스마트 체결 단계
스마트 체결 단계는 일반적으로 낮은 RPM(100-150 rpm)에서 나사 체결을 촉진하는 용도로 사용됩니다. 스마트 체결 시 먼저 체결 토크에 도달한 후, 토크는 설정된 검증 각도가 적용되는 동안, 최대 토크 미만으로 유지되고 체결 토크에 도달해야 합니다 검증 각도 및 조임 단계 각도가 적용되는 동안 토크를 모니터링함으로써 기울어지거나 빠진 나사를 이 단계에서 즉시 감지할 수 있습니다.
설정된 체결 토크에 도달하면 가능한 체결이 트리거됩니다. 체결 토크에 도달하면 컨트롤러는 토크가 설정되어 있는 검증 각도를 모니터링하여 나사가 올바르게 체결되었는지 확인합니다. 조임이 최대 토크 또는 최대 각도에 도달하면 작업 재시도가 트리거됩니다. 작업 재시도는 재시도 또는 중단으로 구성됩니다. 사용자는 다양한 오류에 따라 조임 방식을 정의할 수 있습니다. 최대 토크로 인해 작업 재시도가 트리거되는 경우, 기울어진 나사가 원인일 가능성이 높으로 작업 재시도를 다시 시도하는 것을 권장합니다.
최대 각도로 인해 작업 재시도가 트리거되는 경우 나사가 누락되어 오류가 트리거되었을 수 있으므로 작업 재시도의 중단을 권장합니다.
속도 | 공구 속도는 유효 범위 내에서 프로그래밍할 수 있습니다. |
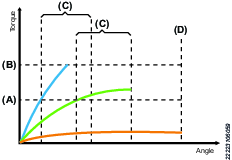
체결 토크 (A) | 체결 토크에 도달한 후 유효성 검사 각도를 활성화합니다. |
유효성 검사 각도 (C) | 지정된 각도에서의 토크를 모니터링하여 토크가 체결 토크보다 높고 최대 토크보다 낮은지 확인합니다. 이러한 요구 사항이 충족되면 단계가 완료됩니다. |
작업 재시도 |
|
풀기 각도 방법 |
|
풀기 각도 | 재시도에 사용되는 사용자 정의 각도 |
풀기 토크 | 풀기 작업 중 최대 토크 |
풀기 속도 | 재시도가 트리거된 경우 풀기에 설정된 속도입니다. |
방향 | 조임으로서 시계 방향 또는 반시계 방향입니다. 일반 조임의 경우 시계 방향 설정을 사용합니다. |
재시도 신호 | 재시도 중 공구가 현재 풀고 있는 경우 어느 외부 모니터링 입력을 활성화할지 정의합니다. |
진공 활성화 | 외부 진공 펌프의 전원을 켜는 디지털 출력입니다. |
빠른 속도 변경 | 빠른 속도와 느린 속도 사이에서 빠르게 전환할 수 있습니다. 이 기능을 활성화하면 보다 장시간에 걸쳐서 현재 제어하는 공구에 대해 보다 정확한 토크 추정치를 구할 수 있습니다. 이는 현재 단계와 다음 단계의 전환에 적용됩니다. |
최대 토크 (B) | 최대 토크에 도달하면 작업 재시도가 트리거됩니다. |
최대 각도 (D) | 최대 각도에 도달하면 작업 재시도가 트리거됩니다. |
재시도 제한 | 작업 재시도가 충족된 후 조임 작업에서 나사를 다시 조이려고 시도하는 횟수입니다. |
단계 시작 지연 | 트리거에서부터 공구 시작까지의 지연. |
최소 단계 시간 | 단계에 대한 최소 시간. 도달하지 않으면 컨트롤러에 오류 메시지가 표시됩니다. |
최대 단계 시간 | 단계에 대한 최대 시간. 초과하면 컨트롤러에 오류 메시지가 표시됩니다. |









































