Etapa de aperto
Essa seção lista as etapas de aperto válidas para os Controladores StepSync PF6000 e PF6.
Parâmetros Gerais
Nome
É possível renomear cada etapa, se necessário.
Direção rotacional
Cada uma da etapas de aperto pode funcionar tanto em avanço, para realizar um aperto como em reverso, para desapertar um pouco o parafuso. As setas indicam esses sentidos. Muitas das etapas de aperto apresentam um sentido embutido em código para avanço, por exemplo, Apertar conforme o ângulo ou Apertar conforme o torque. Etapas como Desapertar conforme o ângulo ou Desapertar conforme o Torque têm o seu sentido automaticamente definido como reverso.
Categoria da etapa
Para cada etapa, há uma opção para escolher uma categoria de etapa. Ao se selecionar categoria de etapa, os apertos NOK serão listados na visualização de resultados do evento juntamente com os respectivos status detalhados com as informações correspondentes de erro de múltiplas etapas. Se não for realizada uma seleção, o status detalhado será definido como "erro de múltiplas etapas sem classificação". O respectivo status detalhado pode ser personalizado.
Janela de ângulo
Uma junta é considerada Rígida se os parafusos forem apertados até o torque integral e giram 30 graus (ou menos) após serem apertados até o seu ponto de encosto. Uma junta Flexível gira 720 graus ou mais após ter sido apertada até o seu ponto de encosto. O parâmetro de rigidez define a Janela de ângulo para o cálculo do gradiente. Quanto mais rígida a junta menor a janela de ângulo.
Rampa de velocidade/ Aceleração
Para a maioria das etapas é possível especificar como deve ser atingida a aceleração até a velocidade-alvo. São possíveis três definições diferentes: Rígida, Flexível e Manual. A aceleração definida será utilizada sempre que uma etapa for iniciada. Independentemente da ferramenta já estar funcionando ou não na velocidade do início da etapa, a rampa será utilizada para acelerar até a velocidade-alvo da etapa. Esse será o caso mesmo que a velocidade no início da etapa seja mais alta ou mais baixa que a velocidade-alvo.
Modo Rampa de velocidade - Rígida e Flexível :
Aceleração | Tipo da rampa de velocidade utilizada |
|---|---|
Rígida | 2000 rpm/s (Rampa de velocidade entre 1000 e 10000 rpm/s é uma Aceleração rígida.) |
Flexível | 500 rpm/s (Rampa de velocidade entre 200 e 1000 rpm/s é uma Aceleração flexível.) |
Modo Rampa de velocidade - Manual :
Parâmetro | Valor padrão | Limite mínimo | Limite máximo |
|---|---|---|---|
Speed (Velocidade) | 60 rpm | Deve ser > 0 | Deve ser ≤ Velocidade máxima da ferramenta |
Aceleração | 500 rpm/s | Deve ser > 0 | Deve ser ≤ Aceleração máxima da ferramenta |
Utilizando mudanças de velocidade
Pode-se definir de 1 a 5 ângulos iniciais ou torque iniciais durante uma etapa em que a velocidade mudará.
Em uma etapa, todos os disparos de mudança de velocidade se baseiam na mesma propriedade, seja torque ou ângulo, que não podem ser misturadas em uma única etapa.
Para adicionar uma mudança de velocidade:
Na área de Configuração de uma etapa que pode ter mudanças de velocidade, clique em Adicionar mudança de velocidade e escolha um intervalo de ângulo ou um intervalo de torque. Os campos Ângulo/Torque de mudança de velocidade se abrem.
Adicione valores de acordo com a tabela abaixo.
Parâmetro | Description (Descrição) |
|---|---|
Disparo de Ângulo/Torque | Deve ser > 0. |
Speed (Velocidade) | Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida ou flexível. |
Os Disparos de torque e Disparos de ângulo devem ser memores que o alvo da etapa, dependendo do tipo da etapa e do tipo de disparo.
