[イベントの構成]ページからイベントを構成できるかどうかをユーザーに通知します。
Power Focus XC (3.6)
Software
はじめに
このセクションでは、製品に関する基本的な情報と、トピックで使用されている書式設定規則について説明します。
規約
ユーザーの皆様にさらにご理解いただけるように、本文書全体で特定のフォーマッティング規約を使用しています。使用される書式規則を以下に示します。
要素 | 表記 | 説明 | 出力 |
|---|---|---|---|
一般的な強調 | プログラム ワークスペース内。 | 特定のテキスト要素を目立たせる、またはハイライト表示します。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) 項目 | 機能ボタンを選択します。 | GUI の画面上にある項目に関する記載 (コマンド ボタン、アイコン名、フィールド名など)。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) パス > | 一般に、GUI の上部にあります。 | GUI 内の場所を追跡するナビゲーション補助。 | 例:コントローラ > プログラム > 編集 |
ユーザー入力 | プログラムの説明を入力します。 | ユーザーが入力する任意のテキスト。 | 太字のテキスト |
ファイル名 | エクスポートするファイル名を入力します。 | システムからエクスポートまたはインポートされたファイル。 | 太字斜体のテキスト |
変数およびパラメーターの名前 | エクスポートの名前を入力します。 | 変数名とパラメーター名 (値ではありません)。 | 斜体のテキスト |
変数およびパラメーターの値 | エクスポートの値を入力します。 | 変数とパラメーターの値。 | 太字大文字のテキスト |
システム出力 | Client.Domain.Models.ExportImportConfiguration | システムによって出力される任意のテキスト。 | 等幅のテキスト |
外部リンク | 文書または対象のコンテンツに関連する情報がある外部サイトへのリンク。これには、次のようなものがあります:
| 外部サイトへの選択可能なテキスト | |
内部ドキュメントへのリンク |
ある場合、これらのリンクはテキストの下に表示されます。 | 内部コンテンツへの選択可能なテキスト |
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
責任と警告
責任
動作環境における多くの事象が締め付けプロセスに影響を与える可能性があり、結果の検証が必要となります。適用規格および/または規制に準拠して、当社は、ここで、締め付け結果に影響を与える可能性のある事象があった場合に、導入したトルクおよび回転方向を確認いただくよう要請します。このような事象の例として、以下のものがありますが、これらに限定されるものではありません。
ツーリングシステムの初めての設置
部品バッチ、ボルト、ネジバッチ、ツール、ソフトウェア、構成または環境の変更
空気接続または電気接続の変更
ライン人間工学、プロセス、品質手順または慣行の変更
オペレーターの変更
締め付けプロセスの結果に影響を与えるその他の変更
以下について確認する必要があります。
影響のある事象によりジョイントの条件が変更されていないこと。
初めての機器の設置、メンテナンスまたは修理後に完了していること。
少なくともシフト毎に一回、または他の適切な頻度に行うこと。
警告
ユーザーガイドについて
このユーザーガイドでは、Power Focus XCPower Focus XC のセットアップと構成の方法について説明します。
Power Focus XCPower Focus XC システムの操作または保守を行う方を対象としています。
改訂履歴
リリース番号 | 改訂日 | 改訂の説明 |
|---|---|---|
3.6 | Power Focus 6000 の構成ガイドの最初の公式リリースです。 |
前提条件
本ユーザーガイドは Power Focus XCPower Focus XC の詳細に興味がある方に役立ちます。
本ユーザーガイドに記載の技術的側面を完全に理解するために、次のことを推奨します。
締め付け技術に関する知識
Power Focus の以前のバージョンでの作業経験
システム概要
ソフトウェア構造
メニューの概要
The controller has several menus to perform the following:
configure tightenings and hardware accessories
perform tool maintenance
administer software
view reports.
The menus available differ between the full web GUI and the simplified mobile GUI.
Web GUI
締め付けタブ

締め付けタブは、個々の締め付けで利用可能なコントローラに保存された締め付けプログラムを一覧表示します。締め付け構成は、締め付けタブに記載されています。
バッチシーケンスタブ

バッチシーケンスタブでは、コントローラに保存されたバッチシーケンスをリスト表示します。
バッチシーケンスは、様々な組み合わせにおける 1 つ以上の反復締め付けプログラムです。バッチシーケンスが作成され、バッチシーケンスタブで構成されます。
ソースタブ

ソースタブでは、異なるハードウェアのデジタル入力を通して、例えば、締め付けプログラムやバッチシーケンスなどの締め付けプログラムの選択を管理する利用可能なオプションをリスト表示します。スキャナ構成はソースタブで行います。
ツールタブ

ツールタブは、コントローラに接続されたツールに関する情報を示します。このメニューは、コントローラに接続されているワイヤレスツールにも使用できます。ツールの整備や校正を行う際のツールレリファレンス製品は、ツールタブにあるデータの一部です。
仮想ステーションタブ

仮想ステーションタブは、仮想ステーションを構成します。
仮想ステーションは、コントローラシステムのソフトウェアを抽象化したものです。仮想ステーションタブで、異なるリソース、アクセサリ、ツール、およびタスクが仮想ステーションに割り当てられます。
コントローラタブ
コントローラタブは、ハードウェアおよびソフトウェアのコンポーネントをリスト表示しています。
コントローラに保存され、使用されるソフトウェアのバージョンがリスト表示されており、更新することができます。追加機能のライセンスマネージャが扱われます。また、コントローラへの設定のインポートまたはコントローラからの設定のエクスポートもできます。
構成タブ

アクセサリ構成のリストは、構成タブで示されます。
Accessories like tool accessories and socket selectors can be configured. デジタル I/O 信号は、ボタン、ランプ、スイッチ、コネクタにマッピングされます。
レポートタブ

レポートタブでは、締め付け結果とイベントがリスト表示されます。
設定タブ
設定タブはで、言語、PIN コード、ワイヤレスネットワーク、使用中のフィールドバス、などのコントローラ固有の設定をセットアップできます。
ライセンス割り当てタブ
ライセンス割り当てタブは、ライセンスとライセンス機能を仮想ステーションに割り当てるために使用します
ヘルプタブ

ヘルプタブには、コントローラに関する有用なヘルプセクションが含まれています。コントローラに接続されたコンピュータを介して、複数の言語でPDFファイルをダウンロードすることができます。
Mobil GUI
Task Tab

締め付けタブは、個々の締め付けで利用可能なコントローラに保存された締め付けプログラムを一覧表示します。締め付け構成は、締め付けタブに記載されています。
コントローラタブ
コントローラタブは、ハードウェアおよびソフトウェアのコンポーネントをリスト表示しています。
コントローラに保存され、使用されるソフトウェアのバージョンがリスト表示されており、更新することができます。追加機能のライセンスマネージャが扱われます。また、コントローラへの設定のインポートまたはコントローラからの設定のエクスポートもできます。
Results Tab

レポートタブでは、締め付け結果とイベントがリスト表示されます。
ヘルプタブ
ヘルプタブには、コントローラに関する有用なヘルプセクションが含まれています。コントローラに接続されたコンピュータを介して、複数の言語でPDFファイルをダウンロードすることができます。
操作および取り扱い
The Power Focus XCPower Focus XC is set up and configured by using a web GUI by browsing to the controller’s IP address on a connected PC. It is also possible to access the controller interface through a mobile GUI.
Web GUI
GUI Buttons and Icons
ボタン | タイトル | 説明 |
|---|---|---|
 | 追加 | 追加項目を追加します。 |
 | 削除 | Remove an item. |
| Ellipsis | アイテムの編集 ID |
 | 戻る | 前の表示に戻ります。 |
  | Scroll up Scroll down | 画面に対して長すぎるリスト内で移動します。 |
  | Maximize 最小限 | パラメーターでセクションを最大化または最小化します。 |
  | Back (to the start) (in a list) 戻る(リスト内) | Move back in pages of a list. |
  | Forward (to the end) (in a list) Forward (in a list) | Move forward in pages of a list. |
 | 閉じる | ウィンドウを閉じるには、タップします。 |
 | 注意 | パラメータが間違って構成されていることを示すサイン。 |
 | フィルタ | Tap to filter on items. |
 | 警告 | Sign leading to a warning about the risk of injury. |
 | ペアリング | Tap to pair a STB tool or a STwrench to the controller via WLAN or Bluetooth. |
 | Validate program | Tap to check if a program is valid. |
 | マニュアルのダウンロード | Tap to download a manual. |
 | ホームに戻る | ホーム画面に移動します。 |
 | 結果を表示 | ライブ結果画面に移動します。 |
Mobil GUI
GUI Buttons and Icons
ボタン | タイトル | 説明 |
|---|---|---|
| 追加 | 追加項目を追加します。 |
| 削除 | Remove an item. |
 | Ellipsis | アイテムの編集 ID |
| 戻る | 前の表示に戻ります。 |
| Maximize 最小限 | パラメーターでセクションを最大化または最小化します。 |
| Back (to start of list) Back (one page) | Move back in pages of a list. |
| Forward (to end of list) Forward (one page) | Move forward in pages of a list. |
| 閉じる | ウィンドウを閉じます。 |
| 注意 | パラメータが間違って構成されていることを示すサイン。 |
| マニュアルのダウンロード | Tap to download a manual. |
| ホーム | ホーム画面に移動します。 |
| Risultato | ライブ結果画面に移動します。 |
 | プロトコル接続 | See protocol status. |
クイックスタートガイド
To provide a better overview of the system, the following instruction touches upon the steps that are required to start using the system.
The instruction does not cover all system features, but focuses on the most basic.
Web GUI
Select the type of tool to use. The tightening strategies available, depend on the type of tool you select.
これは、例えば目標角度と目標トルクといった締め付けに関連するすべてのパラメータが含まれている締め付けプログラムを定義することで行います。ツールの主な目的は、締め付けを行うことです。
仮想ステーションを作成し、それにツールを割り当てます。仮想ステーションは、コントローラとツールの間のインターフェイスとして機能することで、いくつかのツールを単一の物理的コントローラに接続することができます。仮想ステーションは、1 つのツールのみがコントローラに接続されている場合でも必要です。
タスクを仮想ステーションに割り当てます。タスクは、締め付けプログラム、バッチシーケンス、または指定されたデジタル入力(例えば、バーコードスキャナーから)のいずれかが可能です。ここで、ステーションに割り当てられたツールは、タスクを実行することができるようになります。
Mobil GUI
Select the type of tool to use.
Create a tightening Task and set the relevant parameters, for example target torque and target angle. ツールの主な目的は、締め付けを行うことです。
The created task will be assigned to a virtual station. ここで、ステーションに割り当てられたツールは、タスクを実行することができるようになります。
ライセンスの導入
コントローラ機能のライセンスは、機能管理システム(FMS)を通じて管理されます。これにより、お客様は動的ライセンス方式を介して、コントローラ機能を特定のニーズに合わせて調整できます。
ライセンスは、個々の機能または機能の集合に対して取得することができ、複数の仮想ステーションに展開することができます。ライセンスは不要になったときにプールに戻すことができます。ライセンスは、アトラスコプコ ライセンスポータル(ACLP)を通じて入手できます。ライセンスは、ACLP からダウンロードし、ToolsTalk を通じて管理または配布できます。また、FMS ポータブル (USB ドライブ) に保存してコントローラに挿入することもできます。
なお、ACLP における顧客アカウントの作成と管理について、このマニュアルでは扱っていません。詳細については、アトラスコプコの代理店にお問い合わせください。
ライセンスの概要
ライセンスによって管理される機能の設定は、ライセンスがインストールされていなくても実行できます。例えば、締め付けプログラムの構成とマルチステッププログラムの構成など。これらの機能をツールまたは仮想ステーションに割り当てることも可能です。ただし、有効なライセンスなしで機能を実行するには、適切なライセンスをインストールする必要があります。
ライセンスの適用は2つの段階、割り当てとランタイム(トリガー押下)で実行されます。ライセンスがインストールされていない機能が仮想ステーションに割り当てられている場合、ToolsTalk 2の仮想ステーションビューで赤い感嘆符が表示されます。コントローラ GUI には、ツールまたはタスク セクションに警告三角形も表示されます (不足しているものによって異なります)。ライセンスがインストールされていない機能が開始された場合(つまり、トリガが押された場合)、ユーザーにどのライセンスが不足しているかを通知するイベントが表示されます。正しいライセンスがインストールされていない場合、続行することはできません。
ライセンスされていない機能を実行すると、ほとんどの場合、ツールがロックされます。
コントローラ内の多くの機能は、仮想ステーションで割り当て、使用するためのライセンスが必要です。ライセンスには3種類あります。
バーチャルステーションタイプ
1つのパッケージにまとめられた一定の機能群。バーチャルステーションタイプは、実行可能なツール、使用可能なプログラムとシーケンスの数、使用可能な締め付け戦略、実行可能なレポートの種類など、その他多数を決定します。各バーチャルステーションタイプに含まれる機能は、通常お互いに併用される機能、またはパッケージに他の機能が必要な内部依存性を持つ機能です。バーチャルステーションタイプは、バーチャルステーションに完全に割り当てられます。バーチャルステーションはバーチャルステーションタイプに含まれるすべての機能を活用することができます。締め付けを行うためには、バーチャルステーションにバーチャルステーションタイプライセンスを割り当てる必要があります。ライセンスの種類によって、さまざまな締め付けオプションが有効またはブロックされます。
バーチャルステーション機能
バーチャルステーションタイプを補完する個々の機能。単一のライセンスとして多くの機能を購入することができます。
ライセンスソース
コントローラで使用されるライセンスは、複数の異なるソースから取得できます。同時ソースの数は10に制限されています(10のFMSポータブルソース、または9つのFMSポータブルソースに加えて1つのライセンスサーバー(TT2))。ソースの制限(10)に達したときにソースからライセンスを追加する場合は、一方のソースからのすべてのライセンスをコントローラから削除して、もう一方のソースからのライセンス用のスペースを確保する必要があります。
ソースの概要
[ソースの概要] タブ (ライセンスの割り当て > ソースの概要) は、コントローラーにインストールされているライセンスの概要と、そのライセンスがインストールされた場所をユーザーに提供します。最大10個の異なるソースをここに表示することができ、それぞれがFMS P(FMS Portable、またはドングル用)、またはライセンスサーバー(TT2)で指定されます。
任意のライセンスソースをクリックすると、そのソースの詳細なライセンスソース情報が表示されます。ソース名と種類、および各カテゴリのライセンスの数と種類 (仮想ステーションの種類、仮想ステーション機能、およびコントローラ機能) が一覧表示されます。
サポートされているツール
仮想ステーションでサポートされるツールは、コントローラーの仮想ステーションのタイプによって異なる場合があります。
サポートされているツール | BatchControl | JointControl | StationControl | CriticalControl | ProcessControl |
|---|---|---|---|---|---|
BCP / BCV | X | - | - | - | - |
TensorSB | - | X | X | - | - |
TensorSL | - | - | X | X | X |
TBP | - | - | X | X | X |
TensorST | - | - | X | X | X |
TensorSTR | - | - | X | X | X |
SRB | - | - | X | X | X |
TensorSTB | - | - | X | X | X |
STWrench | - | - | X | X | X |
TensorES | - | X | X | - | - |
TensorSR | - | - | X | X | X |
QST(固定スピンドル) | - | - | X | X | X |
TBPS | - | X | X | - | - |
MWR-S(メカトロニックレンチ信号) | - | - | - | - | - |
MWR-T(メカトロニックレンチトルク) | X | X | X | X | - |
MWR-TA(メカトロニックレンチ トルク角) | - | - | X | X | X |
外部ツール | X | X | X | X | X |
インストールとアップグレード
このセクションでは、製品の初期インストールや、バージョンを別のバージョンにアップグレードする際に役立つ情報を見つけることができます。
本セクション内
ライセンスのインストール
コントローラへのライセンスのインストール
ライセンスソースは1つのライセンスサーバー(TT2)と9つのFMSポータブル(ドングル)に同時に制限されることにご注意ください。ライセンスは、サーバー (ToolsTalk 2) またはFMSポータブル経由でインストールされます。ライセンス ソースの制限に達した場合、別のソースからのライセンスを追加するために、1つのソースからのすべてのライセンスをコントローラから削除する必要があります。
サーバー(ToolsTalk 2)を介してライセンスをインストールする前に、コントローラの時刻がサーバーの時刻と同期していることを確認してください。
サーバーからのインストール
サーバーベースのライセンスの配布は、ToolsTalk 2を使用して行います。ライセンスのインストール手順については、ToolsTalk 2のユーザーガイドを参照してください。
ToolsTalk 2を使用してライセンスをインストールするには、正しいライセンスサーバーを構成する必要があります。
[設定] メニューをクリックして、[サーバー接続] タブをクリックします。
アトラスコプコ ライセンスマネージャーフィールドで、スイッチを[オン]に設定します。
正しいサーバーホストIPアドレス(通常はToolsTalk 2のIPアドレスと同じもの)とサーバーポートを挿入します。
適用を選択します。
FMSポータブル(USB)からのインストール
機能管理システム(FMS)は、特殊なFMSポータブルデバイスを使用して、コントローラとの間で機能を転送します。USBフラッシュドライブには、汎用メモリ領域とコントローラ内のライセンスマネージャのみがアクセスできる信頼できる記憶領域の両方が含まれています。購入した機能項目は、アトラスコプコから汎用領域にダウンロードされます。ライセンスマネージャーを使用してコントローラに FMS ポータブルを初めて挿入すると、ファイルが検出されてデコードされ、機能アイテムはライセンスマネージャからのみアクセス可能な信頼できるストレージ領域に転送されます。
ライセンスがインストールされているUSBドライブがある場合は、以下の手順を実行してライセンスをコントローラにインストールします。
USBをコントローラのUSBポートに挿入します
USBライセンス管理ウィンドウがGUIでポップアップ表示されます。[プール] 列には、すべてのソースからのコントローラのライセンス数の合計が表示されます。[FMS Pで使用可能]列には、このドングルで使用可能なライセンスが表示され、他方、[このFMS Pから]列には、この特定の FMS P からこのコントローラに移動されたライセンスの数が表示されます。
コントローラから、インストールするライセンスの横にある左向きの矢印を選択します。
[FMS Pで使用可能]列の数値が1つ分減少し、[このFMS Pから]列の数値が1つ分増加します。
ライセンス転送の開始と終了の両方のイベントがユーザーに対してコントローラ上に表示されます。
Automatic License Assignment
A process control license is assigned automatically to the first created virtual station. The license is assigned if it is available on the controller and no other license is assigned to the virtual station. The automatic license assignment occurs during upstart of the controller.
ライセンス同期
既存のライセンスは、2時間ごとにライセンスサーバーに対して照合されます。14日間ライセンスサーバーからの応答が取得できない場合、対応するライセンスは取り消されます。ライセンスの有効期限が近づくと、ユーザーにも警告が表示されます。ライセンスの有効期限の7日前になると、2時間に1回警告が表示されます。ライセンスが更新されないとライセンスは失効し、対応する機能はもはや利用できなくなります。
コントローラからのライセンスの削除
FMSポータブルインストールライセンスを削除する1つの方法が説明されています。サーバーインストールライセンスを削除する方法については、 ToolsTalk 2ユーザーガイドを参照してください。
FMS ポータブルがインストールしたライセンスの削除
FMS ポータブルがコントローラの USB ポートに挿入されていることを確認します。
[USBライセンスマネージャーウィンドウが表示されない場合]ライセンス割り当てメニューを選択します。
ウインドウの右上にあるUSBアイコンを選択します。
USBライセンスマネージャーウィンドウがポップアップします。
コントローラから、インストールするライセンスの横にある左向きの矢印を選択します。

