스마트 토크 시팅(안착) 모니터링 (스마트 TSM:Torque Seating Monitoring)
스마트 토크 시팅 모니터링 단계는 새로운 시팅 감지 알고리즘이 적용된 더욱 스마트한 버전의 토크 단계입니다. 스마트 TSM은 나사를 원하는 목표 토크로 조이고 나사가 안착되어 있는지 여부도 모니터링합니다. 나사가 안착되어 있지 않고 떠 있는 경우, NOK를 보고합니다. 시팅(안착) 감지를 계산하려면 제어기가 체결 토크 및 각도 추정치를 알아야 합니다. 체결 중에 토크 기울기가 너무 낮아지면 감지된 시팅(안착) 포인트(지점)가 거부될 수 있습니다. 그런 다음 해당 포인트는 잘못된 시팅 포인트로 간주되며 계속해서 다른 시팅 포인트를 검색합니다.
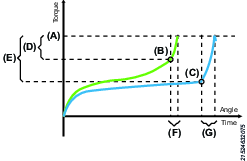
A | 목표 토크 |
B | 시팅 포인트 (안착 지점) |
C | 시팅 포인트 (안착 지점) |
D | 클램프 토크 |
E | 클램프 토크 |
F | 클램프 각도 |
G | 클램프 각도 |
속도 | 공구 속도는 유효 범위 내에서 프로그래밍할 수 있습니다. |
목표 토크 | 조인트의 목표 토크. |
클램프 토크 | 조임의 예상 클램프 토크. |
클램프 각도 | 조임의 예상 클램프 각도 |
Vacuum enabled (진공 활성화) | 외부 진공 펌프의 전원을 켜는 디지털 출력입니다. |
Min. torque (최소 토크) | 단계가 완료될 때 최소 토크에 도달하지 않은 경우 오류 메시지가 표시됩니다. |
Max. torque (최대 토크) | 단계가 완료되기 전에 최대 토크에 도달하면 공구가 멈추고 컨트롤러에 오류 메시지가 표시됩니다. |
잔류 토크 한계 | 이 모니터 매개변수는 이 단계의 토크 하한을 지정합니다. 토크가 어느 순간에든 이 한계 아래로 떨어지면 조임이 오류 메시지와 함께 멈춥니다. 이 매개변수를 0으로 설정하면 취소 토크 모니터링을 비활성화합니다. |
Min. angle (최소 각도) | 단계가 완료될 때 최소 각도에 도달하지 않은 경우 오류 메시지가 표시됩니다. |
Max. angle (최대 각도) | 최대 각도에 도달하면 공구가 멈추고 컨트롤러에 오류 메시지가 표시됩니다. |
Min. clamp torque (최소 클램프 토크) | 최소 클램프 토크는 조인트 이상을 감지하는 데 사용할 수 있습니다. 미만인 경우 컨트롤러에서 오류 메시지를 표시합니다. |
Max. clamp torque (최대 클램프 토크) | 최대 클램프 토크는 조인트 이상을 감지하는 데 사용할 수 있습니다. 최대 클램프 토크를 초과하면 공구가 멈추고 컨트롤러에 오류 메시지가 표시됩니다. |
Min. clamp angle (최소 클램프 각도) | 최소 클램프 각도는 조인트 이상을 감지하는 데 사용할 수 있습니다. 미만인 경우 컨트롤러에서 오류 메시지를 표시합니다. |
Max. clamp angle (최대 클램프 각도) | 최대 클램프 각도는 조인트 이상을 감지하는 데 사용할 수 있습니다. 최대 클램프 토크를 초과하면 공구가 멈추고 컨트롤러에 오류 메시지가 표시됩니다. |
Step start delay (단계 시작 지연) | 트리거에서부터 공구 시작까지의 지연. |
Min. step time (최소 단계 시간) | 단계에 대한 최소 시간. 도달하지 않으면 컨트롤러에 오류 메시지가 표시됩니다. |
Max. step time (최대 단계 시간) | 단계에 대한 최대 시간. 초과하면 컨트롤러에 오류 메시지가 표시됩니다. |









