O Disparo de torque e Velocidade de torque também são validados em relação ao Torque máx. e à Velocidade máx. da ferramenta. Uma luz de sinalização de alerta ou erro ocorre sempre que as definições de Mudança de velocidade excedam tanto os valores máx. da ferramenta ou valores máx. da etapa.
É possível enviar as definições por Push ao controlador quando um programa de aperto apresenta um alerta, mas não quando um programa de aperto apresenta uma luz de sinalização de erro (falha).
Controlando um comportamento de frenagem (Parada ergonômica/Inércia)
O comportamento de frenagem de um programa de aperto pode ser controlado em dois possíveis locais no programa: em uma etapa que precede uma reversão de sentido do aperto e/ou na etapa final do programa de aperto. Em outros locais no programa de múltiplas etapas, os parâmetros de frenagem não estarão disponíveis nas definições gerais da etapa. A frenagem pode ser definida tanto como Ergo stop ou Inércia. Inércia freará totalmente a ferramenta, enquanto Ergo stop permitirá uma redução mais ergonômica do aperto.
Para definir o tipo de frenagem, vá para definições da etapa e defina a lista suspensa Configuração de freio como Parada ergonômica ou Inércia. Inércia não apresenta parâmetros adicionais.
Parâmetros da Parada ergonômica
Parâmetro | Description (Descrição) |
|---|---|
Freio adaptável | Defina o Freio adaptável em Ativo ou Desativado. |
Tempo de rampa | Somente disponível quando Freio adaptável é definido como Desativado. Insira o tempo em ms. |
Lista de cada etapa
C - Embreagem
Essa etapa funcionará a ferramenta na Velocidade programada no sentido do avanço até que a Embreagem seja liberada. Quando a ferramenta relatar a liberação da Embreagem, a etapa encerrará com o status de OK.
Um programa de aperto que utiliza a etapa Embreagem não pode ter outra etapa designada.
Essa etapa é válida somente para as ferramentas com Embreagem, BCV-RE e BCP-RE.
Parâmetro | Description (Descrição) |
|---|---|
Controle de Velocidade | Velocidade Única ou Duas Velocidades |
Velocidade Final | Define a velocidade final do programa [rpm] |
Rampa de Velocidade | Chave onde a rampa de velocidade pode ser escolhida [Rígida, Flexível] |
Reapertar | Detecção de reaperto definida em Ativada ou Desativada |
Ângulo do reaperto | Define o ângulo de reaperto [°] |
CL - Desaperto da embreagem
Essa etapa funcionará a ferramenta na velocidade programada no sentido reverso até que o acionador da ferramenta seja liberado.
O programa de desaperto que utiliza a etapa Embreagem não pode ter outra etapa designada.
Essa etapa é válida somente para as ferramentas com Embreagem, BCV-RE e BCP-RE.
Parâmetro | Description (Descrição) |
|---|---|
Final | Define a velocidade do programa [rpm] |
W - Aguardar
Nesta etapa a ferramenta aguarda a quantidade especificada de tempo. A ferramenta não gira enquanto aguarda.
A ferramenta aguarda por um tempo especificado. Se a posição de retenção for definida em Ativo a ferramenta retém a posição durante o Tempo de espera.
SR - Liberação de soquete
Essa etapa funciona a ferramenta com a velocidade n no sentido de recuo até ser alcançado o ângulo alvo. O ângulo-alvo é medido a partir do início da etapa.
Essa etapa é permitida somente para ser utilizada como a última etapa no caminho do aperto de um programa de aperto de múltiplas etapas. Entretanto, é possível adicionar um ponto de sincronização após essa etapa.
Parâmetro | Description (Descrição) |
|---|---|
Ângulo-alvo | O ângulo-alvo. Padrão: 3º , deve ser > 0 |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
DI - Executar até a entrada digital
Essa etapa funciona a ferramenta na direção definida pelo parâmetro Direção, até que a entrada especificada pela Entrada digital fique acima ou abaixo, a depender do valor da Condição de parada.
Essa etapa não está disponível para ferramentas STB.
