ILS Sensor
Positioning system
产品信息
一般信息
安全警示语
危险、警告、小心和注意等安全警示语的意思如下:
危险 | 危险表示一种危险的情况,如果不能避免,将会导致死亡或严重伤害。 |
警告 | 警告表示一种危险的情况,如果不能避免,可能导致死亡或严重伤害。 |
小心 | 小心与安全警告标志一起使用,表示一种危险的情况,如果不能避免,可能会导致轻微或中等程度的伤害。 |
注意 | 注意用于指示与个人伤害无关的操作。 |
质保
产品保修期将在 Atlas Copco 配送中心发货后的 12+1 个月后到期。
保修不包括部件正常的磨损和断裂。
“正常磨损和断裂部件”是指在工具常规维护期内,需要更换、进行其他调整/大修的部件(以时间、运行时数或其他形式表示)。
产品保修以工具及组件的正常使用、维护和修理为前提。
本保修不适用于在保修有效期内因维护保养不当或由 Atlas Copco 及其授权维修服务合作伙伴之外的他方进行维修保养而造成的损坏部件。
要避免工具零配件损坏或断裂,请按建议的维护周期保养工具并严格遵守说明操作。
保修类修理仅在 Atlas Copco 维修间或由获得授权的维修服务合作伙伴处理。
Atlas Copco 通过 ToolCover 合约提供延保及最佳的预防维护服务。有关详情,请联系您当地的服务代表。有关详情,请联系您当地的服务代表。
电动马达:
保修仅适用于未打开过的电动马达。
网站
有关我们的产品、配件、备件和已发布事项的信息,请访问 Atlas Copco 网站。
请访问:www.atlascopco.com.
ServAid
ServAid 是一个持续更新的门户网站,含有技术信息,例如:
法规和安全信息
技术数据
安装、操作和维修说明
备件列表
附件
尺寸图
请访问:https://servaid.atlascopco.com.
如需进一步的技术信息,请联系您当地的 Atlas Copco代表。
安全数据表 MSDS/SDS
安全数据表描述了 Atlas Copco销售的化学产品。
有关更多信息,请访问 Atlas Copco网站 www.atlascopco.com/sds。
原产地
对于原产地,请参见产品标签上的信息。
尺寸图
尺寸图可以在尺寸图存档或 ServAid 上找到。
请访问:http://webbox.atlascopco.com/webbox/dimdrw或 https://servaid.atlascopco.com。
概览
系统概述
ILG 是一款集成的独立防错系统,可为从简单到复杂的各种应用提供高水准的过程安全性。
ILG 追踪需拧紧螺栓的确切位置,确保拧紧先后顺序的一致性和拧紧策略的完整性。该系统由 ILG 软件、定位硬件(ILS 传感器)和拧紧控制器组成,将拧紧系统的功能与位置和过程控制相结合。
