フィールドバスの概要
フィールドバス通信を使用する一般的な工場管理制御システムがコントローラと通信する場合、次のようになります。
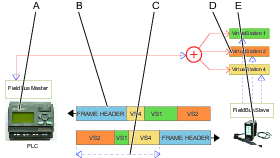
A | フィールドバスマスター (SoftPLC) | B | フレームの見出し |
C | プロセスデータフレーム内の複数の仮想ステーションとのユーザーデータの送受信 | D | 仮想ステーション |
E | 複数の仮想ステーションを持つコントローラ |
フィールドバスマスター(通常は SoftPLC)は、フィールドバスの下位と呼ばれる多数のリモートノードと情報を交換します。マスターは、一度に 1 つの下位と通信します。マスターは下位にフレームを送信し、応答として別のフレームを受信します。
SoftPLC はデータをコントローラに送信しますが、それには識別データ、タスク選択情報、その他の信号などが含まれることがあります。
コントローラは応答を SoftPLC に送信し、これには、イベント信号、スタータス信号、締め付け結果などの信号が含まれることがあります。
物理的な伝送リンクは、選択されたフィールドバスタイプによって異なります。伝送は、アドレス情報を含むフレームの見出しと、すべてのデータを含むプロセスデータフレームで構成されます。
コントローラが仮想ステーションをサポートする場合、正しい情報を各仮想ステーションに指定することが重要です。プロセスデータフレームには、1 つ以上のフィールドバスマップ (各仮想ステーションに 1 つ) を含むことができます。
本セクション内









