Parâmetro | Description (Descrição) |
|---|---|
Sentido | Avanço ou Recuo |
Entrada digital | Uma das seguintes entradas digitais no controlador podem ser selecionadas:
|
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Condição de parada |
|
Velocidade (rpm) | Padrão: 60 rpm. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Disponível se o Tipo de rampa de velocidade for Manual. Padrão: 500 rpm/s. |
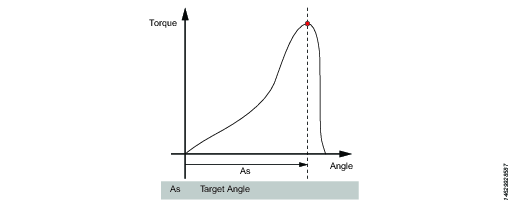
A – Apertar conforme o ângulo / Desapertar conforme o ângulo
A – Apertar conforme o ângulo
Essa etapa funciona a ferramenta até ser atingido o ângulo-alvo. O ângulo-alvo é medido a partir do início da etapa.
A – Desapertar conforme o ângulo
Essa etapa funciona a ferramenta com a velocidade n no sentido de recuo até ser alcançado o ângulo alvo. O tempo-alvo é medido a partir do início da etapa.
Parâmetros
Parâmetro | Description (Descrição) |
|---|---|
Ângulo-alvo | O ângulo-alvo. Deve ser > 0. |
Speed (Velocidade) | Padrão: 60 rpm. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
TrR - Desapertar até liberar acionador
Essa etapa é válida somente para controladores PF6000.
Essa etapa opera na direção de recuo até o acionador da ferramenta ser liberado (desapertar). Pode ser utilizado somente como uma última etapa em um programa.
Em ferramentas STB, essa etapa se aplica somente para programas de desaperto.
Parâmetro | Description (Descrição) |
|---|---|
Speed (Velocidade) | Valor numérico da velocidade de rotação, em rpm. |
Tipo da rampa de velocidade | Lista de opções em que a rampa de velocidade pode ser escolhida [Rígida, Flexível, Manual] |
TTTR - Apertar até liberar acionador
Essa etapa funciona até o acionador da ferramenta ser liberado (apertar). Pode ser utilizado somente como uma última etapa em um programa de aperto.
Parâmetro | Description (Descrição) |
|---|---|
Speed (Velocidade) | Valor numérico da velocidade de rotação, em rpm. |
Tipo da rampa de velocidade | Lista de opções em que a rampa de velocidade pode ser escolhida [Rígida, Flexível, Manual] |
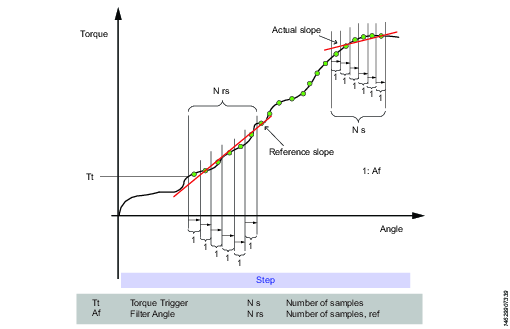
Apertar conforme o ponto de escoamento, método 2 (YM2)
Essa etapa é válida somente para controladores PF6 Stepsync, não sendo válida para controladores PF6000.
Essa etapa funciona a ferramenta com a velocidade especificada no sentido do avanço até ser detectado o ponto de escoamento.
Buscar os inícios dos pontos de escoamento quando o torque alcançar Tt. A média do torque é calculada em graus Af. Esse procedimento é repetido N rs vezes.
A inclinação de referência é calculada por regressão linear ao longo dos pontos N rs . Depois disso, novos valores médios são continuamente calculados com os graus A f .
