4ステップ戦略の概要
時間経過と共に見られる速度、トルク、回転角度に対する異なるステップおよび曲線のグラフ表示。
グラフィック表示は、構成設定とパラメーター値の意味を説明する文書で使用します。グラフは、GUI では使用されません。
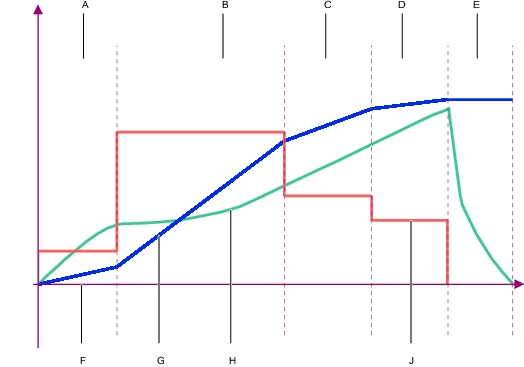
A | 開始ステップ |
B | ランダウンステップ |
C | 締め付けステップの最初のステップ |
D | 締め付けステップの最後のステップ |
E | 停止ステップ |
F | 対時間速度の曲線 |
G | 対時間トルクの曲線 |
H | 対時間角度の曲線 |
I | 時間方向 |
各ステップは、トルク、角度、時間およびツール速度に対して構成されます。各ステップは、トルクまたは角度のいずれかの一つのターゲット値をもち、他の値を監視します。
ステップ | 機能 |
|---|---|
挿入位置 | 目標 = 角度 ステップは、スレッドをかみ合わせ、締め付けがすでに行われているかを検出するために使用します。 時間、角度およびトルクの制限値を監視できます。 |
ランダウン | 目標 = トルク このステップを使用して、定義されたトルク値で、ネジまたはナットを着座レベルまでランダウンします。 時間、角度およびトルクの制限値を監視できます。 |
締め付け | 締め付けステップは 2 つのステップに分かれます。最初の締め付けと最終の締め付け。 最初の締め付け目標 = トルク。このステップを使用して、定義された最初のターゲットトルクレベルまでネジやナットを締め付けます。 最終締め付け目標 = 角度またはトルク段階を使用して、最初の締め付けターゲットから最終のターゲット角度またはより高い最終ターゲットトルクまでの締め付けを継続します。 時間、角度およびトルクの制限値を監視できます。 |
停止 | ソケットを離すことができるよう停止ステップで締め付けを終了します。 |









































