
[イベントの構成]ページからイベントを構成できるかどうかをユーザーに通知します。
Power Focus HC (3.9)
Software
はじめに
このセクションでは、製品に関する基本的な情報と、トピックで使用されている書式設定規則について説明します。
製品基本情報
スマートテンショニングシステムは、3つの主要コンポーネントで構成される、トレーサブルなガイド付きボルトテンショニングソリューションです。スマートテンショナー(STT)には、電子機器とセンサーが統合されており、オペレーターに即座にフィードバックを提供します。ハンドコントローラー(PFHC)はシステムの頭脳であり、統合されたバーコードリーダーによるスキャン、パワーパックの動作、データ収集などのプロセスを制御します。システム全体が閉ループで動作し、すべてのコマンドはハンドコントローラーから提供されます。パワーパックには、当社のヘビーデューティーモーターと高性能電子機器が付属しています。
機能
データ収集
テンション圧力、ナット締付トルク/角度のセンサー
テンショナー上のLEDインジケータ
電子機器を内蔵
テンショナー型式と油圧ポンプタイプの自動認識
デジタルサイクルカウンタ
直感的に使用できるディスプレイ/操作ボタン
利点
プロセスの完全なトレーサビリティ
作業工程時間を短縮
各ステップの即時フィードバック
最低限に抑えられた周辺機器
プロセス精度
規約
ユーザーの皆様にさらにご理解いただけるように、本文書全体で特定のフォーマッティング規約を使用しています。使用される書式規則を以下に示します。
要素 | 表記 | 説明 | 出力 |
|---|---|---|---|
一般的な強調 | プログラム ワークスペース内。 | 特定のテキスト要素を目立たせる、またはハイライト表示します。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) 項目 | 機能ボタンを選択します。 | GUI の画面上にある項目に関する記載 (コマンド ボタン、アイコン名、フィールド名など)。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) パス > | 一般に、GUI の上部にあります。 | GUI 内の場所を追跡するナビゲーション補助。 | 例:コントローラ > プログラム > 編集 |
ユーザー入力 | プログラムの説明を入力します。 | ユーザーが入力する任意のテキスト。 | 太字のテキスト |
ファイル名 | エクスポートするファイル名を入力します。 | システムからエクスポートまたはインポートされたファイル。 | 太字斜体のテキスト |
変数およびパラメーターの名前 | エクスポートの名前を入力します。 | 変数名とパラメーター名 (値ではありません)。 | 斜体のテキスト |
変数およびパラメーターの値 | エクスポートの値を入力します。 | 変数とパラメーターの値。 | 太字大文字のテキスト |
システム出力 | Client.Domain.Models.ExportImportConfiguration | システムによって出力される任意のテキスト。 | 等幅のテキスト |
外部リンク | 文書または対象のコンテンツに関連する情報がある外部サイトへのリンク。これには、次のようなものがあります:
| 外部サイトへの選択可能なテキスト | |
内部ドキュメントへのリンク |
ある場合、これらのリンクはテキストの下に表示されます。 | 内部コンテンツへの選択可能なテキスト |
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
責任と警告
責任
動作環境における多くの事象が締め付けプロセスに影響を与える可能性があり、結果の検証が必要となります。適用規格および/または規制に準拠して、当社は、ここで、締め付け結果に影響を与える可能性のある事象があった場合に、導入したトルクおよび回転方向を確認いただくよう要請します。このような事象の例として、以下のものがありますが、これらに限定されるものではありません。
ツーリングシステムの初めての設置
部品バッチ、ボルト、ネジバッチ、ツール、ソフトウェア、構成または環境の変更
空気接続または電気接続の変更
ライン人間工学、プロセス、品質手順または慣行の変更
オペレーターの変更
締め付けプロセスの結果に影響を与えるその他の変更
以下について確認する必要があります。
影響のある事象によりジョイントの条件が変更されていないこと。
初めての機器の設置、メンテナンスまたは修理後に完了していること。
少なくともシフト毎に一回、または他の適切な頻度に行うこと。
警告
ユーザーガイドについて
このユーザーガイドでは、PFHC のセットアップと構成の方法について説明します。
PFHC システムの操作または保守を行う方を対象としています。
改訂履歴
リリース番号 | 改訂日 | 改訂の説明 |
|---|---|---|
item | item | none |
3.9 | 01/2023 | 新しいコンテンツ: 更新されたコンテンツ: |
3.8 | 09/2022 | Power Focus HC のユーザーガイドの最初の公式リリース版です。 |
関連情報
前提条件
本ユーザーガイドは PFHC の詳細に興味がある方に役立ちます。
本ユーザーガイドに記載の技術的側面を完全に理解するために、次のことを推奨します。
締め付け技術に関する知識
Power Focus の以前のバージョンでの作業経験
システム概要
ソフトウェア構造
メニューの概要
外部コンピュータからアクセスする Web GUI には、次の操作を実行するためのメニューがあります:
テンショニングとハードウェアアクセサリの構成
ツールメンテナンスの実行
ソフトウェアの管理
レポートの表示
ハンドコントローラーのディスプレイに表示されるコントローラー GUI は、システムの操作と監視のためのユーザーインターフェースです。
本セクション内
Web GUI
テンショニング タブ

テンショニングタブは、個々のテンショニングで利用可能なハンド コントローラーに保存されたテンショニングプログラムを一覧表示します。テンショニング構成はテンショニングタブに記載されています。
関連情報
構成タブ

構成のリストは、構成タブにあります。一般的な構成は、接続されているテンショナーと油圧ポンプのタイプに依存しません。
関連情報
テンショナー コントローラー タブ
コントローラータブは、ハードウェアおよびソフトウェアのコンポーネントをリスト表示しています。
ハンド コントローラーに保存され、使用されるソフトウェアのバージョンがリスト表示されており、更新することができます。
また、ハンド コントローラーへの設定のインポートまたはコントローラーからの設定のエクスポートもできます。
レポートタブ
レポートタブでは、テンショニング結果とイベントがリスト表示されます。
関連情報
設定タブ
設定タブでは、日付と時刻、PINコード、イベント、ワイヤレスネットワークなど、ハンドコントローラーの固有の設定を行います。
関連情報
ヘルプタブ
ヘルプタブには、ハンド コントローラーに関する有用なヘルプセクションが含まれています。
関連情報
コントローラー GUI
タスク タブ

タスクタブは、個々のテンショニングで利用可能なハンド コントローラーに保存されたテンショニングプログラムを一覧表示します。テンショニング構成についてはWeb GUIのテンショニングタブに記載されています。
関連情報
レポートタブ

レポートタブにはテンショニングの結果が一覧表示されており、レポートを生成してUSBフラッシュドライブに保存できます。
関連情報
コントローラー情報 タブ

コントローラー情報 タブには、シリアル番号、IP アドレス、ソフトウェア バージョンなどのハンド コントローラー ユニットのデータが一覧表示されます。
関連情報
設定タブ

設定 タブでは、日付と時刻を設定し、結果をクリアできます。
関連情報
接続されているデバイス タブ

接続されているデバイス タブには、ハンドコントローラーに接続されているテンショナーとポンプの接続状態が表示されます。
シリアル番号やソフトウェアバージョンなど、接続されているテンショナーとポンプのユニットデータが一覧表示されます。また、現在のテンショナープーラーバー数も表示されます。
関連情報
操作および取り扱い
Web GUI
GUIボタンとアイコン
ボタン | タイトル | 説明 |
|---|---|---|
 | 追加 | 追加項目を追加します。 |
 | 削除 | アイテムを削除します。 |
| 省略記号 | アイテムを編集します。 |
 | 戻る | 前の表示に戻ります。 |
  | スクロールアップ スクロールダウン | 画面に対して長すぎるリスト内で移動します。 |
  | 最大化 最小化 | パラメータでセクションを最大化または最小化します。 |
  | 戻る(最初に)(リスト内) 戻る(リスト内) | リストの前のページに戻ります。 |
  | 次へ(最後に)(リスト内) 次へ(リスト内) | リストの次のページに進みます。 |
 | 閉じる | ウィンドウを閉じるには、タップします。 |
 | 注意 | パラメータが間違って構成されていることを示すサイン。 |
 | 警告 | 怪我の危険性に関する警告につながるサイン。 |
 | プログラムの検証 | タップして、プログラムが有効かどうかを確認します。 |
 | マニュアルのダウンロード | タップしてマニュアルをダウンロードします。 |
 | ホームに戻る | ホーム画面に移動します。 |
 | 結果を表示 | ライブ結果画面に移動します。 |
コントローラー GUI
GUIボタンとアイコン
ハンドコントローラーのキーパッドのボタンは状況に応じて変化します。有効なボタンは、コントローラー GUI のアイコンで表されます。これらのアイコンは、キーパッド ボタンの現在の機能を示します。たとえば、ホームビューでは、有効なボタンは次のアイコンで表されます。下の図を参照してください。
前へ (左)
次へ (右)
上
下
Enter
ナビゲートするには、キーパッドの上下左右のボタンを使用します。メニューを入力したり、選択を確認したりするには、中央の Enter ボタンを使用します。
コントローラー GUI のすべてのアイコンについては、次の表を参照してください。
詳細については、画像をポイントしてクリックしてください。
1 | 前へ |
2 | 次へ |
3 | 上 |
4 | 下 |
5 | Enter キー (選択) |
6 | Wi-Fi と ToolsNet の接続ステータス |
ボタン | 名称 | 説明 |
|---|---|---|
 | 戻る | 前のビューに戻る |
 | 進む | 続行。 |
 | 上 下 | リスト内を上下に移動します。 |
 | Enter | 選択を確定します。 |
  | もっと見る | 追加情報または操作。 |
 | 次へ | 次のビューに移動します。 |
 | 前へ | 前のビューに移動します。 |
 | Wi-Fi の接続ステータス | Wi-Fi に接続済み |
 | Wi-Fi の接続ステータス | Wi-Fi に接続されていません |
 | ToolsNet の接続ステータス | ToolsNet に接続済み |
 | ToolsNet の接続ステータス | ToolsNet に接続されていません |
LED ステータスインジケータ
テンショナーのLEDマトリックスは、テンショナーのテンショニング作業中にハンドコントローラーのGUI上で模倣されます。LED ステータスインジケータの詳細については、製品説明書 ( STT テンショナー) を参照してください。
クイックスタートガイド
システムの概要をよりわかりやすく説明するために、このセクションでは、 スマートテンショニング システムと Power Focus ソフトウェアの使用を開始するために必要な基本的な手順を説明するクイックガイドを提供します。
このセクションでは、システムのすべての機能について説明するのではなく、最も基本的な機能に焦点を当てています。
システムを始動するには、電源スイッチで油圧ポンプの電源を入れる前に、ポンプとテンショナーをハンドコントローラーに接続する必要があります。
テンショナーをボルトの真上に当てます。クリックレンチを動かして、テンショナー内部のソケットがナットにかみ合っていることを確認します。カチッという音が鳴ったか確認します。レンチでナットに力を加えると、テンショナーが回転することに注意してください。
ハンドコントローラーのタスクアイコンが有効になったら、ハンドコントローラーのキーパッドボタンを使用して手動モードを実行します。
目標圧力を 500 bar などの低圧に設定し、加圧ボタンを押します。
モーターが作動しているのに圧力が上昇しない場合、最も一般的な問題としてモーターが逆回転している可能性があります。システムの電源を切り、電源コネクタの位相を逆にしてから、もう一度やり直してください。
システムが加圧されたら、クリックレンチを動かして角度とトルクの読み取り値が更新されることを確認します。
スマートテンショニングシステムのシステム起動の詳細については、『スマートテンショニングシステム機能ガイド』を参照してください。
インストールとアップグレード
このセクションでは、製品の初期インストールや、バージョンを別のバージョンにアップグレードする際に役立つ情報を見つけることができます。
Web ブラウザの要件
最適なパフォーマンスを得るには、JavaScript のパフォーマンスに優れた Web ブラウザを使用し、ブラウザのキャッシュを有効にします。
次の Web ブラウザを介してソフトウェアを実行することができます:
Google Chrome 70 以降
Microsoft Edge 79 以降
Firefox 63 以降
設定
このセクションでは、製品設定を作成、変更、および確認する方法の詳細について説明します。
PFHC 構成 GUI への接続
最適なパフォーマンスを得るには、JavaScript のパフォーマンスに優れた Web ブラウザを使用し、ブラウザのキャッシュを有効にします。
ハンドコントローラーのUSB接続ポートのカバーを開きます。
ハンドコントローラーのUSB-CコネクタにPCを接続します。PCがハンドコントローラーに十分な電力を供給していることを確実にするには、USB-3.0ポートを使用してください。
構成 GUI に入るには、ブラウザにアドレス、http://169.254.1.1/config.html を入力します。
詳細については、「Web ブラウザの要件」セクションを参照してください。
関連情報
Web GUI
ライブ結果
左下隅に表示されている結果アイコンをクリックして、ライブ結果ビューを開きます。
ステータス、トルク、角度が表示されます。
ライブ結果ビューの右上隅にある接続アイコンをクリックして、プロトコルステータスビューを開きます。
[テンショニング] タブの操作
このセクションでは、マルチステップ テンショニング戦略とテンショニング プログラムの作成方法について説明します。
ホームビューで [テンショニング] タブに移動し、[マルチステッププログラム ライブラリ] を選択します。
マルチステップ構成可能なユーザーインターフェイス
マルチステップ プログラムを構成するためのユーザー インターフェイスは、次の主要な領域で構成されます。
左側のペインの [プロパティ] タブには、プログラム名を含むマルチステップテンショニングプログラムの[一般設定] があります。
左側のペインの [プログラム] タブには、ステップを含むドロップダウンメニューがあります。
マルチステッププログラムを構築するには、[ステップ] をクリックし、リストから適切なステップアイコン (テンショニングまたはテンショニングサービス) をテンショニング領域にドラッグします。選択したステップアイコンをプログラムの最初と最後の間にドロップします。
テンショニング手動プログラムはハンドコントローラーによって自動的に作成され、必要に応じて編集できます。
ユーザーインターフェースの主なエリアはテンショニングエリアで構成されています。ここには、テンショニングプログラムのすべてのステップが含まれます。
デフォルトの手動プログラム
マルチステップ プログラム ライブラリで、「デフォルトの手動プログラム」を選択します。デフォルトの手動プログラムは自動的に作成されます。手動プログラムは、あらゆるサイズとタイプのテンショナーツールで実行できます。
手動プログラムには、手動モードの動作を制御するための3つの設定があります。手動プログラムの名前は、 [一般設定] > [プロパティ] で編集できます。
本セクション内
一般設定
一般設定は「名前」フィールドで構成されています。
プログラムを選択し、[プロパティ] タブに移動し、フリーテキスト文字列フィールドに名前を入力して [一般設定] を編集します。
選択したプログラム名はコントローラー GUI のプログラム一覧に表示されます。これは[タスク] タブのさまざまなジョブ タイプの下にあります。
手動モード パラメータ
デフォルトの手動プログラムで、 テンショニング領域にある [テンショニングマニュアル] アイコンをクリックして、次のパラメータを編集します。
名称
デフォルト手動の油圧 (bar)
最大システム油圧 (bar)
パラメータ | 既定 | 説明 | コメント |
|---|---|---|---|
名称 | 手動モード ステップ | ステップの文字列名 | 手動モードでは結果が生成されないため、使用されません。 |
デフォルト手動の油圧 (bar) | 1000 | システム起動後に初めて手動モードを実行するときに、手動モードの設定圧力範囲を設定するために使用されます。 | デフォルトの手動圧力では、オペレーターが以前の手動モード実行からの以前の圧力を単に再利用しないように確認します。デフォルトの圧力を、用途に適した値に設定します。手動モードを使用すると、システムは、使用される圧力が現在の操作に適した圧力であると想定します。システムの電源がオフになるまで、最後に使用された圧力が手動モードの圧力として使用されます。目標圧力はコントローラー GUI でいつでも変更できます。 |
最大システム油圧 | 1980 | この構成を使用する場合に許容される最高圧力目標。 | システムは、接続されているユニットの中で最も低い最大圧力を使用しています。接続されているユニットのいずれかの最大圧力が低い場合、加圧はこの圧力レベルで停止します。 |
テンショニングプログラム
ホームビューで、[テンショニング]タブを選択します。マルチステッププログラムライブラリが自動的に選択されます。
テンショニングプログラムを追加するには、プログラムリストの上にあるプラスのアイコンをクリックして [プログラム] タブを開き、[ステップ] をクリックします。
テンショニングプログラムが既にある場合は、そのプログラムを選択して編集します。
テンショニングステップをテンショニングエリアにドラッグ・アンド・ドロップします。
ステップは、プログラムの開始点と終了点の間にのみ配置できます。
プログラムの削除とコピーには、[締付けプログラムの削除] ボタンと [締付けプログラムのコピー] ボタンが右下コーナーにあります。
テンショニングシステムは、構成ごとに1つのステップしか使用しません。
セクションにかかわらず締め付けプログラムを変更するには、GUIの右下隅にある[適用]ボタンをクリックして、適用を確定する必要があります。または、同じ場所にある[元に戻す]ボタンをクリックすると、元に戻すことができます。
変更したセクションから(戻る、ホーム、または結果ボタンを使用して)出る場合、変更を適用または元に戻すことができる警告ポップアップが表示されます。ユーザーは変更を適用または元に戻すことなく、先に進めることはできません。
機能 | 説明 | |
|---|---|---|
開始点と終了点 |  | マルチステッププログラムの開始点と終了点。すべてのステップは、この 2 つの点の間に配置する必要があります。 |
ステッププロパティの表示 |  | ステップをクリックするとプロパティが表示されます。 |
ステッププロパティを閉じる | 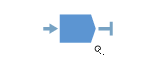 | 締め付けエリア内をクリックすると、プロパティメニューが閉じます。 |
ステップの削除 |  | ステッププロパティから、メニューの下部で [削除] をクリックします。 |
ステップエラー | 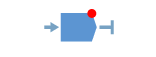 | ステップで検証エラーが発生すると、そのステップがマークされます。ステッププロパティを開くと、エラーを発生させたパラメータもマークされます。赤いマークをクリックすると、エラーの詳細が表示されます。 |
禁止されている配置 |  | ステップの特定の配置が許可されていない場合、プレースホルダーアイコンは表示されません。 |
関連情報
本セクション内
テンショニングパラメータ
Under Program tab, click on the Tensioning item to open it and edit the parameters. 使用されるフォーマッティング規約を以下の表に一覧表示します。 See also Diagram of the tensioning process in the section Tensioning process.
