STRwrench Firmware (3.13)
简介
在本部分,您可以找到有关产品的基本信息以及主题中使用的格式约定。
一般数据保护条例(GDPR)
本产品提供了处理个人身份信息的可能性,例如系统用户名、角色和 IP 地址。这种处理能力的目的可能是通过可追溯性和适当的访问管理来加强质量控制。
如果您决定处理个人数据,您需要了解并遵守相关的个人数据保护规则,包括 EU GDPR 以及任何其他适用的指令和法规。对于您对本产品的任何使用,阿特拉斯·科普柯不承担任何责任。
责任和警告
责任
在工作环境下,许多情况可能影响拧紧流程,为此须对结果进行验证。在此,我们要求用户遵守相关标准和/或法规,在出现可能影响拧紧结果的情况后,检查安装的扭矩和旋转方向。此类情况的示例包括但不限于:
工具系统初始安装
更改部件批次、螺栓、螺钉批次、工具、软件、配置或环境
更改通风或电气连接
更改管路人体工程学特性、流程、质量程序或操作法
更换操作员
任何影响拧紧流程结果的其他变更
检查应:
确保未因发生的影响情况改变接头状况。
在设备初始安装、维护或修理后实施。
至少在每次换班后检查一次或以合适的频率进行检查。
警告
关于本用户指南
本用户指南介绍了如何使用 STRwrench 用户界面设置和配置 STRwrench。
修订历史
发行号 | 修订日期 | 修订说明 |
|---|---|---|
3.13 | 06-2025 | 新增内容:
更新内容: |
3.11 | 02-2024 | 新增内容:
更新内容: |
3.10 | 09-2023 | 新增内容:
更新内容:
|
3.9 | 03-2023 | 新增内容:
更新内容:
|
3.8 | 06-2022 | 新增内容:
|
3.7 | 02-2022 | 新增内容:
|
3.6 | 06-2021 | 新增内容:
|
1.0 | 03-2021 | 第一版。 |
目标群体
本用户指南适用于使用 web 用户界面配置或操作 STRwrench 的任何人。
前提条件
有兴趣进一步了解 STRwrench web 用户界面的任何人均可从阅读本用户指南中受益。
为了全面理解用户指南中的技术方面,建议执行以下操作:
了解拧紧技巧
使用 Power Focus 6000 或 Power Focus 4000 的体验
有关 Power Focus 6000 和 Power Focus 4000 的更多信息,请参阅 Power Focus 6000 用户指南和 Power Focus 4000 用户指南。
规则
为了增强用户的了解,本文档中使用了某些格式约定。所使用的格式约定列出如下。
元素 | 符号 | 说明 | 输出 |
|---|---|---|---|
一般重点 | 在程序工作区中。 | 使某些文本元素脱颖而出,或突出显示。 | 文字为粗体 |
图形用户界面 (GUI) 项目 | 选择功能按钮。 | 对在图形用户界面 (GUI) 屏幕上找到的项目的任何引用(例如:命令按钮、图标名称和字段名称)。 | 文字为粗体 |
图形用户界面 (GUI) 路径 > | 通常,在图形用户界面 (GUI) 的顶部。 | 导航辅助工具,可在图形用户界面 (GUI) 中跟踪位置。 | 例如:控制器 > 程序 > 编辑 |
用户输入 | 输入程序的说明。 | 用户输入的任何文本 | 文字为粗体 |
文件名 | 输入导出的文件名。 | 文件被导出或导入系统中 | 文字为粗斜体 |
变量和参数名称 | 输入导出的名称。 | 变量和参数名称(非值)。 | 文字为斜体 |
变量和参数值 | 输入导出的值。 | 变量和参数值。 | 文字为粗体大写 |
系统输出 | Client.Domain.Models.ExportImportConfiguration | 系统输出的任何文本。 | 文字为等宽字体 |
外部链接 | 指向具有与文档或主题内容相关的信息的外部站点的链接。这些可能包括:
| 可选文本到外部站点 | |
内部文档链接 |
如果可用,这些链接将显示在文本下方。 | 可选文本到内部内容 |
系统概述
制造系统可以由图中的功能块组成:
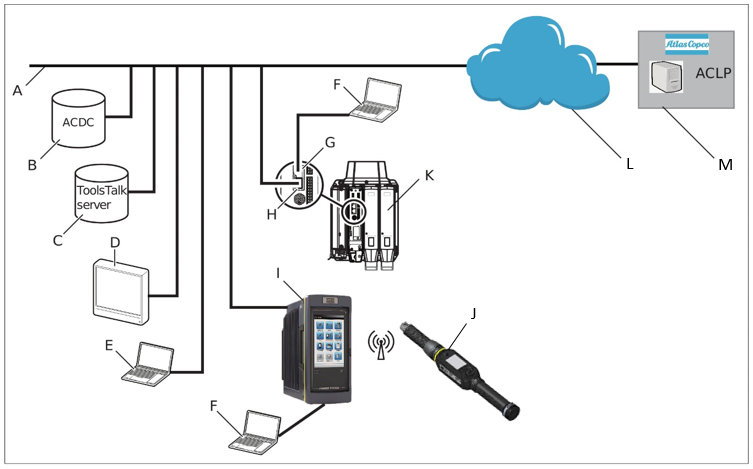
A | 工厂网络。 | H | 控制器工厂端口:连接至工厂网络。 |
B | ACDC:用于存储拧紧结果和进行统计分析。 | I | Power Focus 6000 / Power Focus 4000 控制器:与手持式工具一起使用。 |
C | ToolsTalk 2 服务器:用于控制器和工具的配置和参数设置。 | J | STRwrench:通过无线方式连接到控制器。 |
D | 工业计算机(IPC):可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | K | PF6 Flex 控制器:与夹具工具一起使用。 |
E | 连接到工厂网络的便携式计算机:可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | L | 互联网云。 |
F | 服务计算机:可以连接到控制器或 STRwrench 的服务端口。 | M | Atlas Copco 许可门户(ACLP):位于 Atlas Copco,为功能管理系统(FMS)中的许可功能提供支持。 |
G | 控制器服务端口:可用于连接服务电脑。 |
用户界面
主菜单
主菜单包含以下项目:
菜单项 | 描述 |
|---|---|
 | 拧紧 拧紧菜单显示了存储在工具中的现有拧紧程序列表。选择单个程序将打开不同的菜单,以配置和设置所选拧紧程序的参数。 |
 | 批次序列 批次序列是各种组合中一个或多个重复性拧紧程序。可以在批次序列菜单中创建和配置批次序列。 |
 | 源 来源菜单列有适用的选项,可通过不同硬件输入的数字控制所选的拧紧程序或批次序列。 |
 | 配置 在此菜单中,可以配置以下内容:
|
 | 集成控制器工具 该菜单包括以下项目:
|
 | 报告 显示最新事件。 |
 | 设置 此菜单用于设置特定设置,例如:
|
 | 许可证分配 此菜单提供当前许可证状态和许可证来源的概述。 |
图标
下表概述了用户界面中可用的图标和按钮:
图标 | 名称 | 说明 |
|---|---|---|
 | 上一页 | 返回之前的视图。 |
 | 归零 | 进入主菜单屏幕。 |
 | 转至结果 | 进入实时结果屏幕。 |
 | 挂锁 | 打开一个 PIN 码对话框。 |
 | 次 | 显示最新的拧紧事件。在设置菜单中定义要在事件配置中显示的事件。 |
 | 验证 | 根据工具值验证拧紧参数。 |
 | 添加 | 添加一个项目。 |
 | 删除 | 删除项目。 |
 | 协议状态 | 显示状态协议弹出窗口,其中显示开放协议信息和服务器连接状态。 |
 | 注意 | 表示参数配置错误的符号。 |
安装和升级
在本部分,您可以找到有助于产品初始安装或从一个版本升级到另一个版本的信息。
安装限制
Web 浏览器要求
STRwrench web 用户界面建议使用以下 web 浏览器:
Firefox
Google Chrome
Microsoft Edge
许可证
功能许可证通过功能管理系统 (FMS) 进行管理。这允许客户通过动态许可方案来定制工具功能以满足其特定需求。
可以为单个功能或功能集合获取许可证,并且可以跨多个虚拟站点部署许可证。许可证可在不再需要时返回到池中。
许可证可从 Atlas Copco License Portal (ACLP) 下载并通过 ToolsTalk 进行管理/分发,也可以存储在 FMS Portable(USB 驱动器)上用来插入工具。
请注意,本文件不涉及在 ACLP 中创建和管理客户帐户。请联系当地的 Atlas Copco 代表以获取更多信息。
有三种类型的许可证:
虚拟站点类型
修复了在单个包中捆绑在一起的特征集合。除此之外,虚拟站点类型许可证确定可以使用多少程序和序列,哪些拧紧策略可用以及可以执行的报告类型。每个虚拟站点类型中包含的特征是通常彼此结合使用的特征,或者具有需要包中存在其他特征的内部依赖项的特征。虚拟站点类型许可证完全分配给虚拟站点。然后,虚拟站点可以使用虚拟站点类型中包含的所有特征。为了能够执行拧紧,必须为虚拟站点分配一个虚拟站点类型的许可证。根据许可证类型,将启用或阻止各种拧紧选项。
虚拟站点特征
单个功能可作为单个许可证购买,以补充虚拟站点类型许可证。
控制器特征
为了执行拧紧操作,必须将集成控制器许可证存储在工具上。(当独立许可证分配给虚拟站点时不适用)。
有两类许可证可用于 STRwrench 固件:
STRwrench 集成控制器生产许可证,用于激活以下策略:
扭矩。
扭矩(控制)/角度(监视)。
扭矩(监视)/角度(控制)。
扭矩(控制)/角度(控制)“或”。
扭矩(控制)/角度(控制)“与”。
拧松。
屈服。
STRwrench 集成控制器质量许可证,用于激活以下策略:
剩余扭矩/角度。
剩余扭矩/峰值。
可以安装一个许可证类别作为虚拟站点类型,另一个作为虚拟站点功能,以激活可用于 STRwrench 固件的所有策略。
许可证源
可以从几个不同的源获取工具上使用的许可证。同时使用的源数量限制为 10 个(10 个 FMS Portable 源,或 1 个 License Server (TT2) 源加 9 个 FMS Portable 源)。如果在达到源限制 (10) 时要从源添加许可证,则需要从工具中删除一个源的所有许可证,以便为另一源的许可证腾出空间。
源概览选项卡(源分配 > 源概览)提供了工具上安装的许可证的概览以及它们是从何处安装的。此处最多可显示 10 个不同的源,每个源都分配给 FMS P(适用于 FMS Portable 或加密狗)或 License Server (TT2)。
选择任何许可证源将显示该源的详细许可证源信息。列出的信息包括源名称和类型以及每个类别(虚拟站类型、虚拟站特征和控制器特征)中许可证的数量和类型。
即使没有安装的许可证,也可以完成受许可证控制的功能的配置,例如,拧紧程序的配置。也可以将这些功能分配给工具或虚拟站点。但是,在没有有效许可证的情况下运行功能将需要安装适当的许可证。
许可证实施分两个阶段执行:分配和运行时(按下触发器)。如果某个未安装许可证的功能已分配给一个虚拟站点,则将在用户界面的工具或任务部分出现一条警告消息(取决于缺少的是什么)。如果启动了未安装许可证的功能,则会显示一个事件,通知缺少哪个许可证。如果没有安装正确的许可证,将无法继续。在大多数情况下,运行未经许可的特征会导致锁定工具。
产品基础教程
https://www.youtube.com/watch?v=HanD0wI-w9k
在工具上安装许可证
请注意,许可证源同时限于一 (1) 个许可证服务器 (TT2) 和九个 FMS Portable(USB 加密狗)。许可证可以通过服务器 (ToolsTalk2) 或 FMS Portable 安装。如果达到许可证源限制,则需要从工具中删除一个源的所有许可证,以便从另一个源添加许可证。
每两小时都会针对许可证服务器检查现有许可证。如果在 14 天内未从许可证服务器获得任何响应,则将吊销受影响的许可证。当许可证即将到期时,用户也将收到警告。当许可证在 7 天内到期,用户将每两小时收到一次警告。如果未续订许可证,它们将过期,受影响的功能将不再可用。
从服务器安装许可证
基于服务器的许可证通过 ToolsTalk2 分发。有关如何安装服务器许可证的说明,请参阅 ToolsTalk2 用户指南。
要使用 ToolsTalk2 启用许可证安装,必须在工具中配置正确的许可证服务器设置。
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 Atlas Copco 许可证管理器字段中,将开关设置为开。
插入正确的服务器端口和服务器主机 IP 地址(通常与 ToolsTalk2 的 IP 地址相同)。
选择应用。
从 FMS Portable(USB 加密狗)安装许可证
功能管理系统 (FMS) 使用特殊的 FMS Portable 设备在工具之间传递功能。USB 闪存驱动器既包含通用存储区,又包含受信任的存储区,该存储区只能由工具中的许可证管理器访问。将从 Atlas Copco 购买的功能项下载到通用存储区。第一次将 FMS Portable 插入带有许可证管理器的工具中时,将对文件进行检测和解码,并将功能项传输到只能从许可证管理器访问的受信任存储区域。
通过 USB 适配器电缆将 USB 加密狗连接到工具。

在安装许可证之前,请确保该工具已建立与工厂网络的无线连接。
USB 许可证管理窗口将出现。池一列将显示工具上来自所有源的的总许可证计数。FMS P 上可用一列显示此加密狗上可用的许可证,来自此 FMS P 一列显示已从此特定 FMS P 移到此工具的许可证数量。
选择要在工具上安装的许可证旁边的向左箭头。
FMS P 上可用一列中的数字将减 1,来自此 FMS P一列中的数字将加 1。
从工具中删除许可证
删除服务器上安装的许可证
有关删除服务器安装的许可证的说明,请参阅 ToolsTalk2 用户指南。
删除 FMS Portable 安装的许可证
通过 USB 适配器电缆将 USB 加密狗连接到工具。
在删除许可证之前,请确保该工具已建立与工厂网络的无线连接。
如果 USB 许可证管理器窗口不可见,请转到主菜单中的许可证分配。
选择窗口右上角的 USB 图标。USB 许可证管理器对话框出现。
选择要从工具中删除的许可证旁边的向右箭头。
可以从工具中删除分配给虚拟站点的许可证。但是,结果是虚拟站点无法使用。
升级
固件版本
可以同时在工具中安装两个固件版本。在多个工具上执行升级时,安装第二个固件版本非常有用。当生产准备好切换到升级的固件时,新版本的激活从 STRwrench web 用户界面完成。
更改固件版本不会转移工具配置或拧紧程序。
软件激活
该工具可以存储两个已安装的固件版本。通过使用软件激活,可以选择要使用的固件版本。
在整个过程中,请确保将电池连接到工具。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择软件。
在软件激活窗口中选择当前或已存储的。
该工具将自动重启,以使激活生效。
更新软件版本
在整个过程中,请确保将电池连接到工具。
如果要安装的软件包与工具硬件不兼容,软件更新将被取消。将显示一条警告消息,指出导致取消的硬件部分。
有关当前工具硬件的信息,请转到集成控制器工具 > 硬件。
转到集成控制器工具菜单,然后在左侧窗格中选择软件。
转到软件更新字段,然后选择浏览。
浏览并选择包含适用软件的 zip 文件,然后按照说明完成安装。
若控制器应用反复启动失败,控制器将启动救援模式。救援模式下可安装新固件。救援镜像随软件更新包分发,可在新版发布后更新。
救援镜像更新期间切勿关闭电源。系统将在更新启动时自动重启。
产品基础教程
https://www.youtube.com/watch?v=-Vq6uKaKfcA
救援模式
在三次重启失败后,工具将进入救援模式。在该模式下,可以更新固件和/或执行磁盘管理。
将工具连接到 PC 的 USB 端口。打开 Web 浏览器,然后输入地址 169.254.1.1。
在救援模式用户界面中,转到软件更新选项卡。
选择要更新的文件系统,然后浏览以找到正确的文件。
选择更新按钮。
转到电源选项卡,然后重启系统。
将工具连接到 PC 的 USB 端口。打开 Web 浏览器,然后输入地址 169.254.1.1。
在救援模式用户界面中,转到磁盘管理选项卡。
根据需要选择修复文件系统或清除数据。
选择提交按钮。
转到电源选项卡,然后重启系统。
配置
在本部分,您可以找到有关如何创建、修改和验证产品设置的详细信息。
配置选项
工具的配置和设置可以通过以下方式进行:
STRwrench web 用户界面:工具可以通过 USB 电缆直接连接到 PC。如果工具连接到无线网络并且其 IP 地址是已知的,则可以从网络上的任何位置的计算机访问控制器。
控制器:这适用于 Power Focus 6000 和 Power Focus 4000 控制器。可以配置控制器,无论它是否连接到网络。
本用户指南涵盖 STRwrench web 用户界面。有关 Power Focus 6000 和 Power Focus 4000 的信息,请参阅 Power Focus 6000 用户指南和 Power Focus 4000 用户指南。
开始
为了更好地了解系统,本部分提供了快速指南,涵盖使用 STRwrench 和 STRwrench web 界面所需的基本步骤。本节并未解释系统的各项功能,但重点介绍了最常用的基本功能。
将工具连接到 PC 并访问 web 用户界面。在工具和 Power Focus 之间建立无线连接。
在 Power Focus 上,定义一个包含拧紧的所有相关参数(例如目标角度和目标扭矩)的拧紧程序。
如果适用,请创建一个批次序列。可以将一个或几个拧紧程序添加到批次序列中,以一系列拧紧程序进行工作。例如,批次序列可以为一个拧紧程序的特定拧紧次数或不同拧紧程序的序列。
将工具和任务分配给虚拟站点。此任务既可是拧紧程序、批次序列,也可是指定的数字输入(如从条形码枪输入)。
访问 STRwrench Web 界面
取下工具 USB 连接端口的盖子。
将工具连接到 PC 的 USB 端口。
打开 Web 浏览器,然后输入地址 169.254.1.1。
要以无线方式访问用户界面,请参阅配置无线客户端一节中的说明。
创建拧紧程序
转到主菜单中的拧紧。
选择 + 图标。
在选择操作模式窗口中,选择拧紧。
打开属性窗口,然后为特定工具输入有效的最大扭矩限值。输入 Enter。关闭属性窗口。
打开右侧的步骤窗格,然后拖放步骤以创建拧紧程序。
在适用的每个步骤中设置监视器和限制,然后按 Enter 键。
将任务分配给虚拟站点
转到主菜单中的集成控制器工具。
在虚拟站点 > 任务下,选择选择任务。
从列表中选择一个拧紧程序。
默认端口
功能 | 默认端口编号 | 方向 | 可配置 | 协议 |
ToolsTalk2 | 4551 | 输出 | 是 | TCP |
Toolsnet8 | 4552 | 输出 | 是 | TCP |
AC 许可管理器 | 7070 | 输出 | 是 | TCP |
Power Focus(输出) | 6677 | 输出 | 仅在 PF4000 上 | UDP |
Power Focus(输入) | 16000 | 输入 | 否 | UDP |
QAInspector | 6688 | 输入 | 否 | TCP |
开放协议 | 4545 | 输出 | 是 | TCP |
QATcalibrator | 60000 | 输入 | 否 | TCP |
远程日志记录 | 514 | 输出 | 是 | TCP/UDP |
使用拧紧选项卡
本节介绍了多步骤拧紧策略以及如何创建拧紧程序。
某些功能需要通过功能管理系统 (FMS) 分发的许可证。虽然可以在没有特定许可证的情况下配置特征,但分配和使用这些特征将需要在工具上安装正确的许可证。
多步骤拧紧策略
多步骤拧紧是分多步进行拧紧。步骤数和步骤类型因要进行的拧紧而异。多步拧紧程序可高度配置,包括监控功能和限制。总共 3 个步骤可以添加到一个多步骤程序中。
限制用于确保在出现意外情况时停止拧紧。例如,这些限制可测试确保未达到最大设定扭矩,或多步骤拧紧的部分不会花太长运行时间。每个步骤最多可各有 4 个限制。每个步骤有强制步骤限制和可选步骤限制。当将新步骤拖至多步骤程序时,将包含强制限制。
监控器用于验证是否根据规定进行拧紧。例如,它们可以为角度限值或扭矩限值。每个步骤最多可各有 8 个监控器。每个步骤有强制步骤监控器和可选步骤监控器。当将新步骤拖至多步骤程序时,将包含强制监控器。
多步骤配置用户界面
灰显的拧紧和多步骤程序表明它们是从 ToolsTalk 分发的全局程序。这些程序无法通过控制器 GUI 进行更改。全局程序只能通过 ToolsTalk 修改。有关更多信息,请参阅 ToolsTalk 用户文档。
配置多步骤程序的用户界面可划分成三个主区:
顶部有一个包含多步骤拧紧程序属性的下拉菜单。在这里可设置程序名、总程序监控器和验证等一般属性。
右侧有三个选项卡,包含可用于构建多步骤程序的步骤、监控器和限制。如要使用任何项目,只需选择相应的选项卡,然后将列表中的项目拖至拧紧区。将项目拖放到程序的开始和结束之间(用于步骤),或拖放到具体步骤的顶部(用于监控器和限制),视其功能而定。
用户界面的主区由拧紧区组成。该区包括拧紧程序中的所有步骤。
添加多步骤程序
在主视图上,选择拧紧选项卡。然后,在左侧选择多步骤程序库。
选择图形用户界面右上角的 + 图标。然后,选择所需的程序类型(拧紧或拧松)。
在拧紧区域拖放拧紧步骤、监视器和限制。
步骤只能放在程序的起点和终点之间,而监控器和限制只能放在步骤上。
功能
说明
开始和结束点

