Smart Torque Seating Monitoring (Smart TSM)
La etapa Smart Torque Seating Monitoring es una versión más inteligente de la etapa de apriete, con un algoritmo de detección de asiento completamente nuevo. La Smart TSM apretará el tornillo hasta el par objetivo deseado y también monitorizará si el tornillo ha encontrado asiento o no. Si no lo encontrara, informará un Asiento NOK si no se ha detectado si el tornillo queda flotando. El controlador debe conocer un par de sujeción y ángulo de sujeción estimados para calcular la detección de asiento. Se puede rechazar un punto de asiento detectado si el gradiente de par es demasiado bajo durante el apriete. Se considerará como un punto de asiento falso y seguirá buscando otro punto de asiento.
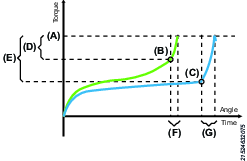
A | Par objetivo |
B | Punto de asentamiento |
C | Punto de asentamiento |
D | Par de sujeción |
E | Par de sujeción |
F | Ángulo de sujeción |
G | Ángulo de sujeción |
Velocidad | La velocidad de la herramienta se programa dentro del rango válido. |
Par objetivo | el par objetivo de la junta. |
Par de sujeción | Par de sujeción esperado para el apriete. |
Ángulo de sujeción | Ángulo de sujeción esperado para el apriete. |
Aspiración habilitada | Salida digital para encender una bomba de vacío externa. |
Par mínimo | Si no se ha alcanzado el par mínimo al finalizar la etapa, aparecerá un mensaje de error. |
Par máximo | Si se alcanza el par máximo antes de que finalice la etapa, la herramienta se detendrá y el controlador mostrará un mensaje de error. |
Límite de par de rescisión | Este parámetro establece un nivel inferior para el par en este paso. Si el par, en algún momento, cae por debajo de este límite, se detendrá el apriete con un mensaje de error. Ajustar este parámetro a 0 desactivará el control del par de rescisión. |
Ángulo mín. | Si no se ha alcanzado ángulo mínimo al finalizar la etapa, aparecerá un mensaje de error. |
Ángulo máx. | Si se alcanza el par máximo antes de que finalice la etapa, la herramienta se detendrá y el controlador mostrará un mensaje de error. |
Par de sujeción mínimo | El par de sujeción mínimo puede utilizarse para detectar anomalías en las juntas. Si es inferior, el controlador mostrará un mensaje de error. |
Par de sujeción máximo | El par de sujeción máximo puede utilizarse para detectar anomalías en las juntas. Si se supera, la herramienta se detendrá y el controlador mostrará un mensaje de error. |
Ángulo de sujeción mínimo | El ángulo de sujeción mínimo puede utilizarse para detectar anomalías en las juntas. Si es inferior, el controlador mostrará un mensaje de error. |
Ángulo de sujeción máximo | El ángulo de sujeción mínimo puede utilizarse para detectar anomalías en las juntas. Si se supera, la herramienta se detendrá y el controlador mostrará un mensaje de error. |
Retardo del arranque de la etapa | Retardo del gatillo para iniciar la herramienta. |
Tiempo mínimo de la etapa | Tiempo mínimo para la etapa. Si no se alcanza, el controlador mostrará un mensaje de error. |
Tiempo máximo de la etapa | Tiempo máximo para la etapa. Si se excede, el controlador mostrará un mensaje de error. |









