仮想ステーションに割り当てられているライセンスは、コントローラから削除できます。ただし、その結果として仮想ステーションは使用できなくなります。
設定
このセクションでは、製品設定を作成、変更、および確認する方法の詳細について説明します。
Web GUI
[締め付け]タブの使用
セクションにかかわらず締め付けプログラムを変更するには、GUIの右下隅にある[適用]ボタンをクリックして、適用を確定する必要があります。または、同じ場所にある[元に戻す]ボタンをクリックすると、元に戻すことができます。
変更したセクションから(戻る、ホーム、または結果ボタンを使用して)出る場合、変更を適用または元に戻すことができる警告ポップアップが表示されます。ユーザーは変更を適用または元に戻すことなく、先に進めることはできません。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
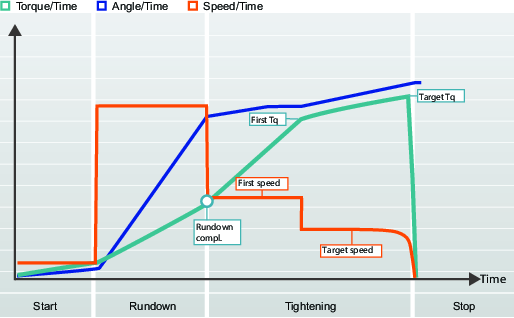
Power Focus XCPower Focus XC 締め付けプログラムでは、締め付けを行うためにパラメータを設定する必要があります。戦略と、目標トルクまたは目標角度のどちらかの選択は必須です。他の設定は、ソフトスタート、Selftap、およびトルク補正のようにオプションです。さらに、トルク、ナットの回転角度が維持しなければならない範囲を加えることで、実行中の締め付けを監視することも可能です。
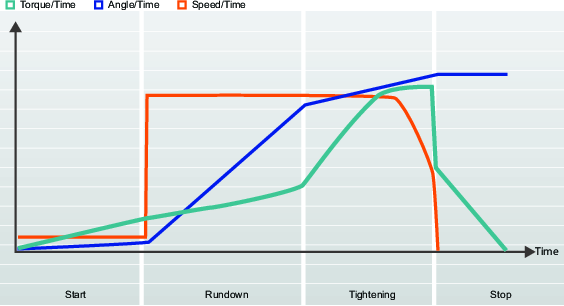
締め付け手順は次の 4 つのステップに分かれます。[開始]、[ランダウン]、[締め付け]、[停止]。
締め付けプログラム
締め付けプログラムを選択すると、ジョイントへのクランプ力(またはプレロード)をかける方法が選択できます。異なるジョイントでは、必要なクランプ力をかけ、不要なサービス中の影響を最小限に抑える方法について異なる戦略が必要です。
In the Web HMI, a maximum of 1,000 tightening programs can be created.
In the Mobile HMI, a maximum of 500 tightening programs can be created.
TurboTight 戦略により、手動プログラミングやクイックプログラミングを使用するオプションが可能になります。詳細情報についてはTurboTightの段落を参照してください。
クイックステップ、2ステップ、3ステップの戦略により、ターゲットトルクかターゲット角度の値に向けて締め付けの選択が可能になります。
外部結果戦略は、OK締め付けが外部デジタル信号によって示される場合に使用されます。詳細については、「外部結果」の段落を参照してください。
すべての締め付けプログラムで、少なくともターゲットトルクまたはターゲット角度の値を設定することが必要です。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
戦略 | 使用可能な締め付けプログラム TurboTight: 追加の締め付け挙動はデフォルトとして使用されません。ターゲット値のみ使用されます。 クイックステップ: 最初の締め付け段階を追加して、プリロード散乱を低減します。 2 ステップ: さらに短期的な緩和効果に対処するために、最初と最終の締め付けステップ間にポーズを追加します。 3 ステップ: 定義済みの第 1 トルク値まで締め付け、次にネジを緩めてすぐに目標トルクまたは目標角度に締め直します。 レンチ - 生産: STwrenchで使用する締め付け戦略。 レンチ - 品質: STwrenchによる締め付けの品質テストで使用する戦略。 回転: 指定した速度と角度でスピンドルを回転します。 外部結果:測定されたトルク / 角度の代わりに、所定の締め付け結果を示します。 マルチステップ: 制限とモニターを使用する、複数の構成可能なステップで構成される締め付け戦略です。 | TurboTight |
ターゲットの種類 | 最終ステップのターゲット値の種類を定義します。 ターゲットトルク:最終ステップを実行するときの締め付けは、指定されたターゲット値を目指します。 ターゲット角度:最終ステップを実行するときの締め付けは、指定されたターゲット値を目指します。 |
|
目標トルク | 最終ステップの締め付けの目標トルクを定義します。 |
|
目標角度 | 締め付けまたは最終ステップのターゲット角度を定義します。 |
|
ターゲット速度 | 手動での最終ステップのツール速度設定またはデフォルト速度の使用を有効にします。 自動:ツール最大速度に基づいて計算する値を使用します。 手動:ツール速度を手動で指定します。 | 自動 |
<Manual> | 締め付け時または最終ステップ中のツール速度。 |
|
TurboTight
TurboTight はデフォルト締め付け戦略であり、ツールの最高速度(ツール最高速度)に基づいて非常に高速かつ人間工学的な締め付けを実施するよう設計されています。この戦略には、2 つのオプションがあります。
クイックプログラムでは、締め付けを実施するために、目標トルクのみ設定が必要です。
手動では、ユーザーが複数の締め付けパラメータを設定することができます。
TurboTight 締め付け戦略を使用する際に締め付け終了時における予期しない飛び出しのリスクを最小化するために、[時間] 監視を有効にしてください。
TurboTight 締め付け戦略を使用する際の締め付け終了時における予期しないジャークのリスクを最小限に抑えるために、[最大時間制限] を確実に設定してください。
時間制限は既定で有効になっていますが、関連する値を設定する必要があります。締め付け段階で、[角度制限]を[完了ランダウンから]に設定します。
通常の締め付けを停止させることなく、 最長時間をできるだけ低い値に設定します。ランダウン段階で、 ランダウン完了トルクを設定して、トルクが増加し始めたときにトリガされるようにします。
ジョイントの特性に応じて、例えば、ジョイントが非常に硬いか非常に柔らかい場合、TurboTight と異なる締め付け戦略が必要になることがあります。
TurboTight は、ジョイントコントロールでは使用できません。
TurboTight 戦略の微調整
TurboTight締め付け戦略は目標トルクを指し、結果は目標を下回るか上回るかのいずれかになります。TurboTight締め付け戦略で最も重要なパラメーターは速度です。ほとんどの締め付けで最大速度を維持することは可能ですが、すべてまたは一部の締め付けがオーバーシュートした場合は、速度を小刻みに下げます。ランダウン完了トルクは、締め付けの制御には使用されません。制限と結果の計算にのみ使用されます。
クイックステップ
クイックステップは、所定のトルクと速度で最初のステップを追加し、次に最終ステップのターゲット速度を低下させることでジョイントのプレロード散乱を低減させるために使用する締め付け戦略です。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
最初のトルク | 最初のステップのターゲットトルク |
|
最初のトルク | 最初のステップ時のトルク | ターゲットトルクの 80% |
最初の速度 | 最初のステップのターゲット速度 |
|
最初の速度 | 最初のステップ時のツール速度 | ツール最高速度の 50% |
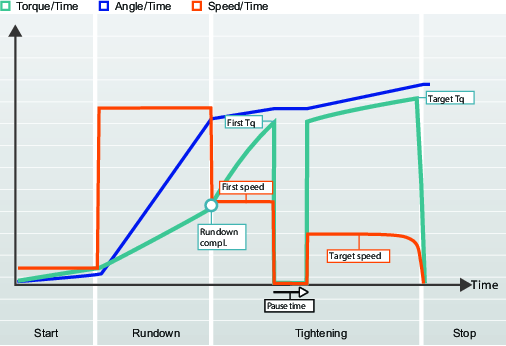
2 ステップ
2 ステップ戦略は、ジョイントの短期的緩和効果にさらに対処するよう最初のステップと最後のステップの間に小さな遅延時間を追加したこと以外で、クイックステップの戦略と非常に似ています。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
最初のトルク | 最初のステップ時のトルク | ターゲットトルクの 80% |
最初の速度 | 最初のステップのターゲット速度 |
|
一時停止時間 | 最初のステップと第 2 ステップの間の時間 | 50 ms |
2ステップ戦略の微調整
最初のターゲットに達すると、ツールは、最終ステップを続行する前に指定された時間の間即時停止します。最初のトルク値と一時停止時間は、手持ちツールの人間工学を改善するよう選択してください。
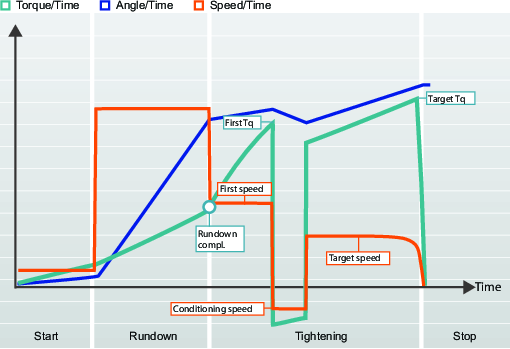
3 ステップ
3 ステップ戦略では、最初のステップと最終ステップの間に緩めステップを追加して、根入れによる短期的な緩和効果に対処し、プレロード散乱を減少させます。これは、ジョイントの調整と呼ばれることがあります。これは、例えば、多くの隣接面のあるジョイントで有用であり、根入れが少なくなる表面の平滑化のために再利用したパーツよりも新しいパーツに大きな影響を与えることになります。
ジョイントの調整は、最初のステップを所定トルク最初のトルクまで締め付け、次に、ナットを指定調整角だけ回転させて荷重を解放し、ナットをその目標トルクまたは目標角度まで再度締め付けて行います。
ターゲットトルクは、ランダウン後の最初のステップ時に達するトルクよりも低くすることができます。ターゲットトルクを最初のトルクよりも低くなるようにするには、ターゲットトルク(締め付けパラメータ > 締め付けステップ > 最終ステップ > ターゲットトルク)を最初のトルク(締め付けパラメーター > 締め付けステップ > 最初のステップ > 最初のトルク)よりも小さな値に設定します 。
角度を締め付けプログラムでターゲットとして使用する場合、ターゲット角度は、緩め段階(コンディショニング)の終了時の位置から測定します。
測定トルクおよび測定角度の動作
測定トルクと測定角度の結果評価で測定した最大トルク値とピークトルクの値は、それぞれ締め付け全体で測定された最高値を表します。つまり、ターゲットトルクが最初のトルクよりも低く設定されると、結果評価値が終了値よりも高くなります。締め付けの最終値を表示するには、測定トルクと測定角度の両方を、シャットオフ時の値に設定しなければなりません。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
最初のトルク | 最初のステップ時のトルク | ターゲットトルクの 80% |
最初の速度 | 最初のステップ時のツール速度 | ツール最高速度の 50% |
調整速度 | 調整ステップ時のツール速度 | ツール最高速度の 50% |
調整角度 | 調整ステップ時のソケットの回転角 | 180° |
3ステップ戦略の微調整
最初のターゲットに達し、調整ステップを入ると、ツールが即時停止し、最終ステップを続行する前に反転します。この調整ステップは、場合により手持ちツールの人間工学を改善するよう微調整する必要があります。
STwrench
STwrenchは、無線接続を使用して、コントローラに接続され、コントローラ GUI または Web GUI から構成します。
STwrenchは、他の締め付け戦略と同じように締め付けメニューの下で構成します。
STwrenchには、高速バックアップユニット(RBU)があります。RBU は、レンチの機能を定義し、締め付けプログラムを保存します。コントローラは、現在、生産タイプの RBU のみサポートしています。
STwrenchのエンドフィッティングツール (ソケット) には、プログラム可能な番号の RFID TAGが含まれています。このレンチは、この番号を使用して、ツールと、どのプログラムが使用できるかを自動的に認識します。RFID TAGは、トルクと角度補正係数も保存します。
STwrenchには、生産締め付けと品質管理の両方で複数のプログラムがあります。
STwrench は、ツールでサポートされている締め付けプログラム(レンチ生産およびレンチ品質)のみをサポートできます。
STwrench の詳細については、STwrenchユーザーガイド(印刷物番号9836 4134 01)を参照してください。
STwrench 開始ステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター  が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
タグ番号 | オン :TAG チェックスイッチを有効にした後([構成]> [ツール構成]> [TAG チェック]> [オン] )、締め付けプログラムを実行するには正しいTAG番号が必要です。 オフ: タグ番号はチェックされません。 | オフ | |
必要なタグ番号 | タグ番号 = オン | この締め付けプログラムで必要なタグ番号。 | 1 |
リヒット検出 | パラメーターのオプションは次のとおりです。 完了またはオフ。 | オフ | |
トルク補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数の計算の詳細については、STWrench ユーザーガイド (印刷物番号 9836 4134 01) を参照してください。 パラメーターは、エンドフィッティングツールの RFID タグに保存されます。 | 1.0 | |
角度補正 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、ST レンチユーザーガイドを参照してください。 パラメーターは、エンドフィッティングツールの RFID タグに保存されます。 | 0° |
STwrench ランダウンステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
ランダウン完了は、締め付けステップが開始する時点であるサイクル開始として定義される ST レンチ文書にあります。
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
ランダウン完了トルク | ランダウン完了点の定義 | スマートヘッド最小ロード(通常、公称トルクの 5%)により変わります |
ラチェット時間 | 5000 ms |
ST レンチ締め付けステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット | ターゲットをドロップダウンメニューから選択します。 トルク 、 角度 、 トルクまたは角度 。 | トルク | |
目標トルク |
| 締め付けステップに対するターゲットトルクを定義します。 | 0 Nm |
目標角度 | 目標 = 角度 | 締め付けステップに対する目標角度を定義します。 | 360° |
トルク限度 | 目標 = トルク | スイッチによる選択。 自動または手動位置。 |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値 | 0 Nm |
最大トルク | トルク制限 = 手動 | 上限のトルク値 | 0 Nm |
角度限界 | 目標 = 角度 | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 自動または手動。 最大と最小の角度値が可能であり、選択できます | |
角度限界 | 目標 = トルク | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルクに達した時から設定します。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 | |
最後の角度監視トルク |
| 角度制限が監視される時点からのトルク値 | 18.75 Nm |
最小角度 | 角度制限 = オンまたは手動で | 角度値下限 | 324° |
最大角度 | 角度制限 = オンまたは手動で | 角度値上限 | 396° |
角度検索制限 | 角度制限 = 手動で | ||
トルク測定点 |
| ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 最大トルク値 ピーク角度時の値 |
|
最終的に目標を下回るNG |
| スイッチによる選択。 オンまたはオフ位置。 | オフ |
ボルト制限を変更します |
| 50 Nm |
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
トルク補正点 | トルク補正 = オン | 0° | |
PCT 距離 | トルク補正 = オン | 360° | |
PVT 間隔 | トルク補正 = オン | 180° | |
遅延監視 | トルク補正 = オン | 0° | |
最小トルク | トルク補正 = オン | 下限のトルク値 | 1 Nm |
最大トルク | トルク補正 = オン | 上限のトルク値 | 20 Nm |
補正値 | トルク補正 = オン | ドロップダウンメニューから選択します。パラメーターのオプションは次のとおりです。 平均トルク ピークトルク |
STレンチ緩み
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
緩め制限 | このパラメーターが0を上回る値に設定されている場合、Power Focusは、締め付け中にこの値を超える負のトルクが適用されているかどうかを確認します。その場合、締め付けの全体的なステータスは「不合格(NG)」とマークされます。この機能は、レンチがサイクル開始に達したときに開始されます(締め付けを開始する前に、緩めが可能で、結果は生成されません)。この機能は、締め付け終了時の不要な緩めを検出するために使用します (たとえば、レンチがジョイントから外された場合など)。 | 0 Nm |
ST レンチ停止ステップパラメーター
テーブルで示すパラメーターは、ST レンチ戦略の 1 つが使用される場合に使用できます。複数の戦略の組み合わせがあります。パラメーターの一部は、特定の戦略に対してのみ利用可能であり、他の戦略では表示されないことがあります。
パラメーターのルールは自動的にチェックされます。違反が発生した場合、エラーインジケーター が、不正なパラメーターの横に表示されます。エラーインジケーターを選択すると、エラーの詳細情報が表示されます。
戦略間の切り替えにより、エラーインジケータが表示されることがあります。これは、選択された組み合わせが無効であることを示しており、修正する必要があります。
STwrench の詳細については、STレンチユーザーガイド(印刷物番号9836 4134 01)を参照してください。
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
終了サイクル時間 | トルクがサイクル開始を下回り、STレンチLEDで設定された3番目のパーセンテージ値に達した場合に適用されます。 | 100 ms |
パルスツール戦略
コントローラーソフトウェアのバージョンが締め付けプログラムをサポートする場合、戦略を選択することができます。パルス化ツールは、通常の回転ツールに比べて高いトルクを得ることができます。
パルス締め付けプログラム
開始
開始ステップの間に、ツールは、パルスなしの高速モードで回転します。
パラメーター名 | 説明 |
|---|---|
ソフトスタート | ボルトがネジに入るのを容易にするために、ツールの速度、角度、最大トルクの設定ができます。 ラジオボタンで選択されます。 オフ: ソフトスタートがオフになります。 オン: ソフトスタートがオンになります。 |
Speed (速度) | ソフトスタート時の速度を定義します。 |
Time (時間) | ソフトスタート期間を定義します。 |
角度 | ボルトがネジに入るようスピンドルの回転ターゲット角度を定義します。 |
最大トルク | ソフトスタート時にかかるトルク上限値を定義します。トルク最大を超過すれば、締め付けは NOK と見なされます。 |
リヒット検出 | 早期:既に締め付けたねじ / ボルトが検出されると直ちに締め付けを終了します。締め付けは NOK とみなされます。ソフトスタートが有効になっていることが必要です。 完了:すでに締め付けたネジ / ボルトが検出されても、すべての締め付けステップが実行されるまで締め付けは終了しません。締め付けは NOK とみなされます。ソフトスタートがアクティブでない場合にリヒット検出を行うには、リヒット検出完了オプションを選択する必要があります。リヒット検出完了では、すべての締め付けステップが実行されるまで締め付けを終了しません。速度がランダウン速度の半分に達しなかった場合、その締め付けはリヒットと見なされ、リヒットエラーが表示されます。 オフ: リヒット検出は実施されません。 コンビネーションソフトスタート = オフとリヒット = 早期は許可されません。 |
正 | TrueAngle 補正は、ツールの回転を検出し、設定された制限内で角度補正を行うことができます。 |
負 | TrueAngle 補正は、ツールの回転を検出し、設定された制限内で角度補正を行うことができます。 |
アタッチメント調整を使用 | アタッチメントは、ラジオボタンで選択されます。 |
変速比 | ソケット回転速度 = ツール速度/ギア比。 |
効率の調整 | 例えば、0.9 は 10% の効率の損失を意味します。 |
ランダウン
ランダウンの間に、ツールは、一定のモーター速度となる高速モードかパルスモードのいずれかを使用することができます。選択は、遭遇したトルクと、設定で指定されたトルク制限に応じて行われます。
パラメーター名 | 説明 |
|---|---|
高速ランダウン | ランダウンステップは、オーバーシュートすることなく時間を最短にするために高速で行うことができます。これは、指定された角度長さに対して高速でツールを作動させることで行うことができます。この角度に達すると、速度は、ランダウン速度パラメーターに指定されている低速に変更されます。SRB ツールでのみ使用できます。 長さ:既定値 3600°、最大値 99999° Speed (速度):ツール最大速度は、ランダウン速度(rpm)よりも高くなければなりません。 |
ランダウン速度 | ランダウン速度は最大か手動のいずれかに設定できます。 ランダウン速度が手動に設定されている場合、ツール速度を rpm で入力します。 |
ランダウン角度範囲 | オフ: ランダウン角度制限はオフになっています。 トリガーから:ランダウン角度限界はオンになります。システムは、ツールトリガが押され、角度範囲に違反していると報告があると同時に、システムが締め付け角の監視を始めます。 トルクから:ランダウン角度限界はオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 |
ランダウン角度監視トルク | ランダウン角度制限が設定されている場所からのトルク値。 |
最小角度 | 開始点からの低角度範囲の角度値 |
最大角度 | 開始点からの高角度範囲の角度値 |
最短時間 | ステップの最短時間。 |
最長時間 | ステップの最長時間。 |
ランダウンパルス制限 | ショートカットメニューから選択: オフ: ランダウンパルス制限はオフになっています。 トリガーから:ランダウンパルス制限はオンになっています。システムは、ツールトリガーが押され、パルス制限に違反していると報告があると同時にパルスの監視を始めます。 トルクから:ランダウンパルス制限はオンになっています。システムは、指定のトルク値からのパルスの監視を始め、パルス制限に違反していることを報告します。 |
ランダウンパルス監視トルク | ランダウンパルス制限監視が開始する場所からのトルク値。値は、連続最大トルクより大きな値に設定する必要があります。 |
パルス最小 | ランダウン完了トルク値に到達するまでのパルスの最小数。 |
パルス最大 | ランダウン完了トルク値に到達するまでのパルスの最大数。 |
ランダウン完了トルク < 0 | スナグに達してランダウンが完了した際のトルク値を定義します。プログラムは、締め付けを進め、ランダウン時にすでに完了していなければパルスモードで起動します。 |
締め付け
パラメーター名 | 説明 |
|---|---|
ターゲットトルク | 締め付けののための最終ターゲットトルク。 |
パルスエネルギー | パルスエネルギー ツールが各パルスで送達できる最大エネルギーのパーセントとして表示したアクションパルスで送られたもの。 |
反力調整係数 | ツールによって送られるエネルギーをパーセント値で表したもの。反力調整係数は、アクションエネルギーに基づいており、快適な反応をもたらします。 |
残留トルクの相関係数 | [残留] トルクの相関係数の用語は、較正と同様であり、電気ツールで測定する動的トルクと制御ツールで測定する残留トルク間で調整します。 |
トルク限度 | 制限は、自動的にまたは手動で選択できます |
最小トルク | ステップの最小トルク。 |
最大トルク | ステップの最大トルク。 |
角度限界 | オフ: 角度制限はオフになっています。 ランダウン完了から:角度制限はオンになっています。システムは、ランダウン完了に達し、角度制限の違反報告と同時に、締め付け角度の監視を始めます。 トルクから:ランダウン角度制限がオンになります。システムは、指定のトルク値からの締め付け角の監視を始め、角度範囲に違反していることを報告します。 |
ランダウン角度監視トルク | ランダウン角度制限監視が開始する場所からのトルク値。 |
最小角度 | 開始点からの低角度範囲の角度値。 |
最大角度 | 開始点からの角度上限の角度値。 |
最短時間 | ステップの最短時間。 |
最長時間 | ステップの最長時間。 |
パルス制限 | オフ: パルス制限監視なし。 完了ランダウンから:監視は、ランダウン完了トルクに達した時点で開始します。 トルクから:指定トルク値に達すると監視が開始します。 |
最後のパルス監視トルク | パルス制限が監視される時点からのトルク値 |
パルス最小 | 最終ターゲットに達するためのパルスの最小数。 |
パルス最大 | 最終ターゲットに達するためのパルスの最大数。 |
早期のトルク喪失検出時間 | トルクの一定の増加はランダウンから締め付けに移動するときが想定されます。ソケットが抜けたり、ネジ頭が壊れると、トルクが低下する可能性があります。これは、監視ウィンドウで検出されることがあります。 |
直接駆動式電動ツールによるパルス締め付け
以下の原理は、直接駆動電動ツールに適用されます。アトラスコプコの SRB ツールシリーズに適用可能です。
パルス締め付けでは、モーターにおける電流をパルス化する技術を使用し、以下の二つの異なる機能を備えています。
締め付け方向に正のトルクを付加するアクション電流。
逆トルクを付加することで快適な反応を作り出す反応電流。
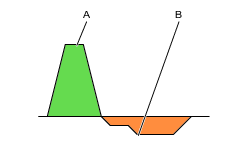
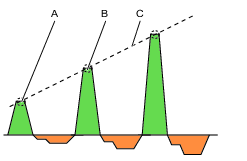
A | 締め付け緑をかけるアクションパルス |
B | 快適さのための反応パルス |
図は、電流パルス締め付け戦略の一般的な原理を示します。詳細な曲線は、ツールタイプと締め付けアルゴリズムによりって異なります。
アクション電流と反応電流とともに図に示すように、パルス周期は、2 つのフェーズで構成されます。最終ターゲットに達するまで、各アクションパルスはトルクを締め付けに追加します。各反応パルスは、快適な反応を提供する反力を作り出します。
アクションフェーズと反応フェーズのエネルギーレベルは、設定可能なパラメーターです。これら 2 つのパラメーターの組み合わせにより、オペレーターの快適さをもたらす効率的な締め付けを作り出します。
TensorPulse プログラムを使用した締め付け
以下の原理は、直接駆動電動ツールに適用されます。アトラスコプコの SRB ツールシリーズに適用可能です。
各パルス期間の後に、ネジで得られるトルクが増加します。一連のパルス後、最終的なトルクターゲットに達します。
A | パルス N の最大の正エネルギー |
B | パルス N+1 の最大の正エネルギー |
C | エネルギーの増加(トルク) |
アクションフェーズと反応フェーズのエネルギーレベルは、ユーザーが設定可能なパラメーターです。これら 2 つのパラメーターの組み合わせにより、オペレーターの快適さをもたらす効率的な締め付けを作り出します。各期間で送ることのできる最大エネルギーのパーセントとして、2 つの段階でエネルギー量を設定することができます。
パルスエネルギー:パルス期間中にかけることのできる最大エネルギーのパーセンテージとして、各正パルスにかかるエネルギーの量。この値は、10~100% の間になります。
反力保持率:パルス期間中にかけることのできる最大エネルギーのパーセンテージとして、各反力パルスにかかるエネルギーの量。この値は、0~75% の間になります。
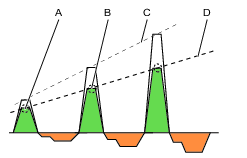
A | パルス N の低下した正エネルギー |
B | パルス N+1 の低下した正エネルギー |
C | 最大パルスエネルギーを使用したトルクのビルドアップに対して得られる曲線。 |
D | 低下したパルスエネルギーを使用したトルクのビルドアップに対して得られる曲線。 |
小さなパルスエネルギー(低下したエネルギー)では、トルクが小さなステップで増加するため、ターゲットトルクに達するために、より多くのパルスが必要です。小さなステップでは、ターゲットに達したときの締め付け終了で、より良い精度が得られます。小さなパルスでは、ツールの動きが小さくなり、オペレーターの快適性が向上します。
正しく調整した反力保持率により、必要なオペレーターの快適さが得られます。この率が高すぎると、オペレーターは、ツールの時計回りの回転を感じます。この率が低すぎると、オペレーターは、ツールの反時計回りの回転を感じます。
理想的な構成では、反力エネルギーにより緩み力を生じません。ターゲット値に達するためのパルスの量が増加する場合、この値の設定が高すぎ、小さな緩みが各パルスで起こります。
パルスエネルギーと反力保持率の最適な値を調整して、ツールの最適なパフォーマンスと最高のオペレーターの快適さを得る必要があります。
インパルスシングルステップ締め付けプログラム
ランダウン
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ランダウン速度 | ラジオボタンで選択されます。 ランダウン速度は、最大と手動間で選択できます。 | 最大値 | |
ランダウン速度 | ランダウン速度 = 手動 | ランダウンステップ時のツール速度を指定します。 | |
ランダウン時間制限 | ショートカットメニューから選択: オフ: ランダウン時間制限はオフになっています。 トリガーから:ランダウン時間制限はオンになっています。システムは、ツールトリガーが押され、時間制限に違反していると報告があると同時に時間の監視を始めます。 トルクから:ランダウン時間制限はオンになっています。システムは、指定のトルク値からの時間の監視を始め、時間制限に違反していることを報告します。 | オフ | |
ランダウン時間監視トルク | ランダウン時間制限 = トルクから | ランダウン時間制限監視が開始する場所からのトルク値。 | |
最短時間 | ランダウン時間制限 = オン | ランダウンに対する最小許容時間。 | 10ms |
最長時間 | ランダウン時間制限 = オン | ランダウンに対する最大許容時間。 | 5000ms |
ランダウンパルス制限 | ショートカットメニューから選択: オフ: ランダウンパルス制限はオフになっています。 トリガーから:ランダウンパルス制限はオンになっています。システムは、ツールトリガーが押され、パルス制限に違反していると報告があると同時にパルスの監視を始めます。 トルクから:ランダウンパルス制限はオンになっています。システムは、指定のトルク値からのパルスの監視を始め、パルス制限に違反していることを報告します。 | オフ | |
ランダウンパルス監視トルク | ランダウンパルス制限 = トルクから | ランダウンパルス制限監視が開始する場所からのトルク値。 | 2.5Nm |
パルス最小 | ランダウンパルス制限 = オン | ターゲットに達するためのパルスの最小数 | 2 |
パルス最大 | ランダウンパルス制限 = オン | ターゲットに達するためのパルスの最大数 | 50 |
ランダウン完了トルク |
| スナグに達してランダウンが完了した際のトルク値を定義します。 | 5Nm |
締め付け
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
目標トルク | 締め付けののための最終ターゲットトルク。 | ||
パルスエネルギー | パルスエネルギー ツールが各パルスで送達できる最大エネルギーのパーセントとして表示したアクションパルスで送られたもの。 | ||
残留トルクの相関係数 | [残留] トルクの相関係数の用語は、校正と同様であり、電気ツールで測定する動的トルクと制御ツールで測定する残留トルク間で調整します。 | 100% | |
トルク限度 | ラジオボタンで選択されます。 制限は、自動的にまたは手動で選択できます | ||
最小トルク | トルク制限 = 手動 | ステップの最小トルク。 | |
最大トルク | トルク制限 = 手動 | ステップの最大トルク。 | |
時間制限 | ショートカットメニューから選択: オフ: 時間制限はオフになっています。 完了ランダウンから:時間制限はオンになっています。システムは、ランダウン完了に達し、時間制限の違反報告と同時に時間の監視を始めます。 トルクから:時間制限はオンになっています。システムは、指定のトルク値からの時間の監視を始め、時間制限に違反していることを報告します。 | オフ | |
時間監視トルク | 時間制限 = トルクから | 時間制限監視が開始する場所からのトルク値。 | |
最短時間 | 時間制限 = オン | 締め付けに対する最小許容時間。 | 10ms |
最長時間 | 時間制限 = オン | 締め付けに対する最大許容時間。 | 1000ms |
パルス制限 | ショートカットメニューから選択: オフ: パルス制限監視なし。 完了ランダウンから:ランダウン完了トルクに達し、パルス数が範囲外であることが報告されると監視が開始します。 トルクから:特定のトルク値に達して、パルス数が範囲外であると報告されれば、監視が開始します。 | オフ | |
最後のパルス監視トルク | パルス制限 = トルクから | パルス制限が監視される時点からのトルク値 | |
パルス最小 | パルス制限 = オン | 最終ターゲットに達するためのパルスの最小数。 | 2 |
パルス最大 | パルス制限 = オン | 最終ターゲットに達するためのパルスの最大数。 | 50 |
早期のトルク喪失検出時間 | トルクの一定の増加はランダウンから締め付けに移動するときが想定されます。ソケットスリップ、または壊れたネジヘッドにより、トルクの低下を引き起こす可能性があります。これは、監視ウィンドウで検出されることがあります。 | 200 ms |
回転
回転戦略は、主にテストや実証目的のための戦略です。ツールを自由に回転させる場合、可能な限り低いトルクを使用して指定角だけソケットを回転させます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ターゲット速度 | 回転戦略のターゲット速度 |
|
<Target speed> | 回転戦略時の手動ツール速度 | ツール最高速度の 16.5% |
ターゲット角度 | スピンドルの回転角 | 360° |
外部結果
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。
信号が送信されると、結果ビューは、締め付けプログラム(指定されたトルク値、角度値、またはテキスト文字列)で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
トルク <目標トルク> | 所望の表示されたターゲットトルク値の数値 | 0.00 |
角度 <目標角度> | 所望の表示されたターゲット角度値の数値 | 360° |
テキスト | 希望する表示されたテキストの英数字文字列。 |
|
本セクション内
ツールを接続した状態で外部結果の締め付け戦略を実行する
ホームビューで、[締め付け]タブを選択します。次に、 外部結果戦略を使用して締め付けプログラムを作成します。
ホームビューに戻り、[仮想ステーション] タブを選択します。
[ライセンス] ウィンドウで、 外部結果 ツールを接続した状態での締め付け戦略 機能を使用するには、ライセンスを割り当てて仮想ステーションで使用する必要があります。
ツールウィンドウで、必要なツールを選択します。次に、ツール構成を選択します。
タスクウィンドウで、 外部結果戦略を使用した締め付けプログラムを選択します。
仮想ステーションにEXTERNAL_OK信号を送信します。
結果に行くボタンを選択して結果を表示します。
結果は、仮想ステーションに接続されているツールのツール構成から送信されます。
締め付けプログラムとエラー報告の検証
締め付けプログラムは、新しい値が入力されるか、変更されると同時にパラメータ規則とツールのプロパティで自動的に検証します。検証でエラーを検出すると、エラーの説明とともにレポートされます。
本セクション内
検証エラー報告
検証がエラーになると、パラメータの隣のアイコンまたはエラーの原因となったパラメータとともに表示されます。アイコンをタップすると、エラーの簡単な説明が示されます。
例(イメージ参照):
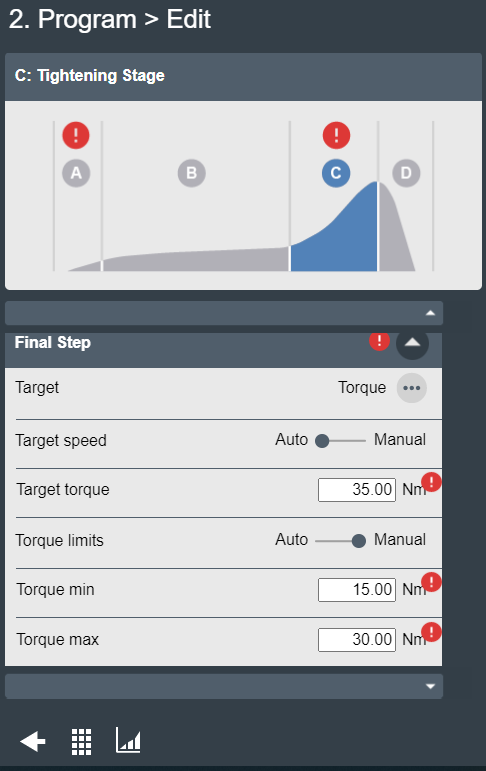
ターゲットトルクは、トルク最小値 23.75 Nm およびトルク最大値 24.5 Nm(この値は、画像のポップアップウィンドウで隠されている)に設定した[最終]トルク制限値で 25 Nm に設定されています。
トルク最大パラメータの隣にある検証エラーのアイコンをタップすると、ターゲットトルクがトルク最大値より大きい(トルク最大値 <= ターゲットトルク)というエラーの簡単な説明が表示されます。
エラーを修正するには、トルク最大値を調整して、ターゲットトルクより大きくなるようにすると、エラーアイコンが表示されなくなります。
締め付けプログラムでのツール検証
[締め付け] メニューで、[締め付け] プログラムライブラリまたは[マルチステップ] プログラムライブラリを選択します。必要に応じて、リストで特定のプログラムを選択します。検証は、プログラムのリスト全体、または個々のプログラムの両方に対して行うことができる点にご注意ください。
GUIの右上隅にあるプラスアイコンを選択します。
ポップアップウィンドウで、締め付けプログラムを検証するためのツールを選択し、検証をクリックします。
締め付けプログラムが、選択したツールと互換性がない場合は、感嘆符とともに赤い円で示されます。
締め付けプログラムツール互換性テーブル
締め付け戦略が使用できるかどうかは、そのコントローラにインストールされているライセンスによって異なります。
締め付け戦略 | ES | ST | STR | SR | SB+ | ETT | SL (低電圧) | QST | STB | SRB 2.0 ETP-SRB31-20 | SRB 2.1 ETP-SRB31-25 | SRB-HA | TBP / TBP-S | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2 ステップ | X | X | X | X | X | X | X | X | X | X | - | X | - | - | - |
クイックステップ | X | X | X | X | X | X | X | X | X | X | X | X | - | - | - |
3 ステップ | X | X | X | X | X | X | X | X | X | X | - | X | - | - | - |
TurboTight | X | - | X | X* | - | X | - | - | - | X | X | - | - | - | - |
回転 | X | X | X | X | X | X | X | X | X | X | - | X | - | - | - |
外部結果 | X | X | X | X | X | X | X | X | X | X | X | X | X | - | X |
TensorPulse | - | - | - | - | - | - | - | - | - | X | X | - | - | - | - |
インパルス - シングルステップ | - | - | - | - | - | - | - | - | - | - | - | - | X | - | - |
レンチ生産 | - | - | - | - | - | - | - | - | - | - | - | - | - | X | - |
レンチ品質 | - | - | - | - | - | - | - | - | - | - | - | - | - | X | - |
* SR31でのみ使用できます。
締め付け機能 | ES | ST | STR | SR | SB+ | ETT | SL (低電圧) | QST | STB | SRB 2.0 ETP-SRB31-20 | SRB 2.1 ETP-SRB31-25 | TBP / TBP-S | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
真の角度 | - | - | X | - | - | X | - | - | - | - | - | - | - | - |
マルチステッププログラム
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
マルチステップ締め付けとは、複数のステップで行われる締め付けです。ステップ数およびステップのタイプは、行われる締め付けに応じて変わります。マルチステップ締め付けプログラムは、監視機能と制限を含む、高度な設定が可能です。
本セクション内
マルチステップ GUI インターフェース
Multistep tightening programs can only be edited in the web GUI.
マルチステッププログラムのインターフェースは主に 3 つのエリアに分けられます。
上部には、マルチステップ締め付けプログラムのプロパティのドロップダウンメニューがあります。ここでは、プログラム名、全体のプログラムモニター、検証などの一般的なプロパティが入力できます。
右側には、マルチステッププログラムを構築するために使用できるステップ、モニター、制限を含む 3 つのタブがあります。項目を使用するには、該当するタブをクリックし、リスト中の項目を締め付けエリアにドラッグします。機能に合わせて、項目をプログラムの開始と終了の間にドロップする (ステップの場合) か、特定のステップの上にドロップ (モニターと制限の場合) します。
インターフェースの主なエリアは締め付けエリアで構成されています。ここには、締め付けプログラムのすべてのステップが含まれます。ズームボタンは、締め付けエリアをズームインまたはズームアウトするために使用します。
At bottom left of the screen there is a Copy Tightening Program button and a Delete Tightening Program button.
締め付けステップ
このセクションでは、PF6000およびPF6 StepSyncコントローラで有効な締め付けステップをリストアップします。
一般パラメーター
タイトル
必要に応じて各ステップの名前を変更できます。
回転方向
各締め付けステップは、前方 (ネジを締め付ける) または後方 (ネジを少し緩める) のいずれかで実行できます。矢印がこの方向を示します。角度に合わせて締め付け、トルクに合わせて締め付けなど、多くの締め付けステップには方向が前方にハードコードされています。角度に合わせて緩めやトルクに合わせて緩めなどのステップでは、方向が後方(逆方向)に自動的に設定されます。
リバースの設定は 、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールでは使用できません。締め付けプログラムの締め付け方向は、締め付けの実行を可能にするために、オープンエンドツールの締め付け方向と同じである必要があります。オープンエンドツールの締付けプログラムに緩めプログラムを割り当てることは可能ですが、方向スイッチが緩めプログラムを実行するように設定されている場合、ツールはロックされます。
ステップカテゴリ
各ステップに、ステップカテゴリを選択するオプションがあります。ステップカテゴリを選択すると、NG 締め付けが、関連する詳細ステータスと該当するマルチステップエラー情報を示してイベント結果ビューにリスト表示されます。選択しないと、削除されたステータスは「未分類マルチステップエラー」に設定されます。関連する削除されたステータスは分類できます。
角度ウィンドウ
ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
速度ランプ/加速(ToolsTalk 2でのみ使用可能)
ほとんどのステップで、目標速度までの加速を達成する方法を指定できます。ハード、ソフト、手動の 3 つの設定が指定できます。ステップが開始されるたびに、定義された加速が使用されます。ツールがステップの開始時に異なる速度ですでに作動していても、これに関わらずランプが使用され、ステップの目標速度まで加速されます。ステップの開始時の速度が目標速度より速い場合または遅い場合でも、同様となります。
速度ランプ - ハードおよびソフトモード:
加速 | 使用される速度ランプ |
|---|---|
ハード | 2000 rpm/s (1000 ~ 10000 rpm/s の速度ランプはハード加速。) |
ソフト | 500 rpm/s (200 ~ 1000 rpm/s の速度ランプはソフト加速。) |
速度ランプ - 手動モード:
パラメータ | デフォルト値 | 最小限度 | 最大限度 |
|---|---|---|---|
速度 | 60 rpm | > 0 であること | ツール最大速度以下であること |
加速 | 500 rpm/s | > 0 であること | ツール最大加速以下であること |
スピードシフトの使用
ステップ中に速度が変わる、角度トリガまたはトルクトリガを1~5個定義できます。
速度シフトは、[構成] フィールドに追加できます。
1つのステップでは、すべてのスピードシフトトリガは、(トルクまたは角度の)同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。
スピードシフトを追加するには:
スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加を選択します。次に、角度範囲またはトルク範囲を選択します。
スピードシフトの角度/トルクのフィールドが開きます。以下の表に従って値を追加します:
パラメータ
説明
Angle/Torque trigger (角度/トルクトリガ)
> 0 であること
速度
> 0 であること
速度ランプタイプ
ハードまたはソフト
トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。
トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。
スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。
制動動作の制御(エルゴ停止/慣性)
マルチステップ締め付けプログラムの制動動作は、プログラムの2つの場所で制御することができます。締め付け方向の逆転に先行するステップ、および/または締め付けプログラムの最終ステップの2つの場所です。マルチステッププログラムの他の場所において、ステップの一般設定では制動パラメータは使用できません。制動はエルゴ停止または 慣性のいずれかに設定できます。エルゴ停止 はより人間工学的な締め付けの減速を可能にする一方、慣性 は工具を完全に制動します。
制動のタイプを設定するには、ステップの設定に入り、制動の構成のドロップダウンをエルゴ停止または 慣性に設定します。慣性には追加パラメータはありません。
エルゴ停止パラメータ
パラメータ | 説明 |
|---|---|
適合型制動 | 適合型制動をオンまたはオフに設定します |
ランプ時間 | 適合型制動がオフに設定されている場合にのみ使用できます。時間をms(ミリ秒)で挿入します。 |
個々のステップのリスト
次の締め付け手順は、オープンエンドタイプのギアフロントアタッチメント (GFA) で構成されたツールではサポートされていません。
A - 角度に合わせて緩める
TrR – トリガーリリースに合わせて緩める
T – トルクに合わせて緩める
E – 噛み合わせ
SR - ソケット解除
DT – DynaTork に合わせて締め付け
TP - TensorPulse
Cクラッチ
このステップでは、クラッチが解放されるまで、プログラムされた速度を順方向に実行します。工具がクラッチの解放を報告すると、ステップはOKステータスで終了します。
クラッチステップを使用する締め付けプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
スピードコントロール | 一速または二速 |
最終速度 | プログラムの最終速度を設定します[rpm] |
速度ランプ | 速度ランプを選択できるスイッチ[ハード、ソフト] |
リヒット | リヒット検出をオンまたはオフに設定します |
リヒット角度 | リヒット角度を設定します[°] |
CLクラッチ緩め
このステップでは、ツールのトリガが解除されるまで、プログラムされた速度で逆方向にツールを実行します。
クラッチステップを使用する緩めプログラムには、それ以外のステップを割り当てられません。
このステップは、クラッチツールBCV-REおよびBCP-REに対してのみ有効です。
パラメータ | 説明 |
|---|---|
最終 | プログラムの速度を設定します[rpm] |
W – 待機
このステップでは、ツールは指定された時間だけ待機します。待機中はツールは回転しません。
ツールが指定された時間待機します。保持位置がオンに設定されている場合、ツールは待機時間中その位置を保持します。
SR - ソケット解除
このステップは、目標角度に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
マルチステップ締め付けプログラムの締め付けパスの最後のステップとしてのみ、このステップの使用は許可されています。ただし、このステップの後に同期点を追加することは可能です。
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。 既定:3 度、> 0 であること |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
DI – デジタル入力まで実行
この手順では、[デジタル入力]で指定された入力が[停止条件]の値に応じて高または低になるまで、パラメーター方向によって定義された方向にツールを作動させます。
この手順は、STBツールでは使用できません。
パラメータ | 説明 |
|---|---|
向き | 前方向または後方向 |
デジタル入力 | コントローラ上の次のローカルデジタル入力のいずれかを選択できます。
|
停止条件 |
|
速度 (rpm) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合に使用できます。既定:500 rpm/s。 |
A – 角度に合わせて締め付け
このステップでは、目標角度に達するまでツールが作動します。目標角度は、ステップの開始から測定されます。
パラメーター
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。> 0 であること。 |
速度 | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
A - 角度に合わせて緩める
このステップは、角度目標に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
パラメーター
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。> 0 であること。 |
速度 | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
TrR – トリガーリリースに合わせて緩め
このステップは、ツールトリガが解除される(緩められる)まで逆方向に作動します。これは、プログラムの最後のステップとしてのみ使用できます。
STB ツールでは、このステップは緩めプログラムのみに適用されます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
TTTR - トリガー解除まで締める
このステップは、ツールトリガが解除される(締め付けられる)まで作動します。締め付けプログラムの最後のステップとしてのみ使用できます。
パラメータ | 説明 |
|---|---|
速度 | 回転速度の数値。 rpmで表します。 |
速度ランプタイプ | 速度ランプを選択できるオプションのリスト[ハード、ソフト、マニュアル] |
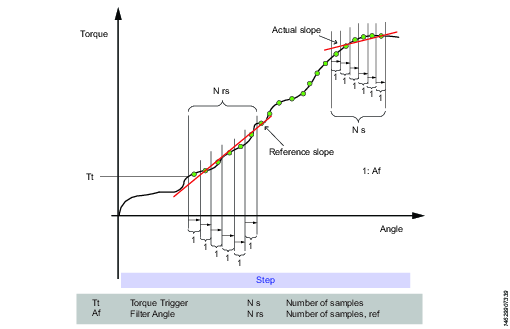
降伏点まで締める、方法 2 (YM2)
このステップでは、降伏点が検出されるまで、指定した速度でツールを順方向に実行します。
降伏点の検索は、トルクがTtに達したときに開始されます。Af度にわたるトルクの平均が計算されます。この手順はN rs回繰り返されます。
参照傾斜は、N rsにわたる線形回帰で計算されます。この後、新しい平均値は、A f の度数にかけて、継続的に計算されます。
実際の傾斜は、最後のN sの平均点にわたる線形回帰で計算されます。傾斜が参照傾斜のPy %より小さい場合、降伏点に達します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
フィルタ角度 | 既定:1.> 0 であること。 |
サンプル数 | 既定:6.>=4 であること。 |
pf サンプル数、基準 | 既定:6.>=4 であること。 |
降伏点のパーセント | 既定:90%。>20% であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
T - トルクに合わせて締め付け
このステップでは、目標トルクに達するまで、プログラムされた速度でツールを順方向に実行します。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
T – トルクに合わせて緩める
このステップでは、逆方向にこの速度でツールを作動させます。ステップを有効にするには、トルクが最初に目標トルクの110%を超えている必要があります。目標トルクは正の値に設定する必要があります。目標トルクに達すると、トルクが目標トルクを下回るまでステップが実行されます。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
T+A – トルクと角度に合わせて締め付け
このステップでは、目標トルクに達するまでツールを作動させます。この時点から、追加の目標角度まで継続して作動します。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
目標角度 | 目標の角度。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
T|A – トルクまたは角度に合わせて締め付け
このステップでは、トルクターゲットまたは角度ターゲットの、いずれかに先に到達するまで、速度 n で前方向にツールを実行します。トルクと角度の測定は、ステップの最初から開始します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
目標角度 | > 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
T&A – トルクと角度まで締め付け
ツールは、目標トルクと目標角度の両方に達するまで、指定された速度で順方向に作動します。目標トルクと目標角度は 0 より大きい数値に設定する必要があります。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
目標角度 | 既定:0.> 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
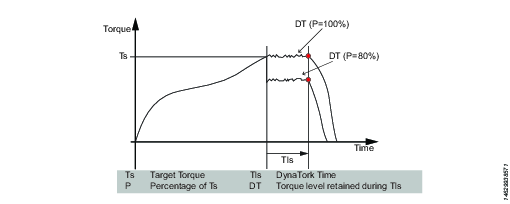
DT – DynaTork に合わせて締め付け
このステップでは、 目標トルクに達するまで、ツールを速度nで順方向に作動させます。その後、ツールは DynaTork 時間中、目標トルクの DynaTork パーセンテージで電流を一定に保持します。
ツールの過熱を避けるため、ツールの最大トルクの 40% を超えて DynaTork を作動させないことを強く推奨いたします。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
DynaTork 時間 | DynaTorkがアクティブになる時間。 |
DynaTork パーセント | トルクターゲットのパーセンテージ。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 (rpm) | 既定:60 rpm。 |
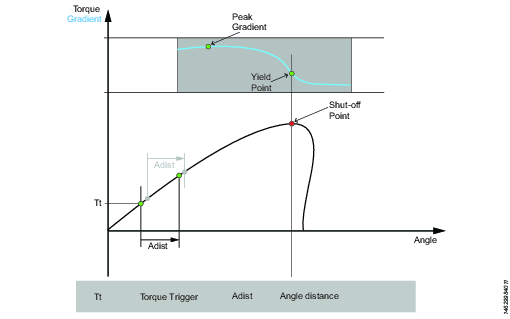
Y – 降伏に合わせて締め付け
この手順は、STBツールでは使用できません。
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点は、トルクと角度の距離測定を基に計算されるトリガートルクレベルをトルクが超えてから、トルク勾配を監視して検出されます。角度距離パラメータは、指定されたジョイントのハードさに応じて設定されます。
勾配角度ウィンドウを設定します (ハードジョイント、ソフトジョイント、角度ウィンドウの手動設定)。手動を選択する場合、角度ウィンドウを設定する必要があります。ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | 角度の測定は、このトリガから開始します。> = 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
降伏点のパーセンテージ | >= 20% であること |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
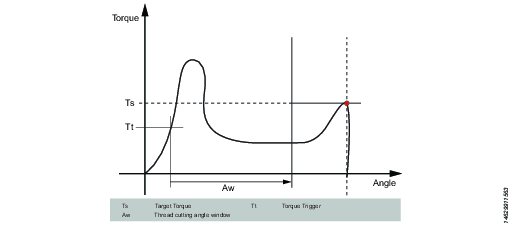
ThCT – トルクに合わせてスレッドカット
トルクに合わせてスレッドカット機能では、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ネジを用いて金属の薄層を締め付ける際などの締め付けが可能になります。ツールは、スレッドカット角度 (Aw) に達するまで前方向に作動します。スレッドカット角度ウィンドウは、トルクがスレッドカットトリガートルク (Ttc) を初めて超える時点から測定されます。スレッドカット角度に達した点から、ステップは目標トルク (Tt) に達するまで連続して作動します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
スレッドカット角度ウィンドウ | 既定:0.> 0 であること。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
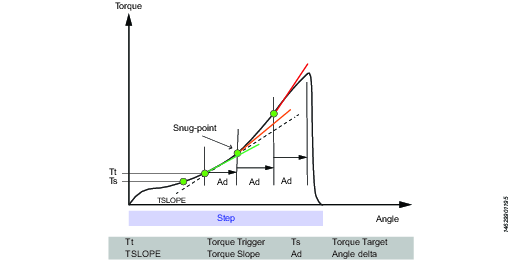
RD – ランダウン
この手順は、STBツールでは使用できません。
ランダウンステップは、ネジがスレッドに入ってからネジヘッドが下位面に触れて着座ポイントに達する直前までの締め付けです。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
このステップは順方向の速度でツールを実行します。ランダウンタイプ、トルク、または着座に応じて、ステップの動作は次のとおりとなります:
ランダウンタイプ:トルクに合わせる:指定された目標トルクが見つかるとステップは停止します。
ランダウンタイプ:着座に合わせる:着座の勾配計算は、指定されたトルクトリガレベル Tt で始まります。トルクトリガが設定されていない場合は、ステップの開始時に勾配計算が開始されます。
勾配の計算は、 A d度離れた2つの角度点の間で行われ、次のように計算されます:(Tn – Tn-1)/(An – An-1)および、互いに続く2つの勾配がTSLOPEより大きくなるとすぐに 、着座点が見つかります。
パラメータ | 説明 |
|---|---|
ランダウンタイプ | トルクに合わせる または 着座に合わせる。 |
目標トルク | 既定:「設定なし」> 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
トリガートルク | ランダウンタイプが着座に合わせるである場合、[トリガートルク]フィールドが表示されます。 既定:「設定なし」> 0 であること。 |
デルタ角度 | ランダウンタイプが着座に合わせるである場合、 デルタ角度フィールドが表示されます。 既定:「0」> 0 であること。 |
トルクレート | ランダウンタイプが着座に合わせるである場合、[トルクレート]フィールドが表示されます。 既定:「0」> 0 であること。 |
E – 噛み合わせ
この手順は、STBツールでは使用できません。
このステップでは、ソケットがネジに噛み合うまで両方向にツールが作動します。ステップは、噛み合わなければ継続がはいに設定されている場合は、目標トルクまたは目標角度に達するまで継続します。いずれかの方向で目標角度に達すると、方向が反転します。噛み合わせの最大試行回数を入力すると、検索の繰り返し回数を制限できます。いずれかの方向で目標トルクに達すると、ステップは OK のステータスで終了します。
Ext - 外部結果
外部結果は、外部のデジタル信号 (締め付け中に測定されるトルクまたは角度の値ではなく) で締め付けに OK が示される際に使用される戦略です。この外部信号は、(例えば、I/O バスを介して) Power Focus 6000 にデジタル信号を供給できる任意の手段を介して供給できます。
信号が送信されると、結果ビュー (記録されているデータ) は、締め付けプログラム (指定されたトルク値、角度値、またはテキスト文字列) で与えられたターゲットパラメーターの値を表示します。これら (トルクおよび角度) の値は、実測値を示すものではなく、挿入されたテキストのみを示します。
パラメータ | 説明 |
|---|---|
トルク <目標トルク> | 希望する表示された目標トルク値の数値。例えば、クリック式レンチからの信号は <目標トルク> と表示されます。 |
角度 <目標角度> | 希望する表示された目標角度値の数値。例えば、クリック式レンチからの信号は <目標角度> と表示されます。 |
テキスト | 希望する表示されたテキストの英数字文字列。例:「オイルが交換されました」。 |
MWR - メカトロニック レンチ
メカトロニック レンチは、メカトロニック レンチ(MWR)と組み合わせてのみ使用できる特殊なステップです。
このステップは、他のステップと組み合わせて使用することはできません。このステップでは、制限は使用できません。デフォルトでは、このステップには次の3つのモニターがあります。ピークトルク、角度、およびクリックです。
パラメータ | 説明 |
|---|---|
緩め制限 | 締付け結果がNG(締め付け方向の間違い(緩め))とマークされた負のトルク(すなわち緩め方向のトルク)の数値。 (Nm)単位。 |
ツールサイズ | MWR-TAに取り付けられたエンドフィッティングツールの特定の長さの数値。(mm)単位。 |
ツールベンド | MWR-TAに取り付けられたエンドフィッティングツールの数値。 (°/Nm)単位。 |
リヒット角度ウィンドウ | トルクに達した場合に既にねじが締め付けられているかどうかを判断するための角度の数値。 (°)単位。 |
最大角速度 | ねじを締めることができる最大速度の数値。(°/ s)単位。 |
WP - レンチ生産
STWrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチ生産 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
目標トルク | 締め付けステップに対するターゲットトルクを定義します。 |
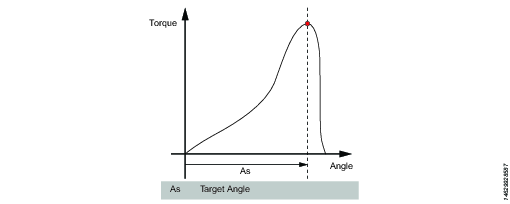
トルク測定点 | トルクを測定する場所を指定します。 [ピークトルク] または [ピーク角度]のいずれかを選択します。
|
角度検索制限 | これは、締め付けのトルク結果値を設定するために使用されるオフセットです。このパラメータを使用するには、 測定トルクをピーク角度に設定する必要があります。 |
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
終了サイクル時間 | 終了サイクル時間を示すミリ秒 (ms)単位の数値。トルクがランダウン完了を下回ったときに適用されます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
補正値 | [平均トルク]または[ピークトルク]から選択します。補正値は、PVTの計算方法を指定します。 平均トルク - PVTは、以下を使用して計算された平均に基づきます:
ピークトルク - PVTは、着座が検出される前に測定されたピーク値に基づきます。 |
遅延監視 | PVT計算は、このウィンドウを通過する前に開始されず、締め付け開始時に開始されます。 |
PVT 間隔 | PVT距離ポイントから開始して、PVTウィンドウを計算する角度を設定します。 |
PVT 距離 | システムがPVTウィンドウを開始する着座前の角度を設定します。 |
プリベイリングトルク最小 | プリべリングトルクの下限。 |
プリベイリングトルク最大 | プリべリングトルクの上限。 |
WQ - レンチの品質
STwrench を使用して行う締め付けの品質テストに使用する戦略。
パラメータ | 説明 |
|---|---|
コントロール戦略 | レンチの品質 ステップタイプは、次のコントロール戦略で構成できます。
|
選択したコントロール戦略に基づいて、以下にリストされているいくつかのパラメーターの組み合わせが表示されます。
パラメーター | 説明 |
|---|---|
ラチェット時間 | ラチェット時間の数値(デフォルトは5000 ms)。これにより、オペレーターはしばらくの間トルクを解放し、締め付け操作中に再充電することができます。 ラチェット時間が超過した場合、締め付けの結果は「締め付けタイムアウト」の理由でNGとしてマークされます。 |
トルク補正係数 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する場合のトルク読み取り値を補正するために使用されます。既定値は1です。 |
角度補正 | このパラメータは、レンチに延長またはトルクマルチプライヤーを使用する際の角度の読み取り値を補正するために使用されます。既定値は0です。 |
目標角度 | 締め付けステップに対する目標角度を定義します。 |
リヒット検出 | オンまたはオフ。リヒット検出は、角度制限設定に基づいて、締め付けがリヒットするタイミングを決定するために使用できます。[リヒット 方向] が [オン] に設定されている場合、リヒットの角度制限 が有効になります。 |
線形勾配係数 | 線形勾配係数は、Nm/Deg 測定単位でのトルク/角度勾配として、曲線の線形部分のジョイント剛性を特徴付けます。 |
TP - TensorPulse
TensorPulseの締め付けステップを使用する前に、次のライセンスタイプがコントローラーにインストールされている必要があります。
低反力戦略
TensorPulseは、次のツールでのみ有効です:ETV-STR61-100-13、ETV-STR61-70-13、ETV-STR61-50-10。
このステップは、トルク目標に到達するまで、順方向に締め付けパルスを生成します。
TensorPulse締め付けステップを実行する場合は、必要な PulseDrive ソケット/アダプターを使用してください。
TensorPulse締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメータ | 説明 |
|---|---|
トルク目標 - Ts | トルク目標は、0からツールの最大トルクまでの範囲である必要があります。 |
パルスエネルギー - Pe | パルスエネルギーは、各パルスのエネルギー/電流の量を制御するために使用されます。 パルスエネルギーは10%から100%の範囲である必要があります。 |
反力調整係数 | 保持力調整係数は、 TensorPulseステップを実行する際の反力を調整するために使用されます。各パルスの後にツールを反対方向に動かすのは力です。 保持力調整係数は、0〜100%の範囲である必要があります。 |
トレースでは、角度反転は、ツールが後方に回転してパルスを有効にすることを意味しますが、PulseDriveソケット/アダプターにより、ボルトヘッドは必ずしも後方に回転するわけではありません。
本セクション内
トレース設定
トレース構成がプログラムレベルで有効になっている場合、トレース分解能はステップレベルで構成できます。トレース設定の設定は、特定の各ステップでサンプリングを行う方法を定義します。
このトレース記録では、サンプルレートはすべてのステップで同じではなく、サンプルレートは各ステップの構成に依存します。つまり、トレースはステップごとに1つのトレースに分割されます。
パラメータ | 説明 |
|---|---|
トレース設定 |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します(0.25〜1000ミリ秒)。 |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度)。 |
トレース内のサンプルの最大数は4096です。締め付けによって4096個を超えるサンプルが生成される場合、ダウンサンプリングプロセスが実行されます。ダウンサンプリングプロセスでは、締め付け全体から2つおきのトレースサンプルを削除し、半分の分解能で記録を続けます。このプロセスは、4096のサンプル制限に達するたびに繰り返されます。ダウンサンプリング処理はすべてのステップで行われるため、ステップ間の関係は同じです。
トレースチャンネル | 注記 |
|---|---|
トルク | トルクトランスデューサーを装備したすべてのツールで利用可能。 |
角度 | すべてのツールで利用可能。 |
速度 | すべてのツールで利用可能。 |
トルク秒 | 2つのトルクトランスデューサーを備えたツールでのみ使用可能。 |
角度秒 | 2つの角度トランスデューサーを備えたツールでのみ利用可能。 |
電流 | すべてのツールで利用可能。 |
勾配 | ステップ/制限/モニターが勾配値を生成する場合に使用可能。 |
関連情報
ステップモニター
ステップモニターは、角度制限やトルクなど、指定に従って締め付けが達成したことを検証する際に使用されます。各ステップには必須ステップモニターとオプションのステップモニターがあります。必須のモニターは、新しいステップをマルチステッププログラムにドラッグするときに含まれます。オプションのモニターは柔軟に設定でき、必要に応じてマルチステッププログラムに配置できます。各ステップには、それぞれ最大 8 つのモニターを設けることができます。
次のモニターは、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップモニター | 適用可能なステップ |
|---|---|
角度 | すべて |
ピークトルク | すべて |
A – 角度
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。角度の測定は、モニタの開始時、または指定されている場合は、モニタ中に初めてトルクがトリガートルクを通過する時点から開始されます。
パラメータ | 説明 |
|---|---|
タイプ | 次の4種類の角度があります:ピーク角度(既定値)、ピークトルクでの角度、シャットオフ角度、および終了時の角度。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
下限 | 最小許容角度 |
上限 | 最大許容角度 |
YA – 降伏からの角度
このモニターは、降伏点から到達したピーク角度を測定し、ピーク角度が制限内であることを確認します。
このステップモニターは、STBツールでは使用できません。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
降伏点のパーセンテージ | >= 20% であること |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最小許容角度>= 0 であること |
上限 | 最大許容角度> 0 であること |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
MT – 平均トルク
このモニターは、モニター中に平均トルクを測定し、計算値が制限内にあることを確認します。
このステップモニターは、STBツールでは使用できません。
パラメータ | 説明 |
|---|---|
タイプ | 開始条件を指定します:
|
トルクトリガ | [タイプ] が [トリガートルク]、[角度トリガー]、または [角度ウィンドウ]に設定されている場合に使用できます。> = 0 かつ < ツール最大トルクであること。 |
角度トリガ | [タイプ] が [角度トリガー] または [角度ウィンドウ]に設定されているときに使用できます。> 0 であること。 |
角度ウィンドウ | [タイプ] が [角度ウィンドウ]に設定されている場合に使用できます。> 0 であること。
|
時間間隔 | [タイプ] が [時間間隔] に設定されている場合に使用できます。> 0 であること。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PT – ピークトルク
このステップモニターは、監視中に達した、オーバーシュートを含む最大トルクを測定し、それが上限と下限の間にあることを確認します。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PTCA – ポストスレッドカット角度
監視中に達した角度を測定し、指定の角度制限内であることを確認します。トリガートルクレベルは、スレッドカット角度ウィンドウの終了に達するまで無視されます。その後、測定トルクがトリガートルクを超えると同時に角度の測定が開始されます。停止条件のパラメータは、角度測定が終了する時点を指定します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
角度測定タイプ | ピーク角度 ピークトルクの角度 シャットオフ角度 終了時の角度 |
スレッドカットトリガートルク | >= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PTCPT – ポストスレッドカットピークトルク
オーバーシュートを含む、監視中に達した最大トルクを測定し、それがトルク制限内であることを確認します。すべてのトルク値は、スレッドカット角度ウィンドウの終了に達するまで無視されます。
パラメータ | 説明 |
|---|---|
スレッドカットトリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PVTH - ポストビュートルク高
このモニタは、角度ウィンドウの長さ内のすべてのトルク値が上限を下回っていることを確認します。
角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点で開始します。モニターに使用されるトルク値は、サンプル数について計算される平均トルク値に基づきます。ステップの合計角が、開始角度と角度ウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
上限 | 最高許容トルク |
PVTL – ポストビュートルク低
ポストビュートルク高のモニターと同様ですが、このモニターは角度ウィンドウの長さのすべてのトルク値が下限より大きいことを確認します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
サンプル数 | 最小値 = 1 |
下限 | 最低許容トルク |
PrT - プリベリングトルク
モニターはウィンドウの長さでプリベリングトルク値を計算し、それがトルク制限内であることを確認します。角度ウィンドウは、シャットオフ点から逆方向に開始角度に設定された角度で開始します。これは、角度ウィンドウ長さで逆方向に設定された角度にまで及びます。開始角度が空白の場合、角度ウィンドウはシャットオフ点から始まります。計算されたプリべリングトルク値は、ウィンドウ長さ中の平均値またはピークトルク値です(ユーザーが設定したパラメータによります)。計算された値は、測定されたプリベリングトルクの結果データとして保存されます。トルク補正をオンに設定すると、測定されたプリベリングトルクが、連続ステップのすべてのトルク結果値から減算されます。以前に計算されているプリベリングトルク補正値は、トルク結果値からは減算されなくなります。トルク補正がいいえに設定されている場合、連続ステップで減算は行われません。
ステップの合計角が、開始角度とウィンドウの長さの合計より小さい場合、モニターは NG を報告します。
プリべリングトルクは、測定値の平均として、またはピークトルクで測定できます。これら 2 つのモードの間で選択するには、[値の使用] パラメータを平均トルク (平均値の場合) またはピークトルク (ピーク値の場合) に設定します。
パラメータ | 説明 |
|---|---|
トルク補正 | オンまたはオフ。 |
開始角度 | > 0 であること |
ウィンドウ長さ | >= 0 であること |
下限 | > 0 であること |
上限 | >= 0 であること |
使用する値 | 平均トルク (平均値の場合)、またはピークトルク (ピーク値の場合)。 |
PC - パルスカウント
パルスカウントステップモニターを使用する前に、次のライセンスタイプがコントローラーにインストールされている必要があります。
低反力戦略
パルスカウントは、次のツールでのみ有効です。ETV-STR61-100-13、ETV-STR61-70-13、ETV-STR61-50-10。
このモニターはパルス数を測定し、パルス数がパルスカウント下限とパルスカウント上限の間にあるかどうかを確認します。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウントステップモニターで締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメータ | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント上限は、1〜9999999の範囲である必要があります。パルスカウント下限以上である必要があります。 |
パルスカウント下限 - n- | パルスカウント制限は、測定されたパルス数がOKかNGかを判断するために使用されます。
パルスカウント下限は、1〜9999999の範囲である必要があります。パルスカウント下限以下である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
SOT – シャットオフトルク
シャットオフ点は、ステップがその目標に達する点です。トルクは、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
SOC - シャットオフ電流
シャットオフ点は、ステップがその目標に達する点です。電流は、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
SSD - スティックスリップ検出
このステップモニターは、ステップ中のスティックスリップ効果を検出し、報告します。検出は、トルクがトリガレベルを下回った回数を数えることによって行われます。回数が 最大振動数より大きい場合、スティックスリップエラーが報告されます。モニターは、動的と固定の 2 つのモードで動作します。このモード間の違いは、トリガレベルの計算方法です。
動的トルク:トリガーレベルは、監視中に到達した電流の最大トルクのピークトルクパーセンテージとして動的に計算されます。監視は、トルクがトリガートルクを越えると同時に開始されます。
固定トルク:トリガーレベルは、ユーザーの指定する固定されたトリガートルクです。このモードでは、パーセンテージは必要ありません。
トルクがトリガートルクに達しない場合、モニターは開始されず、ステータスは NG になります。
パラメータ | 説明 |
|---|---|
タイプ | モニタの [スティックスリップ検出] で実行する [スティックスリップ検出] の種類を指定します。既定:動的トルク |
ピークトルクパーセンテージ | 既定:80%、>=10 かつ <100 であること。 |
トリガートルク | 既定:5、> = 0 かつ < ツール最大トルクであること。 |
最大振動数 | 既定:5、>=3 かつ <20 であること。 |
Ti – 時間
監視中の経過時間を測定し、時間制限内であることを確認します。時間の測定は、モニターの開始時に開始されるか、トリガートルクが指定されている場合は、監視中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | > = 0 かつ < ツール最大トルクであること。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TG - トルク勾配
このモニターは、勾配が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
エンドポイントチェック | [はい]に設定すると、ステップのシャットオフポイントで測定された勾配のみが制限内にあるかどうかがチェックされます。 |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最低許容トルク勾配。>= -100 であること。 |
上限 | 最大許容トルク勾配。> -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
角度オフセット | エンドポイントチェックがいいえに設定されている場合に使用できます。トリガートルクを初めて通過した後、勾配の計算が開始する角度を指定します。 |
TAW – 角度ウィンドウのトルク
このモニタは、角度ウィンドウ内のすべてのトルク値がトルク制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | > 0 であること |
ウィンドウ長さ | <= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
ウィンドウを通過した場合はNG | [はい]に設定すると、角度ウィンドウの終わりに達していない場合、このモニターのステータスはNGになります。 |
TRD – トルクレートと偏差
このステップモニターは、トルクと角度の比であるトルクレートを測定して確認します。計算されたトルクレートは、上限 と 下限 で定義されているトルクレート制限内にあることが確認されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 角度の始点のトルク。 |
開始ポイント角度 | トリガートルクで開始点の角度が測定されたら、トルクの測定が開始されます。 |
降伏ポイント角度 | トルクの測定を停止する角度点。 |
終了ポイントトルク | トルクの測定が停止されるトルク。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
限度 | > 0 であること |
Cl - クリック
クリックトルクとクリック角の結果を有効にするためのモニターです。このモニタには設定がなく、MWRのステップでのみ使用できます。
LD - 緩め検出
このモニターを使用して、トルクと方向をチェックし、STWrenchのレンチ生産ステップ戦略を使用している場合に緩めが試みられてたかどうかを確認できます。かけられたトルクが、プログラムで構成されたねじ方向と反対方向の緩め制限に対して設定された値を超えた場合、結果はNGとして報告されます。
ステップ制限
The following sections describe the step restrictions available for the PowerFocus XC Controller.
予期しない事態が発生した場合に確実に締め付けを停止させるために、マルチステップ締め付けプログラムに制限を追加することができます。マルチステッププログラムの各ステップについて、最大 4つの制限を持つことができます。
次の制限が、マルチステップ締め付けプログラムに追加されているすべてのステップに自動的に追加されています。
ステップ制限 | 適用可能なステップ |
|---|---|
ステップ制限の最大時間 | 外部結果とMWRを除くすべて |
ステップ制限の最大トルク |
|
ステップ制限の最大角度 |
|
CTh – 食違いネジ
この制限は、トルクが開始トルク (T1) を超える時点から、トルクが終了トルク (T2) を超える時点までの角度を確認します。開始トルク (T1) から測定される角度が、最大限度 (Amax) より高い場合、ツールが直ちに停止します。
トルクが終了トルク (T2) を超えると、測定された角度が最小限度 (Amin) と比較して確認されます。角度がこの制限より低い場合、ツールは直ちに停止します。
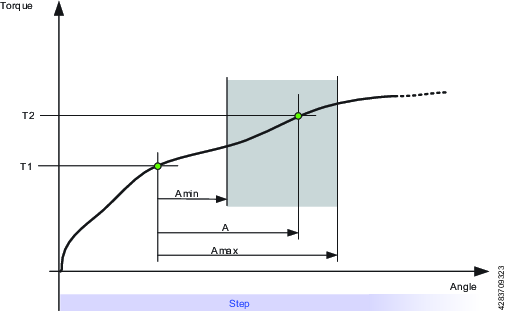
パラメータ | 説明 | 図中 |
|---|---|---|
開始トルク | <=0 であること。 | T1 |
終了トルク | <=0 であること。 | T2 |
最小限度 | 角度の下限。 | Amin |
最大限度 | 角度の上限。 | Amax |
A – 最大角度
角度を測定する制限です。測定した角度が最大限度に達すると、ツールは直ちに停止します。角度は制限の開始から測定されるか、指定されている場合は、制限中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 指定されている場合、これは角度が測定されるトルクです。 |
最大限度 | この限度に達すると、ツールは直ちに停止します。 |
T - 最大トルク
この制限はトルクをチェックします。測定したトルクが最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | トルクがこの指定された制限に達すると、ツールはすぐに停止します。 |
Ti – 最大時間
時間を確認する制限です。最大限度に達すると、ツールは直ちに停止します。
パラメータ | 説明 |
|---|---|
最大限度 | この時間が経過すると、ツールは直ちに停止します。 |
RH — リヒット
この制限はトルクをチェックします。測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムはプログラムの最後にジャンプします。マルチステップ締め付けプログラムの最初のステップにのみステップリヒット制限を追加できます。最初のステップにリヒット制限が追加されると、締め付けプログラム内の他の位置にステップを移動させることはできません。締め付けプログラムの他の位置に移動させるには、最初のステップからリヒット制限を削除する必要があります。
パラメータ | 説明 |
|---|---|
検出トルク | 測定されたトルクが検出トルクを超えた場合、ツールは直ちに停止し、プログラムはプログラムの最後にジャンプします。ゼロより大きくなければなりません。 |
RT - トルクの無効化
この制限はトルクをチェックします。測定されたトルクが制限の条件を下回ると、ツールは直ちに停止し、プログラムはプログラムの最後にジャンプします。トルクおよび角度制御プロセスにおけるトルクの無効化制限には、2つの方法があります。
パラメータ | 説明 |
|---|---|
タイプ | トルク制御プロセスまたは角度制御プロセス 。 トルク制御プロセス:トルク制御プロセスは、トルクをチェックします。この測定したトルクがトルクの無効化限度を下回るとツールは直ちに停止し、プログラムはプログラムの最後にジャンプします。制限が有効になるには、トルクはトルクの無効化限度の 110 % を超える必要があります。 角度制御プロセス:この制限は、制限中に到達した最大トルクをチェックします。制限が有効になるには、トルクがまず、トリガートルクを超える必要があります。この測定したトルクがトルクの無効化時間より長い期間最大トルクを下回るとと、ツールは直ちに停止し、プログラムはプログラムの最後にジャンプします。 ケーブルツールには角度のトルクの無効化を選択するオプションがあります。この制限は、次の2つのパラメータで制御されます:ピークトルクのパーセンテージ および トルクの無効化時間。パーセンテージは、最終ピークトルクからの下方偏移を設定し、トルク無効化時間はその偏移の期間(5~500 ms)を設定します。両方の条件(設定された期間の示されたパーセンテージ以下)が満たされる場合にのみ、プログラムが中断され、最後にジャンプします。 |
トルク限度の無効化中 | 既定:10 Nm。> 0 であること。 |
TG - トルク勾配
この制限は勾配を確認し、それが限度の範囲外の場合、ツールが直ちに停止され、プログラムはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | > 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
最小限度 | >= -100 であること。 |
最大限度 | > -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
TAW – 角度ウィンドウのトルク
この制限は、角度ウィンドウの長さの測定されたトルクがトルク制限内であることを確認します。測定されたトルクが限度範囲外の場合、ツールは直ちに停止し、プログラムは最後にジャンプします。角度ウィンドウの長さは、トルクが初めてトリガートルクを越える時点から、開始角度で開始されます。トリガートルクが設定されていない場合、開始角度は制限の開始時に開始されます。
角度ウィンドウの長さの終了に達しない場合、制限のステータスは NG になります。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
最小限度 | >= 0 であること |
最大限度 | < = 最小値であること |
TCD - トルクと電流の偏差
制限は、該当するトルクに変換されたすべての電流測定が、トルクトランスデューサで測定された実際のトルクからの差が最大偏差であることを検証します。制限は、ステップ中にトルクが初めてトリガートルクに達すると開始され、ステップがその目標に達するまで有効です。
トリガートルクに達しない場合は、モニターは OK を報告します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
最大偏差 | 既定:1、> 0であること |
PCH - パルスカウント高
パルスカウント高ステップ制限を使用する前に、次のライセンスタイプがコントローラにインストールされている必要があります。
低反力戦略
パルスカウント高は、次のツールでのみ有効です。ETV-STR61-100-13、ETV-STR61-70-13、ETV-STR61-50-10。
この制限により、パルスカウントが制限され、指定したパルスカウント上限を下回っていることが保証されます。
測定されたパルス数がパルスカウント上限を超える場合、ツールは直ちに停止し、プログラムは次の同期ポイントまたはプログラムの終了に進みます。
トルクトリガーレベルが設定されている場合、測定されたトルクがトルクトリガーレベルを超えるとすぐにチェックが開始されます。
パルスカウント高ステップ制限で締め付けステップを実行する場合は、必要なPulseDriveソケット/アダプターを使用してください。
締め付けステップが PulseDrive ソケット/アダプターなしで実行された場合、すべての締め付けがNGとなります。ステップエラー「PulseDrive ソケット/アダプターが検出されませんでした」は、PulseDrive ソケット/アダプターがないことを示します。
パラメータ | 説明 |
|---|---|
パルスカウント上限 - n+ | パルスカウント上限は、1〜9999999の範囲である必要があります。 |
トルクトリガ - Tt | トルクトリガは、0からツールの最大トルクまでの範囲である必要があります。 |
結果レポーター
結果レポーターを使用すると、選択した生成元の特定の値を結果から抽出できるようになります。結果レポーターはステップに属しますが、値を読み取るモニター/制限に関連付けられている必要があります。結果レポーターと同じステップにあるモニターまたは制限のみを選択できます。結果レポーターはドラッグ・アンド・ドロップを使用して(モニターや制限と同じ方法で)ステップに追加します。各結果レポーターは、特定の結果値(ランダウン角度、最終トルク、プリべリングトルクなど)を報告する役割を担います。
結果レポーターは以下に関連付けることが可能です:
プログラムモニター
ステップモニター
ステップ制限
各結果レポーターは、最終的な値のタイプを定義します:
最終角度
最終トルク
プリベイリングトルク
セルフタップトルク
電流
ランダウン角度
パルス数
一般パラメーター
パラメータ | 説明 |
|---|---|
生成元 | 値を生成するモニター/制限を指定します。 |
値 | 選択した生成元で表示する値を指定します。 |
制限事項:
メインパスのステップまたはプログラムモニター/プログラム制限に属するモニター/制限にのみ、結果レポーターを追加することが可能です。
タイプが異なる場合、ステップに複数のレポーターが存在する場合があります。
たとえば、すべてのステップおよびプログラムモニター角度に、タイプ最終角度の結果レポーターが存在する場合があります。
複数の結果値を持つモニター/制限において、結果レポーターのタイプが異なる場合は、複数の結果レポーターを追加する事が可能です。
ステップ中またはプログラムモニター/制限中には、同じタイプの結果レポーターが複数存在しない場合があります。
存在する最終値タイプ当たりレポートされる結果は 1 つのみです。
ルール:
結果アイテムの内部番号は、対応する結果レポーターの内部番号と同じである必要があります。
モニタ/制限の結果の内部番号は、構成内のモニタ/制限の内部番号と同じである必要があります。
ステップの結果は、実行の順序に従って順序付けする必要があります。最初に実行されるステップは最初に配置する必要があります。
モニター/制限/ステップに存在する場合、結果レポーターによって報告され得る値:
モニター/制限の測定値(浮動小数点または整数)
モニター/制限の上限と下限
ステータス
トルクトリガーと角度トリガー
角度目標とトルク目標(ステップから読み取り)
ステータスの可能な値:
低
OK
高
その他
未設定
目標値はどのステップモニターにも属さないため、目標値はモニターが属するステップから取得されます。
マルチステッププログラムの追加
締め付けメニューで、マルチステッププログラムライブラリをクリックします。
右上にあるプラスアイコンをクリックして、ポップアップウィンドウで該当するプログラムタイプ (締め付けまたは緩め) を選択します。
マルチステッププログラムの削除
締め付けメニューで、マルチステッププログラムライブラリをクリックします。
リストから、削除するマルチステップ締め付けプログラムをクリックします。
プログラムの左下で削除をクリックします。
ポップアップウィンドウではいをクリックして、選択を確認します。
マルチステッププログラムの設定
一般設定
パラメータ | 説明 |
|---|---|
タイトル | マルチステッププログラムのユーザ定義名。 |
スレッド方向 | 時計回り (CW) または反時計回り (CCW) のスレッドの方向。 |
緩めプログラム | 緩めプログラムが使用できるかどうかを示します。コントローラで使用可能な緩めプログラムのリストから選択します。 |
タイプ | 締め付けまたは緩めのプログラムのタイプ。 |
プログラム開始 | 結果を生成するためのトルクレベルを提示します。空白の場合、ツールが起動するたびに結果が生成されます。設定する場合は、結果は設定したトルクレベルからのみ生成されます。 |
プログラム終了トルク | マルチステップの締め付けを停止するトルク値を指定します。 |
プログラム終了タイムアウト | マルチステップの締め付けを停止する時間値 (秒単位) を指定します。 |
TrueAngle補正 | TrueAngle補正をオンまたはオフにします (デフォルトはオフ)。 |
アッタチメントの調整
パラメータ | 説明 |
|---|---|
アタッチメント調整を使用 | 添付ファイルのチューニングをオンまたはオフにするかどうかを選択します。 |
変速比 | 変速比値は 0.5 ~ 4.0 の間が可能です。 |
効率の調整 | 効率の調整値は0.5~1.0の間が可能です。 |
プログラムモニター
パラメータ | 説明 |
|---|---|
角度 | プログラム全体での角度監視をオンまたはオフにします。ステップでアクティブとトリガートルクを空白にすると、プログラムの開始時に角度監視が始まります。 |
ステップでアクティブ | 角度監視を有効にするステップの範囲を設定します。終了ステップが指定されていない場合、角度監視はソケット解除ステップではない、プログラムの最後のステップで終了します。 |
タイプ | 角度監視のタイプ。次から選択します。
|
トリガートルク | 角度監視のトリガートルクの値を設定します。 STB ツールでは、トリガートルクは、締め付けプログラムの実行中には締め付け方向のみにアクティブになり、緩めプログラムの実行中は緩め方向のみにアクティブになります。 |
下限 | 角度監視(プログラム)の下限を設定します。 |
上限 | 角度監視(プログラム)の上限を設定します。 |
トルク | プログラム全体でのトルク監視をオンまたはオフにします。ステップでアクティブを空白にすると、プログラムの開始時にトルク監視が始まります。 |
ステップでアクティブ | トルク監視を有効にするステップの範囲を設定します。終了ステップが指定されていない場合、トルク監視はソケット解除ステップではない、プログラムの最後のステップで終了します。 |
タイプ | 角度監視のタイプ:
|
下限 | トルク監視(プログラム)の下限を設定します。 |
上限 | トルク監視(プログラム)の上限を設定します。 |
プログラムの制限
パラメータ | 説明 |
|---|---|
最大時間限度 | 秒で設定します。この制限は、締め付けの合計時間を確認し、時間高の限度を超えると、ツールは直ちに停止します。時間は、プログラムの開始から測定されます。 |
最大トルク限度 | この制限は、トルクを確認し、測定されたトルクがトルク高の限度を超えると、ツールは直ちに停止します。 |
レポーター
これにより、ユーザーは(モニター/制限から)どの値を最終値として表示するかを選択できます。[追加]をクリックして、プログラムモニター/制限値に関連付ける結果レポーターを選択します。
パラメータ | 説明 |
|---|---|
レポーター | 結果レポーターを選択します。 |
生成元 | 値を生成するモニター/制限を選択します。 |
値 | 選択した生成元で表示する値を選択します。 |
トレース構成
トレース構成は、プログラムレベルまたは各ステップで行うことができます。デフォルトの構成はプログラムレベルで設定され、必要に応じて各ステップで上書きできます。
ここで、この機能を有効にすると、構成をプログラムレベルで実行できます。
パラメータ | 説明 |
|---|---|
ON |
|
サンプルタイプ |
|
サンプル時間 | ドロップダウンリストからサンプル時間を選択します(0.25〜1000ミリ秒) |
サンプル角度 | ドロップダウンリストからサンプル角度を選択します (0.25~20度) |
確認
パラメータ | 説明 |
|---|---|
ツール値に対する検証 | ツールがわかっている場合にはオンを使用し、最大トルクと最高速度を設定します。 ツールがわかっていない場合にはオフを使用します。 |
Tool | 検証するツールを選択するためのドロップダウン。 |
最大トルク | 検証に使用するツールの最大トルク。 |
最大速度 | 検証に使用するツールの最高速度。 |
マルチステッププログラムの作成
マルチステッププログラムを作成するには、ステップ、モニター、制限をドラッグして、締め付けエリアにドロップします。
ステップはプログラムの開始点と終了点の間にのみ配置でき、モニターと制限はステップにのみ配置できます。
機能 | 説明 | |
|---|---|---|
開始点と終了点 |  | マルチステッププログラムの開始点と終了点。すべてのステップは、この 2 つの点の間に配置する必要があります。 |
ステップの追加 |  | リストからステップをドラッグし、開始点と終了点の間の希望する場所にドロップします。 |
ステップの移動 |  | ステップをクリックしたままで、希望する場所に移動します。 |
ステッププロパティの表示 |  | ステップをクリックするとプロパティが表示されます |
ステッププロパティを閉じる |  | 締め付けエリア内をクリックすると、プロパティメニューが閉じます |
ステップの削除 |  | ステッププロパティを開いて、メニューの下部で削除をクリックします |
制限/モニターの追加 |  | リストから制限/モニターをドラッグし、適切なステップ上にドロップします。 |
制限/モニターの移動 |  | アイコン (モニターにはチェックマーク、制限には停止記号) をクリックしてドラッグし、適切なステップ上にドロップします。 |
制限/モニタープロパティの表示 |  | 制限/モニターアイコンをクリックすると、プロパティメニューが表示されます |
制限/モニタープロパティを閉じる |  | 締め付けエリア内をクリックすると、プロパティメニューが閉じます |
制限/モニターの削除 |  | 制限/モニタープロパティを開いて、メニューの下部で削除をクリックします |
ステップエラー |  | ステップで検証エラーが発生すると、そのステップがマークされます。ステッププロパティを開くと、エラーを発生させたパラメータもマークされます。 |
モニター/制限エラー |  | モニターまたは制限で検証エラーが発生すると、そのモニターまたは制限がマークされます。モニター/制限プロパティを開くと、エラーを発生させたパラメータもマークされます。 |
禁止されている配置 | 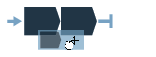 | 特定の配置 (ステップ、モニター、制限) が許可されていない場合、プレースホルダーアイコンは表示されません。 |
マルチステッププログラムツール互換性テーブル
ステップ、モニター、および制限を使用できるかどうかは、コントローラにインストールされているライセンスによって異なります。
次の表は、さまざまなツールで使用できるステップ、モニター、制限を示します。
サポートされているツール | Es | ST | STR | IxB | SR | SL(低電圧) | BCV-RE/BCP-RE | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
PFXC-Handheld | X | X | X | - | X | X | X | X | X | X | X | X |
ステップタイプ | Es | ST | STR | IxB | SR | SL(低電圧) | BCV-RE/BCP-RE | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
角度に合わせて締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
トルクに合わせて締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
トリガーリリースに合わせて締め付け | X | X | X | X | X | X | - | - | X* | - | - | - |
トルクと角度に合わせて締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
トルクと角度まで締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
DynaTork に合わせて締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
待機 | X | X | X | X | X | X | - | - | X | X | - | - |
ソケット離脱 | X | X | X | X | X | X | - | - | X | X | - | - |
デジタル入力まで実行 | X | X | X | - | X | X | - | - | - | X | - | - |
トルクまたは角度に合わせて締め付け | X | X | X | X | X | X | - | - | X | X | - | - |
角度に合わせて緩め | X | X | X | X | X | X | - | - | X | X | - | - |
トルクに合わせて緩め | X | X | X | X | X | X | - | - | X | X | - | - |
トリガーリリースに合わせて緩め | X | X | X | X | X | X | - | - | X* | - | - | - |
トルクに合わせてスレッドカット | X | X | X | X | X | X | - | - | X | X | - | - |
同期点 | - | - | - | - | - | - | - | - | - | - | - | - |
噛み合わせ | X | X | X | X | X | X | - | - | - | X | - | - |
ランダウン | X | X | X | X | X | X | - | - | - | X | - | - |
降伏に合わせて締め付け | X | X | X | X | X | X | - | - | - | X | - | - |
降伏M2に合わせて締め付け | - | - | - | - | - | - | - | - | - | X | - | - |
外部結果 | X | X | X | - | X | X | X | - | X | X | - | X |
クラッチ | - | - | - | - | - | - | X | - | - | - | - | - |
クラッチ緩め | - | - | - | - | - | - | X | - | - | - | - | - |
メカトロニックレンチ(MWR) | - | - | - | - | - | - | - | X | - | - | - | - |
トルク校正 | - | - | - | - | - | - | - | - | - | - | - | - |
レンチ生産 | - | - | - | - | - | - | - | - | - | - | X | - |
レンチ品質 | - | - | - | - | - | - | - | - | - | - | X | - |
モニター | Es | ST | STR | IxB | SR | SL(低電圧) | BCV-RE/BCP-RE | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
Time (時間) | X | X | X | X | X | X | - | - | X | X | - | - |
角度 | X | X | X | X | X | X | - | X | X | X | X | - |
ピークトルク | X | X | X | X | X | X | - | X | X | X | X | - |
シャットオフトルク | X | X | X | X | X | X | - | - | X | X | - | - |
トルクレート偏差 | X | X | X | X | X | X | - | - | - | X | - | - |
ポストスレッドカット角度 | X | X | X | X | X | X | - | - | X | X | - | - |
ポストスレッドカットピークトルク | X | X | X | X | X | X | - | - | X | X | - | - |
角度ウィンドウ内トルク | X | X | X | X | X | X | - | - | X | X | - | - |
ポストビュートルク高 | X | X | X | X | X | X | - | - | X | X | - | - |
ポストビュートルク低 | X | X | X | X | X | X | - | - | X | X | - | - |
降伏からの角度 | X | X | X | X | X | X | - | - | - | X | - | - |
スティックスリップ検出 | X | X | X | X | X | X | - | - | - | X | - | - |
プリベイリングトルク | X | X | X | X | X | X | - | - | X | X | - | - |
シャットオフ電流 | X | X | X | X | X | X | - | - | X | X | - | - |
クリック | - | - | - | - | - | - | - | X | - | - | - | - |
トルク校正 | - | - | - | - | - | - | - | - | - | - | - | - |
緩め検出 | - | - | - | - | - | - | - | - | - | - | X | - |
制限(即時停止) | Es | ST | STR | IxB | SR | SL(低電圧) | BCV-RE/BCP-RE | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
最大トルク | X | X | X | X | X | X | - | - | X | X | - | - |
最大角度 | X | X | X | X | X | X | - | - | X | X | - | - |
最大時間 | X | X | X | X | X | X | - | - | X | X | - | - |
クロススレッド | X | X | X | X | X | X | - | - | X | X | - | - |
トルク勾配 | X | X | X | X | X | X | - | - | - | X | - | - |
トルクの無効化 - トルク制御プロセス | X | X | X | X | X | X | - | - | X | X | - | - |
トルクの無効化 - 角度制御プロセス | X | X | X | X | X | X | - | - | - | X | - | - |
トルクと電流の偏差 | X | X | X | X | X | X | - | - | - | X | - | - |
角度ウィンドウ内トルク | X | X | X | X | X | X | - | - | X | X | - | - |
リヒット | X | X | X | X | X | X | - | - | X | X | - | - |
プログラムモニタータイプ | Es | ST | STR | IxB | SR | SL(低電圧) | BCV-RE/BCP-RE | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
プログラム監視角度 | X | X | X | X | X | X | - | - | X | X | - | - |
プログラム制限タイプ | Es | ST | STR | IxB | SR | SL(低電圧) | BCX | MWR | STB | QST | STW | 外部ツール |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
プログラム制限トルク高 | X | X | X | X | X | X | - | X | X | X | X | - |
プログラム制限時間高 | X | X | X | X | X | X | - | X | X | X | - | - |
* STBツールは、マルチステップの緩めまたは締め付けプログラムで、緩めをトリガーリリースステップまたは締め付けをトリガーリリースステップのみを許可します。
STB ツールとマルチステップ
ワイヤレスである STB ツールの性質のため、一部のマルチステップ機能と動作は異なる場合があります。ここに示す一般的な制限のほかに、必要な場合は、マルチステップ機能の説明に STB ツールの追加情報を示します。
プログラムの検証
すべての締め付けプログラムは、プログラムがツールにダウンロードされる前に、STB ツールとの互換性が検証されます。選択した締め付けプログラムにツールとの互換性がない場合は、ツールはロックされます。このエラーが発生すると、イベント 5030、「構成の複雑性を超えました」がトリガされます。
ツールをロック解除するには、締め付けプログラムの複雑性を低下させるか、別の締め付けプログラムを選択します。
ステップ構成の段階
コントローラ締め付けプログラムでは、プログラムを実施するためにパラメータを設定する必要があります。戦略と、目標トルクまたは目標角度のどちらかの選択は必須です。その他の設定はオプションです。さらに、トルクまたは回転角度が維持しなければならない範囲で限度を加えることで、実行中の締め付けを監視することも可能です。
締め付け手順は次の 4 つの段階に分かれます。[開始]、[ランダウン]、[締め付け]、[停止]。
この図は、一般的に説明される締め付けを示します。曲線は時間の経過に伴う速度、トルク、角度の変化を表します。すべての締め付け戦略はこのように表されます。パラメータ、監視、限度も詳細な図に示されます。
タスクは、トリガが押された時点から、締め付け目標に到達するか、エラーが発生するまでで定義されます。
締め付け戦略と特定のパラメータ設定を組み合わせることで、締め付けプログラムが作られます。
ユーザーは多数の締め付けプログラムを作成して、その 1 つを実行時に選択できます。
開始段階
オプションの [開始] ステップで、締め付けを開始し、ソケットとスレッドの検出とリヒットを検出するオプションが有効になります。
Direction (向き)
方向では、スピンドルの締め付け方向を時計回り(CW)にするか反時計回り(CCW)にするかを定義します。スピンドルの回転は、緩め時と、スリーステップ戦略で使用する調整ステップ時を除き、常にこの方向になります。
|
パラメータ |
説明 |
デフォルト値 |
|---|---|---|
|
スレッド方向 |
スピンドルの締め付け方向を定義します。 |
時計回り |
ソフトスタート
ソフトスタート中、ネジがスレッドに入るのを助け、ツールトリガを押した際にツールが所定位置から急に飛び出さないように、速度、最大トルク、回転角度の設定ができます。
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
ソフトスタート | ネジがスレッドに入るのを容易にするために、ツールの速度、角度、最大トルクの設定ができます。 オフ: ソフトスタートがオフになります。 オン: ソフトスタートがオンになります。 | オン |
速度 | ソフトスタート時の速度を定義します。 | 35 rpm |
角度 | ネジがスレッドに入るようスピンドルの回転角度を定義します。 | 90° |
最大トルク | ソフトスタート時にかかるトルク上限値を定義します。トルク最大値が超過すると、締め付けが中止され、エラーメッセージが表示されます。締め付けは NG とみなされます。 | 1.25 Nm |
リヒット検出
リヒット検出が有効になると、既に締め付けられたネジを検出できます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
リヒット検出 | 既に締め付け済みのネジが締め付けられようとしていることを検出します。
| 早期 |
電流モニタリング
現在の監視は、締め付けトルクを監視するために、特別なセキュリティを提供し、ツールのトルクセンサを補完するものです。
最終目標トルクで、回転子電流が測定され、トルク値に変換されます。計算したトルクが測定トルクの 10% 以内であれば、締め付けは、OK とみなされます。
パラメータ | 説明 | 既定 |
|---|---|---|
電流監視 | オン/オフ位置のあるスイッチ
| オフ |
Turbo Tight、Rotate、Pulsing、STwrench 戦略では、電流モニタリングは実装されていません。
TrueAngle 補正
特定のツールでは、ジャイロを備えており、締め付け時のツールの回転を測定できます。ツールが締め付け中に回転する場合、角度測定が壊れている可能性があります。角度リファレンスに合わせて行った場合、締め付けの不具合につながります。指定制限値内での変動について、コントローラーは、これらの回転を補正し、正しい締め付けを行うことができます。
ツールの回転が指定の制限外となった場合は、締め付けが中止され、結果ステータス NG がレポートされます。追加情報でツール移動超過が報告されます。
パラメータ | 説明 | 既定 |
|---|---|---|
TrueAngle 補正 | 回転を除くすべての締め付け戦略で利用可能。 クロウフットがアタッチメントとしてインストールされているツールは、パラメーターTrueAngle補正をサポートしていません。 | オン |
ツール移動制限 - 負 | TrueAngle補正がオンの場合のみ表示されます。 ツールの最大の負の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。数値角度値で表現
| 30 |
ツール移動制限 - 正 | TrueAngle補正がオンの場合のみ表示されます。 ツールの最大の正の回転を定めます。値が超過すると、締め付けが終了し、エラーがレポートされます。数値角度値で表現
| 30 |
ジャイロを備えたツールのみ、ツールの移動を測定する機能があります。
ランダウン段階
ネジがスレッドに入ってからネジヘッドが下位面に触れてスナグに達する直前までの締め付けの一部です。ランダウン時に必要なトルクはどのクランプ力にも寄与しません。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ランダウン速度 | ランダウンステップ時の速度を定義します。 | ツール最高速度 |
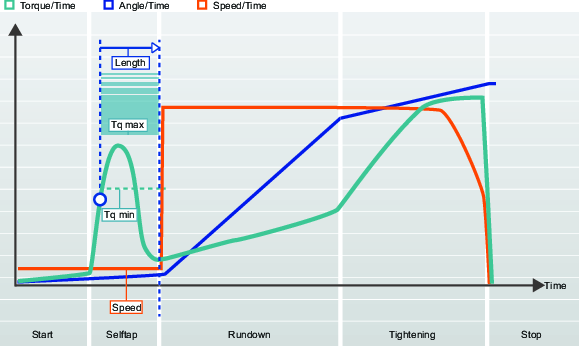
セルフタップ
セルフタップステップでは、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ボルトを用いて金属の薄層を締め付ける際の締め付けが可能になります。トルク値が SelftapTorqueMin/2 になると、セルフタップウィンドウが起動します。トルクは SelftapTorqueMin より大きくなければなりませんが、角度ウィンドウの間、SelftapTorqueMax を超えてはなりません。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
セルフタップ | セルフタップ 段階を有効にします。 | オフ |
速度 | セルフタップ 時の速度を定義します。 | ソフトスタート速度またはToolMaxSpeed の 5 % |
長さ | セルフタップ 時のソケット回転角度を定義します。開始ステップの終了から測定。 | 360° |
最小トルク | セルフタップ下限のトルク値。 | 0 Nm |
最大トルク | セルフタップ上限のトルク値 | ツール最大トルク |
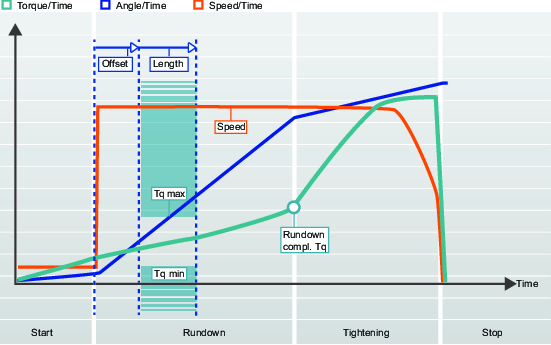
ランダウントルク制限
ナットとジョイント間の摩擦は変動する可能性があります。これにより、ジョイント面に到達する前に、ランダウンを実行するのに必要なトルクも同様に変化させる可能性があります。これらの効果は、例えば、穴の干渉、プリベリングトルクまたは潤滑の変動があります。
ナットが振動で緩むのを防止するために、プラスチック製インサートのあるロックナットを締め付ける際にランダウントルクを監視することが役立ちます。これには、干渉に対処するためのプリベリングトルクと呼ばれる高トルクが必要です。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ランダウントルク範囲 | ランダウントルクの制限を[オン]または[オフ]に設定します。 オフ: 範囲が設定されていません。 オン: トルク制限と角度間隔を設定します。 | オフ |
オフセット | 角度間隔が開始する前の角度オフセット | 0° |
長さ | ランダウントルク範囲を定義する角度 | 360° |
最小トルク | ランダウントルク下限値 | 0 Nm |
最大トルク | ランダウントルク上限値 | ターゲットトルクの 19% |
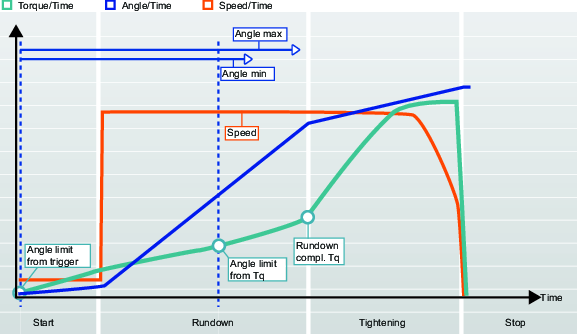
ランダウン角度制限
ランダウン中の回転角度を監視することで、ワッシャの有無、ネジサイズまたは長さが不正なネジなどのエラーを検出することができます。たとえば、スレッドが長すぎる場合、ネジが着座するまでのボルトの回転角が大きくなります。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ランダウン角度範囲 | ランダウン角度範囲を有効にします。角度範囲は、ツールトリガを押したとき、あるいは指定トルクの値に達したときについて設定します。Selftap が有効であれば、Selftrap 中に角度範囲はチェックされません。 オフ: 範囲が設定されていません。 トリガから:システムは、ツールトリガが押され、角度または時間範囲に違反していると報告があると同時に、システムが締め付け角の監視を始めます。 トルクから:システムは、指定の <From torque> 値からの締め付け角の監視を始め、角度または時間範囲に違反していることを報告します。 | オフ |
<From torque> | ランダウン角度範囲が設定されている場所からのトルク値 | ターゲットトルクの 10% |
最小角度 | 開始点からの低角度範囲の角度値 | 100° |
最大角度 | 開始点からの高角度範囲の角度値 | 1000° |
最短時間 | ステップの最短時間(ミリ秒)。ステップの開始から測定。 | 10 ms |
最長時間 | ステップの最長時間(ミリ秒)。ステップの開始から測定。 | 5000 ms |
ポストビュートルク
一部のジョイントでは、完全なランダウン前にトルクピークがあります。ポストビュートルクにより、2 つの指定角度間隔でトルク値を監視することができます。この間隔の開始は、完全なランダウン前の角度として定義され、その後、指定の角度間隔に対してトルクが監視されます。
したがって、ポストビュートルクは、最大および最小の限界を互いに独立して設けることができること、ランダウンステップの結果を良好に管理するよう長さを異ならせることができることを除き、[ランダウン] トルク限界と同様です。
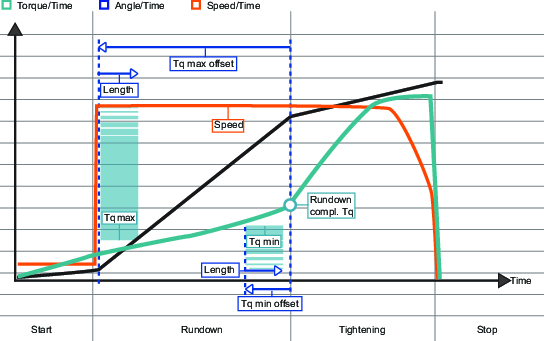
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ポストビュートルク | ポストビュートルクにより、2 つの指定角度間隔でトルク値を監視することができます。 | オフ |
最小トルク | ポストビュートルク下限のトルク値 |
|
最小トルクオフセット | ポストビュートルク最小間隔が始まる前の角度オフセット。 | 720° |
最小トルク長さ | [ポストビュー]トルク最小セクションを定義する角度長さ | 90° |
最大トルク | ポストビュートルク上限のトルク値。 |
|
最大トルクオフセット | ポストビュートルク最大間隔が始まる前の角度オフセット。 | 360° |
最大トルク長さ | [ポストビュー]トルク最大セクションを定義する角度長さ | 90° |
ランダウン完了
ランダウン完了は、ネジが着座している場合に設定します。ランダウンステップを完了し、締め付けステップに入ります。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ランダウン完了 | 着座した時点の制御方法を指定します。 トルク:ランダウンステップが完了した際のトルク値を指定します。 | トルク |
<At torque> | スナグに達してランダウンステップが完了した際のトルク値を定義します。ランダウン完了は、マルチステップ戦略の最初のトルクまたは、TurboTight 戦略の目標トルクより小さくなければなりません。 |
|
停止段階
ソケットを離すことができるよう停止段階で締め付けを終了します。
ソフトストップ
ソフトストップは人間工学的に締付け停止を行います。
不快な停止に感じられることが知られているため、50~300ミリ秒の時間間隔でツールを停止しないでください。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ソフトストップ | ソフトストップのオンとオフを切り替えます。
| オフ |
ネジの緩め
緩めパラメータを設定すると、特定の締め付けプログラムの緩め動作を制御できます。どのツールを使うかに関係なく、ネジスレッドが壊れないように、必要に応じてネジを確実に緩めるように緩め速度とトルクを指定します。
ランアップトルクに達すれば、緩めは OK とみなされます。ただし、そのときまでにネジはおそらく完全にランアップされません。ここでネジは、低トルクを使って回すことができ、速度を向上させることができます。オペレータは、終了したとみなされるまで、緩めを続行する必要があります。
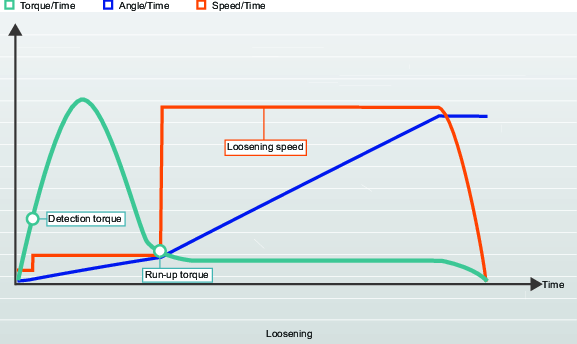
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
検出トルク | 緩め操作を開始して緩めの結果をもたらすために必要な最小トルク。 | 7% ToolMaxTorque |
ランアップトルク | トルクがランアップトルクを下回ると、緩みは[OK]とみなされます。 注記!ネジ長の変化に応じて、システムは、ネジがいつ完全にランアップされたかは判断できません。オペレータがこれを決定しなければなりません。 | 3.5% ToolMaxTorque |
緩め速度 | 緩め速度は、ランアップトルクに達すれば得られる。 | ToolMaxSpeed |
ステージパラメーターの説明
目標トルク制限
ターゲットトルク制限値を設定すると、最終トルクが指定トルク範囲内にならない場合に締め付けを破棄することができます。トルクが高すぎると、降伏点を超えてボルトが変形し、場合によっては破損し、ネジのストリッピングに至る可能性があります。トルクが不十分であると、ジョイントの設計力に耐える十分なクランプ力にならないことがあります。
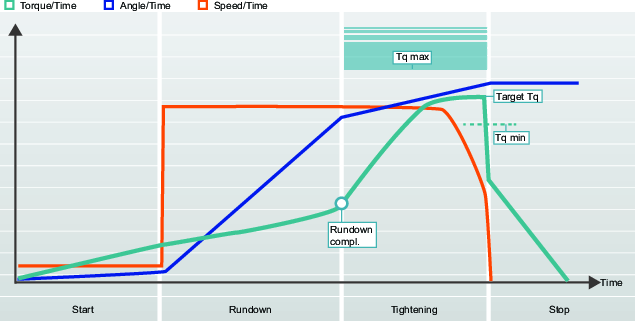
パラメータ | 説明 | デフォルト値 |
|---|---|---|
トルク限度 | トルクの結果が最小トルクと最大トルクで定義された範囲外にある場合、締め付けは NOK とみなされます。 自動:トルク範囲は、最小トルクと最大トルクで指定されたデフォルト値に自動的に設定されます。 手動:トルク制限値が手動で設定できるようになります。 | 自動 |
最小トルク | 低トルク範囲のトルク値手動が選択されている場合に入力できます。 | ターゲットトルクの 95% |
最大トルク | 高トルク範囲のトルク値手動が選択されている場合に入力できます。 | ターゲットトルクの 120% |
パラメータ測定トルクは別の値にすることができます。デフォルトで、トルクは、トルクピークで測定されます。パラメーターの可能な値は、以下の表に記載されています。
名前 | 説明 |
|---|---|
最大トルク値 | 締め付け時の最大トルク値を測定します。 |
ピーク角度時の値 | 最大角度値でのトルク値を測定します。 |
シャットオフ時の値 | ブレークステップに入る前に、最後のトルク値を測定します。 |
目標角度制限
ターゲット角度限度が設定されていると、締め付け時にナットが必要角度回転されているかを監視できます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
角度限界 | 角度を監視する締め付けセクションを度で選択します。
| オフ |
<From torque> | 角度範囲が設定されている場所からのトルク値 |
|
<From torque> | 角度範囲が設定されている場所からのトルク値 | ターゲットトルクの 75% |
最小角度 | 低角度範囲の角度値 | 90° |
最大角度 | 高角度範囲の角度値 | 720° |
最短時間 | ステップの最短時間(ミリ秒)。ステップの開始から測定。 | 10 ms TurboTight の場合:0 ms |
最長時間 | ステップの最長時間(ミリ秒)。ステップの開始から測定。 | 1000 ms TurboTight の場合:40 ms |
ターゲットがトルクであれば、位置 1 ~ 4 が有効です。ターゲットが角度であれば、位置 5 ~ 6 が有効です。
パラメーター測定角度は別の値にすることができます。使用する締め付けプログラムに対して角度監視をオンにすると、パラメーターのみ使用可能になります。デフォルトでは、角度は最大角度値で測定されます。パラメーターの可能な値は、以下の表に記載されています。
名前 | 説明 |
|---|---|
ピークトルク時の値 | 最大トルク値で角度を測定します。 |
最大角度値 | 締め付け時の最大角度を測定します。 |
シャットオフ時の値 | ブレークステップに入る前に、最後の角度値を測定します。 |
トルク補正
トルク補正を使うと、ジョイントにかかる実際のクランプ力がより良好に求められ、ジョイントにかかるクランプ力のばらつきを低減することができます。
トルク補正点は、ランダウン完了から指定角度を再度参照し、ランダウン時に用いるトルクの値を計算することで設定されます。次に、ターゲットトルクにトルク補正点で計算したトルク値を追加して、ネジ内のプレロード作成時に補正されます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
トルク補正 | ランダウンステップで使用するトルクに対してターゲットトルクを調整できるようになります。 オフ: 補正が行われていません。 オン: トルク補正点を手動で設定します。 | オフ |
残留トルクの相関係数
[残留] トルクの相関係数の用語は、較正と同様であり、電気ツールで測定する動的トルクと制御ツールで測定する残留トルク間で調整します。
残留トルク相関係数は、TurboTight戦略とTensoPulse締め付け戦略を実行するすべてのツールで使用できます。コントローラーがサポートしているバッテリーパルスツールでも使用できます。
100 とは異なる残留トルクの相関係数を用いる場合、報告される最終トルクは、ツール変換器で測定する動的トルクではありません。
動的トルク測定では、常にトルクを測定する内部トルク変換器を使用します。目標トルクに達すると、ツールが停止し、その結果は評価され、報告されます。変換器で測定された最終トルクは、ジョイントの状態、ツール速度、ギアおよびソケットの影響を受けます。
締め付けが完了した後に残留トルクを測定します。これは、より高いレベルに締め付けを継続するか、再起動するのに必要なトルクです。残留トルクは、ジョイント内のクランプ力を決定します。
動的トルク測定は、非常に反復的ですが、ツールタイプとツール速度間で異なる場合があります。 | ハンドヘルド較正済みトルクレンチにより、残留トルクを高精度で測定しますが、ジョイントの緩み、トルク減衰、摩擦やオペレーターの技術により大きな変動があります。 |
残留トルクの相関係数は、動的トルクと残留トルク間の補正です。この係数は、実験によって決定する必要があります。選択した締め付けプログラムが数回行われ、動的トルクが記録されます。締め付けは手動でも測定され、残留トルクを決定します。

