4 ステップ締め付け戦略
4 ステップ締め付け戦略は、オンまたはオフに切り替えできる別個の段階に分けて、締め付けタスクをカスタマイズできます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
各ステップには目標値があり、他の値を監視する場合があり、次のように分けることができます。
ステップ | 機能 |
|---|---|
開始 | 開始ステップは、スレッドをかみ合わせ、締め付けがすでに行われているかを検出するために使用します。 |
ランダウン | ランダウンステップは、ネジを着座レベルにランダウンするために使用します。 |
締め付け | 締め付けステップは、定義されたトルクレベルまでネジを締め付けるために使用され、いくつかのステップに分ける場合があります。この最終ターゲット値は、ターゲットトルクまたはターゲット角度のいずれでも可能です。 |
停止 | 停止ステップは、人間工学に基づいた方法で、締め付けを確定するものです。 |
例 1: 開始ステップおよびランダウンステップを用いて、ネジを着座レベルまで締め付けると、最終締め付けを、後のステップで行うことができます。
例 2: 締め付けステップを前の着座レベルの締め付けで使用すると、最終アセンブリは、ジョイントを最終ターゲット値まで締め付けることができます。
パラメーターの定義
異なるパラメータで、4 つのステップの締め付けを制御します。パラメータおよびそれらの位置を例示するために、結合対時間速度曲線、対時間角度曲線、対時間トルク曲線で表示されます。
グラフィック表示は、構成設定とパラメーター値の解釈を説明する文書で使用します。グラフは、GUI では使用されません。
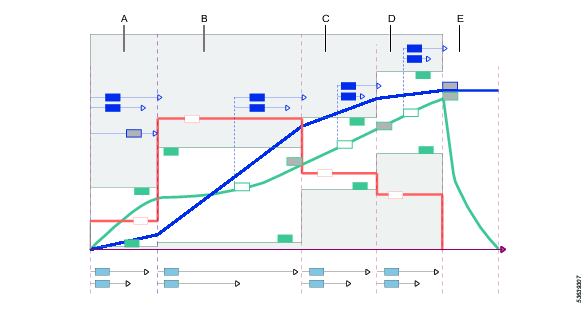
A | 開始段階 |
B | ランダウン段階 |
C | 締め付け段階:最初の段階 |
D | 締め付け段階:最終の段階 |
E | 停止段階 |









































