Etapa de aperto
Apertar/Desapertar conforme o ângulo (A)
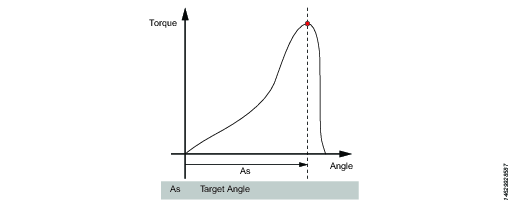
A – Apertar conforme o ângulo
Essa etapa funciona a ferramenta até ser atingido o ângulo-alvo. O tempo-alvo é medido a partir do início da etapa.
A – Desapertar conforme o ângulo
Essa etapa funciona a ferramenta com a velocidade n no sentido de recuo até ser alcançado o ângulo alvo. O tempo-alvo é medido a partir do início da etapa.
Parâmetros
Parâmetro | Description (Descrição) |
|---|---|
Ângulo-alvo | O ângulo-alvo. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
T – Apertar/Desapertar conforme o Torque
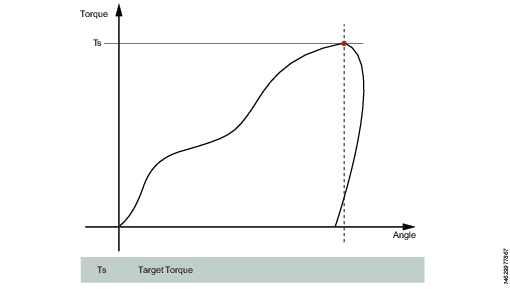
T – Apertar conforme o torque
Essa etapa funciona a ferramenta com a velocidade programada no sentido de avanço até ser alcançado o torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
T – Desapertar conforme o torque
Essa etapa funciona a ferramenta com a velocidade no sentido de recuo. Para que a etapa esteja ativa, o torque deve primeiramente exceder 110 % do torque-alvo. O torque-alvo deve ser definido como um valor positivo. Após atingir o torque-alvo, a etapa é executada até que o torque caia abaixo do torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Parar no primeiro torque | A etapa é executada até o torque passar o torque-alvo. O torque-alvo deve ser definido como um valor positivo. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
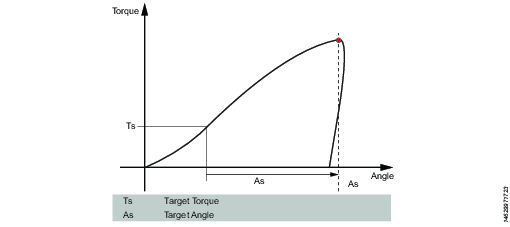
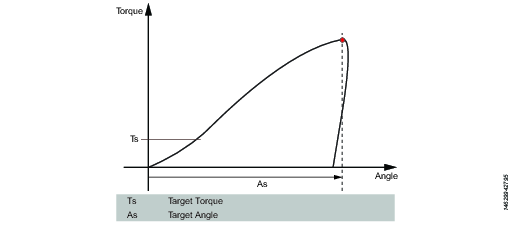
T+A – Aperto conforme o torque + ângulo
Essa etapa funciona a ferramenta até ser atingido o torque-alvo. A partir desse ponto, ela continua a funcionar com um ângulo-alvo adicional.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Ângulo-alvo | O ângulo-alvo. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
DI - Executar até a entrada digital
Essa etapa funciona a ferramenta na direção definida pelo parâmetro Direção, até que a entrada especificada pela Entrada digital fique acima ou abaixo, a depender do valor da Condição de parada.
Parâmetro | Description (Descrição) |
|---|---|
Sentido | Avanço ou Recuo |
Entrada digital | Uma das seguintes entradas digitais no controlador podem ser selecionadas:
|
Condição de parada |
|
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Velocidade (rpm) | Padrão: 60 rpm. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Disponível se o Tipo de rampa de velocidade for Manual. Padrão: 500 rpm/s. |
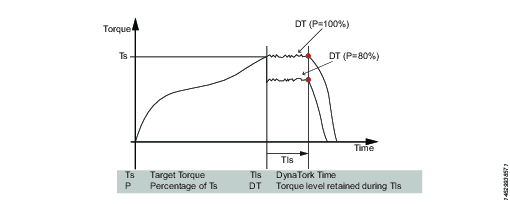
Apertar conforme o DynaTork (DT)
Essa etapa funciona a ferramenta com velocidade n na direção Avançar até que o Torque-alvo seja atingido. A ferramenta reterá a constante de corrente na Percentagem do DynaTork do Torque-alvo durante o Tempo do DynaTork.