パラメータ | デフォルト値 | ユニット | 説明 | コメント | |
|---|---|---|---|---|---|
a All default values are tailored for an M36 bolt running with min angle 40 degrees and no max angle. b The rotation detection parameters define an expected play in the wrench-socket-gear box chain. The experience is that this can vary a lot depending on, mainly bolt geometry – even when the tool is attached to the same bolt but the socket aligns to different sides of the nut. c The rotation detection parameters define an expected play in the wrench-socket-gear box chain. The experience is that this can vary a lot depending on, mainly bolt geometry – even when the tool is attached to the same bolt but the socket aligns to different sides of the nut. | |||||
名称 |
| User name of the step configuration, written in the xml report file and reported in the step Results. | |||
ボルトサイズ | M36 a | mm | The size of the bolt for the intended configuration. The bolt size is compared to the connected tool and if it does not match, an invalid configuration event is emitted. | The controller GUI filters out the configurations that fit the connected tools. Configurations made for other tool sizes are not displayed in the list under Tasks > Assembly or Tasks > Batch Assembly. | |
Tensioner type | Flange bolt | Tensioner type must match the connected tensioner. The string is compared to the string that identifies the type of tensioner which is programmed in the tensioner during its production. The string is case sensitive when compared to the string in the tensioner. | The controller GUI filters out the configurations that fit the connected tools. Configurations made for other tensioner types are not displayed in the list under Tasks > Assembly or Tasks > Batch Assembly. | ||
Min nut rotation angle | 40 | 角度 | The minimum nut rotation angle for an OK tensioning. | The field can be left empty if the tensioning process does not depend on minimum tightening angle. | |
Max nut rotation angle | 角度 | The maximum nut rotation angle for an OK tensioning. | The field can be left empty if the tensioning process does not depend on the maximum tightening angle. | ||
Angle approval | Approve last angle | Controls the behavior of the angle measurement when re-tensioning after NOK result. Choices are:
| For configurations that require max angle, it is recommended to use only the last angle. For configurations that require min angle, use angle summarization in order to consider the sum of all attempts for OK/NOK results. For configurations that define an angle range, consider which behavior applies for the job the that the configuration is tailored for. | ||
Use clamping force estimation | オン | Controls which clamping force estimation is used for the result. On -> Clamping force estimation is used: tensioning force – Estimated Initial mean settlement Off -> clamping force is calculated according to Load Transfer Factor equation: tensioning force / (1.01 + (bolt diameter / clamping length)) | The Atlas Copco (AC) Load Transfer Factor (LTF) equation utilized in the STS is for use on ‘Flange’ connected joints only. Do NOT use on foundation style joints. | ||
Clamping length | mm | The height of the flange, i.e. the distance between the nuts on each side of the flange. Active when: Use clamping force estimation is ’Off’. | Visible if Use clamping force estimation is ’Off’. | ||
Estimated initial mean settlement | 99 | kN | An estimation of the average force loss when releasing the pressure. Active when: Use clamping force estimation is ’On’. | Visible if Use clamping force estimation is ’On’. It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Estimated initial max settlement | 155 | kN | An estimation of the maximum force loss when releasing the pressure. Active when: Use clamping force estimation is ’On’. | Visible if Use clamping force estimation is ’On’. It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Min required average clamping force | 510 | kN | The minimum average clamping force for all bolts on the flange used in flange summary section in the xml report. Active when: Use clamping force estimation is ’On’. | Visible if Use clamping force estimation is ’On’. It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Batch job report type | 一般 | Controls the flange summary generation in the xml reports:
| Taylored for Vestas xml report requirements: First round, Second round, User General for Service jobs. | ||
Angle sensor reset force | 100 | kN | The force at which the angle measurement reference for 0 degrees is set. | The expected angles are calculated depending on the force increase from the angle sensor reset force to Min bolt tensioning pressure. This evaluates to different pressures depending on the tensioner size, see the table in the section Pressures for Different Tensioner Sizes. The larger the tensioner is, the higher the angle reset force must be set, due to issues with control of low pressures in installation check step. This is necessary in order to avoid overshooting of Installation check hydraulic pressure higher than pressure equivalent of angle sensor reset force. | |
Min bolt tensioning pressure | 1900 | バール | The min pressure for an OK tensioning result. | The pressure control in the system will set a target value higher than the Min bolt tensioning pressure to avoid pressure drop ending in a NOK result. See the picture in the section Hydraulic Pressure Target Window. | |
Max system hydraulic pressure | 1980 | バール | The highest pressure the pressure control in the hand controller allows for this configuration. | The actual max pressure is the lowest of the max pressures in the pump and tensioner and the Max system hydraulic pressure of the configuration. | |
Min bolt tensioning force | 698 | kN | Force equivalent of the Min bolt tensioning pressure parameter. | Value manually calculated from bolt pressure. This value is written in the xml report files, but it is not used by the hand controller's software. | |
設置チェックリスト | 20 | Nm | The required torque for an acknowledged installation check. | ||
Installation check torque duration | 1.0 | S | The required time the Installation check torque must be applied for an acknowledged installation check. | ||
最終ターゲットトルク | 100 | Nm | The required torque for an acknowledged tightening of the nut. | ||
締め付けトルクの結果 | 1.0 | S | The required time the Tightening target torque must be applied for an acknowledged tightening of the nut. | ||
Tightening unexpected clockwise rotation detection angle | 5 | 角度 | The maximum allowed change of the nut rotation angle in clockwise direction when the process is waiting for pressure release. | To avoid the risk of nut rotation while the system waits for pressure release, activate automatic pressure release (see section Tool Configuration). b | |
Tightening unexpected counter clockwise rotation detection angle | 5 | 角度 | The maximum allowed change of the nut rotation angle in counter clockwise direction when the process is waiting for pressure release. | To avoid the risk of nut rotation while the system waits for pressure release, activate automatic pressure release (see section Tool Configuration). c | |
Installation check hydraulic pressure | 20 | バール | The pressure set point for installation check. | The installation check pressure fixes the tensioner to the flange during the installation check. The installation check pressure, including overshoot, must not exceed the pressure equivalent of Angle reset force. | |
Hydraulic pressure set point factor | 1.025 | The actual set point for the pressure regulation is calculated as follows: Min bolt tensioning pressure times Hydraulic pressure set point factor. See the picture in the section Hydraulic Pressure Target Window. | When pressing and holding the pressurization button, the system is pressurized, the pressure will be held inside a pressure window above Min bolt tensioning pressure. | ||
関連情報
テンショニングプロセス
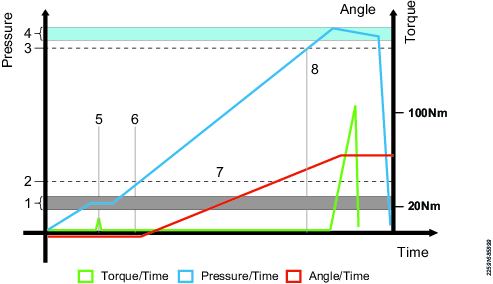
1 | 取り付け確認油圧 |
2 | 角度のリセット力 |
3 | 最小ボルトテンショニング圧 |
4 | 圧力目標範囲。 加圧ボタンを押したままにすると、システムは圧力をこの範囲内に保ちます |
5 | 取り付け確認。メカニズムを既知の位置に設定します。ナットは回転しません。ラチェットとギアボックスのあそびは締め付け方向に固定されています。 |
6 | 角度の基準点がサンプリングされます。締め付け角度の測定はここから始まります。 |
7 | 圧力が上がり、ナットの回転はOKとなりますが、高いトルクをかける必要はありません。油圧装置に仕事を任せます。 |
8 | 最小ボルト圧に達しました。ナットの最終固定。 |
取り付け確認圧力が角度リセット力に対応する圧力よりも高くなって終了した場合、テンショニングプロセスでは角度基準点(6)を設定できません。
したがって、テンショナーのサイズによっては、パラメータの角度リセット力を調整する必要がある場合があります。これは取り付け確認圧力のオーバーシュートに備えてのことです。実際の取り付け確認圧力は、オイルの種類やオイル温度などに応じて変わります。「さまざまなサイズのテンショナーに対する圧力」セクションの表を参照してください。
さまざまなサイズのテンショナーに対する圧力
表 1 に、さまざまなサイズのテンショナーに対する等価圧力を計算した角度リセット力 100kN を示します。
テンショナー | 角度リセット力(kN) | 角度リセット圧 (インチ・バール) |
|---|---|---|
M36 | 100 | 272 |
M42 | 100 | 198 |
M48 | 100 | 151 |
M56 | 100 | 109 |
M64 | 100 | 83 |
M72 | 100 | 64 |
取り付け確認圧を考慮した、さまざまなテンショナーの角度リセット力の設定を表2に示します。
テンショナー | 角度リセット力(kN) | 角度リセット圧 (インチ・バール) |
|---|---|---|
M36 | 100 | 272 |
M42 | 100 | 198 |
M48 | 150 | 226 |
M56 | 200 | 219 |
M64 | 200 | 166 |
M72 | 250 | 161 |
油圧目標範囲
下の図に、加圧ボタンが押されている間、システムが圧力目標範囲内の圧力を維持する仕組みを示します。
テンショニングプロセスのセクションのテンショニングプロセスの図も参照してください。
詳細については、画像をポイントしてクリックしてください。
1 | 最小ボルトテンショニング圧 (y) |
2 | 油圧目標 (x) |
3 | 油圧ヒステリシスレベル (x-y) /3 |
計算
水圧目標 (x) = 最小ボルトテンショニング圧力 (y) × 油圧目標係数 (k)
油圧ヒステリシスレベル = 油圧目標 (x) と最小ボルトテンショニング圧 (y) の間の距離の 1/3。
加圧はこのレベルで開始され、最小レベルより上に維持されます。
関連情報
ボルトのサービスパラメータ
パラメータ | デフォルト値 | ユニット | 説明 | コメント | |
|---|---|---|---|---|---|
a All default values are tailored for an M36 bolt running with min angle 40 degrees and no max angle. b The rotation detection parameters define an expected play in the wrench-socket-gear box chain. The experience is that this can vary a lot depending on, mainly bolt geometry – even when the tool is attached to the same bolt but the socket aligns to different sides of the nut. c The rotation detection parameters define an expected play in the wrench-socket-gear box chain. The experience is that this can vary a lot depending on, mainly bolt geometry – even when the tool is attached to the same bolt but the socket aligns to different sides of the nut. | |||||
|
名称 | User name of the step configuration, written in the xml report file and reported in the step Results. | ||||
ボルトサイズ | M36 a | mm | The size of the bolt for the configuration intended for it. The bolt size is compared to the connected tool and if it does not match, an invalid configuration event is emitted. | The controller GUI filters out the configurations that fit the connected tools. Configurations made for other tool sizes are not displayed in the list under Tasks > Bolt Service or Tasks > Batch Bolt Service. | |
Tensioner type | Flange bolt | Tensioner type must match the connected tensioner. The string is compared to the string that identifies the type of tensioner which is programmed in the tensioner during its production. The string is case sensitive when compared to the string in the tensioner. | The controller GUI filters out the configurations that fit the connected tools. Configurations made for other tensioner types are not displayed in the list under Tasks > Bolt Service or Tasks > Batch Bolt Service. | ||
Max delta nut rotation | 13 | 角度 | The max total allowed rotation of the nut for the bolt service process, i.e. the maximum nut rotation in tightening direction compared to the starting point. | See also section Bolt Service Process. | |
Min delta nut rotation | 0 | 角度 | The minimum actual nut rotation that is allowed for the bolt service process. | Min delta nut rotation and max delta nut rotation create a range of accepted result of the bolt process, e.g. 0.13 - the nut needs to return to its original position (Min delta nut rotation = 0) but must not rotate more than 13 degrees in the tightening direction Max delta nut rotation = 13). A value < 0 for Min delta nut rotation allows that the nut does not return completely to the original position. | |
Use clamping force estimation | オン | Controls which clamping force estimation is used for the result. On -> Clamping force estimation is used: tensioning force – Estimated Initial mean settlement Off -> clamping force is calculated according to Load Transfer Factor equation: tensioning force / (1.01 + (bolt diameter / clamping length)) | The Atlas Copco (AC) Load Transfer Factor (LTF) equation utilized in the STS is for use on ‘Flange’ connected joints only. Do NOT use on foundation style joints. | ||
Clamping length | mm | The height of the flange, i.e. the distance between the nuts on each side of the flange. | |||