监视工具在工作区的位置。
指导操作员按照正确的流程完成工作。
自动选择该位置的拧紧参数。
确保按规格拧紧正确的紧固件。
每个位置的唯一 P-Set 选择,以实现完全的可追溯性。
定位硬件包括集成到扭矩臂或类似应用的枢轴接头或线性导轨中的高精度旋转或线性位置传感器。传感器通过网关模块与拧紧控制器或工业 PC 连接。网关模块使用 Modbus TCP 协议与 ILG 服务进行通信。ILG 服务通过开放协议与拧紧控制器通信。多个 Atlas Copco 拧紧控制器型号与系统兼容,各种定位硬件配置可供选择,以适应不同的臂型。
ILG 系统包括:
ILG 软件
定位硬件
拧紧控制器
工业 PC(可选/取决于应用)
ILG 服务接收来自定位硬件传感器的数据,实时计算三维空间中的工具位置。一旦工具位于指定位置,ILG 服务将选择拧紧程序 (P-Set) 并通过开放协议启用工具。可视指示器通过多层警示灯、工具 LED 或 HMI 过程屏幕将提醒操作员启动工具。
ILS 传感器
ILS 传感器是一款现场防错过程安全系统高级无线线路,由传感器和标签反光片组成。
当在覆盖区域内可见时,接收器对工具标签的实时位置进行三角化,传感器计算标签矩阵位置并为标签位置生成 (X,Y,Z) 和 (P,Y,R) 位置数据值。跟踪模块向 ILG 软件发送信息。
ILG 软件验证位置,并用于启用或禁用工具。采用开放协议,为螺栓/工艺级操作提供位置防错。
ILS 传感器
根据应用的类型,有两种类型的接收器:
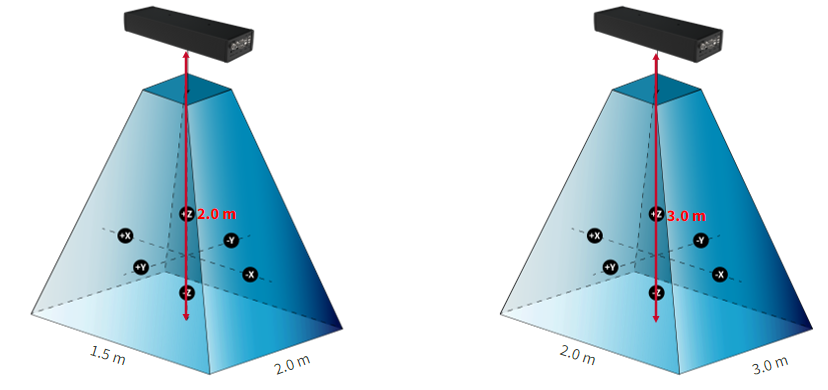
ILS Sensor Standard
标准 ILS 传感器的螺栓精度为 10 毫米,用于标准应用。
ILS Sensor Wide
宽 ILS 传感器的螺栓精度为 20 毫米,用于更大的面积覆盖。
传感器结构
ILS 传感器由两个摄像头、两个红外照明单元和一个计算单元组成。

连接器板概述
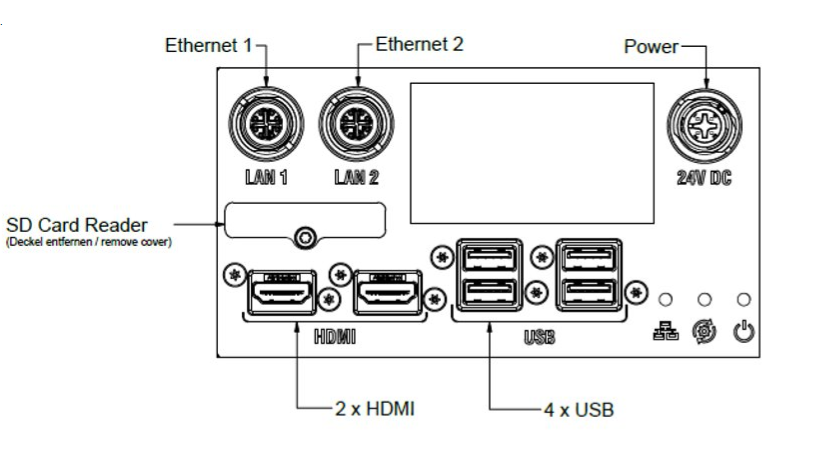
项目 | 说明 |
|---|---|
LAN 1 | 可配置 IP 地址的以太网连接 |
LAN 2 | 固定 IP 地址的以太网连接(默认 169.251.1.1) |
24V DC | 电源入口(135 W,5.6 A) |
SD 卡 | SD 卡用于存储设置,并在不同的 ILS 传感器之间传输配置。 |
HDMI | 显示器的 HDMI 连接 |
USB | 键盘、鼠标、扫描仪和其他附件的 USB 连接 |
状态灯指示
传感器连接器板上的状态灯提供以下信息:
符号 | 状态灯颜色 | 说明 | |
|---|---|---|---|
