4단계 조임 매개변수 - 시작 단계
시작 단계 중에 시간, 토크 및 각도가 모니터링됩니다. 이 단계에는 목표로 각도가 있습니다.
그래픽 표시는 구성 설정을 설명하고 매개변수 값을 해석하기 위해 문서에서 사용되고 있습니다. 그래프는 모든 GUI에서 사용되지 않습니다.
이 단계는 지정된 목표 각도에 도달할 때까지 트리거를 누름으로써 지정됩니다.
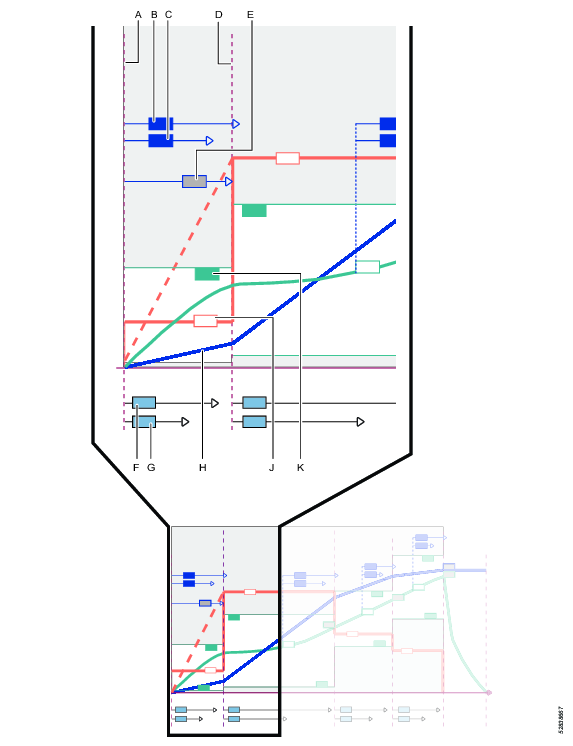
A | 트리거 눌렀음 |
B | 최대 각도(모니터링) |
C | 최소 각도(모니터링) |
D | 시작 단계의 끝 |
E | 시작 단계의 목표 각도 |
F | 최소 시간(모니터링) |
G | 최대 시간(모니터링) |
H | 각도 곡선 |
J | 속도 곡선 |
K | 최대 토크 값(모니터링) |
표에는 모든 사용 가능한 매개변수가 수록되어 있습니다. 일부 매개변수는 특정 기능이 활성화된 경우에만 사용 가능하고 볼 수 있습니다.
매개변수 | 설명 | 기본값 |
|---|---|---|
방향 | 조임의 회전 방향. CW: 시계방향 CCW: 반시계 방향 회전 | CW |
전류 모니터링 | 꺼짐: 전류 모니터링이 비활성화되고 토크 센서가 공구 토크를 측정합니다. 켜짐: 전류가 최종 토크 목표에서 측정되고 토크 값으로 변환됩니다. 계산된 토크는 조임이 측정된 토크와 비교됩니다. 차이가 10% 이내일 경우, 조임이 OK인 것으로 간주됩니다. | |
실제 각도 보상 | 켜짐 또는 꺼짐 위치로 바꿉니다. | 꺼짐 |
음 | 실제 각도 보상 = 켜짐일 경우에만 볼 수 있습니다. 공구의 최대 음의 회전을 지정합니다. 이 값이 초과될 경우 조임이 종료되고 오류가 보고됩니다. 이는 숫자 각도 값으로 표시됩니다. | 30 |
양 | 실제 각도 보상 = 켜짐일 경우에만 볼 수 있습니다. 공구의 최대 양의 회전을 지정합니다. 이 값이 초과될 경우 조임이 종료되고 오류가 보고됩니다. 이는 숫자 각도 값으로 표시됩니다. | 30 |
부착물 조정 가능 | 예 아니요 | 아니요 |
매개변수 | 설명 | 기본값 |
|---|---|---|
소프트 스타트 | 켜짐: 소프트 스타트는 저속에서 부드러운 작동 시작을 허용합니다. 스레드에 맞추는 데 사용됩니다. 꺼짐: 공구 속도는 가능한 한 빠르게 런다운 속도로 증가됩니다. | 켜짐 |
속도 | 소프트 스타트 중의 속도를 지정합니다. | 34 |
각도 | 단계의 목표 각도. 단계의 끝은 목표에 도달한 이 지점에서 지정됩니다. | 90 |
최소 각도 | 각도 값을 모니터링하고, 그 결과가 한계 내에 있음을 확인합니다. | 70 |
최대 각도 | 각도 값을 모니터링하고, 그 결과가 한계 내에 있음을 확인합니다. | 110 |
토크 최소 | 소프트 스타트 도중에 토크 하한을 지정합니다. 최소 토크가 한계 미만인 경우, 조임이 중단되고 오류 메시지가 발생합니다. 조임은 불량으로 간주됩니다. | 0.00 |
토크 최대 | 소프트 스타트 중에 토크 상한을 지정합니다. 최대 토크를 초과할 경우, 조임이 취소되고 오류 메시지가 발생합니다. 조임은 불량으로 간주됩니다. | 1.25 |
최소 시간 | 단계에 대한 최소 시간. 트리거를 눌러서 측정됩니다. 숫자 밀리초 값으로 표시됩니다. | 100.00 |
최대 시간 | 단계에 대한 최대 시간. 트리거를 눌러서 측정됩니다. 숫자 밀리초 값으로 표시됩니다. | 500.00 |
부착물 세부 조정 사용 | 예 아니요 | 아니요 |
기어비 | 첨부 파일 조정 사용이 예로 설정된 경우에만 표시됩니다. 최소/최대 값: 0.5/4.0 기어비는 각도와 토크를 보정하기 위해 필요합니다. 기어 비율은 공구의 최대 속도와 최대 토크에 영향을 줍니다. 매개 변수 첨부 파일 조정 사용 예/아니오 사이에서 전환할 때, 기어비의 값은 기본값으로 재설정되지 않습니다. | 1.00 |
효율성 조율 | 첨부 파일 조정 사용이 예로 설정된 경우에만 표시됩니다. 최소/최대 값: 0.5/1.0 첨부 파일의 효율성 손실을 설정합니다. 효율성 조율과 결합된 기어비는 토크를 보상할 때 필요합니다. 매개 변수 첨부 파일 조정 사용 예/아니오 사이에서 전환할 때, 효율성 조율값은 기본값으로 재설정되지 않습니다. | 1.00 |









