多步骤程序的开始和结束点。所有步骤必须放在这两个点之间。
添加步骤

从列表将步骤拖放到开始和结束点之间的目标位置。
移动步骤

点击并按住步骤并将它移动到目标位置
显示步骤属性

点击步骤以显示属性
关闭步骤属性

点击拧紧区的任意处以关闭属性菜单
删除步骤

打开步骤属性并点击菜单底部的删除
添加限制/监控器

从列表将限制/监控器拖放到相应的步骤。
移动限制/监控器

点击并按住图标(监控器使用复选标记,限制使用停止标志),将它拖放到相应的步骤
显示限制/监控器属性

点击限制/监控器图标以显示属性菜单
关闭限制/监控器属性

点击拧紧区的任意处以关闭属性菜单
删除限制/监控器

打开限制/监控器属性并点击菜单底部的删除
步骤错误

当验证错误出现在步骤中时,该步骤将被标记。注意,当步骤属性打开时,导致错误的参数也将被标记。
监控器/限制错误

当验证错误出现在监控器或限制中时,监控器或限制将被标记。注意,当监控器/限制属性打开时,导致错误的参数也将被标记。
禁止位置
当(步骤、监控器或限制的)具体位置不被允许时,占位符图标将不会显示。
删除多步骤程序
在拧紧菜单中,点击多步骤程序库。
在列表中点击想要删除的多步骤拧紧程序。
在程序中,点击左下方的删除。
点击弹出窗口中的是以确认您的选择。
拧紧程序属性
常规设置
参数 | 描述 |
|---|---|
名称 | 用户定义的多步骤程序名称。 |
螺纹方向 | 螺纹方向,顺时针或逆时针 |
程序开始 | 设置用于生成结果的扭矩水平。如果保留空白,每次启动工具时都将生成结果;否则仅从设置的扭矩水平生成结果。 |
追踪配置
绘制图配置可以在程序级别或每个步骤完成。默认配置是在程序级别设置的,可以根据需要在每个步骤中被覆盖。
在此,启用此功能允许在程序级别完成配置。
参数 | 描述 |
|---|---|
已启用 |
|
采样时间 | 从下拉列表中选择采样时间 (1 - 1000 ms)。 |
使用此绘制图记录,所有步骤中的采样率将不会相同,而是取决于每个步骤中的配置。这意味着绘制图被分成每个步骤一个绘制图。
一个绘制图中的最大样本数为 4096。
如果拧紧产生的数值数量超过 4096,则将进行下采样:通过从整个拧紧中移走每第二个绘制图样本,并以一半的分辨率继续记录,可以完成此操作。每次达到 4096 个采样限制时,都会重复此过程。
如果记录的总数超过 2048,则此过程将产生一个介于 2048 和 4096 个样本之间的绘制图。
如果达到了 4096 个样本的限制,将不再遵循配置的绘制图采样时间。取而代之的是,采样时间将加倍或翻两倍,具体取决于进行向下采样的次数。由于所有步骤均经过向下采样,因此步骤之间的关系仍然相同。如果一个步骤配置的采样时间是另一个步骤的两倍,那么无论最终采样发生了多少次,最终绘制图仍将是这种情况。
如果记录了不止 4096 个样本,将不再遵循配置的绘制图采样时间。取而代之的是,采样时间将加倍或翻两倍,具体取决于进行向下采样的次数。由于所有步骤均经过向下采样,因此步骤之间的关系仍然相同。如果一个步骤配置的采样时间是另一个步骤的两倍,那么无论最终采样发生了多少次,最终绘制图仍将是这种情况。
验证
在配置拧紧程序期间,将输入的值与刀具能力值进行比较,以防止参数超出选定的限值。如果使用了许多不同的工具,用户定义的最大值非常有用。
参数 | 描述 |
|---|---|
验证工具值 | 开启:将输入的值与工具功能值进行比较。 关闭:不执行验证。 |
工具 | 显示与之比较值的工具。 |
最大扭矩 | 允许用户使用模拟工具比较这些值。 |
拧紧步骤
拧紧步骤、监视器和限制的可用性取决于控制器上安装的许可证。
常规参数
以下步骤参数对于许多步骤类型都是通用的。参数在步骤属性窗口中设置,当在拧紧程序中选择一个步骤时显示该窗口。
参数 | 描述 |
|---|---|
名称 | 步骤名称。 |
步骤类别 | 通过选择步骤类别,NOK 拧紧将在事件结果视图中列出,同时列出相关的详细状态以及对应的多步骤错误信息。 |
TM - 手动拧紧至目标扭矩
此步骤引导用户操作,直到达到目标扭矩。
参数 | 描述 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
结束步骤时间 | 达到第三个百分比后,当扭矩低于旋入完成扭矩时开始。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
AM - 手动拧紧至目标角度
此步骤引导用户操作,直到达到目标角度。目标角度从触发扭矩测量。
参数
参数 | 描述 |
|---|---|
目标角度 | 角度目标。必须 > 0。 |
角度搜索限值 | 如果角度监视器的停止条件设置为峰值角度,则从测得的角度峰值向后开始,读取此处定义的角度窗口内的最大扭矩下的结果。最大值为 4°。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于旋入完成扭矩时开始。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
AM - 手动拧松至目标角度
此步骤引导用户拧松接头,直到达到目标角度。目标角度从触发扭矩测量。
参数
参数 | 描述 |
|---|---|
目标角度 | 角度目标值。 如果目标角度 = 0,则当扭矩值低于程序开始值时,停止拧松。 |
结束循环时间 | 达到目标角度后,当扭矩低于旋入完成扭矩时开始。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到目标角度值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
T&AM – 手动拧紧至目标扭矩和角度
此步骤引导用户操作,直至达到目标扭矩和目标角度。目标扭矩和目标角度必须设为 > 0。
参数 | 描述 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 必须 > 0。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于旋入完成扭矩时开始。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
T|AM – 手动拧紧以达到目标扭矩或角度
此步骤引导用户操作,直到达到目标扭矩或目标角度。目标扭矩和目标角度必须设为 > 0。
参数 | 描述 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 必须 > 0。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于旋入完成扭矩时开始。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
YM - 手动拧紧至屈服点
此步骤引导用户操作,直到达到接头的屈服点。
参数 | 描述 |
|---|---|
目标角度 | 如果 > 0,在检测到屈服点后,操作将继续,直到角度达到目标角度值。 如果 = 0,当检测到屈服点时,操作停止。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 默认值:5 秒。最小值:0.1。最大值:30 秒 |
线性斜率系数 | 定义曲线线性部分的关节刚度。它是指扭矩/角度斜率,单位为 Nm/°。 默认值:0.5。最小值:0.1(也适用于比率小于 0.1 的非常软的接头)。 如果选择的测量单位并非 Nm,则线性斜率系数必须始终转换为 Nm/°。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
RTP - 剩余扭矩/峰值
此步骤通过检测进一步旋转螺钉所需的峰值扭矩来指导用户测量接头上的剩余扭矩。
参数 | 描述 |
|---|---|
目标角度 | 如果 = 0,则剩余扭矩结果是检测到的峰值扭矩值,而与角度值无关。 如果 > 0,则剩余扭矩结果在指定目标角度值处(从触发扭矩开始)测得,而不是取峰值扭矩值。 |
触发器扭矩 | 定义开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 如果触发扭矩 = 0,其值被自动设为 smartHEAD 最小扭矩值。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 默认值:5 秒。最小值:0.1。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
RTA - 剩余扭矩/角度
此步骤通过检测扭矩/角度轨迹上的剩余点来指导用户测量接头上的剩余扭矩。
参数 | 描述 |
|---|---|
剩余角度阈值 | 当剩余扭矩低于分离点时,剩余扭矩的最大角度(从触发扭矩处测得)。 |
分离角度阈值 | 剩余扭矩的最大角度(从触发扭矩测得)。 |
触发器扭矩 | 定义开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 如果触发扭矩 = 0,其值被自动设为 smartHEAD 最小扭矩值。 |
棘轮作用时间 | 当扭矩低于旋入完成扭矩值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 默认值:5 秒。最小值:0.1。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
步骤监控器
拧紧步骤、监视器和限制的可用性取决于控制器上安装的许可证。
步骤监控器用于验证是否根据规范实现拧紧,比如角度限值或扭矩。每个步骤有强制步骤监控器和可选步骤监控器。当将新步骤拖至多步骤程序时,将包含强制监控器。可选监控器是灵活的,可按需要放在多步骤程序中。每个步骤最多可各有 8 个监控器。
下列监控器被自动添加到多步骤拧紧程序中添加的每个步骤。
步骤监控器 | 适用的步骤 |
|---|---|
角度 | 全部 |
扭矩 | 全部 |
A – 角度
在该步骤,监控器测量监控期间达到的最大角度,并检查它是否介于上限和下限之间。角度测量在监控开始处开始,如果指定的话,则在扭矩第一次在监控期间超过触发扭矩的点处开始。
参数 | 描述 |
|---|---|
停止条件 | 有两种停止条件类型:峰值角度,达到峰值扭矩时的角度(默认)。 |
触发器扭矩 | 角度测量在该触发器处开始。 |
下限 | 可接收的最小角度。 |
上限 | 最高可接受角度。 |
LD- 拧松检测
此监视器可用于检查扭矩和方向,以查看是否试图拧松。如果所施加的扭矩在与程序的配置螺纹方向相反的方向上大于拧松限值设置的值,则结果应报告为 NOK。
T - 扭矩
在该步骤,监控器测量监控期间达到的最大扭矩,包括任何过载,并检查它是否介于上限和下限之间。
参数 | 描述 |
|---|---|
停止条件 | 有两种停止条件类型:峰值扭矩(默认),峰值角度扭矩。 |
下限 | 可接受的最低扭矩。 |
上限 | 可接受的最高扭矩。 |
PrT - 有效扭矩
监视器计算规定角度窗口长度内的有效扭矩值,以便从拧紧的绝对峰值扭矩值中减去有效扭矩值。
计算有效扭矩值的角度窗口长度以起始角度距离(从贴合点反方向测量)中设置的角度开始,由系统实时自动计算。然后,角度窗口沿着与窗口长度中设置的角度相反的方向展开。根据为拧紧操作设置的使用值计算出的有效扭矩值可以是窗口长度期间测得的平均扭矩值或峰值扭矩值。如果补偿被设为开启,则从绝对峰值扭矩值中减去计算出的当前扭矩值,扭矩最终结果值是扭矩峰值与当前扭矩值之间的差值。
参数 | 描述 |
|---|---|
延迟监控 | 在其之后必须开始角度读数的角度值。 |
开始角度距离 | 从贴合点沿反方向跨越的角度值,定义了角度窗口长度的开始位置。 |
窗口长度 | 计算补偿值的角度间隔。 |
补偿 | 确定拧紧结果的方法:
|
上限 | 获得 OK 结果的扭矩上限值。 上限必须 > 0 |
下限 | 获得 OK 结果的扭矩下限值。 下限必须 ≥ 0 |
使用值 | 定义如何计算角度窗口长度间隔内有效扭矩值的方法:
|
此步骤监视器只能与 TM - 手动拧紧至目标扭矩拧紧步骤一起使用。
步骤限制
限制是预定义的条件,触发时会导致拧紧失败。
这些限制通过防止无效或过度拧紧作来帮助保持过程完整性。
Rh-重复拧紧
Rh-重复拧紧用于验证扭矩处于角度窗口范围内。如果测量的扭矩超过定义的扭矩下限,则扳手显示“接头已拧紧”错误消息。
参数 | 描述 |
|---|---|
角度窗口 | 角度窗口从步骤开始时测量。它必须小于定义的角度下限。 |
Ti – 最大时间
该限制进行时间检查。如果达到最大时间限制,扳手显示错误。
参数 | 描述 |
|---|---|
最大时间 | 如果超过此时间,扳手显示错误。 |
使用批次序列选项卡
批次序列用来按特定的顺序执行指定的拧紧次数。
拧紧顺序可按固定方案进行,也可留给操作员在无序方案中决定。在任何情况下,套筒或信号都可用来在工具与操作员之间通信。
设定批次,以使用同样的拧紧程序来执行指定的连续拧紧次数。必须为批次指定拧紧程序和批次容量,才可运行批次。
当操作需要批次/拧紧程序组合时,批次序列是一组有序的批次。
批次序列最多可由 99 个批次组成,批次容量最多为 250 次拧紧。批次序列中的批次按所列顺序执行,或者通过使用套筒选择器来决定运行哪个批次。
出现以下任何一种情况时,批次序列完成(且工具可能被锁定):
所有拧紧已完成,结果为 OK 或 NOK。
序列中止计时器信号终止任务。未执行拧紧被报告,结果为 NOK。
批次序列设置
批次序列菜单显示单个批次序列以及下列配置项目的详情:
姓名:序列名称和索引号。
设置:用于控制拧紧流程和顺序的参数。
批次配置:通过单个拧紧程序创建批次序列的功能。批次包括一个单一拧紧程序,它可以重复多次。
参数 | 描述 |
|---|---|
名称 | 批次序列名称由一个索引号与一些可选字符组成。索引位置无法更改。新配置将被提供最小的可用索引号。当使用来源和识别码数字成为任务选择过程的一部分时,索引号非常重要。 |
参数 | 描述 | 默认值 |
|---|---|---|
批次序列完成后,工具锁定 | 批次序列计数器等于批次序列大小时,批次序列完成。 开启:工具会被锁定,必须选择拧紧程序或批次序列,才可继续执行拧紧操作。 关闭:完成后,批次序列已准备好重复。 | 开启 |
自由顺序 | 否:如果已配置了批次来执行拧紧操作,则将按所列顺序执行这些经过配置的批次。如果已指定套筒,则在即将执行批次时,系统将会提示提供套筒。 是:经过配置的批次可按任意顺序执行。操作人员必须通过使用套筒选择器,向系统指明执行哪个批次。 当所有连接件均已成功完成时,批次会被视为“完成”。 | 序号 |
NOK 数增加 | 尽管拧紧操作被报告为 NOK,但仍然可增加批次计数值。要使最大连续 NOK 工作(可以拧紧单个螺栓的最大次数),必须将 NOK 增量设为否。如果将此参数设为是,将使序列进入下一次拧紧。 | 序号 |
最大连续 NOK 次数 | 最大连续不正常 (NOK) 拧紧次数是指批次中允许的连续不正常拧紧的最大次数。如果达到 Max consecutive NOK(最大连续 NOK 次数),显示事件Too many NOK tightenings (4020)(不正常拧紧次数过多 (4020))。 | 0 |
OK 拧松递减 | 当前活动批次内的计数器递减已完成的批次不能递减。 从不:设置关闭。当在活动批次中执行拧松时,计数器不递减。 始终:拧松时,如果最后一次拧紧正常,则活动批次中的计数器递减。 当最后拧紧 OK 时:无论之前的拧紧结果如何,在活动批次中执行拧松时计数器递减。 | 从不 |
顺序中断计时器 | 开启:选定批次序列可以在规定时间限制范围内中断 关闭:选定批次序列不能中断。 | 关闭 |
中止时间 | 时间以秒为单位。 | 10 s |
需要条形码 | 是:要启动批次序列,必须先扫描条形码。 否:启动批次序列不需要扫描条形码。 | 序号 |
参数 | 描述 |
|---|---|
拧紧程序 | 要在批次中使用的拧紧程序。 |
批次大小 | 批次将要执行的拧紧次数。 一个批次的最大拧紧次数为 99。 批次容量为 0 表示批次的拧紧次数无穷大。 |
识别码数字 | 在使用套筒选择器或端头配件工具时,这是用于激活批次的套筒位置或 TAG ID。 |
向批次序列添加新批次
转到主菜单中的批次序列。工作区显示批次序列的列表。
选择右上角的 + 图标。
为批次序列分配一个名称。
在设置中选择相关参数。
选择批次配置 > 编辑。
为批次选择一个拧紧程序。
输入批次大小,即批次将包含的拧紧次数。
输入一个可选的识别码。
在序列列表中的第一个空缺位置将分发新的批次序列。如果没有空缺的插槽,它将被放置在列表底部,并被分配可用的最小索引号。不能更改索引号来重新安排批次拧紧顺序。
删除批次序列中的批次
转到主菜单中的批次序列。工作区显示批次序列的列表。
选择要删除的批次序列。
在工作区的底部,选择删除按钮。
当批次从批次序列中删除时,索引序列被压缩和更新,不留空隙。已删除的批次序列的索引号将自动分配给下一个创建的序列。
使用来源选项卡
用作拧紧任务的外部信号在来源菜单中配置。来源为与虚拟站点相连的附件或同类附件。提供两类来源任务:
源拧紧任务:用于选择单个拧紧程序。
源批次任务:用于选择批次序列,即一系列拧紧程序。
来源拧紧
根据配置,源拧紧将特定的拧紧程序与一个或两个识别编号联系起来。当识别编号被发送到工具(通过外部数字信号),并在必要时使用了链接的端头配件工具 (TAG) 或套筒时,链接的程序将反复运行,直到不同的信号被发送(或连接端头配件工具,或拾取套筒)。不存在批次计数。
要将单独的列表链接到虚拟站点,必须将源任务分配给虚拟站点。转到主菜单中的集成控制器工具 > 虚拟站点,然后选择任务 > 更改任务。
源拧紧属性
参数 | 描述 |
|---|---|
名称 | 分配给来源拧紧的名称。 |
选择器模式 | 控制模式:外部来源通过请求标识符编号来选择拧紧程序。如果将识别编号关联到套筒选择器中的相应套筒,则可通过提起套筒来选择拧紧程序。 确认模式:外部信号不足以激活拧紧程序。在这种模式下,套筒或端头配件工具 (TAG) 的附加识别编号将与拧紧程序关联,必须在列表的附加栏指定。当(通过外部信号)请求一个识别编号时,必须使用套筒标识符栏中指定的编号所标识的套筒或 TAG 来激活相应的拧紧程序。 |
每个程序的最大连续 NOK 次数 | 开启:即使执行 NOK 拧紧操作,批次也会前进。 关闭:设置拧紧的最大连续 NOK 次数。只有执行成功的拧紧时,批次才会前进。 |
最大连续 NOK 次数 | 设置允许的连续 NOK 结果的数量。如果该值设置为 0,则不会检查 NOK 拧紧情况。当达到最大连续 NOK 时,工具锁定并停止序列执行。 |
批次控制 | 选择如何执行来源拧紧。 内部:配置来源拧紧要重复多少次。 外部:使用开放协议或外部协议来配置执行来源拧紧的次数。任何配置更改都将清除来源拧紧,从清洁且已知的状态重新开始(批次中的批次计数将重置为 0)。进行中的拧紧可在更改生效之前完成。 |
需要条形码 | 是:要启动拧紧程序,必须先扫描条形码。 否:启动拧紧程序不需要扫描条形码。 |
配置源拧紧
转到主菜单中的来源,然后在左侧窗格中选择拧紧。
选择右上角的 + 图标。
给来源拧紧分配一个名称并选择正确的选择器模式(控制或确认,视需要而定)。
可以设置每个来源拧紧或来源拧紧中包含的每个单独程序的最大连续 NOK 次数。根据需要将每个程序最大连续 NOK 次数参数设置为是或否:
要设置每个来源拧紧的最大连续 NOK 次数,请将每个程序的最大连续 NOK 次数设置为否。在最大连续 NOK 次数字段中设置该值。
要设置每个程序的最大连续 NOK 次数,请将每个程序的最大连续 NOK 次数设置为是。对于标识符选择器配置部分中的每个程序,请设置最大异常次数一列中的值。
需要条形码可根据源拧紧或源拧紧中包含的单个程序进行设置。
要根据源拧紧设置需要条形码,可将需要条形码设为是。需要扫描条形码才能启动源拧紧中的每个程序。
要根据程序设置需要条形码,可将需要条形码设为是。然后,对于标识符选择器配置部分中的每个程序,在需要条形码栏中选择否或是,以分别禁用或启用各个程序的需要条形码功能。
在创建新的来源拧紧时,默认只提供一个可编辑的标识符号。在屏幕底部,选择 + 图标以添加更多。
给每个项分配一个标识符编号。
要激活程序,与拧紧程序关联的识别编号必须与外部数字信号(开放协议)发送的 ID 相对应。
如果确认模式选择为选择器模式,则在套筒标识符栏中输入用于拧紧程序的端头配件工具 (TAG) 或套筒的附加标识符(最大值:32)
选择一行并从拧紧程序列表中选择,选择与每个标识符编号相关联的拧紧程序。
来源批次
配置来源批次
转到主菜单中的来源,然后在左侧窗格中选择批次序列。
选择右上角的 + 图标。
为来源批次分配一个名称。
如果扫描新的标识符字符串中止之前扫描,将中止新的标识符设为是。
选择标识符方法(文本的字符串或数字值的数字)
如果标识符方法设置为字符串,继续以下步骤:
如果需要以任意顺序扫描字符串,将自由顺序设置为开。
标识符字符串最多可以由四个不同的字符串组成。当自由顺序设置为关时,必须以特定顺序扫描字符串,系统才能识别字符串。
如有必要可选择标识符字符串配置部分的 + 图标添加标识符字符串。
为需要更改的标识符字符串选择名称标签。在对话框中,可以为字符串指定以下属性:
名称 - 字符串的名称
长度 - 字符串的长度。有关连接字符串的更多信息,请参见组合标识符字符串。
有效位 - 字符串中的相关位置。有关有效位的更多信息,请参见要在条形码字符串中读取的有效位。
保存位 - 需要由系统记录的位置。有关已保存位置的更多信息,请参见已保存位置。
字符串属性窗口中的 ID 编号 (1−4) 无法修改,只能用于在不同字符串之间导航。
将自由顺序设置为开时可能发生错误,不同字符串的长度出现重复。此时,扫描顺序不会启用拧紧程序。如需修复该错误,将自由顺序设置为关,或者调节字符串长度。
在标识符字符串配置字段的底部选择编辑。
在编辑窗口中,指明应将哪些字符串(在字符串包含列中)与哪些批次序列(在激活列中)关联在一起。选择底部的 + 图标以添加更多字符串。
键入“字符串中包含”时可使用通配符。通配符可以用于字符串中的任何位置。模糊匹配结果不会激活批次序列。
通配符是 .(句号)
有效位
有效位的作用是,将字符串组合成您预定义的字符串时,定义读取条码字符串中的哪个字符。有效位的数量必须与预定义字符串中的字符数量相同。
条形码字符串中要读取的重要位置
条形码字符串中的位与 1 到 1024 之间的一个数字相关。字符串的第一位是 1,最后一位是 1024。
分辨位必须根据下表中给出的规则规定。
说明 | 分辨位 | 有效配置 | 与预定义字符串匹配的条码字符串 |
|---|---|---|---|
顺序排列分辨位 | 1,2,3,7,8 | 确定 | ABCGH |
以可选顺序排列分辨位 | 7,1,2,3,8 | 确定 | GABCH |
数字范围 | 1-3,7-8 | 确定 | ABCGH |
组合标识符字符串
用于匹配的标识符字符串由最多四个来自工厂管理系统的字符串组成,或者由最多四个需要组合成一个字符串的条形码枪输入组成。
+ 和 - 按钮管理组合的字符串数。提供以下参数:
参数 | 说明 |
|---|---|
名称 | 字符串应为指定名称。 |
长度 | 字符串的长度应已知且须输入。这对能够组合正确的字符串标识符十分重要。 |
分辨位 | 组合字符串中的分隔号位置或范围(由连字符分开)供匹配使用。 |
已保存的位置 | 将被保存到结果的字符串中的逗号分隔位置或范围。 |
每行中的开始和结束参数定义各字符串在匹配过程的接下步骤中使用的组合字符串标识符。
任务选择过程使用标识符字符串作为输入的第一部分用于定义字符串中将要使用的位置:
输入有效位以定义标识符字符串中将用于匹配的位置。此类位置必须以逗号分隔或按范围排列。
已保存的位置
保存位是一个字段,其中用户可以指明保存来源批次中使用的每个字符串哪些部分,以及如何在日志中进行反映。在此字段中,指明需要在字符串中保存的位置。位置可能只构成整个字符串的一部分。如果字段留空,将保存整个(相连)字符串。下表只显示保存位组合的部分示例。
保存位值用逗号分开(不带空格),范围使用连字符指明。
标识符字符串 | 位置 |
|---|---|
字符串 1:1234567 | 1-7 |
字符串 2:abcdef | 8-13 |
字符串 3:GHIJKL | 14-19 |
字符串 4:890 | 20-22 |
已保存的位置 | 保存结果 |
|---|---|
(空) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 将自动变更为:1-12,19-21 | 1234567abcdeL89 |
条形码扫描信息
当 STRwrench 与配置了标识符方法设为字符串的源批次一起工作时,扳手的 EHMI 会提供有关扫描的条形码的信息。
每扫描一次条形码,EHMI 上就会出现以下项目:
扫描的字符串。
OK / NOK:如果扫描的条形码被识别为源批次中包含的标识符字符串之一,则显示 OK 字样。如果无法识别,则显示 NOK 字样。
扫描计数器:如果批次源中包含不止一个标识符字符串,则计数器将跟踪标识符字符串总数中已扫描的条形码。
使用配置选项卡
该工具及其附件的配置在配置菜单中进行。
工具配置
以下部分描述如何配置不同的工具功能,例如 LED 和按钮。
工具 LED
工具 LED 有以下功能:
LED 环由 STRwrench 手柄上的一圈径向梯度 LED 组成。LED 行为可被配置为根据颜色和行为向操作员提供特定的输出消息。
结果指示器使用 LED 环在拧紧或松开结束时向操作员输出拧紧结果的状态。
配置 LED
转到主菜单中的配置,然后选择工具配置 > 编辑。
在工具 LED 类别中,选择编辑。
设置适用的参数。
工具 LED 进度
LED 环上的径向梯度 LED 的行为可以配置为传达拧紧操作的进度:当达到与三个配置阈值对应的扭矩或角度值时,三个径向梯度 LED 依次变为绿色。阈值以百分比定义,可以配置必须根据哪个值计算阈值:
对于将扭矩设置为控制值的拧紧策略,可根据最小扭矩值或为操作定义的目标扭矩值计算阈值。
对于将角度设置为控制值的拧紧策略,可根据最小角度值或为操作定义的目标角度值计算阈值。
参数 | 描述 |
|---|---|
绿色 LED 阈值 | 此参数定义了计算三个进度阈值的方法。选择其中一个可用选项:
|
第一个阈值 | 键入当达到设定的绿色 LED 阈值的百分之几时,第一个径向梯度 LED 必须亮起。 |
第二个阈值 | 键入当达到设定的绿色 LED 阈值的百分之几时,第二个径向梯度 LED 必须亮起。 |
第三个阈值 | 键入当达到设定的绿色 LED 阈值的百分之几时,第三个径向梯度 LED 必须亮起。 |
为第一个阈值、第二个阈值和第三个阈值设置的值必须加起来等于 100%。
结果指示灯
结果指示灯配置工具 LED 环的行为方式,以指示拧紧结果状态和指示灯持续时间。可从快捷菜单选择预配置的方式。此方式可以为不同拧紧结果的组合。
信号 | 描述 |
|---|---|
红色:高:黄色:低 |
|
红色:NOK:黄色:低 |
|
红色:NOK | 如果拧紧结果超出下限和上限值范围(默认行为),LED 环将变为红色。 |
持续时间
持续时间决定了拧紧完成后结果指示的持续时间。
使用开关选择以下两个选项之一:
参数 | 描述 |
|---|---|
至下一次拧紧 | 结果指示一直持续到下一次拧紧开始(默认行为)。 |
时间 | 拧紧完成后,结果指示将在设定的持续时间内保持亮起。 默认值:5.0 s;值范围:0.1 s - 60.0 s。 |
常规设置
项目 | 描述 |
|---|---|
前置 LED | 开启:当按下专用按钮时,前 LED 亮起。 关闭:前置 LED 将始终熄灭。 |
TAG 选择 | 开启:根据在批次序列/来源拧紧/来源批次中配置的 TAG 编号选择拧紧程序/批次或批次序列。 关闭:该工具不选择拧紧程序/批次或批次序列。 |
TAG | 开启:显示 TAG 信息,并可在集成控制器工具 > 工具菜单中进行编辑。 关闭:不显示 TAG 信息。 |
蜂鸣器 | 开启:音频信号设备将始终开启。 关闭:音频信号设备将始终关闭。 |
键盘源 | 开启:可以直接从工具的 EHMI 中选择、启动和停止拧紧程序和批次。 关闭:EHMI 只能用于浏览可用菜单和确认 EHMI 屏幕上的必要对话框。 |
振动 | 开启:振动设备将始终开启。 关闭:振动设备将始终关闭。 |
松动预紧检查 | 开启:在开始拧紧之前,会检测到已经拧紧的接头意外松动。 关闭:功能被禁用。 |
智能调零 | 开启:如果 STRwrench 在调零过程中检测到任何移动,则调零程序将重新开始。 关闭:如果 STRwrench 在调零过程中检测到任何移动,则调零程序将不会重新开始。 |
仪表指示器 | 开启:在拧紧过程中,EHMI 上的仪表指示器会提供正在进行的拧紧的进度提供视觉反馈。根据操作设置,仪表指示器可以显示扭矩进度、角度进度或这两者。 关闭:在拧紧过程中,EHMI 上仅显示扭矩和/或角度的数值,以反馈正在进行的拧紧的进度。 |
EHMI
EHMI = 嵌入式人机接口。它有一个图形显示和五个选择按钮。其界面是 STRwrench 固件软件 Web 用户界面的子集,允许用户选择拧紧程序、批次序列,并查看工具硬件信息和当前无线配置。
有关h EHMI 操作,请参见产品说明、EHMI 操作。
配置套筒选择器
套筒选择器是一个带有 LED 的套筒托盘,可帮助操作员为拧紧过程(例如,批次序列)选择正确的套筒。在使用多个拧紧程序时,使用选择器非常方便。抬起套筒时,相应的拧紧程序会被选中。
可以将多个套筒选择器与虚拟站点相连。
要将套筒选择器连接到虚拟站点,请转到集成控制器工具 > 虚拟站点 > 附件,然后选择选择附件。
要设置套筒选择器,请参阅套筒选择器产品说明。
转到主菜单中的配置,然后在左侧窗格中选择套筒选择器。
为配置分配一个名称。
选择编辑。
选择添加或删除以获取正确的套筒槽数。选择要激活的所有插槽(以蓝色表示)。
如果要通过外部系统控制套筒选择,请将控制设置为外部。
产品基础教程
https://www.youtube.com/watch?v=cmU9pYL-kL4
配置 I/O 扩展模块
要设置套筒选择器,请参阅 I/O 扩展模块产品说明。
转到主菜单中的配置,然后在左侧窗格中选择 I/O 扩展模块。选择编辑。
显示两个列表,一个代表输入,一个代表输出。
要将通道设置为输入,请在输入列表中选择所需通道。在出现的列表中选择信号类型。
要将通道设置为输出,请在输出列表中选择所需通道。在出现的列表中选择信号类型。
配置多层警示灯
多层警示灯可以配置为显示来自工具的 I/O 信号。
排灯可以自定义如下:
一排四个灯。一个可选的灯可以添加到这排。您还可以自定义灯光的顺序和颜色。
A和B两个位置,可以使用指示灯或开关进行定制。
蜂鸣器放置在箱子的一侧,固定频率为3000Hz。蜂鸣器可以配置为激活任何拧紧工具信号。
两个外部输出,两个外部输入和一个用于外部电源的连接器。
要设置多层警示灯,请参阅 CAN 转换器产品说明。
转到主菜单中的配置,然后选择多层警示灯。选择编辑。
对于每个多层警示灯位置,选择灯的颜色、信号类型和持续时间。
对于位置 A-B,选择灯、按钮或开关的类型,然后选择信号类型。
根据需要配置蜂鸣器和外部数字输入和输出。
使用集成控制器工具选项卡
虚拟站
虚拟站点是控制器的软件抽象概念。STRwrench 有一个带有一个已连接的虚拟站点的集成控制器。可以根据需要将各种配置分配给虚拟站点。可以选择任务、分配附件配置以及设置通信协议参数。
选定的任务可以是运行一个拧紧程序、运行一个批次序列或者使用来源菜单中配置的来源启用此任务。可以监视任务,并且任务结果可以与操作中可能发生的任何事件一起显示。
更改许可证类型
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在许可证字段中选择虚拟站点类型。
从列表中选择一种新类型。
如果适用,请选择功能 > 编辑,为单个功能添加许可证。
产品基础教程
https://www.youtube.com/watch?v=HanD0wI-w9k
将任务分配至虚拟站点
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。在任务菜单中选择选择任务或更改任务。
选择以下选项卡之一:
拧紧程序:显示工具中可用的拧紧程序列表。
批次:显示工具中可用的批次序列列表。
来源:显示工具中可用的来源任务列表。
从列表中选择一个任务。
任务名称在任务字段中更新。
来源部分详细介绍了使用来源和标识符编号/标识符字符串进行的任务选择。
开放协议
在虚拟站点菜单中的协议下,有一个可用通信协议的列表,具体视当前使用的许可证而定。Open Protocol 适用于所有许可证。
要通过 Open Protocol 访问功能,必须为虚拟站点定义一个唯一端口。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
将 Open Protocol 开关设为开启。
输入服务器端口号。
输入通信超时值,以秒为单位(15~60 之间)。
输入 PLC 索引值。
PLC 索引用于映射共享存储器中要写入 Open Protocol 命令的位置。默认值为 1,但可以输入数值 1 到 6。
当与客户连接丢失时,选择要应用的操作。
当出现连接错误时,断开设置会控制应用的操作:
无 - 拧紧程序如常继续。
锁定工具高态有效 - 工具在正常完成当前拧紧操作后锁定。
未分配任务 - 在完成进行中任务后终止拧紧。但不适用于常规拧紧程序或批次序列,其中将在完成操作后删除任务。
始终锁定工具 - 工具在完成当前拧紧操作后锁定,无论结果如何。
根据要求,将使用旧有计数器设置为是或否。
通过将计数器设置为“是”,旧有计数器将按顺序对所有拧紧计数,并将该数字输出到辅助系统。
根据要求,将 MID0015 Echo 选定的识别编号设置为是或否。
通过将计数器设置为“是”,控制器将在 MID0015 PSET_SELECTED 中响应选择的识别编号值。否则,将发送实际的拧紧程序 ID。
选择应用。
选择附件
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在附件字段中选择选择附件。
选择要连接的附件:套筒选择器、多层警示灯或 I/O 扩展模块。
在配置列(左)中,选择要与附件一起使用的配置。
在连接的附件列(右)中,选择要使用的附件。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在附件字段中选择选择附件。
在已分配的附件列表中,选择要删除的附件旁的 - 图标。
工具
查看工具信息
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开工具信息字段以查看以下信息:
信息
描述
型号
控制器型号名称。
序列号
当为了获得正确的备件清单或维修说明时,可能需要控制器的序列号。
产品号
控制器的产品编号。
TAG 信息
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开 TAG 信息字段。系统将显示以下信息:
参数
描述
标签 ID
TAG 编号。
扭矩校正系数
为 TAG 定义的扭矩校正系数。
角度校正
为 TAG 定义的角度校正。
额定扭矩
定义角度校正的扭矩。
维护
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开维护字段。系统将显示以下信息:
参数
描述
传感器是否过载?
是 - 传感器过载。
否 - 传感器未过载。
最大扭矩值
传感器测得的最高扭矩输出。
最大扭矩日期
传感器测量到最大扭矩输出的日期和时间。
成功拧紧次数
已完成拧紧的次数。
SmartHEAD 角度校正系数为传感器容量的 12.5%
扳手弯曲引起的角度校正系数。
用于 smartHEAD 的角度校正系数。请注意,此系数与 smartHEAD 本身的扭力有关。使用扳手加长件时,必须算出其角度校正系数并添加到端头配件工具或程序参数中。SmartHEAD 角度校正系数为传感器容量的 25%
扳手弯曲引起的角度校正系数。
用于 smartHEAD 的角度校正系数。请注意,此系数与 smartHEAD 本身的扭力有关。使用扳手加长件时,必须算出其角度校正系数并添加到端头配件工具或程序参数中。SmartHEAD 角度校正系数为传感器容量的 75%
扳手弯曲引起的角度校正系数。
用于 smartHEAD 的角度校正系数。请注意,此系数与 smartHEAD 本身的扭力有关。使用扳手加长件时,必须算出其角度校正系数并添加到端头配件工具或程序参数中。SmartHEAD 角度校正系数为传感器容量的 100%
扳手弯曲引起的角度校正系数。
用于 smartHEAD 的角度校正系数。请注意,此系数与 smartHEAD 本身的扭力有关。使用扳手加长件时,必须算出其角度校正系数并添加到端头配件工具或程序参数中。传感器校准日期(顺时针)
上一次传感器顺时针方向扭矩校准的日期。
陀螺仪校准日期(顺时针)
上一次陀螺仪顺时针方向扭矩校准的日期。
传感器校准日期(逆时针)
上一次传感器逆时针方向扭矩校准的日期。
陀螺仪校准日期(逆时针)
上一次陀螺仪逆时针方向扭矩校准的日期。
下次校准日期
下次校准到期日。
smartHEAD 信息
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开 smartHEAD 信息字段。系统将显示以下信息:
参数
描述
型号
smartHEAD 型号名称。
最大扭矩
smartHEAD 可用于拧紧的最大扭矩。
序列号
当为了获得正确的备件清单或维修说明时,可能需要 smartHEAD 的序列号。
产品号
smartHEAD 的产品编号。
IAM
智能应用模块 (IAM) 是工具中的非易失性存储。存储模块包括所有工具程序、配置和结果。
转到主菜单中的集成控制器工具,然后选择 IAM。
为工具应用一个名称。
固件版本
可以同时在工具中安装两个固件版本。在多个工具上执行升级时,安装第二个固件版本非常有用。当生产准备好切换到升级的固件时,新版本的激活从 STRwrench web 用户界面完成。
更改固件版本不会转移工具配置或拧紧程序。
软件激活
该工具可以存储两个已安装的固件版本。通过使用软件激活,可以选择要使用的固件版本。
在整个过程中,请确保将电池连接到工具。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择软件。
在软件激活窗口中选择当前或已存储的。
该工具将自动重启,以使激活生效。
更新软件版本
在整个过程中,请确保将电池连接到工具。
如果要安装的软件包与工具硬件不兼容,软件更新将被取消。将显示一条警告消息,指出导致取消的硬件部分。
有关当前工具硬件的信息,请转到集成控制器工具 > 硬件。
转到集成控制器工具菜单,然后在左侧窗格中选择软件。
转到软件更新字段,然后选择浏览。
浏览并选择包含适用软件的 zip 文件,然后按照说明完成安装。
产品基础教程
https://www.youtube.com/watch?v=-Vq6uKaKfcA
导出和导入配置
导出和导入功能用于导出事件和拧紧结果以在外部程序中进行分析,并允许在工具之间传输拧紧程序、批次和工具配置。
导出功能用于:
导出拧紧结果和事件用于进一步处理。
导出日志文件,以用作 Atlas Copco 服务工程师的调试援助。
导出可用于将设置复制到另一个工具的工具配置。
转到主菜单中的集成控制器工具。在左侧窗格中选择导出/导入。
从工具中选择要导出的内容:所有信息或设置和配置。
选择设置和配置时,不会将包含结果或事件的文件导出到存档中。使用此设置,导出所需的时间更少。
选择导出。系统将显示一条选择保存或检索导出文件位置的提示信息。
转到主菜单中的集成控制器工具。在左侧窗格中选择导出/导入。
选择导入。在使用导入功能时,拧紧程序、批次、附件和工具的所有设置都将更新为导入文件的设置。但是,不会导入网络、PIN 以及结果和事件的设置。
在对话框中选择继续以开始导入。
导出的信息和文件格式
导出的文件是包含以下文件的压缩文件存档:
所有信息
STRwExport_<datetime>_Events.csv
ExportInfo.txt
settings/settings.bin
atlas_sys_i.zip
atlas_plc.zip
jsonConfigurations.zip
设置和配置
ExportInfo.txt
settings.zip
jsonConfigurations.zip
文件 | 描述 |
|---|---|
STRwExport_<datetime>_Events.csv | 以分号分隔的文件,其中包含以下信息:
|
ExportInfo.txt | 有关工具设置和工具软件的信息。 |
settings/settings.bin | 一个包含所有拧紧程序和批次设置、配件配置和工具设置的二进制文件,例如:语言、扭矩单位、日期和时间,以及结果视图。 |
atlas_sys_i.zip | 来自 IT 应用程序的日志文件。 |
atlas_plc.zip | PLC 配置。 |
jsonConfigurations.zip | 多步骤拧紧和拧松程序。 |
根据 STRwrench 软件中的语言设置,导出的 .csv 文件使用不同的字符来分隔字段。根据计算机中的语言设置,打开导出的 .csv 文件时可能会出现格式问题。为避免出现问题,请始终将工具中使用的语言与计算机的语言相匹配。
有关 STRwrench 软件的语言格式详细信息,请参见下表:
语言 | 日期/时间 | 字段分隔符 | 数字格式 |
|---|---|---|---|
英语 (en_US) | MM/dd/yyyy hh:mm:ss | , | 123.456 |
捷克语 (cs_CZ) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
德语 (de_DE) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
西班牙语 (es_ES) | dd/MM//yyyy hh:mm:ss | ; | 123,456 |
法语 (fr_FR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
韩语 (ko_KR) | yyyy-MM-dd hh:mm:ss | , | 123.456 |
意大利语 (it_IT) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
日语 (ja_JP) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
葡萄牙语 (pt_BR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
俄语 (ru_RU) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
瑞典语 (sv_SE) | yyyy-MM-dd hh:mm:ss | ; | 123,456 |
中文 (zh_CN) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
连接到外部控制器
为了覆盖需要物理控制器的应用,STRwrench 可以连接到 Power Focus 8、Power Focus 6000、STpad 或 STpalm。
需要这样做的应用可以是,例如:
当使用现场总线时
当使用有线站点附件时(多层警示灯、操作员面板等)
当使用 I/O 时
当需要控制器作为物理集线器和缓冲区时
转到主菜单中的集成控制器工具,然后在左侧窗格中选择集成控制器。
将集成控制器设置为关闭以便将 STRwrench 连接到外部控制器。等待工具重启。
当集成控制器被禁用时,STRwrench Web 用户界面会显示一个缩小版菜单,由三个选项卡组成:配置、工具管理和设置。
在设置中,选择 STRwrench 连接 > 拧紧管理器,然后选择要连接 STRwrench 的外部控制器:
Power Focus,将 STRwrench 连接到 Power Focus 8 或 Power Focus 6000。
点击 STRwrench 或 STwrench 定义 Power Focus 将与连接的 STRwrench 关联的序列号:
STwrench:Power Focus 将 smartHEAD 的序列号与连接的 STRwrench 关联。
STwrench:Power Focus 将 STRwrench 控制器的序列号与连接的 STRwrench 关联。
QA Inspector 将 STRwrench 连接到 Stpad 或 STpalm。
选择要在 STRwrench 和所选外部控制器之间建立的连接类型:
蓝牙。
Wi-Fi。
如果 Wi-Fi 连接到 Power Focus,则将显示两个额外的参数:
服务器端口:此参数不可编辑。
服务器主机:输入 Power Focus 的 IP 地址。
如果选择 Wi-Fi 连接到 QA Inspector,则将显示一条额外的参数:
服务器端口:此参数不可编辑。
选择应用然后等待 STRwrench 重启。
在外部控制器中,STRwrench 现在将显示在专用菜单部分。
有关外部控制器的进一步配置,请参阅 Power Focus 8 用户指南、Power Focus 6000 用户指南、STpad 配置手册或 Stpalm 配置手册。
将 STRwrench 与用于蓝牙连接的外部控制器配对
为了在 STRwrench 与外部控制器之间设置蓝牙连接,工具必须先与外部控制器配对。
配对过程中,STRwrench 扳手上不得运行任何拧紧程序。如果 STRwrench 开启,在进行配对之前,您可以将其关闭并再次打开,或者断开 smartHEAD 并将其重新连接到扳手,以使工具进行调零。
将 STRwrench 与 Power Focus 配对
开始配对过程之前:
确保工具和控制器均已启用蓝牙。
确保有可用的配对插槽。
如果可能,保持工具与控制器之间无任何障碍。
确保此时没有其他工具正在与控制器配对。
在主视图上,点击“工具”选项卡。然后,点击右上角的配对图标。

