Drehmoment (Steuerung) / Vorherrschendes Drehmoment (Überwachung)
Diese Strategie leitet den Bediener bei der Verschraubung von Verbindungen mit einem vorherrschenden Drehmoment bis zum Solldrehmomentwert an. Sie ist besonders hilfreich, wenn der vorherrschende Drehmomentwert der Verbindung höher als das finale Enddrehmoment ist.
Diese Strategie berechnet den vorherrschenden Drehmomentwert in einer festgelegten Winkel-Fensterlänge, um den vorherrschenden Drehmomentwert vom absoluten Spitzendrehmomentwert der Verschraubung abzuziehen und zu überprüfen, ob der gewünschte Solldrehmomentwert tatsächlich erreicht wurde oder nicht.
Parameter | Beschreibung |
|---|---|
Kennzeichen-Nummer erforderlich | In das TAG des Werkzeugeinsatzes muss eine bestimmte Zahl eingetragen werden. |
Bezeichnung | Der Name des Verschraubungsprogramms. |
Programmstart | Drehmomentwert, ab dem der Verschraubungsvorgang beginnt. |
Moment untere Toleranz | Untere Drehmomentgrenze. |
Moment obere Toleranz | Obere Drehmomentgrenze. |
Oberer Drehmomentgrenzwert | Wenn das angelegte Drehmoment diese Grenze erreicht, wird auf dem Display des Schlüssels die Meldung Schraube wechseln angezeigt. |
Solldrehmoment | Solldrehmomentwert. |
Startdrehmoment | Drehmomentwert, ab dem die Winkelmessung beginnt (normalerweise auf 50 % des Solldrehmoments gesetzt). |
Verzögerungsüberwachung | Winkelwert, nach dem die Winkelmessung beginnen muss. |
Startwinkelabstand | Winkelwert, der vom Fügepunkt in die entgegengesetzte Richtung reicht und festlegt, wo die Winkel-Fensterlänge beginnt. |
Fensterlänge | Winkelintervall, in dem der Ausgleichswert berechnet wird. |
Ausgleich | Verfahren zur Festlegung des Verschraubungsergebnisses:
|
Oberer Grenzwert | Obergrenze des Drehmomentwerts für ein IO-Ergebnis. Oberer Grenzwert muss > 0 sein |
Unterer Grenzwert | Untergrenze des Drehmomentwerts für ein IO-Ergebnis. Unterer Grenzwert muss ≥ 0 sein |
Wert verwenden | Verfahren zur Festlegung der Berechnung des vorherrschenden Drehmomentwerts im Intervall der Winkel-Fensterlänge.
|
Drehmomenteinheiten | Dieser Parameter kann nicht bearbeitet werden. |
Drehmoment-Korrekturkoeffizient | Wenn Verlängerungen verwendet werden, kann der Schlüsselmesswert kompensiert werden, um einen genaueren Drehmomentwert anzuzeigen. Informationen zur korrekten Berechnung des Korrekturkoeffizienten finden Sie unter Berechnung des Drehmoment-Korrekturkoeffizienten. Wenn keine Verlängerungen verwendet werden, ist der Drehmoment-Korrekturkoeffizient = 1. |
Winkelkorrektur | Wenn Verlängerungen zusätzliche Verformungen des Schlüssels verursachen, kann der Schlüsselmesswert kompensiert werden, um einen genaueren Winkelwert anzuzeigen. Wenn keine Verlängerungen verwendet werden, ist die Winkelkorrektur = 0. |
Gruppengröße | Anzahl der von der Gruppe ausgeführten Verschraubungen. |
Max. aufeinanderfolgende NIO | Anzahl zulässiger aufeinanderfolgender NIO für ein OK-Ergebnis. |
Endzykluszeit | Beginnt, wenn das Drehmoment nach Erreichen des 3. Prozentwertes unter den Programmstart fällt. |
Ratschenzeit | Beginnt, wenn das Drehmoment ohne Erreichen des 3. Prozentwertes unter den Programmstart fällt. Der Bediener kann nun das Drehmoment kurz verringern und während der Verschraubung wieder aufladen. |
Die Winkel-Fensterlänge, in der der vorherrschende Drehmomentwert berechnet wird, beginnt bei der unter Startwinkelabstand festgelegten Gradzahl, gemessen in umgekehrter Richtung ab dem Fügepunkt, welcher vom System automatisch in Echtzeit berechnet wird. Das Winkelfenster umfasst anschließend die unter Fensterlänge festgelegte Gradzahl in entgegengesetzter Richtung. Der berechnete vorherrschende Drehmomentwert kann entweder der während der Fensterlänge gemäß der für den Verschraubungsvorgang festgelegten Option unter Wert verwenden gemessene mittlere oder der Spitzendrehmomentwert sein.