残留トルクの相関係数は、動的トルクにより残留トルクを除することで計算できます。残留トルクの相関係数は、パーセントで示され、デフォルトでは 100% です。つまり、報告される動的トルク値は変更されていません。
パラメーター | 機能 |
|---|---|
ターゲットトルク | TurboTight 戦略を使用した締め付けに対するツールの目標トルクが設定されます。 |
最終動的トルク | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 動的トルクは、基準変換器によって測定します。 |
残留トルク | 必要なクランプ力を確実に得るために必要な残留トルクです。 |
残留トルクの相関係数 | 残留トルクと動的トルクの間の補正係数 |
トルク調整使用方法の例:
TurboTight 戦略を選択します。ジョイントは、必要なクランプ力に達するように、12 Nm まで締め付けなければなりません。以下のセットアップを行います:
設定例 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた必要な目標トルク |
残留トルクの相関係数 | 100 | 残留トルクと動的トルクの間の補正係数 |
複数の締め付けを行います。締め付け毎に、較正済みトルクレンチでジョイントを確認します。平均値を算出し、以下の結果が得られました。
初期パラメーターと結果 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた目標トルク |
Final torque (最終トルク) | 12 Nm | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 12 Nm | ツール変換器からの未補正測定トルク。 |
残留トルク | 10 Nm | 較正済みトルクレンチまたは他のテストツールで測定した残留トルク。 |
残留トルクの相関係数 | 100 % | 残留トルクと動的トルクの間の補正係数 |
テストにより、必要なクランプ力を発生させるには残留トルクが低すぎることが示されています。残留トルクの相関係数は、0.83(83%)と計算されます。調整係数の調整が行われ、次の結果が得られます。
最終パラメーターと結果 | 値 | 機能 |
|---|---|---|
ターゲットトルク | 12 Nm | コントローラー内のプログラムされた目標トルク |
Final torque (最終トルク) | 12 Nm | 最終トルクが、締め付け実施の結果として報告されます。 |
動的トルク | 14.5 Nm | ツール変換器からの未補正測定トルク。 |
残留トルク | 12 Nm | 必要なクランプ力を確実に得るために必要な残留トルクです。 |
残留トルクの相関係数 | 83 % | 残留トルクと動的トルクの間の補正係数 |
これは、差異を補正してジョイントの必要目標に達するのに、指定の目標よりも若干多めに締め付ける必要があることを意味します。
相関を、生産で使用するのと同じツールタイプおよびパラメーター較正で行うことが重要です。
トリガー喪失
プログラム締め付け段階の[結果評価]ウィンドウの、[トリガー喪失時にNG] スイッチは、目標条件に達する前にツールトリガーを解放できるかどうかを制御します。設定はオンまたはオフに設定することができます。以下に 2 つの状態の説明を示します。
スイッチ設定 | 説明 |
|---|---|
オン | ターゲット条件に達する前にトリガーを解放すると、NOK 締め付けになります。 |
オフ | ターゲット条件に達する前にトリガーを解放すると、他の全ての条件が満たされている限り、OK 締め付けになります。 |
デフォルトの動作は、早期のトリガー解放が認められないというものです。
可用性
トリガー喪失でのNGは、以下の締め付け戦略で利用できます:回転、クイックステップ、2ステップ、3ステップ、インパルス - シングルステップ。
締め付け戦略の回転、クイックステップ、2ステップ、3ステップの場合、[トリガー喪失]設定は、プログラムの目標が(トルクではなく)角度に設定されている場合にのみ使用できます。
締め付けプログラム構成 - 一般パラメータ
セクションにかかわらず締め付けプログラムを変更するには、GUIの右下隅にある[適用]ボタンをクリックして、適用を確定する必要があります。または、同じ場所にある[元に戻す]ボタンをクリックすると、元に戻すことができます。
変更したセクションから(戻る、ホーム、または結果ボタンを使用して)出る場合、変更を適用または元に戻すことができる警告ポップアップが表示されます。ユーザーは変更を適用または元に戻すことなく、先に進めることはできません。
一般的な締め付けプログラム設定を使用して、ユーザーは、締め付けプログラムに名前をつけることで締め付けプログラムをセットアップして管理し、締め付け戦略、[手動] または [クイックプログラム] モードの選択といった一般的な締め付け設定を行い、締め付けプログラムターゲット値を設定できます。
締め付けパラメータの詳細については、「開始ステージ」、「ランダウンステージ」、「締め付け戦略」、「停止ステージ」を参照してください。
緩みパラメータの詳細については、「ねじを緩める」を参照してください。
本セクション内
名前
名前フィールドを使って、締め付けプログラムに名前を付けます。この名前は、締め付け結果とともに保存され、ToolsNet に送られます(該当する場合)。名前の長さは最大 32 文字までで指定できます。
戦略
戦略では、締め付けプログラムとともに使用する締め付け戦略を設定します。
使用可能な戦略と関連パラメータの詳細については、「締め付け戦略」を参照してください。
目標
クイックステップ、ツーステップ、スリーステップの戦略により、ターゲットトルクかターゲット角度の値のいずれかに向けて締め付けの選択が可能になります。TurboTight がアクティブになった場合のみ、ターゲットトルクオプションが利用できます。
時間監視(経過時間)
時間監視は、回転を除くすべての締め付け戦略で利用可能です。角度制限がアクティブ化されたときに、時間監視はアクティブ化できます。時間監視は、ランダウンステップと締め付けステップの最終ステップで利用可能です。
TurboTight 締め付け戦略を使用する際に締め付け終了時における予期しない飛び出しのリスクを最小化するために、[時間] 監視を有効にしてください。
トレースの扱いには時間がかかるため、[経過時間] ステップに対してプログラム経過時間で常に短時間の違いがあります。これは、1 ステップのみを含むプログラムで特に顕著です。
すべての監視オプションがオンであれば、STB ツールを使用している際に時間監視は使用できません。
アッタチメントの調整
アタッチメント調整では、ツールでフロントアタッチメントを補正することができます。補正は、各締め付けプログラムに対して行うことができます。
オペレーターは、アタッチメントをホットスワップしてから、その特定のアタッチメントに対して調整した締め付けプログラムを選択することができます。
アタッチメントの調整は、ST レンチを除くすべての従来の戦略で利用可能です。
締め付けプログラムの設定で、アタッチメント調整有効をはいに設定します
締め付けパラメーター > 編集をクリックします
開始ステップをクリックします。
アッタチメントの調整で、アタッチメント調整を使用をはいに設定します
ギア比と効率の調整(下表参照)の必要なパラメーターを設定します。
|
アッタチメントの調整 |
説明 |
デフォルト |
|---|---|---|
|
アタッチメントギア比 |
アタッチメントギア比は、角度を補正するために必要です。 最小:0.5 最大:3.6 ソケット回転速度 = ツール速度/ギア比 |
1.0 |
|
効率の調整 |
効率の調整と組み合わせたアタッチメントのギア比は、トルクを補正するために必要です。 最小:0.5 最大:1.0 例えば、0.9 は 10% の効率の損失を意味します。 |
1.0 |
[バッチシーケンス]タブの使用
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
バッチシーケンスは、所定の順序で特定の締め付け数を実施するために使用します。各バッチシーケンスには名前が与えられます。
本セクション内
バッチシーケンス設定
バッチシーケンスは、最大250の締め付けのバッチサイズをもつ最大99バッチで構成できます。バッチシーケンスのバッチは、正リストで表示した順番に、あるいはソケットセレクターを使ってどのバッチを実行するかを決めて実行します。
パラメーター名 | 説明 | デフォルト値 |
|---|---|---|
バッチシーケンスロックツール完了。 | バッチシーケンスカウンタがバッチシーケンスのサイズに等しくなると、バッチシーケンスは完了します。 オン: このツールはロックされており、締め付けを続けるには、締め付けプログラムまたはバッチシーケンスを選択する必要があります。 オフ: 完了後、バッチシーケンスを繰り返す準備ができています。 | オン |
自由な順序 | いいえ:設定したバッチは、締め付けを実施するよう設定されていれば、リストで表示した順序で実行されます。ソケットが指定されている場合、バッチを実施する際に、ソケットに対してシステムがプロンプト表示します。 はい:設定したバッチは、任意の順序で実行できます。オペレーターは、ソケットセレクターを使用してどのバッチを実行するかシステムに示す必要があります。 すべてのジョイントが完了するとバッチが完了したとみなされます。 | なし |
NG で増加 | 締め付けが NG として報告されていても、バッチカウンタ値を増やすことが可能になります。動作する最大の連続 NG(シングルボルトが締め付けできる最大回数)については、NG の増分をいいえに設定する必要があります。このパラメーターを [はい] に設定すると、シーケンスを次の締め付けに移動することができます。 | なし |
最大連続 NG | 最大連続 Not OK 締め付け(NG)は、バッチ内の連続 NG 所定最大許容締め付け数です。最大連続NG数に達すると、イベントNG締め付けが多すぎます(4020)が表示されます。 | 0 |
緩め時の減少 | 現在有効なバッチでのカウンタを減少します。完成したバッチを減少することはできません。 一度も見ない:設定はオフです。有効なバッチで緩めを行う際に、カウンタは減少しません。 常に: 緩めが実行されるとき、バッチカウンタは減少します。 前回の締め付けが OK だった場合:前回の締め付けがOKであった場合、緩めが実行されるとき、バッチカウンタは減少します。 | 一度も見ない |
シーケンス中止タイマー | オン: 選択したバッチシーケンスは、指定した制限時間内に中止できます オフ: 選択したバッチシーケンスを中止することは、できません。 | オフ |
中止時間(10〜600) | 選択したバッチシーケンスを中止することができる秒数。 | 10 |
バッチ構成
同じ締め付けプログラムを使用して指定数の連続締め付けを実施するようバッチを設定します。バッチには、実行するために指定した締め付けプログラムとバッチサイズがなければなりません。
パラメータ | 説明 |
|---|---|
締め付けプログラム | バッチで使用する締め付けプログラム。 |
バッチサイズ | バッチが実施する締め付け数 バッチ内の最大締め付け数は250です。 バッチサイズ 0 は、バッチに無制限の回数の締め付けを行います。 |
ID 番号 | ソケットセレクターを使用する場合、これは、バッチを有効にするのに用いられるソケット位置です。 |
[ソース]タブの使用
締め付けのためのタスクとして使用される外部信号は、ソースメニューで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは類似品です。2 つのタイプのソースタスクがあります。
ソース締め付けタスク
ソースバッチタスク
ソース締め付けは、単一の締め付けプログラムを選択するのに使用します。
ソースバッチは、一連の締め付けプログラムであるバッチシーケンスを選択するのに使用します。
タスクの選択の詳細については、「仮想ステーションへのタスクの割り当て」を参照してください。
本セクション内
ソース締め付け
締め付けメニューがソース締め付け構成のリストを示します。別のリストを仮想ステーションにリンクするには、目的の[仮想ステーション]に移動して、[タスクプロパティ] で [選択] を選択します。ここで、ソースを作業として選択することができます。ソース締め付けでは、特定の締め付けプログラムを指定子番号にリンクします。識別子番号を(外部デジタル信号により、あるいはソケットセレクターが使用される場合は、セレクターの対応ソケットを持ち上げることで)コントローラーに送ると、リンクされたプログラムは、異なる信号が送られる(またはソケットがピックアップされる)まで何度も実行されます。バッチカウントはありません。
ソース締め付けリストは、コントロールまたは確認モードのいずれかで設定できます。
コントロールに設定すると、外部ソースでは、識別子番号を要求することで締め付けプログラムを選択します。ソケットセレクターの場合、識別子番号は、ソケットセレクターの対応するソケットにリンクされ、ソケットを持ち上げると、締め付けプログラムが選択されます。
確認モードでは、ソケットセレクターは、管理ソースとして使用することができません。このモードで、識別子番号は、締め付けプログラムと特定のソケット(リスト内の追加列で表示)の両方にリンクされます。識別子番号が(外部信号により)要求されると、対応するソケットは、ソケットセレクターでダイアログを表示され、オペレーターがソケットを持ち上げると(他のソケットは無効)、締め付けプログラムが有効になります。ソケットが指定されない場合(つまり、ソケットコラムで 0 に設定されている場合)、締め付けプログラムが直接起動され、ソケットの状態は無視されます。
Power Focus XCPower Focus XC can store up to 1,000 source tightening programs.
本セクション内
ソース締め付けの作成
セクションにかかわらず締め付けプログラムを変更するには、GUIの右下隅にある[適用]ボタンをクリックして、適用を確定する必要があります。または、同じ場所にある[元に戻す]ボタンをクリックすると、元に戻すことができます。
変更したセクションから(戻る、ホーム、または結果ボタンを使用して)出る場合、変更を適用または元に戻すことができる警告ポップアップが表示されます。ユーザーは変更を適用または元に戻すことなく、先に進めることはできません。
ソースメニューに移動し、その後、左側のナビゲーションの締め付けを選択します。
ワークスペースの右上のプラスアイコンをクリックします。
ソース締め付けに名前を与え、正しいセレクターモード(必要とされる内容に応じて、管理または確認)を選択します。
既定では、新しいソース締め付けを作成する際に、編集可能な識別子番号は一つしか利用できません。画面の下部で、プラスアイコンをクリックして、さらに追加します。
すべての項目に識別子番号を付けます
ソケットセレクターが使用される場合、識別子番号は、ソケットセレクターの位置に対応します。すなわち、識別子番号 1 はソケットセレクターのソケット番号 1 に対応します。
プログラムをクリックして、締め付けプログラムのリストから選択することで、各識別子番号にリンクする締め付けプログラムを選択します。
ソース - 最大連続NG
最大連続NGは、ソース締め付けごと、またはソース締め付けに含まれる個々のプログラムごとに設定できます。
ソース締め付けごとの最大連続NGの設定
プログラムごとの最大連続NGをいいえに設定する
最大連続NGフィールドに値を設定します。
プログラムごとの最大連続NGの設定
プログラムごとの最大連続NGをはいに設定する
[識別子セレクタ構成] セクションのすべてのプログラムに対して、[最大 NG] 列に値を設定します。
ソースバッチシーケンス
ソースバッチ構成は、ソースメニューのバッチオプションにあります。
コントローラーは、識別子号または識別子文字列のいずれかに基づいて、バッチシーケンスを選択するように構成できます。