在配对对话框的顶部,选择 STRwrench。
开启 STRwrench,或者如果已经开启,将 smartHEAD 连接到设备。
扳手显示屏上的进度条开始加载后,立即在 STRwrench 键盘上执行配对序列:
如果使用的 STRwrench 是第一代键盘版本,则按下图所示顺序按键:

如果使用的 STRwrench 是新键盘版本,则按下图所示顺序按键:

当蓝牙配对消息出现在扳手显示屏上时,点击 Power Focus 配对窗口中的蓝牙。
配对过程出现以下任意结果后终止:
配对成功 - 工具与控制器使用选定通道配对完成。
配对不成功 - 这可能是由以下任一原因造成:
未在配对过程中检测到工具。确保工具处于信号范围内以及处于配对模式下,然后点击关闭,再试一次。
在配对过程中找到多个工具。确保没有其他工具处于配对模式下,然后点击关闭,再试一次。
配对已在进行中。请确保控制器上没有执行任何其他配对过程,然后点击关闭,再试一次。
配对失败。点击关闭,再试一次。
如需了解详情,请参阅 Power Focus 8 用户指南和 Power Focus 6000 用户指南。
将 STRwrench 与 Stpad 配对
在 STpad 主页页面中,点击测量设备。
在测量设备页面的右上角,点击添加。
在测量设备类型窗口中,点击 STRwrench。
选择 STRwrench 后,添加 STRwrench 页面的连接类别自动显示。
配对过程完成后,常规类别将自动填充。
在连接类别中,配置以下参数:
连接类型:在下拉列表中,选择 IRC-B。
曲线读取:在下拉列表中,为 STRwrench 曲线读数选择以下选项之一:
始终:始终读取曲线。
仅 NOK:仅读取 NOK 曲线。
从不:从不读取曲线。
剩余双重结果:选中复选框以保存剩余点和峰值点的扭矩/角度值。
如果未选中该复选框,则仅保存剩余点的扭矩/角度值。剩余最大扭矩行为:选择复选框,当剩余点在限值范围内而峰值点超过最大扭矩时,结果为 Not OK。
如果未选中该复选框,则当剩余点在限值范围内且峰值点超出最大扭矩时,测试的结果状态为 OK。
在添加 STRwrench 页面的右上角,点击配对。
可以保存新添加的设备,稍后再执行配对过程。为此,请点击添加 STRwrench 页面右上角的保存。
按照配对说明窗口中显示的说明操作:
开启 STRwrench,或者如果已经开启,将 smartHEAD 连接到设备。
扳手显示屏上的进度条开始加载后,立即在 STRwrench 键盘上执行配对序列:
如果使用的 STRwrench 是第一代键盘版本,则按下图所示顺序按键:

如果使用的 STRwrench 是新键盘版本,则按下图所示顺序按键:

当蓝牙配对消息出现在扳手显示屏上时,点击 STpad 配对说明窗口中的配对。
当配对完成消息出现在 STpad 配对窗口上时,点击确定。
在添加 STRwrench 页面的右上角,点击保存。
配对过程结束时,蓝牙配对完成消息出现在 STRwrench 显示屏上。按选择键退出消息屏幕。
将 STRwrench 与 Stpalm 配对
在 STpalm 工具栏中,点击菜单图标 (
 )。然后,点击测量设备。
)。然后,点击测量设备。在测量设备页面中,点击添加图标 (
 )。
)。在测量设备类型窗口中,点击 STRwrench。
在添加 STRwrench 页面的连接类别中,配置以下参数:
连接类型:在下拉列表中,选择 IRC-B。
曲线读取:在下拉列表中,为 STRwrench 曲线读数选择以下选项之一:
始终:始终读取曲线。
仅 NOK:仅读取 NOK 曲线。
从不:从不读取曲线。
残差双重结果:选中复选框以保存残差点和峰值点的扭矩/角度值。
如果未选中该复选框,则仅保存剩余点的扭矩/角度值。剩余最大扭矩行为:选择复选框,当剩余点在限值范围内而峰值点超过最大扭矩时,结果为 Not OK。
如果未选中该复选框,则当剩余点在限值范围内且峰值点超出最大扭矩时,测试的结果状态为 OK。
在添加 STRwrench 页面的右上角,点击更多图标 (
 ),然后点击配对。
),然后点击配对。可以保存新添加的设备,稍后再执行配对过程。为此,请点击添加 STRwrench 右上角的保存图标 (
 )。
)。 按照配对说明窗口中显示的说明操作:
开启 STRwrench,或者如果已经开启,将 smartHEAD 连接到设备。
扳手显示屏上的进度条开始加载后,立即在 STRwrench 键盘上执行配对序列:
如果使用的 STRwrench 是第一代键盘版本,则按下图所示顺序按键:

如果使用的 STRwrench 是最新键盘版本,则按下图所示顺序按键:

当蓝牙配对消息出现在扳手显示屏上时,点击 STpalm 配对说明窗口中的配对。
当配对完成消息出现在 STpalm 配对窗口上时,点击确定。
在添加 STRwrench 页面的右上角,点击保存图标 (
)。
在配对过程结束时,STRwrench 显示屏上显示蓝牙配对完成消息。按选择键退出消息视图。
使用设置选项卡
网络配置
可以将工具设置为使用 IPv4 协议从局域网 (LAN) 上的 Web 浏览器进行无线访问。
取下工具 USB 连接端口的盖子。
将工具连接到 PC 的 USB 端口。
打开 Web 浏览器,然后输入地址 169.254.1.1。
配置蓝牙
转到主菜单中的设置,然后在左侧窗格中选择网络。
在蓝牙字段中,选择编辑。
将启用设置为开启。
配置通道
转到主菜单中的设置,然后在左侧窗格中选择网络。
在通道字段中,选择频率(2.4 Ghz 或 5 GHz),并选择编辑。
选择启用或禁用通道。
配置无线客户端
转到主菜单中的设置,然后在左侧窗格中选择网络。
转到无线客户端并选择编辑。
编辑常规设置。
将启用设置为开启。
根据配置将 DHCP 设置为开启或关闭。如果设为关闭,请向本地系统管理员询问正确的设置。
设置 IP 地址、子网掩码和网关。
输入网络名称 (SSID)。
编辑安全设置。
选择模式,然后从列表中选择一个安全模式。
根据需要编辑安全设置。可用设置取决于所选的模式。
安全设置 设置
说明
模式
禁用
WPA2 个人
WPA2 企业
EAP 方法
PEAP
LEAP
TLS
TTLS
FAST
安全密钥
设置字母数字密码。
标识
设置工具标识。
用户名称
设置用户名称。
密码
设置密码。
CA-cert
使用浏览按钮选择 CA 证书。可以是 PEM 格式,也可以是二进制 (DER) 格式。
Client-cert
使用浏览按钮选择客户端证书。可以是 PEM 格式,也可以是二进制 (DER) 格式。
私钥
使用浏览按钮选择私钥。可以是 PEM 格式,也可以是二进制 (DER) 格式。
私钥密码
设置用于私钥的密码。
快速 PAC
设置受保护的访问凭证 (PAC)。
MSCHAPv2
将 MSCHAPv2 设置为开启或关闭。
AES/CCMP
将 AES/CCMP 设置为开启或关闭。
如果不确定,将 AES/CCMP 和 TKIP 设置为开启并向本地系统管理员询问详细信息。
TKIP
将 TKIP 设置为开启或关闭。
如果不确定,将 AES/CCMP 和 TKIP 设置为开启并向本地系统管理员询问详细信息。
根据需要编辑可选设置。
可选设置 设置
说明
主机名
设置工具的主机名。
信号强度低于此值 (dBm) 时发出警告
设置工具发出警告的信号强度。
漫游阈值 (dBm)
设置工具应连接(漫游)到信号更好的接入点的信号阈值。
激活扫描间隔 (s)
在信号强度较差时,设置扫描之间的时间(以秒为单位),如漫游阈值 (dBm) 中定义。工具会加大力度寻找接入点。
被动扫描间隔 (s)
在信号强度较好时,设置扫描之间的时间(以秒为单位),如漫游阈值 (dBm) 中定义。
连接到隐藏的 Wi-Fi 网络
如果网络 (SSID) 已隐藏,将此值设置为开启。
选择应用。
工具将建立与网络的无线连接,并通过工具的蓝色连接 LED 指示灯发出稳定的光来指示。
要通过无线方式访问用户界面,请在 Web 浏览器中键入 IP 地址。
产品基础教程
https://www.youtube.com/watch?v=IAhVDKSyFgY
将工具配置为无线接入点
如果先前已经在无线客户端模式下配置了多个通道,启用无线 AP 模式将更新通道列表,使其仅包含适用于无线 AP 模式的当前/默认通道。
转到主菜单中的设置,然后在左侧窗格中选择网络。
在无线 AP 字段中,选择编辑。
将启用设置为开启。
输入本地系统管理员提供的必需信息:
IP 地址
子网掩码
网关
要分配 IP 地址,请将 DHCP 服务器设置为开启,然后输入 IP 范围开始和 IP 范围停止。
输入网络名称 (SSID)。
在安全性字段中,选择模式,然后从列表中选择一种安全性模式。如果选择了 WPA2 Personal,输入长度应至少为 10 位或以上的安全密钥。
选择应用。
产品基础教程
https://www.youtube.com/watch?v=ZvNtiSB2BGU
HTTPS 的配置
HTTPS 用于加密 web 浏览器和控制器之间的端到端流量。必须拥有受 web 浏览器信任的证书才能使用 HTTPS。控制器软件将在首次启动时生成自签名的证书颁发机构,再利用该证书颁发机构生成用于 HTTPS 的初始证书。控制器上的自签名证书颁发机构可以替换为由外部证书颁发机构签名的机构,以创建信任链。
默认情况下,浏览器会将 HTTP 重定向到 HTTPS。这可以通过控制器设置的 HTTPS 下的将 HTTP 重定向到 HTTPS 开关进行配置。
配置 HTTPS
要在控制器上配置 HTTPS,请执行以下操作:
访问控制器的 web 界面。由于自签名证书,浏览器将显示一条警告消息。选择高级并接受风险以继续。
前往设置,选择 HTTPS 选项卡。
在 HTTPS 设置中,选择创建 CA CSR。
在弹出窗口中,选择创建以创建证书签名请求,然后在下载完毕后选择关闭。
签署证书签名请求并将结果 CA 证书上传到控制器。
选择生成服务器证书,按指定格式输入主题备选名称 (SAN),然后单击生成。
生成完毕后,系统将显示弹出窗口,会话将重新启动。
证书
在“证书”选项卡上,您可以管理由本地证书颁发机构 (CA) 或外部 CA 签名的可信传输层安全协议 (TLS) 证书,以创建信任链。
如果加密已启用,控制器将使用 HTTPS 的 TLS 证书与 ToolsNet/ToolsTalk 进行安全通信。如果 ToolsNet/ToolsTalk 服务器需要客户端验证,请在控制器端设置证书,并配置 ToolsNet/ToolsTalk 以信任控制器的证书。
转到主菜单中的设置,然后在左侧窗格中选择证书。
选择 GUI 右上角的 + 图标。
选择选择文件。
浏览并选择证书文件。
服务器连接
该工具可以设置为与以下对象通信:
ToolsTalk − 用于定义拧紧程序和批次序列。
ToolsNet − 用于管理和分析从连接的工具执行的操作中收集的数据。
Atlas Copco 许可证管理器 − 用于激活和管理软件许可证。
配置 ToolsTalk 连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 ToolsTalk 字段中,设置以下参数:
字段
描述
开/关
启用/禁用与 ToolsTalk 服务器的通讯
服务器端口
ToolsTalk 服务器端口
服务器主机
ToolsTalk 服务器 IP 地址
选择应用。
有关如何配置 ToolsTalk 的信息,请参阅 ToolsTalk 2 用户指南。
配置 ToolsNet 连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 ToolsNet 字段中,设置以下参数:
字段
描述
开/关
启用/禁用与 ToolsNet 服务器的通讯
服务器端口
ToolsNet 服务器端口
服务器主机
ToolsNet 服务器 IP 地址
选择应用。
有关如何配置 ToolsNet 的信息,请参阅 ToolsNet 8 用户指南。
配置许可证管理器连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 Atlas Copco 许可证管理器字段中,设置以下参数:
区域
说明
开/关
启用/禁用与 Atlas Copco 许可证管理器服务器的通信
服务器端口
Atlas Copco 许可管理器服务器端口
服务器主机
Atlas Copco 许可管理器服务器的 IP 地址
选择应用。
配置远程日志记录连接
要将控制器连接至远程日志记录服务器,需在控制器上配置并激活远程日志记录设置。
在主视图上,前往设置选项卡,并在左窗格上选择服务器连接。
在远程日志记录窗口中,配置以下参数:
字段 | 说明 |
|---|---|
开/关 | 启用/禁用与远程日志记录服务器的通信 |
TCP/UDP | 选择 TCP 或 UDP 协议 |
服务器主机 | 远程日志记录服务器 IP 地址 |
服务器端口 | 远程日志记录服务器端口 |
配置日志级别
配置存储在远程日志记录服务器上的日志:
在主视图上,前往设置选项卡,并在左窗格上选择服务器连接。
在 远程日志记录 窗口中,选择配置。
在配置设施窗口选中适用的复选框。
类别
系统日志分类
错误
警报、严重、紧急、错误
警告
警告
信息
信息、通知
要将选择恢复到以前的配置,请选择撤消。
选择应用。
首选项
日期和时间
必须设置日期和时间,以便活动和结果显示时带有正确的时间戳。时间可从以下其中一种可用来源检索:
手动 - 手动设置日期、时间和时区。
NTP - 日期和时间从用户界面中定义的 NTP(网络时间协议)服务器中检索。
转到主菜单中的设置,然后在左侧窗格中选择首选项。
在日期和时间字段中,设置以下参数:
参数
描述
源
获取时间的起始源。
NTP Server 1
NTP 服务器的 IP 地址为工具提供日期和时间。
服务器 1 状态
OK/否状态
NTP Server 2
NTP 服务器的 IP 地址为工具提供日期和时间。
服务器 2 状态
OK/否状态
日期
如果将来源设为手动,则需手动输入日期。
时间
如果将来源设为手动,则需手动输入时间。
时间区
时间区既可为本地时区,也可为 UTC 等标准时区(协调世界时)
选择应用。
设置日期后,建议重新启动 STRwrench。
设置语言
用户界面可以是以下 12 种语言:
英语
捷克语
德语
西班牙语
法语
韩语
意大利语
日语
葡萄牙语
俄语
瑞典语
中文
转到主菜单中的设置,然后在左侧窗格中选择首选项。
在语言字段中,选择当前使用的语言,然后从列表中选择一种语言。
语言更改立即生效。
设置扭矩单位
执行拧紧后以及在结果列表中存储后,扭矩结果将以选定的单位显示。
单位 | 描述 |
|---|---|
cNm | 百分之一牛顿米 |
dNm | 十分之一牛顿米 |
Nm | 牛顿米 |
kNm | 千牛顿米 |
in·lbf | 英寸-磅力 |
ft·lbf | 英尺-磅力 |
in·ozf | 英寸-盎司力 |
ft·ozf | 英尺-盎司力 |
gf·cm | 克力-厘米 |
kgf·cm | 千克力-厘米 |
kgf·m | 千克力-米 |
转到主菜单中的设置,然后在左侧窗格中选择首选项。
在扭矩单位字段中,选择当前使用的单位,然后从列表中选择一个单位。
扭矩单位更改立即生效。
配置事件
每个事件都有一个默认设置,规定其是否应该确认 (Ack)、记录 (Log) 或显示 (Disp)。
某些选项无法更改。它们将呈灰显状态。
转到主菜单中的设置,然后在左侧窗格中选择 事件。
选择配置事件。
通过在搜索字段中输入事件代码并按 Enter,搜索要配置的事件。
根据需要勾选或取消勾选 ACK、 LOG 和 DISP 框。
如果适用,请在详细信息字段中添加有关事件的信息。
扩展日志记录配置
自动创建日志并存储它们。这些日志可以配置为包括使用日志组的扩展日志记录。
仅在特殊情况下使用扩展日志记录。避免在正常操作期间使用扩展日志记录,因为它会严重影响性能。
配置日志组
日志组的默认设置为“关闭”。将日志组的设置切换为开启:
在主视图上,前往设置选项卡,并在左窗格上选择扩展日志记录。
在日志组窗口,将组设置为开启。
重置日志组
可以将所有日志组重置为其默认设置。
在主视图上,前往设置选项卡,并在左窗格上选择扩展日志记录。
在重置日志组窗口中,选择重置。
此时会出现一个弹出窗口,询问是否要重置所有日志组。选择是。
持久日志组
日志组在每次重启时都会重置为其默认设置。要防止重设,可使用持久性日志组。
在主视图上,前往设置选项卡,并在左窗格上选择扩展日志记录。
在重启后保持选择窗口中,将持久设置开启。
配置 PIN 设置
使用 PIN 码可防止未授权使用或意外改动工具。可以将多个用户添加到工具,每个用户设有独立的 PIN。注意:PIN 码未与工具配置关联,主要用于登录原因。
PIN 必须为 0000–9999 范围内的四位数。启用 PIN 且已达到配置的不活动时间后,将无法编辑工具配置。工具最多可以添加 10 个用户。
对 PIN 进行更改后,将记录进行更改的用户。这将显示在更改人列中,并添加到更改历史记录中。
激活 PIN 后,从 Web 用户界面访问该工具时需要输入 PIN 码。如果没有输入正确的 PIN,则用户界面将只能读取,而不能编辑。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
将 PIN 码开关设为开启。
只有在列表中启用至少一个用户后,才可以启用 PIN。如果未启用用户,会出现一条警告信息。
填写不活动超时(单位:秒),以设置在不活动时锁定工具的时间。
不活动超时的默认值为 120 秒。注意:此为全局设置,无法按用户设定。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
选择右上角的 + 图标。
选择名称字段以编辑条目。
在用户窗口中,输入一个名称。
为用户输入 PIN 并确认 PIN。PIN 必须为 0000–9999 范围内的四位数。
两个字段(输入 PIN和确认 PIN)中的 PIN 需要与应用的更改相符。
选择权限。显示可用配置的列表。
选中用户可以访问并进行更改的必要配置左侧的复选框。
选中必要的配置后,选择确定。
出现用户窗口。全选将同时选中所有可用配置。
选中全不选将清除复选框并撤消选择。用户只能访问和更改在权限窗口中选中的配置,并且可以以只读访问方式浏览未选中的配置。对于未选中的配置,不允许进行任何更改。
选择应用。
在用户列表中,选中用户名左侧的复选框以启用用户。
启用 PIN 时,工具将在配置的不活动超时后自动锁定。
要禁用 PIN/用户,请清除用户名左侧的复选框。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
在用户字段中,选中用户名左侧的复选框以启用用户。
启用 PIN 时,工具将在配置的不活动超时后自动锁定。
要禁用 PIN/用户,请清除用户左侧的复选框。
注意:选择用户名并分别将启用开关设为开启或关闭,还可以启用和禁用 PIN。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
在用户字段中,选择用户名右侧的红色减号图标。
选择右上角的挂锁图标。
一个带有键盘的对话框将出现。输入 PIN 码,然后选择确定。
启用 PIN 并且屏幕解锁后,用户界面右上角会出现一个打开的挂锁图标。
通过选择打开的挂锁图标,可以再次手动锁定用户界面。
执行出厂重置和清除结果
可以将工具重新恢复到原厂设置。
在重置工具时将删除所有设置、配置和历史数据。只有在完全确定需要此项操作时才执行出厂重置。
转到主菜单中的设置,然后在左侧窗格中选择重置。
在出厂重置控制器字段中,选择重置按钮。
将出现一个对话框,警告所有数据将被删除。选择是。
工具将重启,以启用新设置。
转到主菜单中的设置,然后在左侧窗格中选择重置。
在清除结果字段中,选择清除按钮。
将出现一个对话框,警告所有结果和事件将被删除。选择是。
工具将重启,以清除数据。
报告和统计信息
在本节中,您可以了解可用的报告和统计信息。
使用报告选项卡
查看结果
本节介绍如何访问工具上的拧紧结果以及如何读取不同结果视图中给出的信息。
当使用集成控制器或将 STRwrench 连接到 STpad 或 STpalm 进行拧紧时,结果会存储在工具中。
实时结果和存储的结果
实时结果对话框会在出现时在屏幕上显示工具的结果。拧紧完成后,拧紧结果也会自动存储在工具中。
每个任务显示为一个结果。单次拧紧的结果可以以表格形式(含关键参数)或拧紧图形的形式显示。批次序列按照执行顺序显示所有单独的拧紧。
实时结果视图
仅当 STRwrench 与集成控制器工具一起使用时,实时结果页面才可用。
在 STRwrench Web 用户界面的底部栏,点击结果图标 ( ) 以打开实时结果页面:
) 以打开实时结果页面:

位置 | 描述 |
|---|---|
1 | 目标扭矩。 |
2 | 扭矩结果。 |
3 | 角度结果。 |
4 | 目标角度。 |
5 | 结果状态。 |
6 | NOK 拧紧会给出未成功拧紧的详细状态。 |
7 | 条形码读取器扫描的 VIN(车辆识别号)。 |
8 | 拧紧开始和结束之间经过的时间量。 |
9 | 序列中已完成的批次数量。 |
10 | 批次序列名称。 |
11 | 序列中的批次总数。 |
12 | 序列中每个已完成批次的结果:
|
13 | 批次中完成的拧紧次数。 |
14 | 拧紧程序名称。 |
15 | 批次中的拧紧总数。 |
16 | 批次中完成的拧紧次数:
|
点击页面两侧的箭头以更改视图并显示正在进行的拧紧的图表。
如果离开实时结果页面,实时结果会话将结束,数据将被清除。
存储的结果视图
该工具存储使用集成控制器或将 STRwrench 连接到 STpad 或 STpalm 执行的操作结果。
转到主菜单中的报告,然后在左侧窗格中选择结果。
选择查看所有结果。结果列表将显示关于以下内容的信息:
日期:执行拧紧的日期和时间。
拧紧程序:“拧紧程序”列显示“多步骤拧紧程序”名称或“批处序列”名称,后跟“批处序列”中的“拧紧程序”名称。
结果:扭矩/角度结果。
限值:“限值”列仅在用户设置“步骤监视器”或“步骤限制”(“步骤级别”)或“程序监视器”或“程序限制”(“多步骤程序”级别)时显示。
步骤监视器、步骤限制、程序监视器和程序限制适用于最终扭矩和最终角度。
详情:拧紧/拧松结果详情。
轨迹复选框:通过选中轨迹复选框,相应结果将显示在同步轨迹结果视图中。
标有红柱的结果状态为 NOK。有关 NOK 结果的说明,请参见 NOK 结果列表。
在列表中选择一个结果进入轨迹结果视图。
轨迹结果视图窗口将逐步显示拧紧寿命周期。
当拧紧为 NOK 时,轨迹结果视图将显示引发它的步骤监视器或步骤限制。
在轨迹图的右上角,选择左箭头/右箭头以显示必要的轨迹图。
下列轨迹图可用:
扭矩/时间
扭矩/角度
角度/时间
在轨迹图上,可以放大/缩小、移动轨迹以及读取特定点的 x 轴和 y 轴值。
在轨迹图的左下角,可选择“+”放大、选择“-”缩小,或选择“正方形图标”将缩放级别重置回默认视图。
轨迹结果视图窗口的下部显示详细的步骤信息。
查看同步后的轨迹
转到主菜单中的报告,然后在左侧窗格中选择结果。
选择查看所有结果。
通过标记相应结果的
 图标来选择要比较的轨迹。选中的轨迹图标将变为蓝色。
图标来选择要比较的轨迹。选中的轨迹图标将变为蓝色。最多可选中 10 条轨迹。
不带
图标的结果不支持同步。选中右上角的
 图标将打开同步轨迹视图。当选择
图标将打开同步轨迹视图。当选择  图标时,所有选定的结果轨迹将被取消选中。
图标时,所有选定的结果轨迹将被取消选中。在同步轨迹结果视图中,从下拉列表中选择首选的同步方法。
选择右上角带有箭头的轨迹类型。
同步轨迹结果视图显示如下:
1 | 选择同步轨迹的方法以及当前同步方法的显示方式。 |
2 | 缩放方法可更详细地检查轨迹各部分。选择“+”放大、选择“-”缩小,或选择“正方形图标”将缩放级别重置回默认视图。 还可以通过按住鼠标右键、将鼠标移到某个部分上,然后松开鼠标右键来缩放到特定部分。所绘矩形内的区域定义了要显示的区域。 |
3 | 每个结果都由一个选项卡表示,显示执行拧紧时的时间。每个选项卡左侧的图标反映拧紧结果:
单击图标可在其轨迹的以下显示设置之间切换:
|
4 | 更改主要结果轨迹。 主要结果轨迹用作参考,将定义 x 轴的值。仅一条轨迹可设为主要结果。第一条被选中的轨迹(最左侧选项卡)默认用作参考。 |
5 | 当前选定结果的拧紧详情。 |
6 | 在可用轨迹类型之间切换。下列轨迹图可用:
|
同步方法
同步方法是按特定值同步轨迹的不同策略。
轨迹可按峰值扭矩(每个轨迹达到的最高扭矩)等进行同步。这将沿 x 轴移动所有轨迹,直到每条曲线在 x 轴上完全相同的位置达到其峰值扭矩值。
随后的所有结果将根据以下方法之一获得一个 x 轴偏移:
同步方法 | 描述 |
|---|---|
无 | 默认值。选定的轨迹不会被同步。 |
峰值/扭矩 | 所有轨迹都向峰值同步,即沿 x 轴移动,以使峰值与主结果的峰值位于 x 轴上的相同位置。 |
自定义/扭矩 |
如果选中了同步方法定制且所有轨迹都未包含所配置的值,定制值字段中将显示感叹号。 |
如果结果没有与同步方法匹配的轨迹值,则无法同步,并且不会显示其轨迹。而是显示感叹号。
如果没有能进行同步的轨迹,则显示错误消息“无法同步”。
查看事件
事件用于通知用户,系统中某些状态发生变化或出现某些状态。它们分为三种类型:信息、警告和错误,需要采取不同的措施。
发生的每个事件都存储在事件日志中。
转到主菜单中的报告,然后在左侧窗格中选择结果。
选择查看所有事件。
在列表中选择一个事件以打开事件对话框。
事件代码
事件用于通知用户,系统中某些状态发生变化或出现某些状态。它们的类型不同,需要采取不同的行动处理。
上述的部分过程只能由 Atlas Copco 授权的服务提供商执行。
事件代码组
事件代码可以分为以下几组:
事件代码 | 组 | 描述 |
|---|---|---|
1000-1999 | 控制器,工具 | 控制器和工具事件。 |
2000-2999 | 工具 | 工具事件。 |
3000-3999 | 控制器、驱动器、通道、配置 | 控制器与驱动器事件,以及步骤同步事件。 |
4000-4999 | 过程 | 拧紧过程事件。 |
5000-5999 | 配置 | 程序配置事件。 |
6000-6999 | 配件 | 配件事件。 |
7000-7999 | 消息 | 消息。 |
事件代码列表说明
下表描述了事件代码列表中的信息:
项目 | 描述 | |
|---|---|---|
事件代码 | 唯一事件编号。 | |
类型 | 事件类型:
| |
名称 | 事件的描述性名称。 | |
描述 | 对事件及其发生原因的简短描述。 | |
程序 | 如果适用,步骤中会包含关于如何清除事件的说明。 | |
事件代码列表
事件 | 描述 | 程序 | ||
|---|---|---|---|---|
代码 | 类型 | 名称 | ||
1000 | 信息 | 控制器已启动 | 控制器已启动。 | 不适用 |
1001 | 警告 | 控制器序列号已更新 | 如果 IT 板盒序列号(控制器序列号)不同于 AUX 板盒序列号,会在启动时生成。AUX 板盒在现场视为不可替代。控制器在更新序列号时将会重启。 | 更换 IT 板或盒。 |
1010 | 信息 | 工具已连接 | 工具已连接。 | 不适用 |
1011 | 信息 | 工具已断开 | 工具已断开。 | 不适用 |
1012 | 信息 | 工具连接被拒绝 | OpenProtocol 工具拒绝了控制器连接。 | 检查是否有另一个控制器连接到该工具。 |
2000 | 警告 | 电池电量低 |
| 更换电池。 |
2001 | 警告 | 电池电量用完 |
| 更换电池。 |
2002 | 警告 | 工具电池健康状态低 | 检测到工具电池存在健康问题。 | 更换电池 |
2004 | 警告 | 工具为非首选类型 | 工具已被具有不同最大扭矩的工具替换。 | 更改工具 |
2006 | 警告 | 工具备用电池健康状态低 | 工具中的备用电池性能太差。 | 应更换备用电池。 |
2007 | 警告 | 工具备用电池丢失 | 工具备用电池缺失。 | 插入电池 |
2008 | 警告 | 工具备用电池错误 | 检测到工具备用电池错误。 | 更换电池 |
2009 | 警告 | 备份电池电压低 | 控制器备份电池电量几乎耗尽 | 更换电池 |
2010 | 错误 | 工具软件版本不匹配 | 工具和控制器软件版本不兼容。 | 请对工具进行维修 - 更新工具软件。 |
2012 | 警告 | 工具通信干扰 | 工具和控制器之间的通信中断。 | 重新定位天线布置。 |
2013 | 警告 | 方向选择环位置错误 | 工具方向开关位于故障位。 | 如果频繁出现 - 请对工具进行维修。 |
2014 | 警告 | 工具过热 | 工具过热。 | 让工具冷却。 |
2015 | 错误 | 工具温度传感器错误 |
| 维修工具。 |
2016 | 警告 | 工具脉冲装置过热 | 工具脉冲装置过热。工具未锁定,但是只要工具脉冲装置温度超过阈值,工具启动时就会显示警告。 | 让工具冷却 |
2019 | 警告 | 工具无法启动电机 | 工具电机故障。 | |
2020 | 警告 | 工具需要电机调谐 | 工具需要电机调谐。 | 执行电机调谐。 |
2021 | 警告 | 电机调谐失败 | 电机调谐失败。 | 完成电机调谐或请对工具进行维修。 |
2022 | 信息 | 电机调谐完成 | 电机调谐完成。 | 不适用 |
2023 | 警告 | 工具需要开口端调整 | 工具需要执行开口端调整。 | 执行开口端调整。 |
2024 | 警告 | 开启开口端失败 | 开口端调整失败。 | 尝试再执行一次开口端调整。如果还是失败,请对工具进行维修。 |
2025 | 信息 | 开启开口端成功 | 开口端调整成功。 | 不适用 |
2026 | 警告 | 开口端失败 | 开口端定位失败。 | 再次按下触发器,并等待定位完成。如果还是失败,请对工具进行维修。 |
2027 | 警告 | 由于工具温度高,使用受到限制 | 已达到温度极限。拧紧已被禁止,以减少由于过热而导致工具关闭的风险。 | 等待直到工具温度降低。 |
2030 | 错误 | 工具内存故障 – 更改工具 | 工具存储器损坏。 | 维修该工具。 |
2031 | 错误 | 工具配件内存损坏 | 工具配件存储器损坏。 | 维修工具配件。 |
2040 | 错误 | 系统检查失败 |
| |
2041 | 错误 | 扭矩传感器错误 | 校准错误或工具报告传感器错误时会生成该错误。 | 维修该工具。 |
2042 | 错误 | 角度传感器错误 |
| 维修该工具。 |
2043 | 错误 | 工具接地故障报错 |
| 维修该工具。 |
2044 | 信息 | 工具保养间隔已过 | 表示需要对工具进行保养。超过设定的拧紧数时触发。 | 执行工具维修。 |
2045 | 警告 | 工具校准数据无效 | 如果校准数据验证失败。 | 维修工具。 |
2046 | 信息 | 已过了工具下一次校准日期 | 表示需要校准工具。在设置中启用校准警报并且当前时间大于下次校准日期时,会触发校准工具。 | 维修工具。 |
2047 | 信息 | 自动更新服务数据校验和 | 表示服务数据校验和已自动更新。 | 不适用 |
2048 | 信息 | 工具校准值通过 QA 设备更新 | 使用 QA 设备执行校准时,工具校准会得到更新 | |
2050 | 错误 | 工具参数文件不受支持 | 所需的工具参数缺失。 | 更新工具参数。 |
2060 | 信息 | 意外触发行为 | 用于防止连接了配件的工具启动。 | 不适用 |
2071 | 错误 | 工具内存损坏 | 工具描述符已损坏。 | 维修该工具。 |
2072 | 信息 | 未知的设备已连接 |
| |
2073 | 警告 | 工具触发器监管失效 | HW 通道故障。工具触发器的硬件和软件不匹配。 | |
2074 | 警告 | 工具标识电路板故障 | 工具标识电路板故障。 | 维修该工具。 |
2075 | 警告 | 工具风扇电压故障 | 工具风扇电压故障。 | 维修该工具。 |
2076 | 警告 | 工具配件总线电压故障 | 工具配件总线电压故障。 | 维修该工具。 |
2077 | 警告 | 工具触发器传感器错误 | 工具触发器传感器错误。 | 维修该工具。 |
2078 | 信息 | 工具拧紧程序已更新 | 工具因拧紧程序更新而锁定。 | |
2079 | 错误 | 工具线缆不受支持 | 工具线缆已损坏。线缆中的芯片没有响应或损坏。 | 切换线缆。 |
2080 | 错误 | 工具电池故障 | 直流电压太高或太低。电池故障。 | 联系 Atlas Copco 服务代表并将电池送回 Atlas Copco(不得重复使用!)。 |
2081 | 错误 | 达到工具电流限值 | 达到电流限值且驱动装置会被禁用。 | 维修该工具。 |
2082 | 错误 | 工具电流测量值有误差 | 电流测量值有误差。无法测得可靠的电流结果。 | 维修该工具。 |
2083 | 错误 | 工具内部错误 | 各种内部硬件错误。 | 维修该工具。 |
2084 | 错误 | 工具内部软件错误 | 各种内部软件错误。 | 维修该工具。 |
2085 | 错误 | 工具 RBU 错误 | 工具软件检测到 RBU 错误。 | 检查当前是否安装了 RBU。如果错误仍然存在,请对工具进行维修。 |
2086 | 错误 | 工具停转 | 工具电机失速。 | 维修该工具。 |
2087 | 警告 | 工具电机电流高 | 工具电机电流超过限值,工具被锁定。工具将进入故障保护模式。 | |
2088 | 警告 | 工具电池电流高 | 工具电池电流过高。 | |
2089 | 警告 | 工具驱动电压低 | 工具驱动电压低于监控的电压下限。 | |
2090 | 警告 | 工具驱动电压高 | 工具驱动电压高于监控的电压上限。 | |
2091 | 警告 | 工具主板错误 | 工具主板内部错误。 | |
2092 | 警告 | 工具电源模块错误 | 工具电源模块内部错误。 | |
2093 | 警告 | 脉冲单元油位低 | 所连接脉冲工具的油位低。 | 维修工具 |
2094 | 警告 | 脉冲单元油位空 | 所连接脉冲工具的油位低于所需的工作油位 | 维修工具 |
2095 | 警告 | 工具电池通信丢失 | 工具丢失与电池的通信。 | 确保电池正确安装。否则请更换电池 |
2096 | 错误 | 工具电池软件版本不匹配。 | 工具电池软件与工具软件不兼容。 | 更新软件。 |
2100 | 信息 | STwrench smartHead 已移除 | 已删除 STwrench smartHead。 | 重新连接 smartHead 并重启扳手。 |
2101 | 警告 | 锁定时扳手拧紧 | 当工具状态锁定在控制器中时,执行扳手拧紧操作。 | 等待直到控制器中的工具状态解锁。 |
3000 | 错误 | 控制器内部软件错误 | 控制器软件错误。 | 联系服务人员。 |
3001 | 错误 | 控制器时钟电池电量耗尽 | 内部电池接近使用寿命极限。 | 更换电池 |
3010 | 警告 | 系统过热 | 控制器过热。 | 降温。 |
3011 | 警告 | 驱动器过热的控制器硬件 | 降温。 | |
3013 | 警告 | 由于控制器温度高,使用受到限制 | 已达到温度极限。禁止拧紧以减少由于过热而导致控制器关闭的风险。 | 等待直到控制器温度降低。 |
3020 | 警告 | 控制器硬件故障 | ||
3021 | 警告 | 系统电压问题 | 直流电压太高或太低。 | 不适用 |
3030 | 错误 | IP 地址与网络上的另一个节点冲突 | 设置的 IP 地址已经被同一网络上的其他设备占用。 | 更改其中一个设备的 IP 地址。 |
3031 | 信息 | 网线断开 | 工厂端的载体已丢失(电缆断开连接)。 | 检查线缆连接。 |
3032 | 信息 | 配对已启动 | 工具配对已启动。 | 不适用 |
3033 | 信息 | 配对成功 | 工具配对成功。 | 不适用 |
3034 | 错误 | 配对不成功:找不到工具 | 扫描射频点时未发现任何可与控制器配对的工具。 | 将工具设为配对模式并重试。 |
3035 | 错误 | 配对不成功:检测到不止一个工具 | 扫描射频点时,控制器找到的工具多于一个 | 控制器开始配对模式时,应确保只有一个工具处于配对模式下。 |
3036 | 错误 | 配对不成功:通信错误 | 配对过程中,发生控制器连接中断、意外的应答或超时问题。 | 再次尝试执行配对。如果还是失败,请对工具进行维修。 |
3037 | 信息 | 配对不成功:工具插槽已满 | 清除一个工具插槽 | |
3040 | 警告 | 紧急停机 | 因紧急停机,驱动装置被禁用。 | 重置紧急停机。 |
3050 | 信息 | 系统时钟已更新 | 系统时钟已更新。 | 不适用 |
3051 | 错误 | 系统时钟错误 | 实时时钟 (RTC) 硬件的时间读数错误。 | 更换 RTC 的电池。 |
3052 | 警告 | 远程启动配置出错 | HW 与 SW 的远程启动配置不匹配。 | 检查并校验 HW 指拨开关是否与选定启动来源相匹配。 |
3053 | 信息 | 驱动器已连接 | StepSync 驱动器已连接。 | |
3054 | 信息 | 驱动器已断开连接 | StepSync 驱动器已断开连接。 | |
3055 | 警告 | 模式配置错误 | 当选定的模式错误配置时生成。例如,使用相同的螺栓编号或相同的通道配置两个螺栓,不完整的模式配置 | 查看 Toolstalk2,了解模式配置错误 |
3056 | 警告 | 无法启动,工具或驱动器丢失 | 当已使用的通道缺失驱动器或工具时生成。 | 查看 HMI 上的通道菜单。连接丢失的驱动或工具。 |
3057 | 信息 | 无法启动,通道已在使用中 | 当所需的通道被分配给另一个虚拟站点时生成 | |
3058 | 信息 | 未选择模式 | 选择模式 | |
3059 | 警告 | 连接 Atlas Copco 许可证管理器失败 | 表明控制器未能连接到本地许可证管理器来获得许可证。 | 查看本地网络。如果再次失败,请对控制器进行维修。 |
3084 | 错误 | Soft PLC 运行时间错误 | eCLR 以不受控的方式终止。 | |
3150 | 错误 | 软件 IAM 不兼容性 | IAM 与控制器上安装的软件不兼容。 | 更换 IAM。 |
3160 | 错误 | 无法激活新安装的软件 | 激活期间出现问题。当新安装的软件启动时,会发生回退到以前的工作软件的情况。当新软件启动失败三次且仅在软件安装过程中时,就会发生这种情况。 | 进行导出,并联系 Atlas Copco 以获得更多帮助。记下您要安装的软件版本以及正在运行的软件版本。 |
3161 | 错误 | 在非预期的软件分区上启动 | 控制器已在不活动的软件侧启动,而非在预期的软件侧启动。 | 记下软件信息(在控制器的主页,选择控制器 > 软件)。尝试重新启动控制器,并确保再次启动时在正确的软件上运行。如果错误仍然存在,请进行导出并联系 Atlas Copco。 |
3500 | 错误 | 通用许可管理器错误 | 在使用的功能管理系统中检测到不一致。 | 请联系 Atlas Copco 代表。 |
3501 | 错误 | 许可证管理器同步错误 |
| |
3502 | 信息 | 许可证管理器同步已完成 |
| |
3503 | 警告 | 许可证管理器:另一个来源正在使用 | 许可证被其他来源使用。 | 检查许可证分配 |
3504 | 警告 | 需要重启许可证管理器 | 重启许可证管理器 | |
3505 | 信息 | USB 许可证同步已启动 | ||
3506 | 错误 | USB 许可证同步错误 | ||
3507 | 信息 | USB 许可证同步已完成 | ||
3508 | 信息 | 您的一个或多个许可证即将过期。请确保您已配置许可证服务器。 | 更新许可证 | |
3511 | 警告 | 您的一个许可证具有不同的许可证定义 | 在要使用的许可证中检测到不一致。 | 请联系 Atlas Copco 代表。 |
3550 | 警告 | 许可证丢失 | 安装正确的许可证 | |
4010 | 信息 | 工具被数字输入锁住 | 通过数字输入信号锁定工具。 | 不适用 |
4011 | 信息 | 工具被开发协议锁定 | 通过开放协议锁定工具。 | 不适用 |
4012 | 信息 | 工具被现场总线锁定 | 通过现场总线锁定工具。 | 不适用 |
4013 | 信息 | 工具由套筒选择器锁定 | 套筒选择器与虚拟站点断开连接时工具被锁定。 | 通过主机解锁将工具解锁 |
4014 | 信息 | 工具由 Soft PLC 锁定 | Soft PLC 信号锁定了工具。 | 通过主机解锁将工具解锁 |
4015 | 信息 | 拧松被禁用 | 在拧紧程序中禁用拧松 | |
4016 | 信息 | 拧紧已禁用 |
| |
4017 | 信息 | 拧松未配置 | 所选的拧紧程序未配置拧松 | 选择不同的拧紧程序 |
4020 | 信息 | NOK 拧紧过多 | 超过了批次中的最大持续 NOK 拧紧 | |
4025 | 信息 | 未选择拧紧程序 | 未选择拧紧程序。 | 选择拧紧程序或批次序列。 |
4030 | 信息 | 批次序列中止 | 批次序列已中止。 | |
4031 | 信息 | 完成批次序列所需的最大时间。 |
| |
4032 | 信息 | 完成首次拧紧所需的最大时间。 |
| |
4035 | 信息 | 通过线路控制锁定 |
| |
4040 | 信息 | 经备用标识符锁定 | 工具被备用标识符锁定。 | |
4050 | 无效的套筒配置 | 拧紧程序分配给多个套筒。 | 拧紧程序分配给多个套筒 | |
4060 | 信息 | 工具在批次完成时锁定 | 当批次序列完成时借助标记工具锁定批次时,本事件会在用户按下触发器时生成。 | 在完成时采用信号解锁工具解锁。 |
4070 | 信息 | 进程进入手动模式 | 表明已为虚拟站点启用手动模式 | |
4071 | 信息 | 进程进入自动模式 | 表明已为虚拟站点启用自动模式 | |
4500 | 信息 | 结果 - 驱动故障 | 检测到内部驱动故障或驱动丢失。 |
|
4501 | 信息 | 结果 - 重复拧紧 | 在重复拧紧检测功能开启时试图拧紧已拧紧的螺栓。 |
|
4502 | 信息 | 结果 - 软启动扭矩较低 | 软启动扭矩低于最小水平。 |
|
4503 | 信息 | 结果 - 软启动扭矩较高 | 软启动扭矩超过最大水平。 |
|
4504 | 信息 | 结果 - 自攻扭矩较高 | 自攻扭矩超过最大水平。 |
|
4505 | 信息 | 结果 - 自攻扭矩较低 | 自攻扭矩低于最小限值。 |
|
4506 | 信息 | 结果 - 安全扭矩较低 | 自动计算扭矩值,确保正确安装扭矩传感器。 |
|
4507 | 信息 | 结果 - 旋入扭矩较高 | 旋入扭矩超过最大水平。 |
|
4508 | 信息 | 结果 - 旋入角度较高 | 旋入角度超过最大水平。 |
|
4509 | 信息 | 结果 - 旋入时间较高 | 旋入时间超过最大限值。 |
|
4510 | 信息 | 结果 - 旋入时间较低 | 旋入时间低于最小限值。 |
|
4511 | 信息 | 结果 - 旋入扭矩较低 | 旋入扭矩低于最小水平。 |
|
4512 | 信息 | 结果 - 旋入角度较低 | 旋入角度低于最小水平。 |
|
4513 | 信息 | 结果 - 最终扭矩较高 | 最终步骤扭矩超过最大水平。 |
|
4514 | 信息 | 结果 - 最终角度较高 | 最终步骤角度超过最大水平。 |
|
4515 | 信息 | 结果 - 最终扭矩较低 | 最终步骤扭矩低于最小水平。 |
|
4516 | 信息 | 结果 - 最终角度较低 | 最终步骤角度低于最小水平。 |
|
4517 | 信息 | 结果 - 拧紧超时 | 超过拧紧时间限值。一般拧紧策略的最大拧紧时间为 30 秒。多步骤的最大拧紧时间取决于步骤的最大时间限制。故障代码取决于拧紧阶段。 | 重新拧紧。 |
4518 | 信息 | 结果 - 触发器丢失 | 达到目标前工具触发器已松开。 对于一般拧紧策略,拧紧阶段完成之前不允许释放触发器。 对于多步骤,达到具体步骤的目标之前丢失触发器将显示故障。 |
|
4519 | 信息 | 早期扭矩丢失 | 套筒从螺母上滑脱。 |
|
4520 | 信息 | 结果 - 在最终步骤前达到目标 | 在拧紧程序的最终步骤前达到目标扭矩。 |
|
4521 | 信息 | 结果 - 后视图扭矩较低 | 后视图扭矩低于最小水平。 |
|
4522 | 信息 | 结果 - 后视图扭矩较高 | 后视图扭矩超过最大水平。 |
|
4523 | 信息 | 结果 - 未达到后视图扭矩间隔 | 未达到后视图扭矩间隔。 |
|
4524 | 信息 | 结果 - 未达到扭矩补偿间隔 | 在未达到旋入端前的扭矩补偿间隔角度。 |
|
4525 | 信息 | 结果:工具移动超出限制 | 来自 NOK 拧紧详情状态。 |
|
4526 | 信息 | 结果 SafetyCurrMon 传感器不匹配 | 电流监测错误。 |
|
4527 | 信息 | 结果:工具移动超出限制 |
|
|
4528 | 信息 | 结果 - 软启动角度较高 | 软启动角度超过最大水平(四步)。 |
|
4529 | 信息 | 结果 - 软启动角度较低 | 软启动角度低于最小水平(四步)。 |
|
4530 | 信息 | 结果 - 第一角度较高 | 初始步骤角度超过最大水平(四步)。 |
|
4531 | 信息 | 结果 - 第一角度较低 | 初始步骤角度低于最小水平(四步)。 |
|
4532 | 信息 | 结果 - 第一扭矩较高 | 初始步骤扭矩超过最大水平(四步)。 |
|
4533 | 信息 | 结果 - 第一扭矩较低 | 初始步骤扭矩低于最小水平(四步)。 |
|
4534 | 信息 | 结果 - 第一时间较高 | 初始步骤时间超过最大水平(四步)。 |
|
4535 | 信息 | 结果 - 第一时间较低 | 初始步骤时间低于最小水平(四步)。 |
|
4536 | 信息 | 结果 - 最终时间较高 | 最终步骤时间超过最大水平(四步)。 |
|
4537 | 信息 | 结果 - 最终时间较低 | 最终步骤时间低于最小水平(四步)。 |
|
4538 | 信息 | 结果 - 最终监管扭矩较低 | 未达到最终监管扭矩。 |
|
4539 | 信息 | 结果 - 软启动时间较高 | 软启动时间超过最大水平(四步)。 |
|
4540 | 信息 | 结果 - 软启动时间较低 | 软启动时间低于最小水平(四步)。 |
|
4543 | 信息 | 结果 - 贴合监控高 | 仅限扳手。监控器检测到超出贴合数值。 | |
4545 | 信息 | 结果 - 无剩余扭矩 | 仅限扳手。残余扭矩低于阈值。 | |
4546 | 信息 | 结果 - 过速 | 仅限扳手。扳手陀螺仪因速度太高无法测量角度。 | |
4547 | 信息 | 结果 - 有效拧松 | 仅限扳手。扳手检测到意外拧松。 | |
4548 | 信息 | 结果 - 终值低于目标值 | 最终扭矩低于拧紧程序中设定的目标扭矩。 | |
4549 | 信息 | 超过 TurboTight 时间限制 | 超过了 TurboTight 时间限值。 | |
4550 | 信息 | 结果 - 旋入脉冲较高 | 超出最大旋入脉冲数量。 | |
4551 | 信息 | 结果 - 旋入脉冲较低 | 旋入在达到最小旋入脉冲数量之前已完成。 | |
4552 | 信息 | 结果 - 最终脉冲较高 | 超出最大脉冲数量。 | |
4553 | 信息 | 结果 - 最终脉冲较低 | 拧紧在达到最小脉冲数量之前已完成。 | |
4554 | 信息 | 切断电流高 | 切断时的电流超出电流上限。 | |
4555 | 信息 | 切断电流低 | 测得的切断电流低于电流下限 | |
4556 | 信息 | 多步骤未分类错误。 | 多步骤配置出错,通常与工具验证有关。 | |
4557 | 信息 | 结果过载 | ||
4600 | 警告 | 数据删除 (Data Drop) 或数据保持 (Data Hold) 与批次拧紧结合使用。信号无效。 | 数据删除 (Data Drop) 和数据保持 (Data Hold) 仅支持工作任务,不带批次控制。如果必须使用该信号,请选择另一个工作任务。 仅对 Flex 和 StepSync 有效。 | |
4601 | 信息 | 数据保持 (Data Hold) 激活:信号低即发送拧紧结果。 | 仅对 Flex 和 StepSync 有效。 | |
4602 | 信息 | 数据删除 (Data Drop) 激活:丢弃拧紧结果。 | 仅对 Flex 和 StepSync 有效。 | |
5010 | 警告 | 无效的拧紧程序参数值 | 所选拧紧程序中的参数无效。 | 检查所选拧紧程序的配置,查找并更改参数值。 |
5020 | 信息 | 主触发器并非活动的启动来源 | 当配置为只通过下压式开关启动且用户按压主触发器时生成。直到用户按压下压式开关时生成。 | 按压下压式开关以启动工具。 |
5030 | 信息 | 拧紧程序复杂性超出工具负荷 | 所选的拧紧程序对工具来说太过复杂。工具将被锁定。 | 降低拧紧程序的复杂性,或者选择其他程序 |
6010 | 信息 | 附件已连接 | 附件已连接至控制器。 | |
6020 | 信息 | 附件已断开 | 附件已从控制器断开。 | |
6021 | 警告 | 现场总线脱机 | 现场总线无通信。 | |
6030 | 警告 | 附件地址冲突 | 两个或更多附件使用相同的地址连接。 | 更改附件的地址。 |
6040 | 警告 | 附件通信错误 | 附件出现间歇的通信错误。 | 校验线缆和连接器。 |
6041 | 警告 | 现场总线错误 | 现场总线出现通信错误。 |
|
6042 | 警告 | 现场总线模块不匹配 | 安装的现场总线模块与配置的模块不匹配。 | 更改配置以使其与安装的模块匹配,或以正确的模块替换安装的模块。 |
6050 | 信息 | 所选套筒错误 | 没有选择任何套筒或选择了错误的套筒时生成。 | |
6090 | 警告 | 无法识别条码枪 | 未找到唯一序列号时。 | 配置条形码阅读器设备。 |
7010 | 信息 | 要显示的消息文本 | 显示消息的通用事件。 | 无 |
8200 | 信息 | 打开串行端口失败 | 无法打开要使用的串行端口。 | 检查串行端口连接。 |
8214 | 错误 | EHMI 软件版本不匹配 | EHMI 软件版本与控制器的兼容性不匹配。 | 更新 EHMI 的软件版本。 |
参考
在本节中,您可以找到其他有用的信息。
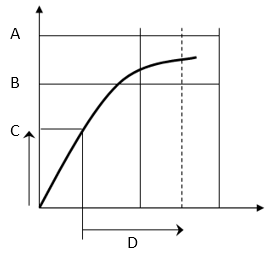
生产策略
生产策略可分成三个主要类别:
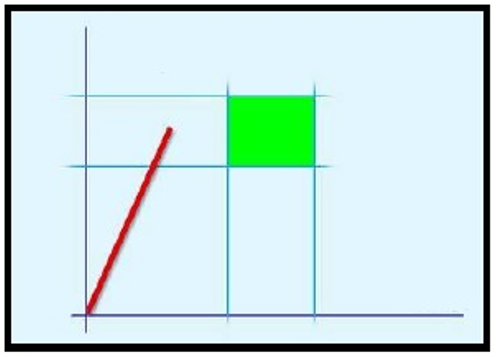
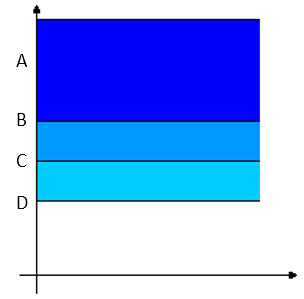
在扭矩限值内拧紧:这是最简单的拧紧方法,在限值范围内施加扭矩就足够了。