Estimated initial mean settlement | 99 | kN | An estimation of the mean force loss when releasing the pressure. Active when: Use clamping force estimation is ’On’. | Visible if Use clamping force estimation is ’On’. It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Estimated initial max settlement | 155 | kN | An estimation of the maximum force loss when releasing the pressure. Active when: Use clamping force estimation is ’On’. | Visible if Use clamping force estimation is ’On’. It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Min required average clamping force | 510 | kN | The minimum average clamping force for all bolts on the flange used in flange summary section in the xml report. | It is used in the xml report generation. The value depends on the tensioner size and the type of the flange. | |
Batch job report type | 一般 | Controls the flange summary generation in the xml reports:
| |||
Nut loosening attempt count torque | 75 | Nm | The torque limit for a loosening attempt. If the number of attempts passes Nut loosening number of attempts, the bolt service process prompts the user to tighten the bolt again because it was not possible to loosen it. | ||
Nut loosening number of attempts | 3 | The number of attempts with torque higher than Nut loosening attempt count torque before prompting the user to tighten the nut again since it was not possible to loosen it. | |||
Nut loosening min loosening angle | 10 | 角度 | The required loosening angle for an acknowledged bolt service operation. | ||
Angle sensor reset force | 100 | kN | The force at which the angle measurement reference for 0 degrees is set. | The expected angles are calculated depending on the force increase from the angle sensor reset force to Min bolt tensioning pressure. This evaluates to different pressures depending on the tensioner size, see the table in the section Pressures for Different Tensioner Sizes. The larger the tensioner is, the higher the angle reset force must be set, due to issues with control of low pressures in installation check step. This is necessary in order to avoid overshooting of Installation check hydraulic pressure higher than pressure equivalent of angle sensor reset force. | |
Min bolt tensioning pressure | 1900 | バール | The min pressure for an OK tensioning result. | The pressure control in the system will set a target higher than the Min bolt tensioning pressure to avoid pressure drop ending in a NOK result. See picture in the chapter Hydraulic Pressure Target Window. | |
Max system hydraulic pressure | 1980 | バール | The highest pressure the pressure control in the hand controller allows for this configuration. | The actual max pressure is the lowest of the max pressures in the pump and tensioner and the Max system hydraulic pressure of the configuration. | |
Min bolt tensioning force | 698 | kN | Force equivalent of the Min bolt tensioning pressure parameter. | Value manually calculated from bolt pressure. This value is written in the xml report files, but it is not used by the hand controller's software. | |
設置チェックリスト | 20 | Nm | The required torque for an acknowledged installation check. | ||
Installation check torque duration | 1.0 | S | The required time the Installation check torque that must be applied for an acknowledged installation check. | ||
最終ターゲットトルク | 100 | Nm | The required torque for an acknowledged tightening of the nut. | ||
締め付けトルクの結果 | 1.0 | S | The required torque for an acknowledged tightening of the nut. | ||
Tightening unexpected clockwise rotation detection angle | 5 | 角度 | The maximum allowed change of the nut rotation angle in clockwise direction when the process is waiting for pressure release. | To avoid the risk of nut rotation while the system waits for pressure release, activate automatic pressure release (see section Tool Configuration). b | |
Tightening unexpected counter clockwise rotation detection angle | 5 | 角度 | The maximum allowed change of the nut rotation angle in counter clockwise direction when the process is waiting for pressure release. | To avoid the risk of nut rotation while the system waits for pressure release, activate automatic pressure release (see section Tool Configuration). c | |
Installation check hydraulic pressure | 20 | バール | The pressure set point for installation check. | The installation check pressure fixes the tensioner to the flange during the installation check. The installation check pressure, including overshoot, must not exceed the pressure equivalent of Angle sensor reset force. | |
Hydraulic pressure set point factor | 1.025 | 1.025 | The actual set point for the pressure regulation is calculated as follows: Min bolt tensioning pressure timesHydraulic pressure set point factor. See the picture in the section Hydraulic Pressure Target Window. | When pressing and holding the pressurization button, the system is pressurized, the pressure will be held inside a pressure window above Min bolt tensioning pressure. | |
本セクション内
ボルトのサービスプロセス
緩め角度と締め付け角度の結果を保証するためには、ボルト サービス プロセスに従ってください。
ツールをボルトに配置します。
圧力取り付け確認油圧まで加圧します。
ボルト サービスの取り付け確認を実行します。
締め付け方向に20 Nmを超えるトルクをかけます。ハンドコントローラーは締め付け方向に角度基準点を取ります。
緩める方向に20 Nmを超えるトルクをかけます。ハンドコントローラーは緩める方向に角度基準点を取ります。
ハンド コントローラーは機械的な遊びの角度を記憶します。
レンチとギアボックスを緩めた状態で、圧力が最小ボルトテンショニング圧のバール数に達するまで加圧ボタンを押し続けます。
ナットを、ボルトサービスパラメータの「ナット緩め最小緩め角度」以上の角度まで緩めます。
コントローラーのUIには、緩め角の基準点からの負の測定値として緩め角度が表示されます。
ボルトを締付け目標トルクパラメータまで締めます。締め付け角度が記録されます。
緩め角度と締め付け角度は、実際のナットの回転を指します。ハンドコントローラーは機械的な遊びを補正します。コントローラーの GUI は、ナットが回転し始めると角度の更新を開始します。つまり、機械的な遊びは無視されます。これにより、表示される角度はナットの動きを反映し、角度測定値が 0 の場合、ナットは元の位置に戻ります。
締め付け方向のデルタナット回転数は、 パラメータの最大デルタナット回転数 (デフォルトは13度) を超えてはなりません。このことは実際、ナットが元の位置よりも 13 度以上高い角度まで回転してはならないことを意味します。
圧力を解放して結果を保存します。OK の結果を得るには、次の条件が満たされている必要があります:
記録された緩め角度は、ナット緩め最小緩め角度以上となります。
締め付け後に記録されたデルタ角度は、最小デルタ ナット回転数 と 最大デルタ ナット回転数の範囲内にある必要があります。
最小デルタ ナット回転数は、図のボルト サービス プロセスの D と等しくなります。
詳細については、画像をポイントしてクリックしてください。
1 | 締め付け位置までのレンチ移動 |
2 | ナットの回転はここから始まります |
3 | 元位置まで締め付けます |
A | 緩め角度 |
B | 固定点の緩め |
C | Riproduci |
D | 固定点の締め付け |
E | 緩めた後に許容される締め付け範囲は、デルタ ナット回転パラメータの最小値と最大値の間となります |
F | 最大ナット回転数 |
[構成]タブの操作
ツールの構成は構成メニューで行います。
本セクション内
ツール構成
ホームビューで、[構成] > [ツール構成] タブに移動し、ツールで使用できる機能を設定します。
名前フィールドに名を入力します。
[編集] ボタンをクリックして構成を編集します。下の表を参照してください。
異なる設定で追加の構成を作成するには、ページの上部にある「プラス」 アイコンをクリックします。
たとえば、自動圧力リリース=オンに設定したり、 ポンプモーターのタイムアウト時間を異なる時間に設定にしたりできます。使用する構成を選択するには、「ホーム」ビューの [テンショナーコントローラー] > [ Tool] に移動します。
パラメータ | デフォルト値 | 単位 | 説明 | コメント |
|---|---|---|---|---|
ポンプモーターのタイムアウト | 30 | 秒 | ポンプモーターの冷却用タイマー。作動油リターンバルブの制御も行います。タイマーが切れて油圧リターンバルブが閉じると、ポンプモーターは停止します。 圧力が解放されると、作動油リターンバルブが開き、モーターが6秒間作動します。その後、ポンプ モーターのタイムアウトが始まり、タイムアウトになると、バルブが閉じてモーターが停止します。 | システムが暖かい状態で使用されている場合、モーターが停止すると作動油が過熱することがあります。 大型テンショナーの場合、作動油をポンプオイルコンテナに戻すには、最低6秒以上かかる場合があります。 |
自動圧力リリース | オフ | 自動圧力リリースがONの場合、設定に従ってナットを締めると自動的に圧力が解放され、テンショニングが完了します。 | 必要なトルクと時間をかけ、トルクを緩めると圧力が解放されます。テンショニングプロセスのセクションの、テンショニングプロセスの図を参照してください。 このパラメータの推奨設定は ON です。その理由は:
|
関連情報
テンショナー [コントローラー]タブの使用
仮想ステーション
仮想ステーションは、ハンド コントローラーをソフトウェアで抽象化したものです。ハンドコントローラーには、1 つの仮想ステーションが接続されたコントローラーが統合されています。仮想ステーションには必要に応じてさまざまな構成を割り当てることができます。
ツール
ツール情報にはテンショナーからのデータが表示されます。
モデル:ソケットサイズとテンショナータイプ。互換性のある構成では、接続されているテンショナーと互換性を持たせるには、[ボルトサイズ] と [テンショナータイプ] のフィールドが [モデル] の文字列と同じ (大文字と小文字が区別されます) である必要があります。構成が HCGUI -> [タスク] -> [アセンブリボルトサービス] のもとに表示されない場合、原因は次の 2 つのプロパティで特定できる可能性があります。
ギア比:テンショナー内のギアボックスの比率。
シリアル番号:テンショナーのシリアル番号。
最大トルク:トルクセンサーに損傷を与えない最大トルク。
ソフトウェアバージョン。
製品番号:テンショナーの品番。
インテリジェントアプリケーションモジュール
インテリジェントアプリケーションモジュール (IAM) は、ハンドコントローラー内にある不揮発性記憶装置です。ストレージモジュールには、すべてのツールのプログラム、構成、結果が含まれます。
ハンド コントローラーに名前を付けます
ホームメニューの テンショナーコントローラータブに移動し、IAMを選択します。
文字列フィールド 名称 をハンドコントローラーに適用します。
名称は Web GUI とハンドコントローラー GUI で使用されます。
ソフトウェアバージョン
ツールには 2 つのソフトウェア バージョンを同時にインストールできます。ソフトウェアの 2 つ目のバージョンをインストールしておくと、複数のハンドコントローラーをアップグレードして同期アクティベーションを行う際の準備として役立ちます。
ソフトウェアのバージョンを変更しても、ツール構成や締めテンショニングプログラムは転送されません。
本セクション内
ソフトウェアの有効化
ハンド コントローラーには、インストール済みソフトウェアバージョンを 2 つ保存することができます。ソフトウェアの有効化を使用すると、どのソフトウェアのバージョンを使用するか選択できます。
ソフトウェアバージョンのアクティベーション
ホームメニューの [テンショナーコントローラー] に移動し、左ペインで [ソフトウェア] を選択します。
[ソフトウェアのアクティベーション]範囲で[現在]または[保存済み]を選択します。
ハンド コントローラーは自動的に再起動され、アクティベーションが有効になります。
ソフトウェアバージョンの更新
インストールするソフトウェアパッケージがハンドコントローラーのハードウェアと互換性がない場合、ソフトウェアの更新はキャンセルされます。ハードウェアのどの部分がキャンセルの原因になったかを示す警告メッセージが表示されます。
現在のツール ハードウェアに関する情報については、[テンショナー コントローラー] > [ハードウェア]をご覧ください。
[テンショナーコントローラー]メニューに移動し、左ペインで [ソフトウェア] を選択します。
[ソフトウェア更新] フィールドに移動し、[参照] を選択します。
該当するソフトウェアで zip ファイルを参照、選択して、指示に従ってインストールを終了してください。
ハードウェア
ハードウェアタブには、モデル名やシリアル番号などのコントローラー情報が含まれています。
ハンドコントローラーのウォームリスタートは、「コントローラーの再起動」ウィンドウで実行できます。[再起動] ボタンをクリックします。
エクスポートとインポートの構成
エクスポートおよびインポートの機能を用いると、外部プログラムでの分析のため、イベントとテンショニング結果をエクスポートしたり、テンショニングプログラムおよびツール構成をツール間で転送したりすることができます。
エクスポート機能は、次の操作のために使用します。
さらに処理するためにテンショニング結果やイベントをエクスポートします。
アトラスコプコのサービスエンジニアからのデバッグ支援のために、ログファイルをエクスポートします。
別のツールに設定をコピーするために使用できるツール構成をエクスポートします。
構成のエクスポート
ホームメニューのテンショナーコントローラーに移動します。左側のペインで [エクスポート/インポート] を選択します。
ツールからエクスポートする内容を選択します:
すべての情報
設定と構成
システムログと情報
結果

パラメータをエクスポートして他のコントローラーにインポートする場合は、[設定と構成]を選択します。
設定と構成を選択すると、結果またはイベントを伴うファイルはアーカイブにエクスポートされません。この設定を使用すると、エクスポートにかかる時間が短縮されます。
[エクスポート] を選択します。エクスポートしたファイルをどこで保存するか、またはどこから取得するかを選択するプロンプトが表示されます。
構成のインポート
ホームメニューの [テンショナーコントローラー] に移動します。左側のペインで [エクスポート/インポート] を選択します。
[インポート] を選択します。インポート機能を使うと、テンショニングプログラムと構成の設定はすべてインポートファイルからの設定に置き換えられます。ただし、ネットワークの設定、PIN、結果およびイベントはインポートされません。
ダイアログボックスで [続行] を選択してインポートを開始します。
エクスポートされた情報とファイル形式
エクスポートされたファイルは、次のファイルを含む圧縮ファイルアーカイブです。
すべての情報
PFExport_<datetime>_Results.csv
PFExport_<datetime>_Events.csv
ExportInfo.txt
settings/settings.zip
atlas_tool_i.zip
atlas_sys_i.zip
atlas_subsystems_info.zip
atlas_plc.zip
jsonConfigurations.zip
設定と構成
ExportInfo.txt
settings/settings.zip
jsonConfigurations.zip
ファイル | 説明 |
|---|---|
PFExport__<ツール名>_<タイムスタンプ>_Events.csv | 次の情報を含むセミコロンで区切られたファイル:
|
PFExport__<ツール名>_<タイムスタンプ>_Results.csv | 次の情報を含むセミコロンで区切られたファイル:
|
ExportInfo.txt | ツールセットアップとツールソフトウェアに関する情報。 |
settings/settings.zip | 以下に示すような締め付けプログラム、バッチ設定、アクセサリ設定、ツール設定をすべて含むバイナリファイル:言語、トルクの単位、日時、および結果の表示 |
atlas_tool_i.zip | ツールログ (デバッグ用) |
atlas_sys_i.zip | ITアプリケーションからのログファイル |
atlas_subsystems_info.zip | サブシステム ソフトウェアに関する情報 |
atlas_plc.zip | PLC 構成 |
jsonConfigurations.zip | マルチステップの締め付けおよび緩めプログラム。 |
「システムログと情報」のエクスポート
サービス技術者はトラブルシューティングを容易にするためにこのエクスポートを行うことで、システムログとその情報をアトラスコプコのサービス技術者と共有することができます。
システムログと情報のエクスポートには、接続されているツールからのログは含まれません。
システムログと情報のエクスポートに含まれるすべてのデータは、 PFExport_<IAM name>_<datetime>.tar.gz ファイルに保存されます。これには次のファイルとディレクトリが含まれます:
atlas_sys_d.zip - IT アプリケーションからのログファイル
atlas_protocol_log.zip – 外部プロトコルアダプタからのログファイル
「exportInfo.txt」 - IAMとコントローラーに関する情報を含むテキストドキュメント
licenseInformation.zip – ライセンス情報とシステム機能
atlas_systeminformation.zip — 現在のシステムの正常性とセットアップに関するアトラスコプコ研究開発部へ送る情報
「システムログと情報」のエクスポート方法
ホームメニューの [テンショナーコントローラー] に移動し、左ペインで [エクスポート/インポート] を選択します。
[エクスポート] ウィンドウで、ドロップダウンメニューを開き、[システムログと情報] を選択します。
[エクスポート]ウィンドウで、[エクスポート]を選択します。
エクスポートプロセスの最後に、エクスポートポップアップウィンドウにより、エクスポートが完了したことを確認します。
PFExport_<IAM 名>_<日時>.tar.gz ファイルが自動的にダウンロードされます。
[レポート]タブの操作
結果の表示
本セクションでは、ハンド コントローラーでテンショニング結果にアクセスする方法と、さまざまな結果表示で示される情報を読み取る方法について説明します。
テンショニングが行われると、結果はハンド コントローラーに保存されます。結果はまた、ToolsNet などの外部システムに送るか、エクスポート機能を使って分析のためにエクスポートすることができます。ToolsNet を使用した統計分析、結果フィルタリング、および締め付け分析の詳細については、『 ToolsNet ユーザーガイド』を参照してください。
保存された結果
各タスクは 1 つの結果として表示されます。単一のテンショニングには、主要なパラメータを示す表に結果が表示されます。
本セクション内
保存された結果ビュー
ハンド コントローラーは、実施したすべての締め付けと緩めの結果を保存します。
保存された結果を表示する
ホームメニューの[レポート]に移動し、左側のペインで[結果]を選択します。
[すべての結果を表示]を選択します。結果リストは次についての情報を表示します:
日付:テンショニングの行われた日時。
締め付けプログラム:締め付けプログラムの列には、マルチステップテンショニングプログラム名が表示されます。
力:テンショニング力をかけるときに測定された力。
圧力:テンショニング力をかけている間に測定された圧力。
結果:トルク/角度の結果
制限:トルク範囲、角度範囲、圧力範囲でOKの結果。NG の結果では、範囲制限を超えた値が赤色のテキストで強調表示されます。
赤いバーのマークの付いた結果のステータスはNGです。
イベントの表示
イベントを使って、ユーザーに対して、システム内の特定の状態の変化または発生を通知します。これらは情報、警告、エラーの3つのタイプに分けられ、それぞれに必要なアクションの種類は異なります。
各イベントには、確認(ACK)、記録(Log)または表示(Disp)するかどうかのデフォルト設定があります。これらの設定は、[イベント] の [設定] メニューで設定できます。
保存されたイベントを表示する
ホームメニューの[レポート]に移動し、左側のペインで[イベント]を選択します。
[すべての結果を表示]を選択します。
リスト内のイベントを選択して、イベントダイアログボックスを開きます。
本セクション内
イベントダイアログボックス
イベントダイアログボックスには、発生したイベントについて、何が起こったのか、どこでいつ発生したのかを説明する情報が含まれています。

位置 | 説明 |
|---|---|
1 | 見出し - システムのどの部分でイベントが関係するかを記述します。 |
2 | イベント名 - イベントの簡単な説明文章。 |
3 | コード - イベントを識別する一意の 4 桁の数字。 |
4 | モジュール - システムのどの部分でイベントが関係するかを記述します。 |
5 | タイプ - 情報、警告、またはエラー。 |
6 | 時間 - イベントが発生した日時。 |
イベントコード
様々なタイプのイベントを使って、ユーザーに対して、システム内の特定の状態の変化または発生を通知します。イベントごとに異なるアクションが必要です。
説明されている手順の一部は、アトラスコプコのサービス担当者のみが実行できます。
特定のイベントコードの詳細については、以下のフィルターを使用するか、検索ボックスにイベントコードの検索条件を入力してください。
ログ/表示/Ack/Conf | |||||||
|---|---|---|---|---|---|---|---|
none | item | none | none | none | column | list | list |
1000 | 情報 | コントローラーが起動しました | コントローラーが起動します。 | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラーとツール | ||
1001 | 警告 | コントローラーのシリアル番号が更新されました | IT ボードボックスのシリアル番号(コントローラーのシリアル番号)が AUX ボードボックスのシリアル番号と異なる場合、起動時に生成されます。AUX ボードは、フィールド内で非交換可能とみなされます。シリアル番号が更新されると、コントローラーは再起動します。 | IT ボードやボックスを交換してください。 | ログ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラーとツール |
1010 | 情報 | Tool Connected | ツールが接続されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラーとツール | |
1011 | 情報 | ツールが切断されました | ツールが切断されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラーとツール | |
1012 | 情報 | ツールがコントローラー接続を拒否しました | このイベントは、ツールがスキップゾーンに入っている場合に発生する可能性があります。 | 別のコントローラーがツールに接続されているかどうかを確認してください。 ツール設定が正しく設定されていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラーとツール |
2000 | 警告 | バッテリー低 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2001 | 警告 | バッテリーが空です | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2002 | 警告 | ツールバッテリー正常性低 | ツールのバッテリー正常性の問題が検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2004 | 警告 | ツールが希望するタイプではありません | ツールが、ツール最大トルクが異なるツールに交換されました。 | ツールの変更。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2006 | 警告 | ツールバックアップバッテリー正常性低 | ツールのバックアップバッテリーのパフォーマンスが低すぎます。 | バックアップバッテリーを交換してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2007 | 警告 | ツールバックアップバッテリーなし | ツールバックアップバッテリーがありません。 | バッテリーの挿入 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2008 | 警告 | ツールバックアップバッテリーエラー | ツールのバックアップバッテリーエラーが検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2009 | 警告 | バックアップバッテリー電圧低 | コントローラーのバックアップバッテリーがほとんど空です | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2010 | エラー | ツールソフトウェアバージョンが一致していません | ツールおよびコントローラーソフトウェアのバージョンに互換性がありません。 | サービスツール - ツールソフトウェアの更新。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2012 | 警告 | ツール通信障害 | ツールとコントローラー間の通信が中断されました。 | アンテナの配置を変えてください。 | Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | ツール |
2013 | 警告 | 不正なリング位置 | ツール方向スイッチの位置に障害があります。 | 頻繁に発生する場合は、ツールの整備を行ってください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2014 | 警告 | ツールがオーバーヒート | ツールがオーバーヒートしました。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2015 | エラー | ツール温度センサーエラー | SRB、TBP、およびIxBツールのみ。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2016 | 警告 | ツールパルスユニット過熱 | パルスユニット過熱ツールはロックされていませんが、パルスユニットの温度がしきい値を超えている間は、ツールが開始されるたびに警告が表示されます。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2019 | 警告 | ツールがモーターを起動できませんでした | ツールモーターの障害。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2020 | 警告 | ツールのモーター調節が必要 | ツールのモーター調節が必要です。 | モーター調整を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2021 | 警告 | モーター調整に失敗しました | モーター調整に失敗しました。 | モーター調整を完了するか、ツールの保守を行います。 | ログ | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2022 | 情報 | モーター調整完了 | モーター調節が完了しました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2023 | 警告 | ツールにオープンエンドの調整が必要 | ツールにオープンエンドの調整が必要です。 | オープンエンドの調整を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2024 | 警告 | オープンエンドの調整に失敗しました | オープンエンドの調整に失敗しました。 | オープンエンドの調整を複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2025 | 情報 | オープンエンドの調整に成功しました | オープンエンドの調整に成功しました。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2026 | 警告 | オープンエンドの位置で失敗しました | オープンエンドの位置決めで失敗しました。 | もう一度ツールトリガーを押し、位置決めが完了するのを待ちます。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2027 | 警告 | ツールの温度が高いため使用が制限されています | 温度制限値に達しました。過熱によるツールのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2030 | エラー | ツールメモリ障害:ツールの変更 | ツールメモリが破損しています。 | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2031 | エラー | ツールアクセサリメモリが破損しています | ツールアクセサリメモリが破損しています。 | ツールアクセサリの整備を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2040 | エラー | システムチェック失敗 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | ||
2041 | エラー | トルクトランスデューサーエラー | 校正エラー時またはツールが変換器エラーをレポートした場合に生成されます。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2042 | エラー | 角度トランスデューサーエラー | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2043 | エラー | ツール接地故障エラー | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2044 | 情報 | ツールサービス間隔が過ぎています | ツールの保守が必要であることを示します。設定した締め付けの回数を超えたときにトリガーされます。 | ツールの整備を実施します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2045 | 警告 | ツール校正データが無効です | 校正データの検証に失敗した場合。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2046 | 情報 | ツール:次の校正日が過ぎています | ツールの較正が必要であることを示します。校正アラームが設定で有効にされており、現在時刻が次の校正日を過ぎている際にトリガーされます。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2048 | 情報 | QA デバイスでツール校正値が更新されました | ツールの校正は、QAデバイスによる校正が実行されたときに更新されています | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2050 | エラー | ツールパラメータファイルはサポートされていません | 必要なツールパラメータがありません。 | ツールパラメータを更新します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2060 | 情報 | 予期しないトリガー動作 | アクセサリが接続されている場合にツールの起動を行わないために使用されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2071 | エラー | ツールメモリが破損しています | ツールの記述子が破損しています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2072 | 情報 | 不明なデバイスが接続されています | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | ||
2073 | 警告 | ツールトリガーの監督失敗 | HW チャンネル障害です。ツールトリガーのハードウェアとソフトウェアが一致しません。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2074 | 警告 | ツールインジケーターボード故障 | ツールインジケーターボード故障です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2075 | 警告 | ツールファン電圧障害 | ツールファン電圧障害です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2076 | 警告 | ツールアクセサリバス電圧障害 | ツールアクセサリバス電圧障害です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2077 | 警告 | ツールトリガーセンサエラー | ツールトリガーセンサエラーです。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2078 | 情報 | ツール締め付けプログラムが更新されました | 締め付けプログラム更新のために、ツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2079 | エラー | ツールケーブルがサポートされていません | ツールケーブルが破損しています。ケーブル内のチップは応答していないか、破損しています。 | ケーブルを交換してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2080 | エラー | ツールバッテリー障害 | DC 電圧が高すぎるか、低すぎます。バッテリー障害。 | アトラスコプコのサービス担当者に連絡し、アトラスコプコにバッテリーを送り返します(再利用しないでください!)。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2081 | エラー | ツール電流制限に達しました | 電流制限値に達したため、ドライブが無効になっています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2082 | エラー | ツール電流測定エラー | 電流測定エラー電流の測定結果が信頼できません。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2083 | エラー | ツール内部エラー | さまざまな内部ハードウェアエラー。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2084 | エラー | ツール内部ソフトウェアエラー | さまざまな内部ソフトウェアエラー | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2085 | エラー | ツール RBU エラー | RBU エラーがツールソフトウェアによって検出されました。 | RBU が正しくインストールされているか確認してください。それでもエラーが発生する場合、ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2086 | エラー | ツール停止 | ツールモーターが停止しています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2087 | 警告 | ツールモーター電流高 | ツールのモータの電流限度を超えており、ツールがロックされています。ツールはフェールセーフモードに入ります。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2088 | 警告 | ツールバッテリー電流高 | ツールバッテリー電流が高過ぎます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2089 | 警告 | ツールドライブ電圧低 | ツールのドライブ電圧が監視されている電圧下限値を下回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2090 | 警告 | ツールドライブ電圧高 | ツールのドライブ電圧が監視されている電圧上限値を上回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2091 | 警告 | ツールメインボードエラー | ツールメインボード内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2092 | 警告 | ツールパワーモジュールエラー | ツールパワーモジュール内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2093 | 警告 | パルスユニットオイルレベル低 | 接続されたパルスツールのオイルレベルが低いです。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2094 | 警告 | パルスユニットオイルレベル空 | 接続されたパルスツールのオイルレベルが必要な動作レベル以下です。 | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2095 | 警告 | ツールバッテリーの通信が失われました | ツールがバッテリーとの通信を失いました。 | バッテリーが正しく挿入されていることを確認します。または、バッテリーを交換します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2096 | エラー | ツールバッテリーのソフトウェアバージョンが一致しません | ツールバッテリーソフトウェアは、ツールソフトウェアと互換性がありません。 | ソフトウェアを更新してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2100 | 情報 | STwrench smartHEAD が削除されました | STwrench smartHEAD が削除されました。 | smartHEADを再接続し、レンチを再起動します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2101 | 警告 | ロック時のレンチ締め | ツールのステータスがコントローラーによってロックされているときに、レンチによる締め付けが実行されました。 | コントローラーのツールステータスがロック解除されるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 | ツール |
2120 | 警告 | 開始できません: ツールにアクティブなトルクトランスデューサーがありません | ログ ディスプレイ | Flex | ツール | ||
2121 | 警告 | 接続されたツールではトランスデューサーが無効になっています | ログ ディスプレイ | Flex | ツール | ||
2122 | 警告 | 開始できません: ツールに必要なトルクトランスデューサーがありません | ログ ディスプレイ | Flex IxB | ツール | ||
2123 | 警告 | 開始できません: ツールに必要な角度トランスデューサーがありません | ログ ディスプレイ | Flex | ツール | ||
2124 | エラー | メイントランスデューサーのトルクトランスデューサーエラー | デュアルトランスデューサーを備えたツールのメイントルクトランスデューサーに、エラーがあることを示します。 | ログ ディスプレイ | Flex | ツール | |
2125 | エラー | 二次トランスデューサーのトルクトランスデューサーエラー | デュアルトランスデューサーを備えたツールの二次トルクトランスデューサーに、エラーがあることを示します。 | ログ ディスプレイ | Flex | ツール | |
2126 | エラー | メイントランスデューサーでのツールトルクトランスデューサー校正エラー | ログ ディスプレイ | Flex | ツール | ||
2127 | エラー | ツールトルクトランスデューサー校正エラー | ログ ディスプレイ | Flex StepSync | ツール | ||
2128 | エラー | メイントルクトランスデューサー:メイントランスデューサーでシャントテストに失敗しました | ログ ディスプレイ | Flex | ツール | ||
2129 | エラー | メイントルクトランスデューサー:シャントテストに失敗しました | ログ ディスプレイ | Flex StepSync | ツール | ||
2130 | エラー | メイントルクトランスデューサー:メイントランスデューサーでゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex | ツール | ||
2131 | エラー | メイントルクトランスデューサー:ゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex StepSync | ツール | ||
2132 | エラー | メイントランスデューサーでのツールトルクトランスデューサーハードウェアエラー | ログ ディスプレイ | Flex | ツール | ||
2133 | エラー | ツールトルクトランスデューサーハードウェアエラー | ログ ディスプレイ | Flex StepSync | ツール | ||
2134 | エラー | ツールトルクトランスデューサーエラー: メイントランスデューサーのA/Dコンバーターのオーバーフロー | ログ ディスプレイ | Flex | ツール | ||
2135 | エラー | ツールトルクトランスデューサーエラー: A/D コンバーターのオーバーフロー | ログ ディスプレイ | Flex StepSync | ツール | ||
2136 | エラー | 二次トランスデューサーでのツールトルクトランスデューサー校正エラー | ログ ディスプレイ | Flex | ツール | ||
2137 | エラー | ツールトルクトランスデューサーエラー: 二次トランスデューサーでシャントテストに失敗しました | ログ ディスプレイ | Flex | ツール | ||
2138 | エラー | ツールトルクトランスデューサーエラー: 二次トランスデューサーでゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex | ツール | ||
2139 | エラー | 二次トランスデューサーでのツールトルクトランスデューサーハードウェアエラー | ログ ディスプレイ | Flex | ツール | ||
2140 | エラー | ツールトルクトランスデューサーエラー: 二次トランスデューサーのA/Dコンバーターのオーバーフロー | ログ ディスプレイ | Flex | ツール | ||
2202 | エラー | ツールHMI過電流が発生しました | ツール HMI 過電流が検出されました。 | ツールの保守を行ってください。ツール HMI を交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2203 | エラー | ツールフロントライトの過電流が発生しました | ツールフロントライトの過電流が検出されました | ツールの保守を行ってください。ツールフロントライトを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2204 | エラー | アクセサリバスの過電流が発生しました | アクセサリバスの過電流が検出されました。 | ツールの保守を行ってください。アクセサリバスを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2207 | エラー | バイブレーター過電流が発生しました | バイブレーターの過電流が検出されました。 | ツールの保守を行ってください。バイブレーターを交換してください。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2208 | 警告 | システムCPUの温度高 | システムCPUの温度高。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | IxB | ツール |
2209 | エラー | システムCPUの温度がクリティカル | システムCPUの温度がクリティカルです。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | IxB | ツール |
2210 | エラー | 対応していない電源が接続されています。締め付けは許可されません | ツールに接続されているバッテリーの電圧が低すぎます。 | より高い電圧のバッテリーをツールに取り付けます。 | ログ ディスプレイ ACK Conf | IxB | ツール |
2500 | エラー | テンショナープーラーバー最大数 | テンショナープーラーバーを交換する必要があります。システムは使用できないようにロックされています。圧力は解放するこのみが可能です。 | テンショナーをサービス組織に送って、プーラーバーを交換してください。 | ログ ディスプレイ ACK | PFHC | ツール |
2501 | エラー | ポンプモーター保護アラーム | ポンプモーターの保護によりモーターが停止しました。システムは停止する必要があります。システムに圧力がかかっている場合は、手動で圧力を解放する必要があります。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、ポンプを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2502 | エラー | ポンプモーターオイルレベル低アラーム | ポンプモーターのオイルレベルが低いため、モーターが停止しました。システムに圧力がかかっている場合は、手動で圧力を解放する必要があります。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放してオイルを補充します。 | ログ ディスプレイ ACK | PFHC | ツール |
2503 | エラー | ポンプモーター油温高アラーム | ポンプモーターの油温高。 | システムの電源を切り、オイルが冷えるのを待ちます。 | ログ ディスプレイ ACK | PFHC | ツール |
2504 | エラー | テンショナー圧力センサーアラーム | テンショナーの圧力センサー電子部品の故障。圧力を読み取ることも、システムに報告することもできません。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、テンショナーを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2505 | エラー | ポンプ圧力センサーアラーム | ポンプの、圧力センサー電子機器の故障。圧力を読み取ることも、システムに報告することもできません。 | システムをオフにします。圧力がかかっている場合は、機械的に圧力を解放し、ポンプを修理に出します。 | ログ ディスプレイ ACK | PFHC | ツール |
2506 | エラー | 予期しない時計回りの回転が検出されました | テンショニングが完了したら、圧力が解放されるのを待っている間にナットを時計回りに回転させます。結果が無効化されます。 | 圧力を解放し、ナットに再びテンショニング力をかけます。 | ログ ディスプレイ Conf | PFHC | ツール |
2507 | エラー | 予期しない反時計回りの回転が検出されました | テンショニングが完了した後、圧力が解放されるのを待っている間にナットを反時計回りに回転させます。結果が無効化されます。 | 圧力を解放し、ナットに再びテンショニング力をかけます。 | ログ ディスプレイ Conf | PFHC | ツール |
2508 | エラー | ポンプまたはテンショナーの圧力センサーの故障 | ポンプとテンショナーの圧力センサーの読み取り値の差が大きすぎます。加圧が停止します。 | 油圧または圧力センサーのキャリブレーションに問題があります。システムを再起動して、もう一度やり直してください。問題が解決しない場合は、お近くのアトラスコプコ販売代理店までお問い合わせください。 | ログ ディスプレイ ACK | PFHC | ツール |
2509 | エラー | テンショナー圧力センサーの故障または油圧ホースの故障 | テンショナーの圧力センサーは圧力を示さないものの、ポンプのセンサーが圧力上昇を読み取る。加圧が停止します。 | 油圧または圧力センサーのキャリブレーションに問題があります。システムを再起動して、もう一度やり直してください。問題が解決しない場合は、お近くのアトラスコプコ販売代理店までお問い合わせください。 | ログ ディスプレイ ACK | PFHC | ツール |
2510 | エラー | カスタム ID の設定に失敗しました | カスタム ID の設定に失敗しました。 | システムを再起動し、接続されているデバイスを確認してください。ユニットのカスタムIDが間違っている場合は、設定をやり直してください。 | ログ ディスプレイ ACK | PFHC | ツール |
2511 | 情報 | カスタムIDが設定されました | カスタム ID の設定に成功しました。 | ログ ディスプレイ ACK | PFHC | ツール | |
2512 | 警告 | 不正な形式のバーコード文字列、無視されます | スキャンされた文字列をタワーデータバーコードとして解析できませんでした。 | スキャンされた文字列をタワーデータバーコードとして解析できませんでした。 | ログ ディスプレイ ACK | PFHC | ツール |
