4단계 조임 전략 개요
속도, 토크 및 회전 각도에 대한 다양한 단계 및 곡선의 그래픽 표시는 시간이 지남에 따라 보여집니다.
그래픽 표시는 구성 설정과 매개변수 값의 의미를 설명하기 위해 문서에서 사용되고 있습니다. 그래프는 모든 GUI에서 사용되지 않습니다.
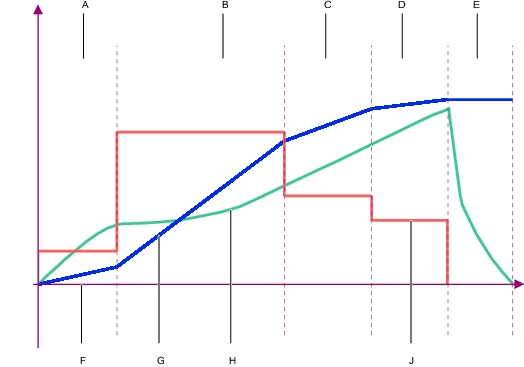
A | 시작 단계 |
B | 런다운 단계 |
C | 조임 단계의 최초 단계 |
D | 조임 단계의 최종 단계 |
E | 정지 단계 |
F | 속도 초과 시간 곡선 |
G | 토크 초과 시간 곡선 |
H | 각도 초과 시간 곡선 |
I | 시간 방향 |
각 단계는 토크, 각도, 시간 및 공구 속도에 관하여 구성됩니다. 각 단계에는 토크 또는 각도인 하나의 목표값이 있고 다른값을 모니터링합니다.
단계 | 기능 |
|---|---|
시작 | 목표 = 각도 이 단계는 스레드를 체결하고 조임이 이미 발생한 경우 감지하기 위해 사용됩니다. 시간, 각도 및 토크 한계를 모니터링할 수 있습니다. |
런다운 | 목표 = 토크 이 단계는 지정된 토크값으로 나사 또는 너트를 착촤점 레벨로 런다운하는 데 사용됩니다. 시간, 각도 및 토크 한계를 모니터링할 수 있습니다. |
조임 | 조임 단계는 다음과 같이 두 단계로 구분됨: 최초 조임 및 최종 조임. 최초 조임 목표 = 토크. 이 단계는 나사나 너트를 지정된 최초 목표 토크 레벨로 조이는 데 사용됩니다. 최종 조임 목표 = 각도 또는 토크. 이 단계는 최초 조임 목표에서 최종 목표 각도 또는 더 높은 최종 목표 토크로 조임을 계속하는 데 사용됩니다. 시간, 각도 및 토크 한계를 모니터링할 수 있습니다. |
중지 | 정지 단계는 조임을 종료해 소켓을 풀 수 있게 합니다. |









