Para evitar superaquecer a ferramenta, é altamente recomendável nunca funcionar o DynaTork acima de 40% do torque máximo da ferramenta.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | O torque-alvo. Deve ser > 0. |
Tempo no DynaTork | O tempo DynaTork estará ativo. |
Porcentagem no DynaTork | A porcentagem do Torque alvo. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Velocidade (rpm) | Padrão: 60 rpm. |
Aguardar (W)
Nesta etapa a ferramenta aguarda a quantidade especificada de tempo. A ferramenta não gira enquanto aguarda.
A configuração da etapa anterior à etapa Aguardar deve ter a definição Frear definida para Ativa, ou seja, a etapa Aguardar deve começar com a ferramenta parada.
Parâmetro | Description (Descrição) |
|---|---|
Tempo de espera | Número de segundos em que a ferramenta ficará parada. |
Posição Segurar | On (Ativado) ou Off (Desativado). Se estiver em Ativo, a ferramenta retém a posição durante o Tempo-alvo. |
Liberação do Soquete (SR)
Essa etapa funciona a ferramenta com a velocidade n no sentido de recuo até ser alcançado o ângulo alvo. O tempo-alvo é medido a partir do início da etapa.
Essa etapa é permitida somente para ser utilizada como a última etapa no caminho do aperto de um programa de aperto de múltiplas etapas. Entretanto, é possível adicionar um ponto de sincronização após essa etapa.
Parâmetro | Description (Descrição) |
|---|---|
Ângulo-alvo | O ângulo-alvo. Padrão: 3º , deve ser > 0 |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Speed (Velocidade) | Padrão: 60 rpm. |
Apertar conforme o torque ou ângulo (T|A)
Esta etapa funciona a ferramenta com a velocidade n na direção avançar até que o primeiro torque-alvo ou ângulo-alvo seja atingido. As medições de torque e de ângulo começam no início da etapa.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo-alvo | Deve ser > 0. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
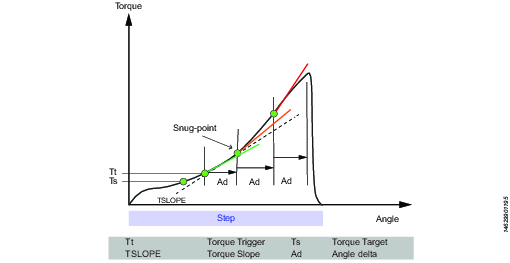
Rundown (RD)
Esta etapa funciona a ferramenta com a velocidade no sentido avançar, e dependendo do Tipo de Rundown, torque ou encosto, o comportamento da etapa é o seguinte:
Tipo de Rundown: Até o Torque: A etapa para quando o torque-alvo especificado é encontrado.
Tipo de Rundown: Até o aperto: O cálculo do gradiente do encosto começa no nível Tt do acionador de torque especificado. Se nenhum acionador de torque for definido, o cálculo de gradiente é iniciado no começo da etapa.
O cálculo da rampa é feito entre dois pontos angulares afastados em Ad graus e é feito da seguinte forma: (Tn – Tn-1) / (An – An-1) e, assim que duas rampas consecutivas forem maiores do que TSLOPE o ponto de aperto é encontrado.
Parâmetro | Description (Descrição) |
|---|---|
Tipo de Rundown | To Torque (Até o Torque) ou To Snug (Até o Aperto). |
Target torque (Torque-alvo) | Padrão: “não definido”. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Trigger Torque (Torque de Acionamento) | Se o Tipo de Rundown for To Snug (Até o Aperto), o campo Trigger torque (Torque de acionamento) é exibido. Padrão: “não definido”. Deve ser > 0. |
Ângulo delta | Se o Tipo de Rundown for Até o aperto, o campo Ângulo Delta é exibido. Padrão: "0". Deve ser > 0. |
Taxa de Torque | Se o Tipo de Rundown for Até o aperto, o campo Taxa de Torque é exibido. Padrão: "0". Deve ser > 0. |
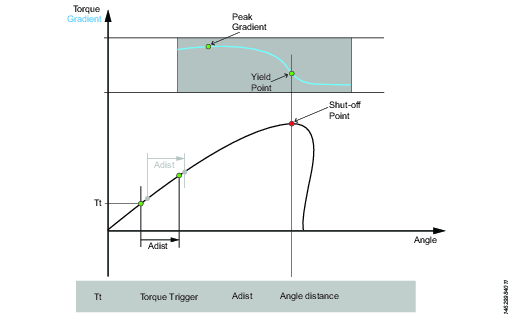
Y - Apertar conforme até o Limite de escoamento
Essa estratégia funciona a ferramenta com a velocidade no sentido do avanço até ser detectado o ponto de escoamento. O ponto de escoamento é encontrado monitorando-se o gradiente do torque a partir do ponto em que o torque supera o nível do Torque de acionamento , calculado com base em medições da distância de Torque e Angular. O parâmetro distância angular é definido de acordo com a rigidez especificada da junta.
