Etapa de engranaje inteligente
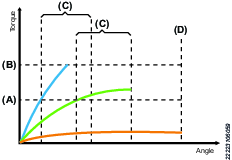
El engranaje inteligente se utiliza para facilitar el engranaje del tornillo, normalmente a rpm bajas (100-150 rpm). El engranaje inteligente alcanza primero un par de engranaje y, a continuación, debe permanecer por debajo del par máximo y por encima del par de engranaje durante un ángulo de validación definido. Al monitorizar el par durante el ángulo de validación y el ángulo de etapa de apriete, la etapa puede detectar instantáneamente tornillos inclinados y no colocados.
Cuando se alcanza el par de engranaje definido, se activa un posible engranaje. Tras alcanzar el par de engranaje, el controlador monitorizará el par para un ángulo de validación definido para garantizar que se engrana correctamente el tornillo. Si el apriete alcanza el par máximo o el ángulo máximo, se activa una acción de reintento. Una acción de reintento puede consistir en un reintento o en una cancelación. El usuario puede definir cómo debe actuar el apriete según los diferentes errores. Si la acción de reintento se activa a causa del par máximo, probablemente está causada por un tornillo inclinado y, por lo tanto, se recomienda un reintento como acción de reintento.
Si la acción de reintento se activa a causa del ángulo máximo, probablemente el error está causado por un tornillo no colocado y, por lo tanto, se recomienda una cancelación como acción de reintento.
Velocidad | La velocidad de la herramienta se programa dentro del rango válido. |
Par de engranaje (A) | Activa el ángulo de validación tras alcanzar el par de engranaje. |
Ángulo de validación (C) | Monitoriza el par para un ángulo especificado para garantizar que el par está por encima del par de engranaje y por debajo del par máximo. La etapa se completa cuando se cumplen estos requisitos. |
Acción de reintento |
|
Método del ángulo de afloje |
|
Ángulo de desapriete | Ángulo definido por el usuario para los reintentos. |
Par de afloje | Par máximo durante el afloje. |
Velocidad de afloje | La velocidad definida para el afloje si se ha activado un reintento. |
Sentido | Dirección de apriete: hacia la derecha o hacia la izquierda. Utilice la configuración en sentido horario para un apriete normal |
Señal de reintento | Define qué entrada con estado monitorizado externamente debe activarse si la herramienta se está aflojando durante un reintento. |
Aspiración habilitada | Salida digital para encender una bomba de vacío externa. |
Cambio de velocidad rápido | Permite cambiar rápidamente entre velocidades bajas y altas. Si se activa, se puede conseguir una estimación del par más precisa de las herramientas controladas en el momento, en un rango de tiempo más amplio. Esto se aplica en la transición de la etapa actual y la etapa siguiente. |
Par máximo (B) | Si se alcanza el par máximo se activará una acción de reintento. |
Ángulo máximo | Si se alcanza el ángulo máximo se activará una acción de reintento. |
Límite de reintentos | Número de veces que el apriete intentará volver a apretar el tornillo una vez se ha cumplido una acción de reintento. |
Retardo del arranque de la etapa | Retardo del gatillo para iniciar la herramienta. |
Tiempo mínimo de la etapa | Tiempo mínimo para la etapa. Si no se alcanza, el controlador mostrará un mensaje de error |
Tiempo máximo de la etapa | Tiempo máximo para la etapa. Si se excede, el controlador mostrará un mensaje de error. |









































