智能扭矩就位监控 (Smart TSM)
智能扭矩就位监控步骤是扭矩步骤的更智能版本,带有全新的就位检测算法。智能 TSM 会将螺钉拧紧至所需的目标扭矩,还会监控螺钉是否就位。如果否,将报告 NOK,如果螺钉浮动,则报告未检测到就位。控制器需要知道估计的夹紧扭矩和夹紧角度,以计算就位检测。如果拧紧过程中扭矩梯度下降过低,则检测到的就位点可能会被拒绝。然后,它将被视为一个错误的就位点,并将继续搜索另一个就位点。
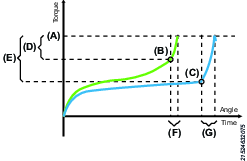
A | 目标扭矩 |
B | 锁紧点 |
C | 锁紧点 |
D | 夹紧扭矩 |
E | 夹紧扭矩 |
F | 夹紧角度 |
G | 夹紧角度 |
速度 | 工具速度在有效范围内编程。 |
目标扭矩 | 连接件的目标扭矩。 |
夹紧扭矩 | 拧紧的预期夹紧扭矩。 |
夹紧角度 | 拧紧的预期夹紧角度。 |
真空已启用 | 用于打开外部真空泵的数字输出。 |
最小扭矩 | 如果步骤完成时未达到最小扭矩,将显示错误消息。 |
最大扭矩 | 如果在步骤完成前达到最大扭矩,工具将停止,而且控制器将显示错误消息。 |
取消扭矩限值 | 此监控参数设置此步骤中的扭矩下限。如果扭矩在任何时候下降到该限值以下,拧紧将会停止并显示错误消息。将此参数设置为 0 将禁用取消扭矩监控。 |
最小角度 | 如果步骤完成时未达到最小角度,将显示错误消息。 |
最大角度 | 如果达到最大角度,工具将停止,而且控制器将显示错误消息。 |
最小夹紧扭矩 | 最小夹紧扭矩可用于检测连接件异常。如果低于,控制器将显示错误消息。 |
最大夹紧扭矩 | 最大夹紧扭矩可用于检测连接件异常。如果超过,工具将停止,而且控制器将显示错误消息。 |
最小夹紧角度 | 最小夹紧角度可用于检测连接件异常。如果低于,控制器将显示错误消息。 |
最大夹紧角度 | 最大夹紧角度可用于检测连接件异常。如果超过,工具将停止,而且控制器将显示错误消息。 |
步骤启动延迟 | 从触发到工具启动的延迟。 |
最短步骤时间 | 步骤的最短时间。如果没有达到,控制器将显示错误消息。 |
最长步骤时间 | 步骤的最长时间。如果超过,控制器将显示错误消息。 |









































