摩擦控制步骤
摩擦控制步骤是角度步骤的一个更智能的版本,它可以在旋入阶段测量平均扭矩(摩擦)。达到目标摩擦控制角度时完成的步骤。如果平均扭矩不在平均扭矩限值范围内,该步骤将失败。如果扭矩超过/低于最大/最小扭矩限值,拧紧仍将中止。
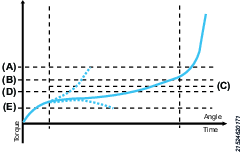
A | 最大扭矩 |
B | 最大平均扭矩 |
C | 平均扭矩 |
D | 最小平均扭矩 |
E | 最小扭矩 |
参数 | 描述 |
速度 | 工具速度可在有效范围内编程。 |
摩擦控制角度 | 成功完成此步骤应达到的角度。 |
方向 | 拧紧方向,顺时针或逆时针。对于普通拧紧,使用顺时针设置。 |
真空已启用 | 用于打开外部真空泵的数字输出。 |
快速变速 | 可在快速与慢速之间迅速切换。启用时将可以在更长的时间范围内对当前所控制工具进行更精确的扭矩估计。此设置作用于当前步骤与下一步骤的过渡阶段。 |
最小扭矩 (E) | 在此步骤中,扭矩不得低于设定的最小扭矩。如果扭矩低于最小扭矩,驱动装置将停止,而且控制器将显示错误消息。 |
最大扭矩 (A) | 在此步骤中,不得超过最大扭矩值。如果达到最大扭矩,工具将停止,而且控制器将显示错误消息。 |
最小平均扭矩 (D) | 步骤结束时,该步骤应具有的最小平均扭矩值。如果在步骤结束时未达到最小平均扭矩,拧紧将中止,结果为 NOK。 |
最大平均扭矩 (B) | 步骤结束时,该步骤应具有的最大平均扭矩值。如果在步骤结束时超过最大平均扭矩,拧紧将中止,结果为 NOK。 |
步骤启动延迟 | 从触发到工具启动的延迟。 |
最短步骤时间 | 设置步骤的最短时间。如果没有达到,控制器将显示错误消息。 |
最长步骤时间 | 设置步骤的最长时间。如果超过,控制器将显示错误消息。 |









































