剩余点检测算法
为检测扭矩/角度剩余点,STRwrench 采用了一种算法,每次采集新样本时都会通过线性回归计算扭矩/角度轨迹的梯度 αt。然后,该算法计算六个不同 αt 值的平均值:

αaverage 值用于确定剩余点。
算法应用场景
场景 A
当高静摩擦力积聚在接头处时(例如由于缺乏润滑),一旦螺栓移动,扭矩就会下降,实际剩余扭矩低于克服静摩擦力所需的峰值扭矩。在这种情况下,STRwrench 算法会监测 αaverage:如果 αaverage 为负值,则算法会等待,直到 αaverage 变回正值。αaverage 回到正值的点被视为剩余扭矩点。

A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |
场景 B
通常,在分离期间,当螺栓开始移动时,扭矩/角度函数的梯度会出现快速变化。STRwrench 算法将扭矩/角度轨迹与从图形原点到轨迹实际点绘制的直线之间的最大距离 (d) 点作为分离点。此距离必须大于阈值,且必须对于多个样本都保持一致。
此外,分离点之后的轨迹部分的平均斜率必须小于分离点之前的迹线部分的平均斜率的 60%。
如果满足所有这些条件,则测试结束,并检测到分离/剩余点。
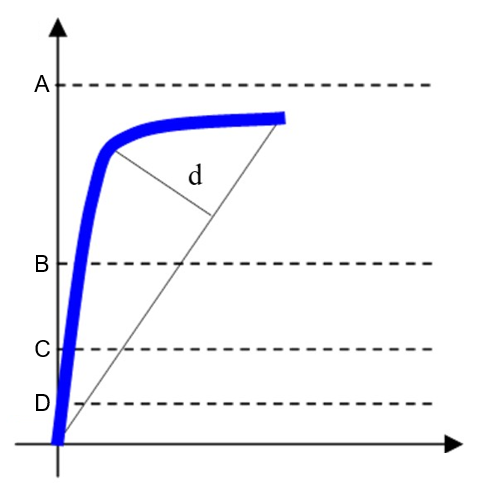
A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |
d | 轨迹与直线之间的最大距离。 | ||
推荐设置
循环起始点 | 设置一个大于等于 smartHEAD 容量的 2% 的值。 |
最终角度监测扭矩 | 在循环开始和最小扭矩之间设置一个值。 |
最小扭矩 | 设置最小剩余扭矩值,以获得 OK 结果。 |
最大扭矩 | 设置最大剩余扭矩值,以获得 OK 结果。 |
例如,使用带有 80 N∙m smartHEAD 的 STRwrench 检测拧紧到 50 N∙m 的螺栓上的剩余点时,正确的设置如下:

A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |









































