하여 예로 표시됩니다.
선택한 조임 프로그램에 대하여 확인란
을 선택합니다.드롭다운 메뉴에서 관리를 선택한 다음 링크 해제를 선택합니다.
라이브러리 링크 열의 항목이 선택한 조임 프로그램에 대하여 지워집니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 필드버스 구성 라이브러리
로 이동합니다.제거된 필드버스 구성의 확인란을 선택합니다.
배포 리스트가 업데이트되며, 컨트롤러 이름이 목록에서 제거됩니다.
글로벌 설정 라이브러리 - 글로벌 이벤트 구성 삭제하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 설정 구성의 목록을 보여줍니다.
각 구성을 삭제하려면 가장 왼쪽 열에서 확인란
을 선택합니다.관리를 선택한 다음, 드롭다운 메뉴에서 삭제를 선택합니다.
글로벌 설정 구성은 라이브러리에서 제거되고 목록이 업데이트됩니다.
삭제된 구성에 구독하는 컨트롤러는 구성을 잃지 않습니다. 삭제된 글로벌 구성은 설정 라이브러리 작업 영역의 목록에서 제거됩니다. 구성은 여전히 글로벌 구성에 구독한 컨트롤러의 이벤트 구성 작업 영역 목록에 표시됩니다. 눈에 보이는 변화는 구성이 글로벌 이벤트 구성에서 로컬 이벤트 구성으로 변환된다는 것입니다 (설정에서 이벤트 아래의 라이브러리 링크도 삭제됨).
글로벌 설정 라이브러리
매개변수 | 설명 |
|---|---|
확인란 | 이벤트 구성 템플릿을 선택합니다. |
이름 | 이벤트 구성 템플릿의 이름을 표시합니다. |
마지막 변경 | 최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다. |
변경자: | 마지막 변경자... |
버전 | 이벤트 구성 템플릿이 지원하는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 이벤트 구성 위한 컨트롤러 유형을 보여줍니다. |
고객 키 | 새로운 글로벌 이벤트 구성을 만들 때의 기본 값은 없음입니다. 기본 컨트롤러에서 글로벌 이벤트 구성을 만들 때 컨트롤러의 Iam.CustomerKey에서 가져온 값입니다. |
구성 명령 버튼 설정
명령 | 설명 |
|---|---|
| |
추가 |
|
관리 |
|
이전의 이벤트 구성 템플릿이 없으면 작업 공간 영역이 공란이 됩니다. 추가를 선택하여 이벤트 구성 템플릿을 만들거나 기존 템플릿을 두 번 클릭하여 매개변수를 보거나 편집합니다.
글로벌 설정 라이브러리 - 글로벌 이벤트 구성 만들기 또는 가져오기
글로벌 이벤트 구성 만들기:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 이벤트 구성의 목록을 보여줍니다.
추가를 선택합니다.
새로운 이벤트 구성 만들기 팝업 창이 표시됩니다.
다음 매개변수를 입력함:
구성에 이름을 부여합니다.
드롭 다운 목록에서 컨트롤러 유형을 선택합니다.
구성에 대한 컨트롤러 소프트웨어 버전을 선택합니다.
대화 창에서 추가를 선택합니다.
이벤트 구성 창이 표시됩니다. 각 섹션을 확장하여 특정 매개 변수를 설정합니다.
새로운 구성은 글로벌 설정 라이브러리에 자동 저장됩니다.
기존 글로벌 이벤트 구성 가져오기:
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 설정 라이브러리
로 이동합니다.작업 영역은 글로벌 이벤트 구성의 목록을 보여줍니다.
목록에 새로운 구성을 추가하려면, 추가를 선택합니다.
새로운 이벤트 구성 만들기 대화 창이 표시됩니다.
가져오기 탭을 선택합니다.
파일 열기를 선택합니다.
가져오기 파일을 읽기 위해 브라우저 창이 열립니다.
원하는 가져오기 파일을 선택합니다. 이 파일은 <configuration_name>.json 형식이어야 합니다. 열기를 선택합니다.
바로 가기 창에서 추가를 클릭합니다.
가져온 구성에 대한 이벤트 구성 창이 표시됩니다.
구성은 이벤트 구성 라이브러리에 자동 저장됩니다.
글로벌 설정 라이브러리 - 글로벌 이벤트 구성 삭제하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 설정 구성의 목록을 보여줍니다.
각 구성을 삭제하려면 가장 왼쪽 열에서 확인란
을 선택합니다.관리를 선택한 다음, 드롭다운 메뉴에서 삭제를 선택합니다.
글로벌 설정 구성은 라이브러리에서 제거되고 목록이 업데이트됩니다.
삭제된 구성에 구독하는 컨트롤러는 구성을 잃지 않습니다. 삭제된 글로벌 구성은 설정 라이브러리 작업 영역의 목록에서 제거됩니다. 구성은 여전히 글로벌 구성에 구독한 컨트롤러의 이벤트 구성 작업 영역 목록에 표시됩니다. 눈에 보이는 변화는 구성이 글로벌 이벤트 구성에서 로컬 이벤트 구성으로 변환된다는 것입니다 (설정에서 이벤트 아래의 라이브러리 링크도 삭제됨).
글로벌 설정 라이브러리 - 글로벌 구성 배포하기
왼쪽 메뉴 모음에서 라이브러리
를 선택하세요. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 이벤트 구성의 목록을 보여줍니다.
배포할 글로벌 이벤트의 확인란
을 선택합니다.관리를 선택하고 드롭다운 메뉴에서 배포를 선택합니다.
동일한 유형 및 동일한 소프트웨어 버전의 컨트롤러에만 배포 할 수 있습니다.
글로벌 구성 배포 대화 창이 열립니다.
배포에 포함할 각 구성에 대하여 확인란
을 선택합니다.구성 유형은 개별적으로 선택할 수 있습니다. 특정 종속성이 구성 사이에 존재합니다. 글로벌 구성 배포를 위해 선택할 때, 추가 구성을 기본적으로 선택할 수 있습니다.
대화 창의 오른쪽에 있는 하나 이상의 컨트롤러를 선택합니다.
대화 창에서 추가를 선택합니다.
대화 상자 창이 닫히고 배포 대상 목록에 컨트롤러가 추가됩니다. 설정의 이벤트 메뉴에 새로운 라이브러리 링크가 추가됩니다.
선택한 구성은 ToolsTalk 2의 컨트롤러에만 배포됩니다.
새로운 구성을 배포하면 기존 구성은 삭제되며 라이브러리 템플릿의 구성으로 교체됩니다.
조임 프로그램 설정 라이브러리 - 배포 목록에서 글로벌 프로그램 구독 제거하기
컨트롤러에서 글로벌 설정 링크 제거하기:
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.설정
으로 이동합니다.이벤트 작업 영역에는 연결된 글로벌 설정이 표시됩니다.
드롭다운 메뉴에서 관리를 선택한 다음 링크 해제를 선택합니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 글로벌 설정 라이브러리
로 이동합니다.제거된 설정의 확인란
을 선택합니다.배포 리스트가 업데이트되며, 컨트롤러 이름이 목록에서 제거됩니다.
글로벌 설정 라이브러리 - 글로벌 이벤트 구성 편집하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 이벤트 구성의 목록을 보여줍니다.
편집할 구성을 더블 클릭합니다. 선택한 구성 유형의 구성 창이 표시됩니다.
변경 사항은 글로벌 설정 구성 라이브러리에 자동 저장됩니다.
영향을 받는 모든 컨트롤러는 공장 구조 작업 영역에서 푸시 표시기 가 표시됩니다.
글로벌 설정 라이브러리 - 글로벌 이벤트 구성 내보내기
글로벌 이벤트 템플릿은 내보낸 다음 다른 ToolsTalk 2 설치 또는 ToolsTalk 2스테이션 설정 설치에서 재사용 (가져오기)할 수 있습니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 설정
라이브러리 탭을 선택합니다.작업 영역은 글로벌 이벤트 구성의 목록을 보여줍니다.
내보낼 컨트롤러 템플릿의 확인란
을 선택합니다.내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <구성>.json입니다. 저장을 선택합니다.
내보낸 파일은 *.json 확장자를 가진 어떤 이름이든 부여할 수 있습니다.
내보낸 *.json 파일 안에서 컨트롤러 템플릿은 컨트롤러 열의 이름이 지정됩니다. 컨트롤러 템플릿을 가져오면, 컨트롤러 템플릿에 주어진 이름은 파일 이름과 관계없이 *.json 파일 안의 이 필드에서 가져옵니다. 이 가져온 컨트롤러 템플릿이 가져온 파일 이름이 아닌 다른 이름을 가질 수 있음을 의미합니다.
컨트롤러 템플릿이 같은 이름을 갖는 것을 방지하기 위해 내보내기 전에 템플릿에 고유한 이름을 주고, 파일 이름은 변경하지 않는 것을 권장합니다.
프로그램 템플릿

라이브러리 > 프로그램 템플릿
다단계 조임 프로그램에 대한 템플릿을 만듭니다. 새 다단계 프로그램을 만들 때, 템플릿은 새로운 다단계 프로그램을 구축하기 위해 사용할 수 있습니다.
새로운 템플릿을 만들기 위해 추가를 클릭합니다.
프로그램 템플릿 목록에서 템플릿을 두 번 클릭하여 기존 템플릿을 수정합니다. 템플릿은 프로그램에 연결되는 대신에 복사되기 때문에 해당 템플릿을 기반으로 하는 다단계 프로그램은 영향을 받지 않습니다.
프로그램 탬플릿 작업 영역
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 프로그램 탬플릿 라이브러리
로 이동합니다.작업 영역은 글로벌 조임 프로그램 탬플릿의 목록을 보여줍니다.
열 | 설명 |
|---|---|
확인란 | 조임 프로그램 탬플릿을 선택합니다. |
이름 | 조임 프로그램 템플릿의 이름을 표시합니다. 푸시 표시기 |
전략 | 조임 프로그램 탬플릿에 대하여 선택한 조임 전략. |
목표 | 최종 목표는 토크 값 또는 각도의 값으로 표현됩니다. |
마지막 변경 | 마지막 변경이 이루어지면 ToolsTalk 2 시간에 표시됩니다. |
변경자: | 마지막으로 변경한 사용자입니다. |
버전 | 글로벌 조임 프로그램 탬플릿을 지원할 수 있는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 조임 프로그램 탬플릿 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 조임 프로그램 탬플릿 위한 컨트롤러 유형을 보여줍니다. |
명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
배포 목록을 보려면 한 개 이상의 글로벌 조임 프로그램 탬플릿 확인란을 선택합니다. 배포 목록은 선택한 프로그램 탬플릿을 구독한 모든 컨트롤러를 보여줍니다.
글로벌 조임 프로그램 탬플릿이 없는 경우, 작업 영역이 비어 있습니다. 추가를 클릭하여 새로운 조임 프로그램 탬플릿을 만들거나 기존 프로그램을 두 번 클릭하여 매개변수를 보거나 편집할 수 있습니다.
조임 프로그램 탬플릿 가져오기
이번에 내보낸 조임 프로그램 탬플릿은 ToolsTalk 2 설치 또는 ToolsTalk 2 스테이션 설치에서 가져올 수 있습니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 프로그램 탬플릿
으로 이동합니다.작업 영역은 조임 프로그램 템플릿의 목록을 보여줍니다.
추가를 선택한 다음 새로운 조임 프로그램 탬플릿 만들기 창에서 가져오기 탭을 선택합니다.
파일 열기를 선택하고 가져오기를 원하는 파일을 선택합니다. 이 파일은 <tightening_program_template_name>.json 형식이어야 합니다. 열기를 선택합니다.
작업 영역은 조임 프로그램 템플릿의 업데이트된 목록을 보여줍니다.
내보낸 파일은 *.json 확장자를 가진 어떤 이름이든 부여할 수 있습니다. *.json 파일은 조임 프로그램 템플릿 목록에 표시된 컨트롤러 템플릿 이름을 포함합니다. 조임 프로그램 템플릿을 가져오면, 조임 프로그램 템플릿에 주어진 이름은 파일 이름과 관계없이 *.json 파일에서 가져옵니다. 이는 가져온 조임 프로그램 템플릿이 가져온 파일 이름이 아닌 다른 이름을 가질 수 있음을 의미합니다. 조임 프로그램 템플릿이 같은 이름을 갖는 것을 방지하기 위해 내보내기 전에 템플릿에 고유한 이름을 주고, 파일 이름은 변경하지 않는 것을 권장합니다.
컨트롤러 구성 라이브러리
컨트롤러 라이브러리 소개
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
컨트롤러 라이브러리 작업 영역
매개변수 | 설명 |
|---|---|
확인란 | 컨트롤러 템플릿을 선택합니다. |
컨트롤러 | 컨트롤러 템플릿의 이름을 표시합니다. |
최종 변경 | 최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다. |
변경자: | 마지막 변경자... |
버전 | 컨트롤러 템플릿이 지원하는 컨트롤러 소프트웨어 버전. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
컨트롤러 유형 | 구성을 위한 컨트롤러 유형을 보여줍니다. |
명령 | 설명 |
|---|---|
추가 |
|
관리 |
|
컨트롤러 템플릿이 존재하지 않는 경우, 작업 영역이 비어 있습니다. 추가를 클릭하여 새 컨트롤러 템플릿을 만들거나 기존 템플릿을 두 번 클릭하여 매개변수를 보거나 편집합니다.
컨트롤러 구성 라이브러리 - 새 컨트롤러 탬플릿 만들기
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
으로 이동합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
추가를 선택합니다.
새로운 컨트롤러 템플릿 만들기 대화 창이 표시됩니다.
다음 매개변수를 입력함:
컨트롤러 템플릿의 이름을 지정합니다.
드롭다운 메뉴에서 컨트롤러 유형을 선택합니다.
드롭다운 메뉴에서 컨트롤러 소프트웨어 버전을 선택합니다.
추가를 선택합니다.
대화 창이 닫히고 컨트롤러 템플릿의 목록이 업데이트됩니다.
올바른 컨트롤러 소프트웨어 버전을 선택하는 것이 중요합니다. 템플릿은 동일한 소프트웨어 버전을 가진 컨트롤러에만 배포할 수 있습니다.
컨트롤러 구성 라이브러리 - 컨트롤러 템플릿 삭제하기
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
을 선택합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
삭제할 컨트롤러 템플릿의 확인란을 선택합니다.
관리를 선택하고 드롭다운 메뉴에서 삭제를 선택합니다. 탬플릿은 목록에서 삭제됩니다.
컨트롤러 구성 라이브러리 - 기존 컨트롤러에서 템플릿 만들기
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.관리를 선택하고 드롭다운 메뉴에서 라이브러리에 추가를 선택합니다.
모든 컨트롤러 구성은 하드웨어 및 공구 존속성을 제외하고 컨트롤러 구성 라이브러리에 복사됩니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 작업 영역 창 상단 메뉴 모음에서 컨트롤러 구성
을 선택합니다.작업 영역은 컨트롤러 구성 목록 및 목록에 있는 템플릿으로 사용할 수 있는 새로 생성된 컨트롤러 구성을 표시합니다.
컨트롤러 템플릿의 이름은 소스 컨트롤러 이름에서 복사됩니다.
라이브러리에서 컨트롤러 템플릿에 고유한 이름을 지정하는 것을 권장합니다.
컨트롤러 구성 라이브러리 - 컨트롤러 템플릿 배포
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
컨트롤러 템플릿 또는 그 부분은 여러 컨트롤러에 배포할 수 있습니다. 배포는 구성이 템플릿에서 복사되고 허용될 때마다 대상 컨트롤러 구성을 덮어씀을 의미합니다.
컨트롤러 템플릿 소프트웨어 버전은 대상 컨트롤러 소프트웨어 버전과 동일해야 합니다. 일치하지 않으면, 배포할 수 없음
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
으로 이동합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
배포할 컨트롤러 템플릿의 확인란을 선택합니다.
관리를 선택하고 드롭다운 메뉴에서 배포를 선택합니다.
동일한 유형 및 동일한 소프트웨어 버전의 컨트롤러에만 배포 할 수 있습니다.
컨트롤러 템플릿 배포 대화 창이 열립니다.
배포에 포함할 각 구성에 대하여 확인란
을 선택합니다.구성 유형은 개별적으로 선택할 수 있습니다. 특정 종속성이 구성 사이에 존재합니다. 템플릿 구성 배포를 위해 선택할 때, 추가 구성을 기본적으로 선택할 수 있습니다.
대화 창의 오른쪽에 있는 하나 이상의 컨트롤러를 선택합니다.
대화 창에서 배포를 선택합니다.
대화 창이 닫힙니다.
선택한 구성은 ToolsTalk 2의 컨트롤러에만 배포됩니다.
배포를 위해 선택된 구성은 기존 구성을 삭제하고 템플릿의 컨트롤러 구성으로 대체됩니다.
컨트롤러 구성 라이브러리 - 컨트롤러 템플릿 편집 또는 구성하기
컨트롤러 템플릿 편집은 일반 컨트롤러 구성과 매우 유사합니다. 거의 모든 메뉴 아이콘 및 매개변수 설정은 ToolsTalk 2 GUI에서 실제 컨트롤러에 할 수 있는 것과 동일합니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
으로 이동합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
컨트롤러 템플릿 목록에서 이름 필드를 두 번 클릭합니다.
컨트롤러 작업 영역은 실제 컨트롤러와 동일합니다. 이것이 컨트롤러 템플릿임을 표시하기 위해, 컨트롤러 메뉴의 배경색은 어두운 대신에 밝은 회색입니다.
컨트롤러 구성 라이브러리 - 컨트롤러 템플릿 내보내기
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
컨트롤러 템플릿은 내보낸 다음 다른 ToolsTalk 2 설치 또는 ToolsTalk 2 스테이션 설정 설치에서 재사용 (가져오기)할 수 있습니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
으로 이동합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
내보낼 컨트롤러 템플릿의 확인란을 선택합니다.
관리를 선택하고 드롭다운 메뉴에서 내보내기를 선택합니다.
브라우저 창에 내보내기 파일을 저장하기 위해 열립니다.
기본 파일 이름은 <controller_template_name>.json입니다. 저장을 선택합니다.
내보낸 파일은 *.json 확장자를 가진 어떤 이름이든 부여할 수 있습니다.
내보낸 *.json 파일 안에서 컨트롤러 템플릿은 컨트롤러 열의 이름이 지정됩니다. 컨트롤러 템플릿을 가져오면, 컨트롤러 템플릿에 주어진 이름은 파일 이름과 관계없이 *.json 파일 안의 이 필드에서 가져옵니다. 이 가져온 컨트롤러 템플릿이 가져온 파일 이름이 아닌 다른 이름을 가질 수 있음을 의미합니다.
컨트롤러 템플릿이 같은 이름을 갖는 것을 방지하기 위해 내보내기 전에 템플릿에 고유한 이름을 주고, 파일 이름은 변경하지 않는 것을 권장합니다.
컨트롤러 구성 라이브러리 - 컨트롤러 템플릿 가져오기
컨트롤러 템플릿은 전체적인 가상 컨트롤러입니다. 사용자가 물리적 컨트롤러를 사용하지 않고 모든 컨트롤러 구성을 생성, 편집, 분석할 수 있습니다. 컨트롤러 템플릿은 전부 비어있는 매개변수 값으로 시작하여 처음부터 만들 수 있습니다. 컨트롤러 템플릿은 유효한 구성 및 매개변수가 있는 기존의 컨트롤러를 복사하여 생성할 수 있습니다.
공구가 연결되지 않았으므로, 컨트롤러 템플릿은 공구에 대한 정보를 표시하지 않습니다. 하드웨어 관련 정보 및 구성이 가능하지 않습니다. 각종 서버와 같은 지원 기능의 구성은 템플릿에서 가능하지 않습니다. 템플릿을 컨트롤러에 배포하는 경우, 이 매개변수를 선택 또는 추가해야 합니다.
이전에 내보낸 컨트롤러 템플릿은 ToolsTalk 2 설치 또는 ToolsTalk 2 스테이션 설정 설치에 가져올 수 있습니다.
왼쪽 메뉴 모음에서 라이브러리
를 선택합니다. 컨트롤러 구성
으로 이동합니다.작업 영역은 컨트롤러 템플릿의 목록을 보여줍니다.
추가를 선택한 다음 새로운 컨트롤러 탬플릿 만들기 창에서 가져오기 탭을 선택합니다..
파일 열기를 선택하고 가져오기를 원하는 파일을 선택합니다. 이 파일은 <controller_template_name>.json 형식이어야 합니다. 열기를 선택합니다.
작업 영역은 컨트롤러 템플릿의 업데이트된 목록을 보여줍니다.
내보낸 파일은 *.json 확장자를 가진 어떤 이름이든 부여할 수 있습니다. *.json 파일은 컨트롤러 템플릿 목록에 표시된 컨트롤러 템플릿 이름을 포함합니다. 컨트롤러 템플릿을 가져오면, 컨트롤러 템플릿에 주어진 이름은 파일 이름과 관계없이 *.json 파일에서 가져옵니다. 이 가져온 컨트롤러 템플릿이 가져온 파일 이름이 아닌 다른 이름을 가질 수 있음을 의미합니다. 컨트롤러 템플릿이 같은 이름을 갖는 것을 방지하기 위해 내보내기 전에 템플릿에 고유한 이름을 주고, 파일 이름은 변경하지 않는 것을 권장합니다.
시스템 관리탭으로 작업하기
ToolsTalk 2에 있는 시스템 관리 탭 은 왼쪽 메뉴 모음에 있으며 다음 기능을 제공함:
시스템 관리 탭 | 설명 |
|---|---|
| 컨트롤러 소프트웨어 및 데이터 관리 모든 컨트롤러에 대한 소프트웨어 업데이트를 관리합니다. 컨트롤러를 사용자 지정 섹션에 구성합니다. |
| 예약된 작업 컨트롤러 구성은 예약된 간격으로 내보내기 및 가져오기를 할 수 있습니다. |
| 구성 비교 내보낸 파일 2개에 대한 일대일 비교. |
| 기능 관리 시스템 (FMS: Functionality Management System) 연결된 컨트롤러 간에 라이선스 기능의 배포를 관리합니다. |
| 사용자 그룹 ToolsTalk 2 정보를 보거나 편집할 다양한 권한을 여러 사용자 그룹에 줄 수 있습니다. |
컨트롤러 소프트웨어 및 데이터 관리
컨트롤러 결과와 설정을 내보냅니다.