A inclinação real é calculada por regressão linear com os últimos pontos médios de N s . O ponto de escoamento é alcançado quando a inclinação é menor que a Py % da inclinação de referência.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo de filtro | Padrão: 1. Deve ser > 0. |
Número de amostras | Padrão: 6. Deve ser >=4. |
Número de amostras, referência | Padrão: 6. Deve ser >=4. |
Porcentagem do limite de escoamento | Padrão: 90%. Deve ser >20%. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
T - Apertar conforme o Torque / Desapertar conforme o Torque
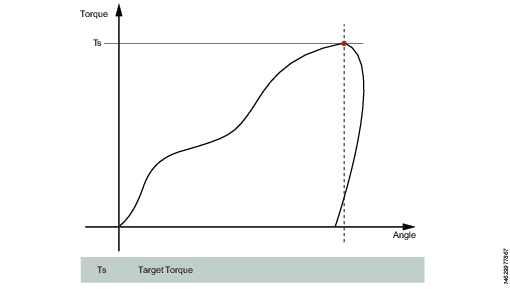
T – Apertar conforme o torque
Essa etapa funciona a ferramenta com a velocidade programada no sentido de avanço até ser alcançado o torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
T – Desapertar conforme o torque
Essa etapa funciona a ferramenta com a velocidade no sentido de recuo. Para que a etapa esteja ativa, o torque deve primeiramente exceder 110 % do torque-alvo. O torque-alvo deve ser definido como um valor positivo. Após atingir o torque-alvo, a etapa é executada até que o torque caia abaixo do torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
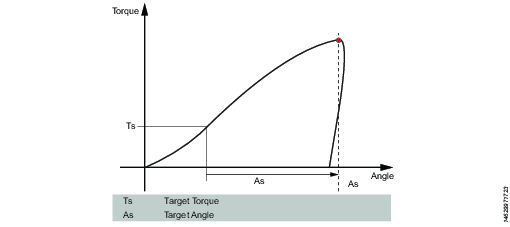
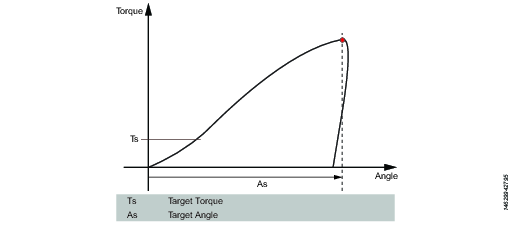
Apertar conforme o torque + ângulo (T+A)
Essa etapa funciona a ferramenta até ser atingido o torque-alvo. A partir desse ponto, ela continua a funcionar com um ângulo-alvo adicional.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Ângulo-alvo | O ângulo-alvo. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Apertar conforme o torque ou ângulo (T|A)
Esta etapa funciona a ferramenta com a velocidade n na direção avançar até que o primeiro torque-alvo ou ângulo-alvo seja atingido. As medições de torque e de ângulo começam no início da etapa.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo-alvo | Deve ser > 0. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Apertar conforme o torque e ângulo (T&A)
A ferramenta opera na velocidade especificada na direção Avançar até que tanto o torque-alvo quanto o ângulo-alvo sejam atingidos. O torque-alvo e o ângulo-alvo devem ser definidos como > 0.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo-alvo | Padrão: 0. Deve ser > 0. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
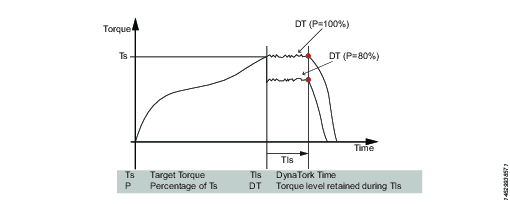
Apertar conforme o DynaTork (DT)
Essa etapa funciona a ferramenta com velocidade n na direção Avançar até que o Torque-alvo seja atingido. A ferramenta reterá a constante de corrente na Percentagem do DynaTork do Torque-alvo durante o Tempo do DynaTork.