入力 | 説明 |
|---|---|
ID 番号 | この番号は、アクセサリーから、または外部の制御エンティティからくる正の整数でなければなりません。 |
識別子文字列 | この文字列は、ASCII 文字セットで構成され、スキャナーから、または外部の制御エンティティからことがあります。 |
ソースバッチの作成
ソースメニューに移動し、その後、左側のナビゲーションのバッチシーケンスを選択します。
ワークスペースの右上のプラスアイコンをクリックします。
ソースバッチに名前を付けます
新規識別子文字列のスキャンで前のスキャンを中止しなければならない場合は、新規識別子を中止をはいに設定します。
識別子の方法(テキストの文字列、または数値文字列の数)を選択します
文字列を任意の順序でスキャンできるようにするには、自由な順序をオンに設定します。
識別子文字列は、最大 4 つの異なる文字列で構成することができます。自由な順序をいいえに設定すると、文字列がシステムに認識されるには、文字列が特定の順序でスキャンされる必要があります。
必要であれば、識別子文字列構成セクションでプラスアイコンをクリックして、識別子文字列を追加します。
(ポップアップウィンドウの)プロパティを変更する識別子文字列の名前ラベルをクリックします。次のプロパティが、各文字列に指定できます。
名前 - 文字列の名前
長さ - 文字列の長さ文字列連結の詳細については、識別子文字列の組み合わせを参照してください。
有効位置を用いて、事前に定義した文字列と一致するよう文字列を組み合わせた際にバーコードの文字列でどの文字を読み込むかを指定します。有効位置の数は、事前に定義した文字列の文字数と一致する必要があります。
保存位置 - ソースバッチで使用される各文字列のどの部分が保存され、ログでどのように表示されるかを表示します。このフィールドで、保存する必要のある文字列の位置を示します。位置は、完全な文字列の部分のみで構成できます。フィールドが空のままの場合、全(連結)文字列が保存されます。以下の表は、保存された位置の組み合わせのいくつかの例を示します。
保存位置の値はカンマ区切り(スペースなし)であり、範囲はハイフンを使用して示されます。
識別子文字列
位置
文字列 1:1234567
1-7
文字列 2:abcdef
8-13
文字列 3:GHIJKL
14-19
文字列 4:890
20-22
保存位置の例 保存位置
保存された結果
(空き)
1234567abcdefGHIJKL890
1-3,9,11,15,20-22
123bdH890
8-12,1-7,19,20-21 は 1-12,19-21 に自動的に変更1-12,19-21
1234567abcdeL89
文字列プロパティウィンドウの ID フィールドは変更できませんが、文字列間の移動にのみ使用できます。
自由な順序をオンに設定して、文字列間で長さが重複するとエラーが発生する場合があります。この場合、締め付けプログラムにスキャンされる順序はアクティブになりません。このエラーを解決するには、自由な順序をオフに設定するか、文字列の長さを調整します。
編集をクリックします。
編集ウィンドウで、どの文字列(文字列の内容列)がどのバッチシーケンス(アクティブ化列)にリンクされなければならないかを示します。さらに文字列を追加するには、下部のプラスアイコンをクリックします。
「文字列の内容」の入力には、ワイルドカードが使用できます。ワイルドカードは文字列の任意の位置で使用できます。あいまいな一致結果には、バッチシーケンスはアクティブになりません。
ワイルドカードは「.」(ピリオド)です。
バーコード文字列を読み込む有効位置の構成
バーコード文字列の位置は、1~1024 の間の数に関連します。文字列の最初の位置は 1 であり、最後は 1024 です。
説明 | 有効位置 | 有効な構成 | 事前に定義した文字列と一致するバーコードの文字列 |
|---|---|---|---|
重要な位置の順序 | 1,2,3,7,8 | Ok | ABCGH |
重要な位置の任意の順序 | 7,1,2,3,8 | Ok | GABCH |
番号の範囲 | 1–3,7-8 | Ok | ABCGH |
識別子文字列の組み合わせ
マッチングで使用する識別子文字列は、工場管理システムから最大 4 文字列、または 1 つの文字列に組み合わせる必要がある最大 4 スキャナ入力の組み合わせです。
追加および削除コマンドボタンは、組み合わせる文字列の数を管理します。次のパラメーターが使用できます。
パラメータ | 説明 |
|---|---|
タイトル | 文字列には名前が与えられなければなりません。 |
長さ | 文字列の長さはわかっていなければならず、入力する必要があります。これは、正しい文字列識別子を組み合わせることができる上で重要です。 |
有効位置 | 照合で使用される合成文字列の(ハイフンで区切られた)カンマ区切り位置または範囲。 |
保存位置 | 結果に保存される文字列のカンマで区切られた位置または範囲。 |
複数の識別子文字列を使用する場合、次の段階を実施します。
新しいエントリをテーブルに作成するには、追加コマンドボタンを押します。
文字列に名前を付けます。
文字列の長さを入力します。
追加する文字列全てに段階 1 ~ 3 を繰り返します。最大 4 つの文字列を組み合わせることができます。
各行のスタートエンドパラメーターは、マッチングプロセスの次の段階で使用する組み合わせ文字列識別子のここの文字列位置を定義します。
Performing a task selection process using an identifier string as an input:
Define which positions in the string are to be activated.
識別子文字列のどの位置をマッチングで使用するかを定義するには、有意な位置を入力します。これらの位置は、カンマで区切られているか、範囲で指定されるかのいずれかである必要があります。
[ツール]タブの使用
情報を表示するには、ツールをツールメニューのコントローラに接続する必要があります。
ツール情報
ツール情報表示には、サービス担当者が適切なヘルプとサポートを与える、あるいはどのツールがコントローラーに接続されているかをオペレータが確認できるように、コントローラーに接続されているツールに関する正確な情報をサービス担当者に与えるために使用される情報が含まれています。
情報 | 説明 |
|---|---|
型式 | ツールモデル名 |
最大トルク | ツールが締め付けで使用できる最大トルク。 |
最小速度 | ツールの最小回転速度。 |
最大速度 | ツールの最高回転速度。 |
最小最終速度 | ツールの最小最終回転速度(BCP / BCV-REツールのみ)。 |
最大最終速度 | ツールの最大最終回転速度(BCP / BCV-REツールのみ)。 |
変速比 | 出力ギヤの角速度に対する入力ギヤの角速度の比率 |
シリアル番号 | 正しいスペアパーツやサービス指示を得るために正しいバージョンの製品指示が必要な場合、ツールのシリアル番号が必要になることがあります。 |
ソフトウェアバージョン | ツールソフトウェアバージョン |
製品番号 | ツールの製品番号またはオーダー番号 |
ツールTAG情報
このツールTAG情報は、ツールタイプが STwrenchである場合のみ使用可能です。
情報 | 説明 |
|---|---|
TAG ID | エンドフィッティングツール(ソケット)にプログラムされるプログラム可能な RFID TAG識別番号。 |
トルク補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、最新バージョンの STWrench ユーザーガイド (印刷物番号 9836 4134 01) を参照してください。 パラメーターは、エンドフィッティングツールの RFID TAGに保存されます。 |
角度補正係数 | 場合によっては、アプリケーションに適合するために拡張子が必要かもしれません。この場合、レンチ測定は、正しい値を表示するように補正しなければなりません。 補正係数を計算するには、最新バージョンの STWrench ユーザーガイド (印刷物番号 9836 4134 01) を参照してください。 パラメーターは、エンドフィッティングツールの RFID TAGに保存されます。 |
公称トルク | STwrenchのsmartHEADにはトルクトランスデューサーが搭載されており、レンチの公称トルクを定義します。詳細情報については、最新バージョンの STWrench ユーザーガイド (印刷物番号 9836 4134 01) を参照してください。 |
ツールの接続
ツールの接続領域は、ツールが接続されているバーチャルステーションがどれかを示しています。
ツール正常性
正常性ビューには、ツール温度に関する情報が含まれています。
ツール温度
ツール温度(ケーブル接続ツールとバッテリツールの両方)は、Power Focus XCPower Focus XC によって継続的に監視されます。サポートされる温度単位は、摂氏(℃)華氏(°F)ですが、摂氏がデフォルトの単位です。コントローラーの再起動は必要とせずに、2 つの単位間で切り替えることが可能です。ールのモーター温度やツール電子機器温度が最高温度を超えると、ツールがロックされ、警告(2014)が表示されます。このツールは、ツール温度が温度制限を下回ったときに再びロック解除されます。
ツール温度は、STwrenchツールでは表示されません。
ツール温度のモニタリング
ディスプレイから、または Web GUI を通して、ユーザーは、測定が行われる際のタイムスタンプとともに測定された最新の電子機器/ツールモーター温度にアクセスすることができます。
ホームビューで、[ツール]タブをタップします。
ツールエレクトロニクス温度とツールモーター温度の両方が [正常性] の下に表示されます。
パルスツールについては、ツールパルスユニットの温度も表示されます。ピーク温度とそのタイムスタンプのリストにアクセスするには、いずれかのエントリをクリックします。
ツールメンテナンス
このツールは、サービス間隔数を保存し、ツールのメンテナンスまたはサービスが必要になる前に締め付けを何回実行することができるかをカウントします。
メンテナンスアラームの設定
ホームビューで、[設定]タブをタップし、[ツール]を選択します。
[サービスインジケーターアラーム]を[オン]に設定します。
ホームビューに戻り、[ツール]タブをタップして、アラームを設定するツールを選択します。
[サービス間隔] ボックスに値を入力します。
サービス間隔は 10,000 の倍数でのみ設定できます。10,000 の倍数以外の数は、10,000 の最も近い倍数に四捨五入されます。
パルスツールで作業する場合、締め付け回数とパルス数の両方に対してサービス間隔が設定されます。いずれか最初に到達した間隔で、アラームをトリガします。
フィールド | 説明 |
|---|---|
最後の点検 | 最後の点検が実施された日時。最後のサービス日付は、修理工場で設定されます。最後のサービス日は、サービスカウントのリセットボタンが押された時点の現在の日時に設定されます。 |
サービスでの総締め付け数 | 最初にツールが使用されてから、ツールが行った締め付けの合計数。この値は、サービスで利用可能になり、次のサービスまで同じままです。 |
残りの締め付け数 | サービス間隔に達するまでの残りの合計締め付け回数 |
サービス間隔 | 2 つのサービスイベント間に実施される締め付け回数。10,000 の倍数で設定できます。 |
サービスでの総パルス数 | [パルスツールのみ] 最初にツールが使用されてから、ツールが行ったパルスの合計数。この値は、サービスで利用可能になり、次のサービスまで同じままです。 |
残りのパルス | [パルスツールのみ] サービス間隔に達するまでの残りの合計パルス数 |
サービス間隔 | [パルスツールのみ] 2 つのサービスイベント間に実施されるパルス数。10,000 の倍数で設定できます。 |
サービスカウンタをリセットします。 | 残りの締め付けカウンタをリセットし、最後のサービス日を現在の日付に設定します。 |
サービスデータのリセット | [パルスツールのみ] 残りの締め付けカウンターと油の状態をリセットし、最終サービス日を現在の日付に設定します。 |
ツールの校正
ツール校正は、ツールが基準トランスデューサにどの程度対応するかを管理するために使用されます。
ツールメモリに保存されている校正値を使って、正しいトルク値がコントローラで表示されるようツールのトルクトランスデューサで示されるトルク値を調整します。コントローラは、ツールが最後に校正された日付を表示します。
フィールド | 説明 |
|---|---|
最終校正 | 最後の校正が実施された日時。 |
校正値 | 校正対象のトルク値。 |
次の校正日 | このツールの次の校正が必要となる日。 |
校正の準備
ツールとコントローラが締め付けを実施するよう設定されていることを確認してください。
STa6000、STpad または JSB Bench などのトルク基準トランスデューサを使ってツールを設定します。
セットアップの説明については、トルク基準トランスデューサのユーザーガイドをご参照ください。
ツールで通常使用する締め付けに対応するターゲットトルクの締め付けプログラムを選択します。
適切な締め付けプログラムの設定と有効化に関するチュートリアルについては、基本的締め付け設定をご参照ください。
ツールの校正
ツールで使用する校正値は、以下の式により、コントローラとトルク基準トランスデューサのトルク測定値から計算します。
新しい校正値 = 前の校正値 x 平均(基準値/Power Focus値)
ホームビューで、[ツール]タブをタップし、校正するツールを選択します。次に、[校正] に移動します。
校正値テキストボックスにある古い校正値を書き留めます。
少なくとも 3 つの締め付けを行い、平均トルク値を算出するためにコントローラと基準トランスデューサ(ACTA など)から読み取ったトルク値を使用します。
新しい校正値の式を使用して新しい校正値を計算します。
校正値テキストボックスに算出した値を入力し、適用するをタップしてツールメモリに新しい校正値を保存します。
校正が完了したら、締め付けを行って新しい値が正しいことを確認します。
QA 較正
On the home view, go to the Tool tab and select QA Calibration on the left pane.
Modify the parameters on the QA Calibration window and select Apply to implement the changes.
パラメータ
説明
有効
オン: 外部ツール構成オプションを有効化します。
オフ: 外部ツール構成オプションを無効化します。
仮想ステーション
Select the ellipsis icon to connect the tool to a virtual station.
接続タイプ:
TCP ポートから接続
または
COM ポートから接続
COM ポート
接続タイプCOM ポートが選択されていると、目に見えます。
利用可能なCOM ポートでドロップダウンリストを示します。
TCP ポート
接続タイプTCPポートが選択されていると、目に見えます。
前もって設置されているTCPポートを示します。
STa6000 または STpad を介したツール校正
STa6000/STpad の接続
STa6000/STpad は、次の2通りの方法でコントローラに接続できます。
STa6000 の接続
接続 | 備考 |
|---|---|
COM ポート | ACTA シリアルケーブルを使用して、Atlas Copco の USB 対シリアルアダプタをコントローラの USB ポートに接続します。USB ケーブルを使用して、STa6000 をシリアルアダプタに接続します。 |
イーサネットポート | STa6000 とコントローラの工場イーサネットポートまたは工場ネットワークの間に、イーサネットケーブルを接続します。 |
STpad の接続
接続 | 備考 |
|---|---|
COM ポート | ACTA シリアルケーブルを使用して、STpad をコントローラの COM ポートに接続します。 |
イーサネットポート | STa6000 とコントローラの工場イーサネットポートまたは工場ネットワークの間に、イーサネットケーブルを接続します。 |
STa6000またはSTpadを介したQA校正の実行
ツールが接続されており、コントローラの仮想ステーションに割り当てられていることを確認してください。
単一の締め付けプログラムは、校正のために使用することはできません。バッチプログラムが選択されていることを確認してください。
ホームビューで、[ツール]タブをタップします。次に、[QA 校正] をクリックし、[QA 校正] を [ オン] に設定します。
校正するツールが接続されている仮想ステーションを選択し、使用する接続タイプを選択します(COM ポートのTCP)。
デフォルトの通信用ポートは 4561 です
STa6000/STpad をコントローラに接続し、正しい仮想ステーションを選択します。
STa6000/STpad で校正を開始します。
STa6000/STpad がツール情報と締め付けプログラムを含むコントローラ情報を要求します。
締め付けを実行します。校正装置が締め付けを検出すると、コントローラからの締め付け結果を要求します。
バッチ内のすべての締め付けが実行されるまで、このステップを繰り返します。
完了すると STa6000/STpad がレポートを生成し、ツールの新たな校正値を計算します。
新たな校正値をコントローラに送信するため、STa6000/STpad で保存を選択すると、コントローラがツールにこれを書き込みます。
校正中に締め付けプログラムが変更される、またはシーケンス/バッチが更新されると、校正は終了します。
校正に使用されるバッチサイズには上限はありません。ただし、STa6000 はバッチサイズを最大 2 桁で表示します。そのため、Sta6000 のカウンターは、100 を 00 として表示します。
校正が完了したら、締め付けを行って新しい値が正しいことを確認します。
ツールのモーター調節
モータチューニングでは、パフォーマンスを最適化してエネルギー損失を最小限にするようツールのモータ制御を調整します。
ケーブルツールについて、モータ調節は、コントローラとツールの特定の組み合わせ毎に実施する必要があります。STB ツールは、新しいモータ調節を行うことなく別のコントローラに移動させることができます。
モータの調節を実行する前に、ツールが仮想ステーションに接続され、コントローラが締め付けを実行するよう設定されていることを確認してください。
モータ調節を行うのには約 1 分間かかり、終了するまで、時計回り (CW) と反時計回り (CCW) の両方向にスピンドルを回転させます。
オープンエンドギアフロントアタッチメント(GFA)で構成されたツールの場合、モーター調節を実行する前に、ツールからオープンエンド延長を取り外します。
ツールモータ調整を行います。
ホームビューで、[ツール]タブを選択します。続いて、モーターの調整を行うツールを選択して、モータ調節に移動します。
[実行]を選択し、ツールのトリガーを押します。
OKを選択して、モータ調節を開始します。
画面上の指示に従って、モーター調整が完了するまでツールトリガーを押し続けます。
モータ調節が成功すると、OK イベントが表示されます。
モータ超背うtが成功しなかった場合、またはモータチューニングが終了する前にツールトリガーが放された場合、NG イベントが表示されます。
オープンエンドの調整
オープンエンドの調節機能は、オープンエンドギアフロントアタッチメント(GFA)で構成されたツールで使用できます。
この機能は、ツールと延長を組み合わせた真のギア比を計算し、それをツールに保存します。
調整の実行には約2分かかります。
オープンエンドの調整が完了したら、オープンエンド延長を取り付けた状態でツールを校正する必要があります。
オープンエンドの調整を行います。
ホームビューで、[ツール]タブを選択します。続いて、調整を行うツールを選択して、オープンエンド調節に移動します。
[実行]を選択し、ツールのトリガーを押します。
画面上の指示に従って、オープンエンド調整が完了するまでツールトリガーを押し続けます。
オープンエンド調節が成功すると、OK イベントが表示されます。
オープンエンド調節が成功しなかった場合、または調節が終了する前にツールトリガーが放された場合、NG イベントが表示されます。
無線ツール用 WLAN と Bluetooth
Power Focus XCPower Focus XC コントローラは、ペアリングプロセスでコントローラに無線ツールが接続できるようにするビルトイン無線 LAN と Bluetooth の無線モジュールを備えています。ペアリングが確立されると、ツールがコントローラの範囲内であれば、コントローラに自動的に接続します。コントローラとペアリングされたツールは、他のコントローラが同じ無線チャネルを使用するように設定されている場合でも、その特定のコントローラにのみ接続できます。
コントローラの WLAN 無線モジュールは、一度に 3 つのツールに接続することができ、Bluetooth モジュールは同時に 6 つの接続が可能です。
STBツールとSTwrenchのペアリングモード
STBツールをペアリングモードにする
ツールから(充電済み)バッテリを外します。
バッテリーを取り付け直す間、ツールトリガーを引きます。
ツールの LED が消灯したら、ツールトリガを外します。
ツールの LED が再び点灯したら、ツールトリガを押します。
ツールの LED が再び消灯したら、ツールトリガを解除します。両方の LED が点滅を開始します(約 10 秒後)。
ここでツールはペアリングモードになります。LED は、ツールがペアリングモードになっていると点滅し続けます。
ツールの両方の LED が点滅する前に、Power Focus ペアリング手順を開始しないでください。30 秒以内にペアリングを開始しなければ、ツールがタイムアウトすることがあります。
ツールがペアリングモードになれば、[接続タイプ] をタップしてペアリングプロセスを始めます。
STwrench をペアリングモードにする
ST レンチをオンにします。
セルおよびジャイロスコープの調整時には、STwrenchキーボード上の[上]、[右] および [バーコード] ボタンをこの順番に押してください。
ゼロ調整の終了時に、レンチはペアリングモードになります。
ツールがペアリングモードになれば、[接続タイプ] をタップしてペアリングプロセスを始めます。
Bluetooth の要件
Power Focus XCPower Focus XC で Bluetooth を使用するには、次の要件を満たす必要があります。
Power Focus XCPower Focus XC ソフトウェア 3.5 以降
Bluetooth モジュールの装備されている無線ツール
ツールソフトウェアブートバージョン 9.1.6 以降
ツールソフトウェアアプリバージョン 3.6.1 以降
無線ツールの制限
すべての WLAN (3) または Bluetooth スロット (6) が使用されている場合、コントローラとペアリングされた別の無線ツールを、既存のペアリングされているツールの代わりに使用できます。この代替にはいくつかの規則があります。
WLAN には、以前にペアリングされていたツールの 1 つがランダムに代替されます。
Bluetooth の場合は、オフラインツールが最初に使用され、その後にオンラインツールが使用されます。バーチャルステーションにリンクされているツールは代替されません。バーチャルステーションに 6 つの無線 Bluetiooth ツールがすでにリンクされているコントローラに、別の Bluetooth 対応ツールをペアリングする場合は、必ずバーチャルステーションからペアリングされているツールを 1 つ削除してから、別のツールにペアリングします。バーチャルステーションから切断されたツールが、新しいツールで代替されます。
コントローラへのワイヤレスツールのペアリング
メカトロニックレンチとコントローラのペアリングは、他のワイヤレスツールとは異なり、コントローラにMWRKitを接続する必要があります。詳細については、ツールの製品説明書を参照してください。
ペアリングプロセスを開始する前に:
コントローラーでWLANまたはBluetoothが有効になっていることを確認します(ペアリングするワイヤレスツールによって異なります)。
利用可能なペアリングスロットがあることを確認します(WLAN用に3つ、Bluetooth用に6つ)
使用する無線チャネルを確認します
ツールをペアリングモードにする方法を確認します。これを行う方法については、STB ユーザーガイド (9836 3043 01) を参照するか、以下の指示に従ってください
可能であれば、ツールとコントローラ間の障害を取り除きます
他のツールが、同時にコントローラとペアリングされていないことを確認します
[設定]> [WLAN]に移動して、内部WLANを有効にします。有効スイッチをオンにドラッグします。
WLAN 対応スイッチがオフに設定されている場合は、ツールをコントローラにペアリングできません。[有効]スイッチを[オフ]に設定すると、すでに内部WLANに接続されているツールは切断されます。
無線ツールで使用する無線チャンネルを設定します。ホームビューで、[設定]タブをタップし、[ WLAN ]をクリックします。
無線チャネル領域で、チャンネルリストをタップして、適切なチャンネルを選択します。
チャンネルを変更すると、コントローラとペアリングされたすべてのワイヤレスツールを永続的に切断します。
ホームビューに戻り、[ツール]タブをタップします。次に、右上隅にあるペアリングアイコンをタップします。