컨트롤러 설정을 가져옵니다.
새 컨트롤러 소프트웨어를 불러옵니다.
컨트롤러 소프트웨어 설치 간에 전환합니다.
보고서를 생성합니다.
컨트롤러를 사용자 지정 섹션에 구성합니다.
컨트롤러 구성 매개변수를 내보내고 컨트롤러 프로그램은 변경하지 않은 상태로 둡니다.
새로운 컨트롤러 구성을 가져옵니다.
소프트웨어 업데이트는 컨트롤러의 소프트웨어를 변경합니다. 컨트롤러 이름, IP 주소 및 서버 연결은 수동으로 입력할 수 있습니다.
예약된 작업
컨트롤러 결과와 설정을 내보냅니다.
컨트롤러 설정을 가져옵니다.
선택한 컨트롤러에 대한 내보내기 및 가져오기 작업 일정.
데이터베이스 유지 관리
푸시 컨트롤러 구성
내보내기/가져오기는 컨트롤러의 구성 매개변수를 변경하고, 컨트롤러의 프로그램은 변경하지 않은 채로 둡니다. 컨트롤러 이름, IP 주소와 서버 연결은 이러한 작업의 영향을 받지 않습니다.
기능 관리 시스템
컨트롤러에 라이선스 받은 기능을 추가합니다.
컨트롤러에서 라이선스 받은 기능을 제거합니다.
라이선스 받은 기능의 풀을 관리합니다.
필요한 경우 Atlas Copco에서 추가 기능을 로드하고 더 이상 필요하지 않을 때 기능을 반환합니다.
사용자 그룹
다른 사용자 그룹을 만듭니다.
폴더 및 개별 컨트롤러를 볼 수 있는 권한을 관리합니다.
ToolsTalk 2 기능 구성 권한을 관리합니다.
컨트롤러 매개변수 및 기능 권한을 관리합니다.
컨트롤러 소프트웨어 및 데이터 관리
컨트롤러 소프트웨어 및 데이터 관리 소개
시스템 관리 로 이동하고 컨트롤러 소프트웨어 및 데이터 관리 를 선택합니다.
컨트롤러 결과, 구성, 설정을 내보냅니다.
컨트롤러 설정을 가져옵니다.
새 컨트롤러 소프트웨어를 불러옵니다.
컨트롤러 소프트웨어 설치 간에 전환합니다.
보고서를 생성합니다.
컨트롤러를 사용자 지정 섹션에 구성합니다.
컨트롤러 검색
내보내기/가져오기: 컨트롤러의 구성 매개변수를 변경하고, 컨트롤러의 소프트웨어 프로그램은 변경하지 않은 채로 둡니다.
소프트웨어 업데이트: 컨트롤러의 소프트웨어를 변경하고, 컨트롤러의 구성 매개변수는 변경하지 않은 채로 둡니다.
컨트롤러 이름, IP 주소와 서버 연결은 이러한 작업의 영향을 받지 않습니다.
열 | 설명 |
|---|---|
컨트롤러 | 컨트롤러 이름. |
컨트롤러 유형 | 적용되는 컨트롤러 유형 |
공장 포트 | 켜짐: 공장 포트를 통해 통신이 활성화된 컨트롤러용. 연결이 비활성화인 경우 텍스트가 표시되지 않습니다(컨트롤러 설정에서 꺼짐 설정). |
현재 버전 | 현재 소프트웨어 버전. 적색: 소프트웨어는 승인된 소프트웨어 목록에 없습니다. 추가 명령 버튼을 클릭하여 소프트웨어를 목록에 추가하고 현재 소프트웨어 버전을 입력합니다. 흑색: 소프트웨어는 승인된 소프트웨어 목록에 있습니다. |
저장된 버전 | 저장된 비활성 소프트웨어 버전. |
작동 | 다음과 같은 진행 중인 작업을 표시합니다: 가져오기 및 내보내기 작업 중의 작업 상태 및 결과, 소프트웨어 업데이트 상태 및 결과. |
아래표에 나열된 옵션을 활성화하려면 컨트롤러 이름 왼쪽에 있는 확인란을 선택합니다.
단추 | 설명 |
|---|---|
재시작 | 선택한 컨트롤러를 다시 시작함 |
보고서 생성 | SoftwareVersionReportcsv.csv 파일을 생성하고 저장소 선택을 위한 대화 팝업 창을 엽니다. |
소프트웨어 |
|
내보내기/가져오기 |
|
단추 | 설명 |
|---|---|
수정 | 사용자 지정 섹션을 구성하기 위한 편집 모드를 활성화 및 비활성화합니다. |
+ | 사용자 지정 섹션 폴더 또는 하위 폴더를 추가합니다. 편집 모드에서만 표시됩니다. |
- | 사용자 지정 섹션 폴더 또는 하위 폴더를 삭제합니다. 편집 모드에서만 표시됩니다. |
내보내기 및 가져오기 기능은 컨트롤러 구성 및 예약된 내보내기 및 가져오기
에도 있습니다. 파일 형식과 결과는 동일합니다.
작업 영역 창의 오른쪽은 컨트롤러에서의 실행이 인증된 승인된 소프트웨어 목록이 포함되어 있습니다. 승인되지 않은 소프트웨어는 현재 버전 열에서 빨간색으로 표시됩니다.
명령 | 설명 |
|---|---|
추가 | 목록에 새 소프트웨어 버전을 입력할 수 있는 바로 가기 메뉴를 엽니다. |
삭제 | 목록에서 하나 이상의 선택한 소프트웨어 버전을 제거합니다. |
보고서 생성은 열에 다음 정보 매트릭스를 포함하는 SoftwareVersionReportcsv.csv 파일을 만듦:
컨트롤러 이름.
현재 소프트웨어 버전.
저장된 소프트웨어 버전.
현재 소프트웨어의 승인 여부를 표시합니다.
공장 구조의 컨트롤러를 구성하고 아래의 바로 가기 옵션에 액세스 하려면, 컨트롤러 이름을 클릭하십시오. 컨트롤러 이름의 배경색은 청색으로 변경됩니다.
한 번에 최대 20개의 컨트롤러를 선택할 수 있습니다.
아래 옵션을 사용하려면 컨트롤러를 마우스 오른쪽 버튼으로 클릭하십시오.
바로 가기 메뉴 | 설명 |
|---|---|
새로운 컨트롤러 추가 | 새로운 컨트롤러를 공장 구조 컨트롤러 목록에 추가하십시오. |
컨트롤러 연결 | 컨트롤러 상태를 온라인으로 설정하십시오. |
컨트롤러 연결 끊기 | 컨트롤러 상태를 온라인으로 설정합니다. 컨트롤러 이름은 가로선이 그어진 상태로 표시됩니다. |
작업 상태 재설정 | 컨트롤러 상태를 강제로 재설정합니다. 현재 상태를 해제하고 유휴 상태로 재설정합니다. 이 작업은 시작된 프로세스를 방해하지 않으며 연결이 끊어진 경우 오류 보호 역할을 수행합니다. |
삭제 | 공장 구조 컨트롤러 목록에서 컨트롤러를 삭제합니다. 임의의 컨트롤러가모든 컨트롤러 폴더에서 삭제되면, 영구적으로 삭제됩니다. |
컨트롤러 검색
컨트롤러 소프트웨어 및 데이터 관리 작업 영역에는 두 개의 검색 필드가 있습니다. 한 개의 필드는 사용자 지정 섹션에서 컨트롤러만을 검색할 때 사용하며 다른 한 개의 필드는 컨트롤러 목록에서 모든 컨트롤러를 검색할 때 사용됩니다.
검색 필드에 컨트롤러 이름을 두 글자 이상 입력합니다.
컨트롤러 이름이나 유형을 검색할 수도 있습니다. 주 컨트롤러 목록에서 소프트웨어 버전(현재 버전)을 검색할 수 도 있습니다.
컨트롤러 구성 및 공구 로그의 내보내기 및 가져오기
내보내기/가져오기 기능은 컨트롤러 간 조임 프로그램, 배치 및 컨트롤러 구성을 전송할 수 있을 뿐만 아니라 외부 프로그램에서의 분석을 위해 결과 메뉴에 있는 이벤트 및 조임 결과를 내보내는 데 사용됩니다.
내보내기 명령어는 다음과 같은 이유로 사용할 수 있습니다.
추가 처리를 위해 조임 결과 및 이벤트를 내보내는 경우.
Atlas Copco 서비스 엔지니어로부터 디버그 지원을 위해 로그 파일을 내보내는 경우.
구성을 다른 컨트롤러로 복사하는 데 사용할 수 있는 전체 컨트롤러 구성을 내보내는 경우.
차이를 보기 위해 내보낸 구성 두 개를 비교하는 경우.
컨트롤러 구성 가져오기
내보내기
시스템 관리 탭
 을 선택합니다.
을 선택합니다.컨트롤러 소프트웨어 및 데이터 관리
 로 이동합니다.
로 이동합니다.컨트롤러의 확인란
을 선택합니다. 컨트롤러가 온라인인 경우에만 컨트롤러 구성을 내보낼 수 있습니다.내보내기/가져오기 버튼을 선택하여 다음 중 하나를 내보낼 수 있습니다:
매개변수
설명
Export (내보내기)
모든 컨트롤러 정보를 내보냅니다.
내보낸 파일은 <파일 이름>.tar.gz로 보이는 파일 이름과 확장자가 됩니다.
구성 내보내기
설정 및 구성을 내보냅니다.
내보낸 파일은 <파일 이름>.tar.gz로 보이는 파일 이름과 확장자가 됩니다.
공구 로그 내보내기
로그(조임 및 하드웨어 정보)를 연결된 공구에서 내보냅니다. SRB, TBP 및 STB에서 사용할 수 있습니다.
내보내기는 atlas_tool_i.zip과 ExportInfo.txt로 구성됨
내보내기 파일을 저장할 위치를 선택하고 확인을 선택합니다.
파일 이름은 컨트롤러를 식별하는 부분과 타임 스탬프 부분으로 구성됩니다.
컨트롤러 구성 가져오기
가져오기 명령의 목적은 컨트롤러 설정을 복사하고 이전에 내보낸 소스 파일을 재사용하는 것이며, <파일 이름>.tar.gz로 보이는 파일 이름과 확장자를 가집니다.
왼쪽 메뉴 모음에서 시스템 관리
를 선택합니다.작업 영역 창 상단 메뉴 모음에서 컨트롤러 소프트웨어 및 데이터 관리
를 선택합니다.컨트롤러의 확인란
을 선택합니다. 컨트롤러가 온라인인 경우에만 컨트롤러 구성을 가져올 수 있습니다.내보내기/가져오기를 선택합니다.
선택으로 가져오기 대화 창이 열립니다.
파일 열기를 선택하고 선택한 파일을 검색합니다.
파일을 선택하고 열기를 선택합니다.
파일 경로가 표시되고 가져오기 단추가 활성화됩니다. 가져오기를 선택합니다.
다시 시작한 후 가져온 파일은 새 구성 설정을 사용하게 됩니다.
파일 가져오기는 컨트롤러의 프로그램을 변경하지 않습니다. 공장의 IP 주소를 제외한 모든 설정 및 구성을 변경합니다.
컨트롤러 소프트웨어 업데이트
컨트롤러 소프트웨어 업데이트 및 전환은 서로 연결된 두 개의 다른 작업입니다. 컨트롤러는 액티브 및 패시브의 두 가지 설치된 소프트웨어 버전을 가질 수 있습니다. 이 두 버전 사이를 전환하는 것은 간단합니다. 컨트롤러 소프트웨어 전환은 액티브 및 패시브 소프트웨어를 전환하는 작업입니다.
컨트롤러에 새로운 소프트웨어 로드하기:
시스템 관리 탭
을 선택합니다.컨트롤러 소프트웨어 및 데이터 관리
로 이동합니다.컨트롤러의 확인란
을 선택합니다. 이 컨트롤러가 온라인인 경우에만 컨트롤러 소프트웨어를 업데이트할 수 있습니다.드롭다운 메뉴에서 소프트웨어를 선택한 다음, 소프트웨어 업데이트를 선택합니다.
소프트웨어 업데이트 대화 창이 열립니다.
파일 열기를 선택하고 선택한 파일을 검색합니다.
파일 이름은 -px2it.zip로 끝나야 합니다.
파일을 표시하고 열기를 선택합니다.
파일 경로가 표시되고 소프트웨어 업데이트 단추가 활성화됩니다. 버튼을 클릭하여 소프트웨어 로딩을 시작합니다.
컨트롤러 소프트웨어 전환
컨트롤러 소프트웨어 업데이트 및 전환은 서로 연결된 두 개의 다른 작업입니다. 컨트롤러는 액티브 및 패시브의 두 가지 설치된 소프트웨어 버전을 가질 수 있습니다. 이 두 버전 사이를 전환하는 것은 간단합니다. 컨트롤러 소프트웨어 전환은 액티브 및 패시브 소프트웨어를 전환하는 작업입니다.
컨트롤러에 저장된 소프트웨어를 활성화하기:
왼쪽 메뉴 모음에서 시스템 관리 탭
을 선택합니다.컨트롤러 소프트웨어 및 데이터 관리
 로 이동합니다.
로 이동합니다.컨트롤러에 대하여 확인란
을 선택합니다. 컨트롤러가 온라인인 경우에만 명령을 실행할 수 있습니다.드롭다운 메뉴에서 소프트웨어를 선택한 다음, 저장된 소프트웨어 활성화를 선택합니다.
작업 영역의 소프트웨어 업데이트 열이 표시하는 메시지:
저장된 소프트웨어를 활성화하는 중.
저장된 소프트웨어를 활성화함, 컨트롤러를 다시 시작하는 중.
컨트롤러 소프트웨어 보고서 생성
컨트롤러 업데이트 작업 영역은 모든 컨트롤러와 현재 실행중인 소프트웨어 및 저장된 소프트웨어를 모두 보여줍니다.
파일에 목록 생성하기:
왼쪽 메뉴 모음에서 시스템 관리 탭
을 선택합니다.컨트롤러 소프트웨어 및 데이터 관리
로 이동합니다.보고서 생성을 선택합니다.
브라우저 대화 창이 열립니다.
파일의 위치를 선택하고 저장을 선택합니다.
SoftwareVersionResultcsv.csv 파일이 선택한 위치에 기록됩니다.
사용자 지정 섹션 관리
시스템 관리 탭
으로 이동하고 컨트롤러 소프트웨어 및 데이터 관리 를 선택합니다.사용자 지정 섹션에서 편집을 선택하여
 편집 모드에 들어갑니다. 편집은 해당 메뉴가 선택되었음을 표시하는 밝은 청색으로 변경되며 두 개의 새로운 버튼 +와 -
편집 모드에 들어갑니다. 편집은 해당 메뉴가 선택되었음을 표시하는 밝은 청색으로 변경되며 두 개의 새로운 버튼 +와 -  버튼이 나타납니다.
버튼이 나타납니다.
편집 모드에서는 다음 구성 옵션을 사용할 수 있습니다.
새 폴더 만들기
하위 폴더 만들기
폴더 또는 하위 폴더 삭제
컨트롤러를 폴더에 복사
폴더 및 컨트롤러의 표시 순서 변경
편집 모드를 종료하려면:
편집을 선택하여 편집 모드를 종료합니다. 편집은 색상이 변경되며 + 와 - 버튼이 사라집니다.
새 폴더 만들기
편집 버튼의 왼쪽의, + 버튼을 선택합니다.
또는
폴더 영역에서 아무 곳이나 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 폴더 추가를 선택합니다.
새 폴더가 생성되어 목록에 추가됩니다.
새 폴더를 선택합니다. 색상은 선택된 것을 나타내기 위해 밝은 청색으로 변합니다.
F2키를 누르고, 폴더 이름을 다시 지정한 다음 Enter키를 누릅니다.
하위 폴더 만들기
폴더 이름 오른쪽의 + 버튼을 클릭합니다.
또는
기존 폴더를 마우스 오른쪽 버튼으로 선택하고 바로 가기 메뉴에서 폴더 추가를 선택합니다.
새 폴더가 생성되어 목록에 추가됩니다.
새 폴더를 선택합니다. 색상은 선택된 것을 나타내기 위해 밝은 청색으로 변합니다.
F2키를 누르고, 폴더 이름을 다시 지정한 다음 Enter키를 누릅니다.
폴더 또는 하위 폴더 삭제
폴더 이름 오른쪽의 - 버튼을 선택합니다.
또는
기존 폴더를 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 삭제를 클릭합니다.
폴더가 삭제되고 컨트롤러의 복사본이 제거됩니다.
하위 폴더가 포함된 폴더를 삭제하면, 모든 하위 폴더도 삭제됩니다.
컨트롤러를 폴더에 복사
컨트롤러 목록 위의 드롭다운 메뉴에서, 모든 컨트롤러, 또는 적절한 사용자 지정 섹션을 선택합니다.
컨트롤러를 선택합니다. 선택된 것을 나타내기 위해 밝은 청색으로 변합니다.
하나 이상의 컨트롤러를 선택할 수 있습니다.
Ctrl+ 마우스 왼쪽 버튼 클릭으로 셀렉션에 한 번에 하나의 컨트롤러를 추가합니다.
Shift+ 마우스 왼쪽 버튼 클릭으로 셀렉션에 한 번에 여러 개의 컨트롤러를 추가합니다.
대상 폴더로 선택된 컨트롤러를 끌어서 놓습니다.
폴더 및 컨트롤러의 순서 변경
선택한 폴더 또는 컨트롤러를 새 위치로 끌어서 놓습니다.
예약된 작업
시스템 관리 탭으로 이동하고 예약된 작업  을 선택합니다. 작업 영역은 다음 정보를 표시합니다.
을 선택합니다. 작업 영역은 다음 정보를 표시합니다.
열 | 설명 |
|---|---|
확인란 | 확인란에 사용하여 작업을 선택합니다. |
이름 | 작업 유형. |
마지막 변경 | 최신 변경에 대한 타임 스탬프 |
변경자: | 작업 변경자... |
최종 실행 | 작업이 실행된 마지막 시점입니다. |
실행 중 | 현재 실행 중인 작업의 상태 정보를 표시합니다. |
명령 | 설명 |
|---|---|
지금 실행 | 예약된 날짜 및 시간을 기다리지 않고, 하나 이상의 작업을 선택하고 즉시 실행하도록 강제할 수 있습니다. 백업 위치 설정을 정의해야 '지금 실행'이 작동됩니다. |
추가 | 새 작업을 만듭니다. 작업 유형을 선택합니다. |
삭제 | 작업 테이블에서 하나 이상의 작업을 삭제합니다. |
오른쪽에 있는 컨트롤러 목록은 어떤 컨트롤러가 예약된 작업의 영향을 받는지 표시합니다. 작업을 한 개 이상 선택했을 때만 목록이 표시됩니다.
예약된 작업 관리
시스템 관리
로 이동합니다.예약된 작업
으로 이동합니다.
기존 작업을 두 번 클릭하여 구성을 볼 수 있습니다.
메뉴 | 설명 |
|---|---|
속성 | 작업에 이름과 설명을 제공합니다. |
일정 | 작업에 대한 시간과 간격 설정. |
컨트롤러 | 어떤 컨트롤러가 작업의 영향을 받는지 선택합니다. |
결과 | 작업의 결과입니다. |
파일 가져오기 | 작업 유형이 컨트롤러 구성 가져오기일 때만 보입니다. |
백업 위치 | 작업 유형이 내보내기 컨트롤러 구성인 경우에만 보입니다. |
새로운 예약 작업을 추가하기
추가를 선택합니다.
예약된 작업 유형을 선택합니다:
컨트롤러 구성 내보내기
컨트롤러 구성 가져오기
데이터베이스 유지 관리
푸시 컨트롤러 구성
라이선스 배포 내보내기
지금 실행
해당 확인란을 선택하여 작업을 선택합니다.
작업을 즉시 실행하기 위해 지금 실행을 선택합니다.
예약된 작업 삭제하기
해당 확인란에 표시하여 작업을 선택하고, 선택한 작업을 제거하려면 삭제를 선택합니다.
삭제된 작업은 예약된 작업 목록에서 제거됩니다.
예약된 작업 편집하기
편집할 작업을 더블 클릭합니다.
예약된 작업을 편집합니다.
변경 사항이 자동으로 저장되고, 더 푸시가 필요하지 않습니다.
또한 내보내기 및 가져오기 기능은 컨트롤러 구성 및 컨트롤러 소프트웨어 및 데이터 관리 에 존재합니다. 파일 형식과 결과는 두 경우 모두 동일합니다.
컨트롤러 선택
가져오기, 내보내기 및 푸시 컨트롤러 구성 예약 작업에 유효합니다.
예약된 작업을 실행할 컨트롤러를 선택합니다.
매개변수 | 설명 |
|---|---|
모든 컨트롤러 예약 | 예로 설정하는 경우, 예약된 작업이 ToolsTalk 2에 연결되고 공장 구조 예로 설정하면 컨트롤러 목록이 표시되지 않습니다. 아니오로 설정하면 컨트롤러 목록이 표시되며 개별 선택이 가능합니다. |
모두 전환 | 모든 컨트롤러가 자동으로 표시되고 작업은 모든 컨트롤러에서 실행됩니다. 개별 컨트롤러의 선택은 취소할 수 있습니다. |
| 예약된 작업을 실행할 컨트롤러를 선택합니다. 이 작업은 선택한 컨트롤러에만 영향을 줍니다. |
모두 전환과 모든 컨트롤러 예약 사이의 중요한 차이점:
모두 전환 |
|---|
개별 컨트롤러를 선택하거나 선택 해제하기가 쉽습니다. 정적 목록입니다. 새로운 컨트롤러가 추가된 경우, 자동으로 포함되지 않습니다. |
모든 컨트롤러 예약 |
|---|
연결된 컨트롤러의 구조 변경은 모든 컨트롤러에서 예약된 작업을 변경하지 않습니다. 동적 목록으로서 모든 컨트롤러는 항상 영향을 받습니다. |
중요 공지:
가져오기가 같은 가져오기 파일을 사용하여 다수의 컨트롤러에 적용된 경우, 컨트롤러 이름 필드는 가져온 파일의 컨트롤러 이름으로 덮어씁니다. 모든 컨트롤러가 동일한 이름을 갖게 됩니다.
