필드버스 개요
필드버스 통신을 사용하는 전형적인 공장 관리 컨트롤러 시스템은 컨트롤러와 통신할 때 아래 그림처럼 표시될 수 있습니다.
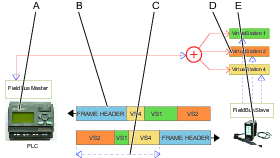
A | 필드버스 마스터 (SoftPLC) | B | 프레임 헤더 |
C | 프로세스 데이터 프레임 내부의 여러 가상 스테이션에서 주고 받는 사용자 데이터 | D | 가상 스테이션 |
E | 여러 가상 스테이션이 있는 컨트롤러 |
일반적으로 SoftPLC인 필드버스 마스터는 필드버스 하위 구성요소라는 여러 원격 노드 정보를 교환합니다. 마스터는 한 번에 한 하위 구성요소와 통신합니다. 마스터는 하위 구성요소에 프레임을 발신하고, 응답으로 다른 프레임을 수신합니다.
SoftPLC는 식별 데이터, 작업 선택 정보 등의 신호를 포함할 수 있는 데이터를 컨트롤러에 전송합니다.
컨트롤러는 이벤트 신호, 상태 신호, 조임 결과, 다른 신호를 포함할 수 있는 SoftPLC에 대한 응답을 보냅니다.
물리적 전송 링크는 선택한 필드버스 유형 따라 달라집니다. 발신은 주소 정보를 포함하는 프레임 헤더 및 모든 데이터가 포함된 프로세스 데이터 프레임으로 구성되어 있습니다.
컨트롤러가 가상 스테이션을 지원하는 경우, 각 가상 스테이션에 올바른 정보를 유도하는 것이 중요합니다. 프로세스 데이터 프레임은 각 가상 스테이션에 대하여 하나씩 필드버스 맵을 포함할 수 있습니다.
이 섹션에서









