ツールをペアリングモードにします。ワイヤレスツールをペアリングモードにするを参照してください。
ペアリングダイアログボックスで、実施するをクリックしてペアリングプロセスを開始します。
ペアリングプロセスは、以下の結果のいずれか 1 つが出ると終了します。
ペアリング成功 - ツールが、選択されたチャネルを使ってコントローラとペアリングされました。
ペアリング失敗 - これは、次のいずれかの理由が考えられます:
ペアリングプロセス中にツールが検出されませんでした。ツールが範囲内でペアリングモードになっていることを確認し、[閉じる] をクリックしてもう一度試してください。
ペアリングプロセス中に複数のツールが見つかりました。他のツールがペアリングモードになっていないことを確認し、[閉じる]をクリックしてもう一度やり直してください。
ペアリングは既に進行中です。他のユーザーがコントローラでペアリングプロセスを実行していないことを確認し、[閉じる] をクリックしてもう一度やり直します。
ペアリングに失敗しました。[閉じる]をクリックしてもう一度やり直してください。
IRC-Wインフラストラクチャツールは、工場のワイヤレスインフラストラクチャを使用してコントローラーに接続するツールです。ツール構成(ADHOCまたはインフラストラクチャモード)は、ToolsTalk Service 2で設定されます。IRC-Wインフラストラクチャツールとして構成されたツールは、コントローラー独自の組み込みネットワークを使用して、ADHOC接続ツールとしても接続できます。ただし、ツールが再起動すると、IRC-Wインフラストラクチャとしての構成ツールに戻ります。
BCP/BCV-REツールの接続
BCVツールとBCPツールをコントローラーに接続するプロセスは、他の種類のツールとは少し異なります。
ホームビューで、[設定]タブをタップします。次に、[BCP/BCV-RE 接続] を選択します。
右上のプラス (+)アイコンをクリックして、新しいBCP/BCV-RE接続の構成を追加します。
設定をオンにして、名前フィールドに名前を入力します。
接続するツールのサーバー ポートとサーバー ホストをそれぞれのフィールドに入力します。これらは両方、ツールのローダーソフトウェアにあります。
これでツールがコントローラに接続されました。締め付けプログラムで使用するには、これを仮想ステーションに割り当てます。
[仮想ステーション] タブの操作
バーチャルステーションは、バーチャルステーションメニューで構成します。
バーチャルステーションは、物理的なステーションのソフトウェアを要約したものであり、特定のツールを使用して、ツールを使って異なるタスクをリモートで実行するよう設定することができます。
Power Focus XCPower Focus XC では、コントローラごとに 16 台のバーチャルステーションを設定できます。各バーチャルステーションは、1 つのツールと複数のアクセサリーに接続できます。
仮想ステーションを使用することで、オペレータは、複数のツールを操作し、同じコントローラーを使用してさまざまなタスクを実行することができます。1 つのケーブルツールと複数の STB ツールをコントローラーに同時に接続することができます。
さまざまなツールを構成する場合、[開始ソース]の選択した開始信号が選択したツールと一致しており、選択したタスクが特定のツールで実行すできることを確認してください。
締め付けを開始できるようになる前に、仮想ステーションメニューでタスクを選択する必要があります。タスクは、次の 3 つのタイプのうちの 1 つです。
締め付けプログラム
バッチシーケンス
ソース
選択は、オペレーターにより手動で、または外部信号により行うことができます。
本セクション内
仮想ステーションの作成
On the home view, go to the Virtual Station tab and select the plus icon in the upper-right corner of the screen.
名前と他のパラメータを編集します。
作成された仮想ステーションのリストが作成順に示されます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
ツールを割り当てるときに、ツール構成がない場合、新規ツール構成が自動的に作成され、仮想ステーションに割り当てられます。
この自動作成ツール構成には、トリガーのみに設定されたスタートソースと、オフに設定されたトレースがあります。STB ツールでは、スタートリクエストは、オンに設定されます。
バーチャルステーションを削除しています。
On the home view, go to the Virtual Station tab and select the virtual station to remove on the left pane.
Select the Delete icon at the bottom of the virtual station´s list of parameters.
仮想ステーションへのライセンス割り当て
仮想ステーションを機能させるためには、仮想ステーションタイプライセンスを割り当てる必要があります。
バーチャルステーションメニューに移動し、ライセンスを割り当てるバーチャルステーションを選択します。
ライセンスのセクションで、バーチャルステーションタイプフィールドにある矢印を選択します。
ライセンスタイプの変更ウィンドウが表示されます。
バーチャルステーションに割り当てるバーチャルステーションタイプを選択します。
[追加のバーチャルステーション機能を割り当てる必要がある場合] 機能フィールドで編集を選択します。.
機能の選択ウィンドウが表示されます。
バーチャルステーションに割り当てるすべての機能にチェックマークを入れて、OKを選択します。
バーチャルステーションからのライセンスの割り当て解除
バーチャルステーションメニューを選択し、ライセンスの割り当てを解除するバーチャルステーションを選択します。
ライセンスのセクションで、バーチャルステーションタイプフィールドにあるライセンス名を選択します。
ライセンスタイプの変更ウィンドウが表示されます。
割り当てを解除する割り当て済み仮想ステーションタイプの名前を選択します。
ライセンスタイプの変更が閉じてバーチャルステーションタイプフィールドがなしと表示されます。すべての機能はコントローラからも削除されます。
仮想ステーションが削除されると、その仮想ステーションに関連付けられたライセンスが自動的にプールに戻されます。
仮想ステーションへのツールの接続
仮想ステーションは、接続されたツールを 1 つしか持つことができません。コントローラーに接続されているツールの一つのみケーブルツールとすることができます。追加された仮想ステーションは、コントローラーにペアリングされた無線ツールを接続できます。
各仮想ステーションは、ツールに加えて、ツール構成を一つ有する必要があります。ツール構成は、構成メニューで作成します。
バーチャルステーションメニューに移動し、ツールを接続するバーチャルステーションをタップします。
ツール領域で、ツールの選択をタップして、使用可能なツールのリストを開きます。
または、ツールがすでに選択されている場合、ツールの変更をタップして、変更することが可能なツールのリストを開きます。
使用可能なツールのリストで、バーチャルステーションに接続する予定のツールをタップします。
使用できないツールはグレー表示されます。このようなツールを接続するには、まずバーチャルステーションから切断しなければなりません。
新規ツールを接続すると、ツール構成が添付されます。利用可能な構成が複数ある場合は、ツール構成のリストが示されます。
仮想ステーションのツール構成を置き換えるには
現在の構成の名前の横にある矢印をクリックします。
リスト内の構成の別の構成を選択します。
別の利用可能な構成を選択するためだけに、構成を選択解除することはできません。
仮想ステーションでのタスクウィンドウの構成
選択したタスクは、締め付けプログラムを実行しているか、バッチシーケンスを実行しているか、あるいはソースメニューで較正したソースを使用してタスクを有効にしている可能性があります。
タスクはコントローラから監視することができ、タスクの結果は、操作中に発生した可能性のあるイベントとともに表示することができます。
本セクション内
仮想ステーションでの手動モードの構成
仮想ステーションの手動モードは、ツールがロックモードになっている状態でタスクを実行するために使用します。特定の理由でツールがロックされている場合(例えば、ツールが TLS のフットプリント外にある場合)でも、緊急作業を行うといった特定の作業をツールで行う必要があるかもしれません。仮想ステーションを手動モードに構成することで、ユーザーは、手動モードを入力する際にどの信号が送られるか(入力信号)、手動モードの場合にどの作業が実施できるか(二次作業)、手動モードを終了する際にどの信号が送られるか(終了信号)を決定できます。
所望のシナリオは異なるユーザー間で変わるため(すなわち、開始と終了時にどの信号が送信されるか、どの作業を実施するか)、手動モードは、各仮想ステーションで完全に構成可能です。
構成は、入力信号、終了信号および二次タスク(一次タスクは、タスクの下にある仮想ステーションに割り当てられる(自動)タスクの意味)の 3 つの要素から成ります。
仮想ステーションメニューに移動し、仮想ステーション上をクリックして構成し、次に作業の下にある手動モードの設定をクリックします。
手動モードの構成画面で、二次作業を設定します。これにより、手動モードでどの作業を実施しなければならないかを決定します。
二次作業が設定されていない場合、手動モードでは一次作業が使用されます。
すべてのタスクタイプ(締め付け、バッチシーケンス、ソース)は、一次作業のような二次作業に対して設定できます。
入力セクションの下にあるプラスアイコンをクリックして、送信する入力信号を設定します。以下の入力信号のパラメーターを参照してください。
終了セクションの下にあるプラスアイコンをクリックして、送信する終了信号を設定します。以下の終了信号のパラメーターを参照してください。
入力および終了の設定が可能な信号には 99 個の制限があります。
本セクション内
入力 / 終了信号
入力信号と終了信号のパラメーターは同じです。
信号には次の 2 つのタイプがあります。ブール値と整数 / 文字列タイプ。ブール値タイプ信号に対して、オン / オフ(真 / 偽)スイッチが使用されます。整数 / 文字列タイプ信号について、(I/O)信号または文字列を示すことができるテキストフィールドが使用されます。
信号 | タイプ | デフォルト値 |
|---|---|---|
シーケンスの中止 | ブール値 | オフ |
イベントを確認します。 | ブール値 | オフ |
ツールスキャナのアクティブ化 | ブール値 | オフ |
結果のクリア | ブール値 | オフ |
オープンプロトコルコマンドを無効化 | ブール値 | オフ |
ツールスキャナーの無効化 | ブール値 | オフ |
ダイナミック バッチサイズ | 整数 | 0 |
外部識別子 | 整数 | 0 |
外部監視 [1~8] | ブール値 | オフ |
フラッシュツール緑 LED(外部プロトコル) | ブール値 | オフ |
一般的な IO [1~10] | 整数 | 0 |
ダイナミック バッチサイズの ID | 整数 | 0 |
バッチをリセット | ブール値 | オフ |
バッチシーケンスのリセット | ブール値 | オフ |
双安定リレーをリセットします。 | ブール値 | オフ |
多すぎるNOKをリセットします。 | ブール値 | オフ |
入力の選択 | 整数 | 0 |
双安定リレーを設定します。 | ブール値 | オフ |
完了時にツールをロック解除 | ブール値 | オフ |
無効なツールのロックを解除 | ブール値 | オフ |
仮想ステーションのプロトコルウィンドウの構成
仮想ステーションメニューのタブプロトコルで、使用中の現在のライセンスに応じて利用可能な通信プロトコルのリストを見つけます。オープンプロトコルは、すべてのライセンスで利用可能です。
オープンプロトコルを介して機能にアクセスするには、各仮想ステーションの固有ポートを定義する必要があります。
オープンプロトコルスイッチをオンにします。
サーバのポート番号 を入力します。
PLCインデックス値を1〜6の範囲で入力します。
PLC インデックスは、共有メモリ内でオープンプロトコルのコマンドが書き込まれる場所をマッピングするために使用されます。既定値は 1 ですが、1 ~ 6 の値を入力できます。
クライアントへの接続が失われたときに適用されるアクションを選択します。
切断設定は、接続エラーが発生したときに適用されるアクションをコントロールします。
なし - 締め付けプログラムが正常に続行します。
ロックツール - ツールは、現在の締め付けを正常に終えた後にロックされます。
タスクの選択解除 - 進行中の作業を終えた後に締め付けが中止されます。タスクが終了後に削除されるプレーンの締め付けプログラムまたはバッチシーケンスを除きます。
ツールを常時ロック - 結果にかかわらず、ツールは、現在の締め付けを終えた後にロックされます。
レガシーカウンタを使用
レガシカウンタ設定では、シーケンスのすべての締め付けをカウントし、その数値を二次システムに出力します。この設定を有効にするには、レガシーカウンタを使用をオンに設定します。
MID2500緩めプログラム
この設定により、リストからMID2500緩めプログラムプログラムを選択できます。
準備ができたら[適用]をタップまたは選択します。
仮想ステーションでのアクセサリウィンドウの構成
仮想ステーションへの QIF アクセサリの接続と切断については、「仮想ステーションへの QIF アクセサリの接続」および「仮想ステーションへの QIF アクセサリの接続」を参照してください。
I/O 診断の助けを借りたアクセサリのトラブルシューティングについては、デジタル信号診断を参照してください。
デジタル信号診断
展開時、トラブルシューティング時に、コントローラー診断ツールは非常に有用です。仮想ステーションメニューのデバイス構成やフィールドバスマッピングの情報タグの下にある分析で利用可能です。
コントローラーは、通常モードまたは診断モードで動作できます。通常モードでは、デジタル入力信号と出力信号が正常に動作し、内部コントローラーロジック間、および外部アクセサリーまたはコネクタにルーティングされます。
診断モードは、モニターモードと強制モードに分けられます。モニターモードでは、信号が正常に働きますが、信号動作のライブ監視を行います。強制モードでは、コントローラーの内部ロジックと外部アクセサリー間の接続が開かれ、入力信号と出力信号を所望の状態に導くことができます。
一度に 1 つのデバイスまたは 1 つのフィールドバスのデジタル信号を診断することが可能です。
診断の構成
特定のアクセサリーのための IO 診断は、アクセサリーの仮想ステーション表示の情報オプションを介してアクセス可能です。
Accessing the diagnostics configuration:
On the home view, go to the Virtual Station tab and select a Virtual Station on the left pane.
Go to the Accessories window, select Info and then Diagnostics.
スイッチで監視モードまたは強制モードを有効にします。
入力信号と出力信号の状態は、それぞれのタブの下にあります。
単一のユーザまたは機能から診断に同時にアクセスすることだけできます。診断がすでに使用されている場合は、情報メッセージが画面で表示されます。
通常の操作
通常の操作モードでは、外部入力信号は内部コントローラロジックに送られ、コントローラ出力信号は、診断モジュールの介入なしに、外部ターゲットに送られます。
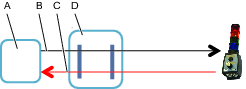
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
デジタル信号の監視
診断モードでは、コントローラの内部論理回路に出入移動する全ての信号が監視されます。信号タップは診断モジュールで接続され、信号の状態は、Web GUI またはコントローラ GUI で表示されます。
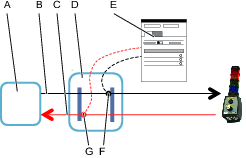
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
E | ユーザインターフェイス |
F | 出力信号タップ |
G | 入力信号タップ |
デジタル信号の強制
診断モードでは、コントローラの内部論理回路に出入移動する全ての信号が所望する状態に強制されます。信号のラインは、診断モジュールで表示されます。ユーザーインターフェイスからの入力信号と出力信号の両方を定常状態に強制できます。ユーザーインターフェースは、Web GUI またはコントローラ GUI のいずれかです。
シグナルが強制される間、コントローラは正常に作動します。診断モードと強制モードを出ると、すべての信号は、コントローラの現在の動作状態に設定されます。この設定は、望ましくない動作を生み出すデジタル出力の状態変化に繋がる場合があります。
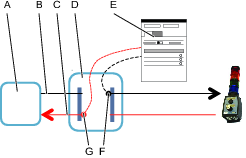
A | コントローラの内部状態機械とロジック機能 |
B | デジタル出力信号経路 |
C | デジタル入力信号経路 |
D | 診断モジュール |
E | ユーザインターフェイス |
F | 強制出力信号挿入ポイント |
G | 強制入力信号挿入ポイント |
[構成]タブの操作
ツール構成
On the home view, go to the Configurations tab and select Tool Configuration on the left pane to configure the available accessory functions on the tool.
ツールのタイプによって、異なる機能が利用可能です。
ツールのアクセサリ機能の構成
On the Configuration window, select Filter by tool type. 次に、必要なツールを選択します。
On the Configuration window, select Edit to configure the relevant functions.
仮想ステーションに割り当てられた構成を削除することはできません。
If available, configure the Function Button, the LED Ring, the Direction Switch, the Buzzer and the Vibrator by selecting the ellipsis icon on the corresponding fields.
Each field shows a number which corresponds to the number of the specific function (for example, 1 corresponds to Function Button, 2 to LED Ring, 3 to Direction Switch, 4 to Buzzer and 5 to Vibrator).可能な場合は、お客様の必要に応じて、一般設定、開始条件、およびアクセサリバスを構成します。
機能ボタンの構成
利用可能な入力信号を最大 6 つ制御するには、ツールの機能ボタンを使用します。ボタンの 3 つの可能な条件状態、方向スイッチの 2 つの可能な状態で組み合わせられます。
機能ボタンの状態 | 方向スイッチの状態 |
|---|---|
シングルプッシュ | CW |
シングルプッシュ | 反時計回り |
ダブルプッシュ | CW |
ダブルプッシュ | 反時計回り |
ボタン入 | CW |
ボタン入 | 反時計回り |
2 つの構成可能なパラメータが、プッシュ時間を制御します。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
プッシュ検出間隔 | ワンプッシュの場合:時間押されているボタンとリリースされているボタン間の最長プッシュ時間(ミリ秒)。 | 300 ms |
次のプッシュ間隔 | ダブルプッシュの場合:最初のプッシュ後にリリースされたボタンと再び押されたボタン間の最長時間(ミリ秒)。 | 300 ms |
ツールLEDの構成
ツール上の別の LED インジケータは、利用可能な出力信号のいずれかによって制御されるように構成されます。
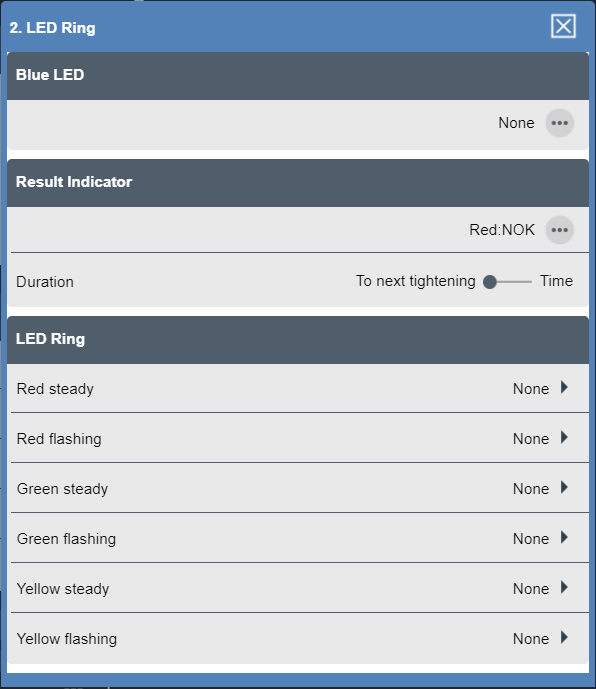
青色 LED
青色 LED は、構成可能な時間にわたって点灯するか、次の締め付けまで点灯するように構成されます。構成で選択された信号で点灯します。
結果インジケーター
結果インジケーターで、締め付け結果で LED がどのように、どのくらいの時間点灯するかが決まります。事前構成されたパターンをショートカットメニューから選択します。このパターンは、締め付け結果の組み合わせも可能です。
信号 | 説明 |
|---|---|
オフ | 結果にかかわらず、締め付け後に LED は有効になりません |
緑 | 結果インジケーターが選択されている場合、締め付けが正しく終了すると(OK)、緑の光がデフォルトの信号です。 |
赤:高:黄:低 | 締め付けが誤って終了した場合(NOK)、赤の LED が、最終的な値が高すぎることを示すか、黄色の LED が、値が低すぎることを示します。赤と黄が同時に点灯します(トルクが高すぎる場合や、角度が小さすぎる場合など)。 |
赤:高(prio):黄:低 | 締め付けが誤って終了した場合(NOK)、赤の LED が、最終的な値が高すぎることを示すか、黄色の LED が、値が低すぎることを示します。赤と黄は同時に点灯できません。高と低の値が同時に発生する場合には赤のみが点灯します。 |
赤:NOK:黄:低 | 赤の LED は、締め付けが不正に終了したことを示します (NG)。値が低すぎる場合、追加の黄色の LED を示すことができます。 |
赤:NG | 赤の LED は、締め付けが不正に終了したことを示します (NG)。追加の LED は表示されません。 |
LED リング
LED リングは、LED が締め付け間でどのように動作するかを決定します。LED リングは、LED ランプの 3 つの円で構成されます。1 つの円は赤の LED、1 つの円は黄色の LED、1 つの円は緑色の LED です。各円では、定常信号または点滅信号が可能です。これにより、LED リングに接続できる合計 6 個の異なる信号を提供します。
締め付けが進行中でない場合と制御出力信号が有効になった場合にのみ LED がオンになります。
最大時間を超えると、LED はオフになります。信号タイプがイベントの場合にのみ適用されます。
次の締め付けが開始すると、LED はオフになります。
制御出力信号が無効になると、LED はオフになります。信号タイプが状態の場合にのみ適用されます。
方向スイッチの構成
ツールの方向スイッチは、時計回り(CW)から反時計回り(CCW)に、またはその逆に、すばやく(500ミリ秒の持続時間で)切り替えられたときに特定の入力信号をトリガーするように構成できます。
ブザーの構成
ブザーは、利用可能な信号のリストから選択された信号に音声を割り当てることで構成されます。
音声は、表に記載されたパラメータのセットで構成されます。音声のある信号は、1 から 10 の間で優先順位付けできます(1 が最高の優先順位、10 が最低の優先順位)。デフォルトで、信号と音声は優先順位 5 を有しています。最大 20 音声を信号に割り当てできます。
パラメータ | 説明 |
|---|---|
優先度 | Defines the priority of the buzzer. |
周波数 | 正確な周波数(Hz)。 |
オン時間 | ブザーが音声を発する時間(ミリ秒)。 |
オフ時間 | ブザーが音声を出さない時間(ミリ秒)。 |
繰り返し | ブザーがオン / オフシーケンスを繰り返す回数。 |
音量 | ブザーの音量(最大音量の割合)。 |
一般設定
ツールの一般的設定は、一般的設定セクションで設定できます。
Trace Configuration, TAG Check and TAG Selection functions are further described in their corresponding sections.
パラメータ | 説明 | デフォルト値 |
|---|---|---|
アイドル時間タイムアウト | 一定時間使用しない状態が続いた後、ツールの電源をオフにするかどうかを決定します。 | オン |
<アイドル時間タイムアウト> | アイドル時間タイムアウトがオンに設定されている場合、シャットダウンまでの分数を設定します。 | 120 min |
前面の LED | 前面の LED(ツールトリガの上)の動作を設定します。ワイヤレスツールでのみ使用できます。 | オン |
トリガ解除後の時間 | ツールのトリガが解除されてから、前面の LED が点灯し続ける期間を設定します(秒単位)。 ケーブルツールの場合、前面の LED はツールのトリガが押されてから 10 秒間点灯します。 | 0 秒 |
トレース | 締め付けのグラフィック表示を有効にします。 マルチステッププログラムでは、トレースは常にトリガ押しからオンになります。 ワイヤレスツールの場合、トレースを作成するには、[トリガー押し]または[ランダウン完了]を選択します。 | オフ |
TAGチェック | ツールのTAGチェックを有効にします。プログラムに付属のTAGがSTwrench smartHEADに挿入されたものと異なる場合、ツールはロックされます。 TAG チェックは、STWrench に対してのみ、またはツール構成の検証時にツールが選択されていない場合にのみ使用できます。 | オフ |
TAG選択 | バッチシーケンス/ソース締め付け/ソースバッチを使用して、締め付けプログラム/バッチまたはバッチシーケンスを選択するために使用されます。 TAG 選択は、STWrench に対してのみ、またはツール構成の検証時にツールが選択されていない場合にのみ使用できます。 | オフ |
メモリー満杯時にツールをロック | Enables to lock the tool when the memory of the controller is full. | オン |
トレース構成
トレースにより、締め付けのグラフィック表示をユーザに対して行います。[トレース] は、トリガを押したとき、あるいはランダウンが完了した後のいずれかで開始できます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
トレース | グラフィック形式で結果を表示することができます。 オフ: トレースが行われていません。 トリガ押し:トレースは、ツールトリガを押した際に作成します。 ランダウン完了:トレースは、ランダウン完了に達した時から作成します。 | オフ |
トレース点の最大数は 2000(STB ツールには 200)です。トレース点の最大数を超えると、結果が 1 つおきに消去されます(サンプリングレートが半分になる)。トレースは締め付けがアクティブな限り続行し、トレース点の最大数に達するたびにトレース点の半分が消去され、トレースが継続できるようにします。締め付けの最終段階が終了すると、トレースは停止します。
TAGチェック
TAGチェック機能は、ツールのTAGチェックを有効にします。TAGチェックがPower Focus 6000とSTwrenchの両方で有効になっている場合、プログラムに付属のTAGがSTwrenchsmartHEADに挿入されたものと異なる場合に、ツールがロックされます。
TAG番号は、作業タスクに応じて異なる方法で指定されます。
汎用締め付け戦略の場合、TAG番号は締め付けプログラムで指定されます。
マルチステップ締め付け戦略の場合、TAG 番号は[ソース/バッチシーケンス]メニューで選択した内容に応じて異なります。
[ソース締め付け]([ソース] > [締め付け] > [ソース締め付け] > [セレクタモード - 確認]) を実行している場合は、[ソケット] ボックスでTAG番号を指定します。
[バッチシーケンス] ([バッチシーケンス] > [シーケンスライブラリ] > [シーケンス] > [バッチ設定 - 編集])を実行している場合、TAG 番号は識別子番号となります。
[ソースバッチ] ([ソース] > [バッチシーケンス]> [ソースバッチ] )を実行している場合、TAG番号は上記のセクションのように[バッチシーケンス]で指定されます。
バッチシーケンスおよびソースバッチの場合、 自由な順序(バッチシーケンス内)をいいえに設定します。
TAGチェックはSTwrenchでのみ使用できます。
TAGチェックのオプション | 説明 |
|---|---|
オフ | 挿入されたTAGに関係なく、ツールはロックしません。 |
オン | TAG番号が締め付け戦略の構成で指定されたTAG番号と異なる場合、ツールはロックされます。 |
TAG選択
TAG選択機能は、STwrenchsmartHEADに挿入されたTAGのTAG番号に対応するTAG番号が構成されている締付けプログラム/バッチまたはバッチシーケンスを選択するために使用されます。
TAG選択はSTwrenchでのみ使用できます。
TAG選択のオプション | 説明 |
|---|---|
オフ | STwrenchは、締め付けプログラム/バッチまたはバッチシーケンスを選択するようにコントローラに信号通知しません。 |
オン | バッチシーケンス/ソース締め付け/ソースバッチで構成されたTAG番号に従って、締め付けプログラム/バッチまたはバッチシーケンスを選択します。 |
開始条件の構成
開始ソース、トレース、開始リクエストなどのツールに対する開始条件は、ここで構成されます。機能は、それぞれのセクションで説明されています。
要求の開始
開始要求により、STB ツールのツールとコントローラー間の永続的な接続の要件が有効になります。これにより、ツールが締め付けプログラムまたはバッチ設定で、また締め付けを行う際に、コントローラーの他の設定で常に最新になるようにできます。
開始要求がオンに設定されると、ツールがコントローラーとの接続を失った場合にツールがロックされます。つまり、ツールが締め付けまたはバッチシーケンスの途中で接続を失った場合、ツールは進行中の締め付けを終了してから停止します。ツールが接続を再確立するまで、ツールはロックされます。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
要求の開始 | ツールがコントローラーとの接続を失うと、ツールをロックします。 オン: ツールがコントローラーとの接続を失うと、ツールは締め付けを行ってからロックされます。 オフ: ツールは、コントローラーとの接続を失っても、締め付けを続けて行うことができます。 | オン |
ソースの開始
ツール開始ソースを使って、ツールを開始する方法を設定します。デフォルト値は、トリガーのみです。
開始ソースは、特定のツールタイプでのみ使用できます。
ソースを開始 | 説明 |
|---|---|
トリガのみ | 締め付けを開始するには、ツールのトリガを押します。 |
トリガまたはプッシュ | ツールトリガを押すかツールをジョイントに押して付けて、締め付けを開始します。 |
トリガとプッシュ | ツールトリガを押してツールをジョイントに押して付けて、締め付けを開始します。 |
プッシュのみ | ツールをジョイントに押して付けて、締め付けを開始します。 |
安全トリガー | (トリガーとプッシュのように)2 つのトリガーが、締め付けを開始するのに相互に 500 ミリ秒以内に有効になります。 |
アクセサリバスの構成
ツールアクセサリは、アクセサリバスを介してツールに接続されます。ツールアクセサリは、コントローラ上の各ツール構成に対して別々に構成されます。
タイプ | 説明 |
|---|---|
ST セレクタ | 構成に応じてタスクまたはプログラムを選択するために使用する小型のディスプレイとボタン。 |
TLS タグ | オペレーターに対して出力信号を提供するのに用いるツール位置システムタグ。 |
EHMI | 構成に応じてタスクまたはプログラムを選択するために使用する小型のディスプレイとボタン。 |
スキャナ | A device to read a barcode string or a QR code containing information. |
ST セレクタ
ST セレクタはツールアクセサリです。ツール上にインストールされ、ツールアクセサリバスに接続されます。小型ディスプレイ、2 つの入力ボタンおよび出力 LED を備えています。
ディスプレイ
ディスプレイは、一度に 1 件の情報を表示し、すべてのページに別のプリセット項目を表示するように構成できる 4 つの異なるページがあります。
パラメータ | 説明 |
|---|---|
ページ 1 | リストから表示するメッセージを選択します:
|
ページ 2 | |
ページ 3 | |
ページ 4 |
スイッチ時間
パラメータ | 説明 |
|---|---|
スイッチ時間 | 次のメッセージが表示される前に 1 つのメッセージを表示する時間を選択します。 |
ボタン
2 つのボタンを、表示された情報に基づいて作用するように構成して、リスト表示した項目を移動するのに用いることができます。
パラメータ | 説明 |
|---|---|
左ボタン | ショートカットメニューから 1 つの操作を選択します。 |
右ボタン | ショートカットメニューから 1 つの操作を選択します。 |
ステータス LED
ステータス LED を有効化または無効化することができます。
パラメータ | 説明 |
|---|---|
結果 LED の有効化 | 所望するオンまたはオフのラジオボタンを選択します。 |
追加 LED の有効化 | 所望するオンまたはオフのラジオボタンを選択します。 |
結果 LED は、赤、緑、黄色であり、主要なツールの LED と同じ情報を示します。
2 つの追加 LED は、バッチ OK とバッチシーケンス OK を表示できます。これらの両方の LED は、次の締め付けでオフになります。
TLS タグ
ツール位置システム (TLS) タグはツールのアクセサリーです。TLS タグはツール上にインストールされ、ツールアクセサリーバスに接続されます。これは、Ubisense 位置決めシステムの一部であり、コントローラから独立して処理されます。位置決めに加えて、TLS タグは、オペレーターに情報を提供するために使用することができます。選択した出力信号は、異なる LED ライトの組み合わせを生成することができます。
最大 10 個の異なる出力信号をライトの優先度にマッピングできます。
|
パラメータ |
説明 |
|---|---|
|
信号 |
ショートカットメニューから LED ライトをトリガーする信号を選択します。 イベントタイプの信号について、信号の持続時間を選択します。 |
|
色 |
LED の色を選択します。 |
|
優先度 |
音に対して 10 個の優先度レベルが利用可能であり、そのうち 1 つは、最も優先度の高いレベルです。デフォルトの優先度は 5 です。 |
2 つの同時信号の場合は、優先度の高い信号が優先となります。同じ優先度を持つ 2 つの信号が LED をトリガすると、最初に到着した信号が優先されます。
出力信号は、イベントタイプまたは状態タイプになる場合がありです。
状態が有効であれば、状態信号は有効になります。
設定可能時間中、イベント信号は有効です。
EHMI
EHMI はツールアクセサリです。ツール上にインストールされ、ツールアクセサリバスに接続されます。グラフィカルディスプレイ、3 つの機能ボタン、オプションのスキャナがあります。ディスプレイは、締め付けプログラム、バッチシーケンスを選択し、締め付けからの結果を表示する機能をもつコントローラ GUI のサブセットです。コントローラとのやり取りは、機能ボタンを使用して行います。
EHMI 構成で、機能ボタンがオンまたはオフであるかを判断することができます。
パラメータ | 説明 |
|---|---|
機能ボタンの有効化 | オン = ボタンには、表示されたメニュー内の設定を構成するための全機能があります。 オフ = 機能ボタンは、EHMI で必要なダイアログを確認するためだけに使用できます。 |
スキャナ
スキャナは、ツールアクセサリーです。 It is installed on the tool and connected to the tool accessory bus.
A scanner is used to read a barcode string or a QR code containing information to choose the appropriate batch sequence.
パラメータ | 説明 | デフォルト値 |
|---|---|---|
通過モード | オン: Enables pass through. オフ: Disables pass through. | オフ |
デジタル信号
入力信号
入力信号は、例えば、アクセサリのボタンまたはスイッチ、ツールアクセサリまたは QIF アクセサリのいずれかを使って、あるいは I/O 入力プラグに信号を接続することで実行するシステムコマンドです。
入力信号のロックツールは、各仮想ステーションに対する複数のアクセサリで構成してはなりません。
出力信号
出力信号は、システムの状態またはイベントです。出力信号は、ツールアクセサリまたは QIF アクセサリのいずれかにリンクできます。
セレクタ構成
ソケットセレクタの構成
ソケットセレクタは、例えばバッチシーケンスを通してユーザをガイドするために使用できる LED をもつソケットトレイです。複数の締め付けプログラムを使用する場合、セレクタを使用するのが便利です。ソケットを持ち上げると、対応する締め付けプログラムが選択されます。複数のソケットセレクタを各仮想ステーションに接続できます。
接続されたソケットセレクタに関する情報は、締め付けをタップし、その後ソースメニューのソケットセレクタをタップすれば見つけることができます。
ソケットセレクタを構成するには:
On the home view, go to the Configurations tab and select Socket selector on the left pane. GUIの右上隅にあるプラスアイコンを選択して、外部ツールを作成します。
構成に名前を付けます。
Select Edit.
正しいソケットスロット数に対して追加または削除をクリックし、その後、アクティブにする必要のあるすべてのスロットを選択します(青色で表示)
Set Control to External if the socket selection is to be controlled by an external system.
仮想ステーションへのソケットセレクタへの接続
バーチャルステーションメニューで、使用するバーチャルステーションに移動し、アクセサリーに移動し、アクセサリーを選択をタップします。
アクセサリーの下で、アクセサリーの選択をクリックし、その後、ソケットセレクタータブに移動します。
構成欄(左)で、ソケットセレクターで使用する構成を選択します(ソケットセレクタの構成参照)
接続されたアクセサリー欄(右)で、使用するソケットセレクターを選択します。
イーサネットケーブル / 無線経由でのセレクタ 6 の設定
セレクタ 6 の主な概要
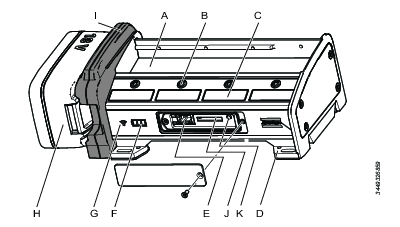
A | ソケットまたはビット用ホルダー |
B | 位置に対するインジケータ LED |
C | ステッカーエリア |
D | 各コーナーの取り付け穴 |
E | サービスポート |
F | バッテリーステータス LED(無線バージョンでのみ利用可能) |
G | WLAN ステータス LED(いくつかのセレクタで利用可能) |
H | バッテリー(無線バージョンでのみ利用可能) |
I | モビリティモジュール(無線バージョンでのみ利用可能) |
セレクタ 6 接続の概要
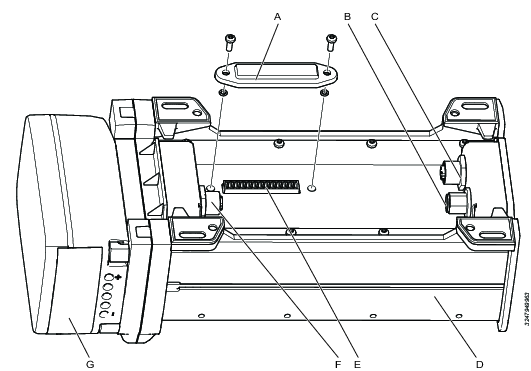
A | コネクタカバー |
B | 外部 DC 電源イン、Kycon(DC DIN)コネクター |
C | イーサネットイン、アップストリーム接続。M12 D コード化メスコネクター |
D | セレクタ背面側 |
E | デジタル入出力コネクター |
F | イーサネットアウト、ダウンストリーム接続。M12 D コード化メスコネクター |
G | バッテリー |
セレクタ 6 サービスポートの概要
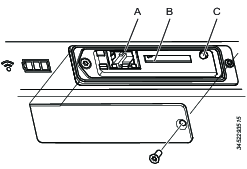
A | RJ45 サービスポート |
B | RBU スロット |
C | 機能ボタン |
一般的なセットアップ
コントローラで、設定 > ネットワークに移動し、工場イーサネットポートで、IP アドレスを確認します(無線接続を介して設定する場合にのみ必要)。
セレクタのサービスポートカバーを開きます。カバーを 2mm 六角ネジで固定します。
サービスインターフェイス内で PC と RJ-45 コネクター間でイーサネットケーブルを接続します。
PoE または外部電源もしくはバッテリのいずれかによりセレクタに電源供給されていることを確認します。
PC で Web ブラウザーのウィンドウを開きます。
Web アドレス 169.251.1.1 を入力し、Enterキーを押します。セレクタの Web サーバーが応答し、セレクタの Web インターフェイスを表示します。
設定
 を左側のナビゲーションで選択します(これは、既定で選択されます)。設定ワークスペースは、構成メニューを表示し、次の 5 つの異なる設定に分かれています。基本設定、サービスポート、イーサネットイン、WLAN、および Power Focus XCPower Focus XC。
を左側のナビゲーションで選択します(これは、既定で選択されます)。設定ワークスペースは、構成メニューを表示し、次の 5 つの異なる設定に分かれています。基本設定、サービスポート、イーサネットイン、WLAN、および Power Focus XCPower Focus XC。イーサネットインセクションで、希望する LED コントロールソースで外部モードオンまたはオフを選択します。
セットアップにおける次のステップは、ソケットセレクタがコントローラに接続される方法によって変わります(コントローラに直接イーサネットケーブル(既定)、工場ネットワークへのイーサネットケーブル、または工場ネットワークへの無線)。お客様のセットアップについては、以下の手順を参照してください。
ソケットセレクタの設定 - コントローラに有線接続したイーサネット(既定)
デバイスとデイジーチェーンコントローラを接続するためのイーサネットポート(RJ45)は、新しい PF6 モデルでのみ利用可能です。古いコントローラモデルにイーサネットケーブルを経由してセレクタ 6 を接続するために、アダプタケーブルを使用して、コントローラ COM PORT にイーサネットケーブルを接続する必要があります。
イーサネットインセクションで、ドロップダウンに接続済みでPF6000(既定)を選択します。
ワークスペースの右上の保存ボタンをクリックします。
サービスポートからイーサネットケーブルを取り外します。
サービスポートを蓋で閉じ、六角ネジで固定します。
ソケットセレクタは、接続済みアクセサリリスト(仮想ステーション > アクセサリ > アクセサリの選択 > ソケットセレクタ)で表示されます
セレクタの設定 - 工場ネットワークに有線接続
イーサネットインセクションで、ドロップダウンに接続済みから工場ネットワークを選択します。
動的または静的 IP アドレス構成に対して DHCP オンまたはオフを選択します。静的 IP アドレスが必要な場合は、IP アドレスフィールドに、ソケットセレクタの IP アドレスを入力します。
PF6000 セクションで、セレクタが接続されるコントローラのコントローラ IP アドレス(上記参照)を入力します。
ワークスペースの右上の保存ボタンをクリックします。
サービスポートからイーサネットケーブルを取り外します。
サービスポートを蓋で閉じ、六角ネジで固定します。
ソケットセレクタは、接続済みアクセサリリスト(仮想ステーション > アクセサリ > アクセサリの選択 > ソケットセレクタ)で表示されます
ソケットセレクタの設定 - 工場ネットワークに無線接続
イーサネットインセクションで、ドロップダウンに接続済みから工場ネットワークを選択します。
WLAN セクションで、次のパラメータを記入します:
有効:ラジオボタンを YES に設定します
SSID:ソケットセレクタの SSID 名を記入します
パスワード:接続する無線ネットワークのパスワードを記入します
暗号化のタイプ:無線ネットワークの正しい暗号化タイプを選択します(WPA-PSK、または WPA2-PSK、EAP-TLS)
PF6000 セクションで、セレクタが接続されるコントローラのコントローラ IP アドレス(上記参照)を入力します。
ワークスペースの右上の保存ボタンをクリックします。
サービスポートからイーサネットケーブルを取り外します。
サービスポートを蓋で閉じ、六角ネジで固定します。
ソケットセレクタは、接続済みアクセサリリスト(仮想ステーション > アクセサリ > アクセサリの選択 > ソケットセレクタ)で表示されます
一般仮想ステーション
一般仮想ステーションで、異なる特定の結果レポートおよび締め付け設定を保存できます。特定の結果をフィルター処理する各種フィルターを作成できます。締め付け設定では、ツールのロック解除動作などの特性を設定できます。これらの構成は、その後、仮想ステーションに割り当てることができます。
構成の追加および編集
構成メニューで、一般仮想ステーションタブをクリックし、右上コーナーにあるプラス符号をクリックします。
新しい構成に名前を付け、編集をクリックします。
レポートウィンドウのための結果フィルターで、結果に含めるパラメーターに対して、スイッチをオンに設定します。既定では、すべてのパラメータがオンに設定されています。
結果フィルターをオンにすると、それぞれの結果が送信されなくなりますが、結果は引き続きコントローラーに表示されます。
以下のパラメーターは、レポート用の結果フィルターセクションで設定できます。
緩め
バッチ増分
バッチ減分
バッチをリセット
締め付けプログラムのバイパス
シーケンスの中止
バッチシーケンスのリセット
[締め付け設定]ウィンドウで、リストされているパラメータのいずれかに値を設定します。既定では、すべてのパラメータがオフに設定されています。
[締め付け設定]セクションでは、次のパラメータを設定できます:
緩めでツールのロックを解除 - NG締め付け後、ツールがロックされていることを確認します。
緩め無効 - プロセスで緩めが許可されていないボルトを、オペレーターが緩めないことを確実化します。
締め付け無効化 - プロセスで締め付けが許可されていないボルトを、オペレーターが締め付けないことを確実化します。
緩めでツールのロックを解除 | 説明 |
|---|---|
オフ | 無効化されたツールは、緩めのステータスに関係なく無効化されたままになります。 |
OK時 | 無効化されたツールは、OK緩めが実行された後にロック解除されます。 |
常時 | 無効化されたツールは、緩めステータスに関係なく、緩めが実行されるとすぐにロック解除されます。 |
緩め無効 | 説明 |
|---|---|
オフ | 緩め無効はオフです。ボルトを緩めることは常に可能です。 |
OK 締め付け時 | OK 締め付けでの緩めを無効にします。オペレーターは、締め付け OK で終了したボルトを緩めることはできません。 |
NG 締め付け時 | NG 締め付けでの緩めを無効にします。オペレーターは、締め付け NG で終了したボルトを緩めることはできません。 |
常時 | 緩め無効は常時オンです。オペレーターは、決してボルトを緩めことができません。 |
締め付け無効化 | 説明 |
|---|---|
オフ | 締め付け無効はオフです。オペレーターは、いつでもボルトを締め付けることができます。 |
OK 締め付け時 | OK締め付け後、締め付けを無効にします。現在の締め付けがOKで終了した場合、オペレーターは別のボルトを締め付けることができません。 |
NG 締め付け時 | NG 締め付け後に締め付けを無効にします。オペレーターは、現在の締め付けが NG で終了すると、別のボルトを締め付けることができません。 |
すべての締め付け後 | 締め付けの無効化は、締め付け後毎に有効化されます。オペレータは、現在の締め付けが終了するまで別のボルトを締めることはできません。 |
無効にしたツールを緩めた後にロック解除できるようにする
ツールが接続されている仮想ステーションに割り当てられている一般的な仮想ステーション構成で、緩めでツールのロックを解除を [OK]または[常時]に設定します。
上記の設定を有効にするには、次の条件を満たす必要があります:
[緩めを無効にする] パラメータが [オフ] または[常時]に設定されていない必要があります。
締めを無効にするパラメータを締め付け無効化と同じ値に設定することはできません。
使用される締め付けプログラムで、緩めが有効になっている必要があります。
無効状態であるために、ツールの締め付けまたは緩めがロックされた場合、次の入力信号のいずれかによってロック解除することができます。
緩めでツールのロックが常時に設定されている場合、指定された入力信号を使用して無効化されたツールのロックを解除することはできません。
仮想ステーションに構成を割り当て
各仮想ステーションは、それに関連付けられた独自の構成を備えることができます。または、複数の仮想ステーションが同じ構成を共有することができます。構成を有効にするには、構成を仮想ステーションに割り当てる必要があります。
仮想ステーションメニューに移動し、構成を割り当てる仮想ステーションを選択します。
一般の下で、既定では、最初の一般仮想ステーションの構成が選択されます。構成名をクリックします。
ポップアップウィンドウで、リストから所望の構成を選択します。選択すると、ポップアップウィンドウが閉じます。
本セクション内
結果表示設定の構成
[結果表示設定]ウィンドウでは、PrT補正値を含めずに最終トルクを表示し、ライブ結果にPrT補正値を表示することができます。
結果表示設定の構成ウィンドウ
On the home view, go to the Configurations tab and select General Virtual Station on the left pane.
On the Configuration window you want to work with, select Edit.
[構成の編集]画面が表示されます。[結果表示設定]ウィンドウで、目的の結果に応じて、関連するスイッチをオンまたはオフに設定します。
[ライブ結果に PrT 補正値を表示] スイッチが [オン] に設定されている場合、[ライブ結果] ウィンドウに PrT 補正値が表示されます 。
[PrT補正で最終トルクを表示]スイッチがオンに設定されている場合、[ライブ結果]ウィンドウに、 PrT補正を含む最終トルクが表示されます。
Setting the switches in the Results Presentations Settings window to either ON or OFF has no impact unless the multistep program has a tightening step including a Prevailing Torque step monitor with the Compensation switch set to ON.
結果表示設定
[結果表示設定]ウィンドウには、さまざまな構成オプションがあります。
ライブ結果にPrT補正値を表示:オン PrT補正で最終トルクを表示:オン | ライブ結果にPrT補正値を表示:オン PrT補正で最終トルクを表示:オフ | ライブ結果にPrT補正値を表示:オフ PrT補正で最終トルクを表示:オン | ライブ結果にPrT補正値を表示:オフ PrT補正で最終トルクを表示:オフ |
|---|---|---|---|
詳細については、画像をポイントしてクリックしてください。 | 詳細については、画像をポイントしてクリックしてください。 | 詳細については、画像をポイントしてクリックしてください。 | 詳細については、画像をポイントしてクリックしてください。 |
本セクション内
PrT補正で最終トルクを表示:オン/ライブ結果にPrT補正値を表示:ON
PrT補正で最終トルクを表示:ON
[ライブ結果]ウィンドウには、PrT補正値が含まれた最終トルクが表示されます。
eHMIとSTセレクターがオンになっており、構成されている場合、PrT補正値が含まれた最終トルクが表示されます。
ライブ結果にPrT補正値を表示:ON
[ライブ結果]ウィンドウには、関連する補正アイコン( )とともにPrT補正値が表示されます。
)とともにPrT補正値が表示されます。
補正値が複数ある場合は、利用可能な最新のステップに適用された補正値が表示されます。
PrT補正で最終トルクを表示およびライブ結果にPrT補正値を表示のスイッチの構成は次に影響しません:
ToolsNetおよびToolsTalkに送信される最終トルク値:PrT補正を含む最終トルク値は、常にToolsNetおよびToolsTalkに送信されます。
履歴結果とともに表示される最終トルク値。
ライブおよび履歴結果に基づくトレース。
オープンプロトコルメッセージの値。
信号。
プロトコルアダプタ。
PrT補正で最終トルクを表示:オフ/ライブ結果にPrT補正値を表示:ON
PrT補正で最終トルクを表示:オフ
[ライブ結果]ウィンドウには、PrT補正値を含まない最終トルクが表示されます。最終トルクにはPrT補正値が含まれていないため、斜体で表示されます。
ライブ結果にPrT補正値を表示:ON
[ライブ結果]ウィンドウには、関連する補正アイコン()とともにPrT補正値が表示されます。
補正値が複数ある場合は、利用可能な最新のステップに適用された補正値が表示されます。
PrT補正で最終トルクを表示およびライブ結果にPrT補正値を表示のスイッチの構成は次に影響しません:
ToolsNetおよびToolsTalkに送信される最終トルク値:PrT補正を含む最終トルク値は、常にToolsNetおよびToolsTalkに送信されます。
履歴結果とともに表示される最終トルク値。
ライブおよび履歴結果に基づくトレース。
オープンプロトコルメッセージの値。
信号。
プロトコルアダプタ。
PrT補正で最終トルクを表示:オフ/ライブ結果にPrT補正値を表示:オフ
PrT補正で最終トルクを表示:オフ
[ライブ結果]ウィンドウには、PrT補正値を含まない最終トルクが表示されます。最終トルクにはPrT補正値が含まれていないため、斜体で表示されます。
ライブ結果にPrT補正値を表示:オフ
[ライブ結果]ウィンドウには、関連する補正アイコン()およびPrT補正値が表示されません。
PrT補正で最終トルクを表示およびライブ結果にPrT補正値を表示のスイッチの構成は次に影響しません:
ToolsNetおよびToolsTalkに送信される最終トルク値:PrT補正を含む最終トルク値は、常にToolsNetおよびToolsTalkに送信されます。
履歴結果とともに表示される最終トルク値。
ライブおよび履歴結果に基づくトレース。
オープンプロトコルメッセージの値。
信号。
プロトコルアダプタ。
PrT補正で最終トルクを表示:オン/ライブ結果にPrT補正値を表示:オフ
PrT補正で最終トルクを表示:ON
[ライブ結果]ウィンドウには、PrT補正値が含まれた最終トルクが表示されます。
eHMIとSTセレクターがオンになっており、構成されている場合、PrT補正値が含まれた最終トルクが表示されます。
ライブ結果にPrT補正値を表示:オフ
[ライブ結果]ウィンドウには、関連する補正アイコン()およびPrT補正値が表示されません。
PrT補正で最終トルクを表示およびライブ結果にPrT補正値を表示のスイッチの構成は次に影響しません:
ToolsNetおよびToolsTalkに送信される最終トルク値:PrT補正を含む最終トルク値は、常にToolsNetおよびToolsTalkに送信されます。
履歴結果とともに表示される最終トルク値。
ライブおよび履歴結果に基づくトレース。
オープンプロトコルメッセージの値。
信号。
プロトコルアダプタ。
スキャナーの構成
このメニューで、スキャナ構成を追加できます。スキャナは、コントローラでスキャンされたストリングを処理するか、外部システムに渡すように構成できます。スキャンされたストリングが渡される場合、コントローラはストリングを基にタスクを選択しませんが、出力信号でストリングを外部装置に渡します。
スキャナの追加と通過の有効化
構成 > スキャナで右上にあるプラス記号を選択します。
スキャナ構成に名前を付けます。
パススルーを有効にするには、[編集]を選択し、[パススルーモード]を[オン]に設定します。
本セクション内
スキャナ構成
スキャナを用いて、適切なバッチシーケンスを選択するための情報を含むバーコード文字列または QR コードを読み取ります。
スキャナは、ソースタブで構成します。
スキャナは、指定してテキストの文字列を構成するよう組み込んだ文字を読み込みます。このテキスト文字列は、コントローラで指定した事前に定義された文字列に一致し、両者が一致する場合は、予め定義された文字列に連結されたバッチシーケンスが選択されます。
最大 1024 文字の長さのバーコード文字列を読み取ることができます。これは、ASCII テーブルの位置32~126の文字を含めることができます。バーコードが 1024 文字より長い文字列を含む場合、文字列の残りの部分は、すなわち位置 1025 から前の部分は廃棄されます。
スキャナの構成
スキャナ自体は、US キーボードを使ってセットアップする必要があります。スキャナは、バーコードの文字列を終了するためのキャリッジ リターン文字を発行します。
有効なスキャナ
Power Focus XCPower Focus XC コントローラで使用するために検証したスキャナのリストについては、お近くのアトラスコプコ販売代理店までお問い合わせください。
[コントローラ]タブの使用
Power Focus XCPower Focus XC コントローラーのシステム管理タスクは、コントローラーメニューで扱います。メニューは、コントローラー GUI、Web GUI、またはTools Talk 2 GUI を介してアクセスします。
インテリジェントアプリケーションモジュール
インテリジェントアプリケーションモジュール (IAM) は、コントローラ内にある不揮発性記憶装置です。ストレージモジュールには、すべてのコントローラのプログラム、構成、結果が含まれます。特定のモジュールは、追加で読み込まれた機能項目も含む場合があります。
利用可能な IAMS とその機能の完全なリストについては、アトラスコプコの販売担当者にお問い合わせください。

ソフトウェア
Power Focus XCPower Focus XC コントローラで利用できるソフトウェアの 2 つのバージョンのバージョン番号は、ソフトウェアタブの下にあります。
複数のコントローラ上で更新を行う場合、第 2 バージョンのコントローラソフトウェアをインストールしておくと便利です。更新されたソフトウェアへの製品の切り替え準備ができれば、新しいソフトウェアバージョンの有効化は、Web GUI または ToolsTalk を備えたリモートコンピューターから、コントローラ GUI 上でローカルに行います。
新しいソフトウェア配布は、コントローラの USB ポートにソフトウェアを含む USB フラッシュドライブを接続するか、Web GUI を使用することにより、どちらにもインストールできます。
ソフトウェア更新オプションは、PC からコントローラ GUI にアクセスするときのみ表示されます。有効なソフトウェアバージョンを備えた大容量記憶装置が USB ポートに挿入されると、ソフトウェアを更新するためのプロンプトが表示されます。
ソフトウェア更新ファイルは解凍せずに、USBフラッシュドライブのルートディレクトリにある PFImages という名前のフォルダに保存する必要があります 。
ソフトウェアのアップグレード中に予期しない障害が発生すると、データが失われる可能性があります。
ソフトウェアバージョンをアップグレードする前に、「すべてのコントローラー情報」をエクスポートして、コントローラー構成のバックアップを取ることをお勧めします。
USB 経由のコントローラソフトウェアの更新
USBフラッシュドライブをコントローラに接続します。インストールウィザードが自動的に起動します。
いくつかのソフトウェアのバージョンが USB フラッシュドライブで使用可能な場合、異なるソフトウェアのアップグレードファイルのリストが表示されます。
インストールを完了するには、インストールするソフトウェアのアップグレードファイルを選択し、指示に従います。
USB フラッシュドライブは、利用可能なパーティションがあり、Linux 用に動作するようフォーマットする必要があります。可能なフォーマットは、例えば、FAT または NTFS です。
Do not remove the USB device or disconnect the IAM until the upgrade is completed.
Web GUI 経由のコントローラソフトウェアの更新
[コントローラ]メニューで、[ソフトウェア]に移動し、 [ソフトウェアの更新]を選択します。次に、[参照]をクリックします。
ソフトウェアで .zip ファイルを参照、選択して、指示に従ってインストールを完了させます。
ハードウェア
ハードウェアタブには、モデル指定とシリアル番号、正常性、タッチスクリーンの校正、およびコントローラ内の様々な電子機器ボードに関する情報といったコントローラの情報が含まれています。
本セクション内
正常性
正常性ビューには、バッテリ状態やコントローラ温度に関する情報が含まれています
バッテリーステータス
[コントローラ] > [ハードウェア] > [正常性]
コントローラのフロントパネル内にある Power Focus XCPower Focus XC バッテリは、内部クロックなどの一部のシステム要素に対するバックアップ電源として機能します。バッテリの状態は一日一回、さらにコントローラの再起動時に更新されます。バッテリが完全に空に近い状態になると、警告(3011)が表示されます。警告がポップアップ表示されたときは、できるだけ早くバッテリを交換しなければなりません。
コントローラ温度
[コントローラ] > [ハードウェア] > [正常性]
コントローラの温度は、Power Focus XCPower Focus XC によって継続的に監視されます。サポートされる温度単位は、摂氏(℃)華氏(°F)ですが、摂氏がデフォルトの単位です。コントローラの再起動は必要とせずに、2 つの単位間で切り替えることが可能です。コントローラの温度が最高温度を超えると、ドライブステージが無効になり、警告(3010)が表示されます。ドライブステージは、コントローラ温度が温度制限を下回ったときに再び有効になります。
ディスプレイから、または Web GUI を通して、ユーザーは、測定が行われる際のタイムスタンプとともに測定された最新のコントローラ温度にアクセスすることができます。
エクスポート/インポート
エクスポート/インポートタブはユーザーが次のいずれかの操作を実行できるようにします。エクスポート、インポート、および自動バックアップ。
[エクスポート]ウィンドウでは、ユーザーによるコントローラーの構成、設定、結果、およびイベントのエクスポートがサポートされています。さらに、ツールログをエクスポートすることも可能で、アトラスコプコのサービス担当者と共有して、ツールに関する問題のトラブルシューティングを行うことができます。
[インポート]ウィンドウでは、ユーザーがコントローラーの構成と設定をインポートできます。
同時に有効にすることが可能なエクスポートまたはインポートは1つのみです。進行中のエクスポート/インポートがある最中に新しいエクスポート/インポートを開始しようとすると、拒否されます。
自動バックアップウィンドウでは、ユーザーによるバックアップファイルの自動生成がサポートされています。
It is possible to export data by using:
Web GUI
ToolsTalk 2
Mobile GUI (export to device)
USB flash drive, in Mobile GUI
USB フラッシュドライブは、フォーマットして、Linux 用に動作するためのパーティションを設ける必要があります。可能なフォーマットは、例えば、FAT または NTFS です。
It is possible to import data by using:
Web GUI
ToolsTalk 2
エクスポート/インポートプロセス中に、進行状況バーは、エクスポート/インポートが進行中であることをユーザーに通知します。エクスポート/インポートの実行時間は、結果、イベント、およびログファイルの数によって異なります。
コントローラー間のエクスポートとインポート
コントローラーには、さまざまな機能を備えたさまざまなIAMタイプがある場合があります。
コントローラーは、現在のタイプの IAM モジュールに適用可能なすべての構成をエクスポートできます。
コントローラーは、異なるタイプの IAM モジュールからエクスポートしたファイルをインポートすることはできません。これは、ToolsTalk 2 を使用する場合にも該当します。
「すべてのコントローラー情報」のエクスポート
コントローラの構成、設定、結果、およびイベントをエクスポートして、さらに処理することができます。エクスポートの一部は、ケーブルツールと接続されたワイヤレスツールの両方から実行されます。
エクスポートに含まれるすべてのデータは、ファイル「PFExport_<IAM 名>_<日時 (表示される下位の値は秒)>.tar.gz」に保存されます。これには、次のファイルとディレクトリが含まれます:
「PFExport_<日時> _Results.csv」 – 利用可能なすべての結果
結果はCSV形式のテキストファイルでエクスポートされます。最新の実行結果は、最初のCSVファイルです。
締め付けと緩めについて、次の結果情報をエクスポートすることができます:
結果情報 | Power Focus 6000 - 締め付けプログラム | Power Focus 6000 - マルチステッププログラム |
|---|---|---|
識別番号 | - | - |
締め付けのタイプ | X | X |
仮想ステーション名 | X | X |
VIN(識別子文字列) | X | X |
日時 | X | X |
独自のツール識別子 | X | X |
バッチシーケンス名 | X | X |
バッチシーケンスカウンタ | X | X |
バッチカウント | X | X |
ボルト名 | - | - |
合計ステータス | - | - |
総ステータス情報 | - | - |
ステータス | X | X |
ステータス情報 | X | X |
モード名 | - | - |
締め付けプログラム/マルチステップ名 | X | X |
停止エラー | - | X |
エラー | - | X |
失敗ステップ | - | X |
チャンネル | - | - |
目標トルク (Nm) | X | X |
最終トルク (Nm) | X | X |
目標角度(度) | X | X |
開始最終角度 (Nm) | X | X |
最終角度(度) | X | X |
ランダウン角度(度) | X | - |
残留トルクの相関係数 | X | X |
経過時間 (s) | - | X |
角度下限(度) | X | X |
角度上限(度) | X | X |
トルク下限 (Nm) | X | X |
トルク上限 (Nm) | X | X |
パルス数 | X | - |
シャットオフ時の電流 (A) | X | X |
TrueAngle補正(度) | X | X |
ランダウン完了までの時間 (ms) | X | - |
最終トルクまでの時間 (ms) | X | - |
ターゲットテキスト | X | X |
ステップデータ | - | X |
セルフタップトルク | X | X |
プリベイリングトルク | X | X |
ランダウン角度トリガー | X | X |
フィールドの区切り文字と数値の形式は、言語設定によって異なります:
言語 | 日付/時刻 | フィールド区切り記号 | 数値形式 |
|---|---|---|---|
英語(en_US) | MM/dd/yyyy hh:mm:ss | , | 123.456 |
チェコ語(cs) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
ドイツ語(de_DE) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
スペイン語(es_ES) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
フランス語(fr_FR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
韓国語(ko_KR) | yyyy-MM-dd hh:mm:ss | , | 123.456 |
イタリア語(it_IT) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
日本語(ja_JP) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
ポルトガル語(pt_BR) | Dd/MM/yyyy hh:mm:ss | ; | 123,456 |
ロシア語(ru_RU) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
スウェーデン語(sv_SE) | yyyy-MM-dd hh:mm:ss | ; | 123,456 |
中国語(zh_CN) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
「PFExport_<日時>_Events.csv」 – 利用可能なすべてのイベント
次のイベント情報は、CSV形式のテキストファイルでエクスポートされます。
重要度
Date (日付)
Time (時間)
コード
説明
イベントをトリガーした仮想ステーション (PF6000-ハンドヘルド専用にエクスポート)
「/settings」 - 設定と構成 (インポートで使用)
「jsonConfigurations.zip」 - マルチステップの締め付けおよび緩めプログラムは、.json ファイルとしてエクスポートされます(MID2500で使用)
「atlas_sys_d.zip」 - ドライブアプリケーションからのログファイル
「atlas_sys_i.zip」 - ITアプリケーションからのログファイル
「atlas_protocol_log.zip」 – 外部プロトコルアダプタからのログファイル
「exportInfo.txt」 - AMとコントローラーに関する情報を含むテキストドキュメント
「atlas_plc.zip」 - PLC 構成
「licenseInformation.zip」 – ライセンス情報とシステム機能
「すべてのコントローラー情報」のエクスポート方法
ホームビューで、[コントローラー]タブを選択します。次に、左側で[エクスポート/インポート]タブを選択します。
[エクスポート]ウィンドウで、ドロップダウンメニューを開き、[すべてのコントローラー情報]を選択します。
[エクスポート]ウィンドウで、[エクスポート]を選択します。
エクスポートプロセスの最後に、エクスポートポップアップウィンドウにより、エクスポートが完了したことを確認します。
PF/IXBExport_<IAM 名>_<日時>.tar.gz ファイルが自動的にダウンロードされます。
「設定と構成」のエクスポート
コントローラの構成と設定のみをエクスポートすることもできます。
エクスポートされたデータは、IAM名とエクスポートされた日時で識別される圧縮ファイルに保存されます。
ファイル内のデータには、コントローラーのすべての構成と設定が含まれているため、エクスポートファイルをインポートして、同じバージョンまたは新しいリリースバージョンで別のコントローラーをセットアップすることができます。
エクスポートされたデータには、IAMとコントローラーに関する情報、およびMID2500ソリューションで使用される事前にフォーマット済みのマルチステップ締め付けおよび緩めプログラムも含まれます。
「設定と構成」のエクスポート方法
ホームビューで、[コントローラー]タブを選択します。次に、左側で[エクスポート/インポート]タブを選択します。
[エクスポート]ウィンドウで、ドロップダウンメニューを開き、[設定と構成]を選択します。
[エクスポート]ウィンドウで、[エクスポート]を選択します。
エクスポートプロセスの最後に、エクスポートポップアップウィンドウにより、エクスポートが完了したことを確認します。
PFExport_<IAM 名>_<日時>.tar.gz ファイルが自動的にダウンロードされます。
「接続ツールからのログ」のエクスポート
ツールログのエクスポートにより、サービス技術者はツールログデータをアトラスコプコのサービス担当者と共有して、ツールの問題のトラブルシューティングを行うことができます。
次のツールからツールログをエクスポートできます:STB、SRB、TBP/TBP-S。
ツールログをエクスポートするには、ツールをコントローラーに接続する必要があります。仮想ステーションにツールが割り当てられている必要はありません。
ツールログのエクスポートに含まれるすべてのデータは、ファイル「PFExport_<IAM 名>_<日時 >.tar.gz」に保存されます。これには、次のファイルとディレクトリが含まれます:
「atlas_tool_i.zip」 – 利用可能なすべての結果
接続されたツールごとに、個別のファイルが作成されます。ツールログファイルのファイル形式は「tool-<ツールタイプ> -<ツールシリアル番号>.log」です。
「ExportInfo.txt」 - IAM、コントローラー、および接続されたツールに関する情報を含むテキストドキュメント
「接続ツールからのログ」のエクスポート方法
ホームビューで、[コントローラー]タブを選択します。次に、左側で[エクスポート/インポート]タブを選択します。
[エクスポート]ウィンドウで、ドロップダウンメニューを開き、[接続ツールからのログ]を選択します。
[エクスポート]ウィンドウで、[エクスポート]を選択します。
エクスポートプロセスの最後に、エクスポートポップアップウィンドウにより、エクスポートが完了したことを確認します。
PFExport_<IAM 名>_<日時>.tar.gz ファイルが自動的にダウンロードされます。
「結果」のエクスポート
コントローラから締め付け結果のみをエクスポートすることも可能です。
「結果」のエクスポート方法
ホームビューで、[コントローラー]タブを選択します。次に、左側で[エクスポート/インポート]タブを選択します。
[エクスポート]ウィンドウで、ドロップダウンメニューを開き、[結果]を選択します。
[エクスポート]ウィンドウで、[エクスポート]を選択します。
エクスポートプロセスの最後に、エクスポートポップアップウィンドウにより、エクスポートが完了したことを確認します。
マルチスピンドルシステム(固定式)の場合、自動的にダウンロードされるエクスポートファイルは .zip 形式であり、それ以外のファイルは .csv 形式です。
コントローラ構成と設定のインポート
ユーザーがコントローラーの構成と設定をインポートすると、既存の構成と設定は、インポートされたコントローラーの構成と設定に置き換えられます。
次の構成はインポートまたは選択解除できません:
コントローラネットワーク設定がインポートされない
結果とイベントがインポートされない
ライセンス割り当てがインポートされない
仮想ステーションに割り当てられたタスクが選択解除されている
「jsonConfigurations.zip」 (マルチステップの締め付けおよび緩めプログラム)がインポートされない
「licenseInformation.zip」 (ライセンス情報とシステム機能)がインポートされない
コントローラ構成と設定のインポート方法
ホームビューで、[コントローラー]タブを選択します。次に、左側で[エクスポート/インポート]タブを選択します。
[インポート]ウィンドウで、[インポート]を選択します。
情報ポップアップウィンドウは、締め付けプログラム、バッチ、アクセサリ、およびコントローラのすべての設定が、インポートされたファイルの設定に置き換えられることを確認します。
ただし、ネットワークの設定、PIN、結果、イベントはインポートされません。[続行] を選択します。
[インポート]ポップアップウィンドウで、[ファイルの選択]を選択します。次に、コントローラーにインポートするファイルを選択します。
インポートプロセスの最後に、コントローラーは自動的に再起動します。
インポートプロセスが開始前にインポートが中断された場合、またはファイルが消えた場合は、ユーザーに通知され、コントローラーを再起動する必要があります(有効な状態であることを確認するため)。
インポートプロセスが中断されたものの、ファイルが破損しておらず、存在する場合は、インポートを完了できます。
[設定] タブの操作
ネットワークの構成
Power Focus XCPower Focus XC は、アトラスコプコのソフトウェア ToolsTalk から、またはローカルエリアネットワーク(LAN)上の Web ブラウザからアクセスするように設定することができます。また、接続された PC から直接アクセスすることもできます。IPv4 プロトコルを使用します。