| 橙色(快速闪烁) |
| |
绿色(持续点亮) | 以太网电缆连接到 LAN1 端口,以太网连接已建立,但传感器跟踪软件未运行 | ||
红色(慢闪) | 从 LAN1 端口断开的以太网电缆和/或无法建立以太网连接 | ||
| 黑色(不亮) |
| |
绿色(持续点亮) | 传感器 PC 运行,工作正常 | ||
绿色(闪烁) | 传感器 PC 待机 | ||
| 黑色(不亮) |
| |
绿色(持续点亮) | 通电(24 伏直流电可用) | ||



电缆信息
电源电缆
电源电缆采用标准原始电缆,M12 4 针裸线
连接器:母 4 针 M12 A-编码
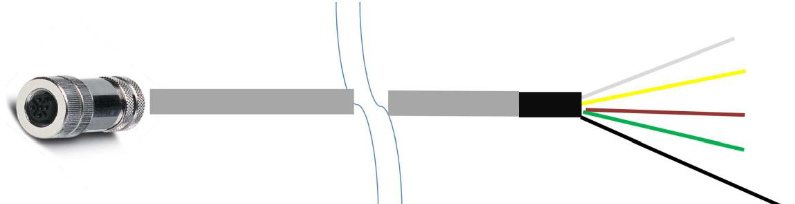
侧 A | 电线颜色 | 侧 B | 功能 |
|---|---|---|---|
1 | 白色 | 明线 | +24V |
2 | 黄色 | 明线 | +24V |
3 | 棕色 | 明线 | 地线 |
4 | 绿色 | 明线 | 地线 |
以太网电缆
标准以太网电缆,PoE+ 采用 M12 x 编码

侧 A | 电线颜色 | 侧 B |
|---|---|---|
1 | 橙白色 | 1 |
2 | 橙色 | 2 |
3 | 绿白色 | 3 |
4 | 绿色 | 6 |
7 | 蓝白色 | 5 |
8 | 蓝色 | 4 |
5 | 棕白色 | 7 |
6 | 棕色 | 8 |
产品数据
电源 | 135 W |
额定电压 | 24 V |
长度 | 921 mm |
宽度 | 171.6 mm |
高度 | 84.6 mm |
重量 | 8.4 Kg/18.5lb |
红外光波长 | 850 nm |
保养概述
维修建议
建议定期进行预防性维护。请参见预防性维护的详细信息。如果产品工作不正常,请勿运行并对其检查。
如果未包含预防性维护的详细信息,须遵守一般操作指南:
彻底清洗相应的零部件
更换任何故障或磨损零部件
安装
安装说明
一般安装安全
传感器必须安装在工作站的架空或地板立柱上,但不得受到任何工作站振动或工具移动的影响,它们可能会导致路线改变。
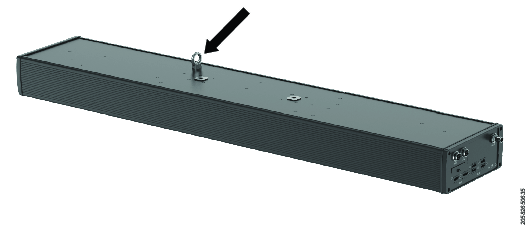
安装 ILS 传感器
在安装 ILS 传感器之前,请仔细考虑预期位置。请记住,目标必须始终对 ILS 传感器的相机可见。
安装 ILS 传感器。请与当地的 Atlas Copco 代表联系,了解适当的安装支架和安装说明。
将以太网电缆连接到端口 LAN1或端口 LAN2。

端口 LAN1 是可配置的,而端口 LAN2 使用固定 IP 地址(默认为 169.251.1.1)。
将其他设备,如键盘、鼠标、扫描仪和附件连接到 USB 端口。