Para evitar superaquecer a ferramenta, é altamente recomendável nunca funcionar o DynaTork acima de 40% do torque máximo da ferramenta.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Tempo no DynaTork | O tempo DynaTork estará ativo. |
Porcentagem no DynaTork | A porcentagem do Torque alvo. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Velocidade (rpm) | Padrão: 60 rpm. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
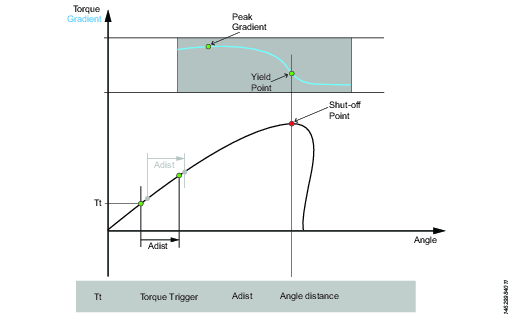
Apertar conforme o ponto de escoamento (Y)
Essa etapa não está disponível para ferramentas STB.
Essa estratégia funciona a ferramenta com a velocidade no sentido do avanço até ser detectado o ponto de escoamento. O ponto de escoamento é encontrado monitorando-se o gradiente do torque a partir do ponto em que o torque supera o nível do Torque de acionamento , calculado com base em medições da distância de Torque e Angular. O parâmetro distância angular é definido de acordo com a rigidez especificada da junta.
Defina a Janela de ângulo gradiente (para uma junta rígida, para uma junta flexível ou para definir manualmente anela de Ângulo). Se for selecionado Manual , a Janela de ângulo deve ser definida. Uma junta é considerada Rígida se os parafusos forem apertados até o torque integral e girarem 30 graus (ou menos) após serem apertados até o seu ponto de encosto. Uma junta Flexível gira 720 graus ou mais após ter sido apertada até o seu ponto de encosto. O parâmetro de rigidez define a Janela de ângulo para o cálculo do gradiente. Quanto mais rígida a junta menor a janela de ângulo.
Parâmetro | Description (Descrição) |
|---|---|
Gradient Angle Window (Janela Angular - Gradiente) | Especifica a Angle Window (Janela Angular):
|
Angle Window (Janela Angular) | Disponível quando Gradient Angle Window (Janela Angular - Gradiente) for definido em Manual. Deve ser > 0 e <=100. |
Trigger Torque (Torque de Acionamento) | A medição do ângulo começa neste acionamento. Deve ser >= 0 e < Torque máx. da ferramenta. |
Damping (Amortecimento) | Frequência com que o gradiente é calculado. Deve ser > 0 e < 100 e < Angle Window (Janela angular). |
Yield Point Percentage (Porcentagem do Limite de Escoamento) | Deve ser >= 20 % |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Torque Filter Type (Tipo de Filtro de Torque) | O tipo do filtro:
|
Cut-off Frequency (Frequência de Corte) | Precisa ser especificado quando Torque Filter Type (Tipo de Filtro de Torque) é definido como Low pass (Passa baixo):
|
Number of Samples (Número de Amostras) | Precisa ser especificado quando Torque Filter Type (Tipo de Filtro de Torque) é definido como Sliding Average (Média Móvel):
|
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
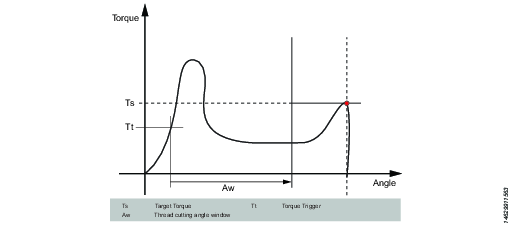
ThCT - Abertura de rosca conforme o torque
A função Abertura de rosca conforme o torque ativa o aperto onde o torque de Rundown exigido é maior que habilita o aperto onde o torque de execução necessário é maior do que o torque de Rundown concluído, por exemplo, ao apertar camadas finas de metal utilizando parafusos autorroscantes (ou autoatarraxantes). A ferramenta funciona no sentido do avanço até ser atingido o Thread Cutting Angle (Aw) (Ângulo de Abertura de Rosca (Aw)). A janela Ângulo de abertura de rosca é medida a partir do ponto em que o torque ultrapassa o Torque de acionamento de abertura de rosca (Ttc) da primeira vez. A partir do ponto em que o Ângulo de abertura de rosca é atingido, a etapa continua a ser executada até ser alcançado o Torque-alvo .