イーサネット設定にアクセスして変更するには、編集を選択します。
工場 Ethernet ポートのみ設定できます。サービス Ethernet ポートには、ローカルネットワークに接続してはならない指定 IP アドレス(169.254.1.1)があります。
LAN 上のコントローラへのアクセス
Select the Network menu and on the Factory Ethernet Port window, click Edit. Then, set Enabled to On to alter the Ethernet settings.
ネットワークケーブルを工場 Ethernet ポートに接続し、次に手動で必要な情報を指定するか、適宜、DHCP サーバーから提供される情報を使用します。必要な情報は、
IP アドレス
サブネットマスク
Gateway (ゲートウェイ)
この情報は、ローカルのシステム管理者から提供されます。
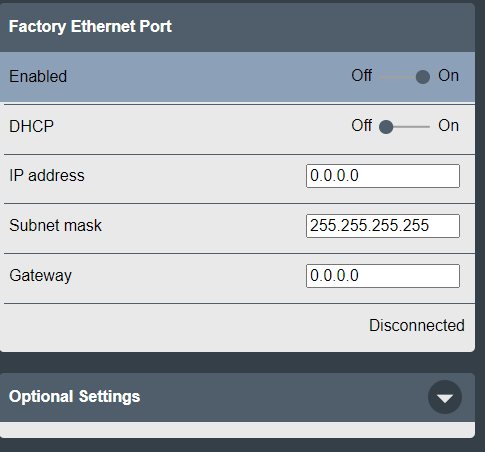
手動オプションを使用する場合、DNS サーバーの使用で利用可能なオプションの設定があります。
Web GUI を通じたコントローラへのアクセス
Connect one end of a straight-through unshielded Ethernet cable (RJ45) to a computer and the other end to the Ethernet cable connector (service port) on the controller.
Open a web browser on the computer and enter the web address shown under the Ethernet cable connector (service port).
Web GUI を通じたコントローラへのアクセス
On the front part of the controller, scan the QR code on the left with the camera of a mobile device.
Scan the QR code on the right with the camera of a mobile device.
プロトコルの構成
Power Focus XCPower Focus XC は、アトラスコプコのライセンスマネージャを実行しているサーバーだけでなく、2 つのアトラスコプコソフトウェア ToolsTalk と ToolsNet と通信するように設定することができます。ToolsTalk は、1 つ以上のコントローラを構成するのに使用します。ToolsNet は、結果レポートを処理するのに使用します。
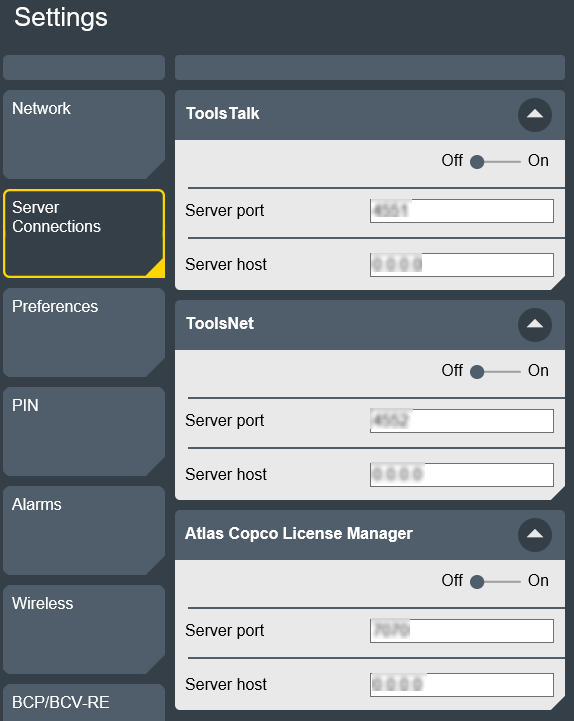
ToolsTalk接続の構成
ToolsTalk にコントローラーを接続するには、コントローラー上の ToolsTalk プロトコル設定を構成して有効にします。
On the home view, go to the Settings tab and select Server Connections on the left pane.
ToolsTalkウィンドウで、次のパラメーターを設定します:
フィールド
説明
オン/オフ
ToolsTalk サーバーとの通信を有効/無効にします
サーバーポート
ToolsTalk サーバーポート
サーバーホスト
ToolsTalk サーバーの IP アドレス
適用を選択します。
ToolsTalk接続ステータスを表示するには、[結果]アイコンを選択し、[ライブ結果]ビューに移動します。 Then, select the Protocol Connection button  . 表示されるダイアログボックスで、[サーバー接続]タブを選択します。
. 表示されるダイアログボックスで、[サーバー接続]タブを選択します。
ToolsTalkの構成方法については、ToolsTalk2ユーザーガイドを参照してください。
ToolsNet接続の構成
ToolsNetにコントローラーを接続して締め付け結果を収集するには、コントローラーのToolsNetプロトコル設定を構成して有効にします。
On the home view, go to the Settings tab and select Server Connections on the left pane.
ToolsNetウィンドウで、次のパラメーターを設定します:
フィールド
説明
オン/オフ
ToolsNet サーバーとの通信を有効/無効にします
サーバーポート
ToolsNet サーバーポート
サーバーホスト
ToolsNet サーバーの IP アドレス
適用を選択します。
ToolsNet接続ステータスを表示するには、[結果]アイコンを選択し、[ライブ結果]ビューに移動します。次に、ボタンを選択します。表示されるダイアログボックスで、[サーバー接続]タブを選択します。
ToolsNetの構成方法については、ToolsNet 8ユーザーガイドを参照してください。
ライセンスマネージャの構成
アトラスコプコのライセンスマネージャはコントローラに接続され、プロトコルの設定は、設定メニューのサーバー接続タブからコントローラ上で有効になります。
フィールド | 説明 |
|---|---|
オン/オフ | アトラスコプコのライセンスマネージャとの通信を有効/無効にします。 |
サーバーホスト | アトラスコプコのライセンスマネージャサーバーの IP アドレス |
サーバーポート | アトラスコプコのライセンスマネージャサーバーのポート |
プリファレンスの構成
[環境設定] には、日時、言語、トルクの単位、起動画面といった一般的な設定が含まれています。
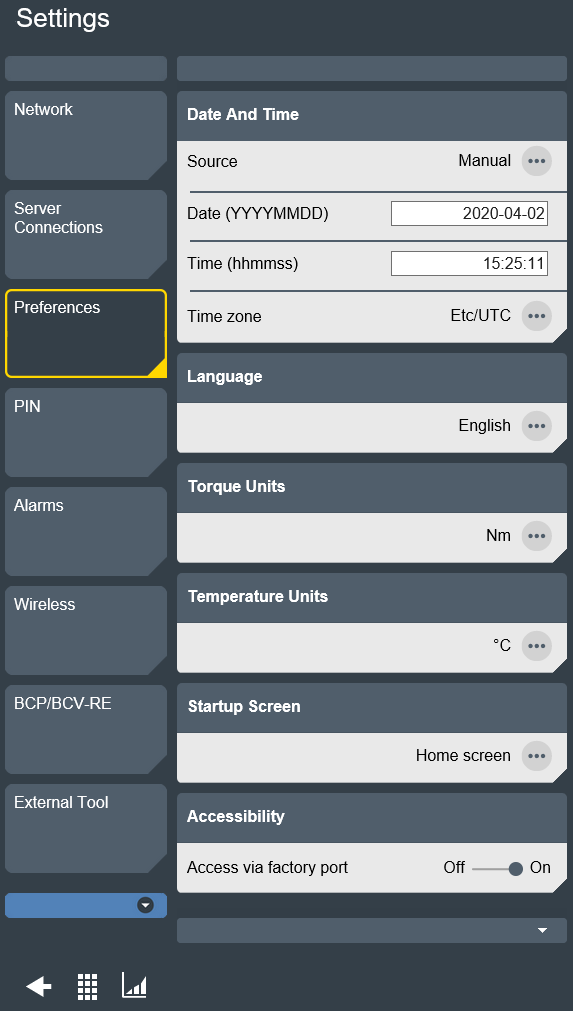
日付と時刻の構成
日時は、イベントや結果が生じたときに正しいタイムスタンプを取得するように設定する必要があります。
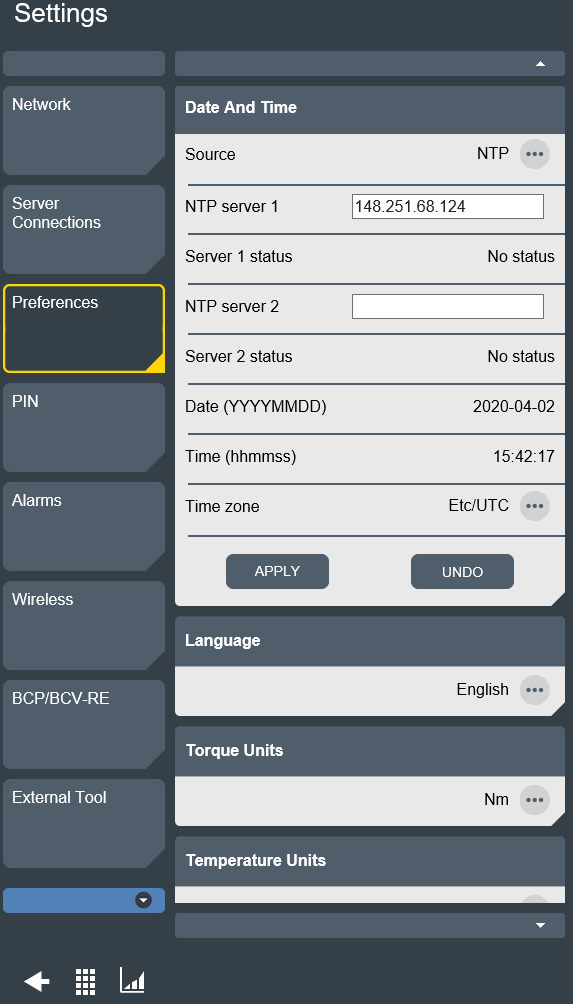
時間は、次の 3 つの利用可能なソースのいずれかから取得します。
マニュアル
NTP
ToolsNet
ソースが手動に設定されている場合、日付、時刻およびタイムゾーンは手動で設定します。
ソースが NTP に設定されている場合、日付と時刻は、GUI で定義されている NTP サーバーから取得します。
ソースが ToolsNet に設定されている場合、日付と時刻は、ToolsNet サーバーから取得します。
フィールド | 説明 |
|---|---|
ソース | 時刻を取得するためのソース。 |
日付(YYYYMMDD) | ソースが手動に設定されている場合は、手動で入力した日付。 |
時間(hhmmss) | ソースが手動に設定されている場合は、手動で入力した時刻。 |
タイムゾーン | タイムゾーン。現地のタイムゾーンまたは UTC(協定世界時)などの標準タイムゾーンのいずれか |
NTP サーバー | コントローラに対して日時を提供する NTP サーバーの IP アドレス。 |
表示するコントローラ言語の構成
コントローラ GUI は、12 の言語に翻訳されています。GUI の言語を変更するには、
現在使用中の言語の名前の横にある矢印をタップするかクリックします。
リストから言語を選択します。
言語の変更はすぐに反映されます。
言語 | コントローラで表示のとおり |
|---|---|
英語 | 英語 |
チェコ語 | Čeština |
ドイツ語 | Deutsch |
スペイン語 | Español |
フランス語 | Français |
韓国語 | 한국어 |
イタリア語 | Italiano |
日本語 | 日本語 |
ポルトガル語 | Português |
ロシア語 | Русский |
スウェーデン語 | Svenska |
中国語 | 中文 |
表示されるトルク単位の構成
トルクの値や結果で使用する単位を選択します。トルクの結果は、締め付けを行った後と、結果リストに保存した際の両方で、選択した単位で表示されます。
コントローラの GUI で使用されるトルク単位を変更するには、
現在使用中の単位の名前の横にある矢印をタップするかクリックします。
リストから単位を選択します。
トルクの単位の変更はすぐに反映されます。
ユニット | 説明 |
|---|---|
cNm | センチニュートンメートル |
dNm | デシニュートンメートル |
Nm | ニュートンメートル |
kNm | キロニュートンメートル |
in·lbf | インチ・ポンド力 |
ft·lbf | フィート・ポンド力 |
in·ozf | インチ・オンス力 |
ft·ozf | フィート・オンス力 |
gf·cm | グラム力・センチメートル |
kgf·cm | キログラム力・センチメートル |
kgf·m | キログラム力・メートル |
表示されるトルク単位の構成
The temperatures in the controller can be shown in Celsius degrees or in Fahrenheit degrees.
コントローラの GUI で使用されるトルク単位を変更するには、
On the home view, go to the Settings tab, select Preferences on the left pane and go to the Temperature Units window.
Select the ellipsis icon beside the name of the unit currently in use.
リストから単位を選択します。
トルクの単位の変更はすぐに反映されます。
使用可能なトルク単位 ユニット
説明
°C
Celsius degrees
°F
Fahrenheit degrees
スタートアップ画面の構成
コントローラーの起動時におけるデフォルト画面はホーム画面です。起動画面を結果画面に変更することが可能です。
設定で起動画面の変更するには、コントローラーの再起動か Web GUI を最新の情報に更新する必要があります。
Factory Port Accesibility
On the home view, go to the Settings tab, select Preferences on the left pane and go to the Accessibility window.
Slide the Access via factory port selector to Off to access the GUI through the factory port.
The Access via factory port selector is in On position by default.
工場ポートからGUIにアクセスする場合、それ以上の変更を加えることはできません。
ツールアラームの構成
アラームは、コントローラに接続されたツールのメンテナンスや校正を実行するタイミングを制御するよう設定します。 The tool service interval and other relevant information about the connected tools can be found on the Tool tab.
To access to the tool alarms, go to he Settings tab on the home view and select Alarms on the left pane.
Windows | 説明 |
|---|---|
点検インジケータアラーム | ツールのサービス間隔に達したときにアラームを有効にします。 |
アラーム後のツールロック | サービス間隔に達したときにツールをロックします。 |
校正アラーム | コントローラに接続されたすべてのツールに対して、ツール校正アラームを有効にします。 |
Oil supervision alarm | コントローラに接続されたすべてのツールに対して、ツール校正アラームを有効にします。 Slide the Tool lock after alarm option to On to lock the corresponding tool when this alarm goes off. |
無線設定の構成
コントローラに搭載されている無線設定で、WLAN と Bluetooth の使用を有効にします。
[設定]メニューで[無線]タブを選択します。
ツールに合わせて (WLAN 対応ツールには IRC-W、Bluetooth 対応ツールには IRC-B が記載)、有効をオンに設定します。
イベント設定の構成
以下のいずれか一つ、またはいくつかについて、コントローラで使用可能なイベントを設定できます。
確認済み
ログイン済み
表示済み
結果の構成
[結果]メニューで、ユーザーは、[結果リスト]に表示される結果のラベル名を構成できます。
[結果ステータス] 名の変更
設定に移動してから結果に移動し、カスタマイズされた詳細ステータスをクリックします。
変更する [ステータス名] を検索します。
右側にある新規ステータス名の対応フィールドに新しい名前を書き込みます。
リセット
出荷時設定リセットコントローラー
コントローラーを工場出荷時の元の設定に戻すことができます。
コントローラーをリセットすると、すべての設定、構成、および履歴データが削除されます。工場出荷時の状態へのリセットは、リセットが確実に必要な場合にのみ行ってください。
コントローラーの工場出荷時へのリセット実行
ホームビューで、[設定]タブを選択します。次に、左側で[リセット]を選択します。
[コントローラーの工場出荷時設定へのリセット]ウィンドウで、[リセット]を選択します。
すべてのデータが削除されることを警告するポップアップウィンドウが表示されます。次に、[はい]を選択します。
コントローラーが再起動し、新しい設定が有効になります。
結果のクリア
コントローラーに保存されている結果やイベントは削除することができます。
結果とイベントの削除
ホームビューで、[設定]タブを選択します。次に、左側で[リセット]を選択します。
[結果のクリア]ウィンドウで、[クリア]を選択します。
すべての結果とイベントが削除されることを警告するポップアップウィンドウが表示されます。次に、[はい]を選択します。
コントローラーの電源を切り、30秒間待ってからもう一度電源を入れます。
Mobil GUI
[統計]タブの操作
Tasks are configured in the Task menu. A task runs a tightening program and can be monitored from the Mobile GUI. The results of the task are presented in the Results menu.
To create a tightening program, create a task and select a strategy, either Tighten to Torque or Tighten to Torque plus Angle.
PF6000 締め付けプログラムでは、締め付けを行うためにパラメータを設定する必要があります。 Entering a value for Target Torque is mandatory, as well as Target Angle if Tighten to Torque plus Angle was chosen. Other settings are optional, such as Program name, Peak Torque and Angle. さらに、トルク、ナットの回転角度が維持しなければならない範囲を加えることで、実行中の締め付けを監視することも可能です。
It is possible to run two types of tightening programs from the Mobile GUI, Tighten to Torque and Tighten to Torque plus Angle.
Multistep programs and other types of tightening programs are available in the Web GUI, and should not be assigned to the Virtual Station 1, to avoid incorrectly displayed results.
締め付けプログラムの作成
[ソース]タブに移動します。
GUIの右上隅にあるプラスアイコンを選択します。
締め付け戦略のプログラミング
ソースバッチに名前を付けます
Enter the target torque.
変更を保存するには、<translate-no-ac>SAVE</translate-no-ac> を選択します。 Changes are not saved automatically.
Select Undo to discard changes.
締め付けプログラムの編集
On the Task tab, slide the Edit selector to On.
On the tightening program to be edited, select the ellipsis icon.
Do the desired modifications on the tightening program.
変更を保存するには、<translate-no-ac>SAVE</translate-no-ac> を選択します。 Changes are not saved automatically.
Select Undo to discard changes.
締め付けプログラムの削除
On the Task tab, slide the Edit selector to On.
On the tightening program to be deleted, select the remove icon.
[コントローラ]タブの使用
Power Focus XCPower Focus XC コントローラーのシステム管理タスクは、コントローラーメニューで扱います。メニューは、コントローラー GUI、Web GUI、またはTools Talk 2 GUI を介してアクセスします。
本セクション内
構成のエクスポート
The export function is used to export tightening results accessible in the Reports menu for analysis in external programs.
エクスポート機能は、次の操作のために使用します。
Export tightening results and events for further processing from the cable tool.
アトラスコプコのサービスエンジニアからのデバッグ支援のために、ting ログファイルをエクスポートします。
別のコントローラに設定をコピーするために使用できるコントローラ構成をエクスポートします。
Exporting Data from the Mobile GUI
To export data from the mobile interface, do the following:
[コントローラ]タブに移動します。
In the Export menu, tap the Ellipsis icon (...).
オプションを1つ選択します:
すべてのコントローラ情報
設定と構成
接続ツールからのログ
結果
Tap To Device to download the selected data into the mobile device.
Tap To USB to download the selected data into a correctly formatted USB storage device connected to the USB port on the front part of the controller.
All controller information and Settings and configurations do not include information about the connected tools.
設定および構成オプションでは、設定のみエクスポートするため、実行にはあまり時間がかかりません。
For STB, SRB, and TBP tools, it is only possible to export logs.
ツールがコントローラに接続されていない場合に接続ツールからのログが選択された場合もファイルがエクスポートされる点にご注意ください。
コントローラからの締め付け結果のエクスポートのみに使用。
エクスポートされたファイル
エクスポートされたファイルは、設定をもつバイナリファイルとともに、結果とイベントをもつ 2 つの文字区切り値(csv)ファイルを含む圧縮ファイルのアーカイブです。
設定と構成を選択すると、結果またはイベントを伴うファイルはアーカイブにエクスポートされません。
ファイル | 説明 |
|---|---|
PFExport__<Controller name>_<Time stamp>_Events.csv | 次の情報を含むセミコロンで区切られたファイル:
|
PFExport__<Controller name>_<Time stamp>_Results.csv | 次の情報を含むセミコロンで区切られたファイル:
|
ExportInfo.txt | コントローラの設定およびコントローラソフトウェアに関する情報 |
設定/settings.bin | 以下に示すような締め付けプログラム、バッチ設定、アクセサリ設定、コントローラ設定をすべて含むバイナリファイル:言語、トルクの単位、フィールドバスデータ、日時、および結果の表示 |
エクスポートされた .csv ファイルの形式
コントローラの言語設定に応じて、エクスポートされた .csv ファイルは異なる文字を使用してフィールドを区切ります。言語の書式設定の詳細については、次の表を参照してください。
言語 | 日付/時刻 | フィールド区切り記号 | 数値形式 |
|---|---|---|---|
英語(en_US) | MM/dd/yyyy hh:mm:ss | , | 123.456 |
チェコ語(cs_CZ) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
ドイツ語(de_DE) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
スペイン語(es_ES) | dd/MM//yyyy hh:mm:ss | ; | 123,456 |
フランス語(fr_FR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
韓国語(ko_KR) | yyyy-MM-dd hh:mm:ss | , | 123.456 |
イタリア語(it_IT) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
日本語(ja_JP) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
ポルトガル語(pt_BR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
ロシア語(ru_RU) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
スウェーデン語(sv_SE) | yyyy-MM-dd hh:mm:ss | ; | 123,456 |
中国語(zh_CN) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
コンピューターの言語設定によっては、エクスポートされた .csv ファイルを開く際に書式設定の問題が発生する場合があります。問題を回避するには、コントローラとコンピュータで使用されている言語を必ず一致させてください。
レポートと統計
このセクションでは、使用可能なレポートと統計情報について学習できます。
Web GUI
[レポート]タブの操作
結果
本セクションでは、Power Focus XCPower Focus XC コントローラで締め付け結果にアクセスする方法と、さまざまな結果表示で示される情報を読み取る方法について説明します。各締め付け後に利用できるライブ結果表示と、レポートメニューの結果で利用できる過去の結果表示の両方について説明します。
締め付けが行われると、結果はコントローラで保存されます。結果はまた、ToolsNet などの外部システムに送るか、エクスポート機能を使って分析のためにエクスポートすることができます。
ライブ結果
The Live Results tap shows results from the different virtual stations on the controller.
本セクションでは、Power Focus XCPower Focus XC コントローラで締め付け結果にアクセスする方法と、さまざまな結果表示で示される情報を読み取る方法について説明します。
イベントで示された情報を読む
詳細については、画像をポイントしてクリックしてください。
1 | 仮想ステーション名 |
2 | 結果ステータス |
3 | 締め付けプログラム名 |
4 | Message indicating the reason of the NOK result |
5 | 締め付けトルクNm |
6 | 目標トルク |
7 | 締め付け角ステータス |
8 | 目標角度 |
本セクション内
プロトコルステータスの表示
ホームビューで、[レポート]タブを選択します。左側では、結果が自動的に選択されます。
In the upper-right corner, select the Protocol connection button
. [プロトコルステータス]ダイアログボックスが表示されます。ダイアログボックスのタブには、次の情報が表示されます:
タブ
説明
オープンプロトコル
開いているプロトコル接続のステータスを表示します:OK/NG
サーバー接続
ToolsTalkおよびToolsNetサーバーへの接続のステータスを表示します:OK/NG
構成設定を有効/無効に変更するには、 [設定] > [サーバー接続]に移動し、構成するサーバーを選択します。
起動ツールのステータス
さまざまなシステムアダプタの起動ツールのステータスを表示します。OK/NG
[閉じる]を選択します。
保存された結果
The controller stores the result for every tightening or loosening performed.Power Focus XCPower Focus XC can store up to 10,000 results.
保存された結果を表示する
ホームビューで、[レポート]タブを選択します。 Results is automatically selected on the left pane.
[結果]ウィンドウで、[すべての結果を表示]を選択します。
結果リストには次の情報が表示されます:日付:締め付けが行われた日時。
仮想ステーション:締め付けを行った仮想ステーション。
締め付けプログラム:締付けプログラムの列には、マルチステップ締付けプログラム名、またはバッチシーケンス名、続いてバッチシーケンス内の締付けプログラム名が表示されます。
結果:トルク/角度の結果
制限:[制限]列には、ユーザーが[ステップモニター]または[ステップ制限]、または[プログラムモニター]または[プログラム制限]を設定した場合にのみ値が表示されます。
ステップモニター、ステップ制限、プログラムモニター、およびプログラム制限は、最終トルクと最終角度に適用されます。
詳細:締め付け/緩め結果の詳細です。
トレースチェックボックス:トレースチェックボックスを選択すると、対応する結果が同期トレース結果ビューに表示されます。
[制限]列で、赤色の最小値/最大値がある場合があります。
この場合、赤色の値は、次のいずれかが発生したことを意味します:
測定値が、マルチステッププログラムで設定された最小値よりも低い場合。
測定値が、締め付けプログラムで設定された最大値よりも高い場合。
結果トレースの表示と読み取り値
ホームビューで、[レポート]タブを選択します。 Results is automatically selected on the left pane.
[結果]ウィンドウで、[すべての結果を表示]を選択します。
結果リストが [結果] ウィンドウに表示されます。必要な結果を選択します。
締め付けトレースが [トレース結果ビュー] ウィンドウに表示されます。
[トレース結果ビュー]ウィンドウには、締め付けのライフサイクルが段階的に表示されます。
締め付けが NG の場合、 トレース結果ビュー ウィンドウに、原因となったステップモニターまたはステップ制限が表示されます。
トレースグラフでは、ステップレベルでNGの締め付けを引き起こしたステップモニターまたはステップ制限が赤色で表示されます。
詳細については、画像をポイントしてクリックしてください。
1 | Result view Trace Graph |
2 | 結果表示 - 数字 |
3 | Result view Step Monitors |
4 | Pulsante di visualizzazione dei risultati |
結果ビュー - トレース
This section shows the tightening in the shape of a graph.
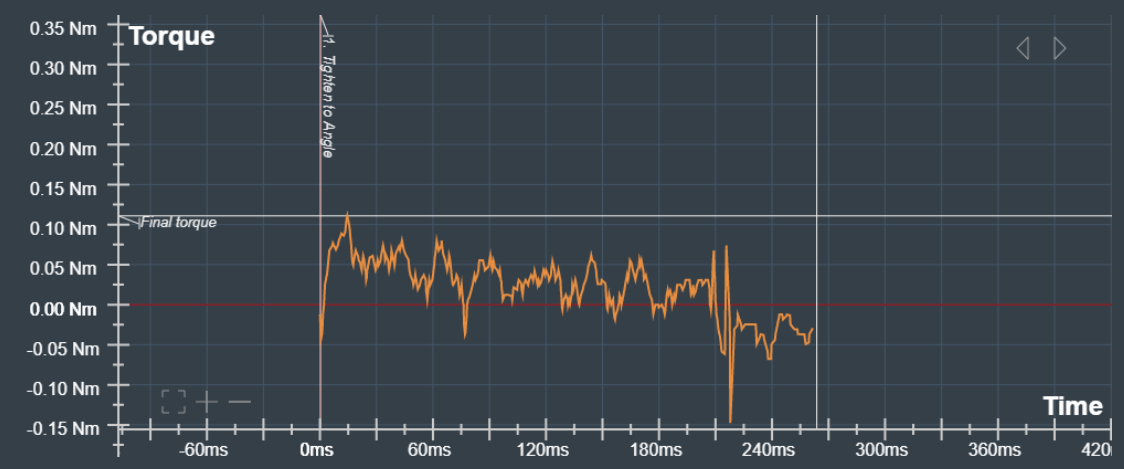
Use the arrows in the upper-right corner of the trace graph to view the different trace graphs available for the tightening result selected.
次のトレースグラフが使用できます。
トルク/時間
トルク/角度
角度/時間
速度/時間
速度/角度
勾配/時間(締め付けプログラムが勾配トレースを作成するように構成されている場合)
勾配/角度(締め付けプログラムが勾配トレースを作成するように構成されている場合)
電流/時間
電流/角度
ステップラインはトレースグラフ上にあります。
トレースグラフでは、ズームイン/ズームアウト、トレースの移動、特定のポイントのx軸とy軸の値の読み取りが可能です。
トレースグラフの左下コーナーで、「+」を選択してズームイン、「-」を選択してズームアウト、または、「正方形のアイコン」を選択してズームレベルをデフォルトビューにリセットします。
結果表示 - 数字
This section displays the result in numbers. There is also information about the tightening program, the virtual station, the date and time of the tightening, the status, etc. .This view will also display some identifiers like the VIN.
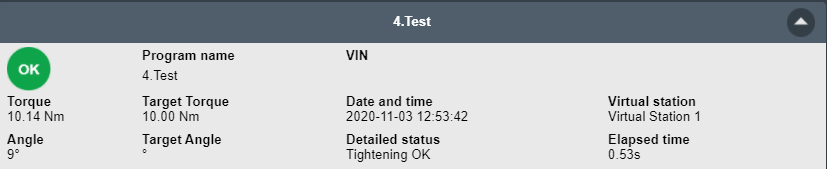
Result View - Step Monitors
This section shows a list of the tightening results with information about the step monitors used and other step information.
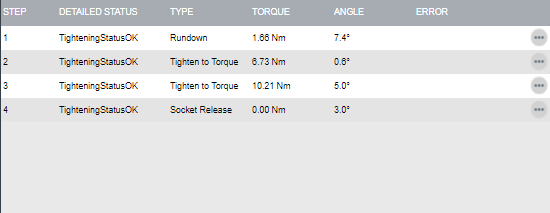
Select the ellipsis icon on the different tightening results listed to get further information.
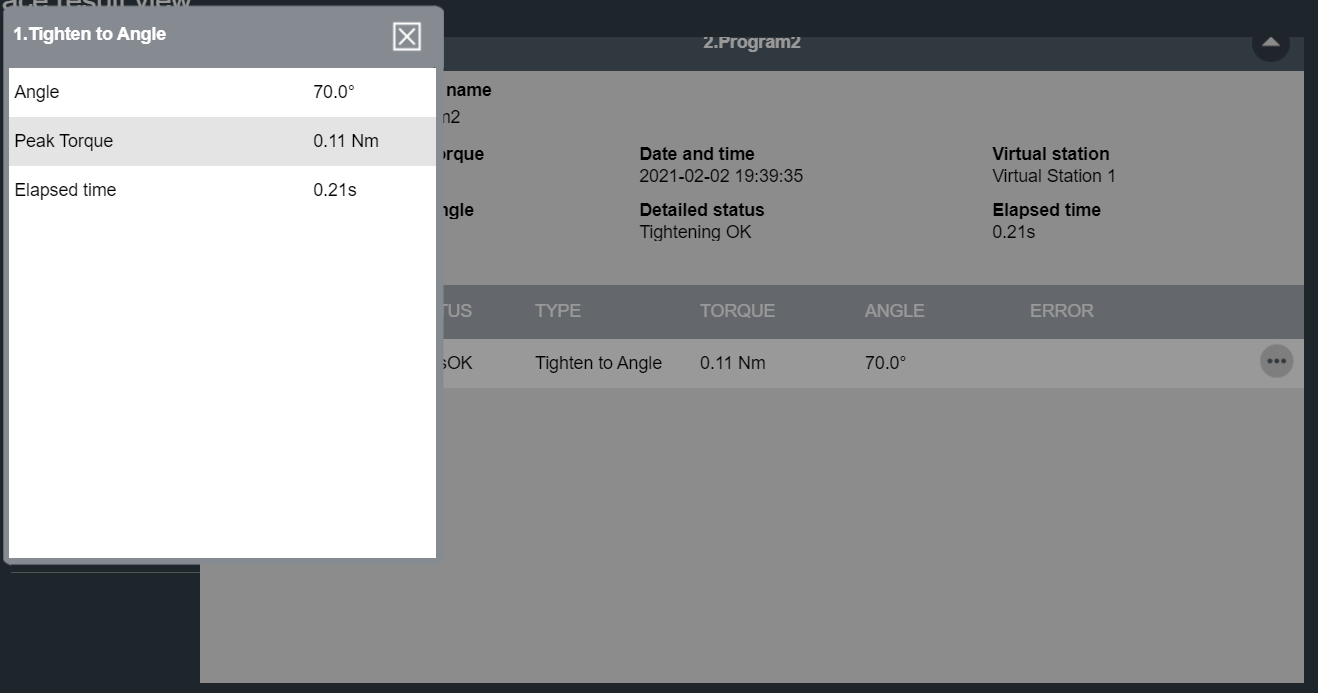
結果ビュー - 結果レポーター
リストには、結果レポーターから得られた値が表示されます。プログラムのモニター/制限に対して定義された結果レポーターがある場合、そのモニター/制限からの値が報告されます。プログラムモニター/制限に対して定義された結果レポーターがない場合、メインパスで最後に実行された結果レポーターからの値が報告されます。
同じタイプの複数のレポーターがプログラムで定義されている場合の評価順序:
プログラムモニター/プログラム制限に関する結果レポーター。
メインパスで最後に実行されたステップの監視/制限に関する結果レポーター。
対応する結果レポーターによって設定されたマルチステップ結果の最高レベルの値:
結果レポーターの最終角度によって設定された最終角度
結果レポーター最終トルクによって設定された最終トルク
結果レポーター電流によって設定された電流
本セクション内
同期トレースの表示
ソフトウェアバージョン3.5より古いバージョンのトレース同期はサポートされていません。
トレースの同期と比較
ホームビューで、[レポート]タブを選択します。左側では、結果が自動的に選択されます。
[結果]ウィンドウで、[すべての結果を表示]を選択します。
対応する結果の
 アイコンをマークして、比較するトレースを選択します。選択したトレースアイコンが青色に変わります。
アイコンをマークして、比較するトレースを選択します。選択したトレースアイコンが青色に変わります。最大10個のトレースを選択できます。
アイコンのない結果では、同期はサポートされていません。右上隅にある
 アイコンを選択して、同期トレースビューを開きます。
アイコンを選択して、同期トレースビューを開きます。 アイコンを選択すると、選択したすべての結果トレースがオフになります。
アイコンを選択すると、選択したすべての結果トレースがオフになります。[同期トレース結果ビュー]で、ドロップダウンリストから優先する[同期方法]を選択します。
右上隅の矢印でトレースタイプを選択します。
同期トレース結果ビューを以下に示します:
詳細については、画像をポイントしてクリックしてください。
1 | トレースを同期する方法と現在の同期方法の表示を選択します。 |
2 | 使用可能なトレースタイプの間で切り替えます。次のトレースグラフが使用できます。
|
3 | トレースのセクションをより詳細に調べるためのズーム方法。「+」を選択してズームイン、「-」を選択してズームアウト、または、「正方形のアイコン」を選択してズームレベルをデフォルトビューにリセットします。 マウスの右ボタンを押したまま、セクション上でマウスを動かして、マウスの右ボタンを放すことにより、特定のセクションにズームすることもできます。描かれた長方形の内側の領域は、表示する領域を定義します。 |
4 | 各結果は1つのタブで表され、締め付けが実行された時間を示します。各タブの左側にあるアイコンには、締め付けの結果が反映されます:
アイコンをクリックすると、トレースの次の表示設定の間で切り替わります:
|
5 | 一次結果トレースを変更します。 一次結果トレースは基準として使用され、x軸の値を定義します。一次結果として設定できるトレースは1つのみです。最初に選択されたトレース(左端のタブ)は、デフォルトで基準として使用されます。 |
6 | 現在選択されている結果の締め付けの詳細 |
同期方法
同期方法は、特定の値でトレースを同期するためのさまざまな戦略です。
トレースは、たとえば、ピークトルク(各トレースで到達する最大トルク)によって同期することができます。これにより、各曲線のピークトルク値がx軸でまったく同じ位置に来るまで、すべてのトレースがx軸に沿ってシフトします。
それ以降のすべての結果には、次のいずれかの方法に従ってx軸上のオフセットが指定されます
同期方法 | 説明 |
|---|---|
なし | デフォルト値。選択したトレースは同期されません。 |
ピーク/トルク | すべてのトレースはピーク値に対して同期されます。つまり、x軸上でピーク値が一次結果のピーク値と同じ位置になるように、x軸に沿ってシフトされます。 |
カスタム/トルク |
同期方法で[カスタム]が選択され、どのトレースにも構成値が含まれなかった場合、カスタム値フィールドに感嘆符が表示されます。 |
結果に同期方法と一致するトレース値がない場合、同期はできず、そのトレースは表示されません。代わりに、感嘆符が表示されます。
同期できるトレースがない場合は、 「同期できません」というエラーメッセージが表示されます。
イベント
イベントで示された情報を読む
イベントには、発生したイベントだけでなく、その内容、場所、時間を記述するいくつかのシステム情報を記述する情報が含まれています。
詳細については、画像をポイントしてクリックしてください。
1 | 見出し - システムのどの部分でイベントが関係するかを記述します。 |
2 | イベント名 - イベントの簡単な説明文章。 |
3 | 仮想ステーション - イベントがコントローラ上の仮想ステーションに関連している場合、仮想ステーション名が表示されます。 |
4 | コード - イベントを識別する一意の 4 桁の数字。 |
5 | モジュール - システムのどの部分でイベントが関係するかを記述します。 |
6 | タイプ - 情報、警告、またはエラー。 |
7 | 時間 - イベントが発生した日時。 |
イベントタイプ
イベントは、情報、警告、エラーの3つのタイプに分類されます。
Power Focus XCPower Focus XC can store up to 2,000 events.
情報イベント
情報イベントは、ユーザーまたはシステムによって実行されたアクションで発生した注意すべきイベントを通知します。情報イベントは、特定のユーザーアクションを必要としません。
警告イベント
警告イベントは、システムのパフォーマンスに影響を与えるか、損傷を招く可能性のある潜在的に深刻な状態を知らせます。
エラーイベント
エラーイベントは、継続するために、ユーザーがセットアップや構成を変更する必要がほぼ全面的ある、サービス障害のような深刻な状態を知らせます。