Defina a Janela de ângulo gradiente (para uma junta rígida, para uma junta flexível ou para definir manualmente anela de Ângulo). Se for selecionado Manual , a Janela de ângulo deve ser definida. Uma junta é considerada Rígida se os parafusos forem apertados até o torque integral e girarem 30 graus (ou menos) após serem apertados até o seu ponto de encosto. Uma junta Flexível gira 720 graus ou mais após ter sido apertada até o seu ponto de encosto. O parâmetro de rigidez define a Janela de ângulo para o cálculo do gradiente. Quanto mais rígida a junta menor a janela de ângulo.
Parâmetro | Description (Descrição) |
|---|---|
Gradient Angle Window (Janela Angular - Gradiente) | Especifica a Angle Window (Janela Angular):
|
Angle Window (Janela Angular) | Disponível quando Gradient Angle Window (Janela Angular - Gradiente) for definido em Manual. Deve ser > 0 e <=100. |
Trigger Torque (Torque de Acionamento) | A medição do ângulo começa neste acionamento. Deve ser >= 0 e < Torque máx. da ferramenta. |
Damping (Amortecimento) | Frequência com que o gradiente é calculado. Deve ser > 0 e < 100 e < Angle Window (Janela Angular). |
Yield Point Percentage (Porcentagem do Limite de Escoamento) | Deve ser >= 20 % |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Torque Filter Type (Tipo de Filtro de Torque) | O tipo do filtro:
|
Cut-off Frequency (Frequência de Corte) | Precisa ser especificado quando Torque Filter Type (Tipo de Filtro de Torque) é definido como Low pass (Passa baixo):
|
Number of Samples (Número de Amostras) | Precisa ser especificado quando Torque Filter Type (Tipo de Filtro de Torque) é definido como Sliding Average (Média Móvel):
|
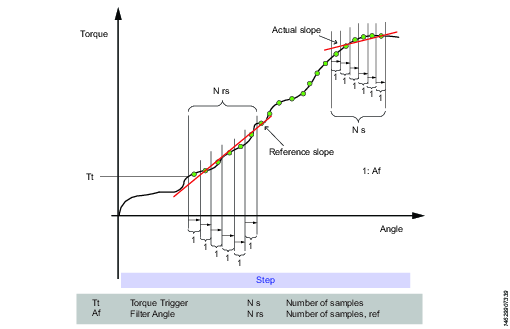
Apertar conforme o ponto de escoamento, método 2 (YM2)
Essa etapa funciona a ferramenta com a velocidade especificada no sentido do avanço até ser detectado o ponto de escoamento.
Buscar os inícios dos pontos de escoamento quando o torque alcançar Tt. A média do torque é calculada em graus Af. Esse procedimento é repetido N rs vezes.
A inclinação de referência é calculada por regressão linear ao longo dos pontos N rs . Depois disso, novos valores médios são continuamente calculados com os graus A f .
A inclinação real é calculada por regressão linear com os últimos pontos médios de N s . O ponto de escoamento é alcançado quando a inclinação é menor que a Py % da inclinação de referência.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo de filtro | Padrão: 1. Deve ser > 0. |
Número de amostras | Padrão: 6. Deve ser >=4. |
Número de amostras, referência | Padrão: 6. Deve ser >=4. |
Porcentagem do limite de escoamento | Padrão: 90%. Deve ser >20%. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Speed ramp (Rampa de velocidade) | Se o tipo de rampa de velocidade for Manual, esse campo se abre. Padrão: 500 rpm/s. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
TC – Calibração do torque
Essa etapa funciona a ferramenta com a velocidade especificada no sentido de avanço até ser alcançado o torque-alvo.