이름이 더 이상 인식되지 않을 수 있으므로 이름을 지정한 컨트롤러에 대한 추가적 가져오기 또는 내보내기는 실패합니다.
이 문제를 극복하는 한 가지 방법은 모든 컨트롤러 예약 스위치를 예로 설정하는 것입니다.
컨트롤러 구성 내보내기
예약된 작업 유형이 컨트롤러 구성 내보내기로 선택되면 이 메뉴를 볼 수 있습니다.
매개변수 | 설명 |
|---|---|
백업 위치 | 내보내기 파일이 기록 될 위치에 대한 올바른 경로를 입력합니다. 기본값은 비어 있으며, 오류 표시기 예약된 작업이 실행될 때 경로가 유효해야 합니다. |
파일 이름 | 내보낸 파일 형식: *.tar.gz 그것은 나중에 컨트롤러에 구성을 가져오기 위해 사용하거나 디버깅 목적 또는 실패 분석을 위해 Atlas Copco에 보낼 수 있습니다. 기본 파일 이름은 PFExport_<controller-name>_<Date-code>.tar.gz 형식입니다. 시스템 변수는 차별화하고 고유한 파일 이름을 만드는 데 사용할 수 있습니다. |
컨트롤러당 폴더 | 예로 설정하는 경우, 각 내보내기는 별도의 하위 폴더에 저장됩니다. 아니요로 설정하면 내보내기는 저장 위치 폴더에 저장됩니다. |
폴더 이름 | 시스템 변수는 차별화하고 고유한 폴더 이름을 만드는 데 사용할 수 있습니다. |
시스템 변수는 내보내기를 위한 파일 이름과 폴더 이름을 지정하는 데 사용할 수 있습니다. 런타임에 추가되어 파일 이름 또는 폴더에 추가되어 고유한 내보내기 파일 또는 위치를 만듭니다.
시스템 변수는 괄호 내부에 작성되며, 다음이 사용될 수 있음:
[ControllerName]
[IpAddress]
[ControllerSerialNumber]
시스템 변수와 텍스트를 결합할 수 있습니다. 예: Station_3_[ControllerName]_[IpAddress]. 컨트롤러 이름이 ABC이고 IP 주소가 10.25.25.180인 경우, 런타임에 생성되는 파일 이름은 Station_3_ABC_10.25.25.180.tar.gz가 될 것입니다.
내보낼 때 컨트롤러가 온라인이고 내보내기 경로가 유효한 경우에만 예약된 파일 내보내기가 발생할 수 있습니다.
매개변수 | 설명 |
|---|---|
켜짐 | 예로 설정하는 경우, 예약된 작업이 예약된 구성에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 실행되지 않습니다. |
평일 | 작업을 실행할 평일을 하나 이상 표시합니다. |
Time (시간) | 드롭-다운 메뉴에서 실행 시간을 선택합니다. |
시작 날짜 | 캘린더 아이콘에서 실행 시간의 시작 날짜를 선택합니다. |
종료 날짜 선택 | 예로 설정하는 경우, 예약된 작업이 종료 날짜까지 일정에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 시작 날짜의 일정에 따라 실행됩니다. |
작업이 실행된 후, 결과는 결과 메뉴에 표시됩니다.
매개변수 | 설명 |
|---|---|
Status (상태) | 작업 실행 후 예약된 작업 상태는 OK 또는 NOK를 표시할 수 있습니다. |
컨트롤러 | 작업에 대해 사용할 수 있는 경우에만 표시됩니다. |
최종 실행 | 예약된 작업이 실행된 시간과 날짜. |
Error (오류) | 상태가 NOK인 경우 오류 코드의 예는 다음과 같습니다.
|
컨트롤러 구성 가져오기
예약된 작업 유형이 컨트롤러 구성 가져오기로 선택되면 이 메뉴를 볼 수 있습니다.
메뉴 항목 | 설명 |
|---|---|
파일 이름 | 파일과 이름은 이전에 내보낸 구성 파일이어야 합니다. 요구되는 형식: *.tar.gz |
찾아보기 | 이 명령은 가져오기 파일을 찾을 수 있는 브라우저 창을 엽니다. |
가져오기 파일은 ToolsTalk 2에 로드되고, 예약된 작업이 구성된 시간에 실행됩니다.
파일 가져오기는 컨트롤러의 프로그램을 변경하지 않습니다. 공장의 IP 주소를 제외한 모든 설정 및 구성을 변경합니다.
가져올 때 컨트롤러가 온라인인 경우에만 예약된 파일 가져오기가 발생할 수 있습니다.
매개변수 | 설명 |
|---|---|
켜짐 | 예로 설정하는 경우, 예약된 작업이 예약된 구성에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 실행되지 않습니다. |
평일 | 작업을 실행할 평일을 하나 이상 표시합니다. |
Time (시간) | 드롭-다운 메뉴에서 실행 시간을 선택합니다. |
시작 날짜 | 캘린더 아이콘에서 실행 시간의 시작 날짜를 선택합니다. |
종료 날짜 선택 | 예로 설정하는 경우, 예약된 작업이 종료 날짜까지 일정에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 시작 날짜의 일정에 따라 실행됩니다. |
작업이 실행된 후, 결과는 결과 메뉴에 표시됩니다.
매개변수 | 설명 |
|---|---|
Status (상태) | 작업 실행 후 예약된 작업 상태는 OK 또는 NOK를 표시할 수 있습니다. |
컨트롤러 | 작업에 대해 사용할 수 있는 경우에만 표시됩니다. |
최종 실행 | 예약된 작업이 실행된 시간과 날짜. |
Error (오류) | 상태가 NOK인 경우 오류 코드의 예는 다음과 같습니다.
|
데이터베이스 유지 관리
컨트롤러 구성, 라이브러리, 조임 프로그램, 장치 설정, 결과 등의 이벤트가 자동으로 데이터베이스 내에서 이전에 저장된 이벤트에 추가됩니다. 공간 절약 및 시스템 효율성 증가를 위해 데이터베이스를 지우기 위해 기록 데이터를 삭제하고 모든 이벤트의 최신 결과만 보관할 수 있습니다. 데이터베이스 유지 관리 기능으로 모든 이벤트의 최신 결과의 "스냅샷" 기록을 예약할 수 있습니다.
데이터 보관: 데이터베이스에 기록 데이터를 저장(보관)하려면 예를 선택합니다. 아니요를 선택하면 기록 데이터는 각 스냅샷 후에 삭제됩니다. 기록한 스냅샷의 결과는 관계 없이 저장합니다.
한 번에 하나의 데이터베이스 유지 관리 작업 유형의 인스턴스만 정의할 수 있습니다.
매개변수 | 설명 |
|---|---|
켜짐 | 예로 설정하는 경우, 예약된 작업이 예약된 구성에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 실행되지 않습니다. |
평일 | 작업을 실행할 평일을 하나 이상 표시합니다. |
Time (시간) | 드롭-다운 메뉴에서 실행 시간을 선택합니다. |
시작 날짜 | 캘린더 아이콘에서 실행 시간의 시작 날짜를 선택합니다. |
종료 날짜 선택 | 예로 설정하는 경우, 예약된 작업이 종료 날짜까지 일정에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 시작 날짜의 일정에 따라 실행됩니다. |
작업이 실행된 후, 결과는 결과 메뉴에 표시됩니다.
매개변수 | 설명 |
|---|---|
Status (상태) | 작업 실행 후 예약된 작업 상태는 OK 또는 NOK를 표시할 수 있습니다. |
컨트롤러 | 작업에 대해 사용할 수 있는 경우에만 표시됩니다. |
최종 실행 | 예약된 작업이 실행된 시간과 날짜. |
Error (오류) | 상태가 NOK인 경우 오류 코드의 예는 다음과 같습니다.
|
푸시 컨트롤러 구성
예약된 작업 유형이 푸시 컨트롤러 구성 에 선택되면 이 메뉴를 볼 수 있습니다.
매개변수 | 설명 |
|---|---|
켜짐 | 예로 설정하는 경우, 예약된 작업이 예약된 구성에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 실행되지 않습니다. |
평일 | 작업을 실행할 평일을 하나 이상 표시합니다. |
Time (시간) | 드롭-다운 메뉴에서 실행 시간을 선택합니다. |
시작 날짜 | 캘린더 아이콘에서 실행 시간의 시작 날짜를 선택합니다. |
종료 날짜 선택 | 예로 설정하는 경우, 예약된 작업이 종료 날짜까지 일정에 따라 실행됩니다. 아니요로 설정하면, 예약된 작업이 시작 날짜의 일정에 따라 실행됩니다. |
작업이 실행된 후, 결과는 결과 메뉴에 표시됩니다.
매개변수 | 설명 |
|---|---|
Status (상태) | 작업 실행 후 예약된 작업 상태는 OK 또는 NOK를 표시할 수 있습니다. |
컨트롤러 | 작업에 대해 사용할 수 있는 경우에만 표시됩니다. |
최종 실행 | 예약된 작업이 실행된 시간과 날짜. |
Error (오류) | 상태가 NOK인 경우 오류 코드의 예는 다음과 같습니다.
|
라이선스 배포 백업
이 예약된 작업은 정기적으로 라이선스 배포 백업을 만들 때 사용됩니다. 백업은 ToolsTalk2 서버에 저장되며 ToolsTalk2 라이선스 다운 그레이드의 경우, 백업을 사용하여 보관된 라이선스와 함께 컨트롤러를 다시 복원할 수 있습니다.
한 번에 하나의 라이선스 배포 백업 작업 유형의 인스턴스만 정의할 수 있습니다.
백업 라이선스 배포 작업 설정
속성
이름
백업용 이름을 입력하십시오.
설명
백업에 대한 설명을 입력하십시오.
일정
켜짐
예로 설정하는 경우, 예약된 작업이 예약된 구성에 따라 실행됩니다.
아니요로 설정하면, 예약된 작업이 실행되지 않습니다.
평일
작업을 실행할 평일을 하나 이상 표시합니다.
Time (시간)
드롭-다운 메뉴에서 실행 시간을 선택합니다.
시작 날짜
캘린더 아이콘에서 실행 시간의 시작 날짜를 선택합니다.
종료 날짜 선택
예로 설정하는 경우, 예약된 작업이 종료 날짜까지 일정에 따라 실행됩니다.
아니요로 설정하면, 예약된 작업이 시작 날짜의 일정에 따라 실행됩니다.
백업 위치
파일 이름
백업할 파일 이름을 입력하십시오.
결과
Status (상태)
작업 실행 후 예약된 작업 상태는 OK 또는 NOK를 표시할 수 있습니다.
최종 실행
예약된 작업이 실행된 시간과 날짜.
Error (오류)
NoWriteAccessToStorage
ExportFailed
TimedOut
백업에서 라이선스 배포 복원
ToolsTalk2 라이선스 다운 그레이드의 경우 라이선스 배포 백업을 사용하여 라이선스 배포를 컨트롤러로 다시 복원할 수 있습니다. 먼저 라이선스 배포 백업을 다운로드한 다음, 다운로드한 백업을 가져오면, 복원이 실행됩니다.
라이선스 배포 백업 다운로드
시스템 관리 탭
을 선택한 다음, 예약된 작업 탭으로 이동합니다.작업 영역에서, 라이선스 배포 백업 작업을 더블 클릭합니다.
결과에서
 을 선택하여 복원할 라이선스 배포 백업을 다운로드합니다.
을 선택하여 복원할 라이선스 배포 백업을 다운로드합니다.다른이름으로 저장 대화 상자에서, 다운로드할 위치를 검색한 다음, 저장을 선택합니다.
라이선스 배포 백업 가져오기
라이선스 배포 가져오기 기능을 사용하여 기능 관리 시스템 탭 을 통해 다운로드한 파일을 가져오기 위해 해당 파일에 액세스할 수 있습니다.
을 통해 다운로드한 파일을 가져오기 위해 해당 파일에 액세스할 수 있습니다.
기능 관리 시스템 (FMS: Functionality Management System)
기능성 관리 시스템 소개
기능성 관리 시스템(FMS)으로 Atlas Copco 고객은 동적 라이선싱 계획을 통해 필요하면 원하는 추가 기능을 사용할 수 있습니다.
구매 주문을 받은 후, Atlas Copco 라이선스 포털(Atlas Copco License Portal, ACLP)에 있는 고객 계정은 자동으로 24시간 내에 구매 기능을 받게 되며, 해당 기능은 라이센스 파일로 다운로드할 수 있습니다.
이러한 기능 파일(라이센스 계약에 포함됨)은 디코딩되고 배포 가능한 로컬 라이선스 서버(Local License Server, LLS)에 로딩됩니다.
기능 풀은 여러 컨트롤러에서 사용할 수 있도록 만들어집니다. 원하는 기능 항목은 필요한 경우 컨트롤러에 업로드할 수 있으며, 더 이상 필요하지 않을 경우 풀로 반환될 수 있습니다.
Atlas Copco 라이선스 포털(Atrals Copco License Portal, ACLP)에서 모든 기능 항목이 있는 계정을 관리할 수 있으며, 라이센스 서버로/서버에서 권한을 부여받고 반환될 수 있습니다.
ACLP의 고객 계정 생성 및 관리는 이 문서에서 다루지 않습니다.
기능 관리 시스템 정의
라이선스 배포 | 기능 |
|---|---|
로컬 라이선스 서버(Local License Server, LLS) | 기능 항목 풀을 보유하는 장치이며, 컨트롤러의 라이선스 관리자에 기능 항목을 배포할 수 있습니다. |
Atlas Copco 라이선스 포털(Atlas Copco License Portal, ACLP) | 고객에게 원하는 모든 기능 항목을 포함하는 라이선스 파일을 전송할 수 있는 장치. |
라이선스 | 기능 항목에 대한 액세스 권한. 라이선스는 기능 항목의 사용 방법에 대한 조건을 제시합니다. |
라이선스 관리자 | 컨트롤러에서 기능 항목을 로드, 관리, 반환합니다. |
가상 스테이션 유형 | 번드로 함께 제공되는 고정된 기능 모음에 대한 라이선스입니다. 가상 스테이션에 전체를 할당할 수 있습니다. |
가상 스테이션 기능 | TurboTight 또는 TrueAngle과 같은 개별 컨트롤러 기능에 대한 라이센스 |
컨트롤러 기능 | 컨트롤러 전체 기능에 대한 라이선스입니다. (예: StepSync 또는 SoftPLC) 이는 컨트롤러별로 할당되며 해당 컨트롤러의 가상 스테이션에 제한되지 않습니다. |
기능 항목 | 추가 기능을 제공하기 위해 컨트롤러에 로드할 수 있는 소프트웨어 코드입니다. 사용 조건은 라이선스 계약이 적용됩니다. |
지능형 애플리케이션 모듈(IAM) | 기억 장치 모듈에는 모든 컨트롤러 프로그램, 구성 및 결과가 포함됩니다. 또한 특정 모듈에는 추가로 로드된 기능 항목이 포함될 수 있습니다. |
예약 목록 | 배포 서버는 기능 항목 풀을 가지고 있습니다. 일부는 컨트롤러에 할당되고 일부는 자유롭게 배포할 수 있습니다. 예약 목록은 기능 항목을 할당하는 방법에 대한 정보가 포함되어 있습니다. |
차입 시간 | 네트워크 배포 환경에서 적용됩니다. 컨트롤러는 주기적으로 LLS에 확인하고 예약 목록의 기능 항목을 동기화해야 합니다. |
만료된 라이선스 | 컨트롤러 구성 또는 프로그램이 변경될 수 있으며, 로드된 기능 항목과 예약 목록의 내용 간에 불일치가 발생할 수 있습니다. 컨트롤러에서 만료된 기능 항목이 사용되는 경우 오류 이벤트가 표시됩니다. |
기능 파일 | ACLP에서 다운로드하는 바이너리 파일. 모든 유효한 기능 항목이 포함되어 있습니다. 디코딩되고 서버에 저장될 때, 기능 항목 풀에서 컨트롤러에 배포할 수 있습니다. |
라이선스 유형 및 기능의 배포 편집하기
사용 가능한 라이선스 유형 및 기능을 컨트롤러에서 추가하거나 제거할 수 있습니다.
시스템 관리 탭
을 선택합니다.기능 관리 시스템 탭
을 선택하여 컨트롤러의 라이선스 분배 개요를 표시합니다.특정 컨트롤러에 대한 편집
 버튼을 선택합니다. 사용 가능한 라이센스 유형 및 기능이 있는 대화 상자 창이 열립니다.
버튼을 선택합니다. 사용 가능한 라이센스 유형 및 기능이 있는 대화 상자 창이 열립니다.각 탭을 선택하여 컨트롤러에서 사용할 수 있는 각 라이선스 유형 또는, 기능의 수를 입력합니다.
확인을 선택하여 저장하고 계속합니다.
라이선스 배포 관리
ToolsTalk2 서버는 마지막으로 성공한 라이선스 배포 상태의 내부 백업을 자동으로 저장합니다. 이 백업은 시스템에서 내보낼 수 있습니다.
호스팅된 Flexera 라이선스 서비스 데이터베이스가 재설정(삭제)된 ToolsTalk2 라이선스 다운 그레이드의 경우, Atlas Copco 고객 라이선스 포털(ACLP:Atlas Copco Customer License Portal)에서 새 라이선스 파일을 생성해야 하며 기능 관리 시스템 탭에 업로드해야 합니다. 데이터베이스를 재설정하면, 라이선스 배포도 재설정되므로 반드시 복원해야 합니다. 라이선스 배포 내보내기/가져오기를 사용하여 복원을 수행할 수 있습니다.
시스탬 관리 탭
을 선택한 다음, 기능 관리 시스템 탭으로 이동합니다.관리 버튼을 선택한 다음, 드롭다운 목록에서 라이선스 배포...를 선택합니다.
내보내기 탭을 선택합니다.
내보내기할 위치를 지정한 다음, 내보내기를 선택합니다.
라이선스 배포를 가져 오려면 라이선스 파일을 먼저 업로드해야 시스템이 배포할 수 있는 라이선스 수를 알 수 있습니다.
시스탬 관리 탭
을 선택한 다음, 기능 관리 시스템 탭으로 이동합니다.관리 버튼을 선택한 다음, 드롭다운 목록에서 라이선스 배포...를 선택합니다.
가져오기 탭을 선택합니다.
가져올 파일의 위치를 검색한 다음, 가져오기를 선택합니다.
 경고 이 작업은 모든 기존 예약을 제거하고 라이선스 배포를 가져온 파일의 상태로 복원합니다.
경고 이 작업은 모든 기존 예약을 제거하고 라이선스 배포를 가져온 파일의 상태로 복원합니다.
기능 항목의 배포
기능 관리 시스템(Funtionality Management System, FMS) 작업 영역에서 사용자는 ToolsTalk 2 서버에 온라인으로 연결되고, 로컬 라이선스 서버(Local License Server, LLS)와 연결된 모든 컨트롤러에서 라이선스 받은 기능 항목을 관리할 수 있습니다.
시스템 관리 탭
을 선택합니다.기능 관리 시스템 탭
을 선택하여 컨트롤러의 라이선스 분배 개요를 표시합니다.
아래의 보기 및 정보는 기능 파일을 Atlas Copco로부터 받았으며, LLS에 로드된 것을 가정합니다.
라이선스 배포 개요
라이선스 배포 개요는 여러 하위 탭으로 구성되며 아래에 설명되어 있습니다.
컨트롤러
컨트롤러 하위 탭에는 컨트롤러들에 배포된 라이선스가 부여된 기능 항목의 풀이 표시됩니다. 더 자세한 개요를 보려면, 특정 행을 선택하여 확장하고 컨트롤러의 현재 기능을 확인할 수 있습니다.
열 | 기능 |
|---|---|
수정 | 컨트롤러에 배포된 라이선스의 수를 수정합니다. |
컨트롤러 | 컨트롤러에 지정된 이름입니다. |
가상 스테이션 유형 | 각 컨트롤러의에 유형별로 배포된 라이선스의 수입니다. |
가상 스테이션 기능 | 각 가상 스테이션에 있는 기능입니다. |
컨트롤러 기능 | 각 컨트롤러에 있는 기능입니다. |
가상 스테이션 유형
가상 스테이션 유형 하위 탭에는 컨트롤러들에 배포된, 라이선스가 인증된 기능 항목의 풀이 표시됩니다.
열 | 기능 |
|---|---|
가상 스테이션 유형 | 라이선스의 유형입니다. |
컨트롤러 이름 | 컨트롤러에 지정된 이름입니다. |
카운트 | 컨트롤러에 배포된 라이선스 기능 유형의 수입니다. |
사용 가능 | 컨트롤러에 배포할 수 있는 라이선스 기능 유형의 수입니다. |
컨트롤러에 | 라이선스가 인증된 기능 유형이 활성화된 컨트롤러의 수입니다. |
예약됨 | 라이선스가 인증된 기능 유형을 보유한 컨트롤러의 수입니다. ToolsTalk 2에서 컨트롤러에 라이센스를 할당하면 라이센스 서버의 해당 컨트롤러에 해당 라이센스가 예약됩니다. 컨트롤러가 라이센스 서버에 연결되고 동기화되면 라이센스는 예약됨 및 컨트롤러 상주 상태가 됩니다. |
총 | 배포할 수 있는 라이선스 기능 유형의 총 수입니다. |
가상 스테이션 기능
가상 스테이션 유형 기능 하위 탭에는 컨트롤러들에 배포된, 라이선스가 인증된 기능 항목의 풀이 표시됩니다.
열 | 기능 |
|---|---|
가상 스테이션 기능 | 기능 유형 |
컨트롤러 이름 | 컨트롤러에 지정된 이름입니다. |
카운트 | 컨트롤러에 배포된 라이선스 기능 항목의 수입니다. |
사용 가능 | 컨트롤러에 배포할 수 있는 라이선스 기능 항목의 수입니다. |
컨트롤러에 | 라이선스가 인증된 기능 항목이 활성화된 컨트롤러의 수입니다. |
예약됨 | 라이선스가 인증된 기능 유형을 보유한 컨트롤러의 수입니다. ToolsTalk 2에서 컨트롤러에 라이센스를 할당하면 라이센스 서버의 해당 컨트롤러에 해당 라이센스가 예약됩니다. 컨트롤러가 라이센스 서버에 연결되고 동기화되면 라이센스는 예약됨 및 컨트롤러 상주 상태가 됩니다. |
총 | 배포할 수 있는 라이선스 기능 항목의 총 수입니다. |
컨트롤러 기능
컨트롤러 기능 열에는 컨트롤러 간에 배포되는 라이선스가 부여된 기능 항목의 풀이 표시되며, 이러한 항목들은 공구 라이선스에 의해 지정됩니다.