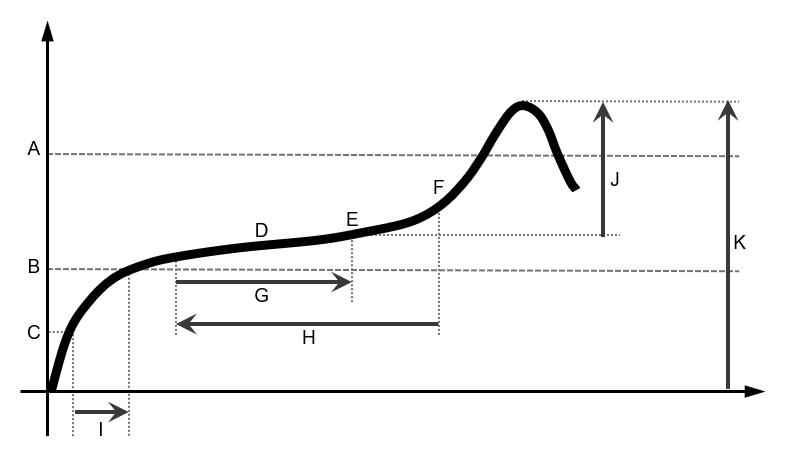
A | Oberer Grenzwert | G | Fensterlänge |
B | Unterer Grenzwert | H | Startwinkelabstand |
C | Startdrehmoment | I | Verzögerungsüberwachung |
D | Durchschnittsdrehmoment während der Winkelfensterlänge | J | Durch Abzug des vorherrschenden Drehmoments ausgeglichener Spitzendrehmomentwert. |
E | Spitzendrehmoment während der Winkelfensterlänge | K | Spitzendrehmomentwert ohne Ausgleich. |
F | Kopfauflagepunkt |
Drehmomentergebnisse:
Wenn Ausgleich auf Ein gesetzt ist, wird der berechnete vorherrschende Drehmomentwert vom absoluten Spitzendrehmomentwert abgezogen und der finale Drehmomentergebniswert ist die Differenz zwischen dem Drehmomentspitzenwert und dem vorherrschenden Drehmomentwert.
Wenn Ausgleich auf Aus gesetzt ist, wird der vorherrschende Drehmomentwert nicht vom absoluten Spitzendrehmomentwert abgezogen und der finale Drehmomentergebniswert ist der Spitzenwert der Verschraubung.
Während des Verschraubungsvorgangs werden LEDs, Summer und Vibration wie folgt aktiviert:
LEDs:
Weiße LED: Wird aktiviert, wenn der Drehmomentwert den Wert Minimallast des smartHEAD übersteigt.
Die erste, zweite und dritte radial verlaufende LED färben sich nacheinander grün, wenn die drei für das verwendete Werkzeug definierten Grenzwerte erreicht werden.
Weitere Informationen finden Sie unter Werkzeug-LEDs.Alle drei radial verlaufenden LEDs grün: Drehmoment zwischen Untergrenze und Obergrenze.
Alle drei radial verlaufenden LEDS rot: Drehmoment über der Obergrenze.
Summer:
Beginnt, wenn das Drehmoment den Wert für Programmstart überschreitet; das Signal steigt an, wenn der 1. Prozentwert, der 2. Prozentwert und der 3. Prozentwert erreicht werden.
Vibration:
Beginnt zusammen mit den dritten radialen Gradienten-LEDs.
Am Ende des Verschraubungsvorgangs werden LEDs, Summer und Vibration wie folgt aktiviert:
Das Verhalten der LEDs entspricht der Konfiguration der für das verwendete Werkzeug festgelegten Ergebnisanzeige und Dauer.
Weitere Informationen finden Sie unter Werkzeug-LEDs.Summer
Zwei Pieptöne zeigen das Ende des Vorgangs an; liegt das Endergebnis im roten Bereich, wird ein Dauerton ausgegeben.
Starten Sie zum Stoppen des Summers einen neuen Verschraubungsvorgang oder drücken Sie eine Taste an der Werkzeugsteuerung.
Vibration:
Bleibt aktiv, bis das angelegte Drehmoment gelöst wird.









































