残留ポイント検出アルゴリズム
トルク/角度の残留ポイントを検出するため、STRwrenchは、新しいサンプルが収集されるたびに線形回帰によってトルク/角度トレースの勾配 αt を計算するアルゴリズムを使用します。次に、アルゴリズムは次の 6 つの異なる αt 値の平均を計算します。

α平均を使用して残留ポイントを特定します。
アルゴリズム適用のシナリオ
シナリオ A
ジョイントに (潤滑不足などにより) 高い静摩擦が発生すると、ボルトが動くとすぐにトルクが減少し、実際の残留トルクは静摩擦を克服するのに必要なピークトルクよりも低くなります。この場合、STRwrench アルゴリズムは α 平均を監視します: α平均が負の値の場合、アルゴリズムは α平均が正の値に戻るまで待機します。α平均が正の値に戻る点が、残留トルクポイントとみなされます。

A | 最大トルク | B | 最小トルク |
C | 最終角度監視トルク | D | サイクル開始 |
シナリオ B
通常、ボルトが動き始めると、離脱時にトルク/角度関数の勾配が急激に変化します。STRwrench アルゴリズムは、トルク/角度トレースとグラフの原点からトレースの実際の点まで引かれた直線との間の最大距離 (d) の点をブレークアウェイポイントとします。この距離はしきい値よりも大きく、より多くのサンプルに対して一貫している必要があります。
さらに、ブレークアウェイポイントより後のトレース部分の平均傾斜は、ブレークアウェイポイント前のトレースの部分における平均勾配の 60% 未満である必要があります。
これらの条件がすべて満たされると、テストは終了し、ブレークアウェイポイント/残留ポイントが検出されます。
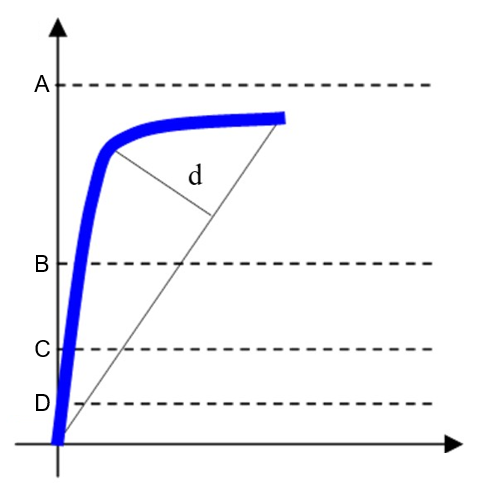
A | 最大トルク | B | 最小トルク |
C | 最終角度監視トルク | D | サイクル開始 |
d | トレースと直線間の最大距離。 | ||
推奨設定
サイクル開始 | smartHEAD の能力の 2% 以上の値を設定してください。 |
最終角度監視トルク | サイクル開始と最小トルクの間の値を設定します。 |
最小トルク | OK の結果を得るための、最小残留トルク値を設定します。 |
最大トルク | OK の結果を得るための、最大残留トルク値を設定します。 |
たとえば、80 N∙ m の smartHEAD を備えた STRwrench を使用して、50 N∙ m で締め付けられたボルトの残留ポイントを検出する場合、適切な設定は次のようになります:

A | 最大トルク | B | 最小トルク |
C | 最終角度監視トルク | D | サイクル開始 |









