열 | 기능 |
|---|---|
컨트롤러 기능 | 기능 유형 |
컨트롤러 이름 | 컨트롤러에 지정된 이름입니다. |
카운트 | 컨트롤러에 배포된 라이선스 기능 항목의 수입니다. |
사용 가능 | 컨트롤러에 배포할 수 있는 라이선스 기능 항목의 수입니다. |
컨트롤러에 | 라이선스가 인증된 기능 항목이 활성화된 컨트롤러의 수입니다. |
예약됨 | 라이선스가 인증된 기능 유형을 보유한 컨트롤러의 수입니다. ToolsTalk 2에서 컨트롤러에 라이센스를 할당하면 라이센스 서버의 해당 컨트롤러에 해당 라이센스가 예약됩니다. 컨트롤러가 라이센스 서버에 연결되고 동기화되면 라이센스는 예약됨 및 컨트롤러 상주 상태가 됩니다. |
총 | 배포할 수 있는 라이선스 기능 항목의 총 수입니다. |
FMS 포터블
FMS 포터블 하위 탭에는 컨트롤러에 배포된 FMS 포터블 장치의 수가 표시됩니다.
열 | 기능 |
|---|---|
FMS 포터블 | FMS 포터블 장치의 ID 번호 |
컨트롤러 이름 | 컨트롤러에 지정된 이름입니다. |
FMS 작업 영역 기능
명령 버튼
명령 버튼 | 기능 |
|---|---|
관리 |
|
기능 파일은 라이선스 항목을 포함하는 바이너리 파일입니다. 이 파일은 Atlas Copco Licensing Portal (ACLP)에서 생성되며 고객이 다운로드 할 수 있습니다. 배포 서버에서 디코딩할 때, 두 가지 방법으로 컨트롤러에 배포할 수 있는 기능 풀이 생성됩니다.
ToolsTalk 2 사용자 인터페이스를 통해 제어되는 기능 관리 시스템 서버를 이용하는 네트워크 배포 시스템.
각 컨트롤러에 삽입되고 컨트롤러 사용자 인터페이스를 통해 관리되는 보안 USB 플래시 드라이브를 사용하는 수동 배포 시스템. 컨트롤러 문서에서 상세히 설명되어 있습니다.
일반 정보
열 | 기능 |
|---|---|
호스트 ID | 기능 파일이 로드되는 배포 서버의 고유 ID. |
ToolsTalk 2 라이센스 | 현재 기능 수준의 이름. |
ToolsTalk 2 가상 스테이션 | 구성에 사용할 수 있는 구성된 가상 스테이션/총 가상 스테이션 수 |
라이선스 유형 및 기능의 배포 편집하기
사용 가능한 라이선스 유형 및 기능을 컨트롤러에서 추가하거나 제거할 수 있습니다.
시스템 관리 탭
을 선택합니다.기능 관리 시스템 탭
을 선택하여 컨트롤러의 라이선스 분배 개요를 표시합니다.특정 컨트롤러에 대한 편집
버튼을 선택합니다. 사용 가능한 라이센스 유형 및 기능이 있는 대화 상자 창이 열립니다.각 탭을 선택하여 컨트롤러에서 사용할 수 있는 각 라이선스 유형 또는, 기능의 수를 입력합니다.
확인을 선택하여 저장하고 계속합니다.
구성 비교하기
비교할 구성 파일을 업로드하여 두 구성을 빠르게 비교할 수 있습니다. 파일을 먼저 내보내야 합니다. 구성 내보내기 수행:
시스템 관리
섹션, 컨트롤러 소프트웨어 및 데이터 관리 .또는:
컨트롤러 섹션
.
두 구성을 비교하기:
시스템 관리 탭
으로 이동하여, 구성 비교  를 클릭합니다.
를 클릭합니다.찾아보기 버튼을 선택하여 파일을 찾고 업로드합니다.
내보낸 파일은 <파일 이름>.tar.gz로 보이는 파일 이름과 확장자가 됩니다.
둘째 찾아보기 버튼을 선택하고 첫 번째 파일과 비교할 파일을 찾습니다.
비교를 선택합니다.
작업 영역은 선택한 두 구성에 대한 매개변수의 목록을 표시합니다. 두 구성에서 동일한 매개변수는 표시되지만 강조 표시되지 않습니다. 다른 파일과 다른 매개변수는 노란색으로 강조 표시됩니다.
사용자 그룹
사용자 그룹 개요
이 기능은 ToolsTalk 2에서 관리자 사용자 권한이 있는 사용자만 볼 수 있습니다.
ToolsTalk 2의 사용자 그룹 기능이 제공하는 기능:
사용자 그룹 생성 또는 삭제.
폴더 및 컨트롤러에 대한 사용자 액세스 권한을 할당합니다.
컨트롤러 구성 및 매개변수 설정을 변경하기 위해 사용자 권리를 할당합니다.
여러 컨트롤러와 ToolsTalk 2 관리 작업에 라이브러리 기능을 배포하기 위해 사용자 권한을 할당합니다.
사용자 그룹 보기:
왼쪽 메뉴 모음에서 시스템 관리
를 선택합니다.상단 메뉴 모음에서 사용자 그룹
 을 선택합니다.
을 선택합니다.
작업 영역 테이블의 각 행은 다른 사용자 권한을 부여할 수 있는 사용자 그룹을 나타냅니다.
왼쪽에서 오른쪽으로 열에 있는 헤더:
열 | 설명 |
|---|---|
확인란 | 사용자 그룹을 선택하거나 선택을 취소합니다. |
이름 | 사용자 그룹 이름. |
설명 | 옵션 필드. |
AD 그룹 | 액티브 디렉터리 그룹 이름입니다. IT 부서가 만들었습니다. |
| 실제 열이 아닙니다. 구성 목록은 알파벳, 숫자, 시간 기준으로 오름 또는 내림 순서로 정렬할 수 있습니다. 화살표 표시하고 현재의 정렬 방향을 변경하려면 화살표를 클릭하여 테이블 머리글 행을 클릭합니다. 하나의 화살표는 한 번에 표시됩니다. |
테이블의 맨 위 행의 이름은 관리자입니다. 이 사용자 그룹은 삭제할 수 없습니다.
명령 | 설명 |
|---|---|
추가 | 새 사용자 그룹을 생성합니다. 대화 창이 열립니다. |
삭제 | 그룹 테이블에서 한 개 이상의 사용자 그룹을 삭제합니다. |
사용자 그룹 필수 전제 조건
ToolsTalk 2에서 여러 사용자 그룹을 만들 수 있습니다. 각 사용자 그룹은 ToolsTalk 2 매개변수, 구성, 폴더의 생성, 읽기, 갱신, 삭제에 대한 다른 사용자 권한을 부여 받을 수 있습니다.
회사 IT 부서에서 네트워크 관리자는 하나 이상의 액티브 디렉터리(AD) 그룹을 만들어야 합니다. AD 그룹은 ToolsTalk 2의 한 사용자 그룹에 할당할 수 있습니다. ToolsTalk 2의 각 사용자 그룹은 고유한 사용자 권한 한 세트를 받을 수 있습니다.
따라서, ToolsTalk 2의 모든 사용자 권한 조합에 대하여 한 개의 AD 그룹을 만들어야 합니다. 개별 사용자는 한 개 이상의 AD 그룹에 할당됩니다. 사용자 그룹의 모든 구성원은 ToolsTalk 2에서 동일한 권한을 가지고 있습니다.
예를 들어, 다음과 같은 네 가지 그룹을 생성함:
-
라인 1에 작업자.
-
라인 1에 대한 라인 매니저.
-
공장 생산 엔지니어.
-
생산 품질 관리자.
개별 사용자는 그룹 중 하나 이상에 할당됩니다.
또한 ToolsTalk 2에서 4개의 사용자 그룹을 만듭니다(동일한 그룹 이름 사용). 각 사용자 그룹에 대하여 한 AD 그룹이 할당됩니다. 다음 사용자 권한을 생성함:
-
라인 1의 작업자. 라인 1의 조임 결과만 볼 수 있으며, 구성 매개변수를 변경할 수 없습니다.
-
라인 1의 라인 매니저. 모든 컨트롤러를 볼 수 있으며 라인 1 컨트롤러에 대한 구성 매개변수를 변경할 추가 사용자 권한을 가지고 있습니다.
-
공장 생산 엔지니어는 라인 1과 라인 2의 모든 구성 매개변수를 변경할 수 있지만, 모든 조임 결과를 볼 수는 없습니다.
-
생산 품질 관리자. 공장 전체의 모든 조임 결과 및 이벤트 로그를 볼 수 있습니다.
사용자 그룹 생성, 삭제 또는 편집
왼쪽 메뉴 모음에서 시스템 관리 아이콘
을 선택합니다.상단 메뉴 모음에서 사용자 그룹 아이콘
을 선택합니다.작업 영역 창은 사용자 그룹의 테이블을 보여줍니다.
사용자 그룹을 삭제하려면 확인란
을 선택하고 삭제를 클릭합니다.표의 행에서 사용자 그룹을 두 번 클릭하여 사용자 권한을 편집합니다. 작업 영역 구성 메뉴를 보여줍니다.
새로운 사용자 그룹을 추가하려면 추가를 클릭합니다. 그룹 생성 팝업 창이 나타나고 다음 매개변수를 입력해야 함:
사용자 그룹 이름.
선택적 사용자 그룹 설명입니다.
기존 AD 그룹의 이름.
추가를 선택하여 저장하고 창을 닫습니다.
작업 영역 창은 사용자 그룹의 업데이트된 표를 보여줍니다.
열 | 설명 |
|---|---|
이름 | 사용자 그룹의 ToolsTalk 2 이름 |
설명 | 옵션 정보 필드. |
AD 그룹 | IT 부서가 만든 액티브 디렉터리 그룹의 이름입니다. ToolsTalk 2 서버 액세스 사용자 권한이 있어야 하는 개별 사용자를 포함합니다. |
사용 설정 예/아니오 | 수퍼 관리자 계정에만 유효합니다. 이 기능은 다운 그레이드 도중 사용자 그룹을 삭제하지 않고 비활성화합니다.
업그레이드 후 사용 설정을 예로 설정하지 않으면 해당 그룹의 특정 사용자들에 대한 클라이언트는 시작되지 않으며 "응용 프로그램에 액세스할 수 있는 권한이 없습니다"라는 경고가 표시됩니다. |
사용자 그룹 권한 메뉴
왼쪽 메뉴 모음에서 시스템 관리 아이콘
을 선택합니다.상단 메뉴 모음에서 사용자 그룹 아이콘
을 선택합니다.작업 영역 창은 사용자 그룹의 테이블을 보여줍니다.
표의 한 행을 더블 클릭하여 사용자 그룹을 편집할 수 있습니다.
그룹 권한 메뉴는 사용자 권한 설정을 위한 세 탭이 있습니다.
열 | 설명 |
|---|---|
폴더 | 공장 구조의 폴더에 액세스하고 수정할 수 있는 사용자 권한을 할당합니다. |
컨트롤러 | 선택한 폴더의 컨트롤러에 액세스하고 수정할 수 있는 사용자 권한을 할당합니다. |
글로벌 기능 | ToolsTalk 2 시스템 관리 작업 및 글로벌 라이브러리 기능을 수행하기 위해 사용자 권한을 할당합니다. |
폴더 탭을 선택하고 사용자 그룹이 액세스할 폴더를 선택합니다.
폴더가 보이지 않는 경우, 폴더에 포함된 컨트롤러는 접근할 수 없습니다.
컨트롤러 탭을 선택하고, 컨트롤러에서 그룹이 가진 사용자 권한을 선택합니다.
컨트롤러가 표시되는 경우, 모든 구성 및 매개변수를 읽을 수 있습니다.
글로벌 기능 탭을 선택하고 사용자 그룹이 액세스할 ToolsTalk 2의 글로벌 기능을 선택합니다.
폴더 사용자 권한
사용자 권한의 첫째 단계는 공장 구조 폴더에서 액세스 가능한 것을 할당하는 것입니다.
왼쪽 메뉴 모음에서 시스템 관리 아이콘
을 선택합니다.상단 메뉴 모음에서 사용자 그룹 아이콘
을 선택합니다.작업 영역 창은 사용자 그룹의 테이블을 보여줍니다.
테이블의 한 행을 두 번 클릭하여 편집 메뉴를 표시합니다.
그룹 권한 메뉴에서 원하는 탭을 클릭합니다.
선택한 사용자 그룹에 대하여 원하는 사용자 권한을 설정합니다. 선택된 확인란
이 기능이 활성화되어 있음을 나타냅니다.가능한 조합은 표에 설명되어 있습니다.
변경 사항이 자동으로 저장됩니다.
공장 구조는 모든 컨트롤러라는 이름의 폴더를 포함합니다. 이 폴더는 ToolsTalk 2 서버에 연결되어 있는 모든 컨트롤러를 포함합니다.
사용자 지정 폴더 및 하위 폴더는 향상된 가시성과 컨트롤러의 논리적 그룹을 위해 만들 수 있습니다.
매개변수 | 설명 | 조건 |
|---|---|---|
모든 폴더에 대한 동일한 권한 | 라디오 단추 표시하면 선택한 사용자 권한이 공장 구조의 모든 폴더에 적용됩니다(신규 포함). | 표시되지 않은 경우: 공장 구조가 변경되는 경우, 특정 폴더에 대한 사용자 권한을 업데이트할 필요가 있습니다. |
각 폴더에 대한 권한 수동 설정 | 표시하면 선택한 사용자 권한은 공장 구조에서 선택한 폴더에만 적용할 수 있습니다. | |
읽기 | 확인란 사용자 그룹은 폴더와 그 내용을 볼 수 있습니다. | 표시되지 않은 경우: 폴더와 그 내용은 사용자 그룹에서 보이지 않습니다. |
업데이트 | 확인란 사용자 그룹은 컨트롤러를 폴더로 이동, 복사, 삭제할 수 있습니다. | |
만들기 및 삭제 | 확인란 폴더에 대한 만들기 및 삭제 권한을 통해 사용자는 폴더 내에 하위 폴더를 만들고 삭제할 수 있습니다. 폴더 모든 컨트롤러에 대한 폴더의 만들기 및 삭제 권한을 통해 사용자는 ToolsTalk 2에서 컨트롤러를 삭제할 수 있습니다. 모든 폴더(새 폴더 포함)에 대한 만들기 및 삭제 권한을 통해 사용자는 기본 폴더를 삭제할 수 있는 가능성도 가지고 있습니다. |
사용자 권한 표시가 없는 폴더는 공장 구조 내에서 사용자 그룹에 보이지 않습니다.
폴더에 대한 최소 사용자 권한 수준은 읽기입니다. 이 수준은 폴더를 표시하고, 하위 폴더 내용과 컨트롤러도 볼 수 있습니다.
컨트롤러가 표시되는 경우, 그 구성 및 매개변수는 적어도 읽을 수 있습니다. 추가 사용자 권한은 사용자 그룹에 할당할 수 있습니다.
컨트롤러 사용자 권한
사용자 권한의 둘째 단계는 그룹이 공장 구조 에서 액세스할 수 있는 선택된 컨트롤러에 대해 가지고 있는 권한을 할당하는 것입니다.
컨트롤러가 표시되는 경우, 구성 및 매개변수를 읽을 수 있습니다. 추가로 지정된 사용자 권한을 사용자 그룹에 부여할 수 있습니다.
왼쪽 메뉴 모음에서 시스템 관리 아이콘
을 선택합니다.상단 메뉴 모음에서 사용자 그룹 아이콘
을 선택합니다.작업 영역 창은 사용자 그룹의 테이블을 보여줍니다.
테이블의 한 행을 두 번 클릭하여 편집 메뉴를 표시합니다.
그룹 권한 메뉴에서 원하는 탭을 클릭합니다.
선택한 사용자 그룹에 대하여 원하는 사용자 권한을 설정합니다. 선택된 확인란
이 기능이 활성화되어 있음을 나타냅니다.가능한 조합은 표에 설명되어 있습니다.
변경 사항이 자동으로 저장됩니다.
매개변수 | 설명 | 조건 |
|---|---|---|
모든 컨트롤러에 대한 동일한 권한 (신규 포함) | 라디오 단추 표시하면 선택한 사용자 권한이 공장 구조에서 보이는 모든 컨트롤러에 적용됩니다(신규 포함). | 표시되지 않은 경우: 예를 들어 새로운 컨트롤러가 추가되어 공장 구조가 변경되는 경우, 컨트롤러에 대한 사용자 권한을 업데이트할 필요가 있습니다. |
각 컨트롤러에 대한 권한 수동 설정 | 라디오 단추 표시된 경우, 선택한 사용자 권한은 공장 구조에서 선택한 컨트롤러에만 적용됩니다. | |
업데이트 | 확인란 사용자 그룹 구성원의 권한:
| |
만들기 및 삭제 | 확인란 만들기 및 삭제 사용자 그룹 구성원의 권한:
| |
| 폴더를 열고 내용을 표시합니다. | |
 | 폴더를 닫고 내용을 숨깁니다. | |
(X/Y) | 총 Y개의 컨트롤러 중에서 X개의 컨트롤러가 표시된 폴더에 있고, 선택된 권한을 가지고 있음 |
사용자 권한 표시가 없는 폴더는 공장 구조 내에서 사용자 그룹에 보이지 않습니다.
폴더에 대한 최소 사용자 권한 수준은 읽기입니다. 이 수준은 폴더를 표시하고, 하위 폴더 내용과 컨트롤러도 볼 수 있습니다.
컨트롤러가 표시되는 경우, 그 구성 및 매개변수는 적어도 읽을 수 있습니다. 추가 사용자 권한은 사용자 그룹에 할당할 수 있습니다.
글로벌 기능 사용자 권한
사용자 권한의 셋째 단계는 ToolsTalk 2 글로벌 기능에서 액세스 가능한 것을 할당하는 것입니다.
왼쪽 메뉴 모음에서 시스템 관리 아이콘
을 선택합니다.상단 메뉴 모음에서 사용자 그룹 아이콘
을 선택합니다.작업 영역 창은 사용자 그룹의 테이블을 보여줍니다.
테이블의 한 행을 두 번 클릭하여 편집 메뉴를 표시합니다.
그룹 권한 메뉴에서 원하는 탭을 클릭합니다.
선택한 사용자 그룹에 대하여 원하는 사용자 권한을 설정합니다. 선택된 확인란
이 기능이 활성화되어 있음을 나타냅니다.가능한 조합은 표에 설명되어 있습니다.
변경 사항이 자동으로 저장됩니다.
사용자 그룹이 만들기 및 삭제 사용자 권한 수준이 있는 경우, 모든 컨트롤러 구성을 만들고 편집할 수 있습니다.
글로벌 기능은 왼쪽 메뉴에 아이콘이 있는 ToolsTalk 2 관리 기능 및 라이브러리 기능의 그룹입니다. 사용자 그룹은 글로벌 기능에 대한 다른 사용자 권한을 받을 수 있습니다.
기능에 대하여 사용자 권한 허용되지 않은 경우, 이 기능은 사용자가 액세스할 수 없고 아이콘은 사용자로부터 숨겨져 있습니다.
기능 | 선택 | 설명 |
|---|---|---|
글로벌 기능: 보고  | ||
결과  | 켜짐 | 표시된 경우, 사용자 그룹이 선택한 컨트롤러에 대한 결과 작업 영역을 볼 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
이벤트 | 켜짐 | 표시된 경우, 사용자 그룹이 선택한 컨트롤러의 이벤트 작업 영역을 볼 수 있습니다 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
기능 | 선택 | 설명 |
|---|---|---|
글로벌 기능: 시스템 관리  | ||
예약 내보내기 및 가져오기 | 켜짐 | 표시된 경우, 사용자 그룹은 예약된 내보내기 및 가져오기의 매개변수를 보고 구성할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
컨트롤러 소프트웨어 및 데이터 관리 | 켜짐 | 표시된 경우, 사용자 그룹은 선택한 컨트롤러에 대한 소프트웨어 업데이트를 보고 구성할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
기능 관리 시스템 | 켜짐 | 표시된 경우, 사용자 그룹은 라이선스 받은 기능을 관리하고 선택한 컨트롤러에서 기능을 제거할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
사용자 그룹 관리 | 켜짐 | 표시된 경우, 사용자 그룹은 사용자 그룹의 사용자 권한을 보고 구성할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
프로그램 승인
| 켜짐 | 표시된 경우, 사용자 그룹은 승인을 위해 프로그램을 전송하고 또한 프로그램을 승인 또는 거부할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
기능 | 선택 | 설명 |
|---|---|---|
글로벌 기능: 라이브러리  | ||
컨트롤러 구성 라이브러리 프로그램 라이브러리 구성 라이브러리 필드버스 라이브러리 | 읽기 | 표시된 경우, 사용자 그룹은 매개변수를 보고 구성할 수 있습니다. 표시되지 않은 경우, 아이콘이 ToolsTalk 2에 표시되지 않습니다 |
컨트롤러 구성 라이브러리 프로그램 라이브러리 구성 라이브러리 필드버스 라이브러리 | 업데이트 | 표시된 경우, 사용자 그룹은 라이브러리 내에서 매개변수를 보고 구성할 수 있습니다. 라이브러리에 구독한 컨트롤러는 자동으로 업데이트됩니다. |
컨트롤러 구성 라이브러리 프로그램 라이브러리 구성 라이브러리 필드버스 라이브러리 | 만들기 및 삭제 | 표시된 경우, 사용자 그룹 생성, 라이브러리 구성을 편집하고 삭제할 수 있습니다. 라이브러리에 구독한 컨트롤러는 자동으로 업데이트됩니다. |
컨트롤러 구성 라이브러리 프로그램 라이브러리 구성 라이브러리 필드버스 라이브러리 | 배포 | 표시된 경우, 사용자 그룹 생성, 라이브러리 구성을 편집하고 삭제할 수 있습니다. 라이브러리에 구독한 컨트롤러는 자동으로 업데이트됩니다. 또한, 배포 사용자 권한은 사용자 그룹이 이전에 라이브러리 구성에 구독하지 않은 컨트롤러에 글로벌 구성을 배포할 수 있게 합니다. 글로벌 구성은 영향을 받는 컨트롤러에서 생성됩니다. |
프로그램 승인
이 섹션에서는 프로그램을 조임 또는 풀기 위한 승인 프로세스에 대해 설명합니다. 프로그램 승인은 승인 권한이 있는 사용자가 관리하며 Power Focus 6000, PF6 FlexSystem 및 StepSync 컨트롤러에 적용됩니다.