2513 | エラー | ポンプ圧が検出されませんでした | システムは加圧しようとしていますが、ポンプの圧力上昇は記録されていません。原因として、三相コネクタの位相順序が正しくないことが考えられます。 | システムの電源を切り、電源コネクタの位相を逆にします。 | ログ ディスプレイ ACK | PFHC | ツール |
2514 | 警告 | テンショナー過トルクアラーム | クリックレンチにかかるトルクが高すぎます。トルクセンサーの破損の原因となります。 | トルクを緩めます。 | ログ | PFHC | ツール |
2515 | 警告 | テンショナー過圧アラーム | テンショナー内の圧力が高すぎます。 | 圧力を落とすか、圧を逃します。油圧パラメータを確認してください。 | ログ | PFHC | ツール |
2516 | 警告 | 予期しないポンプまたはテンショナーのファームウェアです | 予期しないポンプまたはテンショナーのファームウェアバージョンが検出されました。システムを再起動してください。それでも問題が解決しない場合は、システムを実行できる可能性がありますが、予期しない動作がないか注意深く観察してください。 | 電源サイクルシステム | ログ ディスプレイ ACK | PFHC | ツール |
2517 | エラー | ポンプまたはテンショナーのファームウェアバージョンに互換性がありません。システムを再起動してください。システムを実行できません。 | ポンプまたはテンショナーのファームウェアバージョンに互換性がありません。システムを再起動してください。システムを実行できません。 | システムを再起動します。それでも問題が続く場合は、障害のあるユニットを交換してください。接続されているデバイスをチェックして、どのデバイスが接続されていないかを確認してください。 | ログ ディスプレイ ACK | PFHC | ツール |
3000 | エラー | コントローラー内部ソフトウェアエラー | コントローラーのソフトウェアエラー。 | サービスにご連絡ください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3001 | エラー | コントローラークロックバッテリー空 | 内部バッテリーが寿命に近づいています。 | バッテリーを交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3010 | 警告 | システム過熱 | コントローラーが過熱しています。 | クールダウンしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3011 | 警告 | コントローラーハードウェア駆動部が過熱しています | クールダウンしてください。 | ログ ディスプレイ Conf | Flex | コントローラー、ドライブ、StepSync | |
3013 | 警告 | コントローラーの温度が高いため、使用が制限されています | 温度制限値に達しました。過熱によるコントローラーのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | コントローラーの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3020 | 警告 | コントローラーハードウェア障害 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | ||
3021 | 警告 | システム電圧の問題 | DC 電圧が高すぎるか、低すぎます。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3022 | 警告 | コントローラーの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3023 | 警告 | コントローラーの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3024 | 警告 | ドライブの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3025 | 警告 | ドライブの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3030 | エラー | IP アドレスがネットワーク上の他のノードと競合しています | 設定された IP アドレスは、同じネットワーク上の別のデバイスによって使用されています。 | デバイスのうちの 1 つの IP アドレスを変更してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラー、ドライブ、StepSync |
3031 | 情報 | ネットワークケーブルが抜けています。 | 工場用ポートのキャリアが失われました(ケーブルの接続が解除されました)。 | ケーブルの接続を確認してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3032 | 情報 | ペアリング開始 | ツールペアリングが開始しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3033 | 情報 | ペアリング成功 | ツールペアリングが成功しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3034 | 情報 | ペアリングに失敗しました:ツールが見つかりません | コントローラーは、無線ピアにスキャンする際にペアリングするツールを見つけられませんでした。 | ツールをペアリングモードに設定し、再試行してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3035 | エラー | ペアリングに失敗しました:複数のツールが見つかりました | コントローラーは、無線ピアをスキャンする際に複数のツールを見つけました。 | コントローラーでペアリングモードを開始する際には、1 つのツールのみがペアリングモードになっていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3036 | エラー | ペアリングに失敗しました:通信エラー | コントローラーがペアリングプロセス中に、接続の喪失、想定外の応答、またはタイムアウトになりました。 | ペアリングを複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3037 | 情報 | ペアリングに失敗しました:ツールスロットが一杯です | 1つのツールスロットをクリアしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3040 | 警告 | 非常停止 | 緊急停止のためにドライブが無効になりました。 | 非常停止をリセットします。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3050 | 情報 | システムクロック更新 | システムクロックが更新されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラー、ドライブ、StepSync | |
3051 | エラー | システムクロックエラー | ハードウェアリアルタイムクロック(RTC)から読み出した時間が間違っています。 | RTC バッテリーを変更してください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | コントローラー、ドライブ、StepSync |
3052 | 警告 | リモート起動構成エラー | HW と SW リモート起動構成が一致していません。 | HW ディップスイッチが選択された開始ソースと一致していることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3053 | 情報 | ドライブが接続されました | StepSyncドライブが接続されました。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3054 | 情報 | ドライブが切断されました | StepSyncドライブが切断されました。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3055 | 警告 | モード構成エラー | 選択したモードが誤って構成されると生成されます。たとえば、同じボルト番号または同じチャンネルの2つのボルトの構成、不完全モード構成など。 | モード構成エラーについては、ToolsTalk2 を確認してください。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3056 | 警告 | 開始できません: ツールまたはドライブがありません | 使用されているチャンネルにドライブやツールがない場合に生成されます。 | HMIのチャンネルメニューを確認してください。喪失したドライブまたはツールを接続します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3057 | 情報 | 開始できません: チャンネルはすでに使用されています | 必要なチャンネルが別の仮想ステーションに割り当てられる場合に生成されます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3058 | 情報 | モードが選択されていません | モードを選択します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | |
3059 | 警告 | アトラスコプコのライセンスマネージャーへの接続に失敗しました | コントローラーが、ローカルのライセンスマネージャーに接続してライセンスを取得するのに失敗したことを示します。 | ローカルネットワークを検証してください。再び失敗する場合は、コントローラーの整備を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3061 | 警告 | 開始できません: 信号低を有効にします | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3062 | 警告 | 開始できません: 信号高を停止します | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3063 | 警告 | 開始できません: すべてのチャンネルが禁止されました | すべてのチャンネルが禁止されているため、締め付けを開始することができません。 | 少なくとも1つのチャンネルを禁止しないように設定します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3064 | 警告 | キャリア番号に問題があります | FlexCarrierの16進スイッチがゼロに設定されています。 | スイッチをゼロ以外の値に切り替えます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3065 | 警告 | キャリアの非常停止設定プラグのタイプが間違っているか、見つかりません | キャリアに非常停止構成プラグがないか、プラグのタイプが間違っています。 | 正しいプラグタイプを挿入してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3066 | 警告 | キャリア電圧入口: 三相ACなし | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3067 | 警告 | キャリア電圧入口: 1つのAC相がありません | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3068 | 警告 | キャリア:内部24 VDC電源装置が故障しています | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3069 | 警告 | キャリア24電圧出力ポートが過電流により無効になっています | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3070 | 警告 | キャリア、PF6 FlexControlケーブル出力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3071 | 警告 | キャリア、PF6 FlexControlケーブル入力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3072 | 警告 | 短絡による緊急停止 24 VDC 電源障害 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3073 | 警告 | 開始できません: システムが非常停止しました | 複数のスピンドルを割り当てる場合、このイベントは非常停止のために 「preStartCheckFailed」 によって呼び出されます。 | 非常停止をリセットします。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3074 | 警告 | キャリア過熱 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3075 | 警告 | キャリア温度 OK | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3076 | 警告 | キャリア:内部24 VDC電源が過負荷です | 内部PSUからの電流出力が高すぎます。 | PSUから電力供給を受けている他のキャリアを切断します。24 VDCを使用して外部機器をすべて取り外します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3077 | 警告 | キャリア:内部24 VDC電源電圧値超過 | 内部PSUからの電圧出力が高すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3078 | 警告 | キャリア:内部24 VDC電源電圧値過小 | 内蔵PSUからの電圧出力が低すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3079 | 警告 | キャリアへの外部供給:24VDC過電圧 | バックアップ入力電圧が27VDCを超えています。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3080 | 警告 | キャリアへの外部供給:24VDC不足電圧 | バックアップ入力電圧が19VDC未満です。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3081 | 警告 | キャリア電圧入口: 三相AC過電圧 | 入力電圧が高すぎます。 | 入力電圧を下げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3082 | 警告 | キャリア電圧入口: 三相AC不足電圧 | 入力電圧が低すぎます。 | 入力電圧を上げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3083 | エラー | Anybus/Profisafe モジュールファームウェアの間違い | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync | コントローラー、ドライブ、StepSync | ||
3084 | エラー | ソフト PLC ランタイムエラー | eCLR が制御不能な方法で終了しました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync | コントローラー、ドライブ、StepSync | |
3085 | 警告 | キャリア:ファンモジュールが故障しています | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3086 | 警告 | キャリア:ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3087 | 警告 | キャリア:左ファンモジュールの故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3088 | 警告 | キャリア:左ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3089 | 警告 | キャリア:右ファンモジュールの故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3090 | 警告 | キャリア:右ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3096 | 警告 | 携帯電話の信号強度低 | 移動体通信接続の RSSI 値が、定義されたしきい値である -98 dBm を下回っています。 | ツールを移動体通信アンテナに近づけると、接続が強化され、データの損失を防ぎます。 | Conf | IxB | コントローラー、ドライブ、StepSync |
3097 | 警告 | 携帯電話の接続が失われました | システムが移動体通信ネットワークへの接続を失いました。 |
| ログ ディスプレイ Conf | IxB | コントローラー、ドライブ、StepSync |
3100 | 警告 | モード構成が存在しません | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3150 | エラー | ソフトウェアIAMの非互換性 | IAMはコントローラーにインストールされたソフトウェアと互換性がありません | IAM を交換してください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3160 | エラー | 新しくインストールされたソフトウェアのライセンス認証に失敗しました | ライセンス認証中に問題が発生しました。新しくインストールされたソフトウェアが起動すると、以前に動作していたソフトウェアへのフォールバックが発生する。このエラーは、ソフトウェアのインストール中にのみ起こり、新しいソフトウェアが 3 回起動できなかった場合に発生します。 | エクスポートして、アトラスコプコまでご連絡ください。インストールしようとしているソフトウェアのバージョンと、機能しているソフトウェアのバージョンを書き留めてください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3161 | エラー | 予期しないソフトウェアパーティションで開始されました。 | コントローラーは、予期されたソフトウェア側ではなく、非アクティブなソフトウェア側で起動しました。 | ソフトウェア情報を書き留めます(コントローラーのホーム画面で、[コントローラー] > [ソフトウェア]を選択します)。コントローラーを再起動して、再起動時に正しいソフトウェアで実行されていることを確認してください。エラーが続く場合は、エクスポートしてアトラスコプコまでお問い合わせください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3500 | エラー | 一般ライセンスマネージャーエラー | 使用されている機能管理システムで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3501 | エラー | ライセンスマネージャー同期エラー | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | ||
3502 | 情報 | ライセンスマネージャー同期完了 | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |||
3503 | 警告 | ライセンスマネージャーー:別のソースが使用中 | ライセンスは別のソースによって使用されています。 | ライセンスの割り当てを確認してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3504 | 警告 | ライセンスマネージャーーの再起動が必要です | ライセンスマネージャーーを再起動してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3505 | 情報 | USB ライセンスの同期が開始しました | ログ | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | ||
3506 | エラー | USB ライセンスの同期エラー | ログ | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | ||
3507 | 情報 | USB ライセンスの同期が終了しました | ログ | Power Focus 6000 Power Focus 8 | コントローラー、ドライブ、StepSync | ||
3508 | 情報 | 1つまたは複数のライセンスの有効期限が近づいています。ライセンスサーバーが構成されていることを確認してください | ライセンスを更新します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3511 | 警告 | ライセンスの1つに異なるライセンス定義があります | 使用するライセンスで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3550 | 警告 | ライセンスがありません | 正しいライセンスをインストールしてください | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3551 | 警告 | ライセンスにより無線通信が無効になっています | 仮想ステーションからスタンドアロンライセンスの割り当てを解除します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
4010 | 情報 | ツールがデジタル入力によりロックされました。 | ツールは、デジタル入力信号によってロックされました。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4011 | 情報 | Open Protocolによるツールのロック | ツールはOpen Protocolによってロックされています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4012 | 情報 | フィールドバスによってロックされたツール | ツールは、フィールドバスによってロックされました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4013 | 情報 | ソケットセレクタによってロックされているツール | ソケットセレクタが仮想ステーションから切断されると、ツールがロックされます。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4014 | 情報 | ツールがソフト PLC によってロックされています | ソフト PLC 信号によってツールがロックされています。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4015 | 情報 | 緩め無効 | 締め付けプログラムで緩めが無効になっています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4016 | 情報 | 締め付け無効 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4017 | 情報 | 緩めが構成されていません | 選択された締め付けプログラムで緩めが構成されていません | 異なる締め付けプログラムを選択してください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4020 | 情報 | NG締め付けけが多すぎます | バッチ内の連続NG締め付けの最大値を超えています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4025 | 情報 | 締め付けプログラムが選択されていません | 締め付けプログラムが選択されていません。 | 締め付けプログラムまたはバッチシーケンスを選択します。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4030 | 情報 | バッチシーケンスが中止されました | バッチシーケンスが中止されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | 締め付け工程 | |
4031 | 情報 | バッチシーケンスを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4032 | 情報 | 最初の締め付けを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4035 | 情報 | ライン制御によりロック | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4040 | 情報 | 代替識別子によりロックされました | 代替識別子によりツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4050 | 無効なソケット構成 | 複数のソケットに締め付けプログラムが割り当てられています。 | 複数のソケットに締め付けプログラムが割り当てられています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4060 | 情報 | ツールがバッチ完了でロックされました | バッチシーケンス完了でフラグツールロックを使用してバッチを実行すると、ユーザーがトリガーを押した際にこのイベントが生成されます。 | 完了で信号のロック解除ツールを使用してロックを解除します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4070 | 情報 | プロセスが手動モードに入りました | 仮想ステーションで手動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4071 | 情報 | プロセスが自動モードに入りました | 仮想ステーションで自動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4072 | 情報 | テストボルト | Conf | Flex StepSync | 締め付け工程 | ||