将监视器连接到 HDMI 端口。
将 24V 直流电源电缆连接到 24V DC 端口(135 W,5.6A)。
要设置并配置 ILS 传感器,请参阅 ILG 软件用户指南。
初始配置
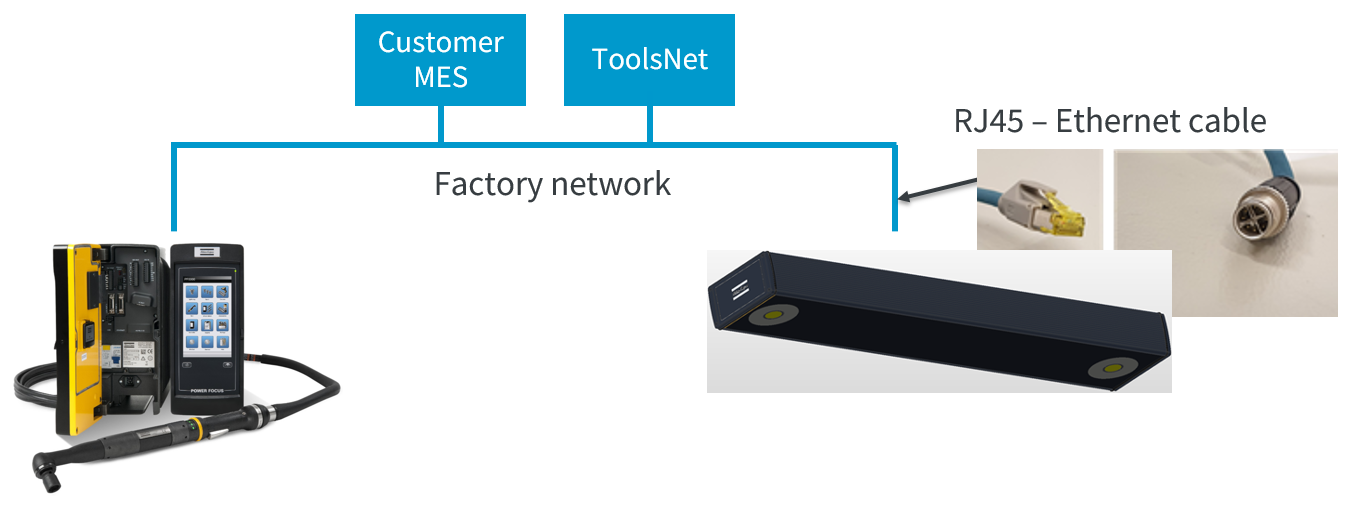
控制器连接选项
ILS 传感器可以通过以下方式连接到控制器:
通过控制器的工厂端口。(支持 Power Focus 6000、Power Focus 4000 和 Power MAC 控制器)。
通过控制器的 COM 端口。(仅适用于 Power Focus 6000 控制器)。
通过工厂网络。(仅适用于 Power Focus 6000 控制器)。
通过工厂端口连接到控制器
当 ILS 传感器连接到控制器的工厂以太网端口时,控制器不能连接到客户的工厂网络。
不使用路由器或以太网交换机
从 ILS 传感器的 LAN 1 端口连接以太网电缆到控制器的工厂以太网端口。
将第二根以太网电缆从 ILS 传感器的 LAN2 端口连接到外部 PC。
将显示器、键盘、鼠标和其他附件连接到 ILS 传感器的 USB 端口。
检查控制器的 IP 设置。
使用远程桌面连接 App 将外部 PC 连接到 ILS 传感器。在远程桌面连接 App 中,键入 ILS 传感器的名称:
Ivne-xxxxxxxx,其中 xxxxxxxxx 是 ILS 传感器的序列号(印在连接器板的标签上)。
转到控制面板>网络和互联网>以太网>更改适配器选项>LAN 1 属性>互联网协议第 4 版>属性。
将 ILS 传感器的 IP 地址更改为与控制器相同的 IP 范围。
完成 ILG 许可证的安装后,外部 PC 可以与工作站断开连接。
使用路由器或以太网交换机
将一条以太网电缆从 ILS 传感器的 LAN 1 端口连接到路由器。
将另一条以太网电缆从控制器的工厂以太网端口连接到路由器。
将外部 PC 连接到路由器。
将显示器、键盘、鼠标和其他附件连接到 ILS 传感器的 USB 端口。
检查控制器的 IP 设置。
打开 web 浏览器,键入控制器工厂以太网端口的 IP 地址。
使用远程桌面连接 App 将外部 PC 连接到 ILS 传感器。在远程桌面连接 App 中,键入 ILS 传感器的名称:
ivne-xxxxxx,其中 xxxxxx 是 ILS 传感器的序列号(印在连接器板的标签上)。
转到控制面板>网络和互联网>以太网>更改适配器选项>LAN 1 属性>互联网协议第 4 版>属性。
将 ILS 传感器的 IP 地址更改为与控制器相同的 IP 范围。
完成 ILG 许可证的安装后,外部 PC 可以与工作站断开连接。
通过 COM 端口连接到控制器
不使用路由器或以太网交换机