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Janela de ângulo de abertura de rosca | Padrão: 0. Deve ser > 0. |
Trigger Torque (Torque de Acionamento) | A medição do ângulo começa neste acionamento. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
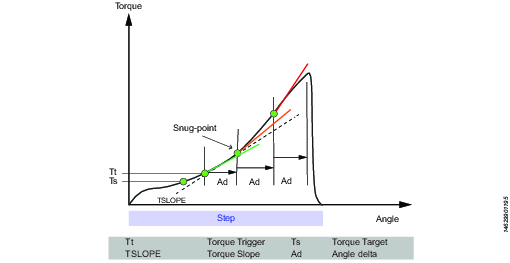
RD – Rundown
Essa etapa não está disponível para ferramentas STB.
A etapa de Rundown faz parte do aperto a partir do ponto em que o parafuso entra na rosca até pouco antes da cabeça do parafuso tocar a superfície subjacente e atingir o ponto de encosto. O torque necessário durante um Rundown não contribui com nenhuma força de fixação.
Esta etapa funciona a ferramenta com a velocidade no sentido avançar, e dependendo do Tipo de Rundown, torque ou encosto, o comportamento da etapa é o seguinte:
Tipo de Rundown: Até o Torque: A etapa para quando o torque-alvo especificado é encontrado.
Tipo de Rundown: Até o aperto: O cálculo do gradiente do encosto começa no nível Tt do acionador de torque especificado. Se nenhum acionador de torque for definido, o cálculo de gradiente é iniciado no começo da etapa.
O cálculo da rampa é feito entre dois pontos angulares afastados em Ad graus e é feito da seguinte forma: (Tn – Tn-1) / (An – An-1) e, assim que duas rampas consecutivas forem maiores do que TSLOPE o ponto de aperto é encontrado.
Parâmetro | Description (Descrição) |
|---|---|
Tipo de Rundown | To Torque (Até o Torque) ou To Snug (Até o Aperto). |
Target torque (Torque-alvo) | Padrão: “não definido”. Deve ser > 0. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Trigger Torque (Torque de Acionamento) | Se o Tipo de Rundown for To Snug (Até o Aperto), o campo Trigger torque (Torque de acionamento) é exibido. Padrão: “não definido”. Deve ser > 0. |
Ângulo delta | Se o Tipo de Rundown for Até o aperto, o campo Ângulo Delta é exibido. Padrão: "0". Deve ser > 0. |
Taxa de Torque | Se o Tipo de Rundown for Até o aperto, o campo Taxa de Torque é exibido. Padrão: "0". Deve ser > 0. |
Freio (Válido somente para controladores PF6 Flex e PF6 Stepsync). | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Engatar (E)
Essa etapa não está disponível para ferramentas STB.
Essa etapa funciona a ferramenta em ambos os sentidos até o soquete engatar no parafuso. A etapa continua até ser atingido o Torque-alvo ou o Ângulo-alvo, desde que Continuar se não Engatado estiver definido como Sim. Se o Ângulo-alvo é alcançado em qualquer sentido, o sentido será invertido. Limite as interações de busca inserindo Número máx. de tentativas de engate. Se o Torque-alvo for atingido em qualquer sentido, a etapa finalizará com o status OK.
Ext - Resultado Externo
Resultado externo é uma estratégia utilizada quando um aperto OK é indicado por um sinal digital externo (e não por valores de torque ou ângulo medidos durante o aperto). Esse sinal externo pode ser fornecido por qualquer meio que possa fornecer um sinal digital para o Power Focus 6000 (p. ex. por meio do barramento E/S).
Quando o sinal é enviado, a visualização de resultado (dados registrados) exibirá o valor do Parâmetro-alvo fornecido no programa de aperto (valor de torque, valor de ângulo ou cadeia de caracteres de texto especificados). Esses valores (torque e ângulo) não representam os valores reais, são apenas textos inseridos.