4073 | 情報 | ツールのゼロ位置が更新されました | ツールのゼロ位置が信号を使用して設定されていることを示します。 | Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4100 | 警告 | 識別子は受け入れられません:文字列の長さが無効です | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4101 | 警告 | 文字列の選択に失敗しました:複数の一致 | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4102 | 警告 | 文字列の選択に失敗しました:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4103 | 警告 | 識別子は受け入れられません:同じ文字列がすでに受信されています | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4104 | 警告 | 識別子は受け入れられません:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4500 | 情報 | 結果ドライブエラー | 内部ドライブエラーまたはドライバ喪失が検出されました。 | Conf | Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4501 | 情報 | 結果リヒット | リヒット検出がオンのときにすでに締め付けたボルトを締め付ける試み。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4502 | 情報 | 結果ソフトスタートトルク低 | 最小レベル未満のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4503 | 情報 | 結果ソフトスタートトルク高 | 最大レベル超過のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4504 | 情報 | 結果セルフタップトルク高 | セルフタップトルク最大レベルを超過しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4505 | 情報 | 結果セルフタップトルク低 | 最小限度未満のセルフタップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4506 | 情報 | 結果安全トルク低 | トルクセンサーを正しく取り付けるための自動的に計算したトルク値。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4507 | 情報 | 結果ランダウントルク高 | 最大レベル超過のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4508 | 情報 | 結果ランダウン角度高 | 最大レベル超過のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4509 | 情報 | 結果ランダウン時間高 | 最大制限超過のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4510 | 情報 | 結果ランダウン時間低 | 最小制限未満のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4511 | 情報 | 結果ランダウントルク低 | 最小レベル未満のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4512 | 情報 | 結果ランダウン角度低 | 最小レベル未満のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4513 | 情報 | 結果最終トルク高 | 最大レベル超過の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4514 | 情報 | 結果最終角度高 | 最大レベル超過の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4515 | 情報 | 結果最終トルク低 | 最小レベル未満の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4516 | 情報 | 結果最終角度低 | 最小レベル未満の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4517 | 情報 | 結果締め付けタイムアウト | 締め付け時間制限が超過しました。一般的な締め付け戦略での、最大締め付け時間は30秒です。マルチステップの最大締め付け時間は、ステップ制限の最大時間によって異なります。エラーコードは締め付け段階によって異なります。 | 締め付けの再実行。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4518 | 情報 | 結果トリガー喪失 | ターゲットに達する前にツールトリガーがリリースされました。 一般的な締め付け戦略で、締め付け段階が終了する前にトリガーを解除することは許可されていません。 マルチステップでは、特定のステップの目標に達する前にトリガーが解除されると、エラーが表示されます。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4519 | 情報 | 早期のトルク喪失 | ソケットがナットから脱落しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4520 | 情報 | 結果最終ステップ前にターゲットに到達 | 締め付けプログラムの最終ステップの前にターゲットトルクに達しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4521 | 情報 | 結果ポストビュートルク低 | 最小レベル未満のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4522 | 情報 | 結果ポストビュートルク高 | 最大レベル超過のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4523 | 情報 | 結果ポストビュートルク間隔に達していません | ポストビュートルク間隔に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4524 | 情報 | 結果トルク補正間隔に達していません | ランダウン終了前にトルク補正間隔角度に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4525 | 情報 | ツールの動き超過の結果です | NG 締め付け詳細状態から。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4526 | 情報 | 結果 SafetyCurrMon センサー不一致 | 電流監視エラー。 | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4527 | 情報 | ツールの動き超過の結果です | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |||
4538 | 情報 | 結果最終監督トルク低 | 最終監督トルクに達しませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4543 | 情報 | 結果スナッグモニター高 | レンチ専用。モニターが着座レベルを超えていることを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4545 | 情報 | 結果残留トルクなし | レンチ専用。残留トルクがしきい値未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4546 | 情報 | 結果過速度 | レンチ専用。レンチジャイロが、速度が速いために角度を測定できませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4547 | 情報 | 結果有効な緩め | レンチ専用。レンチが予期しない緩めを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4548 | 情報 | 結果最終が目標未満 | 最終トルクが、締め付けプログラムで設定されたターゲットトルク未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4549 | 情報 | TurboTight 時間制限超過 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4550 | 情報 | 結果ランダウンパルス高 | ランダウンパルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4551 | 情報 | 結果ランダウンパルス低 | ランダウンパルスの最小数に達する前にランダウンが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4552 | 情報 | 結果最終パルス高 | パルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4553 | 情報 | 結果最終パルス低 | パルスの最小数に達する前に締め付けが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4554 | 情報 | シャットオフ高時の電流 | シャットオフ時の電流が電流上限を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4555 | 情報 | シャットオフ低時の電流 | 測定されたシャットオフ電流が電流下限未満でした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4556 | 情報 | 未分類のマルチステップエラー | マルチステップ構成のエラー。多くの場合はツール検証に関するエラーです。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4557 | 情報 | 結果は過負荷です | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4600 | 警告 | バッチ締め付けと組み合わせて使用されたデータドロップまたはデータ保持。信号には効果がありません。 | データドロップとデータ保持は、バッチ制御なしのワークタスクでのみサポートされます。信号を使用する必要がある場合は、別のワークタスクを選択してください。 | Flex StepSync | 締め付け工程 | ||
4601 | 情報 | データ保持が有効:信号が低になると、締め付け結果が送信されます。 | Flex StepSync | 締め付け工程 | |||
4602 | 情報 | データドロップが有効:締め付け結果が破棄されます | Flex StepSync | 締め付け工程 | |||
5010 | 警告 | 無効な締め付けプログラムパラメータ値 | 選択した締め付けプログラムのパラメータが無効です。 | パラメータの値を見つけて変更するには、選択した締め付けプログラムの構成をチェックしてください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | プログラム構成 |
5011 | 警告 | ツールでプログラムストレージを準備できませんでした | STB ツールで現在のプログラムストレージサイズを読み取ったり、更新された (または新しく選択された) 締め付けプログラムを STB ツールにダウンロードするためのプログラムストレージを準備したりすることはできません。 |
| ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | プログラム構成 |
5020 | 情報 | メイントリガーは有効な開始ソースではありません | プッシュスタートのみ構成され、ユーザーがメイントリガーを押した場合のみ生成されます。ユーザーがプッシュスタートを押すまでに生成されます。 | プッシュスタートを押してツールを開始します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | プログラム構成 |
5030 | 情報 | 締め付けプログラムの複雑度がツールの容量を超えています | 選択された締め付けプログラムが、使用している STB ツールに複雑すぎます。ツールはロックされます。 | 締め付けプログラムの複雑性を低下させるか、別のプログラムを選択してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | プログラム構成 |
6010 | 情報 | 接続アクセサリ | アクセサリがコントローラーに接続されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリ | |
6020 | 情報 | 未接続アクセサリ | アクセサリがコントローラーから切断されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリ | |
6021 | 警告 | フィールドバスオフライン | フィールドバスとの通信がありません。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリ | |
6030 | 警告 | アクセサリアドレスが競合しています | 同一アドレスのアクセサリが複数接続されています。 | アクセサリのアドレスを変更します。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリ |
6040 | 警告 | アクセサリ通信エラー | アクセサリの断続的通信エラーが発生しました。 | ケーブルとコネクタを確認します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリ |
6041 | 警告 | フィールドバスエラー | フィールドバスとの通信エラー。 |
| ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリ |
6042 | 警告 | フィールドバスモジュールの不一致 | インストールされたフィールドバスモジュールが構成されたモジュールと一致しません。 | インストールされているモジュールと一致するように構成を変更するか、インストールされているモジュールを正しいものと交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリ |
6043 | 警告 | フィールドバス出力バッファオーバーフロー | フィールドバス通信に使用されている出力バッファが使い果たされ、バッファのオーバーフローが発生しました。1つ以上の信号更新が破棄されました。 | フィールドバス通信とフィールドバス診断(使用されている場合)を停止して、バッファを回復します。 このイベントが頻繁に発生する場合は、PLCプログラムを含むフィールドバス通信の設定を確認してください。更新間隔と比較して更新が多すぎると、このシナリオが発生する可能性があります。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリ |
6044 | 警告 | フィールドバス プロバイダーIDの不一致 | インストールされているフィールドバスモジュールはサポートされていません。 | サポートされているAtlas Copcoフィールドバスモジュールを接続します。 | ログ ディスプレイ ACK | Power Focus 8 | アクセサリ |
6050 | 情報 | 間違ったソケットが選択されました | ソケットが選択されていないか、間違ったソケットが選択された場合に生成されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | アクセサリ | |
6090 | 警告 | バーコードスキャナが特定できませんでした | 固有のシリアル番号が見つからない場合。 | バーコードリーダーのデバイスを構成します。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | アクセサリ |
7010 | 情報 | 表示するメッセージのテキスト | メッセージを表示する一般的イベントです。 | ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC PFHC | メッセージ | |
8200 | 情報 | シリアルポートを開くことができませんでした | 使用するシリアルポートを開くことができませんでした。 | シリアルポートの接続を確認してください。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | その他 |
8300 | 警告 | オープンプロトコルクライアントの通信がタイムアウトしました | オープンプロトコルクライアントへの通信がタイムアウトしました。予想される時間内にキープアライブメッセージまたはコマンドは送信されませんでした。 |
| ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | その他 |
8214 | エラー | EHMI ソフトウェアバージョンが一致していません | EHMIソフトウェアのバージョンがコントローラーとの互換性において一致しません。 | EHMIのソフトウェアバージョンを更新してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | その他 |
Conf - イベントコードのリスト
次に利用可能 - イベントコードのリスト
イベントコードが利用可能な製品のリスト。
グループ - イベントコードのリスト
イベントコードが属するグループ。
イベントの説明
イベントの簡単な説明と、それが起こった理由。
手順 - イベントコードのリスト
該当する場合、手順には、イベントを消去する方法についての指示が含まれます。
ログ - イベントコードのリスト
イベントがイベントログに保存されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
ディスプレイ - イベントコードのリスト
イベントが画面で表示されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
Ack - イベントコードのリスト
続行する前にイベントを確認しなければならないかどうかをユーザーに通知します。このリストの値はデフォルト値です。
イベントコード
一意のイベント番号。
イベントの種類 - イベントコードリスト
イベントの種類:情報、警告、およびエラー。
イベント名
イベントの簡単な名前
[設定] タブの操作
ネットワーク構成
ツール は、Web ブラウザか、IPv4 プロトコルを使用して、ローカル エリア ネットワーク(LAN)でアクセスするよう設定できます。
ツールをクライアントとして使用するか、他のデバイスのアクセスポイントとして使用するかを選択できます。
準備
ハンドコントローラーのUSB接続ポートのカバーを開きます。
ハンドコントローラーのUSB-CコネクタにPCを接続します。PCがハンドコントローラーに十分な電力を供給していることを確実にするには、このUSB-3.0ポートを使用してください。
構成 GUI を開くには、ブラウザに次のアドレスを入力します:164.254.1.1/config.html。
詳細については、「Web ブラウザの要件」セクションを参照してください。
関連情報
チャンネルの構成
ホームメニューの[設定]に移動し、左側のペインで[ネットワーク]を選択します。
「チャンネル」フィールドで、周波数 (2.4 GHz または 5 GHz) を選択し、[編集] を選択します。
チャンネルを有効にするか無効にするかを選択します。
ワイヤレスクライアントの構成
ホームメニューの[設定]に移動し、左側のペインで[ネットワーク]を選択します。
[ワイヤレスクライアント]フィールドで、[編集]を選択INます。
[有効]を[オン]に設定します。
構成に応じて、 DHCPをオンまたはオフに設定します。オフに設定されている場合は、ローカルシステム管理者から提供された必要な情報を入力します。
IP address (IP アドレス)
サブネットマスク
Gateway (ゲートウェイ)
ネットワーク名 (SSID)を入力します。
[セキュリティ]フィールドで、[モード]を選択し、リストからセキュリティモードを選択します。WPA2 パーソナルを選択した場合は、セキュリティキーを入力します。
必要に応じて、セキュリティパラメータを入力し、証明書ファイルとキーをインポートします。
必要に応じてオプション設定を編集します。
適用を選択します。
すると、ツールはネットワークへのワイヤレス接続を確立します。これは、ツールの青色の接続 LED インジケーター点灯によって示されます。
ユーザーインターフェイスにワイヤレスでアクセスするには、WebブラウザにIPアドレスを入力します。
ツールをワイヤレスアクセスポイントとして構成する
以前にワイヤレスクライアントモードで複数のチャンネルが構成されている場合、ワイヤレスAPモードを有効にすると、チャンネルリストが更新され、ワイヤレスAPモードの現在/デフォルトのチャンネルのみが含まれるようになります。
ホームメニューの[設定]に移動し、左側のペインで[ネットワーク]を選択します。
[ワイヤレスクAPト]フィールドで、[編集]を選択します。
[有効]を[オン]に設定します。
ローカルシステム管理者から提供された必要な情報を入力します。
IP address (IP アドレス)
サブネットマスク
Gateway (ゲートウェイ)
IPアドレスを配布するには、 DHCPサーバーをオンに設定し、IP範囲の開始とIP範囲の停止を入力します。
ネットワーク名 (SSID)を入力します。
[セキュリティ]フィールドで、[モード]を選択し、リストからセキュリティモードを選択します。WPA2 パーソナルを選択した場合は、セキュリティキーを入力します。
適用を選択します。
サーバー接続
ハンドコントローラーは、以下のアトラスコプコソフトウェア製品を実行しているサーバーと通信するようにセットアップが可能です:
ToolsNet − 結果レポートを処理するのに使用します。
本セクション内
ToolsNet接続の構成
ホームメニューの[設定]に移動し、左側のペインで[サーバー接続]を選択します。
ToolsNetフィールドで、次のパラメータを設定します:
フィールド
説明
オン/オフ
ToolsNet サーバーとの通信を有効/無効にします
サーバーポート
ToolsNet サーバーポート
サーバーホスト
ToolsNet サーバーの IP アドレス
適用を選択します。
ToolsNet の接続ステータスを表示するには、[レポート] > [結果] に移動して ボタンを選択します。表示されるダイアログボックスで、[サーバー接続]タブを選択します。
ボタンを選択します。表示されるダイアログボックスで、[サーバー接続]タブを選択します。
ToolsNetの構成方法については、ToolsNet 8ユーザーガイドを参照してください。
リモートロギング接続の構成
コントローラーをリモートロギングサーバーに接続するには、コントローラーでリモートロギング設定を構成してアクティブにします。
ホームビューで、[設定]タブに行き、左側のペインで[サーバー接続]を選択します。
リモートロギング ウィンドウで、次のパラメータを構成します。
フィールド | 説明 |
|---|---|
オン/オフ | リモートロギングサーバーとの通信を有効/無効にします。 |
TCP/UDP | TCP または UDP プロトコルを選択します |
サーバーホスト | リモートロギングサーバの IP アドレス |
サーバーポート | リモートロギングサーバーポート |
ログレベルの構成
リモートロギングサーバーに保存されるログを構成するには、次の手順に従います。
ホームビューで、[設定]タブに行き、左側のペインで[サーバー接続]を選択します。
[リモートロギング]ウィンドウで、[構成]を選択します。
[設備の構成] ウィンドウで、該当するチェックボックスを選択します。
カテゴリ
SysLog 分類
エラー
アラート、クリティカル、非常、エラー
警告
警告
情報
情報、通知
選択内容を前の構成に戻すには、[元に戻す] を選択します。
適用を選択します。
プリファレンス
日時
日時は、イベントや結果が生じたときに正しいタイムスタンプを取得するように設定する必要があります。時間は、次の 3 つの利用可能なソースのいずれかから取得します。
手動 - 日付、時刻、およびタイムゾーンは手動で設定します。
NTP -日付と時刻は、ユーザーインターフェイスで定義されたNTP(ネットワークタイムプロトコル)サーバーから取得されます。
ToolsNet - 日付と時刻はツールネットサーバーから取得されます。
NTP と ツールネット タイムソースには機能的なネットワーク接続が必要です。
日時の設定
ホームメニューの[設定]に移動し、左側のペインで[ユーザー設定]を選択します。
[日時] フィールドで、次のパラメータを設定します:
パラメータ
説明
ソース
時刻を取得するためのソース。
NTP サーバー 1
ツールに対して日時を提供する NTP サーバーの IP アドレス。
サーバー 1 ステータス
OK/ステータスなし
NTP サーバー 2
ツールに対して日時を提供する NTP サーバーの IP アドレス。
サーバー 2 ステータス
OK/ステータスなし
日付
ソースが手動に設定されている場合は、手動で入力した日付。
時間
ソースが手動に設定されている場合は、手動で入力した時刻。
タイムゾーン
タイムゾーン。現地のタイムゾーンまたは UTC(協定世界時)などの標準タイムゾーンのいずれか
[適用] を選択します。
言語設定
ユーザーインターフェイスは、次の 12 言語で利用できます:
英語
チェコ語
ドイツ語
スペイン語
フランス語
韓国語
イタリア語
日本語
ポルトガル語
ロシア語
スウェーデン語
中国
言語の変更
ホームメニューの[設定]に移動し、左側のペインで[ユーザー設定]を選択します。
「言語」フィールドで、現在使用中の言語を選択し、リストから言語を選択します。
言語の変更はすぐに反映されます。
トルクの単位を設定します
トルクの結果は、締め付けを行った後と、結果リストに保存した際の両方で、選択した単位で表示されます。
ユニット | 説明 |
|---|---|
cNm | センチニュートンメートル |
dNm | デシニュートンメートル |
Nm | ニュートンメートル |
kNm | キロニュートンメートル |
in·lbf | インチ・ポンド力 |
ft·lbf | フィート・ポンド力 |
in·ozf | インチ・オンス力 |
ft·ozf | フィート・オンス力 |
gf·cm | グラム力・センチメートル |
kgf·cm | キログラム力・センチメートル |
kgf·m | キログラム力・メートル |
圧力単位
圧力単位の設定
ホームメニューの[設定]に移動し、左側のペインで[ユーザー設定]を選択します。
「圧力単位」フィールドで、リストから [Bar] または [Pa] 単位を選択します。
PIN設定の構成
PIN コードを使うことで、Web GUI の不正利用や偶発的な変更を防ぐことができます。
有効にすると、Web GUI から構成を変更するときに PIN コードが必要になります。
本セクション内
PIN の構成
Web GUI には、1つまたは多数のそれぞれ異なるPIN構成を設定できます。ユーザーは、1つまたは複数のPIN構成を同時に有効化するかどうかを決定できます。
各PIN構成には、PINコード、ユーザー名、ユーザー/ PINを有効または無効にするためのスイッチ、およびユーザーがアクセスできる使用可能な構成のリストがあります。
PINが有効化されており、画面がロックされている場合、GUIの右上隅にロックされたた南京錠のアイコンが表示されます。ユーザーは、選択された構成にのみPINコードを入力せずにアクセスして変更を加えることができます。また、選択されていない構成は、読み取り専用アクセスのみで参照できます。選択されていない構成はグレー表示されるか、無効になります。
画面ロックは、一定時間操作がないと自動的にオンになり、この時間はユーザーが構成できます。
アイドル時間の最小値は20秒で、最大値は600秒です。アイドル時間は構成可能で、すべてのPIN構成に適用されます。
システムの起動後、現在のアイドル時間に関係なく、PINがオンの場合、コントローラーはロックされます。
構成されたユーザーとPINは、サービスポート(169.254.1.1)にも適用されます。
サービスポートでPIN保護を有効にするには、[PIN]ウィンドウで[サービスポートにPINを使用]を[オン]に設定します。
各コントローラーは、最大10人のユーザーを構成できます。
各構成のPINは一意である必要があります。コントローラーでPIN機能を有効にするには、少なくとも1つの構成が必要です。
PIN は、Web GUI から構成できます。
新規ユーザーの追加
ホームビューで、[設定]タブを選択します。次に、左側で[PIN]を選択します。
[PIN]ウィンドウで、[構成]を選択します。
GUIの右上隅にあるプラスアイコンを選択します。