使用 COM 端口适配器 4222 3073 00 将以太网电缆从 ILS 传感器的 LAN 1 端口连接到控制器的 COM 端口。
将第二根以太网电缆从 ILS 传感器的 LAN2 端口连接到外部 PC。
将显示器、键盘、鼠标和其他附件连接到 ILS 传感器的 USB 端口。
检查控制器服务端口的 IP 设置。默认情况下,IP 地址为 169.254.1.1。
使用远程桌面连接 App 将外部 PC 连接到 ILS 传感器。在远程桌面连接 App 中,键入 ILS 传感器的名称:
ivne-xxxxxxxx,其中 xxxxxxxxx 是 ILS 传感器的序列号(印在连接器板的标签上)。
转到控制面板>网络和互联网>以太网>更改适配器选项>LAN 1 属性>互联网协议第 4 版>属性。
将 ILS 传感器的 IP 地址更改为与控制器相同的 IP 范围:169.254.1.xxx。
ILG>安装>工具>控制器>IP 中的 IP 地址必须与PF>设置>网络>IP地址中的相同,在本例中为 169.254.1.1。
完成 ILG 许可证的安装后,外部 PC 可以与工作站断开连接。
通过工厂网络连接到控制器
将 ILS 传感器的 IP 范围更改为与控制器相同的 IP 范围。
当 ILS 传感器正在使用工厂端口时,控制器不能连接到工厂网络。
使用 Windows 远程桌面连接到外部 PC
将以太网电缆连接到 ILS 传感器的 LAN 2 端口。将以太网电缆的另一端连接到外部 PC。
给 ILS 传感器通电。
在外接 PC 上打开远程桌面连接 App。
键入 ivne-xxxxxxxx(其中 xxxxxxxx 是 ILS 传感器的名称),选择连接。
传感器的名称是序列号,可在产品标签上找到。
在登录窗口中键入密码 (Iisra),并选择是。
ILS 传感器和 ILG 软件在外部 PC 上远程运行。
操作
人体工学指导准则
通读此一般人体工学指导准则列表时考虑您的工作台,找出在姿势、组件放置或工作环境方面可以改进的地方。
请频繁地间歇并更换作业位置。
根据需求和工作任务调整工作台区域。
通过确定需要放置零件和工具的位置调整出方便的范围,避免静态运功。
使用工作台设备,例如适合工作任务的桌椅。
避免作业位置高于肩部水平线或在装配操作期间静态持握工具。
在肩部水平线以上位置作业时,通过减轻工具重量来减少静态的肩部肌肉负担,例如使用扭矩臂、软管卷盘或重量平衡器。您也可以通过在近身位置持握工具来减轻静态的肩部肌肉负担。
经常休息。
避免肩部或腕部使用极端姿势,尤其在需要使用一定力量的操作过程中。
调整出方便的视野,使眼睛和头部的运动最少。
处理工作任务时使用适当的照明。
处理工作任务时选择适当的工具。
在嘈杂的环境中,请使用护耳设备。
