Smart Torque Seating Monitoring (Smart TSM)
The smart torque seating monitoring step is a smarter version of the torque step, with a brand-new seating detection algorithm. The smart TSM will tighten the screw to a desired target torque and will also monitor if the screw has found seating or not. If not, it will report a NOK Seating was not detected if the screw is floating. The controller needs to know an estimated clamp torque and clamp angle to calculate the seating detection. A detected seating point can be rejected if the torque gradient falls too low during the tightening. It will then be regarded as a false seating point and will continue to search for another seating point.
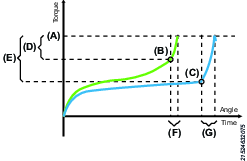
A | Target torque |
B | Seating point |
C | Seating point |
D | Clamp torque |
E | Clamp torque |
F | Clamp angle |
G | Clamp angle |
Speed | The tool speed is programmable within the valid range. |
Target torque | The target torque of the joint. |
Clamp torque | Expected clamp torque for the tightening. |
Clamp angle | Expected clamp angle for the tightening. |
Vacuum enabled | Digital output to switch on an external vacuum pump. |
Min. torque | If the minimum torque has not been reached when the step is finished, an error message will be displayed. |
Max. torque | If the maximum torque is reached before the step is finished, the tool will stop and the controller will display an error message. |
Rescinding torque limit | This monitor parameter sets a lower limit for the torque in this step. If the torque, at any time, drops below this limit, the tightening will stop with an error message. Setting this parameter to 0 will disable the rescinding torque monitoring. |
Min. angle | If the minimum angle has not been reached when the step is finished, an error message will be displayed. |
Max. angle | If the maximum angle is reached before the step is finished, the tool will stop and controller will display an error message. |
Min. clamp torque | The minimum clamp torque can be used to detect joint anomalies. If below, the controller will display an error message. |
Max. clamp torque | The maximum clamp torque can be used to detect joint anomalies. If exceeded, the tool will stop and the controller will display an error message. |
Min. clamp angle | The minimum clamp angle can be used to detect joint anomalies. If below, the controller will display an error message. |
Max. clamp angle | The maximum clamp angle can be used to detect joint anomalies. If exceeded, the tool will stop and the controller will display an error message. |
Step start delay | Delay from trigger to tool start. |
Min. step time | Minimum time for the step. If not reached, the controller will display an error message. |
Max. step time | Maximum time for the step. If exceeded, the controller will display an error message. |









