Parâmetro | Description (Descrição) |
|---|---|
Torque <Torque-alvo> | Valor numérico do valor do torque-alvo desejado exibido. O sinal pode, por exemplo, vir de um Torquímetro de estalo e exibir <Torque-alvo>. |
Ângulo <Ângulo-alvo> | Valor numérico do valor do ângulo-alvo desejado exibido. O sinal pode, por exemplo, vir de um Torquímetro de estalo e exibir <Ângulo-alvo>. |
Texto | Cadeia de caracteres alfanuméricos para o texto desejado exibido. Por exemplo: "Óleo trocado". |
Torquímetro mecatrônico MWR
Torquímetro mecatrônico é uma etapa especializada que pode ser utilizada somente em conjunto com um Torquímetro mecatrônico (MWR).
Essa etapa não pode ser utilizada em conjunto com outras etapas. Nenhuma restrição pode ser utilizada nessa etapa. Por padrão, a etapa apresenta três monitores: Pico de torque, Ângulo e Clicar.
Parâmetro | Description (Descrição) |
|---|---|
Limite de desaperto | Valor numérico para torque negativo (ou seja, torque no sentido do desaperto no ponto em que o resultado de aperto é marcado como NOK (Sentido falso de aperto (desapertar)); em Nm. |
Tamanho da ferramenta | Valor numérico do comprimento específico da ferramenta com acessório de extremidade instalada no MWR-TA; em mm. |
Curvatura da ferramenta | Valor numérico da ferramenta com acessório de extremidade instalada no MWR-TA; em °/Nm. |
Janela de ângulo de reaperto | Valor numérico do ângulo para determinar se o parafuso já foi apertado se o torque for atingido; em °. |
Máx. taxa angular | Valor numérico da máx. taxa em que o parafuso pode ser apertado; em °/s. |
WP - Produção da ferramenta
Estratégia usada para o teste de qualidade do aperto realizado com uma STwrench.
Parâmetro | Description (Descrição) |
|---|---|
Estratégia de controle | O tipo de etapa da Produção da ferramenta pode ser configurado com as seguintes estratégias de controle.
|
Com base na estratégia de controle selecionada, uma combinação de alguns dos parâmetros listados abaixo será exibida.
Parâmetros | Description (Descrição) |
|---|---|
Torque-alvo | Define o torque-alvo da etapa de aperto. |
Medir o torque em | Especifica onde o torque será medido. Escolha entre Pico de torque ou Pico de ângulo.
|
Limite para pesquisa de ângulo | Esse é uma compensação usada para definir o valor do resultado de torque para um aperto. Medir torque em deve ser definido para Pico de ângulo para que este parâmetro esteja disponível. |
Tempo de incremento | Valor numérico para tempo de incremento cujo padrão é 5000 ms. Permite ao operador liberar o torque por um tempo e recarregar durante a operação de aperto. Se Ratchet time (Tempo de incremento) for excedido, o resultado do aperto será marcado como NOK com o motivo "Tightening timeout (Tempo-limite de aperto". |
Tempo do ciclo final | Valor numérico em ms para indicar o fim do tempo de ciclo. Aplicado quando o torque atinge um valor abaixo do Rundown concluído |
Torque correction coefficient (Coeficiente de correção de torque) | O parâmetro é usado para corrigir a leitura do torque, ao usar uma extensão ou multiplicador de torque em uma ferramenta. O valor-padrão é 1. |
Angle correction (Correção do ângulo) | O parâmetro é usado para corrigir a leitura do ângulo, ao usar uma extensão ou multiplicador de torque em uma ferramenta. O valor-padrão é 0. |
Target Angle (Ângulo-alvo) | Define o ângulo-alvo da etapa de aperto. |
Rehit detection (Detecção de reaperto) | On Ativado) ou Off (Desativado). A detecção de reaperto (Rehit) pode ser usada para determinar quando um aperto é um reaperto (Rehit) com base na definição de limite de ângulo. Angle limit for rehit (Limite de ângulo para reaperto) é habilitado se Rehit direction (Sentido do reaperto) for definido como On (Ativado). |
Coeficiente do declive linear | O coeficiente de declive linear caracteriza a rigidez da junta na porção linear da curva, como declive de torque/ângulo na unidade de medida Nm/Deg. |
Compensar valor | Escolha entre Torque médio e Pico de torque. O valor de Compensação especifica como o PVT será calculado. Torque médio - O PVT será baseado em uma média calculada usando o seguinte:
Pico de torque - O PVT será baseado no valor de pico medido antes da detecção do aperto. |
Monitoramento de atraso | O cálculo de PVT não iniciará antes que essa janela tenha passado. Inicia na inicialização do aperto. |
Intervalo do PVT | Define em quantos graus a janela de PVT deve ser calculada. Inicia a partir do ponto de distância do PVT. |
Distância do PVT | Define a quantos graus antes do aperto o sistema deve iniciar a janela PVT. |
Prevailing torque min (Torque prevalente mín.) | Torque prevalente mínimo. |
Prevailing torque max (Torque prevalente máx.) | Torque prevalente - limite máximo |
WQ - Qualidade da Chave
Estratégia usada para testar a qualidade dos apertos realizados com uma STwrench.
