Algoritmo de detección del punto residual
Para detectar el punto residual de par/ángulo, el STRwrench utiliza un algoritmo que calcula el gradiente αt de la traza de par/ángulo mediante regresión lineal cada vez que se recoge una nueva muestra. A continuación, el algoritmo calcula la media de seis valores αt diferentes:

Este valor αpromedio se utiliza para identificar el punto residual.
Escenarios de aplicación del algoritmo
Escenario A
Cuando se acumula una alta fricción estática en la junta (por ejemplo, debido a la falta de lubricación), en cuanto el perno se mueve, el par disminuye y el par residual real es inferior al par máximo necesario para superar la fricción estática. En estos casos, el algoritmo de la STRwrench monitoriza el αpromedio: si αpromedio tiene un valor negativo, el algoritmo espera hasta que el αpromedio vuelva al valor positivo. El punto en el que αpromedio vuelve al valor positivo se considera el punto de par residual.

A | Par máximo | B | Par mínimo |
C | Par de monitorización del ángulo final | D | Inicio de ciclo |
Escenario B
Normalmente, durante la rotura hay un cambio rápido del gradiente de la función de par/ángulo cuando empieza a moverse el perno. El algoritmo de la STRwrench toma como punto de ruptura el punto de máxima distancia (d) entre la trayectoria de par/ángulo y la línea recta trazada desde el origen del gráfico hasta el punto real de la trayectoria. Esta distancia debe ser superior al umbral y debe ser constante para más muestras.
Además, la pendiente media de la parte de la trayectoria posterior al punto de ruptura debe ser inferior al 60 % de la pendiente media de la parte de la trayectoria anterior al punto de ruptura.
Si se cumplen todas estas condiciones, la prueba finaliza y se detecta el punto residual/rotura.
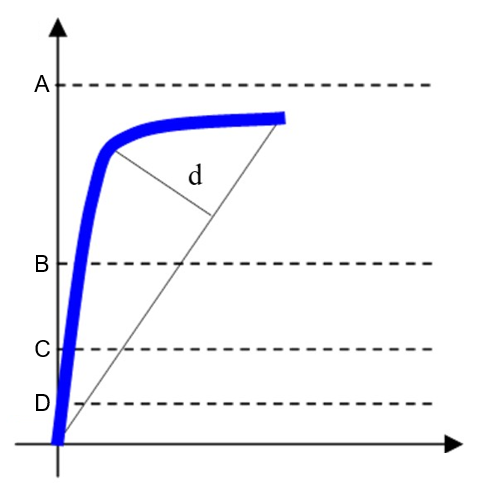
A | Par máximo | B | Par mínimo |
C | Par de monitorización del ángulo final | D | Inicio de ciclo |
d | Distancia máxima entre la trayectoria y la línea recta. | ||
Ajustes recomendados
Inicio de ciclo | Establezca un valor que sea ≥ 2 % de la capacidad de smartHEAD. |
Par de monitorización del ángulo final | Establezca un valor entre el Inicio de ciclo y el Par mínimo. |
Par mínimo | Establezca el valor de par residual mínimo para obtener un resultado OK. |
Par máximo | Establezca el valor de par residual máximo para obtener un resultado OK. |
Por ejemplo, un ajuste adecuado para detectar el punto residual en un perno apretado a 550 N m utilizando una STRwrench con un smartHEAD de 80 N m podría ser el siguiente:

A | Par máximo | B | Par mínimo |
C | Par de monitorización del ángulo final | D | Inicio de ciclo |









