승인을 위한 프로그램 전송
공장 구조 작업 영역
에서 컨트롤러를 선택합니다.도구 모임에서, 조임 프로그램
을 선택합니다.조임 프로그램 개요는 조임 프로그램의 목록을 보여줍니다.
승인을 위해 전송해야 하는 프로그램의 확인란을 선택합니다.
컨트롤러로 푸시된 프로그램만 승인을 위해 전송할 수 있습니다.
관리를 선택한 다음, 승인을 위한 전송을 선택합니다.
이제 프로그램이 표시되고 프로그램 승인
 탭에서 승인 또는 거부할 준비가 되었습니다.
탭에서 승인 또는 거부할 준비가 되었습니다.
조임 프로그램을 복사하여 붙여넣기 하면 승인 상태가 복사되지 않습니다. 복사된 프로그램은 미지정 상태로 정의됩니다.
프로그램 승인 작업 영역
시스템 관리
로 이동하여 프로그램 승인 을 선택합니다.프로그램 승인 개요에는 보류 중인 프로그램 승인이 있는 컨트롤러의 목록이 표시됩니다.
확장할 컨트롤러를 선택하고 프로그램 목록을 볼 수 있습니다.
열 | 설명 |
|---|---|
확인란 | 확인란을 표시하여 프로그램을 선택합니다. |
이름 | 조임 또는 풀기 프로그램의 이름입니다. |
마지막 변경 | 최종 변경으로서 ToolsTalk 2 시간으로 표현됩니다. |
변경자: | 마지막으로 변경한 사용자를 나타냅니다. |
마지막 승인 | 프로그램에 대한 마지막 승인으로서, 컨트롤러 시간으로 표현됩니다. |
마지막 승인자: | 프로그램을 마지막으로 승인한 사용자를 나타냅니다. |
승인 상태 | 프로그램의 승인 상태입니다. |
승인 상태
Status (상태) | 설명 |
|---|---|
한정되지 않음 | ToolsTalk 2 소프트웨어 및 컨트롤러에서 생성된 모든 새 프로그램의 상태는 정의되지 않습니다. |
승인 보류 | 프로그램은 승인을 위해 전송되었습니다. |
승인됨 | 프로그램이 승인되었으며 컨트롤러에서 사용될 수 있습니다. |
미승인 | 프로그램이 현재 변경 중/최적화 중입니다. 프로그램이 완료되면, 승인을 위해 프로그램이 전송될 수 있습니다. |
거부됨 | 프로그램이 승인자에 의해 거부되었으며 수정이 필요합니다. |
승인 상태에 관계없이 모든 프로그램을 사용할 수 있습니다. 승인 상태는 프로그램의 작동 기능에 영향을 미치지 않습니다.
프로그램이 승인 워크 플로에 들어가면, 상태가 지정됩니다. 승인을 위해 전송된 적이 없는 프로그램만 "미지정" 상태를 표시합니다.
프로그램 승인 또는 거부
프로그램 승인 사용자 권한이 있는 사용자만 승인을 위해 전송된 프로그램을 승인하거나 거부할 수 있습니다. 이 기능은 라이선스 레벨 라인 관리자에서만 사용할 수 있습니다.
시스템 관리
로 이동하여 프로그램 승인 을 선택합니다.프로그램 승인 개요에는 보류 중인 프로그램 승인이 있는 컨트롤러의 목록이 표시됩니다.
확장할 컨트롤러를 선택하고 프로그램 목록을 볼 수 있습니다.
승인/거부하려는 프로그램의 확인란을 선택하십시오.
관리를 선택하고 승인 또는 거부를 선택합니다.
푸시 구성 변경으로 작업하기
ToolsTalk 2는 ToolsTalk 2 서버에 연결되고, 각 컨트롤러마다 미러된 데이터를 포함합니다. 데이터는 최초 연결 시, 재연결 시, 컨트롤러 또는 웹 인터페이스에서 구성 적용 시 컨트롤러에서 ToolsTalk 2로 복사됩니다.
ToolsTalk 2에서 컨트롤러로 흐르는 데이터는 자동으로 전송되지 않습니다. 작업자는 변경 적용을 위해 컨트롤러로 데이터를 푸시해야 합니다.
오프라인인 컨트롤러는 ToolsTalk 2애플리케이션으로 구성 설정 또는 매개변수 값을 변경할 수 있고, 데이터는 저장되고 나중에 푸시될 수 있습니다.
구성 설정이 ToolsTalk 2에서 변경되는 경우, Push 표시기가 구조 목록에 있는 컨트롤러 이름 및 변경된 조임 프로그램 옆에서 나타납니다.
컨트롤러의 온라인 또는 오프라인 여부와 관계없이 ToolsTalk 2 인터페이스에서 구성을 적용할 수 있습니다.
구성은 온라인 상태에서만 컨트롤러에 푸시할 수 있습니다. 컨트롤러가 오프라인인 경우, 명령은 무시됩니다.
푸시는 동시에 여러 컨트롤러에 적용될 수 있습니다.
푸시 명령이 성공적으로 실행되는 한, 표시기
가 사라집니다.
구성을 컨트롤러에 푸시하기
변경 사항을 컨트롤러에 푸시하는 다양한 방법이 있습니다:
컨트롤러 목록에서 컨트롤러 이름 옆에 있는 푸시 표시기 아이콘
을 선택합니다.
탭 메뉴에서 관리 버튼을 선택한 다음, 드롭다운 목록에서 푸시 변경을 선택합니다.
상단 정보 모음에서 푸시 변경 버튼을 선택합니다.
선택 후 푸시할 컨트롤러 대화 창이 나타납니다.
구성을 푸시하는 선택적 방법:

A
모든 구성을 한 번에 푸시하기 위해 이 확인란을 선택합니다. 이 목록에 있는 모든 컨트롤러에 적용됩니다.
B
선택한 컨트롤러에 대한 모든 구성이 푸시됩니다. 해당 확인란을 표시하여 컨트롤러를 선택합니다.
C
컨트롤러에 대한 구성 목록을 확장하고 푸시할 구성을 선택합니다. 선택한 것을 푸시한 후에 나머지 구성은 여전히 목록에 있습니다.
푸시 명령 단추(D)를 선택합니다.
취소를 선택하거나 창을 닫아 종료합니다.
컨트롤러 구성 되돌리기
ToolsTalk 2 애플리케이션의 변경 사항은 자동으로 저장됩니다. 푸시 기호 는, 컨트롤러에 변경을 적용했지만, 아직 컨트롤러로 푸시되지 않은 것을 나타냅니다.
관리를 선택한 다음 드롭다운 메뉴에서 되돌리기를 선택합니다.
컨트롤러 되돌리기 경고 대화 상자에서, 확인을 선택하여 컨트롤러 구성을 되돌리거나 취소를 선택하여 되돌리기 프로세스를 취소할 수 있습니다.
되돌리기 작업은 선택된 컨트롤러에 대하여 ToolsTalk 2에 저장되어 있는 모든 구성을 제거합니다. 되돌리기 작업은 선택한 컨트롤러에 대한 모든 차단을 제거합니다. 컨트롤러나 웹 인터페이스의 모든 변경 사항은 평소와 같이 데이터베이스에 복사됩니다.
보고
이 섹션에서는 사용 가능한 보고서에 대해 학습할 수 있습니다.
결과 및 이벤트
ToolsTalk 2는 컨트롤러 GUI에 있는 작은 화면보다 더 자세한 조임 결과를 표시하는 기능이 있습니다.
조임이 완료되는 즉시 컨트롤러 조임 결과가 자동으로 컨트롤러에서 ToolsTalk 2로 전송됩니다.
컨트롤러는 또한 추가 처리 및 통계 분석을 위해 ToolsNet 8에 조임 결과를 전송하는 옵션을 가집니다.
ToolsTalk 2에서 결과를 보고, 한 번에 한 컨트롤러에서 보고를 생성할 수 있습니다. 각 작업은 한 개의 결과로 표시됩니다. 단일 조임은 주요 매개변수 또는 조임 그래프로 테이블의 결과를 표시할 수 있습니다. 배치 시퀀스는 실행된 순서로 모든 개별 조임을 나타냅니다.
통계 분석 결과, 결과 필터링, 조임 분석은 ToolsNet 8을 사용하여 수행할 수 있습니다. 이 작업을 수행하는 방법에 대한 자세한 내용은 ToolsNet 8 문서에 설명되어 있습니다.
아이콘 | 설명 |
|---|---|
 | 작업 영역이 선택된 컨트롤러에서 조임 결과를 표시합니다. 결과는 테이블 형식 및 그래픽 추적으로 표시할 수 있습니다. |
 | 컨트롤러 이벤트는 설정 |
결과 탭 작업
조임 결과는 더 분석하기 위해 개별적으로 또는 집합적으로 선택할 수 있는 압축된 목록에 표시됩니다.
NOK 상태의 결과만 보려면 각 페이지 하단에 NOK 결과만 표시를 선택하십시오.
조임 결과
GUI 부분 | 설명 |
|---|---|
홀딩 핀 | 홀딩 핀 아이콘을 선택하여 결과를 고정된 탭에 고정합니다. |
추적 아이콘 | 추적 작업 공간에서 결과의 그래픽 뷰를 보려면 추적 아이콘을 선택하세요. |
저장 아이콘 | 이 명령은 결과 데이터를 사용하여 zip 파일을 생성합니다. 팝업 대화 창은 원하는 위치에 파일을 저장하기 위해 열립니다. |
션트 교정 | 션트 교정이 표시되는 경우 나타납니다. |
전체 상태 | 조임의 전체 상태, OK 또는 NOK. |
유형 | |
가상 스테이션 이름 | 가상 스테이션의 이름입니다. |
동기화 모드 인덱스 및 이름 | 조임에 사용된 동기화 모드의 인덱스 및 이름 |
타임스탬프 | 시간과 날짜를 표시하는 조임의 타임 스탬프입니다. |

채널 결과
각 채널의 전체 결과는 다음과 같은 내용으로 보고됩니다:
GUI 부분 | 설명 |
|---|---|
추적 | 추적 작업 공간에서 결과의 그래픽 뷰를 보려면 추적 아이콘을 선택하세요. |
Save (저장) | 이 명령은 결과 데이터를 사용하여 csv 파일을 생성합니다. 팝업 대화 창은 원하는 위치에 파일을 저장하기 위해 열립니다. |
볼트 이름 | 볼트의 번호와 이름 동기화 모드 > “동기화 모드의 이름" > 볼트 구성 > 볼트 및 볼트 이름: 경로를 찾아 설정하십시오. |
상태 | 조임의 전체 상태, OK 또는 NOK. |
다단계 이름 | 조임 프로그램의 이름입니다. 조임 및 멀티스텝 프로그램 > “조임 프로그램의 이름" > 기본 설정 > 이름: 경로를 찾아 설정하십시오. |
채널 | 채널 번호 |
목표 각도 | 목표 각도는 조임을 수행하기 위해 사용되는 조임 전략에 대해 구성된 목표 각도 값을 표시합니다. |
최종 각도 | 마지막 조임 단계의 실제 측정 각도는 이 매개변수를 보고하는 마지막 조임 단계에 위치한 스텝 모니터 피크 각도입니다. |
최종 토크 | 조임의 최종 토크. 이 매개변수를 보고하는 것은 마지막 조임 단계에 위치한 스탭 모니터 피크 토크입니다. |
목표 토크 | 목표 토크. |
경과 시간 | 조임 시작부터 끝까지의 시간. |
션트 교정 | 션트 교정 데이터를 표시하려면 이 아이콘을 선택하십시오. |
단계 결과
다단계 조임 프로그램의 각 단계는 데이터를 보고합니다. 이 데이터의 대부분은 단계 도중 모니터 및 제한에서 오기 때문에 올바른 유형의 모니터 또는 제한이 구성된 경우에만 보고됩니다.
단계 결과 매개변수 | 설명 |
|---|---|
단계 | 단계의 번호입니다. |
상태 | 단계, OK 또는 NOK의 상태. |
단계 유형 | 다단계 프로그램의 단계 유형입니다. |
경로 | 프로그램에서 단계가 위치한 곳, 즉 조임 경로, 수리 또는 종료 경로에 있는 위치를 표시합니다. |
피크 토크 (Nm) | 내부 파손시 일감소된 토크를 포함한 측정된 최종 토크 일반적으로 피크 토크는 차단 토크보다 높습니다. |
경과 시간 | 조임 시작부터 끝까지의 시간. |
각도 |
|
결과 보고자
목록에는 결과 보고자의 값이 표시됩니다. 프로그램 모니터/제한에 대해 정의된 결과 보고자가 있는 경우 해당 모니터/제한의 값이 보고됩니다. 프로그램 모니터/제한에 대해 정의된 결과 보고자가 없는 경우, 주요 경로에서 가장 최근에 실행된 결과 보고자의 값이 보고됩니다.
프로그램에 동일한 유형의 보고자가 여러개로 정의된 경우 평가 순서는 다음과 같습니다.
프로그램 모니터/프로그램 제한에 대한 결과 리포터.
주 경로에서 마지막으로 실행된 단계의 모니터/모니터링에 대한 결과 보고자.
해당 결과 보고자가 설정한 다단계 결과의 최고 레벨의 값은 다음과 같습니다.
결과 보고자 최종 각도에 의해 설정된 최종 각도
결과 보고자 최종 토크에 의해 설정된 최종 토크
결과 보고자 전류에 의해 설정된 전류
추적
활성 상태인 경우, 결과에서 추적 아이콘을 클릭하십시오.  . 결과 그래프가 표시됩니다. 여러 추적을 선택하여 동시에 여러 추적 곡선을 볼 수 있습니다.
. 결과 그래프가 표시됩니다. 여러 추적을 선택하여 동시에 여러 추적 곡선을 볼 수 있습니다.
추적 작업 영역은 하나 또는 여러 조임 결과를 그래픽 정보로 보여줍니다.
작업 공간에서 마우스 휠을 사용하여 확대하거나 축소합니다. 또는 확대할 영역을 선택할 수 있습니다. 뒤로 이동하려면 추적 영역을 더블 클릭하십시오.
예:
확대할 영역을 선택하세요:
추적을 이동하려면, 마우스의 휠 버튼을 누릅니다.

추적 그래프에서 선택한 축 유형을 기반으로 델타 정보를 표시할 수 있습니다. 비교할 두 지점을 마우스 오른쪽 버튼으로 클릭하여 두 지점 사이에 델타를 표시합니다. 지점을 드래그하여 타겟을 수정합니다.
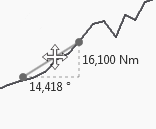
델타를 드래그하여 이동하거나 삭제를 눌러 삭제합니다.
추적 설정/기본 설정 | 설명 |
|---|---|
표시 한계 | 하나의 곡선이 표시되면 이 확인란을 선택하세요. 조임 프로그램에서 한계 값이 사용된 경우, 해당 한계 값이 표시될 수 있습니다. |
최소/최대 표시 | 측정된 최소 또는 최대 값을 표시합니다. |
피크 동기화 | 다른 곡선들이 동일하게 보일 수 있지만 그래프에서 다르게 배치됩니다. 이 옵션은 곡선의 오버레이를 생성하고 피크 값을 동기화합니다. |
|X-축| | X 축의 절대 값을 표시합니다. |
Y1 | Y1 축에 표시될 정보를 선택합니다.
|
Y2 | Y2 축에 표시될 정보를 선택합니다.
|
Y3 | Y3 축에 표시될 정보를 선택합니다.
|
X | X 축에 표시될 정보를 선택합니다.
|
모든 Δ 제거하기 | 모든 델타를 제거합니다. |
저장... | 이 명령은 그래픽 영역의 상을 생성합니다. 팝업 대화 창은 원하는 위치에 파일을 저장하기 위해 열립니다. 기본 파일 이름은 export.png입니다. |
모두 제거하기 | 이 버튼은 추적 플롯 영역을 지웁니다. 추적은 결과에 여전히 있으며 "실시간 결과" 작업 영역에서 다시 액세스할 수 있습니다. |
션트 교정
결과에서 션트 교정 아이콘
 을 클릭하여 션트 교정 매개변수를 구합니다.
을 클릭하여 션트 교정 매개변수를 구합니다.
각 공구는 조임 전에 션트 교정 및 제로 오프셋 보정을 수행합니다.
|
|
|---|---|
다단계 이름 | 공구가 실행하는 조임 프로그램의 이름입니다. |
이득 | 측정된 제로 토크에 비례합니다. |
게인 차이 | 이전 보정과 비교된 게인 차이입니다. |
게인 한계 높음 | 측정된 제로 토크에 비례하는 상한값입니다. |
게인 한계 낮음 | 측정된 제로 토크에 비례하는 하한값입니다. |
게인 최대 변경 | 이전 교정과 비교하여 변경될 수 있는 최대 게인양입니다. |
오프셋 | 이상적인 제로 토크와 비례하는 서명된 오프셋입니다. |
오프셋 차이 | 이전 교정과 비교한 오프셋 차이입니다. |
오프셋 한계 높음 | 이상적인 제로 토크와 비례하는 상한값입니다. |
오프셋 한계 낮음 | 이상적인 제로 토크와 비례하는 하한값입니다. |
오프셋 한계 낮음 | 이상적인 제로 토크에 대한 하한값입니다. |
오프셋 최대 변경 | 이전 교정과 비교하여 변경될 수 있는 오프셋의 최대량입니다. |
션트 실패함 | 참 또는 거짓 |
제로 오프셋 실패함 | 참 또는 거짓 |
고정 - 조사를 위한 유지 영역
조임 결과는 일시적으로 고정 영역에 저장될 수 있습니다. 이것은 조임의 상세한 분석에 유용하고, 새로운 결과를 받을 때 창에서 조임 결과가 사라지는 것을 방지할 수 있습니다.
수동으로: 결과에서, 핀 아이콘
 을 클릭합니다.
을 클릭합니다.조임 결과는 조사를 위해 고정 영역에 복사됩니다. 여러 결과를 임시 저장소에 고정할 수 있습니다.
자동화: 자동 핀 드롭다운 메뉴를 선택하고 핀으로 고정할 결과의 수를 입력합니다. 시작을 선택합니다. 다음 수신 결과는 입력한 횟수에 도달하거나 또는 정지를 누를 때까지 계속 자동으로 고정됩니다.
고정된 영역에서 모든 결과를 제거함
핀 아이콘 .을 클릭하여 고정 해제함으로써 각각의 결과를 제거합니다.
실시간 결과
컨트롤러는 작업이 완료되는 즉시 ToolsTalk 2에 조임 결과를 전송하고, 결과는 실시간 결과의 상단에 추가됩니다. 제한된 수의 결과가 저장될 수 있습니다. 목록이 가득 차면 가장 오래된 결과가 목록에서 삭제됩니다.
최상위 수준에서 여러 채널과 동기화된 조임 결과는 다음 정보를 포함합니다.
GUI 부분 | 설명 |
|---|---|
빨간색 막대 | 실시간 결과 표의 가장 왼쪽 위치에는 오류를 신속하게 식별할 수 있도록 도우며 잘못된 조임을 표시하는 빨간색 막대 아이콘 |
홀딩 핀 | 홀딩 핀 아이콘을 선택하여 결과를 고정된 탭에 고정합니다. |
저장 아이콘 | 이 명령은 결과 데이터를 사용하여 .csv 파일을 생성합니다. 원하는 위치에 파일을 저장할 수 있는 대화창이 열립니다. |
추적 아이콘 | 추적 작업 공간에서 결과의 그래픽 뷰를 보려면 추적 아이콘을 선택합니다. |
전체 상태 | OK 또는 NOK. NOK는 신속하게 잘못된 조임을 식별하기 위해, 항상 빨간색 막대 아이콘과 함께 있습니다. |
가상 스테이션 이름 | 가상 스테이션의 이름입니다. |
동기화 모드 인덱스 및 이름 | 조임에 사용된 동기화 모드의 인덱스 및 이름 |
타임스탬프 | 시간과 날짜를 표시하는 조임의 타임 스탬프입니다. |
 이 표시될 수 있습니다. 이는 NOK에 해당합니다.
이 표시될 수 있습니다. 이는 NOK에 해당합니다.이벤트 탭 작업
컨트롤러 이벤트 보기
공장 구조
에서 컨트롤러를 선택합니다. 이벤트
로 이동합니다.
작업 영역은 선택한 컨트롤러에서 이벤트를 보여줍니다. 이벤트는 컨트롤러 작동 상태에서의 변경 사항입니다.
컨트롤러가 온라인 상태인 경우, 각 컨트롤러에 대해 최대 1024개의 최신 수신 이벤트를 ToolsTalk 2 데이터베이스에 저장할 수 있습니다. 그러나 컨트롤러가 오프라인 상태일 때는 해당 시간 동안 발생한 최신 10개의 결과가 저장되고, 컨트롤러가 온라인 상태가 되면 ToolsTalk 2로 전송됩니다.
결과 매개변수 | 설명 |
|---|---|
심각도 | 기호로 표시됩니다. |
날짜 및 시간 | 컨트롤러에 설정된 시간으로 표시됩니다. |
코드 | 이벤트 코드 번호. |
설명 | 이벤트에 대한 설명 |
세부 정보 | 이벤트에 대한 좀 더 자세한 정보. |
가상 스테이션 | 가상 스테이션 이름 |
그룹 | 컨트롤러, 드라이브, 공구 또는 캐리어 |
채널 | 이벤트가 트리거되는 채널입니다. |
캐리어 | 캐리어 번호입니다. |
일련 번호 | 장치의 일련 번호입니다. |
기호 | 설명 |
|---|---|
 | 오류 유형의 이벤트. |
 | 경고 유형의 이벤트. |
 | 정보 유형의 이벤트. |
심각도 유형
이벤트는 세 범주, 즉 정보, 경고 및 오류로 구분됩니다.
정보 이벤트
정보 이벤트는 사용자 또는 시스템에 의해 수행된 조치에서 발생한 주목할 만한 이벤트를 표시합니다. 정보 이벤트는 특정한 사용자 조치를 요구하지 않습니다.