Parâmetro | Description (Descrição) |
|---|---|
Estratégia de controle | A estratégia da Qualidade da ferramenta pode ser configurado com as seguintes estratégias de controle.
|
Com base na estratégia de controle selecionada, uma combinação de alguns dos parâmetros listados abaixo será exibida.
Parâmetros | Description (Descrição) |
|---|---|
Tempo de incremento | Valor numérico para tempo de incremento cujo padrão é 5000 ms. Permite ao operador liberar o torque por um tempo e recarregar durante a operação de aperto. Se Ratchet time (Tempo de incremento) for excedido, o resultado do aperto será marcado como NOK com o motivo "Tightening timeout (Tempo-limite de aperto". |
Torque correction coefficient (Coeficiente de correção de torque) | O parâmetro é usado para corrigir a leitura do torque, ao usar uma extensão ou multiplicador de torque em uma ferramenta. O valor-padrão é 1. |
Angle correction (Correção do ângulo) | O parâmetro é usado para corrigir a leitura do ângulo, ao usar uma extensão ou multiplicador de torque em uma ferramenta. O valor-padrão é 0. |
Target Angle (Ângulo-alvo) | Define o ângulo-alvo da etapa de aperto. |
Rehit detection (Detecção de reaperto) | On (Ativado) ou Off (Desativado). A detecção de reaperto (Rehit) pode ser usada para determinar quando um aperto é um reaperto (Rehit) com base na definição de limite de ângulo. Angle limit for rehit (Limite de ângulo para reaperto) é habilitado se Rehit direction (Sentido do reaperto) for definido como On (Ativado). |
Coeficiente do declive linear | O coeficiente de declive linear caracteriza a rigidez da junta na porção linear da curva, como declive de torque/ângulo na unidade de medida Nm/Deg. |
TP - Tensor Pulse
Antes de usar a etapa de aperto do Tensor Pulse, é obrigatório que o tipo de licença a seguir seja instalado no controlador:
Low Reaction Strategies (Estratégias de Baixa Reação)
Tensor Pulse somente está disponível para as ferramentas a seguir: ETV-STR61-100-13, ETV-STR61-70-13, ETV-STR61-50-10.
Essa etapa gera pulsos de aperto no sentido de avanço, até ser atingido o torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Torque Target - Ts (Alvo de Torque - Ts) | Torque Target (Alvo de torque) deve ir de 0 até o torque máximo da ferramenta. |
Pulse Energy - Pe ((Energia de pulso - Pe) | Pulse Energy (Energia de Pulso) é usado para controlar o valor da energia/corrente em cada pulso. Pulse Energy (Energia de Pulso) deve ir de 0 a 100%. |
Reaction Force Tuning Factor (Fator de Regulagem da Força de Reação) | O Fator de regulagem da força de reação é usado para regular a força de reação ao executar a etapa Tensor Pulse. O Fator de regulagem da força de reação deve ir de 0 até 100%. |









