使用高质量插入式工具和消耗品以最大限度减少暴露于过度振动的情况。
尽量减少在反作用力情况下的暴露。
切割时:
如果切割轮弯曲或者未正确予以引导,则切割轮可能会卡住。针对切割轮使用正确的法兰,并在操作过程中避免弯曲切割轮。
钻孔时:
当钻头打穿时,钻孔机可能会停转。如果停转扭矩高,请使用支撑手柄。安全标准 ISO11148 第 3 部分建议,对于枪柄式工具使用可吸收 10 Nm 以上反作用扭矩的设备,对于直柄式工具,使用可吸收 4 Nm 以上反作用扭矩的设备。
使用直接驱动螺丝刀或扳手时:
反作用力取决于工具的设置和连接件的特性。力量和姿势决定了操作员可以承受的反作用力大小。调整扭矩设置,以适合操作人员的力量和姿势,如果扭矩过高,则使用扭矩臂或反作用杆。
在多尘环境中,请使用除尘系统或戴口罩。
目标定位
ILS 传感器中的传感器用于定位安装在手动工具上的目标。
工作空间中可以同时存在多个目标。目标包含一个或多个不同的标签。
目标定位包括以下步骤:
识别标签。
为标签执行位姿计算。
获得标签位姿计算结果。
识别标签
每个目标都可通过一个或多个标签唯一标识,其应用于特定的手动工具。标签通过特定的模式代码及其特定的标签 ID 来特征化。每个模式代码属于一组可用的模式。

被动目标标签的检测
被动标签由基板、反光片和特定图案组成。
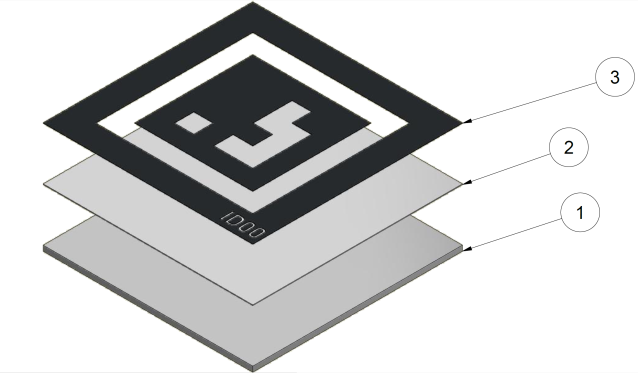
1 | 底板 |
2 | 反光片 |
3 | 特定图案 |
传感器的照明单元发射红外光,红外光射向反光片。无论入射方向和反光片的方位如何,反光片在很大程度上沿着入射电磁波射入的方向反射入射电磁波。
反光片的基板由小的透明玻璃球组成,这些玻璃球聚焦了大部分入射光。
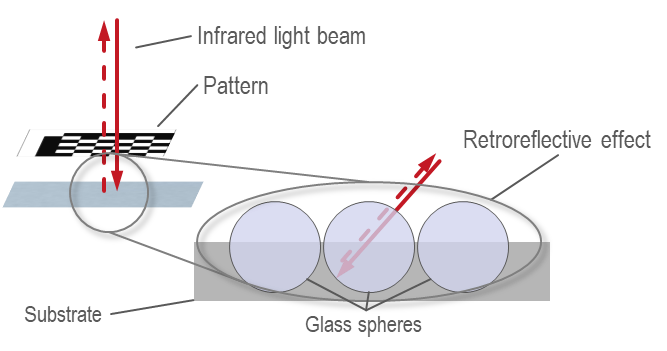
由于折射率与空气不同,球体的后表面是反光的。由于这种效应,箔片将光线反射回传感器。每个标签由其特定的图案定义。
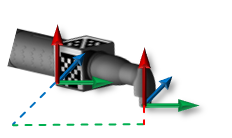
对标签进行位姿计算
通过两个摄像头的立体逼近,由相应的标签角点计算出标签的 3D 点。系统确定图像中标签区域的角。
目标位姿计算 3D 结果
基于标签的位姿,目标在相应坐标系中的位姿(位置和方向)得到确定。
维修
预防静电
产品和控制器内部的零部件对静电敏感。为了避免影响正常使用,确保在防静电的工作环境下对工具进行维护和保养。下图为相关的维修工作台示例。

维护说明
维修建议
建议定期进行预防性维护。请参见预防性维护的详细信息。如果产品工作不正常,请勿运行并对其检查。
如果未包含预防性维护的详细信息,须遵守一般操作指南:
彻底清洗相应的零部件
更换任何故障或磨损零部件