イベントの構成
各イベントには、確認(ACK)、記録(Log)または表示(Disp)するかどうかのデフォルト設定があります。これらの設定は、設定メニューのイベントで構成できます。
Grayed out options cannot be changed.
イベントコード
様々なタイプのイベントを使って、ユーザーに対して、システム内の特定の状態の変化または発生を通知します。イベントごとに異なるアクションが必要です。
説明されている手順の一部は、アトラスコプコのサービス担当者のみが実行できます。
特定のイベントコードの詳細については、以下のフィルターを使用するか、検索ボックスにイベントコードの検索条件を入力してください。
ログ/表示/Ack/Conf | |||||||
|---|---|---|---|---|---|---|---|
none | item | none | none | none | column | list | list |
1000 | 情報 | コントローラが起動しました | コントローラが起動します。 | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラーとツール | ||
1001 | 警告 | コントローラのシリアル番号が更新されました | IT ボードボックスのシリアル番号(コントローラのシリアル番号)が AUX ボードボックスのシリアル番号と異なる場合、起動時に生成されます。AUX ボードは、フィールド内で非交換可能とみなされます。シリアル番号が更新されると、コントローラは再起動します。 | IT ボードやボックスを交換してください。 | ログ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラーとツール |
1010 | 情報 | Tool Connected | ツールが接続されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラーとツール | |
1011 | 情報 | Tool Disconnected | ツールが切断されます。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラーとツール | |
1012 | 情報 | ツールがコントローラ接続を拒否しました | このイベントは、ツールがスキップゾーンに入っている場合に発生する可能性があります。 | 別のコントローラーがツールに接続されているかどうかを確認してください。 ツール設定が正しく設定されていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラーとツール |
2000 | 警告 | バッテリー低 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2001 | 警告 | バッテリーが空です | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2002 | 警告 | ツールバッテリー正常性低 | ツールのバッテリー正常性の問題が検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2004 | 警告 | ツールが希望するタイプではありません | ツールが、ツール最大トルクが異なるツールに交換されました。 | ツールの変更。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2006 | 警告 | ツールバックアップバッテリー正常性低 | ツールのバックアップバッテリーのパフォーマンスが低すぎます。 | バックアップバッテリーを交換してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2007 | 警告 | ツールバックアップバッテリーなし | ツールバックアップバッテリーがありません。 | バッテリの挿入 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2008 | 警告 | ツールバックアップバッテリーエラー | ツールのバックアップバッテリーエラーが検出されました。 | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2009 | 警告 | バックアップバッテリー電圧低 | コントローラのバックアップバッテリがほとんど空です | バッテリーを交換してください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2010 | エラー | ツールソフトウェアバージョンが一致していません | ツールおよびコントローラソフトウェアのバージョンに互換性がありません。 | サービスツール - ツールソフトウェアの更新。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2012 | 警告 | ツール通信障害 | ツールとコントローラ間の通信が中断されました。 | アンテナの配置を変えてください。 | Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2013 | 警告 | 不正なリング位置 | ツール方向スイッチの位置に障害があります。 | 頻繁に発生する場合は、ツールの整備を行ってください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2014 | 警告 | ツールがオーバーヒート | ツールがオーバーヒートしました。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2015 | エラー | ツール温度センサーエラー | SRB、TBP、およびIxBツールのみ。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2016 | 警告 | ツールパルスユニット過熱 | パルスユニット過熱ツールはロックされていませんが、パルスユニットの温度がしきい値を超えている間は、ツールが開始されるたびに警告が表示されます。 | ツールが冷却するのを待ってください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2019 | 警告 | ツールがモーターを起動できませんでした | ツールモーターの障害。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2020 | 警告 | ツールのモーター調節が必要 | ツールのモーター調節が必要です。 | モータ調整を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2021 | 警告 | モータ調節失敗 | モーター調節に失敗しました。 | モータ調節を完了するか、ツールの保守を行います。 | ログ | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2022 | 情報 | モータ調節完了 | モーター調節が完了しました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2023 | 警告 | ツールにオープンエンドの調整が必要 | ツールにオープンエンドの調整が必要です。 | オープンエンドの調整を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2024 | 警告 | オープンエンドの調整に失敗しました | オープンエンドの調整に失敗しました。 | オープンエンドの調整を複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2025 | 情報 | オープンエンドの調整に成功しました | オープンエンドの調整に成功しました。 | ログ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2026 | 警告 | オープンエンドの位置で失敗しました | オープンエンドの位置決めで失敗しました。 | もう一度ツールトリガを押し、位置決めが完了するのを待ちます。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2027 | 警告 | ツールの温度が高いため使用が制限されています | 温度制限値に達しました。過熱によるツールのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | ツールの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2030 | エラー | ツールメモリー障害:ツールの変更 | ツールメモリが破損しています。 | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2031 | エラー | ツールアクセサリーメモリが破損しています | ツールアクセサリーメモリが破損しています。 | ツールアクセサリーの整備を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2040 | エラー | システムチェック失敗 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | ||
2041 | エラー | トルクトランスデューサエラー | 校正エラー時またはツールが変換器エラーをレポートした場合に生成されます。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2042 | エラー | 角度トランスデューサーエラー | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2043 | エラー | ツール接地故障エラー | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2044 | 情報 | ツールサービス間隔が過ぎています | ツールの保守が必要であることを示します。設定した締め付けの回数を超えたときにトリガされます。 | ツールの整備を実施します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2045 | 警告 | ツール校正データが無効です | 校正データの検証に失敗した場合。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2046 | 情報 | ツール: 次の校正日が過ぎています | ツールの較正が必要であることを示します。校正アラームが設定で有効にされており、現在時刻が次の校正日を過ぎている際にトリガされます。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2048 | 情報 | QA デバイスでツール校正値が更新されました | ツールの校正は、QAデバイスによる校正が実行されたときに更新されています | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2050 | エラー | ツールパラメータファイルはサポートされていません | 必要なツールパラメーターがありません。 | ツールパラメータを更新します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2060 | 情報 | 予期しないトリガー動作 | アクセサリーが接続されている場合にツールの起動を行わないために使用されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | |
2071 | エラー | ツールメモリが破損しています | ツールの記述子が破損しています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2072 | 情報 | 不明なデバイスが接続されています | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール | ||
2073 | 警告 | ツールトリガの監督失敗 | HW チャンネル障害です。ツールトリガのハードウェアとソフトウェアが一致しません。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2074 | 警告 | ツールインジケーターボード故障 | ツールインジケーターボード故障です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2075 | 警告 | ツールファン電圧障害 | ツールファン電圧障害です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2076 | 警告 | ツールアクセサリーバス電圧障害 | ツールアクセサリーバス電圧障害です。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2077 | 警告 | ツールトリガセンサエラー | ツールトリガセンサエラーです。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2078 | 情報 | ツール締め付けプログラムが更新されました | 締め付けプログラム更新のために、ツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2079 | エラー | ツールケーブルがサポートされていません | ツールケーブルが破損しています。ケーブル内のチップは応答していないか、破損しています。 | ケーブルを交換してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | ツール |
2080 | エラー | ツールバッテリ障害 | DC 電圧が高すぎるか、低すぎます。バッテリー障害。 | アトラスコプコのサービス担当者に連絡し、アトラスコプコにバッテリを送り返します(再利用しないでください!)。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2081 | エラー | ツール電流制限に達しました | 電流制限値に達したため、ドライブが無効になっています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2082 | エラー | ツール電流測定エラー | 電流測定エラー電流の測定結果が信頼できません。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2083 | エラー | ツール内部エラー | さまざまな内部ハードウェアエラー。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2084 | エラー | ツール内部ソフトウェアエラー | さまざまな内部ソフトウェアエラー | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2085 | エラー | ツール RBU エラー | RBU エラーがツールソフトウェアによって検出されました。 | RBU が正しくインストールされているか確認してください。それでもエラーが発生する場合、ツールの保守を行ってください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2086 | エラー | ツール停止 | ツールモータが停止しています。 | ツールの保守を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2087 | 警告 | ツールモーター電流高 | ツールのモータの電流限度を超えており、ツールがロックされています。ツールはフェールセーフモードに入ります。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2088 | 警告 | ツールバッテリー電流高 | ツールバッテリー電流が高過ぎます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2089 | 警告 | ツールドライブ電圧低 | ツールのドライブ電圧が監視されている電圧下限値を下回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2090 | 警告 | ツールドライブ電圧高 | ツールのドライブ電圧が監視されている電圧上限値を上回っています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2091 | 警告 | ツールメインボードエラー | ツールメインボード内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2092 | 警告 | ツールパワーモジュールエラー | ツールパワーモジュール内部エラー。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール | |
2093 | 警告 | パルスユニットオイルレベル低 | 接続されたパルスツールのオイルレベルが低いです。 | ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2094 | 警告 | パルスユニットオイルレベル空 | 接続されたパルスツールのオイルレベルが必要な動作レベル以下です。 | ツールの保守を行います。 | ログ ディスプレイ ACK Conf | Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2095 | 警告 | ツールバッテリの通信が失われました | ツールがバッテリーとの通信を失いました。 | バッテリが正しく挿入されていることを確認します。または、バッテリを交換します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2096 | エラー | ツールバッテリーのソフトウェアバージョンが一致しません | ツールバッテリソフトウェアは、ツールソフトウェアと互換性がありません。 | ソフトウェアを更新てください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2100 | 情報 | STwrench smartHEAD が削除されました | STwrench smartHEAD が削除されました。 | smartHEADを再接続し、レンチを再起動します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | ツール |
2101 | 警告 | ロック時のレンチ締め | ツールのステータスがコントローラーによってロックされているときに、レンチによる締め付けが実行されました。 | コントローラのツールステータスがロック解除されるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 | ツール |
2120 | 警告 | 開始できません: ツールにアクティブなトルクトランスデューサがありません | ログ ディスプレイ | Flex | ツール | ||
2121 | 警告 | 接続されたツールではトランスデューサーが無効になっています | ログ ディスプレイ | Flex | ツール | ||
2122 | 警告 | 開始できません: ツールに必要なトルクトランスデューサがありません | ログ ディスプレイ | Flex IxB | ツール | ||
2123 | 警告 | 開始できません: ツールに必要な角度トランスデューサがありません | ログ ディスプレイ | Flex | ツール | ||
2124 | エラー | メイントランスデューサのトルクトランスデューサエラー | デュアルトランスデューサーを備えたツールのメイントルクトランスデューサーに、エラーがあることを示します。 | ログ ディスプレイ | Flex | ツール | |
2125 | エラー | 二次トランスデューサのトルクトランスデューサエラー | デュアルトランスデューサーを備えたツールの二次トルクトランスデューサーに、エラーがあることを示します。 | ログ ディスプレイ | Flex | ツール | |
2126 | エラー | メイントランスデューサでのツールトルクトランスデューサ校正エラー | ログ ディスプレイ | Flex | ツール | ||
2127 | エラー | ツールトルクトランスデューサ校正エラー | ログ ディスプレイ | Flex StepSync | ツール | ||
2128 | エラー | メイントルクトランスデューサ:メイントランスデューサでシャントテストに失敗しました | ログ ディスプレイ | Flex | ツール | ||
2129 | エラー | メイントルクトランスデューサ:シャントテストに失敗しました | ログ ディスプレイ | Flex StepSync | ツール | ||
2130 | エラー | メイントルクトランスデューサ:メイントランスデューサでゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex | ツール | ||
2131 | エラー | メイントルクトランスデューサ:ゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex StepSync | ツール | ||
2132 | エラー | メイントランスデューサでのツールトルクトランスデューサハードウェアエラー | ログ ディスプレイ | Flex | ツール | ||
2133 | エラー | ツールトルクトランスデューサハードウェアエラー | ログ ディスプレイ | Flex StepSync | ツール | ||
2134 | エラー | ツールトルクトランスデューサエラー: メイントランスデューサのA/Dコンバーターのオーバーフロー | ログ ディスプレイ | Flex | ツール | ||
2135 | エラー | ツールトルクトランスデューサエラー: A/D コンバーターのオーバーフロー | ログ ディスプレイ | Flex StepSync | ツール | ||
2136 | エラー | 二次トランスデューサでのツールトルクトランスデューサ校正エラー | ログ ディスプレイ | Flex | ツール | ||
2137 | エラー | ツールトルクトランスデューサエラー: 二次トランスデューサでシャントテストに失敗しました | ログ ディスプレイ | Flex | ツール | ||
2138 | エラー | ツールトルクトランスデューサエラー: 二次トランスデューサでゼロオフセット補正に失敗しました | ログ ディスプレイ | Flex | ツール | ||
2139 | エラー | 二次トランスデューサでのツールトルクトランスデューサハードウェアエラー | ログ ディスプレイ | Flex | ツール | ||
2140 | エラー | ツールトルクトランスデューサエラー: 二次トランスデューサのA/Dコンバーターのオーバーフロー | ログ ディスプレイ | Flex | ツール | ||
3000 | エラー | コントローラ内部ソフトウェアエラー | コントローラのソフトウェアエラー。 | サービスにご連絡ください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3001 | エラー | コントローラクロックバッテリ空 | 内部バッテリが寿命に近づいています。 | バッテリーを交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3010 | 警告 | システム過熱 | コントローラが過熱しています。 | クールダウンしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3011 | 警告 | コントローラハードウェア駆動部が過熱しています | クールダウンしてください。 | ログ ディスプレイ Conf | Flex | コントローラー、ドライブ、StepSync | |
3013 | 警告 | コントローラーの温度が高いため、使用が制限されています | 温度制限値に達しました。過熱によるコントローラーのシャットダウンのリスクを減らすために、締め付けは禁止されています。 | コントローラーの温度が下がるまでお待ちください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3020 | 警告 | コントローラハードウェア障害 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | ||
3021 | 警告 | システム電圧の問題 | DC 電圧が高すぎるか、低すぎます。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3022 | 警告 | コントローラーの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3023 | 警告 | コントローラーの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3024 | 警告 | ドライブの電圧の問題:AC入力電圧が高すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3025 | 警告 | ドライブの電圧の問題:AC入力電圧が低すぎます | DC 電圧が高すぎるか、低すぎます。 | 入力電圧を固定します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3030 | エラー | IP アドレスがネットワーク上の他のノードと競合しています | 設定された IP アドレスは、同じネットワーク上の別のデバイスによって使用されています。 | デバイスのうちの 1 つの IP アドレスを変更してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3031 | 情報 | ネットワークケーブルが抜けています。 | 工場用ポートのキャリアが失われました(ケーブルの接続が解除されました)。 | ケーブルの接続を確認してください。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3032 | 情報 | ペアリング開始 | ツールペアリングが開始しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3033 | 情報 | ペアリング成功 | ツールペアリングが成功しました。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3034 | エラー | ペアリングに失敗しました:ツールが見つかりません | コントローラは、無線ピアにスキャンする際にペアリングするツールを見つけられませんでした。 | ツールをペアリングモードに設定し、再試行してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3035 | エラー | ペアリングに失敗しました:複数のツールが見つかりました | コントローラは、無線ピアにスキャンする際に複数のツールを見つけました。 | コントローラでペアリングモードを開始する際には、1 つのツールのみがペアリングモードになっていることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3036 | エラー | ペアリングに失敗しました:通信エラー | コントローラがペアリングプロセス中に、接続の喪失、想定外の応答、またはタイムアウトになりました。 | ペアリングを複数回実施してみてください。再び失敗する場合は、ツールの保守を行います。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync |
3037 | 情報 | ペアリングに失敗しました:ツールスロットが一杯です | 1つのツールスロットをクリアしてください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | |
3040 | 警告 | 非常停止 | 緊急停止のためにドライブが無効になりました。 | 非常停止をリセットします。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3050 | 情報 | システムクロック更新 | システムクロックが更新されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3051 | エラー | システムクロックエラー | ハードウェアリアルタイムクロック(RTC)から読み出した時間が間違っています。 | RTC バッテリーを変更してください。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3052 | 警告 | リモート起動構成エラー | HW と SW リモート起動構成が一致していません。 | HW ディップスイッチが選択された開始ソースと一致していることを確認してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3053 | 情報 | ドライブが接続されました | StepSyncドライブが接続されました。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3054 | 情報 | ドライブが切断されました | StepSyncドライブが切断されました。 | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3055 | 警告 | モード構成エラー | 選択したモードが誤って構成されると生成されます。たとえば、同じボルト番号または同じチャンネルの2つのボルトの構成、不完全モード構成など。 | モード構成エラーについては、ToolsTalk 2 を確認してください。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3056 | 警告 | 開始できません: ツールまたはドライブがありません | 使用されているチャネルにドライブやツールがない場合に生成されます。 | HMIのチャンネルメニューを確認してください。喪失したドライブまたはツールを接続します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3057 | 情報 | 開始できません: チャンネルはすでに使用されています | 必要なチャンネルが別の仮想ステーションに割り当てられる場合に生成されます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3058 | 情報 | モードが選択されていません | モードを選択します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | |
3059 | 警告 | アトラスコプコのライセンスマネージャへの接続に失敗しました | コントローラが、ローカルのライセンスマネージャに接続してライセンスを取得するのに失敗したことを示します。 | ローカルネットワークを検証してください。再び失敗する場合は、コントローラの整備を行います。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3061 | 警告 | 開始できません: 信号低を有効にします | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3062 | 警告 | 開始できません: 信号高を停止します | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3063 | 警告 | 開始できません: すべてのチャンネルが禁止されました | すべてのチャンネルが禁止されているため、締め付けを開始することができません。 | 少なくとも1つのチャンネルを禁止しないように設定します。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3064 | 警告 | キャリア番号に問題があります | FlexCarrierの16進スイッチがゼロに設定されています。 | スイッチをゼロ以外の値に切り替えます。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3065 | 警告 | キャリアの非常停止設定プラグのタイプが間違っているか、見つかりません | キャリアに非常停止構成プラグがないか、プラグのタイプが間違っています。 | 正しいプラグタイプを挿入してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3066 | 警告 | キャリア電圧入口: 三相ACなし | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3067 | 警告 | キャリア電圧入口: 1つのAC相がありません | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3068 | 警告 | キャリア:内部24 VDC電源装置が故障しています | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3069 | 警告 | キャリア24電圧出力ポートが過電流により無効になっています | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3070 | 警告 | キャリア、PF6 FlexControlケーブル出力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3071 | 警告 | キャリア、PF6 FlexControlケーブル入力でハードウェアエラー | システムをリセットします。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | |
3072 | 警告 | 短絡による緊急停止 24 VDC 電源障害 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3073 | 警告 | 開始できません: システムが非常停止しました | 複数のスピンドルを割り当てる場合、このイベントは非常停止のために 「preStartCheckFailed」 によって呼び出されます。 | 非常停止をリセットします。 | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync |
3074 | 警告 | キャリア過熱 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3075 | 警告 | キャリア温度 OK | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3076 | 警告 | キャリア:内部24 VDC電源が過負荷です | 内部PSUからの電流出力が高すぎます。 | PSUから電力供給を受けている他のキャリアを切断します。24 VDCを使用して外部機器をすべて取り外します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3077 | 警告 | キャリア:内部24 VDC電源電圧値超過 | 内部PSUからの電圧出力が高すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3078 | 警告 | キャリア:内部24 VDC電源電圧値過小 | 内蔵PSUからの電圧出力が低すぎます。 | キャリアを交換してください。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3079 | 警告 | キャリアへの外部供給:24VDC過電圧 | バックアップ入力電圧が27VDCを超えています。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3080 | 警告 | キャリアへの外部供給:24VDC不足電圧 | バックアップ入力電圧が19VDC未満です。 | バックアップ入力電圧を調整します。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3081 | 警告 | キャリア電圧入口: 三相AC過電圧 | 入力電圧が高すぎます。 | 入力電圧を下げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3082 | 警告 | キャリア電圧入口: 三相AC不足電圧 | 入力電圧が低すぎます。 | 入力電圧を上げます。400VACまたは480VACである必要があります。 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync |
3083 | エラー | Anybus/Profisafe モジュールファームウェアの間違い | ログ ディスプレイ | Flex Power Focus 6000 Power Focus 8 StepSync | コントローラー、ドライブ、StepSync | ||
3084 | エラー | ソフト PLC ランタイムエラー | eCLR が制御不能な方法で終了しました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync | コントローラー、ドライブ、StepSync | |
3085 | 警告 | キャリア:ファンモジュールが故障しています | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3086 | 警告 | キャリア:ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3087 | 警告 | キャリア:左ファンモジュールの故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3088 | 警告 | キャリア:左ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3089 | 警告 | キャリア:右ファンモジュールの故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3090 | 警告 | キャリア:右ファンモジュールの部分故障 | ログ ディスプレイ | Flex | コントローラー、ドライブ、StepSync | ||
3100 | 警告 | モード構成が存在しません | ログ ディスプレイ | Flex StepSync | コントローラー、ドライブ、StepSync | ||
3150 | エラー | ソフトウェアIAMの非互換性 | IAMはコントローラにインストールされたソフトウェアと互換性がありません | IAM を交換してください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3160 | エラー | 新しくインストールされたソフトウェアのライセンス認証に失敗しました | ライセンス認証中に問題が発生しました。新しくインストールされたソフトウェアが起動すると、以前に動作していたソフトウェアへのフォールバックが発生する。このエラーは、ソフトウェアのインストール中にのみ起こり、新しいソフトウェアが 3 回起動できなかった場合に発生します。 | エクスポートして、アトラスコプコまでご連絡ください。インストールしようとしているソフトウェアのバージョンと、機能しているソフトウェアのバージョンを書き留めてください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3161 | エラー | 予期しないソフトウェアパーティションで開始されました。 | コントローラは、予期されたソフトウェア側ではなく、非アクティブなソフトウェア側で起動しました。 | ソフトウェア情報を書き留めます(コントローラーのホーム画面で、[コントローラ] > [ソフトウェア]を選択します)。コントローラを再起動して、再起動時に正しいソフトウェアで実行されていることを確認してください。エラーが続く場合は、エクスポートしてアトラスコプコまでお問い合わせください。 | ログ ディスプレイ ACK | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3500 | エラー | 一般ライセンスマネージャエラー | 使用されている機能管理システムで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3501 | エラー | ライセンスマネージャ同期エラー | ログ ディスプレイ ACK | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | ||
3502 | 情報 | ライセンスマネージャ同期完了 | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |||
3503 | 警告 | ライセンスマネージャー:別のソースが使用中 | ライセンスは別のソースによって使用されています。 | ライセンスの割り当てを確認してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3504 | 警告 | ライセンスマネージャーの再起動が必要です | ライセンスマネージャーを再起動してください。 | ログ ディスプレイ | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3505 | 情報 | USB ライセンスの同期が開始しました | ログ | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | ||
3506 | エラー | USB ライセンスの同期エラー | ログ | Power Focus 6000 Power Focus 8 Power Focus XC | コントローラー、ドライブ、StepSync | ||
3507 | 情報 | USB ライセンスの同期が終了しました | ログ | Power Focus 6000 Power Focus 8 | コントローラー、ドライブ、StepSync | ||
3508 | 情報 | 1つまたは複数のライセンスの有効期限が近づいています。ライセンスサーバーが構成されていることを確認してください | ライセンスを更新します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3511 | 警告 | ライセンスの1つに異なるライセンス定義があります | 使用するライセンスで不整合が検出されました。 | アトラスコプコの代理店までご連絡ください。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync |
3550 | 警告 | ライセンスがありません | 正しいライセンスをインストールしてください | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
3551 | 警告 | ライセンスにより無線通信が無効になっています | 仮想ステーションからスタンドアロンライセンスの割り当てを解除します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | コントローラー、ドライブ、StepSync | |
4010 | 情報 | ツールがデジタル入力によりロックされました。 | ツールは、デジタル入力信号によってロックされました。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4011 | 情報 | Open Protocolによるツールのロック | ツールはOpen Protocolによってロックされています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4012 | 情報 | フィールドバスによってロックされたツール | ツールは、フィールドバスによってロックされました。 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4013 | 情報 | ソケットセレクタによってロックされているツール | ソケットセレクタが仮想ステーションから切断されると、ツールがロックされます。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4014 | 情報 | ツールがソフト PLC によってロックされています | ソフト PLC 信号によってツールがロックされています。 | マスターアンロックでロック解除 | ログ ディスプレイ Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4015 | 情報 | 緩め無効 | 締め付けプログラムで緩めが無効になっています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4016 | 情報 | 締め付け無効 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4017 | 情報 | 緩めが構成されていません | 選択された締め付けプログラムで緩めが構成されていません | 異なる締め付けプログラムを選択してください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4020 | 情報 | NG締め付けけが多すぎます | バッチ内の連続NG締め付けの最大値を超えています。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4025 | 情報 | 締め付けプログラムが選択されていません | 締め付けプログラムが選択されていません。 | 締め付けプログラムまたはバッチシーケンスを選択します。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4030 | 情報 | バッチシーケンスが中止されました | バッチシーケンスが中止されました。 | ログ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | |
4031 | 情報 | バッチシーケンスを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4032 | 情報 | 最初の締め付けを完了する最長時間に達しました | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4035 | 情報 | ライン制御によりロック | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4040 | 情報 | 代替識別子によりロックされました | 代替識別子によりツールがロックされました。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4050 | 無効なソケット構成 | 複数のソケットに締め付けプログラムが割り当てられています。 | 複数のソケットに締め付けプログラムが割り当てられています。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4060 | 情報 | ツールがバッチ完了でロックされました | バッチシーケンス完了でフラグツールロックを使用してバッチを実行すると、ユーザーがトリガを押した際にこのイベントが生成されます。 | 完了で信号のロック解除ツールを使用してロックを解除します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 |
4070 | 情報 | プロセスが手動モードに入りました | 仮想ステーションで手動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4071 | 情報 | プロセスが自動モードに入りました | 仮想ステーションで自動モードが起動していることを示します。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4072 | 情報 | テストボルト | Conf | Flex StepSync | 締め付け工程 | ||
4100 | 警告 | 識別子は受け入れられません:文字列の長さが無効です | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4101 | 警告 | 文字列の選択に失敗しました:複数の一致 | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4102 | 警告 | 文字列の選択に失敗しました:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4103 | 警告 | 識別子は受け入れられません:同じ文字列がすでに受信されています | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4104 | 警告 | 識別子は受け入れられません:一致するものが見つかりませんでした | ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | 締め付け工程 | ||
4500 | 情報 | 結果ドライブエラー | 内部ドライブエラーまたはドライバ喪失が検出されました。 | Conf | Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4501 | 情報 | 結果リヒット | リヒット検出がオンのときにすでに締め付けたボルトを締め付ける試み。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4502 | 情報 | 結果ソフトスタートトルク低 | 最小レベル未満のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4503 | 情報 | 結果ソフトスタートトルク高 | 最大レベル超過のソフトスタートトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4504 | 情報 | 結果セルフタップトルク高 | セルフタップトルク最大レベルを超過しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4505 | 情報 | 結果セルフタップトルク低 | 最小限度未満のセルフタップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4506 | 情報 | 結果安全トルク低 | トルクセンサーを正しく取り付けるための自動的に計算したトルク値。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4507 | 情報 | 結果ランダウントルク高 | 最大レベル超過のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4508 | 情報 | 結果ランダウン角度高 | 最大レベル超過のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4509 | 情報 | 結果ランダウン時間高 | 最大制限超過のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4510 | 情報 | 結果ランダウン時間低 | 最小制限未満のランダウン時間。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4511 | 情報 | 結果ランダウントルク低 | 最小レベル未満のランダウントルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4512 | 情報 | 結果ランダウン角度低 | 最小レベル未満のランダウン角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4513 | 情報 | 結果最終トルク高 | 最大レベル超過の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4514 | 情報 | 結果最終角度高 | 最大レベル超過の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4515 | 情報 | 結果最終トルク低 | 最小レベル未満の最終ステップトルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4516 | 情報 | 結果最終角度低 | 最小レベル未満の最終ステップ角度。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4517 | 情報 | 結果締め付けタイムアウト | 締め付け時間制限が超過しました。一般的な締め付け戦略での、最大締め付け時間は30秒です。マルチステップの最大締め付け時間は、ステップ制限の最大時間によって異なります。エラーコードは締め付け段階によって異なります。 | 締め付けの再実行。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 |
4518 | 情報 | 結果トリガ喪失 | ターゲットに達する前にツールトリガーがリリースされました。 一般的な締め付け戦略で、締め付け段階が終了する前にトリガを解除することは許可されていません。 マルチステップでは、特定のステップの目標に達する前にトリガが解除されると、エラーが表示されます。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4519 | 情報 | 早期のトルク喪失 | ソケットがナットから脱落しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4520 | 情報 | 結果最終ステップ前にターゲットに到達 | 締め付けプログラムの最終ステップの前にターゲットトルクに達しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4521 | 情報 | 結果ポストビュートルク低 | 最小レベル未満のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4522 | 情報 | 結果ポストビュートルク高 | 最大レベル超過のポストビュートルク。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4523 | 情報 | 結果ポストビュートルク間隔に達していません | ポストビュートルク間隔に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4524 | 情報 | 結果トルク補正間隔に達していません | ランダウン終了前にトルク補正間隔角度に達していません。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4525 | 情報 | ツールの動き超過の結果です | NOK 締め付け詳細状態から。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4526 | 情報 | 結果 SafetyCurrMon センサ不一致 | 電流監視エラー。 | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4527 | 情報 | ツールの動き超過の結果です | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |||
4538 | 情報 | 結果最終監督トルク低 | 最終監督トルクに達しませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4543 | 情報 | 結果スナッグモニター高 | レンチ専用。モニターが着座レベルを超えていることを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4545 | 情報 | 結果残留トルクなし | レンチ専用。残留トルクがしきい値未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4546 | 情報 | 結果過速度 | レンチ専用。レンチジャイロが、速度が速いために角度を測定できませんでした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4547 | 情報 | 結果有効な緩め | レンチ専用。レンチが予期しない緩めを検出しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4548 | 情報 | 結果最終が目標未満 | 最終トルクが、締め付けプログラムで設定されたターゲットトルク未満です。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4549 | 情報 | TurboTight 時間制限超過 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4550 | 情報 | 結果ランダウンパルス高 | ランダウンパルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4551 | 情報 | 結果ランダウンパルス低 | ランダウンパルスの最小数に達する前にランダウンが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4552 | 情報 | 結果最終パルス高 | パルスの最大数を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4553 | 情報 | 結果最終パルス低 | パルスの最小数に達する前に締め付けが完了しました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4554 | 情報 | シャットオフ高時の電流 | シャットオフ時の電流が電流上限を超えました。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4555 | 情報 | シャットオフ低時の電流 | 測定されたシャットオフ電流が電流下限未満でした。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4556 | 情報 | 未分類のマルチステップエラー | マルチステップ構成のエラー。多くの場合はツール検証に関するエラーです。 | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | |
4557 | 情報 | 結果は過負荷です | Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | 締め付け工程 | ||
4600 | 警告 | バッチ締め付けと組み合わせて使用されたデータドロップまたはデータ保持。信号には効果がありません。 | データドロップとデータ保持は、バッチ制御なしのワークタスクでのみサポートされます。信号を使用する必要がある場合は、別のワークタスクを選択してください。 | Flex StepSync | 締め付け工程 | ||
4601 | 情報 | データ保持が有効:信号が低になると、締め付け結果が送信されます。 | Flex StepSync | 締め付け工程 | |||
4602 | 情報 | データドロップが有効:締め付け結果が破棄されます | Flex StepSync | 締め付け工程 | |||
5010 | 警告 | 無効な締め付けプログラムパラメーター値 | 選択した締め付けプログラムのパラメーターが無効です。 | パラメーターの値を見つけて変更するには、選択した締め付けプログラムの構成をチェックしてください。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | プログラム構成 |
5020 | 情報 | メイントリガは有効な開始ソースではありません | プッシュスタートのみ構成され、ユーザーがメイントリガを押した場合のみ生成されます。ユーザーがプッシュスタートを押すまでに生成されます。 | プッシュスタートを押してツールを開始します。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | プログラム構成 |
5030 | 情報 | 締め付けプログラムの複雑度がツールの容量を超えています | 選択された締め付けプログラムが、使用している STB ツールに複雑すぎます。ツールはロックされます。 | 締め付けプログラムの複雑性を低下させるか、別のプログラムを選択してください。 | ログ ディスプレイ Conf | Power Focus 6000 Power Focus 8 Power Focus XC | プログラム構成 |
6010 | 情報 | 接続アクセサリー | アクセサリーがコントローラに接続されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー | |
6020 | 情報 | 未接続アクセサリー | アクセサリーがコントローラから切断されました。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー | |
6021 | 警告 | フィールドバスオフライン | フィールドバスとの通信がありません。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー | |
6030 | 警告 | アクセサリアドレスが競合しています | 同一アドレスのアクセサリーが複数接続されています。 | アクセサリーのアドレスを変更します。 | ログ ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー |
6040 | 警告 | アクセサリー通信エラー | アクセサリーの断続的通信エラーが発生しました。 | ケーブルとコネクタを確認します。 | ログ ディスプレイ Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー |
6041 | 警告 | フィールドバスエラー | フィールドバスとの通信エラー。 |
| ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリー |
6042 | 警告 | フィールドバスモジュールの不一致 | インストールされたフィールドバスモジュールが構成されたモジュールと一致しません。 | インストールされているモジュールと一致するように構成を変更するか、インストールされているモジュールを正しいものと交換してください。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリー |
6043 | 警告 | フィールドバス出力バッファオーバーフロー | フィールドバス通信に使用されている出力バッファが使い果たされ、バッファのオーバーフローが発生しました。1つ以上の信号更新が破棄されました。 | フィールドバス通信とフィールドバス診断(使用されている場合)を停止して、バッファを回復します。 このイベントが頻繁に発生する場合は、PLCプログラムを含むフィールドバス通信の設定を確認してください。更新間隔と比較して更新が多すぎると、このシナリオが発生する可能性があります。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync | アクセサリー |
6044 | 警告 | フィールドバス プロバイダーIDの不一致 | インストールされているフィールドバスモジュールはサポートされていません。 | サポートされているAtlas Copcoフィールドバスモジュールを接続します。 | ログ ディスプレイ ACK | Power Focus 8 | アクセサリー |
6050 | 情報 | 間違ったソケットが選択されました | ソケットが選択されていないか、間違ったソケットが選択された場合に生成されます。 | ログ ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | アクセサリー | |
6090 | 警告 | バーコードスキャナが特定できませんでした | 固有のシリアル番号が見つからない場合。 | バーコードリーダーのデバイスを構成します。 | ログ ディスプレイ ACK Conf | Flex Power Focus 6000 Power Focus 8 StepSync Power Focus XC | アクセサリー |
7010 | 情報 | 表示するメッセージのテキスト | メッセージを表示する一般的イベントです。 | ディスプレイ ACK Conf | Flex IxB Power Focus 6000 Power Focus 8 StepSync Power Focus XC | メッセージ | |
8200 | 情報 | シリアルポートを開くことができませんでした | 使用するシリアルポートを開くことができませんでした。 | シリアルポートの接続を確認してください。 | ディスプレイ Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | その他 |
8214 | エラー | EHMI ソフトウェアバージョンが一致していません | EHMIソフトウェアのバージョンがコントローラーとの互換性において一致しません。 | EHMIのソフトウェアバージョンを更新してください。 | ログ ディスプレイ ACK Conf | IxB Power Focus 6000 Power Focus 8 Power Focus XC | その他 |
Conf - イベントコードのリスト
次に利用可能 - イベントコードのリスト
イベントコードが利用可能な製品のリスト。
グループ - イベントコードのリスト
イベントコードが属するグループ。
イベントの説明
イベントの簡単な説明と、それが起こった理由。
手順 - イベントコードのリスト
該当する場合、手順には、イベントを消去する方法についての指示が含まれます。
ログ - イベントコードのリスト
イベントがイベントログに保存されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
ディスプレイ - イベントコードのリスト
イベントが画面で表示されるかどうかをユーザーに通知します。このリストの値はデフォルト値です。
Ack - イベントコードのリスト
続行する前にイベントを確認しなければならないかどうかをユーザーに通知します。このリストの値はデフォルト値です。
イベントコード
一意のイベント番号。
イベントの種類 - イベントコードリスト
イベントの種類:情報、警告、およびエラー。
イベント名
イベントの簡単な名前
NOK 結果一リスト
エラーメッセージ | 説明 | GUI の場所 |
|---|---|---|
ドライブエラー | 内部ドライブエラーまたはドライバ喪失が検出されました。 | 該当せず |
リヒット | 締め付け済みボルトの締め付けの試み。 | 締め付けパラメーター(編集) > リヒット検出 |
最大以上のソフトスタートトルク | 最大レベル超過のソフトスタートトルク。 | 締め付けパラメーター(編集) > (ステップ 1)ソフトスタート > 最大トルク |
最大以上のSelftapトルク | 最大レベル超過の Selftap トルク。 | 締め付けパラメーター(編集) > (ステップ 2)ソフトスタート > 最大トルク |
最小未満のSelftapトルク | 最小限度未満の Selftap トルク。 | 締め付けパラメーター(編集) > (ステップ 2)ソフトスタート > 最小トルク |
安全トルク限界低 | トルクセンサーを正しく取り付けるための自動的に計算したトルク値。 | 該当せず |
最大以上のランダウントルク | 最大レベル超過のランダウントルク。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウントルク制限 > 最大トルク |
最大以上のランダウン角度 | 最大レベル超過のランダウン角度。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウン角度制限 > 最大角度 |
ランダウンが最大時間制限超過 | 最大制限超過のランダウン時間。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウン角度制限 > 最大時間 |
ランダウンが最小時間制限未満 | 最小制限未満のランダウン時間。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウン角度制限 > 最小時間 |
ランダウントルクが最小未満 | 最小レベル未満のランダウントルク。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウントルク制限 > 最小トルク |
ランダウン角度が最小未満 | 最小レベル未満のランダウン角度。 | 締め付けパラメーター(編集) > (ステップ 2)ランダウン角度制限 > 最小角度 |
最終段階トルクが最大以上 | 最大レベル超過の最終ステップトルク。 | 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > トルク制限手動 > 最大トルク |
最終段階角度が最大以上 | 最大レベル超過の最終ステップ角度。 | 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > 最大角度 |
最終段階トルクが最小未満 | 最小レベル未満の最終ステップトルク。 | 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > トルク制限手動 > 最小トルク |
最終段階角度が最小未満 | 最小レベル未満の最終ステップ角度。 | 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > 最大角度 |
締め付けタイムアウト | 締め付け時間制限が超過しました。 | [マルチステップ] 締め付けパラメーター(編集) > ステップに依存 [その他の締め付けプログラム]:30 秒に設定されている固定パラメーター |
トリガ喪失 | ターゲットに達する前にツールトリガーがリリースされました。 | [マルチステップ]:締め付けステップの目標に達する前のトリガ解除 [その他の締め付けプログラム]:締め付け段階が終了する前のトリガ解除 |
スリップオフ | ソケットがナットから脱落しました。 | 締め付けパラメーター(編集) > (ステップ 3)締め付けパラメーター > スリップオフ検出時間 |
最終ステップの前にターゲットに到達しました | 締め付けプログラムの最終ステップの前にターゲットトルクに達しました。 | 目標トルク |
ポストビュートルクが最小未満 | 最小レベル未満のポストビュートルク。 | 締め付けパラメーター(編集) > (ステップ 2)ポストビュートルク > 最小トルク |
ポストビュートルクが最大以上 | 最大レベル超過のポストビュートルク。 | 締め付けパラメーター(編集) > (ステップ 2)ポストビュートルク > 最大トルク |
ポスト ビュー トルク間隔に達しています | ポストビュートルク間隔に達していません。 | 締め付けパラメーター(編集) > (ステップ 2)ポストビュートルク > 最小トルク長さ |
トルク補正間隔に達していません | ランダウン終了前にトルク補正間隔角度に達していません。 | 締め付けパラメーター(編集) > (ステップ 3)トルク補正 > トルク補正点 |
ツールの動きが超過しました | ツールが、設定角度制限を超えて移動しました。 | 締め付けパラメーター(編集) > (ステップ 1)TrueAngle 補正(オン);ツール移動制限 > 正/負 |
電流モニタリングエラー | 電流監視エラー。 | 締め付けパラメーター(編集) > (ステップ 1)電流監視(オン) |
最終段階が最大時間制限超過 | [TurboTight] 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > 最大時間 | |
最終段階が最小時間制限未満 | [TurboTight] 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > 最小時間 | |
TurboTight 時間制限超過 | TurboTight 時間制限を超過しました。 | [TurboTight] 締め付けパラメーター(編集) > (ステップ 3)最終ステップ > 最大時間 |
スナッグモニター高 | レンチ専用。モニターが着座レベルを超えていることを検出しました。 | 締め付けパラメーター(編集) > ランダウン段階(ステップ 2)ランダウン完了 > ランダウン完了トルク |
残留トルクなし | レンチ専用。残留トルクがしきい値未満です。 | [TurboTight] + [TensorPulse] 締め付けパラメーター(編集) > (ステップ 3) > 締め付けパラメーター > 残留トルクの相関係数 |
過速度 | レンチ専用。レンチジャイロが、速度が速いために角度を測定できませんでした。 | 該当せず |
NOK比率
This section shows the ten highest NOK tightening programs.

Click Reset All to delete the stored data.
SPC - 統計的プロセス制御
内蔵SPC機能の目的は、オペレーターまたは品質管理スタッフに、標準のSPCルールに従って組立工程の安定性と能力を判断できるデータを提供することです。
コントローラー内でSPC機能を設定することにより、外部ソフトウェアを必要とせずに、コントローラー上で直接作業を簡素化して実行することができます。チャートはコントローラーで生成されます。
コントローラー内のプログラムモニターはSPC変数として使用できるため、コントローラーによって制御される変数のみがコントローラシステムの性能を示すように指定する必要があります。その他の変数は、主に他のプロセスの結果を示します。たとえば、トルク値がジョイントに適用される場合、最終トルク値のSPCと関連する結果(CpやCpkなど)は、そのジョイントでのツールとコントローラーのパフォーマンスを示します。
統計計算は、コントローラーに保存されている古いデータに基づきます。
統計計算は、特定の仮想ステーションに対して選択および使用された締め付けプログラムに応じて、仮想ステーションレベルで実行されます。
SPCパラメーターの構成
ホームビューで、[レポート]タブを選択します。次に、左側で[統計]を選択します。
[SPC構成]ウィンドウで、次のパラメーターを入力して、コントローラーに保存されている結果を収集します:
サブグループ数: 統計計算の基となるサブグループの数を入力します。
結果の数(サブグループの数×頻度)は、2から500の範囲になります。サブグループサイズ: SPCチャートの各ポイント(サブグループ内のテストの平均値)を定義するために必要なテスト(サンプル)の数を入力します。
サブグループサイズの範囲は2〜25です。頻度: 新しいサブグループの収集を開始する頻度を入力します。
頻度は、サブグループサイズ以上である必要があります。たとえば、頻度が8でサブグループサイズが5の場合、最初の5つのデータ(結果)がサブグループに使用されます。頻度 = 8であるため、次のサブグループは8番目以降のデータ(結果)の検討を開始し、以下同様にループします。
SPC変数の構成
ホームビューで、[レポート]タブを選択します。次に、左側で[統計]を選択します。
GUIの右上隅にあるプラスアイコンを選択します。
SPC変数ウィンドウに新しい変数が表示されます。[名前]ボックスに、変数の名前を入力します。
変数の名前は、 SPC変数ウィンドウの見出しとなります。締め付けプログラムを選択します。
[締め付けプログラム]ウィンドウが表示され、コントローラーに保存され、統計計算に使用できるすべてのマルチステップ締め付けプログラムが一覧表示されます。
新しい変数のマルチステップ締め付けプログラムを選択します。締め付けプログラムはマルチステッププログラムである必要があります。
仮想ステーションを選択します。
[仮想ステーション]ウィンドウが表示されます。
結果を作成する元となる仮想ステーションを選択します。統計は、次のライセンスタイプが割り当てられた仮想ステーションによって作成された結果に基づいています。
プロセス制御
[モニター]を選択します。
[モニター]ウィンドウが表示されます。
SPC 計算の基になる次のプログラムモニターで、いずれかのプログラムを選択します:ステップモニターピークトルク
ステップモニター角度
最終トルク
最終角度
プログラムモニタートルク
プログラム監視角度
ユーザーがステップモニターのピークトルクまたはステップモニターの角度を選択した場合は、[ステップ番号]ボックスに、値を読み取る締め付けプログラムの必要なステップ番号を入力します。
ユーザーが結果レポーターを使用する場合、次のモニター値に影響を与える可能性があります。最終トルクおよび最終角度。
[制限の編集]を選択します。
[変数の構成]ウィンドウが表示されます。
結果の計算と分析では、対象となる値ごとに次の制限を設定します。
[許容誤差限界値]ウィンドウで、以下の制限を設定します (プロセス機能の計算に使用するCpおよびCpk)。
許容誤差の上限(UTL):製品属性の最大許容値を識別するユーザー定義数量。
許容誤差の下限(LTL):製品属性の最小許容値を識別するユーザー定義数量。
[管理限界]ウィンドウで、自動計算スイッチを有効または無効にします。
自動計算スイッチが[はい]に設定されている場合、管理限界は自動的に計算されます。
自動計算スイッチが[いいえ]に設定されている場合は、次の制限を設定します:
平均-上側管理限界:プロセス平均の上に水平破線として表示される統計的に決定された測定値。
平均-下側管理限界:プロセス平均の下に水平破線として表示される統計的に決定された値。
範囲-上側管理限界:プロセス平均の上に水平破線として表示される統計的に決定された測定値。
範囲-下側管理限界:プロセス平均の下に水平破線として表示される統計的に決定された値。
シグマ-上側管理限界:プロセス平均の上に水平破線として表示される統計的に決定された測定値。
シグマ-下側管理限界:プロセス平均の下に水平破線として表示される統計的に決定された値。
[機能]ウィンドウで、次の制限を設定します。
Cp :Cp指数は、工程能力を示します。これは、プロセスの広がりが許容幅内に入る回数です(許容誤差の上限-許容誤差の下限)。Cpの値が高いほど、プロセスは良好です。
Cpk: Cpk指数は、位置に対して補正された工程能力を示します。プロセス設定が許容誤差の中央を基準にして中央から大きく外れている場合、高いCp指数を持つことは有用ではありません。したがって、Cpk指数が高いということは、許容幅に対して小さな広がりで良好なプロセスがあり、その幅内で中央位置に良好に配置されていることを意味します(許容誤差の上限-許容誤差の下限)。CpkがCpと等しい場合、プロセスは許容範囲のちょうど中央で生成されるように設定されています。
関連情報
統計情報の計算
ホームビューで、[レポート]タブを選択します。次に、左側で[統計]を選択します。
[SPC構成]ウィンドウで、コントローラーに保存された結果を収集するためのパラメーター(サブグループの数、サブグループのサイズ、および頻度)を入力します。
GUIの右上隅にあるプラスアイコンを選択します。
SPC変数ウィンドウに新しい変数が表示されます。
新しいSPC変数を構成します。[SPC変数]ウィンドウで、[計算]を選択します。
データは、コントローラーに格納されている履歴結果から収集され、[SPC構成]ウィンドウおよび[SPC変数] ウィンドウで設定された基準に合わせて配置されます。対象の値は、[SPC構成]ウィンドウで設定されたサイズのサブグループに収集されます。コントローラーで収集された締め付け結果は、統計計算に使用されます。
削除された締め付けプログラムまたは仮想ステーションからの結果の統計を計算することはできません。ただし、結果がコントローラーに格納されている場合を除きます。
統計を計算できるのは、一度に1人のユーザーのみです。
統計の式
サブグループ内のデータは、次のように計算されます:
平均:
範囲= R = max(X i )-min(X i )、ここで i = 1 ... n
サブグループの標準偏差:
標準偏差の全体の合計:
ここで、N = 観測値の総数。
計算に使用するサブグループの指定数が収集されると、SPC関数は計算を開始し、統計の安定性を判断します。
計算は、次の手順で実行されます:(m = サブグループの数)
平均値の平均の計算:
範囲の平均の計算:
標準偏差の平均の計算:
シグマに関するプロセス能力CpおよびCpkの計算:
ここで、
 は、観測された特性値の全体的な算術平均です。
は、観測された特性値の全体的な算術平均です。UTLは許容誤差の上限です。
LTLは許容誤差の下限です。
シグマ推定は、サブグループ内の平均平方標準偏差です。
範囲に関するプロセス能力CpおよびCpkの計算:
正規分布の場合、 su = sl = 3です。
[SPC構成]ウィンドウで[自動計算]スイッチが[はい]に設定されている場合の管理限界の計算:
X-bar R(平均)