사용자 또는 시스템에 의해 수행된 조치에서 발생한 주목할 만한 이벤트를 표시합니다. 정보 이벤트는 특정한 사용자 조치를 요구하지 않습니다.
경고 이벤트
경고 이벤트는 시스템 성능에 영향을 미치거나 부상을 초래할 수 있는 잠재적으로 심각한 상태를 표시합니다.
시스템 성능에 영향을 미치거나 부상을 초래할 수 있는 잠재적으로 심각한 상태를 표시합니다.
오류 이벤트
오류 이벤트 s는 사용자로 하여금 계속하기 위해 설정 또는 구성을 변경하도록 하는 심각한 상태(서비스 고장 등)를 표시합니다.
컨트롤러 이벤트 알림 추가
이 섹션에서는 다른 컨트롤러 이벤트에 대해 알림을 활성화하는 방법에 대해 설명해 드립니다. 특정 컨트롤러 이벤트에 대한 알림을 받으시려면 설정 메뉴의 이벤트 하위 탭에서 해당 이벤트에 대한 로그 및 디스플레이 확인란을 선택해야 합니다.
작업 영역의 오른쪽 상단을 선택해
주세요.ToolsTalk 2 사용자 설정 대화 상자에서 모든 알림을 꺼짐으로 전환하거나 다음 알림을 활성화하도록 선택할 수 있습니다.
모두 표시
오류 및 경고 표시
오류만 표시
저장과 닫기를 차례대로 선택해 주세요.
설정/이벤트 메뉴에서 활성화된 컨트롤러 이벤트(로그 및 표시 확인란 체크 표시됨) 및 ToolsTalk 2 사용자 설정에서 선택한 값(오류, 경고 또는 둘 다)에 따라, 연결된 컨트롤러에서 수신된 모든 이벤트는 수신될 때마다 또는 항상 컨트롤러 이벤트 알림 창에 표시됩니다.
목록에서 컨트롤러를 선택하시면 확장되어 해당 컨트롤러와 관련된 모든 알림이 표시됩니다.
각 알림에는 다음 값이 설명되어 있습니다.
항목
설명
심각도
심각도는 아이콘으로 식별됨:
- - 오류
- - 경고
- - 정보
코드
이벤트 코드 식별.
설명
이벤트 코드 설명.
날짜 및 시간
이벤트가 발생한 시간 스탬프, 컨트롤러 시간으로 표시됩니다.
그룹
시스템 설명.
문제 해결 및 서비스
이 섹션에서는 문제 발생시 문제 해결에 도움이 되며 제품을 유지 보수하고 서비스하는 작업에 도움이 되는 정보를 제공해 드립니다.
설치 시 문제 해결
ToolsTalk 2를 업그레이드한 후 ToolsTalk Industrial Technique Host service를 다시 시작합니다.
오류 | 해결책 |
|---|---|
오류 코드 1920 시작하지 못했습니다. 올바른 권한이 있는지 확인합니다. | 데이터베이스 인증 오류. SQL 데이터베이스에서 혼합 모드 인증을 사용하도록 구성해야 합니다. 인증을 해결하기 위해 SQL Management Studio를 사용합니다. 다른 설치 시도를 하기 전에 컴퓨터를 다시 시작할 필요가 있습니다. |
설치 파일을 사용하는 경우, 설치가 이미 되었는지 InstallShield 마법사가 감지합니다. 이전의 설치가 컴퓨터에 존재하는 경우, 이는 감지되지 않을 수 있습니다.
따라서 새 설치를 시작하기 전에 프로그램 및 데이터베이스 카탈로그의 기존 인스턴스를 제거하는 것을 권장합니다.
시작 시 문제 해결
Error (오류) | 해결책 |
|---|---|
애플리케이션이 시작되지만 원하는 컨트롤러를 볼 수 없습니다. | 컨트롤러 네트워크 연결이 올바르지 않습니다. 컨트롤러가 공장 네트워크에 제대로 연결되어 있는지 확인합니다. 네트워크 연결이 사용되면 적용 가능합니다. |
애플리케이션이 시작되지만 원하는 컨트롤러를 볼 수 없습니다. | ToolsTalk 2에 대한 컨트롤러 구성이 올바르지 않습니다. 컨트롤러 구성 내의 서버 연결이 올바른 ToolsTalk 2 서버로 연결되는지 확인합니다. |
ToolsTalk 2를 시작할 때 "네트워크 연결 손실 또는 서버를 사용할 수 없음" 오류 메시지가 표시됩니다. | 클라이언트 애플리케이션이 서버 애플리케이션에 제대로 연결되어 있지 않습니다. 서버 애플리케이션이 시작되었는지 확인합니다. 애플리케이션이 자동으로 시작되어야 합니다. 이렇게 되지 않으면 애플리케이션(제거)을 제거한 후 애플리케이션을 다시 설치하는 것으로 해결될 수 있습니다. |
참고자료
필드버스 신호
입력 신호
시퀀스 중단 - 10012
배치 시퀀스 중단 요청이 수신되면, 배치 시퀀스 기능은 진행 중인 조임 결과를 얻은 후에만 배치 시퀀스를 중단합니다.
SoftPLC의 이름: ABORT_BATCH_SEQUENCE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
배치 감소 - 10002
배치 카운터를 하나씩 점차 줄입니다.
SoftPLC의 이름: BATCH_DECREMENT
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
배치 증가 - 10001
배치 카운터를 하나씩 점차 늘립니다.
SoftPLC의 이름: BATCH_INCREMENT
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
바이패스 조임 프로그램 - 10008
실행 중인 배치 시퀀스에서 다음 조임 프로그램을 건너뜁니다.
SoftPLC의 이름: BYPASS_PSET
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
채널 명령 - 10054
SoftPLC의 이름: CHANNEL_COMMAND
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint32 배열 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
이 신호에는 하위 신호가 포함되어 있습니다. 모든 하위 신호에 대한 내용은 하위신호 - 입력을 참조해 주세요.
필드버스 비활성화 - 10049
필드버스를 비활성화합니다.
SoftPLC의 이름: DISABLE_FIELDBUS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
테스트 볼트 비활성화 - 10057
SoftPLC의 이름: DISABLE_TESTBOLT
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
공구 비활성화 - 30000
신호가 "TRUE"으로 설정되면 공구가 즉시 정지되고 잠깁니다.
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
동적 배치 크기 - 10074
SoftPLC의 이름: DYNAMIC_BATCH_SIZE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 16 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
작동 활성화 - 10055
SoftPLC의 이름: ENABLE_OPERATION
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
PF에 대한 필드버스 비동기식 데이터 - 10077
SoftPLC의 이름:
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint8 배열 | 16 | 2048 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
필드버스 풀기 잠금 - 20021
연결되어 있는 지원되는 부속품에서 신호가 설정된 경우, 풀기 시작 시 가상 스테이션이 잠깁니다.
드라이브 정지 설정으로 인해 필드 버스 풀기 잠금이 True로 설정되면 진행 중인 풀림이 즉시 중단됩니다.
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
필드버스 조임 잠금 - 20020
연결되어 있는 지원되는 부속품에서 신호가 설정된 경우 조임을 시작할 때 가상 스테이션이 잠깁니다.
드라이브 정지 설정으로 인해 필드 버스 조임 잠금이 True로 설정되면 진행 중인 조임이 즉시 중단됩니다.
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
읽기 결과 큐 내보내기 - 30005
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
입력 비트 4 선택 - 10066
SoftPLC의 이름: SEL_INPUT_BIT_4
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
동적 배치 크기의 ID - 10073
SoftPLC의 이름: DYNAMIC_BATCH_SIZE_TPID
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 정수 | 1 | 16 |
TreatZeroAsOne | 상태 | 정수 | 1 | 16 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
풀기 잠금 - 20003
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
조임 잠금 - 20002
디지털 입력으로 조이기 위해 공구가 잠김.
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
공구 잠금 활성화 높음 - 20004
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
낮은 신호 활성 공구 잠금 - 20061
이 신호가 낮을 때 공구를 잠그십시오.
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
마스터 잠금 해제 - 10005
잠금 페이지에서 정의한 대부분의 잠금을 풉니다.
SoftPLC의 이름: MASTER_UNLOCK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
펄스 중단 - 10030
이 신호가 생성되는 경우, 모든 진행 중인 조임 또는 풀기가 정지됩니다. 10024 또는 10072와의 조합으로 사용됩니다.
SoftPLC의 이름: TIGHTENING_STOP_PULSE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
결과 핸드셰이크 Ack (확인 응답 문자) 읽기 - 30004
컨트롤러를 후면 신호 결과 핸드 셰이크 Ack에 사용 가능하도록 필드버스 장치에서 결과 핸드 셰이크 읽기 기능을 활성화해 주세요.
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
모든 식별자 재설정 - 10115
문자열 수신 시퀀스에서 수신된 모든 문자열 식별자를 소스 배치 문자열에서 한 번에 재설정하는 용도로 사용됩니다. 다른 작업에서는 VIN 번호를 삭제합니다.
SoftPLC의 이름: RESET_ALL_IDENTIFIERS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
배치 재설정 - 10003
배치 카운터를 0으로 재설정합니다. OK 배치 없음(nxOK). 배치 OK가 활성화되면, 비활성화됩니다.
SoftPLC의 이름: RESET_BATCH
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
배치 시퀀스 재설정 - 10053
배치 시퀀스를 재설정합니다. 완료 시 공구 잠금 장치로 잠긴 공구를 풉니다.
SoftPLC의 이름: RESET_BATCH_SEQUENCE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
사이클 상태 재설정 - 10056
SoftPLC의 이름: RESET_CYCLE_STATUS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
최신 식별자 재설정 - 10114
문자열 수신 시퀀스에서 수신된 최신 문자열 식별자를 소스 배치 문자열에서 재설정하는 용도로 사용됩니다. 다른 작업에서는 VIN 번호를 삭제합니다.
SoftPLC의 이름: RESET_LATEST_IDENTIFIER
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
시퀀스 상태 재설정 - 10118
배치 시퀀스 완료/OK/NOK 및 시퀀스 중단 신호를 재설정합니다.
SoftPLC의 이름: RESET_SEQUENCE_STATUS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
시스템 오류 재설정 - 10062
SoftPLC의 이름: RESET_SYSTEM_ERROR
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
너무 많은 NOK 재설정 - 10013
너무 많은 NOK 재설정을 받은 후 배치를 재설정합니다.
SoftPLC의 이름: RESET_TOO_MANY_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 선택 - 10020
시퀀스 내에서 소스 조임/배치를 포함한 조임 프로그램을 선택합니다.
SoftPLC의 이름: SELECT_INPUT_VALUE
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 정수 | 1 | 16 |
TreatZeroAsOne | 상태 | 정수 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
입력 및 동적 배치 크기 선택 - 30007
소스 조임 작업에서 "외부 배치 제어"를 실행하면서 특정 "식별자 번호"에 대한 배치 크기를 설정하는 용도로 사용됩니다.
배치 크기는 1~250까지 설정할 수 있습니다.
배치 크기가 0으로 설정되면, 무한 배치로 취급됩니다. 배치가 일단 설정되면, 사용자는 배치를 크기가 없는 상태로 설정을 해제할 수 없습니다.
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 정수 | 16 | 16 |
TreatZeroAsOne | 상태 | 정수 | 16 | 16 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
입력 비트 0 선택 - 10016
SoftPLC의 이름: SEL_INPUT_BIT_0
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 1 선택 - 10017
SoftPLC의 이름: SEL_INPUT_BIT_1
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 2 선택 - 10018
SoftPLC의 이름: SEL_INPUT_BIT_2
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 3 선택 - 10019
SoftPLC의 이름: SEL_INPUT_BIT_3
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 5 선택 - 10067
SoftPLC의 이름: SEL_INPUT_BIT_5
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 6 선택 - 10068
SoftPLC의 이름: SEL_INPUT_BIT_6
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 7 선택 - 10069
SoftPLC의 이름: SEL_INPUT_BIT_7
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 8 선택 - 10070
SoftPLC의 이름: SEL_INPUT_BIT_8
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
입력 비트 9 선택 - 10071
SoftPLC의 이름: SEL_INPUT_BIT_9
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
풀기 선택 - 10029
풀기를 기본 작동 모드로 선택하고 공구 시작 - 10028 신호와 결합하여 사용됩니다.
SoftPLC의 이름: SELECT_LOOSENING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
다음 식별자 번호 선택 - 10116
가상 스테이션의 작업이 다음과 같이 구성된 경우 다음 식별자 번호 선택 신호를 사용할 수 있습니다.
배치 시퀀스
소스 조임
소스 배치
번호 식별자 메소드
번호 식별자 메소드
ST 선택기 구성 기능인 다음 선택 및 이전 선택은 입력 신호인 다음 식별자 번호 선택 및 이전 식별자 번호 선택을 활성화합니다.
가상 스테이션 작업으로 선택된 배치 시퀀스
자유 순서 스위치가 활성화된 경우, 다음 식별자 번호 선택 신호는 선택한 시퀀스 내에서 다른 배치를 선택할 수 있습니다.
배치를 선택하기 전에, 반드시 식별자 번호를 배치에 할당해야 합니다. 배치에 식별자 번호를 할당하지 않은 경우, 자유 순서 스위치가 활성화되어 있더라도, "다음 식별자 번호 선택" 신호는 선택을 할 수 없습니다.
이 신호는 구성된 식별자 번호를 가진 배치들 사이에서 루핑하게 됩니다.
식별자 번호가 "없음"인 경우, 식별자 번호가 구성된 모든 배치가 완료된 후에만 선택할 수 있습니다.
루핑이 가능하지만, 0은 건너뜁니다. 배치가 완료되면, 더 이상 선택할 수 없습니다.
예를 들어, 식별자 번호 1,2,4,5가 할당된 배치의 경우, 신호는 루핑됩니다. 배치가 완료될 때까지 1,2,4,5,1,2,4...로 계속 루핑됩니다.
가상 스테이션 작업으로 선택된 소스 조임
신호는 소스 조임 작업에 지정된 조임 프로그램 목록에서 다음 식별자 번호를 선택합니다.
선택은 현재 선택된 식별자 번호에서 다음 더 큰 식별자 번호까지 실행됩니다.
가장 큰 식별자 번호가 선택되면, 이 신호는 0을 선택합니다. 0 이후에는, 신호는 다음의 더 큰 식별자 번호를 선택합니다.
식별자 번호로 0을 선택하면, 공구가 잠깁니다.
식별자 번호가 소스 조임 목록에 추가되었지만, 조임 프로그램이 할당되지 않은 경우, 소스 조임 목록을 루핑하는 동안 식별자 번호는 생략됩니다.
조임 프로그램이 식별자 번호에 할당된 후 조임 프로그램 목록에서 제거된 경우에도, 해당 식별자 번호를 선택할 수 있습니다. 이러한 경우, 특정 조임 프로그램이 없기 때문에 공구가 잠깁니다.
선택기 모드 스위치가 확인으로 설정되면 소켓 선택기를 할당하고 구성해야 합니다. 모든 조임 프로그램을 선택할 수 있지만, 실행하기 전에 소켓 선택기에서 적절한 소켓을 들어올려야 합니다.
가상 스테이션 작업으로 선택된 소스 조임
소스 > 배치 시퀀스 > 소스 배치에서 식별자 메소드가 번호로 설정되면, "다음 식별자 번호 선택 신호"는 소스 배치 작업에 표시되는 시퀀스 목록에서 시퀀스를 선택합니다.
0을 루핑하는 것이 가능합니다. "다음 식별자 번호 선택 신호"는 시퀀스에 할당된 식별자 번호 만 선택합니다.
예를 들어, 식별자 번호 1,2,4 및 8과 함께 사용 가능한 4개의 시퀀스가 있는 경우, "다음 식별자 번호 선택 신호"는 1,2,4,8,0,1,2...를 반복하여 선택합니다.
정의되지 않은 식별자 번호는 선택되지 않습니다.
소스 > 배치 시퀀스 > 소스 배치에서, 식별자 메소드가 문자열로 설정된 경우, 외부 소스(스캐너 또는 오픈 프로토콜 등)를 통해 시퀀스를 선택해야 합니다. "다음 식별자 번호 선택 신호"는 선택된 시퀀스 내에서 배치를 선택할 수 있습니다.
SoftPLC의 이름: SELECT_NEXT_ID_NUMBER
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
이전 식별자 번호 선택 - 10117
가상 스테이션의 작업이 다음과 같이 구성된 경우 "이전 식별자 번호 선택 신호"를 사용할 수 있습니다.
배치 시퀀스
소스 조임
소스 배치
번호 식별자 메소드
번호 식별자 메소드
ST 선택기 구성 기능인 다음 선택 및 이전 선택은 입력 신호인 다음 식별자 번호 선택 및 이전 식별자 번호 선택을 활성화합니다.
가상 스테이션 작업으로 선택된 배치 시퀀스
자유 순서 스위치가 활성화된 경우, "이전 식별자 번호 선택 신호"는 선택한 시퀀스 내에서 다른 배치를 선택할 수 있습니다.
배치를 선택하기 전에, 반드시 식별자 번호를 배치에 할당해야 합니다. 배치에 식별자 번호를 할당하지 않은 경우, 자유 순서 스위치가 활성화되어 있더라도, "이전 식별자 번호 선택" 신호는 식별자 번호를 선택 할 수 없습니다.
이 신호는 구성된 식별자 번호를 가진 배치들 사이에서 루핑하게 됩니다.
식별자 번호가 "없음"인 경우, 식별자 번호가 구성된 모든 배치가 완료된 후에만 선택할 수 있습니다.
루핑이 가능하지만, 0은 건너뜁니다. 배치가 완료되면, 더 이상 선택할 수 없습니다.
예를 들어, 식별자 번호 1,2,4,5가 할당된 배치의 경우, 신호는 루핑됩니다. 배치가 완료될 때까지 5,4,2,1,5,4,2...로 계속 루핑됩니다.
가상 스테이션 작업으로 선택된 소스 조임
신호는 소스 조임 작업에 지정된 조임 프로그램 목록에서 이전 식별자 번호를 선택합니다.
선택은 현재 선택된 식별자 번호에서 이전의 더 작은 식별자 번호까지 실행됩니다.
가장 작은 식별자 번호가 선택되면, 이 신호는 0을 선택합니다. 0 이후에는, 신호는 다음의 더 작은 식별자 번호를 선택합니다.
식별자 번호로 0을 선택하면, 공구가 잠깁니다.
조임 프로그램이 식별자 번호에 할당된 후 조임 프로그램 목록에서 제거된 경우에도, 해당 식별자 번호를 선택할 수 있습니다. 이러한 경우, 특정 조임 프로그램이 없기 때문에 공구가 잠깁니다.
선택기 모드 스위치가 확인으로 설정되면 소켓 선택기를 할당하고 구성해야 합니다. 모든 조임 프로그램을 선택할 수 있지만, 실행하기 전에 소켓 선택기에서 적절한 소켓을 들어올려야 합니다.
가상 스테이션 작업으로 선택된 소스 조임
소스 > 배치 시퀀스 > 소스 배치에서 식별자 메소드가 번호로 설정되면, "이전 식별자 번호 선택 신호"는 소스 배치 작업에 표시되는 시퀀스 목록에서 시퀀스를 선택합니다.
0을 루핑하는 것이 가능합니다. "이전 식별자 번호 선택 신호"는 시퀀스에 할당된 식별자 번호 만 선택합니다.
예를 들어, 식별자 번호 1,2,4 및 8과 함께 사용 가능한 4개의 시퀀스가 있는 경우, "이전 식별자 번호 선택 신호"는 8,4,2,1,0,8,4...를 반복하여 선택합니다.
정의되지 않은 식별자 번호는 선택되지 않습니다.
소스 > 배치 시퀀스 > 소스 배치에서, 식별자 메소드가 문자열로 설정된 경우, 외부 소스(스캐너 또는 오픈 프로토콜 등)를 통해 시퀀스를 선택해야 합니다. "이전 식별자 번호 선택 신호"는 선택된 시퀀스 내에서 배치를 선택할 수 있습니다.
SoftPLC의 이름: SELECT_PREVIOUS_ID_NUMBER
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
풀기 시작 - 10011
활성 신호가 풀기를 시작합니다. 디지털 입력이 비활성화되면 풀기를 중지해야 합니다.
SoftPLC의 이름: START_LOOSENING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
풀기, 펄스 시작 - 10072
SoftPLC의 이름: SELECT_PREVIOUS_ID_NUMBER
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
조임 시작 - 10010
활성 신호가 조임을 시작합니다. 입력이 비활성화되면 조임을 중지해야 합니다.
SoftPLC의 이름: START_TIGHTENING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
조임 펄스 시작 - 10024
조임이 신호에 따라 시작합니다. 조임이 끝날 때까지, 또는 조임 프로그램에서 30초 타임아웃이 발생할 때까지 실행합니다.
SoftPLC의 이름: TIGHTENING_START_PULSE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
공구 시작 - 10028
활성 신호가 공구를 시동을 겁니다. (기본 작동 모드는 조임입니다) 신호가 비활성화되자마자 공구가 중지되어야 합니다. 풀기 선택 - 10029 신호와 함께 사용됩니다.
SoftPLC의 이름: START_DRIVE_CONTINIOUS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
공구, 펄스 시작 - 10113
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
To SoftPLC - 10065
SoftPLC의 이름: TO_PLC
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint8 배열 | 1 | 1 |
필드버스: FALSE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
완료 시 공구 잠금 해제 - 10051
"완료 시 공구 잠금 장치"로 잠긴 공구를 풉니다
SoftPLC의 이름: UNLOCK_TOOL_ON_COMPLETE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
출력 신호
활성 식별자 문자열 - 186
식별자 문자열이 작업-관리에 의해 수신되고 수락된 경우 설정됩니다. 시퀀스 또는 조임 프로그램도 실행 중이어야 합니다.
소스 배치 문자열이 실행 중인 경우, 모든 스캔을 수신하고 시퀀스가 선택되었을 때 설정됩니다. 이 경우 저장된 위치로 구성된 연결된 문자열이 포함됩니다.
다른 작업 관리에는 "VIN"번호가 포함됩니다.
SoftPLC의 이름: ACTIVE_IDENTIFIER_STRING
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
활성 식별자 문자열 1 - 188
소스 배치-문자열에서 첫 번째로 구성된 문자열에 해당하는 신호입니다.