Ao definir como Principal ou Secundário, é possível calibrar qualquer um dos dois transdutores.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Transdutor | Principal ou secundário. Padrão: Principal. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Engatar (E)
Essa etapa funciona a ferramenta em ambos os sentidos até o soquete engatar no parafuso. A etapa continua até ser atingido o Torque-alvo ou o Ângulo-alvo, desde que Continuar se não Engatado estiver definido como Sim. Se o Ângulo-alvo é alcançado em qualquer sentido, o sentido será invertido. Limite as interações de busca inserindo Número máx. de tentativas de engate. Se o Torque-alvo for atingido em qualquer sentido, a etapa finalizará com o status OK.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo-alvo | Padrão: 0. Deve ser > 0. |
Máximo de tentativas para engate | Padrão: 2. Deve ser > 0. |
Continuar se não estiver engatado | Se Sim, a etapa terminará com status OK, mesmo que as tentativas de engate falharem. Se Não, a etapa terminará com status NOK, mesmo que as tentativas de engate falharem. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
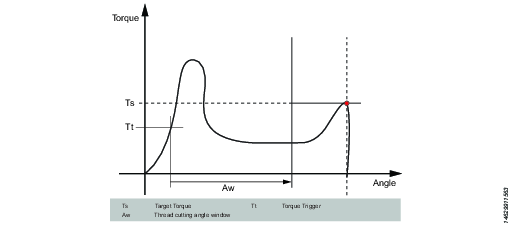
Abertura de rosca conforme o Torque (ThCT)
A função Abertura de rosca conforme o Torque ativa o aperto onde o torque de Rundown exigido é maior do que o torque de Rundown concluído, por exemplo, ao apertar camadas finas de metal utilizando parafusos autoatarraxantes (ou autorroscantes). A ferramenta funciona no sentido do avanço até ser atingido o Ângulo de abertura de rosca (Aw) A janela Ângulo de abertura de rosca é medida a partir do ponto em que o torque ultrapassa o Torque de acionamento de abertura de rosca (Ttc) da primeira vez. A partir do ponto em que o Ângulo de abertura de rosca é atingido, a etapa continua a ser executada até ser alcançado o Torque-alvo .
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Janela de ângulo de abertura de rosca | Padrão: 0. Deve ser > 0. |
Trigger Torque (Torque de Acionamento) | A medição do ângulo começa neste acionamento. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
Apertar conforme o Torque e Ângulo (T&A)
A ferramenta opera na velocidade especificada na direção Avançar até que tanto o torque-alvo quanto o ângulo-alvo sejam atingidos. O torque-alvo e o ângulo-alvo devem ser definidos como > 0.
Parâmetro | Description (Descrição) |
|---|---|
Target torque (Torque-alvo) | Deve ser > 0. |
Ângulo-alvo | Padrão: 0. Deve ser > 0. |
Freio | Se estiver Ativo, a ferramenta irá parar quando o alvo for atingido. Se estiver Desativado, o programa irá diretamente para a próxima etapa sem parar a ferramenta. |
Speed (Velocidade) | Padrão: 60 rpm. Deve ser > 0. |
Speed ramp type (Tipo da rampa de velocidade) | Rígida, flexível ou manual. Padrão: Rígida. Se você selecionar Manual, o campo da rampa de velocidade se abre. |
TP - Tensor Pulse
Antes de usar a etapa de aperto do Tensor Pulse, é obrigatório que o tipo de licença a seguir seja instalado no controlador:
Low Reaction Strategies (Estratégias de Baixa Reação)
Tensor Pulse somente está disponível para as ferramentas a seguir: ETV-STR61-100-13, ETV-STR61-70-13, ETV-STR61-50-10.
Essa etapa gera pulsos de aperto no sentido de avanço, até ser atingido o torque-alvo.
Parâmetro | Description (Descrição) |
|---|---|
Torque Target - Ts (Alvo de Torque - Ts) | Torque Target (Alvo de torque) deve ir de 0 até o torque máximo da ferramenta. |
Pulse Energy - Pe (Energia de pulso - Pe) | Pulse Energy (Energia de Pulso) é usado para controlar o valor da energia/corrente em cada pulso. Pulse Energy (Energia de Pulso) deve ir de 0 a 100%. |
Reaction Force Tuning Factor (Fator de Regulagem da Força de Reação) | O Fator de regulagem da força de reação é usado para regular a força de reação ao executar a etapa Tensor Pulse. O Fator de regulagem da força de reação deve ir de 0 até 100%. |









































