智能啮合步骤
智能啮合用于促进螺丝啮合,通常以低转速 (100-150 rpm) 运行。智能啮合首先达到啮合扭矩,然后在设定的验证角度期间必须保持在最大扭矩以下和啮合扭矩以上。通过监控验证角度和拧紧步进角度期间的扭矩,该步骤可以立即检测倾斜和缺失的螺丝。
当达到设定的啮合扭矩时,可能会触发啮合。达到啮合扭矩后,控制器将监控设定的验证角度的扭矩,以确保螺丝正确啮合。如果拧紧达到最大扭矩或最大角度,将触发重试操作。重试操作可以由重试或中止组成。用户可以根据不同的错误定义拧紧应如何操作。如果因最大扭矩触发了重试操作,则很可能是由于螺丝倾斜引起的,因此建议的重试操作是重试。
如果因最大角度触发了重试操作,则很可能是由于螺丝缺失引起的,因此建议的重试操作是中止。
速度 | 工具速度可在有效范围内编程。 |
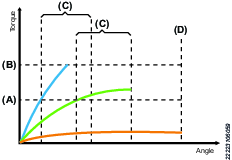
啮合扭矩 (A) | 达到啮合扭矩后激活验证角度。 |
验证角度 (C) | 监控指定角度的扭矩,以确保扭矩高于啮合扭矩,低于最大扭矩。当满足这些要求时,步骤完成。 |
重试操作 |
|
拧松角度方法 |
|
拧松角度 | 用于重试的用户定义角度。 |
拧松扭矩 | 拧松时的最大扭矩。 |
拧松速度 | 触发重试时为拧松设置的速度。 |
方向 | 拧紧方向,顺时针或逆时针。对于普通拧紧,使用顺时针设置。 |
重试信号 | 指定当工具在重试过程中处于松开状态时,应触发哪个外部监控输入信号。 |
真空已启用 | 用于打开外部真空泵的数字输出。 |
快速变速 | 可在快速与慢速之间迅速切换。启用时将可以在更长的时间范围内对当前所控制工具进行更精确的扭矩估计。此设置作用于当前步骤与下一步骤的过渡阶段。 |
最大扭矩 (B) | 如果达到最大扭矩,将触发重试操作。 |
最大角度 (D) | 如果达到最大角度,将触发重试操作。 |
重试限制 | 满足重试操作后,拧紧操作将尝试重新拧紧螺丝的次数。 |
步骤启动延迟 | 从触发到工具启动的延迟。 |
最短步骤时间 | 步骤的最短时间。如果没有达到,控制器将显示错误消息。 |
最长步骤时间 | 步骤的最长时间。如果超过,控制器将显示错误消息。 |









































