영역에서 공구 방향 제한 설정하기
이 설정을 사용하면 공구를 활성화 및 비활성화하는 기준으로 공구 방향(롤 및 피치축)을 사용할 수 있습니다. 이 방향 설정은 티칭 모드를 사용하여 수동으로 설정할 수 있습니다.
공구는 2개의 회전축만 측정할 수 있습니다. 센서 기술의 한계로 인해 지구의 중력 벡터(요축:yaw axis) 주변의 회전은 탐지할 수 없습니다.
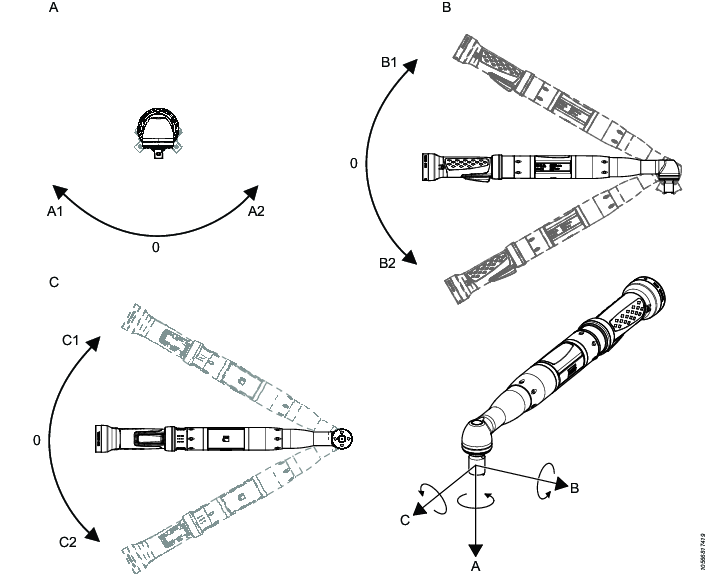
A | 롤 | B | 피치 |
C | 요 |
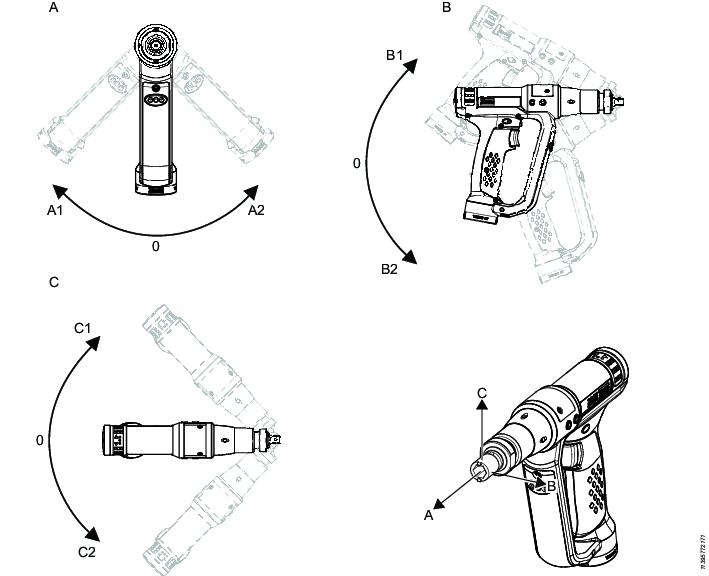
A | 롤 | B | 피치 |
C | 요 |
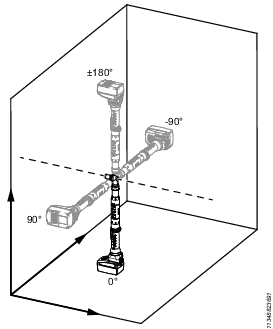
피치
공구의 소켓축과 수직 평면 간의 회전 각도입니다. 값: -90~+90° 사이
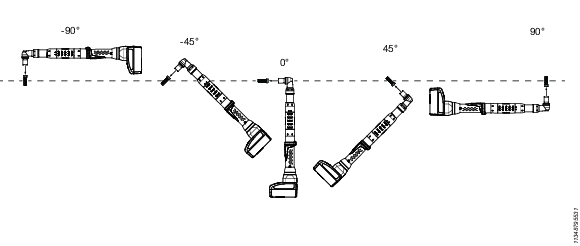
아래 비디오는 각도 공구의 피치의 예를 보여줍니다.
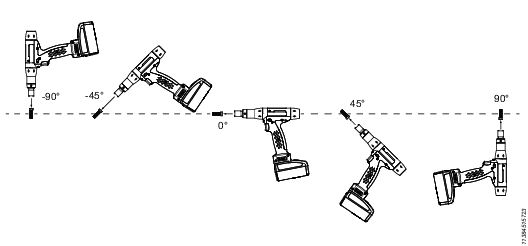
롤
공구의 소켓 중심 축을 기준으로 측정한 회전 각도입니다. 값: -180~+180° 사이
피치 ± 90°에서 롤 측정은 불가능합니다.
아래 비디오는 각도 공구의 롤의 예를 보여줍니다.
영역 편집 화면에서, 방향을 선택하세요.
방향 사용 확인란을 선택하면, 더 많은 옵션이 표시 됩니다.
수동 또는 방향 티칭 기능 사용을 선택하여 방향을 설정하세요.
방향 티칭을 선택하세요.
시간 지연을 눌러 지연 시간을 표시합니다. 옵션은 다음과 같습니다: 아니오(기본값), 5초, 10초, 또는 15초
정확한 방향으로 공구를 배치하고 교정 시작을 눌러주세요.
방향 설정을 조정하려면, 필요한 경우 방향을 수동으로 설정하는 방법과 동일한 절차를 따르십시오.
방향 - 롤을 선택하고, 값을 입력한 다음 확인을 선택하세요.
방향 - 피치를 선택하고, 값을 입력한 다음 확인을 선택하세요.
허용값 - 롤을 선택하고, 값을 입력한 다음 확인을 선택하세요. 롤에 대한 허용값은 ±30° 입니다.
허용값 - 피치를 선택하고, 값을 입력한 다음 확인을 선택하세요. 피치에 대한 허용값은 ±15° 입니다.









































