Intelligente Momentsitzüberwachung (Smart Torque Seating Monitoring – Smart TSM)
Der Schritt für die intelligente Momentsitzüberwachung ist eine intelligentere Version des Drehmomentschritts mit einem brandneuen Algorithmus zur Sitzerkennung. Die Smart TSM zieht die Schraube bis zu einem gewünschten Solldrehmoment an und überwacht zudem, ob die Schraube den Sitz erreicht hat oder nicht. Falls nicht, wird ein „NIO – Sitz wurde nicht erkannt“ ausgegeben, wenn die Schraube nicht korrekt angezogen wurde. Die Steuerung muss ein geschätztes Einspannmoment und einen Einspannwinkel kennen, um die Sitzerkennung zu berechnen. Ein erkannter Befestigungspunkt kann abgelehnt werden, falls der Drehmomentgradient während der Verschraubung zu stark abfällt. Er wird anschließend als fehlerhafter Befestigungspunkt angesehen und es wird nach einem anderen Befestigungspunkt gesucht.
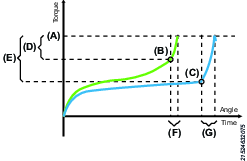
A | Solldrehmoment |
B | Befestigungspunkt |
C | Befestigungspunkt |
D | Einspannmoment |
E | Einspannmoment |
F | Einspannwinkel |
G | Einspannwinkel |
Drehzahl | Die Werkzeugdrehzahl ist innerhalb eines gültigen Rahmens programmierbar. |
Solldrehmoment | Das Zielmoment der Verbindung. |
Einspannmoment | Erwartetes Einspannmoment für die Verschraubung. |
Einspannwinkel | Erwarteter Einspannwinkel für die Verschraubung. |
Vakuum aktiviert | Digitaler Ausgang zum Einschalten einer externen Vakuumpumpe. |
Min. Drehmoment | Wenn das minimale Drehmoment bei Abschluss des Schritts nicht erreicht wurde, wird eine Fehlermeldung angezeigt. |
Max. Drehmoment | Wenn das maximale Drehmoment vor dem Abschluss des Schritts erreicht wird, stoppt das Werkzeug und an der Steuerung wird eine Fehlermeldung angezeigt. |
Grenzwert rückgängiges Drehmoment | Dieser Überwachungsparameter legt für diesen Schritt einen niedrigeren Grenzwert für das Drehmoment fest. Fällt das Drehmoment zu einem beliebigen Zeitpunkt unter diesen Grenzwert, so stoppt die Verschraubung mit einer Fehlermeldung. Wird diese Parameter auf 0 eingestellt, so wird die Überwachung des rückgängigen Drehmoments deaktiviert. |
Winkel-Untergrenze | Wenn die Winkel-Untergrenze bei Abschluss des Schritts nicht erreicht wurde, wird eine Fehlermeldung angezeigt. |
Winkel-Obergrenze | Wenn die Winkel-Obergrenze vor dem Abschluss des Schritts erreicht wird, stoppt das Werkzeug und an der Steuerung wird eine Fehlermeldung angezeigt. |
Einspannmoment Untergrenze | Das minimale Einspannmoment kann zur Erkennung von Verbindungsfehlern verwendet werden. Falls unterschritten, wird eine Störungsmeldung angezeigt. |
Max. Einspannmoment | Das maximale Einspannmoment kann zur Erkennung von Verbindungsfehlern verwendet werden. Wird es überschritten, stoppt das Werkzeug und an der Steuerung wird eine Fehlermeldung angezeigt. |
Min. Einspannwinkel | Der minimale Einspannwinkel kann zur Erkennung von Verbindungsfehlern verwendet werden. Falls unterschritten, wird eine Störungsmeldung angezeigt. |
Max. Einspannwinkel | Der maximale Einspannwinkel kann zur Erkennung von Verbindungsfehlern verwendet werden. Wird es überschritten, stoppt das Werkzeug und an der Steuerung wird eine Fehlermeldung angezeigt. |
Schrittstartverzögerung | Verzögerung zwischen dem Auslösen und dem Werkzeugstart. |
Min. Schrittzeit | Mindestzeit für diesen Schritt. Falls der Mindestwert nicht erreicht wird, wird an der Steuerung eine Fehlermeldung angezeigt. |
Max. Schrittzeit | Maximalzeit für diesen Schritt. Falls die Maximalzeit überschritten wird, wird an der Steuerung eine Fehlermeldung angezeigt. |









