스캔 시퀀스가 완료되고 시퀀스가 선택되면 활성 식별자 문자열 1 신호가 전송되므로, 식별자 부분이 활성화됩니다.
문자열은 저장된 위치로 필터링됩니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: ACTIVE_ID_STRING_1
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
활성 식별자 문자열 2 - 189
소스 배치-문자열에서 두 번째로 구성된 문자열에 해당하는 신호입니다.
스캔 시퀀스가 완료되고 시퀀스가 선택되면 활성 식별자 문자열 2 신호가 전송되므로, 식별자 부분이 활성화됩니다.
문자열은 저장된 위치로 필터링됩니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: ACTIVE_ID_STRING_2
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
활성 식별자 문자열 3 - 190
소스 배치-문자열에서 세 번째로 구성된 문자열에 해당하는 신호입니다.
스캔 시퀀스가 완료되고 시퀀스가 선택되면 활성 식별자 문자열 3 신호가 전송되므로, 식별자 부분이 활성화됩니다.
문자열은 저장된 위치로 필터링됩니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: ACTIVE_ID_STRING_3
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
활성 식별자 문자열 4 - 191
소스 배치-문자열에서 네 번째로 구성된 문자열에 해당하는 신호입니다.
스캔 시퀀스가 완료되고 시퀀스가 선택되면 활성 식별자 문자열 4 신호가 전송되므로, 식별자 부분이 활성화됩니다.
문자열은 저장된 위치로 필터링됩니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: ACTIVE_ID_STRING_4
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
배치 완료 - 30
배치 카운트는 배치 크기 번호와 동등합니다. 결과는 OK 또는 NOK이 될 수 있습니다.
SoftPLC의 이름: BATCH_COMPLETED
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 완료 NOK - 37
NOK 상태로 배치가 완료됨.
SoftPLC의 이름: BATCH_COMPLETED_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 완료 OK - 36
OK 상태로 배치가 완료됨.
SoftPLC의 이름: BATCH_COMPLETED_OK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 카운트 - 31
배치에서 현재 번호. 디스플레이에서만 볼 수 있습니다.
SoftPLC의 이름: BATCH_COUNT
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
배치 실행 중 - 32
배치 시퀀스의 배치가 실행 중임을 나타냅니다.
SoftPLC의 이름: BATCH_RUNNING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 시퀀스 완료 NOK - 46
NOK 상태로 배치 시퀀스가 완료됨.
SoftPLC의 이름: BATCH_SEQUENCE_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 시퀀스 완료 OK - 45
OK 상태로 배치 시퀀스가 완료됨.
SoftPLC의 이름: BATCH_SEQUENCE_OK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
배치 시퀀스 실행됨 - 48
배치 시퀀스 완료 OK 및 배치 시퀀스 완료 NOK 모두의 사례에서 시퀀스가 실행되었음을 나타냅니다.
SoftPLC의 이름: BATCH_SEQUENCE_COMPLETED
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 이벤트 | 부울 | 1 | 1 |
인버트 | 이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
배치 시퀀스 실행 중 - 47
배치 시퀀스가 실행 중인지의 여부를 나타냅니다.
SoftPLC의 이름: BATCHSEQUENCE_RUNNING
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
볼트 조임 상태 - 79
SoftPLC의 이름: BOLT_TIGHTENING_STATUS
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | uint32 배열 | 32 | 32 |
FordResultStatus | 상태 | 4 | 4 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
이 신호에는 하위 신호가 포함되어 있습니다. 모든 하위 신호에 대한 내용은 하위신호 - 출력을 참조해 주세요.
채널 하드웨어 상태 - 81
SoftPLC의 이름: CHANNEL_HARDWARE_STATUS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint32 배열 | 1 | 64 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
이 신호에는 하위 신호가 포함되어 있습니다. 모든 하위 신호에 대한 내용은 하위신호 - 출력을 참조해 주세요.
채널 조임 상태 - 80
SoftPLC의 이름: CHANNEL_TIGHTENING_STATUS
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | uint32 배열 | 1 | 64 |
FordResultStatus | 상태 | 4 | 4 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
이 신호에는 하위 신호가 포함되어 있습니다. 모든 하위 신호에 대한 내용은 하위신호 - 출력을 참조해 주세요.
구성 버전 - 88
SoftPLC의 이름: CONFIGURATION_VERSION
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
컨트롤러 켜짐 - 42
IO 교환 시작 시 True로 설정합니다.
SoftPLC의 이름: IO_ON
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
현재 실행 중인 배치 - 180
현재 실행 중인 배치의 색인을 순서대로 표시합니다. 소켓 선택기를 사용하면, 소켓이 선택되지 않았거나, 하나 이상의 소켓이 선택되었거나 잘못된 소켓이 선택된 경우 0이 표시됩니다. 배치 모드를 사용하고 배치가 실행 중인 경우, 소스 조임 시 1이 표시됩니다.
SoftPLC의 이름: CURRENT_RUNNING_BATCH_IX
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
사이클 완료 - 77
SoftPLC의 이름: CYCLE_COMPLETE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
사이클 NOK -76
SoftPLC의 이름: CYCLE_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
사이클 OK - 75
SoftPLC의 이름: CYCLE_OK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
사이클 실행 - 78
SoftPLC의 이름: CYCLE_RUNNING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
사이클 시작 준비 - 82
SoftPLC의 이름: CYCLE_READY_TO_START
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
비상 정지 - 20036
SoftPLC의 이름: EMERGENCY_STOP
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
이벤트 코드 - 30001
이벤트가 트리거 될 때 이벤트를 전달합니다. 2 사이클 시간 동안 순간적으로 작동됩니다.
SoftPLC의 이름: EVENT_CODE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 16 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
이벤트 코드 심각도 - 30003
이벤트 코드 심각도는 트리거된 이벤트에 오류 또는 경고에 대한 심각도를 갖고 있을 때 활성화되는 출력 신호입니다.
SoftPLC의 이름: EVENT_CODE_SEVERITY
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
이벤트 발생 - 161
이벤트가 트리거 되었음을 나타냅니다. 이벤트에 ACK가 필요한 경우, 부속품에서만 트리거됩니다.
SoftPLC의 이름: EVENT_PRESENT
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
PF의 필드버스 비동기식 데이터 - 107
SoftPLC의 이름:
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint8 배열 | 48 | 2048 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
필드버스 연결 해제 - 96
SoftPLC의 이름: FIELDBUS_DISCONNECTED
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
From SoftPLC - 10064
PLC에서 부속품으로 데이터를 전송하기 위해 할당된 바이트
SoftPLC의 이름: FROM_PLC
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | uint8 배열 | 8 | 8 |
장치
필드버스:FALSE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
마지막으로 수신한 문자열 - 187
작업-관리에서 식별자를 수신하였을 때 직접 설정합니다.
소스 배치 문자열의 경우, 스캔 프로세스에서 스캔할 때마다 설정되므로, 길이가 일치하지 않아도 스캔할 때마다 변경되어 전송됩니다.
문자열 세트는 문자열에서 "저장된 위치" 만이 아니라 raw format으로 존재합니다.
다른 작업-관리의 경우, 이 신호는 활성 식별자 문자열 신호와 동일합니다.
SoftPLC의 이름: LAST_RECEIVED_ID_STRING
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
풀기가 잠겨 있음 - 28
풀기가 비활성화되었습니다.
SoftPLC의 이름: LOOSENING_IS_LOCKED
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
풀기 NOK - 74
NOK 풀기가 발생함.
SoftPLC의 이름: LOOSENING_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
풀기 OK - 70
OK 풀기가 발생함.
SoftPLC의 이름: LOOSENING_OK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
최대 연속 NOK에 도달함 - 35
최대 간섭성 NOK 조임 카운터에 도달했음을 나타냅니다.
SoftPLC의 이름: MAX_COHERENT_NOK_REACHED
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
시스템 오류 없음 - 83
SoftPLC의 이름: NO_SYSTEM_ERROR
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
시스템 경고 없음 - 102
SoftPLC의 이름: NO_SYSTEM_WARNING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
프로그램 시작 - 132
조임 사이클의 시작 레벨을 정의합니다.
SoftPLC의 이름: PROGRAM_START
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
읽기 결과 큐 내보냈음 - 30006
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
수신된 식별자 1 - 192
소스 배치-문자열에서 첫 번째로 구성된 문자열에 해당하는 신호입니다.
활성 식별자 문자열 1 신호는 문자열이 수신되는 즉시 시스템이 문자열/식별자를 수신하는 순서로 전송됩니다. 강제 순서 스캔으로 실행될 경우, 구성된 순서로 처리되지만, 자유 순서 스캔을 실행할 경우에는, 1이 첫 번째 구성된 문자열이 아니라 첫 번째 수신된 문자열로 전송될 수 있습니다.
문자열은 수신된 Raw 문자열이며 "저장된 위치"가 적용되지 않습니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: RECEIVED_IDENTIFIER_1
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
수신된 식별자 2 - 193
소스 배치-문자열에서 두 번째로 구성된 문자열에 해당하는 신호입니다.
활성 식별자 문자열 2 신호는 문자열이 수신되는 즉시 시스템이 문자열/식별자를 수신하는 순서로 전송됩니다. 강제 순서 스캔으로 실행될 경우, 구성된 순서로 처리되지만, 자유 순서 스캔을 실행할 경우에는, 2가 두 번째 구성된 문자열이 아니라 두 번째 수신된 문자열로 전송될 수 있습니다.
문자열은 수신된 Raw 문자열이며 "저장된 위치"가 적용되지 않습니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: RECEIVED_IDENTIFIER_2
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
수신된 식별자 3 - 194
소스 배치-문자열에서 세 번째로 구성된 문자열에 해당하는 신호입니다.
활성 식별자 문자열 3 신호는 문자열이 수신되는 즉시 시스템이 문자열/식별자를 수신하는 순서로 전송됩니다. 강제 순서 스캔으로 실행될 경우, 구성된 순서로 처리되지만, 자유 순서 스캔을 실행할 경우에는, 3이 세 번째 구성된 문자열이 아니라 세 번째 수신된 문자열로 전송될 수 있습니다.
문자열은 수신된 Raw 문자열이며 "저장된 위치"가 적용되지 않습니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: RECEIVED_IDENTIFIER_3
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
수신된 식별자 4 - 195
소스 배치-문자열에서 네 번째로 구성된 문자열에 해당하는 신호입니다.
활성 식별자 문자열 4 신호는 문자열이 수신되는 즉시 시스템이 문자열/식별자를 수신하는 순서로 전송됩니다. 강제 순서 스캔으로 실행될 경우, 구성된 순서로 처리되지만, 자유 순서 스캔을 실행할 경우에는, 4가 네 번째 구성된 문자열이 아니라 네 번째 수신된 문자열로 전송될 수 있습니다.
문자열은 수신된 Raw 문자열이며 "저장된 위치"가 적용되지 않습니다.
소스 배치 문자열을 실행할 때만 전송됩니다.
SoftPLC의 이름: RECEIVED_IDENTIFIER_4
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
남은 배치 - 33
배치에서 남은 조임. 디스플레이에서만 볼 수 있습니다.
SoftPLC의 이름: REMAINING_BATCH
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
선택한 모드 Id - 72
SoftPLC의 이름: SELECTED_MODE_ID
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 정수 | 1 | 32 |
TreatZeroAsOne | 상태 | 정수 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
선택한 시퀀스 비트 0 - 139
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_0
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 1 - 140
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_1
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 2 - 141
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_2
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 3 - 142
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_3
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 4 - 143
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_4
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 5 - 144
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_5
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 6 - 145
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_6
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 7 - 146
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_7
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 8 - 147
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_8
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 비트 9 - 163
선택한 시퀀스를 보여주는 비트 패턴입니다.
SoftPLC의 이름: SELECTED_SEQUENCE_BIT_9
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: FALSE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: TRUE
선택한 시퀀스 id - 84
선택한 배치 순서의 색인을 표시합니다.
SoftPLC의 이름: SELECTED_BATCH_SEQUENCE_ID
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 정수 | 1 | 16 |
TreatZeroAsOne | 상태 | 정수 | 1 | 16 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
시퀀스 중단 - 160
시퀀스가 중단되었는지의 여부를 나타내는 출력 신호
SoftPLC의 이름: SEQUENCE_ABORTED
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
서비스 표시자 알람 - 137
공구 유지 보수에 구성된 서비스 알람은 공구를 서비스 할 시기를 사용자에게 알리는 메커니즘을 제공합니다.
SoftPLC의 이름: SERVICE_INDICATOR_ALARM
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
시퀀스 크기 - 181
현재 실행 중인 시퀀스의 크기를 표시합니다. 시퀀스가 로드될 때만 설정되고 시퀀스가 완료되면 재설정되지 않습니다.
SoftPLC의 이름: SIZE_OF_RUNNING_SEQUENCE
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: TRUE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
소프트웨어 주 버전 - 86
SoftPLC의 이름: SOFTWARE_MAJOR_VERSION
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
소프트웨어 부 버전 - 87
SoftPLC의 이름: SOFTWARE_MINOR_VERSION
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
소프트웨어 배포 버전 - 85
실행 중인 소프트웨어의 버전
SoftPLC의 이름: SOFTWARE_RELEASE_VERSION
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 32 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
스테이션 준비됨 - 71
가상 스테이션의 준비 상태를 나타냅니다.
SoftPLC의 이름: STATION_READY
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
테스트 볼트 활성화됨 - 91
SoftPLC의 이름: SELECTED_MODE_ID
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
조임이 잠겨 있음 - 27
조임이 비활성화됩니다. 모든 조임을 수행할 수 없습니다.
SoftPLC의 이름: TIGHTENING_IS_LOCKED
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
조임 NOK - 4
최소한 하나의 조임 결과가 지정된 한계 밖에 있음을 나타냅니다.
SoftPLC의 이름: TIGHTENING_NOK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
조임 OK - 3
조임 결과가 지정된 한계 내에 있음을 나타냅니다.
SoftPLC의 이름: TIGHTENING_OK
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
공구 풀기 - 22
공구를 풀고 있음을 나타냅니다.
SoftPLC의 이름: TOOL_LOOSENING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
공구 조임 - 21
공구를 조이고 있음을 나타냅니다.
SoftPLC의 이름: TOOL_TIGHTENING
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
입력/출력 신호
결과 삭제 - 39
다음 조임에 설정된 다른 신호의 상태를 삭제합니다.
SoftPLC의 이름: CLEAR_RESULTS
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
개방형 프로토콜 명령어 비활성화 - 10060
오픈 프로토콜을 통해 가상 스테이션으로 명령을 보내는 기능을 비활성화합니다.
SoftPLC의 이름: DISABLE_OPEN_PRTCOL_CMDS
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 식별자 - 10045
외부 식별자로서 전송된 문자열은 결과에 VIN 번호가 포함됩니다. 작업 선택을 위해 필드버스에서 전달할 최대 2개의 식별자를 제공할 수 있습니다.
SoftPLC의 이름: EXTERNAL_IDENTIFIER
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 문자열 | 8 | 800 |
IdentifierU32Hnw | 상태 | 문자열 | 8 | 800 |
IdentifierU32 | 상태 | 문자열 | 8 | 800 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 1-10035
외부 모니터링 1은 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_1
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 2 - 10036
외부 모니터링 2는 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_2
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 3 - 10037
외부 모니터링 3은 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_3
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 4 - 10038
외부 모니터링 4는 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_4
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 5 - 10039
외부 모니터링 5는 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_5
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 6 - 10040
외부 모니터링 6은 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_6
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 7 - 10041
외부 모니터링 7은 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_7
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
외부 모니터링 8 - 10042
외부 모니터링 8은 컨트롤러의 특정 기능에 연결되지 않은 입력/출력 신호이며 고객의 특정 요구에 따라 사용될 수 있습니다.
SoftPLC의 이름: EXTERNAL_MONITORED_8
변환기 | 신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|---|
표준 | 상태 | 부울 | 1 | 1 |
인버트 | 상태 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
신호 중복을 피하기 위해, 값 변환기를 정의할 수 있습니다.
변환기는 동일한 신호의 둘 이상의 표현을 지원하는 용도로 사용됩니다. (예: 각도/토크 상태는 비트 단위 또는 상태 문자로 표시될 수 있음)
필드버스 활성화 유지 - 30002
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: FALSE
작업자 패널: FALSE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: FALSE
TLS 태그: FALSE
I/O 확장기: FALSE
일반 IO 1-50
오픈 프로토콜에 사용되는 입력/출력 1
SoftPLC의 이름: GENERIC_IO_1
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 10-59
오픈 프로토콜에 사용되는 입력/출력 10
SoftPLC의 이름: GENERIC_IO_10
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 2-51
오픈 프로토콜에 사용되는 입력/출력 2
SoftPLC의 이름: GENERIC_IO_2
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 3-52
오픈 프로토콜에 사용되는 입력/출력 3
SoftPLC의 이름: GENERIC_IO_3
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 4 - 53
오픈 프로토콜에 사용되는 입력/출력 4
SoftPLC의 이름: GENERIC_IO_4
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 5 - 54
오픈 프로토콜에 사용되는 입력/출력 5
SoftPLC의 이름: GENERIC_IO_5
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 6 - 55
오픈 프로토콜에 사용되는 입력/출력 6
SoftPLC의 이름: GENERIC_IO_6
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 7 - 56
오픈 프로토콜에 사용되는 입력/출력 7
SoftPLC의 이름: GENERIC_IO_7
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 8 - 57
오픈 프로토콜에 사용되는 입력/출력 8
SoftPLC의 이름: GENERIC_IO_8
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 IO 9 - 58
오픈 프로토콜에 사용되는 입력/출력 9
SoftPLC의 이름: GENERIC_IO_9
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
상태 | 정수 | 1 | 8 |
장치
필드버스: TRUE
표시등 상자: TRUE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: TRUE
ST 선택기: TRUE
스택라이트: TRUE
TLS 태그: TRUE
I/O 확장기: TRUE
일반 상승 에지 1 - 169
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_1
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 10 - 178
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_10
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 2 - 170
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_2
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 3 - 171
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_3
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 4 - 172
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_4
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 5 - 173
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_5
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 6 - 174
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_6
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 7 - 175
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_7
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 8 - 176
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_8
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
일반 상승 에지 9 - 177
일반 입력/출력 신호
SoftPLC의 이름: GENERIC_RISING_EDGE_9
신호 유형 | 값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|---|
이벤트 | 부울 | 1 | 1 |
장치
필드버스: TRUE
표시등 상자: FALSE
내부 I/O: TRUE
작업자 패널: TRUE
공구 기능: FALSE
ST 선택기: FALSE
스택라이트: TRUE
TLS 태그: FALSE
I/O 확장기: TRUE
하위신호 - 입력
결과 없음 방지
SoftPLC의 이름: CHANNEL_COMMAND_NO_RESULT
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
금지 NOK 결과
SoftPLC의 이름: CHANNEL_COMMAND_NOK_RESULT
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
금지 OK 결과
SoftPLC의 이름: CHANNEL_COMMAND_OK_RESULT
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
강제 pset
SoftPLC의 이름: CHANNEL_COMMAND_FORCE_PSET
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
정수 | 1 | 8 |
강제 볼트 id
SoftPLC의 이름: CHANNEL_COMMAND_FORCE_BOLT_ID
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
정수 | 1 | 8 |
하위신호 - 출력
모든 신호
SoftPLC의 이름: CYCLE_STATUS_ALL
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
정수 | 1 | 32 |
사이클 실행
SoftPLC의 이름: 갑 유형
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
금지됨
SoftPLC의 이름: CYCLE_STATUS_INHIBITED
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
선택된 모드에서
SoftPLC의 이름: CYCLE_STATUS_IN_SELECTED_MODE
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
수리 실행
SoftPLC의 이름: CYCLE_STATUS_REPAIR
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
실행 종료
SoftPLC의 이름: CYCLE_STATUS_TERMINATE
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
조임 실행 중
SoftPLC의 이름: CYCLE_STATUS_RUNNING_TIGHTENING
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
풀기 실행 중
SoftPLC의 이름: CYCLE_STATUS_RUNNING_LOOSENING
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 OK
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_OK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 NOK
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_NOK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 금지됨
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_INHIBITED
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 포함되지 않음
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_NOT_INCLUDED
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클이 다른 사람에 의해 종료됨
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_TERMINATED_BY_OTHER
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 하드웨어 오류
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_HW_ERROR
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
공구 Led 거울 녹색
SoftPLC의 이름: CYCLE_STATUS_TOOL_LED_MIRROR_GREEN
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
공구 Led 거울 황색
SoftPLC의 이름: CYCLE_STATUS_TOOL_LED_MIRROR_YELLOW
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
공구 Led 거울 적색
SoftPLC의 이름: CYCLE_STATUS_TOOL_LED_MIRROR_RED
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 조임 OK
SoftPLC의 이름: CYCLE_STATUS_LAST_TIGHTENING_OK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 조임 NOK
SoftPLC의 이름: CYCLE_STATUS_LAST_TIGHTENING_NOK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 풀기 OK
SoftPLC의 이름: CYCLE_STATUS_LAST_LOOSENING_OK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 풀기 OK
SoftPLC의 이름: CYCLE_STATUS_LAST_LOOSENING_NOK
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 시간 초과
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_TIMEOUT
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 토크 높음
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_TORQUE_HIGH
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 토크 낮음
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_TORQUE_LOW
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 각도 높음
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_ANGLE_HIGH
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
최종 사이클 각도 낮음
SoftPLC의 이름: CYCLE_STATUS_LAST_CYCLE_ANGLE_LOW
값 유형 | 최소 크기 [bit] | 최대 크기 [bit] |
|---|---|---|
부울 | 1 | 1 |
소프트 PLC 신호
매개변수 ID | 이름 | 방향 | 설명 |
|---|---|---|---|
10010 | 조임 시작 (지속) | 입력 | 활성 신호가 조임을 시작합니다. 입력이 비활성화되면 조임을 중지해야 합니다. |
10016 | 입력 비트 0 선택 | 입력 | 선택 비트 0에 대한 입력 신호. |
10017 | 입력 비트 1 선택 | 입력 | 선택 비트 1에 대한 입력 신호. |
10018 | 입력 비트 2 선택 | 입력 | 선택 비트 2에 대한 입력 신호. |
10019 | 입력 비트 3 선택 | 입력 | 선택 비트 3에 대한 입력 신호. |
10020 | 입력 선택 | 입력 | 선택한 값을 입력합니다. |
10024 | 조임 + 시작(펄스) | 입력 | 조임이 신호에 따라 시작합니다. 조임이 끝날 때까지, 또는 조임 프로그램에서 30초 타임아웃이 발생할 때까지 실행합니다. |
10030 | 조임/풀기 정지(펄스) | 입력 | 이 신호가 생성되는 경우, 모든 진행 중인 조임 또는 풀기가 정지합니다. 10024와 비교해서 사용됨. |
10045 | 외부 식별자 | 입력/출력 | 작업 선택을 위해 필드버스에서 전달할 최대 2개의 식별자를 제공하십시오. |
10049 | 필드버스 비활성화 | 입력 | 필드버스를 비활성화합니다. |
10066 | 입력 비트 4 선택 | 입력 | 선택 비트 4에 대한 입력 신호 |
10067 | 입력 비트 5 선택 | 입력 | 선택 비트 5에 대한 입력 신호 |
10068 | 입력 비트 6 선택 | 입력 | 선택 비트 6에 대한 입력 신호 |
10069 | 입력 비트 7 선택 | 입력 | 선택 비트 7에 대한 입력 신호 |
10070 | 입력 비트 8 선택 | 입력 | 선택 비트 8에 대한 입력 신호 |
10071 | 입력 비트 9 선택 | 입력 | 선택 비트 9에 대한 입력 신호 |
10072 | 풀기 시작(펄스) | 입력 | 이 신호가 높아지면 풀기 동기화 모드가 시작됩니다. 풀기 시작(펄스) 신호가 낮더라도, 풀림이 완료될 때까지 실행됩니다. |
10064 | PLC 에서 | 입력 | SoftPLC에서 부속품으로 정보를 전달하는 바이트 배열입니다. |
10054 | 채널 명령어 | 입력 | 채널 명령어를 사용하면 개별 공구가 다음 조임에 포함되지 않도록 제한할 수 있습니다. |
10055 | 작동 활성화 | 입력 | 고정 시스템에서 조임을 실행할 수 있으려면 반드시 높음으로 설정해야합니다 조임 중 낮음으로 설정되며, 조임이 중지되고, 사이클 상태는 NOK입니다. |
10056 | 사이클 상태 재설정 | 입력 | 사이클 상태 재설정이 "참"으로 설정되면, 스테이션의 상태와 모든 볼트의 상태의 재설정이 실행됩니다. 조임 중 신호가 설정되면, 신호는 무시됩니다. |
10057 | 테스트 볼트 사용 안함 | 입력 | 신호는 테스트 볼트가 외부 소스에서 수행될 수 있는지의 여부를 제어합니다. 신호가 참(높음)으로 설정되면, 외부 소스에서 테스트 볼트 수행을 할 수 없습니다. |
10062 | 시스템 오류 재설정 | 입력 | 이 입력이 높음으로 설정되면, 시스템은 모든 하드웨어 오류를 재설정합니다. |
82 | 사이클 시작 준비 | 출력 | 시스템이 조임을 시작할 준비가 되면 신호는 높음으로 설정됩니다. 다음 조건이 충족되면, 시스템이 준비됩니다:
|
78 | 사이클 실행 | 출력 | 시스템이 조임을 실행하는 동안 높음으로 설정하십시오. |
77 | 사이클 완료 | 출력 | 실행 사이클이 완료되고 데이터가 지속적으로 저장될 때 높음으로 설정하십시오. |
75 | 사이클 OK | 출력 | 마지막 조임이 OK이면 시작 신호가 수신되면 해제됩니다. |
76 | 사이클 NOK | 출력 | 마지막 조임이 NOK이면 높음으로 설정하고 시작 신호가 수신되면 해제됩니다. |
83 | 시스템 오류 없음 | 출력 | 시스템에 하드웨어 오류가 없으면 시스템 오류 없음이 "참"으로 설정됩니다. |
91 | 테스트볼트 활성화 | 출력 | 테스트 볼트 활성화는 테스트 조임이 활성화된 경우를 표시하는 용도로 사용됩니다. |
20036 | 비상 정지 | 출력 | 시스템이 비상 정지된 경우 높음으로 설정하십시오. |
42 | IO 켜짐 | 출력 | 컨트롤러 켜짐 |
96 | 필드버스 차단 | 출력 | 필드버스 연결이 끊어지면 필드버스 차단이 "참"으로 설정됩니다. |
102 | 시스템 경고 없음 | 출력 | 공구 중 하나가 "서비스 시간" 도는 "교정 시간"이라고 보고하면 시스템 경고 없음이 높음으로 설정됩니다. |
100 | 식별자 수신 | 출력 | 식별자 수신은 새 식별자가 수신되었음을 알리기 위해 사용됩니다. |
72 | 선택한 모드 ID | 출력 | 선택한 모드 ID는 모드가 유효한 경우 입력 모드 값을 미러링합니다. 모드가 유효하지 않거나 아무 모드도 선택하지 않으면, "0"이 전송됩니다. |
79 | 볼트 조임 상태 | 출력 | 동기화된 조임의 개별 볼트 상태입니다. 100개의 볼트가 지원됩니다. |
80 | 채널 조임 상태 | 출력 | 동기화된 조임의 개별 채널 상태입니다. 64개의 채널이 지원됩니다. |
81 | 채널 하드웨어 상태 | 출력 | 개별 채널에 대한 HW 상태입니다. |
85 | 소프트웨어 배포 버전 | 출력 | 컨트롤러에 실행 중인 소프트웨어 릴리스 버전입니다. |
86 | 소프트웨어 주 버전 | 출력 | 컨트롤러에 실행 중인 소프트웨어의 주 버전입니다. |
87 | 소프트웨어 부 버전 | 출력 | 컨트롤러에 실행 중인 소프트웨어의 부 버전입니다. |
88 | 구성 버전 | 출력 | 현재 컨트롤러에서 사용되는 구성 버전입니다. |
10065 | PLC 로 | 출력 | 부속품에서 SoftPLC로 정보를 전달하는 바이트 배열입니다. |
비주기적 결과 항목
이것은 비주기 데이터로 전송될 수 있는 결과 항목의 목록입니다.