[PIN-ユーザー]ウィンドウに新しいユーザーが表示されます。Web GUI に格納されているユーザーがない場合、新しいユーザーはリストの最初で唯一のユーザーになります。Web GUI に格納されている既存のユーザーが存在する場合、新しいユーザーはリストの最後になります。新規ユーザーを選択します。
[ユーザー]ウィンドウが表示されます。
新規ユーザーの名前とPINを入力し、PINを確認入力します。ユーザー名は一意である必要があります。
[名前]テキストボックスの文字数は1〜32文字です。PINコードの長さは4桁(1~9)である必要があります。
変更を適用するにはPIN入力ボックスとPIN確認入力ボックスの入力が同一である必要があります。既定では点が両方のフィールドで示されますが、これらは PIN の単なるプレースホルダーであり、実際の PINコードで置き替える必要があります。[権限]を選択します。使用可能な構成のリストが表示されます。
ユーザーがアクセスして変更できる、必要な構成の左側にあるチェックボックスを選択します。
必要な構成を選択した後、[OK]を選択します。
[ユーザー]ウィンドウが表示されます。[すべて選択]は、使用可能なすべての構成を同時に選択します。
チェックボックスをオフにして選択を取り消すには[すべて選択解除]を選択します。ユーザーは、[アクセス許可]ウィンドウで選択した構成にのみアクセスして変更を加えることが可能で、選択されていない構成は読み取り専用アクセスで参照できます。選択されていない構成に対する変更は許可されません。
[ユーザー]ウィンドウで、[適用]を選択します。
ユーザーの有効化
ホームビューで、[設定]タブを選択します。次に、左側で[PIN]を選択します。
[PIN]ウィンドウで、[構成]を選択します。
[PIN ユーザー] ウィンドウで、有効にするユーザー名の左側にあるチェックボックスをオンにします。
[ユーザー]ウィンドウでユーザー名をクリックして有効スイッチをオンに設定すると、PINを有効にすることができます。
PIN構成の有効化
ホームビューで、[設定]タブを選択します。次に、左側で[PIN]を選択します。
[PIN]ウィンドウで、[構成]を選択します。
[PIN有効化]ウィンドウで、 PINコードスイッチをオンに設定します。
PIN は、少なくとも 1 人のユーザー / PIN が有効になっている場合にのみ有効化することができます。ユーザー / PIN が有効になっていない場合は、警告ポップアップウィンドウが表示されます。
画面が自動的にロックされるまでの時間を定義するアイドル時間タイムアウト (秒単位)を入力します。
イドル時間タイムアウトの既定値は120秒間です。これはグローバル設定であり、ユーザーごとに設定することができません。
Web GUI のロック解除
ホームビューで、GUIの右上隅にある南京錠アイコンを選択します。テンキーのポップアップウィンドウが表示されます。
構成したPINコードを入力して、[OK]を選択します。
PINが有効化されており、画面のロックが解除されている場合、GUIの右上隅に開錠した南京錠のアイコンが表示されます。Web GUIは、[開錠した南京錠] のアイコンを選択すると、手動で再度ロックできます。
ユーザーの無効化
ホームビューで、[設定]タブを選択します。次に、左側で[PIN]を選択します。
[PIN] ウィンドウで、[構成]を選択します。
[PINユーザー]ウィンドウで、無効にするユーザー名の左側にあるチェックボックスの選択を解除します。
[ユーザー]ウィンドウでユーザー名をクリックして有効スイッチをオフに設定すると、PINを無効にすることができます。
ユーザーの削除
ホームビューで、[設定]タブを選択します。次に、左側で[PIN]を選択します。
[PIN] ウィンドウで、[構成]を選択します。
[PIN ユーザー] ウィンドウで、削除するユーザー名の右側にある削除アイコンを選択します。
ユーザーが削除されると、 PINも削除されます。削除されたPINを介して構成にアクセスすることはできません。
イベント設定の構成
以下のいずれか一つ、またはいくつかについて、コントローラで使用可能なイベントを設定できます。
確認済み
ログイン済み
表示済み
拡張ロギングの構成
PFHCはログを自動的に作成して保存します。これらのログは、ロググループを使用して拡張ロギングを含めるように構成できます。
本セクション内
ロググループの構成
ロググループのデフォルト設定はオフです。ロググループの設定をオンに変更するには:
ホームビューで、[設定] タブに行き、左側のペインで [拡張ロギング] を選択します。
[ロググループ] ウィンドウで、グループを [オン] に設定します。
ロググループのリセット
すべてのロググループをデフォルト設定にリセットすることができます。
ホームビューで、[設定] タブに行き、左側のペインで [拡張ロギング] を選択します。
[ロググループのリセット] ウィンドウで、[リセット] を選択します。
すべてのロググループをリセットするかどうかを確認するポップアップウィンドウが表示されます。[YES] を選択します。
永続ロググループ
ロググループは、再起動するたびにデフォルト設定にリセットされます。リセットを防ぐには、永続ロググループを使用します。
ホームビューで、[設定] タブに行き、左側のペインで [拡張ロギング] を選択します。
[再起動後に選択を保持] ウィンドウで、[永続] を [オン] に設定します。
リセット
出荷時設定リセットコントローラー
コントローラーを工場出荷時の元の設定に戻すことができます。
コントローラーをリセットすると、すべての設定、構成、および履歴データが削除されます。工場出荷時の状態へのリセットは、リセットが確実に必要な場合にのみ行ってください。
コントローラーの工場出荷時へのリセット実行
ホームビューで、[設定]タブを選択します。次に、左側で[リセット]を選択します。
[コントローラーの工場出荷時設定へのリセット]ウィンドウで、[リセット]を選択します。
すべてのデータが削除されることを警告するポップアップウィンドウが表示されます。次に、[はい]を選択します。
コントローラーが再起動し、新しい設定が有効になります。
結果のクリア
コントローラーに保存されている結果やイベントは削除することができます。
結果とイベントの削除
ホームビューで、[設定]タブを選択します。次に、左側で[リセット]を選択します。
[結果のクリア]ウィンドウで、[クリア]を選択します。
すべての結果とイベントが削除されることを警告するポップアップウィンドウが表示されます。次に、[はい]を選択します。
コントローラーの電源を切り、30秒間待ってからもう一度電源を入れます。
[ヘルプ] タブの使用
このセクションは、Web GUI での作業に役立つ情報を提供します。このタブには Power Focus HC ユーザーマニュアルが組み込まれています。章は左側のパネルにあります。
操作
このセクションには、製品の操作方法をステップ・バイ・ステップで説明します。
コントローラー GUI
システムの開始
ハンドコントローラーのタスクメニューは起動中、グレー表示になり、システムの起動が完了するまで使用できません。
システムの起動時には、次のことが起こります:
ポンプとテンショナーが始動し、ハンドコントローラーとの通信を確立します。
ポンプまたはテンショナーのファームウェアバージョンがハンドコントローラーのソフトウェアバージョンと互換性がない場合、ファームウェアのバージョンは互換性のあるバージョンに更新されます。このプロセスは、テンショナーの LED で確認できます。これは、ファームウェアの互換性チェック中および可能な更新プロセス中に青色になります。テンショナーのステータス LED の点滅が止まり、白色に点灯すると、テンショナーはハンドコントローラーとの接続を確立しています。
ポンプまたはテンショナーのファームウェアがハンドコントローラーの予想と異なる場合は、イベント 2516「予期しないポンプまたはテンショナーのファームウェアバージョンが検出されました。システムを再起動してください。」が発生します。それでも問題が解決しない場合は、システムを実行できる可能性がありますが、予期しない動作がないか注意深く観察してください。」がトリガーされます。報告されたファームウェアがハンドコントローラーで互換性のないファームウェアバージョンのリストにある場合、ハンドコントローラーはイベント 2617「ポンプまたはテンショナーのファームウェアバージョンに互換性がありません。システムを再起動してください。」を発します。システムを実行できません。」互換性のないファームウェアである場合、ハンドコントローラーは [ホーム] -> [タスク] を有効化しません。いずれの場合でも、システムを再起動し、更新に失敗したユニットでもう一度更新を実行させます。
ハンドコントローラーの名前はIAMで変更することができます。インテリジェントアプリケーションモジュール(IAM:Intelligent Application Module)のセクションを参照してください。
接続状態
ワイヤレス接続ステータスと ToolsNet 接続ステータスのアイコンには、接続状態のライブ更新が表示されます。ハンドコントローラーは [設定] -> [ネットワーク] で Wi-Fi に接続するように構成されている場合、Wi-Fi に接続します。
ワイヤレスが接続されていて、HC が Wi-Fi ネットワークにアクティブに接続されている場合、Wi-Fi 接続アイコンが斜めの線なしで表示されます。
ハンドコントローラーが ToolsNet に接続するように構成されている場合、アイコンの状態は接続の状態を反映します。斜めの線は、ToolsNet への接続が開いていないことを意味します。
ホーム画面
3 つのコンポーネントすべてが起動プロセスを完了し、システム通信が開始されると、[タスク] メニューが使用可能になります。
警告とリマインダー
システムにポンプまたはテンショナーのステータスに関する警告または情報メッセージが表示されると、接続されているデバイスのアイコンが青い枠で強調表示され、メッセージの数が表示されます。[接続されているデバイス] タブに入ると、情報または警告アイコンに、追加情報がある場所が示されます。一部のステータスは、ホーム画面に警告バナーとしても表示されます。
油の交換リマインダー
次のオイル交換までの時間が 4 週間未満の場合、またはモーターの稼働時間が残り 50 時間に達した場合、オイル交換のリマインダーが表示されます。
次のオイル交換日まであと 28 日間、およびモーター稼働時間の残り 50 時間は、情報アイコンが表示されます。
オイル交換日が過ぎた場合、またはモーターの稼働時間が上限に達した場合、情報アイコンは警告になります。
[タスク] タブの使用
タスクメニューは、ポンプとテンショナーの両方がハンドコントローラーに接続されている場合に使用できます。
有効な構成を持つタスクのみがハンド コントローラー GUI に表示されます。
たとえば、アセンブリの構成がない場合は、アセンブリもバッチアセンブリも使用できません
手動モードは常に存在します。
アセンブリ と ボルトサービス は、たとえば、トレーニングやテストの目的で、1 つのボルトに対して 1 回の実行を許可します。
ハンドコントローラーでは次のタスクを実行できます:
アセンブリ:ステップテンショニング構成を一回のみ実行します。
バッチアセンブリ:ステップテンショニング構成のバッチジョブを実行します。オペレーターは、このジョブを開始する前に追加情報を入力する必要があります。
手動モード:テンショニングプロセスを手動で制御できます。このプロセスはどのテンショナーでも実行できます。
ボルトサービス:ボルトサービス構成を一回のみ実行します。
バッチボルトサービス:テンショニングサービス構成のバッチジョブを実行します。オペレーターは、このジョブを開始する前に追加情報を入力する必要があります。
手動モードを使用して、ボルトのテンショニング力を緩めたり、ボルトを緩めたりします。適切な緩め方法を使用することが推奨されます。テンショニング力の緩めの詳細については、「ナットのテンショニング力の緩め」のセクションを参照してください。
関連情報
テンショニング操作を用意にする GUI
テンショニング操作用のハンドコントローラー GUI 画面には、フル GUI とシンプル GUI の 2 種類があります。
フルGUIには、フランジにかかる圧力、トルク、角度、および力の測定値が表示されます。
シンプル GUIは、テンショナーのLEDに似たより簡潔なオペレーターGUIであるため、ハンドコントローラーのLEDはテンショナーのLEDと同じ状態を示します。
ハンドコントローラーの上下ボタンを使用して、これら 2 つの GUI 画面を切り替えることができます。

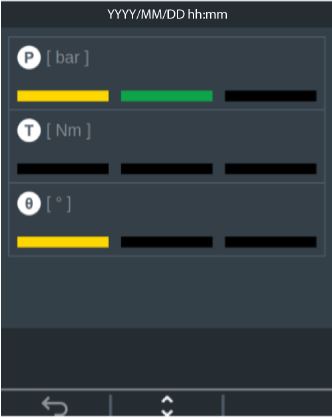
アセンブリ
アセンブリタブには、接続されているテンショナーと互換性のある、設定済みのテンショニングプログラムのリストがあります。互換性のあるプログラムがない場合は、画面の下部に次のメッセージが表示されます。互換性のあるプログラムはありません。
[ホーム] ビューで、[タスク] > [アセンブリ] に移動します。
上ボタンと下ボタンを使用してリスト内を移動して実行するプログラムを選択し、中央の [Enter] ボタンを押して選択を確定します。
リストに表示される名前は、[一般設定] > [プロパティ] タブの [名前] フィールドから取得されます。
画面に「ボルト上にツールを配置」というメッセージが表示されたら、テンショナーをボルトの真上に当てます。
ソケットとナットの位置が揃っていることを確認してください。
テンショニング操作を開始するには、キーパッドの [進む] ボタンを押します。
関連情報
本セクション内
テンショニング作業
テンショニング作業は次のフェーズで構成されます。
取り付け確認
加圧フェーズ
ナット締め付け
テンショニング作業中、テンショニングはいつでも中止できます。
システムがユーザー操作を待機している間、数秒後にヘルプテキストが表示され、期待されるアクションが検出されるとすぐに表示されなくなります。
取り付け確認
取り付け確認の目的は、角度測定の基準点を作成することです。
取り付け確認中にテンショナーが回転しないように、加圧ボタンを押してください。
特に長い間使用のなかった後の最初の稼働では、圧力不足が起きる可能性があります。その場合は、もう一度加圧ボタンを押してください。
圧力がオーバーシュートする可能性があります - システムはユーザーに圧力を解放して再試行するように促します。
オーバーシュートは、「角度リセット力」のパラメータが原因で発生する可能性があります。「テンショニングパラメータ」の項を参照してください。
ナットを時計回りに回して、取り付け確認トルクのパラメータで設定されたトルクレベルを達成させます(デフォルト値は20 Nm)。少なくとも取り付け確認トルク継続時間 (デフォルト値は1秒)の間トルクを維持してください。
3 つの LED がすべて緑色に点灯します。
クリックレンチにかかる力を解放します。
加圧フェーズ
締め付けが終わるまで、加圧ボタンを押し続けます。
テンショナーの角度の横列にあるLEDとハンドコントローラーに対応するLEDが点灯したら、ボルトの伸びに従ってナットを動かします。
目標圧力に達するまで、ナットにトルクをかけないでください。圧力に仕事を任せます。
ナット締め付け
加圧ボタンを押したままにすると、システムの圧力が最小ボルトテンショニング圧パラメータより高く保たれます。
圧力はゆっくりと低下し、システムは圧力が最小圧力を下回る前に加圧します。
ナットを締め付け目標トルクまで締め、 トルクを締め付けトルクの継続時間(秒)の間保持します。
この条件が満たされると、すべての LED が点灯します。
トルクを緩めます。
自動圧力リリースパラメータがオンの場合、システムはトルクが10 Nm未満に緩められると圧力を解放します。
自動圧力リリースパラメータがオフの場合は、[減圧ボタン] を使用して圧力を解放します。
圧力が解放されると、 OK または NG の結果がハンドコントローラーに表示されます。いずれの場合も、詳細ビューには記録された圧力/力の角度とトルクの測定値が表示されます。
中止中
実行中のタスクはいつでも中止できますが、その前にシステム圧力を解放する必要があります。
[減圧ボタン] を押して圧力を解放します。
[戻る] ボタンを押してテンショニング操作を終了します。
バッチ ジョブ中にテンショニング操作を中止する場合、ユーザーには次の 2 つの選択肢が与えられます:
ボルトをキャンセル:ボルト番号が間違っている場合に使用します。ハンドコントローラーのGUIは「ボルト上にツールを配置」の画面に戻ります。
バッチを中止する:テンショニングジョブを一時停止または停止する必要がある場合に使用します。
アセンブリジョブを実行すると、ハンドコントローラー GUI はタスクメニューに戻ります。
バッチアセンブリ
同じテンショニング構成を使用して指定回数の連続テンショニングを実施するよう、バッチが設定されます。
ホームビューで、[タスク] > [バッチアセンブリ] に移動します。
上ボタンと下ボタンを使用してリスト内を移動して実行するプログラムを選択し、中央の [Enter] ボタンで選択を確定します。
リストに表示される名前は、[一般設定] > [プロパティ] タブの [名前] フィールドから取得されます。
必要に応じて、次の 2 つの選択肢から 1 つを選択します: タワーセクションIDまたはタワーデータ
フランジ識別子をスキャンします。
特定のフランジの基準となるタワーセクション ID をスキャンするか、手動で入力します。この識別子は、特定のフランジに属する結果をグループ化するために使用されるため、結果レポートを生成するために必要です。ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
ある場合は タワーデータ QR コードをスキャンするか、手動で入力します。この文字列は、「タワーセクション ID」 と結果に追加されたいくつかの追加データを含む、セミコロンで区切られたリストです。ハンドコントローラーはこの文字列の形式を検証し、承認されない場合はエラーメッセージを生成します。
次の結果に含まれるオプションのジョブメタデータをスキャンします:
オペレーターデータをスキャン
オペレーター会社をスキャン
ボルトデータ
フランジ位置
オペレーターID
オペレーターデータ
オペレーター会社
[進む] ボタンを押して続行します。
ボルトのサブセットを作成する場合でも、フランジのボルトの総数を入力します。
上下ボタンを使用して数字を入力し、[Enter] ボタンを押して確定します。[次へ] ボタンを押して上下ボタンを使用して次の桁を入力し、[Enter] を押して選択を確定します。
ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
フランジのボルトの総数が正しく入力されたら、[進む] ボタンを押して概要画面に入ります。
概要画面には、実行するプログラムの名前とボルトの数が表示されます。
進むボタンを押してテンショニングを始動させます。
以前に開始したバッチジョブを再開すると、各テンショニングの結果が「ボルト上にツールを配置」画面に緑 (OK) または赤 (NG) で表示されます。
ボルト番号が正しくない場合は、[詳細] ボタンを使用して編集します。
ボルト番号が正しいことを確認するのはユーザーの責任となります。
[進む] ボタンを押してテンショニング操作を開始します。テンショニング操作のセクションを参照してください。
手動モード
手動モードでは、圧力目標の制御以外のプロセスはシステムによって監視されず、結果は記録されません。
プロセスを手動で監視できるように、コントローラーのGUIには圧力、トルク、角度に関する情報が表示されます。
システム起動後に初めて手動モードを実行する場合、オペレータは使用する目標圧力を入力して目標圧力の設定を行う必要があります。その後の手動モード実行では、システムに電力が供給されている限り、最後に使用した圧力目標が記憶されます。
目標圧力の設定 画面には、テンショニング手動モードの設定パラメータ「デフォルト手動の油圧」が表示されます。
目標圧力は、次のうち最も低い圧力によって制限されます。
ポンプの最大圧力
テンショナーの最大圧力
最大システム油圧 - 手動モード構成パラメータ
手動モードの操作
ホームビューで、[タスク] > [手動モード] に移動します。
目標圧力を設定します。
ボルト上にツールを配置が表示されたら、[追加情報] ボタンを押すと目標圧力を変更できます。
[進む] ボタンを押して手動モードを開始します。
加圧ボタンを押して加圧します。
目標圧力で加圧が止まるか、加圧ボタンを離すと加圧が停止します。
レンチにかかるトルクは、白いバーと数字の両方で視覚化されます。
記録された角度は数字で表示されます。
トルクが減少し始めると、ピークトルクは黒で表示され、現在のトルクは白いバーで表示されます。ピーク測定値は数字で表示されます。
[追加情報] ボタンを使用して次の操作を行います:
新しい圧力目標の設定 - ポップアップウィンドウで [目標圧力の設定] を選択します。
記録されたピークトルクと角度をクリアします。
レンチを反時計回りに動かすと、負のトルクと負の角度として記録されます。
手動モードを終了するには、[戻る] ボタンを使用します。
手動モードの終了は、システムから圧力が解放された場合にのみ可能です。
コントローラー GUI は [タスク] メニューに戻ります。
関連情報
本セクション内
ナットのテンショニング力を緩める
テンショナーをフランジの接触面から3 mmだけ戻します。
ハンドコントローラーで [手動モード] を選択し、最初にボルトにテンショニングをかけていた圧力を設定します。クリックレンチを正の力で反時計回りに押しながら圧力をかけ始めます。
加えられた負荷が限界に達すると、クリックレンチが自由に動いてナットが開きます。クリックレンチを、制限範囲サイクルで6-7回まわします。
圧力を解放し、ボルトが緩んでいることを確認します。


テンショナーに圧力をかけている間は、プーラーバーの最大ストロークインジケーターが表示されないようにする必要があります。表示されている場合は、ボルトのプーラーバーの位置を停止して調整し、必要な圧力に達するまで最大位置に到達しないようにします。最第位置に到達した場合、繰り返し行うと、テンショナーの内部コンポーネントが物理的に損傷する可能性があります。
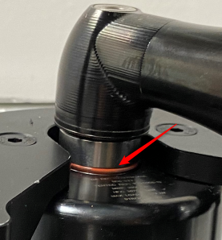
ボルトのサービス
ボルトのサービス プロセスでは、ナットとボルトの状態が良好であることを確認します。ナットをナット緩め最小緩め角度 (デフォルト値は10度) まで緩め、再び締めます。
締め付け方向の角度とトルクは正の値で表示され、緩める方向の角度とトルクは負の値で表示されます。
ホームビューで、[タスク] > [ボルトのサービス] に移動します。
上ボタンと下ボタンを使用してリスト内を移動して実行するプログラムを選択し、次に中央の [Enter] ボタンで選択を確定します。
リストに表示される名前は、[一般設定] > [プロパティ] タブの [名前] フィールドから取得されます。
画面に「ボルト上にツールを配置」というメッセージが表示されたら、テンショナーをボルトの真上に当てます。
ソケットとナットの位置が揃っていることを確認してください。
キーパッドの [進む] ボタンを押して、ボルトサービスの操作を開始します。
関連情報
本セクション内
ボルトのサービス作業
ボルトのサービス作業は次のフェーズで構成されます。
取り付け確認
加圧フェーズ
ナットを緩める
ナット締め付け
ボルトのサービス作業中、いつでも中止できます。
システムがユーザー操作を待機している間、数秒後にヘルプテキストが表示され、期待されるアクションが検出されるとすぐに表示されなくなります。
デルタナットの回転数の定義は、ナットの回転の合計です:緩める回転の数+締める回転の数。たとえば、緩め回転が-13度で、締め付け回転が15度の場合、ナットの総回転数は2になります。(−13 +15=2)
取り付け確認
取り付け確認の目的は、角度測定の基準点を作成することです。
取り付け確認中にテンショナーが回転しないように、加圧ボタンを押してください。
特に長い間使用のなかった後の最初の稼働では、圧力不足が起きる可能性があります。その場合は、もう一度加圧ボタンを押してください。
圧力がオーバーシュートする可能性があります - システムはユーザーに圧力を解放して再試行するように促します。
オーバーシュートは、「角度リセット力」のパラメータが原因で発生する可能性があります。「テンショニングパラメータ」の項を参照してください。
ナットを時計回りに回して、取り付け確認トルクのパラメータで設定されたトルクレベルを達成させます(デフォルト値は20 Nm)。少なくとも取り付け確認トルク継続時間 (デフォルト値は1秒)の間トルクを維持してください。
3 つの LED がすべて緑色に点灯します。
クリックレンチにかかる力を解放します。
ナットを反時計回りに回して、取り付け確認トルクのパラメータで設定されたトルクレベルを達成させます(デフォルト値は20 Nm)。少なくとも取り付け確認トルク継続時間 (デフォルト値は1秒)の間トルクを維持してください。
3 つの LED がすべて緑色に点灯します。
クリックレンチにかかる力を解放します。
加圧フェーズ
締め付けが終わるまで、加圧ボタンを押し続けます。
ナットはフランジに強い力で固定されているため、目標圧力に達する前にナットを回転させないでください。
ナットを緩める
加圧ボタンを押したままにすると、システムの圧力が最小ボルトテンショニング圧パラメータより高く保たれます。
圧力はゆっくりと低下し、システムは圧力が最小圧力を下回る前に加圧します。
ナットをナット緩め最小緩め角度まで緩めます。
腐食などの何らかの理由でナット動かなくなった場合、システムはナット緩め試行回数(デフォルト値は 3) 分の試行を許可し、再度ナットを締めるよう求めるプロンプトを表示します。これはNGの結果になります。
試行とは、ナット緩め試行カウントトルクよりも高いトルクを加えることと定義されます。
この条件が満たされると、角度横列の 3 つの LED がすべて点灯します。
緩め角度がナット緩め最小緩め角度より大きく、ナットの動きの合計が最小デルタナット回転数と最大デルタナット回転数の間の範囲内であれば、結果はOKです。
ナット締め付け
ナットを締め付け目標トルクまで締め、 トルクを締め付けトルクの継続時間(秒)の間保持します。
この条件が満たされると、すべての LED が点灯します。
クリックレンチにかかる力を解放します。
自動圧力リリースパラメータがオンの場合、システムはトルクが10 Nm未満に緩められると圧力を解放します。
自動圧力リリースパラメータがオフの場合は、[減圧ボタン] を押して圧力を解放します。
圧力が解放されると、OK または NG の結果がハンドコントローラーに表示されます。いずれの場合も、詳細ビューには記録された圧力/力の角度とトルクの測定値が表示されます。
緩め角度がナット緩め最小緩め角度より大きく、ナットの動きの合計が最小デルタナット回転数と最大デルタナット回転数の間の範囲内であれば、結果はOKです。
中止中
実行中のタスクはいつでも中止できますが、その前にシステム圧力を解放する必要があります。
[減圧ボタン] を押して圧力を解放します。
[戻る] ボタンを押してボルトのサービス操作を終了します。
バッチ ジョブ中にボルト サービス操作を中止する場合、ユーザーには次の 2 つの選択肢が与えられます:
ボルトをキャンセル:ボルト番号が間違っている場合に使用します。ハンドコントローラーのGUIは「ボルト上にツールを配置」の画面に戻ります。
バッチを中止する:テンショニングジョブを一時停止または停止する必要がある場合に使用します。
ボルトのサービスジョブを実行すると、ハンドコントローラー GUI はタスクメニューに戻ります。
バッチボルトのサービス
ホームビューで、[タスク] > [バッチボルトのサービス] に移動します。
上ボタンと下ボタンを使用してリスト内を移動して実行するプログラムを選択し、中央の [Enter] ボタンで選択を確定します。
リストに表示される名前は、[一般設定] > [プロパティ] タブの [名前] フィールドから取得されます。
必要に応じて、次の 2 つの選択肢から 1 つを選択します: タワーセクションIDまたはタワーデータ
フランジ識別子をスキャンします。
特定のフランジの基準となるタワーセクション ID をスキャンするか、手動で入力します。この識別子は、特定のフランジに属する結果をグループ化するために使用されるため、結果レポートを生成するために必要です。
ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
