Friction Control Step
The friction control step is a smarter version of the angle step that can measure the average torque (friction) during the rundown phase. The step is finished when the target friction control angle is reached. The step will fail if the average torque is not within the average torque limits. Tightening will still be aborted if torque goes above/below the max/min torque limits.
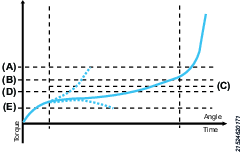
A | Max. torque |
B | Max. average torque |
C | Average torque |
D | Min. average torque |
E | Min. torque |
Parameter | Description |
Speed | The tool speed is programmable within the valid range. |
Friction control angle | The angle that shall be reached to successfully complete the step. |
Direction | Direction of the tightening, clockwise or counterclockwise. Use clockwise setting for normal tightening. |
Vacuum enabled | Digital output to switch on an external vacuum pump. |
Fast speed change | Makes it possible to shift fast between fast and slow speed. When enabled it will be possible to get a more accurate torque estimation for current controlled tools over a longer time frame. This applies in the transition of the current step and the next step. |
Min. torque (E) | The torque must not be below the set minimum torque during the step. If the torque drops below the min. torque the driver will stop and the controller will display an error message. |
Max. torque (A) | The maximum torque value must not be exceeded during this step. If the maximum torque is reached, the tool will stop and the controller will display an error message. |
Min. average torque (D) | Minimum average torque value the step shall have at the end of the step. If min. average torque is not reached at the end of the step the tightening will be aborted with a NOK result. |
Max. average torque (B) | Maximum average torque value the step shall have at the end of the step. If max. average torque is exceeded at the end of the step the tightening will be aborted with a NOK result. |
Step start delay | Delay from trigger to tool start. |
Min. step time | Setting a minimum time for the step. If not reached the controller will display an error message. |
Max. step time | Setting a maximum time for the step. If exceeded, the controller will display an error message. |









