X-bar R(範囲)
X-bar S(平均)
X-bar S(シグマ)
A2、A3、D3、D 4、B3、およびB4は定数です(詳細については、「SPC計算定数」の段落を参照してください)。
SPC計算定数
サブグループサイズ | 標準偏差推定のための除数 | 管理限界係数 | |||||
|---|---|---|---|---|---|---|---|
Xbar R | Xbar S | ||||||
A2 | D3 | D4 | A3 | B3 | B4 | ||
n | d2 | ||||||
2 | 1.128 | 1.880 | - | 3.267 | 2.659 | - | 3.267 |
3 | 1.693 | 1.023 | - | 2.574 | 1.954 | - | 2.568 |
4 | 2.059 | 0.729 | - | 2.282 | 1.628 | - | 2.266 |
5 | 2.326 | 0.577 | - | 2.114 | 1.427 | - | 2.089 |
6 | 2.534 | 0.483 | - | 2.004 | 1.287 | 0.030 | 1.970 |
7 | 2.704 | 0.419 | 0.076 | 1.924 | 1.182 | 0.118 | 1.882 |
8 | 2.847 | 0.373 | 0.136 | 1.864 | 1.099 | 0.185 | 1.815 |
9 | 2.970 | 0.337 | 0.184 | 1.816 | 1.032 | 0.239 | 1.761 |
10 | 3.078 | 0.308 | 0.223 | 1.777 | 0.975 | 0.284 | 1.716 |
11 | 3.173 | 0.285 | 0.256 | 1.744 | 0.927 | 0.321 | 1.679 |
12 | 3.258 | 0.266 | 0.283 | 1.717 | 0.886 | 0.354 | 1.646 |
13 | 3.336 | 0.249 | 0.307 | 1.693 | 0.850 | 0.382 | 1.618 |
14 | 3.407 | 0.235 | 0.328 | 1.672 | 0.817 | 0.406 | 1.594 |
15 | 3.472 | 0.223 | 0.347 | 1.653 | 0.789 | 0.428 | 1.572 |
16 | 3.532 | 0.212 | 0.363 | 1.637 | 0.763 | 0.448 | 1.552 |
17 | 3.588 | 0.203 | 0.378 | 1.622 | 0.739 | 0.466 | 1.534 |
18 | 3.640 | 0.194 | 0.391 | 1.608 | 0.718 | 0.482 | 1.518 |
19 | 3.689 | 0.187 | 0.403 | 1.597 | 0.698 | 0.497 | 1.503 |
20 | 3.735 | 0.180 | 0.415 | 1.585 | 0.680 | 0.510 | 1.490 |
21 | 3.778 | 0.173 | 0.425 | 1.575 | 0.663 | 0.523 | 1.477 |
22 | 3.819 | 0.167 | 0.434 | 1.566 | 0.647 | 0.534 | 1.466 |
23 | 3.858 | 0.162 | 0.443 | 1.557 | 0.633 | 0.545 | 1.455 |
24 | 3.895 | 0.157 | 0.451 | 1.548 | 0.619 | 0.555 | 1.445 |
25 | 3.931 | 0.153 | 0.459 | 1.541 | 0.606 | 0.565 | 1.435 |
統計結果の表示
ホームビューで、[レポート]タブを選択します。次に、左側で[統計]を選択します。
[SPC構成]ウィンドウで、次のパラメーターを入力します:サブグループの数、サブグループサイズ、および頻度。
GUIの右上隅にあるプラスアイコンを選択します。
SPC変数ウィンドウに新しい変数が表示されます。
新しいSPC変数を構成します。[SPC変数]ウィンドウで、[計算]を選択します。
統計結果を表示するには、[SPC変数]ウィンドウで[表示]ボックスを選択します。
[表示]ボックスには、統計結果が実行された日付と時刻が表示されます。
統計結果は、ヒストグラム、XBar-Rグラフ、および XBar-Sグラフを使用して表示されます。フィルタ処理された結果に対するすべての計算が完了すると、Web HMI と ToolsTalk 2に送信されます。
統計情報の結果は、ローカルでインターネット一時ファイル フォルダに保存されます (コントローラーには保存されません)。統計結果は、Web HMIでのみ表示できます。
ヒストグラム
ヒストグラムは一連の長方形であり、それぞれの幅はクラス内の値の範囲に比例し、高さはクラスに含まれるサンプルの数に比例します。ガウス曲線は、長方形の傾向に従います。ヒストグラムは、プロセスがその中に持つ変数の数を明らかにします。
ヒストグラムは、表では容易に識別できない傾向を強調し、明確にするため、便利です。
XBar-Rグラフ
XBar-R管理図には、サブグループの平均値(XBar)と範囲(R)の両方が表示されます。これは、離散値または連続値を使用する最も一般的なタイプの管理図です。グラフのXBar部分はプロセスの平均値の変化を示し、R部分はプロセスの分散の変化を示します。
このチャートは、プロセスの平均値の変化と分散を同時に示し、プロセス内の異常をチェックするための非常に効果的な方法となるため、特に有用です。
XBar-Sグラフ
XBar-S管理図には、各サブグループの平均値(XBar)グラフと標準偏差(S)の両方が表示されます。
XBar-S管理図は、R(範囲)がS(標準偏差)に置き換えられる点を除いて、XBar-Rグラフと同じです。
計算統計値
Web HMIでは、計算された統計値がヒストグラム、XBar-Rグラフ、および XBar-Sグラフの下の情報ボックスに表示されます。
計算値は、読み取られるグラフによって異なります。
計算された統計値は次のとおりです:
最小 = 収集されたすべてのサンプル値の最小値
最大 = 収集されたすべてのサンプル値の最大値
平均 =
平均 + 3シグマ =
+ 3 * 標準偏差平均 - 3シグマ =
- 3 * 標準偏差Cp(XBar-R管理図では 、値は範囲に基づいており、 XBar-S管理図では値はシグマに基づきます)
Cpk(XBar-R管理図では 、値は範囲に基づいており、 XBar-S管理図では値はシグマに基づきます)
中心線 = 範囲内部分
 、およびシグマ部分
、およびシグマ部分 
目標(利用可能な場合はモニターの目標値)
標準偏差 = 全体の標準偏差 = 標準偏差
Mobil GUI
[結果]タブでの作業
ライブ結果
The Live Results tap shows results from the different virtual stations on the controller.
本セクションでは、Power Focus XCPower Focus XC コントローラで締め付け結果にアクセスする方法と、さまざまな結果表示で示される情報を読み取る方法について説明します。
イベントで示された情報を読む
詳細については、画像をポイントしてクリックしてください。
1 | 仮想ステーション名 |
2 | 結果ステータス |
3 | 締め付けプログラム名 |
4 | Message indicating the reason of the NOK result |
5 | 締め付けトルクNm |
6 | 目標トルク |
7 | 締め付け角ステータス |
8 | 目標角度 |
締め付けが行われると、結果はコントローラで保存されます。結果はまた、ToolsNet などの外部システムに送るか、エクスポート機能を使って分析のためにエクスポートすることができます。
本セクション内
プロトコルステータスの表示
ホームビューで、[レポート]タブを選択します。左側では、結果が自動的に選択されます。
In the upper-right corner, select the Protocol connection button
. [プロトコルステータス]ダイアログボックスが表示されます。ダイアログボックスのタブには、次の情報が表示されます:
タブ
説明
オープンプロトコル
開いているプロトコル接続のステータスを表示します:OK/NG
サーバー接続
ToolsTalkおよびToolsNetサーバーへの接続のステータスを表示します:OK/NG
構成設定を有効/無効に変更するには、 [設定] > [サーバー接続]に移動し、構成するサーバーを選択します。
起動ツールのステータス
さまざまなシステムアダプタの起動ツールのステータスを表示します。OK/NG
[閉じる]を選択します。
トラブルシューティングおよびサービス
このセクションでは、問題が発生した場合のトラブルシューティングを支援し、製品の保守とサービスに役立つ情報を提供します。
本セクション内
トラブルシューティング:WLAN と Bluetooth
問題 | 考えられる原因 | ソリューション |
|---|---|---|
ペアリングの失敗 (WLAN) | ツールが再起動され、コントローラーへの接続が失われました | ツールとコントローラーのペアリング |
ペアリングの失敗 (WLAN) | 他のツールが同時にペアリングしている | 他のすべてのツールがペアリング モードを終了していることを確認します。 |
ペアリングの失敗 (WLAN) | ツールが範囲外にある | ツールをコントローラに近づけ、ツールとコントローラ間に障害がないようにします |
ペアリングの失敗 (Bluetooth) | 他のツールが同時にペアリングしている | 他のすべてのツールがペアリング モードを終了していることを確認します。 |
ペアリングの失敗 (Bluetooth) | ツールが範囲外にある | ツールをコントローラに近づけ、ツールとコントローラ間に障害がないようにします |
ペアリングの失敗 (Bluetooth) | 他のツールからの干渉 | Bluetooth モジュールの感度が高い可能性があります。他の Bluetooth デバイスをコントローラから遠ざけるか、可能な場合は電源を切るようにしてください。 |
ペアリングの失敗 (Bluetooth) | 6 つすべてのスロットが使用され、6 つすべてのツールがバーチャルステーションに割り当てられている | バーチャルステーションから既存のペアリング済みのツールを 1 つ削除します (バーチャルステーションメニューのツールフィールドで) |
ツールリストからツールが消えた (Bluetooth) | 別のツールをペアリングすると、既存のツールが接続済みのツールリスト (ツールメニュー) から消える | ツールトリガーを引いて、リストに再度表示させます。 |
ツールリストからツールが消えた (Bluetooth) | ツールが無線動作範囲外にある場合、リストから消えることがある | ツールが無線動作範囲内にあることを確認して、ツールトリガーを押して、リストに再度表示されるようにします |
参考
このセクションでは、さまざまな有用な情報を見つけることができます。
用語および定義
用語 | 同意語 | 定義 | 注記 |
|---|---|---|---|
バッチ | 同じ締め付けプログラムとソケットを使用した複数の締め付け | ||
バッチシーケンス | シーケンス | 異なる締め付けプログラムとソケットの組み合わせを使用した複数の締め付け | |
イベント | コントローラとツールのステータス信号 | ||
最終角度 | 締め付けサイクルの終了時における実際の測定角度値 | ||
最終トルク | 締め付けサイクルの終了時における実際の測定トルク値 | ||
GUI | ディスプレイ上のウィンドウ、アイコン、シンボルなどのインタラクティブなグラフィカル要素からなるユーザーインターフェース |
| |
HMI | ヒューマンマシンインターフェース | ツールやコントローラのユーザーインターフェース | HMI として、コンピュータ Web ベースのインターフェースやコントローラタッチスクリーンが可能です。 |
DC IAM | インテリジェントアプリケーションモジュール | プログラム、構成パラメータおよび締め付け結果を含むコントローラのリムーバブルモジュール | |
回線構造 | ToolsTalk の構造、フォルダーまたはサブフォルダーへのコントローラの並べ替えおよびグループ化 | 回線構造は、構造的にコントローラの大規模グループの可視性を改善する方法です。 | |
Mobil GUI | リモートコンピュータから Web ブラウザーウィンドウを通したコントローラのユーザーインターフェース | ||
ポストビュートルク | ランダウン完了前にトルクの最大値と最小値を監視、検出する機能 | ポストビュートルクの1つの目的は、セルフロックナットを使用することです。 | |
締め付けプログラム | パラメーターセット | 単一締め付けアクションを管理、監視し、締め付け結果を保存するためのパラメーターと値の構成 | |
プッシュ | ToolsTalk に保存されたデータのコントローラメモリへの転送 | ||
QIF | 品質統合固定 | 工業用アセンブリシステムにおける締め付けで高品質とトレーサビリティを保証するナットランナ、コントローラ、アクセサリ、およびプロセス監視ツールの完全に統合されたライン | QIF はアトラスコプコで開発され、多くのジョイントが重要である自動車産業および他のアセンブリの状況で使用するのが好ましいです。QIF の概念には、プロセス監視やドキュメントが含まれています。 |
QIF アクセサリ | QIF で使用されるオペレータ通信とガイダンスのためのアクセサリ | アクセサリ製品は、システムとオペレーター間の通信で使用されます。 For example: scanner and socket selector. 通信は、アセンブリプロセスにおける品質とトレーサビリティを向上させます。 | |
クイックステップ | 締め付け戦略 | 所定の速度とトルクで最初のステップを組み合わせ、次に最終ステップの速度を低下させることで、ジョイントのプレロード散乱を低減させるための締め付け戦略。 | |
リヒット検出 | すでに締め付けたジョイントの再締め付けの検出 | ||
回転 | ツールヘッドを回転させる締め付け戦略。 | 回転は、主にテストやデモンストレーションのために使用されます。 | |
ランダウン完了 | ネジヘッドが表面と接触し、締め付けステップが始まった際のランダウンステップの終わり | ||
ランダウンステップ | ボルトヘッドが表面に接するまでボルトがスレッドに入った際のステップ | ||
スナッグ | ネジやボルトが表面に対してほぼフィンガータイト | ||
ソケットセレクタ | 正しいソケットにオペレーターを誘導するために使用できるランプ付きソケットトレイからなる QIF アクセサリ | ||
ソフトスタート | 指定された回転角度で低速で締め付けを開始します | この機能は、よく管理された方法でボルトをスレッドに入れるよう助け、トリガが押された際に不要な人間工学的ツールの動きを防止します。 | |
ターゲット | 締め付けの好ましい結果 | ターゲットはトルクか角度で表されます。 | |
ターゲット角度 | 基準点から測定した、締め付けサイクルの終了時における好ましい角度値 | ||
ターゲットトルク | 締め付けサイクルの終了時における好ましいトルク値 | ||
3 ステップ | 締め付け戦略 | 低速度で最終締め付け前の短い緩みステップが続く所定速度とトルクでの最初のステップでジョイントのプリロード散乱や緩和効果を減少させる締め付け戦略。 | |
締め付けステップ | 締め付けが所望のターゲットトルクもしくはターゲット角度に達するまでボルトヘッドが表面に到達した時点からのステップ | ||
締め付け戦略 | 締め付けプロセスを継続的に管理、監視するアルゴリズム | ユーザーは、ジョイントに対して最適化された戦略を選択し、特定のパラメーターをプログラムすることができます。 | |
TurboTight | 締め付け戦略 | 高速かつ人間工学的な締め付けを実施するツールの最大速度に基づく締め付け戦略。この戦略では、設定するターゲットトルク値のみ必要です。 | |
2 ステップ | 締め付け戦略 | 低速度で最終締め付け前の短時間の停止が続く所定速度とトルクでの最初のステップでジョイントのプリロード散乱や緩和効果を減少させる締め付け戦略。 | |
Web GUI | リモートコンピュータから Web ブラウザーウィンドウを通したコントローラのユーザーインターフェース | ||
仮想ステーション | 仮想コントローラ | 複数のコントローラのように動作する物理コントローラのソフトウェア抽象化 | コントローラは、それに接続されたケーブルツールを 1 つしか持つことができませんが、複数の無線ツールを持つことができます。各ツールは、それぞれ独自の仮想ステーションに接続されます。 |
仮想ステーションタイプ | コントローラ機能のバンドルを含むライセンス。 | このライセンスは仮想ステーションの実行に必要です。 | |
仮想ステーション機能 | 個々の機能のライセンス。 | 仮想ステーションタイプのライセンスを補完するために使用できます。 | |
コントローラ機能 | license for controller-wide features | コントローラ全体に割り当てられ、すべての仮想ステーションで使用できます。 |
入力信号
シーケンスの中止 - 10012
バッチシーケンス中止要求が受信されると、バッチシーケンス機能は、進行中の締め付け結果を取得した後にのみバッチシーケンスを中止します。
SoftPLCでの名前 :ABORT_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
シーケンスを中止して結果をクリア - 10127
信号「シーケンスを中止して結果をクリア」を設定すると、進行中のシーケンスが中止され、「結果のクリア」に関連する信号がクリアされます。
SoftPLCでの名前: ABORT_SEQ_AND_CLEAR_RES
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
イベントの確認 - 10004
イベントの確認。
SoftPLCでの名前 :ACKNOWLEDGE_EVENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツールスキャナの有効化 - 10075
外部ソースを通じてツールスキャナを有効化します。
SoftPLCでの名前 :ACTIVATE_TOOL_SCANNER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチ減分 - 10002
バッチカウンタを 1 づつ減分します。
SoftPLCでの名前 :BATCH_DECREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチ増分 - 10001
バッチカウンタを 1 づつ増分します。
SoftPLCでの名前 :BATCH_INCREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バイパス識別子 - 10123
文字列受信シーケンスで識別子文字列をバイパスするために使用されるソースバッチ文字列。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
締め付けプログラムのバイパス - 10008
実行中のバッチシーケンスの次の締め付けプログラムをスキップします。
SoftPLCでの名前 :BYPASS_PSET
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
マスターロック解除 - 10005
マスターアンロックは、以下の機能や信号のロックを解除する入力信号です。
機能:
締め付けOKで緩め無効
締め付けNOKで緩め無効
締め付け無効化
最大連続 NOK
シーケンス完了でツールをロック
信号:
20001 - 保留中のイベント確認ロック
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20013 - WorkTask ロック締め付け
20014 - WorkTask ロック緩め
20015 - バッチ完了lロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20022 - 締め付けOKで緩め無効
20023 - NG締め付けが多すぎるロック
20033 - ラインコントロールロック
20034 - 代替識別子によりツールがロックされました
SoftPLCでの名前 :MASTER_UNLOCK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
すべての識別子をリセット - 10115
ソースバッチ文字列において、文字列受信シーケンスから受信したすべての文字列識別子を一度にリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_ALL_IDENTIFIERS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチのリセット - 10003
バッチカウンタを 0 にリセットします。バッチ OK なし(nxOK)。バッチOKが有効化された場合、無効化されます。
SoftPLCでの名前 :RESET_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
バッチシーケンスのリセット - 10053
バッチシーケンスをリセットします。完了時にツールをロックによってロックされているツールのロックを解除します。
SoftPLCでの名前 :RESET_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
双安定リレーをリセット - 10022
双安定リレー出力をリセットします。
SoftPLCでの名前 :RESET_BISTABLE_RELAY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
最新の識別子をリセット - 10114
ソースバッチ文字列において、文字列受信シーケンスから受信した最新の文字列をリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_LATEST_IDENTIFIER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
多すぎるNGをリセット - 10013
[多すぎるNG] ロックを受けた後にバッチをリセットします
SoftPLCでの名前 :RESET_TOO_MANY_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
入力の選択 - 10020
シーケンス内のソース締め付け/バッチから締め付けプログラムを選択します。
SoftPLCでの名前 :SELECT_INPUT_VALUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
次の識別子番号を選択 - 10116
仮想ステーションのタスクが次のように構成されている場合は、[次の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「次の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「次の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:1、2、4、5、1、2、4…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、次の識別番号を選択します。
選択は、現在選択されているID番号から次に大きいID番号へと続きます。
最大の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に大きい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
識別子番号がソース締め付けリストに追加されていても、締め付けプログラムが割り当てられていない場合、ソース締め付けリストをループしている間、その番号はスキップされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「次の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「次の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「次の識別子番号を選択」信号が繰り返され、1、2、4、8、0、1、2 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「次の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_NEXT_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
前の識別子番号を選択 - 10117
仮想ステーションのタスクが次のように構成されている場合は、[前の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「前の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「前の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:5、4、2、1、5、4、2…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、前の識別番号を選択します。
選択は、現在選択されているID番号の前の小さいID番号へと続きます。
最小の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に小さい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「前の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「前の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「前の識別子番号を選択」信号が繰り返され、8、4、2、1、0、8、4 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「前の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_PREVIOUS_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
双安定リレーの設定 - 10021
双安定リレー出力を設定します。
SoftPLCでの名前 :SET_BISTABLE_RELAY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
完了時にツールをロック解除 - 10051
「完了時にツールをロック」によってロックされているツールのロックを解除します。
SoftPLCでの名前 :UNLOCK_TOOL_ON_COMPLETE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
無効時にツールのロック解除 - 10059
SoftPLCでの名前 :UNLOCK_TOOL_ON_DISABLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
出力信号
バッチ完了 - 30
「バッチ完了」は、バッチが完了したときにトリガーされる出力信号です。
バッチ結果のステータス(OKまたはNG)は、バッチ完了信号には影響しません。
SoftPLCでの名前 :BATCH_COMPLETED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ完了 NG - 37
バッチは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ完了 OK - 36
バッチは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチカウント - 31
バッチカウントは、バッチ内の現在の締め付け回数を示す出力信号です。
SoftPLCでの名前 :BATCH_COUNT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
バッチ実行中 - 32
バッチシーケンス内のバッチが実行中であることを示します。
SoftPLCでの名前 :BATCH_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ シーケンス完了 NG - 46
バッチシーケンスは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチシーケンス完了 OK - 45
バッチシーケンスは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチ シーケンス終了 - 48
シーケンスがいつ完了したかを示します。バッチシーケンス完了OKとバッチシーケンス完了NGの両方の場合です。
SoftPLCでの名前 :BATCH_SEQUENCE_COMPLETED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | ブール値 | 1 | 1 |
反転 | イベント | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
バッチシーケンス実行中 - 47
バッチシーケンスが実行中かどうかを示します。
SoftPLCでの名前 :BATCHSEQUENCE_RUNNING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
双安定リレー - 40
双安定リレーは、「双安定リレーの設定」と「双安定リレーのリセット」の入力によって制御される信号です。
入力「双安定リレーの設定」を受信した後、双安定リレー信号は真に設定されます。
入力「双安定リレーのリセット」を受信した後、双安定リレー信号は偽に設定されます。
「双安定リレーの設定」または「双安定リレーのリセット」が低になった場合、双安定リレーはその状態を維持します。
「双安定リレーの設定」または「双安定リレーのリセット」が高になると、双安定リレーの状態が変化します。
コントローラを再起動すると、双安定リレーはデフォルトで偽に設定されます。
SoftPLCでの名前 :BISTABLE_RELAY
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
校正アラーム - 138
ツールメンテナンス構成からのキャリブレーションアラーム。ツールのキャリブレーション時期を知らせる通知を提供します。
SoftPLCでの名前 :CALIBRATION_ALARM
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
コントローラスイッチオン - 42
IO Exchange の起動時に真に設定します。
SoftPLCでの名前 :IO_ON
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
現在実行中のバッチ - 180
現在実行中のバッチは、現在実行中のバッチのインデックスをシーケンスで示す出力信号です。
ユーザーがソケットセレクターを使用している場合、選択されているソケットがない、複数ある、または間違っていると、「ゼロ」が表示されます。
ユーザーがバッチモードを使用していて、バッチが実行されている場合、ソース締め付け構成に「1」が表示されます。
SoftPLCでの名前 :CURRENT_RUNNING_BATCH_IX
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
方向スイッチ CCW - 13
ツールの方向スイッチを反時計回り方向に回します。
SoftPLCでの名前 :DIRECTION_SWITCH_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
方向スイッチ CW - 12
ツールの方向スイッチを時計回り方向に回します。
SoftPLCでの名前 :DIRECTION_SWITCH_CW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
イベントが存在 - 161
イベントがトリガーされたかどうかを示します。イベントがACKを必要とする場合のみ、アクセサリでトリガーされます。
SoftPLCでの名前 :EVENT_PRESENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
最終角度 - 8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 浮動 | 0 | 0 |
デバイス
フィールドバス:FALSE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
最終トルク - 5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 浮動 | 1 | 1 |
デバイス
フィールドバス:FALSE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
高角度 - 10
角度の結果が高すぎます。
SoftPLCでの名前 :HIGH_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
高トルク - 7
トルクの結果が、最大トルク範囲よりも高い。
SoftPLCでの名前 :HIGH_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
受信識別子 - 100
SoftPLCでの名前 :IDENTIFIER_RECEIVED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ライセンスサーバー接続が失われました - 134
アトラスコプコのライセンスサーバーへの接続が失われたか、同期に失敗したことを示します。信号は、ライセンスマネージャーの同期が正常に完了するとクリアされます
SoftPLCでの名前 :LICENSE_SERVER_CONN_LOST
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め無効 - 184
緩め無効は、緩めが次の信号のいずれかによって外部的にロックされたときに有効化する出力信号です:
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20021 - フィールドバスロック緩め
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :LOOSENING_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め有効 - 185
緩め有効は、緩めが次の信号のいずれかによって外部的にロックされていないときに有効化する出力信号です:
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20021 - フィールドバスロック緩め
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :LOOSENING_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩めがロック済み - 28
緩めが無効です。
SoftPLCでの名前 :LOOSENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め NG - 74
NG 緩みが行われました。
SoftPLCでの名前 :LOOSENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
緩め OK - 70
OK 緩みが行われました。
SoftPLCでの名前 :LOOSENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
低角度 - 9
角度の結果が、最小角度範囲よりも低い。
SoftPLCでの名前 :LOW_ANGLE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
低トルク - 6
トルクの結果が、最小トルク範囲よりも低い。
SoftPLCでの名前 :LOW_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
手動モード - 101
サポートされており構成されたアクセサリに、手動モードの仮想ステーションのステータスを示します
SoftPLCでの名前 :MANUAL_MODE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
最大連続 NG になりました - 35
最大干渉 NG 締め付けカウンターに達したことを示します。
SoftPLCでの名前 :MAX_COHERENT_NOK_REACHED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
オープンエンドが開放位置にあります - 89
オープンエンドツールが開放位置にあります。
SoftPLCでの名前 :OPEN_END_IN_OPEN_POSITION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:FALSE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
オープンプロトコル切断 - 95
仮想ステーションでオープンプロトコルがオフに設定されている場合、「オープンプロトコル切断」信号は偽に設定されます。
仮想ステーションでオープンプロトコルがオンになっている場合、「オープンプロトコル切断」信号は真に設定されます。
少なくとも1つのクライアント(複数のオープンプロトコルクライアントが同じ仮想ステーションに接続可能)が接続されると、「オープンプロトコル切断」信号が偽に設定されます。
SoftPLCでの名前 :OPEN_PROTOCOL_DISCONNECTED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
パルスツールアラームオイルレベルが空 - 167
ツールのメンテナンスで構成されたオイルレベルの監視は、パルスツールでオイルを充填する時期をユーザーに通知するメカニズムを提供します。トリガーが押されても、信号はユーザーに通知されません。
ツールが切断されると、信号はクリアされます。次に、ツールが接続されたときに条件が有効な場合はツールから再度送信されます。
SoftPLCでの名前 :TOOL_OIL_LEVEL_EMPTY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
開始準備完了 - 29
ツールが仮想ステーションに接続されており、有効な締め付けロックがなく、非常停止が有効でなく、有効な締め付けプログラムが選択されている場合、この信号は締め付けを開始できることを示します。
SoftPLCでの名前 :READY_TO_START
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
残りのバッチ - 33
バッチ内の残りの締め付け。ディスプレイでのみ表示できます。
SoftPLCでの名前 :REMAINING_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ランダウン角度高 - 165
この信号は、プログラムレベルのランダウン角度が設定された角度よりも高い場合に有効化されます。
SoftPLCでの名前 :RUNDOWN_ANGLE_HIGH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ランダウン角度低 - 166
この信号は、プログラムレベルのランダウン角度が設定された角度よりも低い場合に有効化されます。
SoftPLCでの名前 :RUNDOWN_ANGLE_LOW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
選択のシーケンス ID - 84
選択したバッチシーケンスのインデックスを表示します。
SoftPLCでの名前 :SELECTED_BATCH_SEQUENCE_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
選択された締め付けプログラム - 69
選択した締め付けプログラムの実際の ID。締め付けプログラムが選択されなければ 0。
SoftPLCでの名前 :SELECTED_PSET_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
シーケンス中止済み - 160
シーケンスが中止されたかどうかを示す出力信号。
SoftPLCでの名前 :SEQUENCE_ABORTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
サービスインジケータアラーム - 137
ツールのメンテナンスで構成されたサービスアラームは、ツールをサービスする時期をユーザーに通知するメカニズムを提供します。
SoftPLCでの名前 :SERVICE_INDICATOR_ALARM
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
シーケンスのサイズ - 181
現在実行中のシーケンスのサイズが表示されます。シーケンスが読み込まれたときにのみ設定され、シーケンスが完了したときにリセットされません。
SoftPLCでの名前 :SIZE_OF_RUNNING_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ステーション準備完了 - 71
仮想ステーションの準備がいつ完了するかを示します。
SoftPLCでの名前 :STATION_READY
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
目標トルク - 30100
実行された締付けの目標トルクを表示する信号。
最後のステップの [ステップカテゴリ] を [最終] に設定します。STセレクターは、最後のステップにトルクターゲットがある場合にのみターゲットトルクを表示します。
SoftPLCでの名前 :STSELECTOR_TARGET_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 1 | 1 |
デバイス
フィールドバス:FALSE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
目標/最終トルク - 30101
目標/最終トルクを交互に表示する信号。
選択した締め付けプログラムが更新された場合、または新しい締め付けプログラムが選択された場合、目標/最終トルクは目標トルクと最終トルクの間にあります。
最後のステップの [ステップカテゴリ] を [最終] に設定します。STセレクターは、最後のステップにトルクターゲットがある場合にのみターゲットトルクを表示します。
SoftPLCでの名前 :STSELECTOR_TARGET_FINAL_TORQUE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | 整数 | 1 | 1 |
デバイス
フィールドバス:FALSE
インジケータボックス: FALSE
内部入出力:FALSE
オペレータパネル: FALSE
ツール機能:FALSE
ST セレクタ:TRUE
スタックライト: FALSE
TLS タグ:FALSE
入出力拡張器: FALSE
ネジ方向 CCW - 26
選択した締め付けプログラムでは、スレッド方向として反時計回りが択されています。
SoftPLCでの名前 :THREAD_DIRECTION_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け無効 - 182
締め付け無効は、締め付けが次の信号のいずれかによって外部的に無効化されたときに有効化する出力信号です:
20002 - ロック締め付け
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20040 - Soft PLCロック締め付け
20061 - 低でロックツール有効
SoftPLCでの名前 :TIGHTENING_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け有効 - 183
締め付け有効は、締め付けが次の信号のいずれかによって外部的に無効化されていないときに有効化する出力信号です:
20002 - ロック締め付け
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20040 - Soft PLCロック締め付け
20061 - 低でロックツール有効
SoftPLCでの名前 :TIGHTENING_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付けがロック済み - 27
締め付けは無効です。締め付けはできません。
SoftPLCでの名前 :TIGHTENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け NG - 4
少なくとも 1 つの締め付けの結果が指定範囲外であることを示します。
SoftPLCでの名前 :TIGHTENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け OK - 3
締め付けの結果が指定範囲内であることを示します。
SoftPLCでの名前 :TIGHTENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
締め付け時間高 - 135
実行時間が許容最大値を超えたためにNGの締め付けが発生したかどうかを示します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
入出力拡張器: TRUE
TLS タグ:FALSE
締め付け時間低 - 136
実行時間が許容最小値を引き下げたことにより、NGの引き締めが発生したかどうかを示します。
締め付け時間低信号は、締め付けプログラムでのみ機能します。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツールバッテリー残量低 - 90
SoftPLCでの名前 :TOOL_BATTERY_LOW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
接続ツール - 73
ツールが仮想ステーションに接続されているかどうかを示します。
SoftPLCでの名前 :TOOL_CONNECTED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール無効 - 158
ツール無効は、ツールが次の信号のいずれかによって外部的に無効化されたときに有効化する出力信号です:
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20040 - Soft PLCロック締め付け
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :TOOL_DISABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール有効 - 159
ツール有効は、ツールが次の信号のいずれかによって外部的に無効化されていないときに有効化する出力信号です:
20002 - ロック締め付け
20003 - ロック緩め
20004 - 高でロックツール有効
20033 - ラインコントロールロック
20018 - オープンプロトコルロック
20020 - フィールドバスロック締め付け
20021 - フィールドバスロック緩め
20040 - Soft PLCロック締め付け
20041 - Soft PLCロック緩め
20061 - 低でロックツール有効
SoftPLCでの名前 :TOOL_ENABLED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール機能ボタンが押されました - 179
機能ボタンの状態を追跡する出力信号。信号は、機能ボタンが押されると設定され、機能ボタンが放されるとクリアされます。バッテリーツールの場合、重要な用途には使用できません。
SoftPLCでの名前 :FUNCTION_BUTTON_PRESSED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス: FALSE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
ツール正常性 OK - 103
ツールエラーが存在しない場合はツール正常性OKが高であり、次のいずれかのツールエラーが設定されている場合はツール正常性OKが低となります。
ツールがオーバーヒート
ツールのモーター調節が必要です。
オープンエンドが調整されていません
ツールパラメータファイルがサポートされていません。
ツールバッテリ低
ツールトリガの監督失敗
ツールケーブルがサポートされていません
ツールメモリー障害
ツールメモリが破損しています。
ツールサービス間隔が過ぎています。
ツールソフトウェアバージョンが一致していません。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール LED ミラー緑 - 98
アクセサリに表示されるツールの緑色のLEDステータス信号。
ツールのグリーンLEDがオン/点滅している場合、ツール LED ミラー緑信号はTrueに設定されます。
ツールのグリーンLEDがオフの場合、ツール LED ミラー緑信号はFalseに設定されます。
SoftPLCでの名前 : TOOL_RESULT_LED_GREEN
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール LED ミラー赤 - 97
アクセサリに表示されるツールの赤色のLEDステータス信号。
ツールの赤LEDがオン/点滅している場合、ツール LED ミラー赤信号はTrueに設定されます。
ツールの赤LEDがオフの場合、ツール LED ミラー赤信号はFalseに設定されます。
SoftPLCでの名前 : TOOL_RESULT_LED_RED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール LED ミラー黄 - 99
アクセサリに表示されるツールの黄色のLEDステータス信号。
ツールの黄LEDがオン/点滅している場合、ツール LED ミラー黄信号はTrueに設定されます。
ツールの黄LEDがオフの場合、ツール LED ミラー黄信号はFalseに設定されます。
SoftPLCでの名前 : TOOL_RESULT_LED_YELLOW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール緩め - 22
ツールが緩められていることを示します。
SoftPLCでの名前 :TOOL_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール回転 CCW - 25
ツール回転方向が左スレッドネジで反時計回りです。
SoftPLCでの名前 :TOOL_ROTATION_CCW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール回転 CW - 24
ツール回転方向が右スレッドネジで時計回りです。
SoftPLCでの名前 :TOOL_ROTATION_CW
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール実行中 - 23
ツールが回転中(時計回り[CW]または反時計回り[CCW])であることを示します。
SoftPLCでの名前 :TOOL_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ツール締め付け - 21
ツールが締め付けられていることを示します。
SoftPLCでの名前 :TOOL_TIGHTENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:FALSE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
ToolsNet 接続が失われました - 133
ToolsNetとコントローラー間の有効な接続が中断されたか、期待どおりに機能しているかを示します。
SoftPLCでの名前 : TOOLSNET_CONNECTION_LOST
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
トリガが押されました - 11
ツールトリガが押されたことを示します。
SoftPLCでの名前 :TRIGGER_PRESSED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
入出力信号
オープンプロトコルコマンドを無効化 - 10060
オープンプロトコルを介して仮想ステーションにコマンドを送信する機能を無効にします。
SoftPLCでの名前 :DISABLE_OPEN_PRTCOL_CMDS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 1 - 10035
外部監視1は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 2 - 10036
外部監視2は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 3 - 10037
外部監視3は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 4 - 10038
外部監視4は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 5 - 10039
外部監視5は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_5
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 6 - 10040
外部監視6は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_6
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 7 - 10041
外部監視7は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_7
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
外部監視 8 - 10042
外部監視8は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_8
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
フラッシュツール緑 LED(外部プロトコル) - 10058
SoftPLCでの名前 :FLASH_TOOL_GREEN_LED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:FALSE
入出力拡張器: TRUE
汎用 I/O 1 - 50
オープンプロトコルに使用される入出力 1。
SoftPLCでの名前 :GENERIC_IO_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 2 - 51
オープンプロトコルに使用される入出力 2。
SoftPLCでの名前 :GENERIC_IO_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 3 - 52
オープンプロトコルに使用される入出力 3。
SoftPLCでの名前 :GENERIC_IO_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 4 - 53
オープンプロトコルに使用される入出力 4。
SoftPLCでの名前 :GENERIC_IO_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 5 - 54
オープンプロトコルに使用される入出力 5。
SoftPLCでの名前 :GENERIC_IO_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 6 - 55
オープンプロトコルに使用される入出力 6。
SoftPLCでの名前 :GENERIC_IO_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 7 - 56
オープンプロトコルに使用される入出力 7。
SoftPLCでの名前 :GENERIC_IO_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 8 - 57
オープンプロトコルに使用される入出力 8。
SoftPLCでの名前 :GENERIC_IO_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 9 - 58
オープンプロトコルに使用される入出力 9。
SoftPLCでの名前 :GENERIC_IO_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
汎用 I/O 10 - 59
オープンプロトコルに使用される入出力 10。
SoftPLCでの名前 :GENERIC_IO_10
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:TRUE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
製造スペース内のツール - 93
SoftPLCでの名前 :TOOL_IN_PRODUCT_SPACE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
作業スペース内のツール - 92
SoftPLCでの名前 :TOOL_IN_WORK_SPACE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス: TRUE
インジケータボックス:TRUE
内部入出力:TRUE
オペレータパネル: TRUE
ツール機能:TRUE
ST セレクタ:FALSE
スタックライト: TRUE
TLS タグ:TRUE
入出力拡張器: TRUE
サードパーティライセンス
List of Third Party Softwares
The following third party softwares are included in this product. The license texts are available in alphabetic order following this table.
Software | Version | License |
|---|---|---|
alsa-conf-base | 1.0.27.2 | LGPL V2.1 |
alsa-lib | 1.0.27.2 | LGPL V2.1 |
alsa-state | 0.2.0 | MIT |
alsa-states | 0.2.0 | MIT |
alsa-tools | 1.0.27 | GNU GPL V2 |
alsa-utils | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aconnect | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsactl | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsaloop | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsamixer | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsaucm | 1.0.27.2 | GNU GPL V2 |
alsa-utils-amixer | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aplay | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aseqdump | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aseqnet | 1.0.27.2 | GNU GPL V2 |
alsa-utils-iecset | 1.0.27.2 | GNU GPL V2 |
alsa-utils-midi | 1.0.27.2 | GNU GPL V2 |
alsa-utils-speakertest | 1.0.27.2 | GNU GPL V2 |
apm | 3.3.2-14 | GPLv2 |
apmd | 3.2.2-14 | GPLv2 |
atftpd | 0.7.1+gitAUTOINC+be3291a18c | GNU GPL V2 |
base-files | 3.0.14 | GNU GPL V2 |
base-passwd | 3.5.29 | GNU GPL V2 |
bash | 4.3 | GNU GPL V3 |
bash-completion | 2.1 | GNU GPL V2 |
bluetooth-test | 1.0 | GNU GPL V1.0 |
boost | 1.55.0 | BSL-1.0 MIT Python-2.0 |
boost-serialization | 1.55.0 | BSL-1.0 MIT Python-2.0 |
boost-test | 1.55.0 | BSL-1.0 MIT Python-2.0 |
bt-aux | 1.0 | GNU GPL V1.0 |
busybox | 1.22.1 | GNU GPL V2 |
busybox-cron | 1.22.1 | GNU GPL V2 |
busybox-hwclock | 1.22.1 | GNU GPL V2 |
busybox-udhcpc | 1.22.1 | GNU GPL V2 |
busybox-udhcpd | 1.22.1 | GNU GPL V2 |
ca-certificates | 20130610 | GNU GPL V2 |
cppunit | 1.13.1 | LGPL V2.1 |
curl | 7.35.0 | MIT |
dbus-1 | 1.6.18 | GNU GPL V2 |
dbus-c++ | 0.9.0+gitrAUTOINC+1f6f3e6e96 | LGPL V2.1 |
directfb-config | 1.0 | GNU GPL V1.0 |
dropbear | 2014.63 | BSD V3 |
e2fsprogs | 1.42.9 | GNU GPL V2 |
e2fsprogs-badblocks | 1.42.9 | GNU GPL V2 |
e2fsprogs-e2fsck | 1.42.9 | GNU GPL V2 |
e2fsprogs-mke2fs | 1.42.9 | GNU GPL V2 |
e2fsprogs-tune2fs | 1.42.9 | GNU GPL V2 |
eclr | 2.2.0.20725 | MIT |
ecryptfs-tools | 1.0 | GNU GPL V1.0 |
fbset | 2.1 | GNU GPL V2 |
fbset-modes | 0.1.0 | MIT |
fb-test | 1.1.0 | GNU GPL V2 |
fieldbus-test | 1.0 | GNU GPL V1.0 |
firmware-imx | 3.10.17-1.0.0 | Proprietary |
firmware-imx-sdma-imx51 | 3.10.17-1.0.0 | Proprietary |
firmware-imx-vpu-imx51 | 3.10.17-1.0.0 | Proprietary |
fsb | 0.0.1 | GNU GPL V1.0 |
gdbserver | 7.6.2 | GNU GPL V2 |
gnutls | 3.2.13 | LGPL V2.1 |
gpio | 1.0 | GNU GPL V1.0 |
groupexec | 0.0.1 | GNU GPL V1.0 |
gstreamer | 0.10.36 | LGPL V2.1 |
gstreamer1.0 | 1.2.3 | LGPL V2.1 |
gwt | 2.6.1 | Apache V2 |
gwt-ns | 0.2.1 | Apache V2 |
hwtest | 1.1 | GPL-1.0 |
Initscripts | 1.0 | GPLv2 |
initscripts-functions | 1.0 | GPLv2 |
ioaccess | 1.0 | GPL-1.0 |
ipwatchd | 1.2 | GPL-1.0 |
json-c | 0.11 | MIT |
kernel-3.14.79-rt84-atlas | 3.14 | GNU GPL V2 |
kernel-base-generic | 0.1+hg-8d6f9d23fb4a-r8-px2pfm4.12 | GNU GPL V2 |
kernel-base-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-dev-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-devicetree | 3.14 | GNU GPL V2 |
kernel-dev-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-image-3.14.79-rt84-atlas | 3.14 | GNU GPL V2 |
kernel-module-configfs | 3.14 | GPLv2 |
kernel-module-emergencystop | 0.0.1 | MIT |
kernel-module-evbug | 3.14 | GPLv2 |
kernel-module-ioaccess | 1 | GNU GPL V2 |
kernel-module-isofs | 3.14 | GPLv2 |
kernel-module-msdos | 3.14 | GPLv2 |
kernel-module-nls-iso8859-15 | 3.14 | GPLv2 |
kernel-module-owl2xx | 3.1.6 | MIT |
kernel-module-owl2xx-spi | 3.1.6 | MIT |
kernel-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-module-serport | 3.14 | GPLv2 |
kernel-module-udf | 3.14 | GPLv2 |
kernel-modules | 3.14 | GPLv2 |
kernel-vmlinux-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-vmlinux-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
keytest | 1 | GNU GPL V1.0 |
keyutils | 1.5.2 | GNU GPL V2 |
kmsfbwrap | 12.0 | GNU GPL V2 |
libanybus1 | 1.1 | LICENSE |
libapm1 | 3.2.2-14 | GPLv2 |
libasound2 | 1.0.27.2 | LGPL V2.1 |
libblkid1 | 2.24.1 | GNU GPL V2 |
libboost-date-time1.55.0 | 1.55.0 | MIT |
libboost-filesystem1.55.0 | 1.55.0 | MIT |
libboost-graph1.55.0 | 1.55.0 | MIT |
libboost-iostreams1.55.0 | 1.55.0 | MIT |
libboost-program-options1.55.0 | 1.55.0 | MIT |
libboost-regex1.55.0 | 1.55.0 | MIT |
libboost-signals1.55.0 | 1.55.0 | MIT |
libboost-system1.55.0 | 1.55.0 | MIT |
libboost-thread1.55.0 | 1.55.0 | MIT |
libbz2-0 | 1.0.6 | bzip2 |
libc6 | 2.19 | GNU GPL V2 |
libcap2 | 2.22 | BSD V2 |
libcom-err2 | 1.42.9 | GNU GPL V2 |
libcrypto1.0.0 | 1.0.1p | openssl |
libcurl5 | 7.36.0 | MIT |
libdbus-1-3 | 1.6.18 | GNU GPL V2 |
libdrm2 | 2.4.52 | MIT |
libe2p2 | 1.42.9 | GNU GPL V2 |
libegl1 | 11.09.01 | Proprietary |
libestr0 | 0.1.6 | LGPL V2.1 |
libevent | 2.0.21 | BSD V2 |
libexpat1 | 2.1.0 | MIT |
libext2fs2 | 1.42.9 | GNU GPL V2 |
libffi6 | 3.0.13 | MIT |
libformw5 | 5.9 | MIT |
libfuse2 | 2.9.3 | GNU GPL V2 |
libgcc1 | 4.8.4 | GNU GPL V3 |
libgcrypt11 | 1.5.3 | LGPL V2.1 |
libglesv2-2 | 11.09.01 | Proprietary |
libglib-2.0-0 | 2.38.2 | LGPL V2.1 |
libgmp10 | 5.1.1 | GNU GPL V3 |
libgnutls26 | 2.12.23 | GPLv3 LGPLv2.1 |
libgpg-error0 | 1.12 | LGPL V2.1 |
libgsl-fsl1 | 11.09.01 | Proprietary |
libgstapp-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstaudio-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstpbutils-1.0-0 | 1.2.4 | GNU GPL V2 |
libgsttag-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstvideo-1.0-0 | 1.2.4 | GNU GPL V2 |
libicudata53 | 53.1 | ICU |
libicui18n53 | 53.1 | ICU |
libicuuc53 | 53,1 | ICU |
libjpeg8 | 8d | BSD V3 |
libkmod2 | 17+ | LGPL V2.1 |
libluabind0 | git | MIT |
liblzo2-2 | 2.06 | LGPL V2.1 |
libmenuw5 | 5.9 | MIT |
libmount1 | 2.24.2 | GNU GPL V2 |
libncursesw5 | 5.9 | MIT |
libnet1 | 1.1.6 | BSD V2 |
libnfsidmap0 | 0.25 | BSD V2 |
libopkg1 | 0.2.2 | GNU GPL V2 |
liborc-0.4-0 | 0.4.18 | BSD V2 |
libpanelw5 | 5.9 | MIT |
libpcap1 | 1.5.3 | BSD V2 |
libpcre1 | 8.34 | BSD |
libperl5 | 5.14.3 | GNU GPL V1.0 |
libpng16-16 | 1.6.10 | Libpng |
libpopt0 | 1.16 | MIT |
libpx2dbus | 1.0.0 | GNU GPL V1.0 |
libqt5sensors5 | 5.3.1 | LGPL V2.1 |
librcf | 2.0 | Proprietary |
libreadline6 | 6.3 | GNU GPL V3 |
libsamplerate0 | 0.1.8 | GNU GPL V2 |
libsndfile1 | 1.0.25 | LGPL V2.1 |
libsqlite3-0 | 3.8.4.3 | PD |
libss2 | 1.42.9 | GNU GPL V2 |
libssl1.0.0 | 1.0.1p | openssl |
libstdc++6 | 4.8.4 | GNU GPL V3 |
libthread-db1 | 2.19 | GNU GPL V2 |
libsysfs2 | 2.1.0 | GPLv2 LGPLv2.1 |
libtasn1-6 | 3.4 | GPLv3 LGPLv2.1 |
libtinfo5 | 5.9 | MIT |
libtinyxml2.6.2 | 2.6.2 | Zlib |
libtirpc1 | 0.2.4 | BSD V2 |
libts-1.0-0 | 1.1 | LGPL V2.1 |
libudev0 | 182 | LGPL V2.1 |
liburcu | 0.8.1 | LGPL V2.1 |
libusb-1.0-0 | 1.0.9 | LGPL V2.1 |
libuuid1 | 2.24.2 | GNU GPL V2 |
libwrap0 | 7.6 | BSD V2 |
libxml2 | 2.9.1 | MIT |
libxlst | 1.1.28 | MIT |
libz1 | 1.2.8 | Zlib |
logrotate | 3.8.7 | GNU GPL V2 |
log-server | 1.0 | GNU GPL V1.2 |
loopback | 1.0 | GNU GPL V1.2 |
lttng-tools | v2.4.0 | GNU GPL V2 |
lttng-ust | 2.4.0 | LGPL V2.1 |
lua5.1 | 5.1.5 | MIT |
luabind | 0.9.1 | MIT |
lzop | 1.03 | GNU GPL V2 |
memlogd | 1.0 | MIT |
modutils-initscripts | 1.0 | PD |
mtd-utils | 1.5.1 + gitAUTOINC+9f107132a6 | GNU GPL V2 |
nano | 2.2.5 | GNU GPL V2 |
ncurses | 5.9 | MIT |
ncurses-terminfo | 5.9 | MIT |
ncurses-terminfo-base | 5.9 | MIT |
netbase | 5.2 | GNU GPL V2 |
nettle | 2.7.1 | LGPL V2.1 |
nfs-utils | 1.2.9 | GNU GPL V2 |
nfs-utils-client | 1.2.9 | GNU GPL V2 |
nginx | 1.4.4 | BSD-2-Clause |
ntp | 4.2.6p5 | Ntp License |
ntp-tickadj | 4.2.6p5 | Ntp License |
ntp-utils | 4.2.6p5 | Ntp License |
ntpdate | 4.2.6p5 | Ntp License |
openssh | 6.5p1 | BSD |
openssh-keygen | 6.5p1 | BSD |
openssh-scp | 6.5p1 | BSD |
openssh-sftp | 6.5p1 | BSD V2 |
openssh-sftp-server | 6.5p1 | BSD V2 |
openssh-ssh | 6.5p1 | BSD V2 |
openssh-sshd | 6.5p1 | BSD V2 |
openssl-conf | 1.0.1p | openssl |
opkg | 0.2.2 | GNU GPL V2 |
opkg-collateral | 1.0 | MIT |
opkg-config-base | 1.0 | MIT |
os-release | 1.0 | MIT |
packagegroup-atlas-qt5 | 1 | MIT |
packagegroup-core-boot | 1 | MIT |
packagegroup-core-eclipse-debug | 1 | MIT |
packagegroup-core-nfs-server | 1 | MIT |
packagegroup-core-ssh-dropbear | 1 | MIT |
packagegroup-px2it | 1 | MIT |
partitions | 1.0 | MIT |
perl | 5.14.3 | GNU GPL V1.0 |
pfmfonts | 0.0.1 | Apache V2 |
pfmtool | 1 | MIT |
pfmtool-bash-completion | 1 | MIT |
pfmversion | 5.14.0 | MIT |
pointercal | 0.0 | MIT |
poky-feed-config-opkg | 1.0 | MIT |
px2checksumv | 1.0 | MIT |
px2hal | 0.0.1 | LGPL-3.0 |
px2initit | 1.0 | GPL-1.0 |
px2network | 1.0 | GPL-1.0 |
px2serviced | 1.0 | GPL-1.0 |
px2switch | 0.0.1 | GPL-1.0 |
px2w | 0.0.1 | GPL-1.0 |
px2watchdog | 1.0 | GPL-1.0 |
qcustomplot | 1.2.1 | Commercial |
qt3d | 5.3.0+ | LGPL V2.1 |
qtbase | 5.3.1 | LGPL V2.1 |
qtbase-plugins | 5.3.1 | LGPL V2.1 |
qtbase-tools | 5.3.1 | LGPL V2.1 |
qtdeclarative | 5.3.1 | LGPL V2.1 |
qtlocation | 5.3.1 | LGPL V2.1 |
qtscript | 5.3.1 | LGPL V2.1 |
qtwebkit | 5.3.1 | LGPL V2.1 |
rhapsody-oxf | 7521 | GNU GPL V1.0 |
rpcbind | 0.2.1 | BSD V2 |
rsync | 3.1.0 | GNU GPL V3 |
rsyslog | 7.4.4 | GNU GPL V3 |
rtctest | 1.0 | GNU GPL V1.0 |
run-postinsts | 1.0 | MIT |
shadow | 4.1.4.3 | BSD V2 |
shadow-securetty | 4.1.4.3 | MIT |
sqlite3 | 3.8.4.3 | PD |
ssh-keys | 1.0 | GNU GPL V1.0 |
strace | 4.8 | BSD V2 |
sysfsutils | 2.1.0 | GPLv2 LGPLv2.1 |
sysvinit | 2.88dsf | GNU GPL V2 |
sysvinit-inittab | 2.88dsf | GNU GPL V2 |
sysvinit-pidof | 2.88dsf | GNU GPL V2 |
tcf-agent | 0.4.0+ | EPL V1.0 |
tcpdump | 4.3.0 | BSD V2 |
tslib-calibrate | 1.1 | LGPL V2.1 |
tslib-conf | 1.1 | LGPL V2.1 |
tslib-tests | 1.1 | LGPL V2.1 |
tzdata | 2013i | BSD V2 |
tzdata-africa | 2013i | BSD V2 |
tzdata-americas | 2013i | BSD V2 |
tzdata-antarctica | 2013i | BSD V2 |
tzdata-arctic | 2013i | BSD V2 |
tzdata-asia | 2013i | BSD V2 |
tzdata-atlantic | 2013i | BSD V2 |
tzdata-australia | 2013i | BSD V2 |
tzdata-europe | 2013i | BSD V2 |
tzdata-misc | 2013i | BSD V2 |
tzdata-pacific | 2013i | BSD V2 |
tzdata-posix | 2013i | BSD V2 |
tzdata-right | 2013i | BSD V2 |
u-boot-image | 2014.04 | GNU GPL V2 |
u-boot-utils | 2014.04 | GNU GPL V2 |
udev | 182 | GNU GPL V2 |
udev-cache | 182 | GNU GPL V2 |
udev-extraconf | 1.0 | MIT |
udev-utils | 182 | GNU GPL V2 |
update-alternatives-opkg | 0.1.8+gitAUTOINC+c33b217016 | GNU GPL V2 |
update-rc.d | 0.7 | GNU GPL V2 |
usbutils | 7 | GNU GPL V2 |
usbutils-ids | 7 | GNU GPL V2 |
wireless-tools | 30.pre9 | GNU GPL V2 |
wpa-supplicant | 2.3 | BSD V2 |
wpa-supplicant-cli | 2.3 | BSD V2 |
wpa-supplicant-passphrase | 2.3 | BSD V2 |
xerces-c | 2.7.0aes | Apache V2 |
zipfirmware-install-px2drv-tplcpx-4. | 3.0 | BSD V3 |