ある場合は タワーデータ QR コードをスキャンするか、手動で入力します。この文字列は、「タワーセクション ID」 と結果に追加されたいくつかの追加データを含む、セミコロンで区切られたリストです。ハンドコントローラーはこの文字列の形式を検証し、承認されない場合はエラーメッセージを生成します。
次の結果に含まれるオプションのジョブメタデータをスキャンします:
オペレーターデータをスキャン
オペレーター会社をスキャン
ボルトデータ
フランジ位置
オペレーターID
オペレーターデータ
オペレーター会社
[進む] ボタンを押して続行します。
ボルトのサブセットを作成する場合でも、フランジのボルトの総数を入力します。
ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
[進む] ボタンを押して概要画面に入ります。
概要画面には、実行するプログラムの名前とボルトの数が表示されます。
[進む] ボタンを押して、ボルトサービス作業を開始します。
以前に開始したバッチジョブを再開すると、各ボルトのサービスの結果が「ボルト上にツールを配置」画面に緑 (OK) または赤 (NG) で表示されます。
ボルト番号が正しくない場合は、[詳細] ボタンを使用して編集します。
ボルト番号が正しいことを確認するのはユーザーの責任となります。
[進む] ボタンを押してボルトのサービス作業を開始します。「ボルトのサービス」の「ボルトのサービス作業」のセクションを参照してください。
[レポート]タブの操作
レポートの生成
レポートは、ハンドコントローラーのUSB-Aコネクタに接続されたUSBフラッシュドライブに生成されます。
ホームビューで、[レポート] タブを選択し、[Enter] ボタンを押して[レポートの生成] を選択します。
レポートを生成する日付範囲を定義するには、ハンドコントローラーのキーパッドボタンを使用して [開始日] と [終了日] を編集します。これらのフィールドを空白のままにすると、レポートにはハンドコントローラーのすべての結果が含まれます。
[進む] ボタンを押し、[Enter] ボタンを押して生成を開始を選ぶか、[戻る] ボタンを押して中止します。
「レポートの生成を開始する前に、USBフラッシュドライブが接続されていることを確認してください。」という警告メッセージが表示されます 。
「レポートが生成されました 」というメッセージが画面に表示されたら、[次へ] ボタンを押します。
フラッシュドライブを取り外します。
結果
バッチサービスジョブの結果は [レポート] タブで表示できます。保存された結果は、すべてのバッチジョブの「タワーセクション ID」 ごとに表示できます。
フランジの完全な結果は、円として視覚化されます。
OK の結果は緑のセグメントです。
NGの結果は赤色のセグメント。
有効なセグメントは白となります。
欠落している結果は灰色になります。
[ レポート] タブで、[結果] を選択します。
結果の日付範囲を定義するには、ハンドコントローラーのキーパッドボタンを使用して [開始日] と [終了日] を編集します。これらのフィールドを空のままにすると、ハンドコントローラーのすべての結果を表示できます。
キーパッドの上下ボタンを押して結果間を移動します
[Enter] ボタンを押して表示する結果を選択します。
選択した結果の円形ビューが表示されます。各セグメントはバッチジョブ中の 1 つのボルトを表します。
キーパッドの上下ボタンを使用してボルトの結果間を移動し、次の結果または前の結果に移動します。
[追加情報] ボタンを使用して特定のボルト番号に移動し、ボルト番号を入力して [進む] ボタンを押します。
[次へ] ボタンをクリックすると、選択したボルトの詳細が表示されます。
コントローラー情報タブの操作
コントローラー情報メニューには、次の情報が表示されます。
ハンドコントローラー ユニットデータ - シリアル番号
製品番号
イーサネットアドレス
ソフトウェアバージョン
ソフトウェアのビルド日
[設定] タブの操作
ホームビューで、[設定]タブを選択して次を行います:
時間設定
日付設定
結果のクリア
言語
時間設定
上下ボタンを使用して時刻を 24 時間形式で設定し、[次へ] ボタンを押します。
ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
分フィールドが有効になったら、[進む] ボタンで時刻を確認します。
中止するには、時間フィールドが有効な状態で [戻る] ボタンを押します。
日付設定
上下ボタンを使用して日付をyyyy/mm/dd形式で設定し、[次へ] ボタンを押します。
ハンドコントローラーのキーパッドボタンの使用方法の詳細については、「GUI ボタンとアイコン」のセクションを参照してください。
日付フィールドが有効な場合は、[進む] ボタンで日付を確定します。
中止するには、「フィールド」年フィールドが有効なときに [戻る] ボタンを押します。
結果のクリア
ハンドコントローラーに保存されているすべての結果をクリアするには:
[設定] タブに移動し、[結果をクリア] を選択します。
[Enter] ボタンを押して確定し、ポップアップウィンドウで [はい] を選択するか、[いいえ] を選択して中止します。
問題を回避するために、バッチジョブとエクスポートが完了した後は、定期的に結果をクリアすることをお勧めします。ハンドコントローラーのディスク容量は無制限ではありません。
言語
言語設定を変更するには:
[設定] タブに移動し、[言語] を選択します。[Enter] ボタンを押して確定します。
言語メニューは常に [ホーム] -> [設定] のリストの最後に表示されるので、ハンドコントローラーがオペレーターの知らない言語に設定されている場合でも言語メニューに移動できます。
リストから目的の言語を選択します。[Enter] ボタンを押して確定します。
関連情報
接続されているデバイスの操作
ホームビューで、[接続されているデバイス]タブを選択すると、接続されているユニットのデータが表示されます。
メイン画面には、次の情報も表示されます。
ファームウェアのバージョン
テンショナーサイズ
プーラーバーカウント
プーラーバーの最大加圧回数
ポンプ
ホームビューで、[接続されているデバイス] タブに行きます。
[ポンプ] を選択し、[Enter] ボタンを押すと以下が表示されます:
ポンプの詳細
ポンプカスタム識別子
オイル交換 - 残りの稼働時間
詳細を確認するには、[Enter] ボタンを押してください。
ポンプの詳細
[ポンプの詳細] を選択すると、製品番号、シリアル番号、ハードウェアバージョン情報および次など、接続されているユニットに関する情報が表示されます:
ポンプモーターの稼働時間は、モーターが稼働している秒数をカウントします。
ポンプ増圧器の稼働時間は、増圧器が稼働している秒数をカウントします。
ポンプオイルの加圧回数は、最後に記録されたオイル交換時以降に最大圧力の 75%(=> 1400 bar)を超えた加圧回数をカウントします。
ポンプカスタム識別子
ポンプカスタム識別子は、お客様が任意のIDを使用してユニットを識別するために使用できるフィールドです。カスタムIDはポンプに保存され、システム起動時にハンドコントローラーによって読み取られます。
カスタムIDを編集するには、[Enter] ボタンを押して [ポンプカスタム識別子] 画面を選択します。
[追加情報] ボタンを押してスキャンするか、新しいカスタム ID を手動で入力します。
ポップアップウィンドウで [ スキャン] または [手動入力] を選択し、新しいカスタム ID を入力します。
手動入力の場合:
ポップアップウィンドウで [保存して終了] を選択するか、[ リセット] して [終了] を選択してこの手順をキャンセルします。
成功 (カスタム ID が設定されましたと表示される) を示すイベントが生成されます。
カスタム ID の文字は、値が 128 未満の ASCII 文字である必要があります。ASCII テーブルを参照してください。
新しいカスタム ID は、システムが次回起動するまで有効になりません。
オイル交換 - 残りの稼働時間
オイルとフィルターの交換が完了したら、[ポンプ] -> [オイル交換 - 残りの稼働時間] -> [オイルとフィルターの交換済み] -> [はい] を選択して交換を確認します。
次のオイル交換日は 1 年後に設定され、「ポンプモーターの稼働時間」は 0 にクリアされます。
新しい日付はポンプに転送されて保管され、次のオイルとフィルターの交換日はポンプに付随し、ポンプに接続されているハンドコントローラーに表示されます。
テンショナー
ホームビューで、[接続されているデバイス] タブに行きます。
[テンショナー] を選択し、[Enter] ボタンを押すと以下が表示されます:
テンショナー
プーラーバー
ロードセル
ピストン
テンショナーカスタム識別子
詳細を確認するには、[Enter] ボタンを押してください。
リストが画面より長い場合は、上下ボタンを使用してリスト全体を表示します。
テンショナー
ソケットサイズ
最高圧力
品番
名前 - このフィールドは製造環境で設定されます
改訂
シリアル番号
GUID
プーラーバー
プーラーバーは内部摩耗部品であり、定期的に交換する必要があります。
実際のプーラーバーカウントは、プーラーバーが加圧された回数を示します。これは、最大圧力(1400 bar)の 70% 以上となった場合の回数です。
最大プーラーバーカウントは、最大圧力(1400 bar)の 70% を超える最大許容加圧が加えられた回数を示します。
プーラーバーカウント残数
品番
シリアル番号
組立日
製造日
ロードセル
最高圧力
実際のロードセル数は 、最大圧の 75% を超える加圧回数(=> 1400バール)を示します。
品番
シリアル番号
組立日
製造日
ピストン
ピストンエリア
品番
シリアル番号
組立日
製造日
テンショナーカスタム識別子
テンショナーカスタム識別子は、お客様が任意のIDを使用してユニットを識別するために使用できるフィールドです。カスタムIDはテンショナーに保存され、システム起動時にハンドコントローラーによって読み取られます。
カスタムIDを編集するには、[Enter] ボタンを押して [テンショナーカスタム識別子] 画面を選択します。
[追加情報] ボタンを押してスキャンするか、新しいカスタム ID を手動で入力します。
ポップアップウィンドウで [スキャン] または [手動入力] を選択し、新しいカスタム ID を入力します。
手動入力の場合:
ポップアップウィンドウで [保存して終了] を選択するか、[ リセット] して [終了] を選択してこの手順をキャンセルします。
成功 (カスタム ID が設定されましたと表示される) または失敗を示すイベントが生成されます。
カスタム ID の文字は、値が 128 未満の ASCII 文字である必要があります。ASCII テーブルを参照してください。
新しいカスタム ID は、システムが次回起動するまで有効になりません。
本セクション内
プーラーバーの最大警告
プーラーバーカウンターが最大プーラーバーカウントに近づくと、テンショニングジョブの開始時にも表示される警告メッセージ、「プーラーバーカウント残数」が [接続されているデバイス] タブに表示されます。
テンショニングジョブの残数が500になると、次の警告メッセージが表示されます:「 プーラーバーカウント残数:500」この数値が 0 に近づくほど、警告メッセージがより頻繁に表示されるようになります。残りのテンショニングジョブの数が 0 の場合、それ以上テンショニングをかけることはできません。テンショナーを交換して作業を続行します。
コントローラー GUI で [接続されているデバイス] を選択し、次に [テンショナー] を選択し、[プーラーバー] をクリックすると、次の情報が表示されます。
実際のプーラーバーカウント
最大プーラーバーカウント
プーラーバーカウント残数
製品番号
シリアル番号
トラブルシューティングおよびサービス
このセクションでは、問題が発生した場合のトラブルシューティングを支援し、製品の保守とサービスに役立つ情報を提供します。
トラブルシューティングおよびアラーム
次の表は、さまざまな状況、問題、アラームと、それらに対応する、考えられる原因と解決策を示しています。アラームは、是正措置を取るためのコードを含むアラートをハンドコントローラーに表示します。
アラーム | 考えられる原因 | ソリューション |
|---|---|---|
ポンプモーター油温高アラーム | さまざまな理由により、ポンプ内の油温が許容温度を超えています。 連続作業 | ポンプをアイドル状態にして、数分間冷めるのを待ちます。 |
オイルの品質 | 汚染がないか確認します。 作動油を交換します。 | |
外部温度 | 作動油を適切なグレードのオイルを適切なグレードに交換してください。 | |
ポンプモーターオイルレベル低アラーム | ポンプ内のオイルレベルが最小レベルを下回ると、システムは停止します。 | ポンプにオイルを補充して作業を再開します。 |
システムの漏れ | システムに漏れがないか確認してから、修理または交換してください。 | |
ポンプモーター保護アラーム | モーター内部の大電流または電気系の異常な動作。このアラームは、モーターに接続された電子部品や電気部品の安全のためにトリガーされます。 | ポンプの前面の小さな窓を開けます。黒いつまみをIの位置に戻すと、モーターへの電力供給が再開されます。エラーが繰り返される場合は、主電源を確認してください。 |
ツール通信障害 | 過電流が長時間流れるのが最も一般的な兆候です。このアラームは、電気エンクロージャー内の電子機器および電気部品の安全のためにトリガーされます。 | ポンプの前面の小さな窓を開けます。ブレーカーを再び戻して作業を再開します。リワーク後数秒以内にブレーカーが落ち続ける場合は、作業を停止し、是正措置を講じてください。
|
短絡。 | ||
地絡。 | ||
ポンプ圧が検出されませんでした | モーターの故障 三相コネクタの相順が正しくない。 | システムの電源を切り、電源コネクタの位相を逆にします。 |
警告 | 考えられる原因 | ソリューション |
|---|---|---|
オイル交換 | オイル交換が必要です。 情報メッセージが表示されます:
警告メッセージが表示されます:
| 作動油を交換します。オイルが交換されたことを確認します。「オイル交換 - 残りの稼働時間」、ポンプ を参照してください。 |
過トルク | 締め付けの力が強すぎます。 | レンチにかける力を緩めます。 |
過圧 | 機械の損傷につながる可能性のある高すぎる圧力。 | 圧力を下げます。 |
問題 | 考えられる原因 | ソリューション |
|---|---|---|
テンショニング後、テンショナーがボルトから外れない | バッテリーナットランナーのバッテリー残量が少ない。 | ナットランナーのバッテリーを充電済みのバッテリーに交換します。 |
壁とテンショナーの間に隙間がない。 | テンショナーの背面と壁との間の隙間を確認してください。隙間がない場合は、手動モードを使用してボルトのテンショニング力を緩めます。 | |
穴の位置合わせ、潤滑、ボルトねじ山。 | 穴の位置合わせ、潤滑、ボルトのねじ山も確認してください。疑いがある場合は、ボルトを交換してもう一度やり直してください。 | |
テンショナーがボルトに着座しない。 | ボルトねじ山が破損している。 | ボルトを交換してください。 |
ボルトねじ山に潤滑剤が塗布されていない。 | ボルトねじ山に潤滑剤を塗布します。 | |
テンショナー内ねじ山に破片がある。 | ワイヤーブラシでネジ山の破片を取り除きます。 | |
ボルトの突出量が上限を超えている。 | ボルトを緩めて突出量を調整し、限界を超えないようにします。 | |
ポンプの圧力が200バールを超えるほどかかっていない | ポンプに漏れがある。 | ポンプまたはシステムの油圧ラインに漏れがないか確認してください。作動油レベルを確認します。オイルが少ない場合は補充してください。 問題が解決しない場合は、ポンプをメンテナンスまたは修理に出してください。 |
オイルのグレードが適切でありません。 | 適切なグレードのオイルを使用してください。 | |
油圧ラインカプラをポンプから取り外すのが難しい | ホースのニップルが磨耗している。 | ホースとテンショナーがべたついて外れにくくなったら直ちにニップルを交換してください。 |
参考
このセクションでは、さまざまな有用な情報を見つけることができます。
用語および定義
用語 | 同意語 | 定義 | 注記 |
|---|---|---|---|
バッチ | 同じテンショニングプログラムとソケットを使用した複数回のテンショニング | ||
コントローラー GUI | グラフィカルユーザーインターフェイス | システムの操作に使用されるハンドコントローラーのユーザーインターフェイス | |
イベント | ハンドコントローラーまたは接続されているデバイスからのステータス信号 | ||
最終角度 | テンショニングプロセスの終了時における実際の測定角度値 | ||
最終トルク | テンショニングプロセスの終了時における実際の測定トルク値 | ||
最終圧力 | テンショニングプロセスの終了時における実際の測定圧力値 | ||
GUI | グラフィカルユーザーインターフェイス | グラフィカルディスプレイ上のウィンドウ、アイコン、シンボルなどのインタラクティブなグラフィカル要素からなるユーザーインターフェース | |
IAM | インテリジェントアプリケーションモジュール(Intelligent Application Module) | 生産データを含むハンドコントローラーモジュール | |
テンショニングプログラム | パラメータセット | 単一テンショニングアクションを管理、監視し、テンショニング結果を保存するためのパラメータと値の構成 | 目標は圧力、トルク、または角度で表されます。 |
目標 | テンショニングの好ましい結果 | 目標はトルクか角度で表されます。 | |
目標角度 | 基準点から測定した、テンショニングプロセス測定終了時における好ましい角度値 | ||
目標トルク | テンショニングプロセスの終了時における好ましいトルク値 | ||
Web GUI | リモートコンピュータから Web ブラウザウィンドウを通したコントローラーのユーザーインターフェース | ||
仮想ステーション | 仮想コントローラー | 物理 コントローラーをソフトウェアで抽象化したもの | コントローラーは 1 つのテンショニングシステムにのみ含めることができます。 |
サードパーティライセンス
サードパーティーライセンスのリスト
Power Focus コントローラーにはサードパーティのコンポーネントが組み込まれており、当社は、これらサードパーティライセンスのライセンス言語や著作権表示を公開する必要があります。これらの要件に準拠して、ライセンスの写しを以下に示します。ライセンス文の写しを表示するには、以下のいずれかのライセンスをクリックしてください。
Software | Version | Licenses |
|---|---|---|
acl | 2.2.52 | |
alsa-lib | 1.1.2 | |
alsa-state | 0.2.0 | |
alsa-tools | 1.1.0 | |
alsa-utils | 1.1.2 | |
anybus | 1.1 |
|
atftp | 0.7.1 + gitAUTOINC + be3291a18c | |
attr | 2.4.47 | |
barebox | 2018.06.0 | |
base-files | 3.0.14 | |
base-files-px2-base | 1.0 | |
base-passwd | 3.5.29 | |
bash | 4.3.30 | |
bash-completion | 2.4 | |
bluez5 | 5.41 | |
boost | 1.61.0 | |
busybox-px2base | 1.24.1 | |
bzip2 | 1.0.6 | |
ca-certificates | 20160104 | |
cppunit | 1.13.1 | |
cryptodev-linux | 1.8 | |
curl | 7.50.1 | |
db | 3.0.35 | |
dbus | 1.10.10 | |
dhcp | 4.3.4 | |
dosfstools | 4.0 | |
dt-utils | 2017.03.0 | |
e2fsprogs | 1.43 | |
ecryptfs-tools | 1.0 | |
elfutils | 0.166 | |
eudev | 3.2.2 | |
expat | 2.2.0 | |
fbset | 2.1 | |
fb-test | 1.1.0 | |
fcgi | 2.4.0 | |
finit | 3.1 | |
firmware-imx | 5.4 |
|
flac | 1.3.1 | |
flatbuffers | 1.9.0 | |
fruit | 3.4.0 + gitAUTOINC + ece0f7218c | |
fuse | 2.9.4 | |
gcc-runtime | 6.2.0 | |
gdb | 8.0.1 | |
gdbm | 1.12 | |
glib-2.0 | 2.48.2 | |
glibc | 2.24 | |
gmp | 6.1.1 | |
gnutls | 3.5.3 | |
grep | 2.25 | |
gstreamer1.0 | 1.8.3 | |
gstreamer1.0-plugins-base | 1.8.3 | |
hostpad | 2.6 | |
htop | 1.0.3 | |
icu | 57.1 | |
init-ifupdown | 1.0 | |
initscripts | 1.0 | |
iproute2 | 4.7.0 | |
iptables | 1.6.0 | |
ipwatchd | 1.2 | |
iw | 4.7 | |
json-spirit | 4.08 | |
keyutils | 1.5.9 | |
kmod | 23 + gitAUTOINC + 65a885df5f | |
kmsfbwrap-px2base | 12.0 | |
libarchive | 3.2.2 | |
libbsd | 0.8.3 |
|
libcap | 2.25 | |
libdrm | 2.4.70 | |
libestr | 0.1.10 | |
libevent | 2.0.22 | |
libfastjson | 0.99.4 | |
libffi | 3.2.1 | |
libgcc | 6.2.0 | |
libgcrypt | 1.7.3 | |
libgpg-error | 1.24 | |
libidn | 1.33 | |
libite | 2.0.2 | |
libjpeg-turbo | 1.5.0 | |
liblogging | 1.0.5 | |
libnet | 1.2-rc3 | |
libnfsidmap | 0.25 | |
libnl | 3.2.28 | |
libogg | 1.3.2 | |
libpcap | 1.8.1 | |
libpcre | 8.39 | |
libpng | 1.6.24 | |
librcf | 2.2.0.0 | |
libsamplerate0 | 0.1.8 | |
libsndfile1 | 1.0.27 | |
libtinyxml | 2.6.2 | |
libtirpc | 1.0.1 | |
libuev | 2.2.0 | |
libusb1 | 1.0.20 | |
libvorbis | 1.3.5 | |
libxml2 | 2.9.4 | |
libxslt | 1.1.29 | |
lighttpd | 1.4.51 | |
linux-atlas | 4.14 | |
linux-libc-headers | 4.14.13 | |
logrotate | 3.9.1 | |
lua | 5.1.5 | |
luabind | git | |
lzo | 2.09 | |
lzop | 1.03 | |
memlog | 2.0 | |
mesa | 12.0.1 | |
mg | 20161005 |
|
minizip | 1.2.8 | |
mmc-utils | 0.1 | |
mtd-utils | 1.5.2 | |
nano | 2.2.5 | |
ncurses | 6.0 + 20160625 | |
netbase | 5.3 | |
netcat-openbsd | 1.105 | |
nettle | 3.2 | |
nfs-utils | 2.1.1 | |
ntp | 4.2.8p8 | |
openssh | 7.6p1 | |
openssl | 1.0.2n | |
opkg | 0.3.3 | |
opkg-arch-config | 1.0 | |
opkg-utils | 0.3.2 + gitAUTOINC + 3ffece9bf1 | |
orc | 0.4.25 | |
os-release | 1.0 | |
packagegroup-atlas-qt5 | 1.0 | |
packagegroup-atlas-sxb | 1.0 | |
packagegroup-base | 1.0 | |
packagegroup-core-boot | 1.0 | |
packagegroup-core-eclipse-debug | 1.0 | |
packagegroup-core-nfs | 1.0 | |
packagegroup-core-ssh-openssh | 1.0 | |
packagegroup-px2it | 1.0 | |
parted | 3.2 | |
perl | 5.22.1 | |
pm-utils | 1.4.1 | |
poco | 1.9.0 | |
pointercal | 0.0 | |
popt | 1.16 | |
procps | 3.3.12 | |
protobuf | 2.6.1 + gitAUTOINC + bba83652e1 | |
python | 2.7.12 | |
qtbase | 5.7.1 + gitAUTOINC + a55f36211e | |
qtdeclarative | 5.7.1 + gitAUTOINC + 2a992040e2 | |
qtlocation | 5.7.1 + gitAUTOINC + de5be121d8 | |
qtsensors | 5.7.1 + gitAUTOINC + 5a57beaaa5 | |
qtwebkit | 5.7.1 + gitAUTOINC + 76e2732f01 | |
qtwebsockets | 5.7.1 + gitAUTOINC + 60cede232a | |
qtxmlpatterns | 5.7.1 + gitAUTOINC + 89dbcc4f80 | |
rauc | 0.4 | |
readline | 6.3 | |
rpcbind | 0.2.3 | |
rsync | 3.1.2 | |
rsyslog | 8.22.0 | |
run-postinsts | 1.0 | |
shadow | 4.2.1 | |
shadow-security | 4.2.1 | |
sqlite3 | 3.14.1 |
|
squashfs-tools | 5.7.1 + gitrAUTOINC + 9c1db6d13a |
|
st-load | 1.0 |
|
stm32flash | git | |
strace | 4.13 | |
sysfsutils | 2.1.0 | |
sysvinit-bootlogd | 2.88dsf | |
tcf-agent | 1.4.0 + gitAUTOINC + 2dddd5f440 | |
tcpdump | 4.7.4 | |
tcp-wrappers | 7.6 | |
tslib | 1.1 | |
tzdata | 2016i |
|
u-boot-atlas | 2017.09 | |
u-boot-fw-utils | 2017.09 | |
unzip | 6.0 | |
usbutils | 008 | |
util-linux | 2.28.1 | |
wireless-tools | 30.pre9 | |
wpa-supplicant | 2.5 | |
xerces-c | 2.7.0 | |
xz | 5.2.2 |
|
yaml-cpp | 0.6.2 | |
zip | 3.0 | |
zlib | 1.2.8 |