4단계 조임 전략
4단계 조임 전략은 별도의 단계로 구분되고, 조임 작업을 사용자 정의할 수 있도록 켜짐 또는 꺼짐으로 전환할 수 있습니다.
적은 반응 조임 전략 및 컨트롤러 전반의 기능과 같은 컨트롤러 기능들은 기능 관리 시스템(FMS)을 통해 배포된 라이선스가 필요합니다. 특정 라이선스 없이 기능의 구성이 가능하지만, 이러한 기능들을 할당하고 사용하려면 올바른 라이선스를 컨트롤러에 설치해야 합니다. 라이선스에 대한 자세한 내용은 라이선스(FMS)를 참조하십시오.
각 단계에는 목표값이 있고 다른 값을 모니터링할 수 있으며 다음과 같이 구분됩니다.
단계 | 기능 |
|---|---|
시작 | 시작 단계는 스레드를 체결하고 조임이 이미 발생한 경우 감지하기 위해 사용됩니다. |
런다운 | 런다운 단계는 나사를 착좌점 레벨로 런다운할 때 사용됩니다. |
조임 | 조임 단계는 나사를 지정된 토크 레벨로 조이는 데 사용되고 7단계로 구분될 수 있습니다. 최종 목표값은 목표 토크 또는 목표 각도일 수 있습니다. |
중지 | 정지 단계는 인체공학적인 방식으로 조임을 종료합니다. |
사례 1: 시작 및 런다운 단계가 나사를 착촤점 레벨로 조이는 데 사용될 경우 최종 조임은 더 나중 단계에서 수행할 수 있습니다.
사례 2: 조임 전략이 이전 착촤점 레벨 조임에서 사용된 경우 조인트를 최종 목표값으로 조이기 위해 최종 조립을 수행할 수 있습니다.
매개변수 정의
다른 매개변수는 4단계 조임을 제어합니다. 매개변수와 위치를 분명히 보여 주기 위해 결합된 속도-오버- 타임 곡선, 각도-오버- 타임 곡선 및 토크-오버- 타임 곡선으로 표시됩니다.
그래픽 표시는 구성 설정을 설명하고 매개변수 값을 해석하기 위해 문서에서 사용되고 있습니다. 그래프는 모든 GUI에서 사용되지 않습니다.
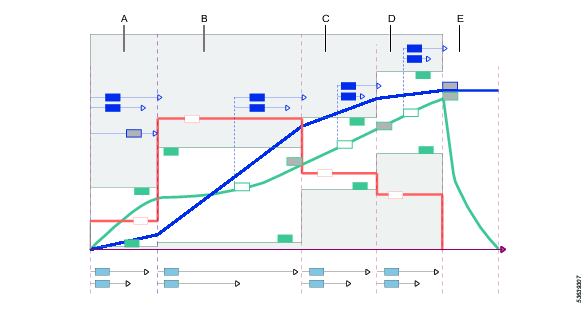
A | 시작 스테이지 |
B | 런다운 스테이지 |
C | 조임 스테이지: 최초 단계 |
D | 조임 스테이지: 최종 단계 |
E | 정지 스테이지 |









