비주기적 결과 항목 |
|---|
배치 크기 |
배치 시퀀스 카운터 |
배치 시퀀스 현재 상태 |
배치 현재 상태 |
배치 카운트 |
배치 시퀀스 이름 |
배치 시퀀스 색인 |
전체 상태 추가 정보 |
모드 이름 |
상태 |
조임 프로그램 이름 |
상태 |
작동 모드 |
상태 정보 |
정지 중 오류 |
볼트 번호 |
최종 토크 |
경과 시간 |
볼트 이름 |
채널 |
실패 단계 |
토크 하한선 |
토크 상한선 |
최종 각도 |
각도 하한선 |
각도 상한선 |
목표 각도 |
목표 토크 |
최종 각도 시작 |
공구 일련 번호 |
공구 일련 번호 |
압축 오류 |
최종 각도 |
토크 차이 |
각도 차이 |
최대 시간 제한 |
날짜 및 시간 |
VIN |
차단 토크 |
측정된 포스트 스레드 컷 각도 |
측정된 포스트 스레드 컷 피크 토크 |
토크 속도 |
토크 속도 편차 |
각도 창의 낮은 토크 |
포스트 보기 평균 토크 높음 |
포스트 보기 토크 높음에서의 각도 |
스틱 슬립 감지 - 측정된 진동 수 |
차단 전류 |
포스트 보기 평균 토크 낮음 |
포스트 보기 토크 낮음에서의 각도 |
산출 각도 |
우세 토크 |
모니터 시간 |
피크 토크 |
각도 |
각도 창의 최대 토크 |
피크 토크 - 하한 |
차단 토크 - 하한 |
피크 토크 - 상한 |
차단 토크 - 상한 |
토크 속도 및 편차 - 토크 속도 하한 |
토크 속도 및 편차 - 토크 속도 상한 |
토크 속도 및 편차 - 편차 제한 |
각도 창의 토크- 상한 |
각도 창의 토크- 하한 |
포스트 보기 토크 높음 - 상한 |
포스트 보기 토크 낮음 - 하한 |
전류 차단 - 하한 |
항복점의 각도 - 상한 |
항복점의 각도 - 하한 |
전류 차단 - 상한 |
시간 - 하한 |
프리베일링 토크 - 상한 |
프리베일링 토크 - 하한 |
시간 - 상한 |
경과 시간 |
크로스 스레드 |
최대 시간 - 상한 |
크로스 스레드 - 최소 한계 |
크로스 스레드 - 최대 한계 |
전체 상태 추가 정보
각 볼트의 여러 레벨과 전체 레벨에는 전체 상태 추가 정보로 불리우는 필드가 있습니다. 이 필드에 가능한 매개변수 값은 아래 표에 나열되어 있습니다.
매개변수 | 주석 |
|---|---|
수리됨 | 조임의 총 상태는 OK 이지만, 조임 중에 발생한 하나 이상의 오류가 수리되었습니다. |
거부 관리에 의해 종료됨 | 볼트 자체의 오류는 없었지만, 다른 볼트의 오류로 인해 종료되도록 명령 받았습니다. |
관리 종료 거부 실패 | 볼트가 종료되도록 명령되었고 종료 경로를 실행하는 동안 오류가 발생하였습니다. |
정지됨 | 외부에서 정지 신호(예를 들면 필드 버스를 통해 전송된 기계 정지 또는 공구 트리거가 해제된 경우)로 인해 조임이 종료되었습니다. |
비상 정지됨 | 비상 정지로 인해 조임이 종료되었습니다. |
공구 오류 | 공구의 하드웨어 오류로 인해 조임이 종료되었습니다. |
드라이브 오류 | 드라이브의 하드웨어 오류로 인해 조임이 종료되었습니다. |
금지됨 | 외부 신호가 차단되었기 때문에 장치를 실행할 수 없습니다. |
InvalidPset | 컨트롤러가 잘못된 조임 프로그램을 로드했습니다. |
PreStartCheckFailed | 컨트롤러의 preStartCheck 상태가 실패했습니다. 공구 오류가 생긴 경우 및 emergencyStop이 활성화되어 있고 시스템이 정지 신호를 받은 경우 등과 같은 여러가지 이유가 원인입니다. |
수리 거부 관리 실패 | 볼트가 수리를 명령 받았으며 수리 경로를 실행하는 중에 오류가 발생했습니다. |
내보내기 및 가져오기에 대한 파일 형식
ToolsTalk 2 애플리케이션의 다양한 위치에서 컨트롤러의 구성 및 결과를 내보내고 가져올 수 있습니다. 또한 내보내기로 인해 다른 파일 내용이 발생할 수 있습니다.
추가 처리를 위해 조임 결과 및 이벤트를 내보냅니다.
Atlas Copco 서비스 엔지니어로부터 디버그 지원을 받기 위해 로그 파일을 내보냅니다.
설정을 다른 컨트롤러로 복사하는 데 사용할 수 있는 컨트롤러 구성을 내보냅니다.
컨트롤러 데이터의 내보내기는 컨트롤러 유형 및 컨트롤러 소프트웨어 버전에 따라 다를 수 있습니다. 파일 형식에 대한 자세한 설명과 파일 내용은 각 컨트롤러와 버전 문서를 참조합니다.
표는 ToolsTalk 2 내보내기의 요약을 제공합니다.
위치 | 경로 | 파일 유형과 형식 | 사용 |
|---|---|---|---|
컨트롤러 라이브러리 구성 |
| *.json | 컨트롤러 구성의 내보내기 및 컨트롤러 템플릿을 만들기. ToolsTalk 2 내부에서 사용됩니다. |
필드버스 구성 |
| *.json | 필드버스 구성 내보내기. 구성을 복사하는 데 사용됩니다. 가져오기 명령과 함께 사용됩니다. ToolsTalk 2 내부에서 사용됩니다. |
컨트롤러 소프트웨어 및 데이터 관리 |
| *.tar.gz | 컨트롤러에서 컨트롤러 결과 및 구성 전체를 내보내기 하는 데 사용됩니다. 공구 로그를 내보낼 수도 있습니다. 이전에 내보낸 파일에서 구성 가져오기 및 매개변수 확인에 사용할 수 있습니다. |
예약된 컨트롤러 내보내기 및 가져오기 |
| *.tar.gz | 컨트롤러에서 컨트롤러 결과 및 구성의 전체 예약 내보내기를 하는 데 사용됩니다. 이전에 내보낸 파일의 구성 및 매개변수의 예약된 가져오기를 하는 데 사용할 수 있습니다. |
컨트롤러 내보내기 및 가져오기 |
| *.tar.gz | 컨트롤러에서 컨트롤러 결과 및 구성의 전체 예약 내보내기를 하는 데 사용됩니다. 이전에 내보낸 파일에서 구성 및 매개변수 가져오기를 예약하는 데 사용할 수 있습니다. 사용자 권한이 글로벌 아이콘에 대한 액세스를 방지하는 경우 대체 경로로 사용됩니다. |
결과 내보내기 |
| *.csv | 컨트롤러에서 조임 결과를 내보내는 데에만 사용함 |
컨트롤러 소프트웨어 |
| *px2it.zip | 새 컨트롤러 소프트웨어를 불러옵니다. |
파일 유형과 형식 | 사용 |
|---|---|
*.json | 파일 형식은 ToolsTalk 2 내에서 사용됩니다. 파일은 구성 복사 및 매개변수 설정을 위하여 사용할 수 있습니다. 파일 형식은ToolsTalk 2 애플리케이션에서 사용될 수 없습니다. |
*.tar.gz | 컨트롤러에서 컨트롤러 결과 및 구성 전체를 내보내기 하는 데 사용됩니다. 파일 형식은 컨트롤러에서 사용할 수 없습니다. 파일에서 포함할 수 있는 모듈:
|
*.csv | 컨트롤러에서 조임 결과 또는 이벤트를 내보내는 데에만 사용합니다. 이 파일은 *.tar.gz 파일에 포함되어 있습니다. csv 파일은 컨트롤러의 언어 설정에 따라 서로 다른 문자를 사용해 필드를 구분합니다. 필드는 컨트롤러 소프트웨어 버전에 따라 다를 수 있습니다. |
*px2it.zip | 컨트롤러 소프트웨어를 로드하는 데만 사용됩니다. 어떤 구성 또는 매개변수 설정도 포함하지 않습니다. |
시나리오 인쇄하기
스테이션에서 인쇄 완료
인쇄할 프로그램이 컨트롤러에 있고 TT2 독립 실행형 버전이 설치된 Atlas Copco PC에 액세스할 때 이 옵션을 사용하십시오. Flex 컨트롤러에 연결하여 스테이션에서 프로그램 인쇄하기:
조임 프로그램을 선택하고 열어서 봅니다.
소프트웨어의 오른쪽 상단에 있는 인쇄 버튼을 사용하여 프로그램을 인쇄합니다. (Windows 10이 설치된 시스템의 경우, TT2에서 프린트 옵션을 사용할 때 기본적으로 “PDF로 마이크로소프트 인쇄”라고 불리우는 옵션을 사용할 수 있습니다. 이전 버전에서는, 이 옵션을 Adobe acrobat을 설치하거나 이전 Windows 시스템에 Foxit PDF 리더를 설치하여 추가할 수 있습니다.
활성 온라인) Flex 컨트롤러가 있는 PF6 FlexSystem으로 인쇄하기
인쇄할 프로그램이 사용자가 더 이상 액세스 할 수 없는 컨트롤러에서 내보내기 한 xxx.tar.gz 파일에 있는 경우 이 옵션을 사용하십시오. 시스템에서 내보낸 tar.gz 파일을 사용하여 프로그램 인쇄하기:
원하는 PF6 Flex 컨트롤러에 연결합니다.
컨트롤러에서 현재 구성(오리지널 구성)을 내보냅니다. 이렇게 하면 기존 시스템을 백업하여 마지막에 복원할 수 있습니다.
인쇄할 조임 프로그램이 포함된 구성 파일을 이 컨트롤러로 가져옵니다.
스테이션에서 수행된 인쇄의 단계에서 설명된 것 처럼, 조임 프로그램을 열고 인쇄합니다.
2단계에서 저장한 오리지널 구성을 가져와서 컨트롤러를 오리지널 상태로 되돌립니다..
비활성(오프라인) PF6 FlexSystem이 있는 PF6 FlexSystem을 사용하여 인쇄하기
이 인쇄는 시스템 앞에 있지 않고서도 파일(xxx.json 파일)을 인쇄할 수 있는 가장 쉬운 방법입니다.
.json 파일은 오프라인 컨트롤러(라이브러리)에서 구성을 내 보낸 결과로 만들어집니다.
.json 파일을 라이브러리로 가져옵니다.
라이브러리의 .json 파일에서 구성을 엽니다.
조임 프로그램을 열고 인쇄합니다.
tar.gz 파일과 .json 파일 간의 변환
구성은 연결된 컨트롤러와 오프라인 컨트롤러 간을 이동할 수 있습니다. 즉, XXX.tar.gz에서 XXX.json으로 또는 그 반대로 이동할 수 있습니다.
전제 조건:
Flex 컨트롤러
TT2 설치
.tar.gz 파일을 .json 파일로 변환하려면 다음을 수행하십시오.
Flex 컨트롤러가 있는 PF5 Flexsystem으로 인쇄하기에서 1-3 단계를 이행하십시오.
왼쪽 열의 컨트롤러 이름과 “라이브러리에 추가”를 마우스 오른쪽 버튼으로 차례대로 클릭하십시오.
라이브러리로 이동하여 라이브러리에 오프라인 컨트롤러로서 추가된 컨트롤러 이름을 찾습니다.
컨트롤러 확인란 “관리 - .json 파일을 내보내기”를 선택하십시오.
.json 파일을 .tar.gz 파일로 변환하려면 다음을 수행하십시오.
비활성(오프라인) Flex 컨트롤러가 있는 PF6 Flexsystem으로 인쇄하기의 1-2 단계를 따르십시오.
컨트롤러 확인란 “관리 - 배포”를 선택하십시오. 그러면 연결된 컨트롤러에 사용자가 배포하기를 원하는 확인란 항목의 목록이 나타납니다. 관련 내용을 확인하고 배포를 선택하십시오.
공장 구조 - 컨트롤러를 열고, xxx.tar.gz 파일을 얻기 위해 내보내기를 실행합니다.
시스템 정보
문제 | 해결책 |
|---|---|
설치 파일 | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client C:\Program Files (x86)\Atlas Copco\ToolsTalk Server C:\Program Files (x86)\Atlas Copco\ToolsTalk Station Setup |
설치 로그 파일 | 각 설치의 폴더에 log.txt라는 로그 파일이 있습니다. |
컴퓨터 IP 주소 | 컨트롤러 구성에 필요한 정보. Windows 시작 메뉴를 선택합니다. 창 하단에 cmd를 입력하고 <리턴>을 누릅니다. 관리자 창이 열립니다. ipconfig를 입력하고 <리턴>을 누릅니다. 컴퓨터의 IP 주소가 표시됩니다. |
컴퓨터 이름 | 클라이언트 설치가 올바른 서버 설치를 가리키기 위해 필요한 정보. Windows 시작 메뉴를 선택합니다. 시스템 정보를 창의 하단 상자에 입력하고 <리턴>을 누릅니다. 시스템 정보 창이 열립니다. 시스템 이름 매개변수는 서버의 위치를 가리키도록 클라이언트 설치에 필요합니다. |
데이터베이스 카탈로그 삭제 | 선택한 SQL 서버의 Management Studio를 시작합니다. 원하는 데이터베이스 카탈로그를 선택합니다. 기본 이름은 ToolsTalkEventStore입니다. 마우스 오른쪽 버튼으로 클릭하고 삭제를 선택합니다. 백업을 삭제하고...... 확인란을 선택합니다. 기존 항목을 닫음 ...... 확인란을 선택합니다. 확인을 선택합니다. |
데이터베이스 인증 점검 및 수정 | 선택한 SQL 서버의 Management Studio를 시작합니다. 원하는 서버를 선택합니다. 마우스 오른쪽 버튼으로 클릭하고 속성을 선택합니다. 보안 페이지를 선택합니다. 서버 인증 필드 내에서 SQL 서버 및 Windows 인증 라디오 버튼에 표시합니다. |
Functionality Management System(FMS) 설치 | 클라이언트-서버 설치에만 적용됩니다. FMS 설치는 InstallShield 마법사의 일부이며 자동으로 실행됩니다. 올바른 설치를 위해 시스템 변수 JAVA_HOME이 올바른 값을 가지고 있어야 합니다. Windows 시작 메뉴를 선택합니다. 창 하단에 있는 상자에 System variables를 입력합니다. 몇 가지 옵션이 표시됩니다. 시스템 환경 변수 편집을 선택합니다. 시스템 속성 팝업 창이 열립니다. 환경 변수 명령 버튼을 선택합니다. 시스템 변수 창에서 아래로 스크롤하여 JAVA_HOME 변수를 검색합니다. 변수가 존재하는 경우, 이 값은 64비트 Java 설치 경로입니다. 변수가 존재하지 않는 경우, 신규 명령 버튼을 선택합니다. 새로운 시스템 변수 팝업 창이 열립니다. 변수 이름은 JAVA_HOME으로 설정해야 합니다. 변수 값은 설치 디렉토리 C:\PROGRAM FILES\JAVA\JRE1.8.0_131로 설정해야 합니다. BIN 폴더를 포함하지 마십시오. |
Functional Management System(FMS)이 올바르게 설치되었는지 확인합니다. | Windows 시작 메뉴를 선택합니다. 창 하단 상자에 Services를 입력합니다. 몇 가지 옵션이 표시됩니다. 서비스를 선택합니다. 시스템 속성 팝업 창이 열립니다. 목록에서 아래로 스크롤하고 FlexNet License Server -acopco를 찾습니다. 상태가 시작됨을 나타내면 FMS가 설치되고 실행 중입니다. |
ToolsTalk 2 서버가 설치되어 실행 중인지 확인합니다. | Windows 시작 메뉴를 선택합니다. 창 하단 상자에 Services를 입력합니다. 몇 가지 옵션이 표시됩니다. 서비스를 선택합니다. 시스템 속성 팝업 창이 열립니다. 목록에서 아래로 스크롤하여 Atlas Copco Industrial Technique Host for ToolsTalk를 검색합니다. 상태가 시작됨을 나타내면 서버가 설치되고 실행 중입니다. |