扭矩与时间 A
扭矩上限
B
标称值
C
扭矩下限
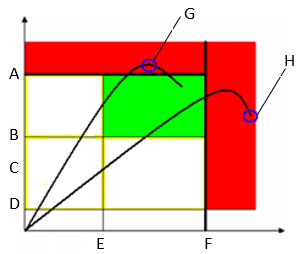
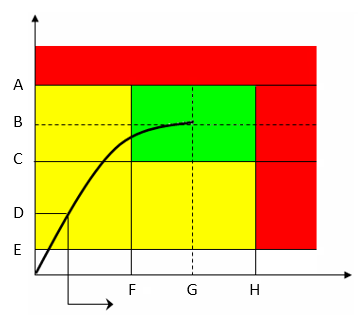
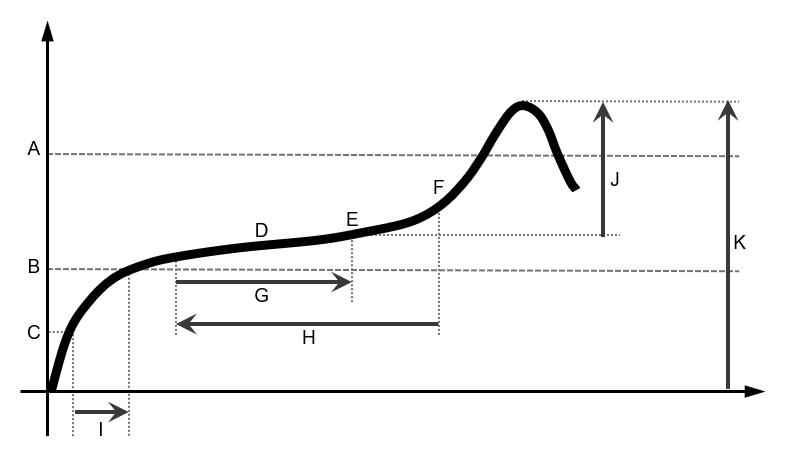
在扭矩和角度限值内拧紧:这是一种更可靠的拧紧方式,因为在拧紧过程中使用了额外的信息(角度)。
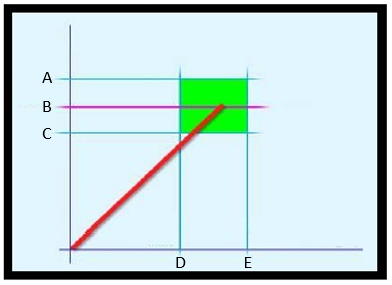
扭矩与角度 A
扭矩上限
B
标称值
C
扭矩下限
D
角度下限
E
角度上限
使用此方法,可以检测到接头上的潜在问题(请参阅以下示例):
扭矩正确,但角度太小:
|
|
|
|
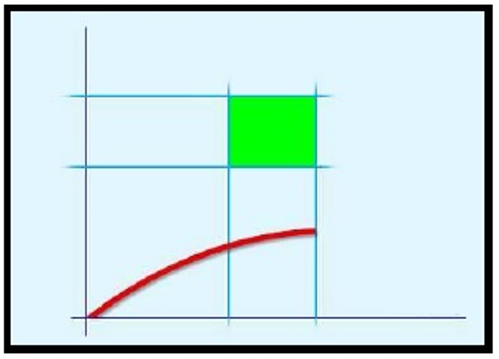
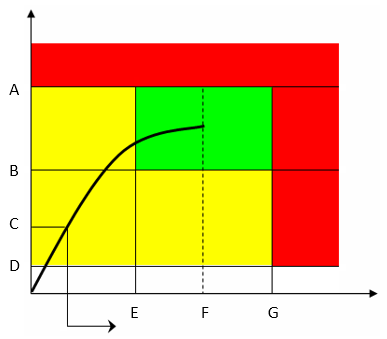
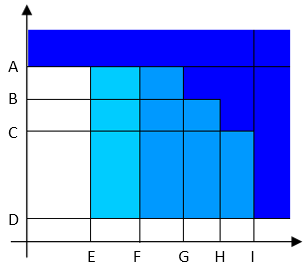
通过扭矩和额外的角度旋转(扭矩+角度)拧紧:先将螺栓拧紧到一定的扭矩,然后再进一步拧紧到指定角度。目标是向螺栓施加压力使之超过屈服点。即使角度有差异,扭矩(导致夹紧力)也是相当可靠的。有时,接头是专门设计的,对接头的分析有助于确保应变远离断裂点。

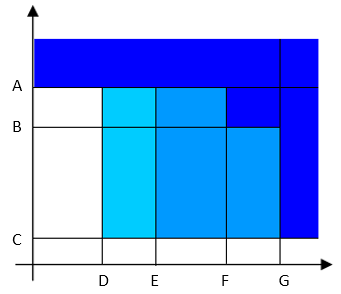
扭矩与角度 拧紧至弹性极限(屈服点)拧紧螺栓,直到达到其弹性极限为止。需要每颗螺栓都达到其最大夹紧力时,可使用此方法。此方法在汽车工业中很少使用(例如:连杆)。它更常用于航空航天工业。

 | 这些螺栓通常用于特殊应用,螺栓杆设计有特殊的薄截面可拉伸(这种螺栓起到精密弹簧的作用)。 |
扭矩
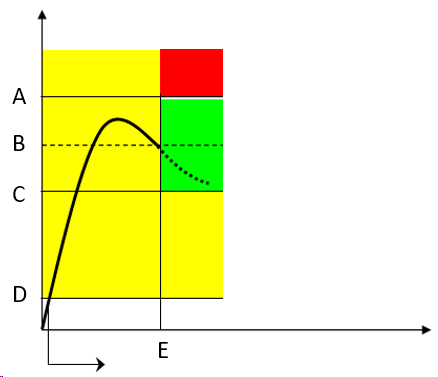
此策略引导操作员直接达到所需的目标扭矩,不读取任何角度。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
扭矩单位 | 此参数不可编辑。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |

A | 扭矩最大值 | B | 目标扭矩 |
C | 最小扭矩 | D | 程序开始 |
绿色区域表示 OK 结果区。
扭矩结果是拧紧期间测得的最大扭矩。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
扭矩与角度 A
扭矩最大值
B
第三个百分比
C
第二个百分比
D
第一个百分比
蜂鸣器
当扭矩超过程序开始值时,蜂鸣声响起;当达到第一个百分比、第二个百分比、第三个百分比,以及最大扭矩时,信号增加。
振动:
与第三个径向梯度 LED 一起启动。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
扭矩(控制)/角度(监测)
此策略引导操作员直接达到所需的目标扭矩并监测角度。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |

A | 扭矩最大值 | B | 目标扭矩 |
C | 最小扭矩 | D | 触发器扭矩 |
E | 程序开始 | F | 最小角度 |
G | 最大角度 |
绿色区域表示 OK 结果区。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间,角度介于最小角度和最大角度之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩,角度超过最大角度。

扭矩与角度 A
扭矩最大值
B
第三个百分比
C
第二个百分比
D
第一个百分比
E
程序开始
F
最大角度
蜂鸣器:
当扭矩超过程序开始值时开始;当达到第一个百分比、第二个百分比、第三个百分比,以及最大角度时,信号增加。
振动:
与第三个径向梯度 LED 一起启动。
扭矩/角度结果:
如果扭矩/角度未超过扭矩/角度限值,则在扭矩峰值或角度峰值处获取结果(根据拧紧程序中的规定)。
如果扭矩/角度超过限值,则按照以下方式获取结果:

扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为扭矩峰值时,如果扭矩(或扭矩和角度)超过限值,则在扭矩峰值处获取结果。
H
当停止条件被设为扭矩峰值时,如果只有角度超过限值,则在角度峰值处获取结果。
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为角度峰值时,如果角度(或扭矩和角度)超过限值,则在角度峰值处获取结果。
H
当停止条件被设为角度峰值时,如果只有扭矩超过限值,则在扭矩峰值处获取结果。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的结果指示器和持续时间的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
扭矩(监测)/角度(控制)
此策略引导操作员直接达到所需的目标角度并监测扭矩。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
A | 扭矩最大值 | B | 最小扭矩 |
C | 触发器扭矩 | D | 程序开始 |
E | 最小角度 | F | 目标角度 |
G | 最大角度 |
绿色区域表示 OK 结果区。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间,角度介于最小角度和最大角度之间
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩,角度超过最大角度。
扭矩与角度 A
扭矩最大值
B
程序开始
C
第一个百分比
D
第二个百分比
E
第三个百分比
F
最大角度
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当达到第一个百分比、第二个百分比、第三个百分比,以及最大扭矩时,信号增加。
振动:
与第三个径向梯度 LED 一起启动。
扭矩/角度结果:
如果扭矩/角度未超过扭矩/角度限值,则在扭矩峰值或角度峰值处获取结果(根据拧紧程序中的规定)。
如果扭矩/角度超过限值,则按照以下方式获取结果:
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为扭矩峰值时,如果扭矩(或扭矩和角度)超过限值,则在扭矩峰值处获取结果。
H
当停止条件被设为扭矩峰值时,如果只有角度超过限值,则在角度峰值处获取结果。
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为角度峰值时,如果角度(或扭矩和角度)超过限值,则在角度峰值处获取结果。
H
当停止条件被设为角度峰值时,如果只有扭矩超过限值,则在扭矩峰值处获取结果。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的结果指示器和持续时间的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
扭矩 + 角度
使用扭矩(监测)/角度(控制)策略,可以实现扭矩 + 角度策略。
将触发扭矩值定义为开始执行该策略的“+ Angle”(+ 角度)的起始扭矩值:
A | 扭矩最大值 | B | 最小扭矩 |
C | 触发器扭矩 | D | 目标角度 |
扭矩(控制)/角度(控制)“或”
此策略引导操作员直接达到所需的目标扭矩和角度。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
A | 扭矩最大值 | B | 目标扭矩 |
C | 最小扭矩 | D | 触发器扭矩 |
E | 程序开始 | F | 最小角度 |
G | 目标角度 | H | 最大角度 |
绿色区域表示 OK 结果区。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间,角度介于最小角度和最大角度之间。
所有三个径向梯度 LED 均为红色:扭矩结果超过最大扭矩,或角度结果超过最大角度。
扭矩峰值:

扭矩与角度 A
扭矩最大值
B
目标扭矩
C
最小扭矩
D
第二个百分比
E
第一个百分比
F
程序开始
G
最小角度
H
目标角度
I
最大角度
角度峰值:
扭矩与角度 A
扭矩最大值
B
目标扭矩
C
最小扭矩
D
程序开始
E
第一个百分比
F
第二个百分比
G
最小角度
H
目标角度
I
最大角度
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当达到第一个百分比、第二个百分比、扭矩和角度处于最小和最大限值范围内,以及达到最大扭矩或最大角度时,信号增加。
如果在拧紧程序中指定了角度峰值,则蜂鸣器信号将监测角度而不是扭矩。
振动:
与第三个径向梯度 LED 一起启动。
扭矩/角度结果:
如果扭矩/角度未超过扭矩/角度限值,则在扭矩峰值或角度峰值处获取结果(根据拧紧程序中的规定)。
如果扭矩/角度超过限值,则按照以下方式获取结果:
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为扭矩峰值时,如果扭矩(或扭矩和角度)超过限值,则在扭矩峰值处获取结果。
H
当停止条件被设为扭矩峰值时,如果只有角度超过限值,则在角度峰值处获取结果。
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为角度时,如果角度(或扭矩和角度)超过限值,则在角度峰值处获取结果。
H
当停止条件被设为角度时,如果只有扭矩超过限值,则在扭矩峰值处获取结果。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器:
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
扭矩(控制)/角度(控制)“与”
此策略引导操作员直接达到所需的目标扭矩和角度。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
A | 扭矩最大值 | B | 目标扭矩 |
C | 最小扭矩 | D | 触发器扭矩 |
E | 程序开始 | F | 最小角度 |
G | 目标角度 | H | 最大角度 |
绿色区域表示 OK 结果区。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间,角度介于最小角度和最大角度之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩,或角度超过最大角度。
扭矩峰值:

扭矩与角度 A
扭矩最大值
B
目标扭矩
C
第二个百分比
D
第一个百分比
E
程序开始
F
目标角度
G
最大角度
角度峰值:
扭矩与角度 A
扭矩最大值
B
目标扭矩
C
程序开始
D
第一个百分比
E
第二个百分比
F
目标角度
G
最大角度
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当达到第一个百分比、第二个百分比、角度和目标值,以及最大扭矩时,信号增加。
如果在拧紧程序中指定了角度峰值,则蜂鸣器信号将监测角度而不是扭矩。
振动:
与第三个径向梯度 LED 一起启动。
扭矩/角度结果:
如果扭矩/角度未超过扭矩/角度限值,则在扭矩峰值或角度峰值处获取结果(根据拧紧程序中的规定)。
如果扭矩/角度超过限值,则按照以下方式获取结果:
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为扭矩峰值时,如果扭矩(或扭矩和角度)超过限值,则在扭矩峰值处获取结果。
H
当停止条件被设为扭矩峰值时,如果只有角度超过限值,则在角度峰值处获取结果。
扭矩与角度 A
扭矩最大值
B
最小扭矩
C
触发器扭矩
D
程序开始
E
最小角度
F
最大角度
G
当停止条件被设为角度峰值时,如果角度(或扭矩和角度)超过限值,则在角度峰值处获取结果。
H
当停止条件被设为角度峰值时,如果只有扭矩超过限值,则在扭矩峰值处获取结果。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器:
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
扭矩(控制)/有效扭矩(监测)
该策略指导操作员以当前扭矩将接头拧紧到扭矩目标值。当接头的当前扭矩值高于最终扭矩目标时,它特别有用。
该策略计算规定角度窗口长度内的当前扭矩值,以便从拧紧的绝对峰值扭矩值中减去当前扭矩值并确认是否实际达到想要的扭矩目标值。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭距目标值。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
延迟监控 | 在其之后必须开始角度读数的角度值。 |
开始角度距离 | 从贴合点沿反方向跨越的角度值,定义了角度窗口长度的开始位置。 |
窗口长度 | 计算补偿值的角度间隔。 |
补偿 | 确定拧紧结果的方法:
|
上限 | 获得 OK 结果的扭矩上限值。 上限必须 > 0 |
下限 | 获得 OK 结果的扭矩下限值。 下限必须 ≥ 0 |
使用值 | 定义如何计算角度窗口长度间隔内有效扭矩值的方法:
|
扭矩单位 | 此参数不可编辑。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
计算有效扭矩值的角度窗口长度以起始角度距离(从贴合点反方向测量)中设置的角度开始,由系统实时自动计算。然后,角度窗口会按照窗口长度中设置的角度度数向相反方向展开。 根据为拧紧操作设置的使用值计算出的有效扭矩值可以是窗口长度期间测得的平均扭矩值或峰值扭矩值。
A | 上限 | G | 窗口长度 |
B | 下限 | H | 开始角度距离 |
C | 触发器扭矩 | I | 延迟监控 |
D | 角度窗口长度期间的平均扭矩 | J | 峰值扭矩值通过减去当前扭矩进行补偿。 |
E | 角度窗口长度期间的峰值扭矩 | K | 无补偿的峰值扭矩值。 |
F | 贴合点 |
扭矩结果:
如果补偿被设为开启,则从绝对峰值扭矩值中减去计算出的当前扭矩值,扭矩最终结果值是扭矩峰值与当前扭矩值之间的差值。
如果补偿被设为关闭,则计算出的当前扭矩值不会从绝对峰值扭矩值中减去,扭矩最终结果值为拧紧的峰值。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于下限和上限之间。
所有三个径向梯度 LED 均为红色:扭矩超过上限。
蜂鸣器:
当扭矩超过程序开始值时开始;当达到第一个百分比、第二个百分比、第三个百分比时,信号增加。
振动:
与第三个径向梯度 LED 一起启动。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的结果指示器和持续时间的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
松开
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
结束循环时间 | 达到目标角度后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到目标角度值时开始。 |
此策略用于拧松已拧紧的螺钉。这通常用于多步骤程序的序列中。
例如:
将螺钉拧紧至 40 Nm
将螺钉拧松 30°
将螺钉拧紧至 50 Nm
在指定目标角度值处测得的扭矩结果。
如果目标角度保持为零,则此策略会自动查找扭矩/角度值,以检测拧松过程是否已完成。
如果指定了目标角度值, 则拧松必须达到目标角度值,才能认为结果 OK。
A | 扭矩最大值 | B | 目标扭矩 |
C | 最小扭矩 | D | 程序开始 |
E | 目标角度 |
绿色区域表示 OK 结果区。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
蜂鸣器:
当扭矩超过程序开始值时蜂鸣声响起;当达到目标角度/拧松过程完成时,信号增加。
振动:
当达到目标角度时开始。
拧紧操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
屈服点
该策略指导操作员将接头拧紧到屈服点。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 拧紧操作停止必须达到的角度值(从检测到的屈服点测量)。 目标角度必须 > 0。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
线性斜率系数 | 定义曲线线性部分接头刚度的系数。该系数表示扭矩/角度斜率,单位为 Nm/°。 默认值:0.5。最小值:0.1(也适用于比率小于 0.1 的非常软的接头)。 如果选择的测量单位并非 Nm,则线性斜率系数必须始终转换为 Nm/°。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |

A | 扭矩最大值 | E | 最小角度 |
B | 最小扭矩 | F | 目标角度 |
C | 扭矩触发器 | G | 最大角度 |
D | 程序开始 | H | 屈服点 |
目标角度是从检测到的屈服点测量的,而最小角度和最大角度是从触发扭矩测量的。
定义获得 OK 结果的扭矩限值。
扭矩结果:
如果检测到屈服点并达到目标角度(从检测到的屈服点开始测量),则在目标角度处获取扭矩结果。
如果操作员在屈服点之后但在达到目标角度之前停止拧紧,则扭矩结果为测得的最大扭矩。
如果扭矩超过最大扭矩限值,则不再检测到屈服点,扭矩结果为测得的最大扭矩。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
蜂鸣器:
当扭矩超过程序开始值时蜂鸣声响起;在检测屈服点后达到目标角度时,信号增加。
振动:
在检测屈服点后达到目标角度时开始。
测试操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED:
LED 根据为所用工具定义的结果指示器和持续时间的配置亮起。
如需了解更多信息,请参见 工具 LED。
蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
在屈服点策略配置中,有一个高级参数:线性斜率系数。该系数定义曲线线性部分的接头刚度。该系数表示扭矩/角度斜率,单位为 Nm/°。最小值为 0.1,也适用于比率小于 0.1 的极软接头。默认值为 0,5。
每个单个接头的线性斜率系数可通过实验计算得出(仅在进行试验测试以获得计算数据后),如下:

 = 线性斜率系数
= 线性斜率系数
如果为操作选择的测量单位不同于 Nm,则线性斜率系数必须转换为 Nm/°。
例如,对于刚度为 0.6 lbf*ft/° 的连接件,由于 1 lbf*ft = 1.3558 Nm,则线性斜率系数必须转换为:
0.6 lbf*ft/° → 0.6x1.3558 = 0.81 Nm/°
质量控制策略
质量控制策略的目的要么是通过测试接头上的剩余扭矩来检查已经执行的拧紧操作,要么是研究接头的特性。
只有当 STRwrench 连接到外部控制器时,才能使用这些策略。
剩余扭矩/角度
此策略通过查找扭矩/角度绘制图的剩余点,评估连接件的剩余扭矩。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
分离角度阈值 | 剩余扭矩的最大角度(从触发扭矩测得)。 |
剩余角度阈值 | 当剩余扭矩低于分离点时,剩余扭矩的最大角度(从触发扭矩处测得)。 |
仅为结果分离 | 启用此参数时,将禁用剩余点的检测。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
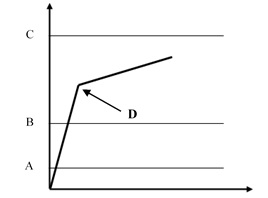
A | 程序开始 | B | 最小扭矩 |
C | 扭矩最大值 | D | 分离 = 剩余 |
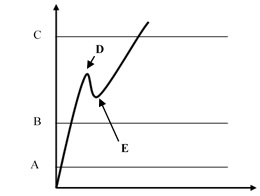
A | 程序开始 | B | 最小扭矩 |
C | 扭矩最大值 | D | 分离 |
E | 剩余 |
定义扭矩上限和下限,以获得 OK 结果。
触发扭矩必须大于程序开始点,它定义了设备算法开始分析扭矩/角度轨迹的起点。这种方法有利于过滤低扭矩值时可能出现的所有噪声,以免这些噪声被误检测为剩余点。
扭矩结果:
如果检测到剩余点,则结果与剩余点关联;如果剩余点在限值范围内,则测试 OK。
如果未检测到剩余点或扭矩超过最大扭矩,则扭矩结果为测得的最大值。因此,如果最大值在限值范围内,则扭矩结果仍然为 Ok,但总体结果被标记为 Not OK。
如果扭矩超过最大扭矩限值,则不再检测剩余扭矩,扭矩结果为最大扭矩。
在剩余扭矩/角度的配置中,有两个高级参数:
分离角度阈值:它指定剩余扭矩的最大角度(从触发扭矩测得)。
剩余角度阈值:当剩余扭矩低于分离点时,它指定了剩余扭矩的最大角度(从触发扭矩处测得)。
如果剩余点在剩余角度阈值之前,则检测剩余扭矩。这是剩余扭矩测试的正常条件。
如果剩余点超过剩余角度阈值,则分离点为测试结果。在这种情况下,剩余角度阈值应增大以检测正确的剩余点。
如果分离点超过分离角度阈值,则即使剩余点在剩余角度阈值之前,也不会检测到剩余点
测试操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当检测到剩余扭矩/拧紧过程完成时,信号增加。
振动:
检测到剩余扭矩时开始。
测试操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
剩余点检测算法
为检测扭矩/角度剩余点,STRwrench 采用了一种算法,每次采集新样本时都会通过线性回归计算扭矩/角度轨迹的梯度 αt。然后,该算法计算六个不同 αt 值的平均值:

αaverage 值用于确定剩余点。
算法应用场景
场景 A
当高静摩擦力积聚在接头处时(例如由于缺乏润滑),一旦螺栓移动,扭矩就会下降,实际剩余扭矩低于克服静摩擦力所需的峰值扭矩。在这种情况下,STRwrench 算法会监测 αaverage:如果 αaverage 为负值,则算法会等待,直到 αaverage 变回正值。αaverage 回到正值的点被视为剩余扭矩点。

A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |
场景 B
通常,在分离期间,当螺栓开始移动时,扭矩/角度函数的梯度会出现快速变化。STRwrench 算法将扭矩/角度轨迹与从图形原点到轨迹实际点绘制的直线之间的最大距离 (d) 点作为分离点。此距离必须大于阈值,且必须对于多个样本都保持一致。
此外,分离点之后的轨迹部分的平均斜率必须小于分离点之前的迹线部分的平均斜率的 60%。
如果满足所有这些条件,则测试结束,并检测到分离/剩余点。
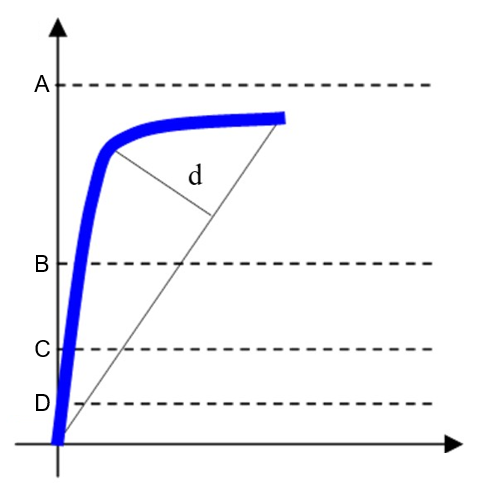
A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |
d | 轨迹与直线之间的最大距离。 | ||
推荐设置
循环起始点 | 设置一个大于等于 smartHEAD 容量的 2% 的值。 |
最终角度监测扭矩 | 在循环开始和最小扭矩之间设置一个值。 |
最小扭矩 | 设置最小剩余扭矩值,以获得 OK 结果。 |
最大扭矩 | 设置最大剩余扭矩值,以获得 OK 结果。 |
例如,使用带有 80 N∙m smartHEAD 的 STRwrench 检测拧紧到 50 N∙m 的螺栓上的剩余点时,正确的设置如下:

A | 最大扭矩 | B | 最小扭矩 |
C | 最终角度监测扭矩 | D | 循环起始点 |
剩余扭矩/峰值
当峰值扭矩是进一步转动螺钉的必要条件时,此策略用于评估接头的剩余扭矩。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 角度目标。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |
使用此策略时,不会自动检测分离点。因此,这是一种客观性稍差的剩余扭矩评估方法。无法实施扭矩/时间或扭矩/角度方法时,可使用此方法。
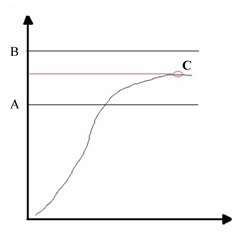
A | 最小扭矩 | B | 扭矩最大值 |
C | 扭矩峰值 |
定义扭矩限值,以获得 OK 结果。
如果未指定目标角度值,则角度结果被标记为不适用。
如果已指定目标角度值,则剩余扭矩结果在指定角度(从触发扭矩开始)而不是峰值扭矩处测得:
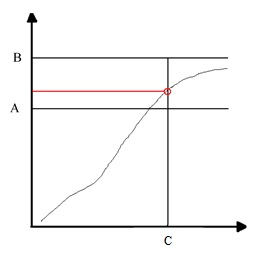
A | 最小扭矩 | B | 扭矩最大值 |
C | 目标角度 |
测试操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当检测到剩余扭矩/拧紧过程完成时,信号增加。
振动:
如果指定了目标角度,则在检测到剩余扭矩时开始。
测试操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
屈服点(接头分析)
这种策略通过测量屈服点来评估接头的刚度。
参数 | 描述 |
|---|---|
所需 TAG 号 | 必须在端头配件工具的 TAG 中写上一个特定的数字。 |
名称 | 拧紧程序的名称。 |
程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限。 |
扭矩最大值 | 扭矩上限。 |
最大扭矩限值 | 如果施加的扭矩达到此限值,则扳手显示屏上会显示消息更换螺钉。 |
目标扭矩 | 扭矩目标。 |
触发器扭矩 | 开始角度测量的扭矩值(通常设置为目标扭矩的 50%)。 |
最小角度 | 角度下限。 |
最大角度 | 角度上限。 |
目标角度 | 对于接头分析操作,目标角度通常设置为 0。 |
扭矩单位 | 此参数不可编辑。 |
重复拧紧角度限制 | 如果在指定角度内达到最小扭矩值,则扳手显示屏上将显示接头已拧紧消息。 |
停止条件 | 在扭矩峰值和角度峰值之间选择。 |
线性斜率系数 | 定义曲线线性部分接头刚度的系数。该系数表示扭矩/角度斜率,单位为 Nm/°。 默认值:0.5。最小值:0.1(也适用于比率小于 0.1 的非常软的接头)。 如果选择的测量单位并非 Nm,则线性斜率系数必须始终转换为 Nm/°。 |
扭矩校正系数 | 当使用加长件时,可能会补偿扳手测量值,以显示更准确的扭矩值。如需计算校正系数,请参阅 。 当未使用加长件时,扭矩校正系数 = 1。 |
角度校正 | 当加长件导致扳手发生更大弯曲时,可能会补偿扳手角度测量值,以显示更准确的角度值。 当未使用加长件时,角度校正 = 0。 |
批次大小 | 批次将要执行的拧紧次数。 |
最大连续 NOK 次数 | 获得 OK 结果所接受的连续 NOK 数量。 |
结束循环时间 | 达到第三个百分比后,当扭矩低于程序开始值时开始。 |
棘轮作用时间 | 当扭矩低于程序开始值而未达到第三个百分比值时开始。此功能允许操作员在拧紧操作期间释放扭矩一段时间并进行休整。 |

A | 扭矩最大值 | C | 程序开始 |
B | 最小扭矩 | D | 屈服点 |
定义扭矩限值,以获得 OK 结果。
在接头分析中,不要用扭矩上下限来设定一个狭窄的范围,而是定义一个更宽的区域来检测屈服点。
为角度上下限定义一个较宽的范围(例如,最小角度设为 0°,最大角度设为 999°)。
拧紧操作过程中,LED、蜂鸣器和振动将按如下方式激活:
LED:
白色 LED:当扭矩值超过 smartHEAD 的最小负载值时激活。
当达到为所用工具定义的三个阈值时,第一、第二和第三个径向梯度 LED 依次变绿。
如需了解更多信息,请参见 工具 LED。所有三个径向梯度 LED 均为绿色:扭矩介于最小扭矩和最大扭矩之间。
所有三个径向梯度 LED 均为红色:扭矩超过最大扭矩。
蜂鸣器:
当扭矩超过程序开始值时,蜂鸣声响起;当检测到屈服点/拧紧过程完成时,信号增加。
振动:
检测到屈服点时开始。
测试操作结束时,LED、蜂鸣器和振动将按如下方式激活:
LED 根据为所用工具定义的“结果指示器”和“持续时间”的配置亮起。
如需了解更多信息,请参见 工具 LED。蜂鸣器
两声蜂鸣声表示操作结束;如果最终结果位于红色区域,则信号持续。
若要使蜂鸣器停止,请重新开始拧紧操作或按下工具控制器上的按钮。
振动:
保持活动状态,直到所施加的扭矩被释放。
在屈服点策略配置中,有一个高级参数:线性斜率系数。该系数定义曲线线性部分的接头刚度。该系数表示扭矩/角度斜率,单位为 Nm/°。最小值为 0.1,也适用于比率小于 0.1 的极软接头。默认值为 0,5。每个单个接头的线性斜率系数可通过实验计算得出(仅在进行试验测试以获得计算数据后),如下:
= 线性斜率系数
如果为操作选择的测量单位不同于 Nm,则线性斜率系数必须转换为 Nm/°。
例如,对于刚度为 0.6 lbf*ft/° 的接头,由于 1 lbf*ft = 1.3558 Nm,则线性斜率系数必须转换为:
0.6 lbf*ft/° → 0.6x1.3558 = 0.81 Nm/°
加长件修正系数
当接头设计或空间限制影响使用标准套筒或工具时,可能需要使用专用的加长扳手来满足应用要求。在这些情况下,可对 STRwrench 测量予以足够的补偿,因为原厂校准是针对标准臂进行的,而加长臂会根据其长度成比例地增加所测量的扭矩。鉴于在施加扭矩时的特定扭转,测得的角度也会受加长件影响。
在 STRwrench 上使用扭矩倍增器时,施加在接头上的扭矩大于扳手产生的扭矩;在这种情况下,扭矩修正系数用于调整扳手的扭矩读数。角度测量也会受到影响,但扳手不会补偿角度测量。
如何计算扭矩校正系数

D | 显示的扭矩值 | T | 施加的扭矩 |
L | 标准臂(从手柄的中心到端头配件工具的中心) | L+E | 总臂 |
E | 加长臂 |
根据显示的扭矩和施加的扭矩之间的关系  ,扭矩校正系数通过以下公式得出:
,扭矩校正系数通过以下公式得出:
扭矩校正系数 = 
扭矩校正系数会改变扳手的扭矩测量值;该系数的错误值可能会导致扭矩读数不正确,以及以与预期不同的目标扭矩进行拧紧的风险。确保在使用加长件时计算出正确的值。
对于不搭配扳手加长件使用的端头配件工具而言,扭矩校正系数必须保持设定为 1。
使用加长件时,操纵位置会影响扭矩读数。始终将手放在 STRwrench 手柄的中心。
如果在 STRwrench 上使用扭矩倍增器,应将扭矩校正系数设为与扭矩倍增器的扭矩倍增系数相等。
扭矩校正系数由以下公式由以下公式求出:
扭矩校正系数 = 扭矩输出 / 扭矩输入
如何计算角度校正
当使用扳手加长件时,角度校正允许根据施加的扭矩对加长件扭矩进行线性补偿。校正值以 smartHEAD 最大扭矩时的度数表示。
在 Power Focus 上,用以下值配置一个扭矩(控制)/角度(监测) 拧紧程序:
旋入完成扭矩 = smartHEAD 最小扭矩值(smartHEAD 最大扭矩的 5%)
最终角度监测扭矩 = 旋入完成扭矩
目标扭矩 = smartHEAD 最大扭矩的 75%
以 smartHEAD 最大扭矩的 75% 进行三次拧紧。
对于每个测得的扭矩和角度值,进行以下计算:
角度校正 = 测得的角度 x(smartHEAD 最大扭矩 - smartHEAD 最小扭矩)/(测得的扭矩 - smartHEAD 最小扭矩)
确保计算出的最小和最大角度值的差异不超过计算出的最大值的 10%:
角度校正max - 角度校正min ≤ 角度校正max / 10
如果差异超过 10%,请从头开始重复该程序。
对计算出的三个角度值取平均值,以获得角度校正。
当在 STRwrench 上使用扭矩倍增器时,角度校正值必须保持为零;在这种情况下,STRwrench 无法补偿角度测量值。
I/O 扩展模块和多层警示灯信号
输出信号
信号 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] | 涵义 |
|---|---|---|---|---|---|
批次完成 - 30 | 事件 | 布尔 | 1 | 1 | 批次已完成是当批次完成时触发的输出信号。批次结果状态(OK 或 NOK)对批次已完成信号没有影响。 |
批次完成 NOK - 37 | 事件 | 布尔 | 1 | 1 | 批次完成,状态 NOK。 |
批次完成 OK - 36 | 事件 | 布尔 | 1 | 1 | 批次完成,状态 OK。 |
批次运行 - 32 | 状态 | 布尔 | 1 | 1 | 表示批次序列中的一个批次正在运行。 |
批次序列完成 NOK - 46 | 事件 | 布尔 | 1 | 1 | 批次序列完成,状态 NOK。 |
批次序列完成 OK - 45 | 事件 | 布尔 | 1 | 1 | 批次序列完成,状态 OK。 |
批次序列完成 - 48 | 事件 | 布尔 | 1 | 1 | 指示序列何时完成,有“批次序列完成 OK”和“批次序列完成 NOK”两种情况。 |
批次序列运行 - 47 | 状态 | 布尔 | 1 | 1 | 指示批次序列是否正在运行。 |
高角度 - 10 | 事件 | 布尔 | 1 | 1 | 角度结果高于最大角度限值。 |
高扭矩 - 7 | 事件 | 布尔 | 1 | 1 | 扭矩结果高于最大扭矩限值。 |
收到的标识符 - 100 | 事件 | 布尔 | 1 | 1 | 系统接收到的标识符。 |
低角度 - 9 | 事件 | 布尔 | 1 | 1 | 角度结果低于最小角度限值。 |
低扭矩 - 6 | 事件 | 布尔 | 1 | 1 | 扭矩结果低于最小扭矩限值。 |
达到最大连续 NOK - 35 | 事件 | 布尔 | 1 | 1 | 达到最多连续 NOK 拧紧计数器。 |
开放协议断开 - 95 | 状态 | 布尔 | 1 | 1 | 如果在虚拟站点中将开放协议设置为关闭,则“开放协议断开”信号被设置为假。如果在虚拟站点中将开放协议设置为开启,则“开放协议断开”信号被设置为真。当至少一个客户端(几个开放协议客户端可以连接到同一虚拟站点)连接时,“开放协议断开”信号将设置为假。 |
序列中止 - 160 | 事件 | 布尔 | 1 | 1 | 序列已取消。 |
拧紧已锁定 - 27 | 状态 | 布尔 | 1 | 1 | 拧紧已禁用;不可能进行任何拧紧。 |
拧紧 NOK - 4 | 事件 | 布尔 | 1 | 1 | 至少一个拧紧结果超出规定限值。 |
拧紧 OK - 3 | 事件 | 布尔 | 1 | 1 | 拧紧结果在规定限制范围内。 |
工具电池电量低 - 90 | 状态 | 布尔 | 1 | 1 | 工具电池电量低于某个阈值。 |
工具禁用 - 158 | 状态 | 布尔 | 1 | 1 | 工具禁用是一个输出信号,当工具被外部禁用时激活: |
工具启用 - 159 | 状态 | 布尔 | 1 | 1 | 工具启用是一个输出信号,当工具未被外部禁用时激活: |
工具运行 - 23 | 状态 | 布尔 | 1 | 1 | 表示工具正在转动(顺时针 [CW] 或逆时针 [CCW])。 |
输入信号
信号 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] | 描述 |
|---|---|---|---|---|---|
中止序列 - 10012 | 事件 | 布尔 | 1 | 1 | 接收到批次序列中止请求时,批次序列功能仅在获得正在进行的拧紧结果后才中止批次序列。 |
批次递减 - 10002 | 事件 | 布尔 | 1 | 1 | 批次计数以 1 为单位递减。 |
批次递增 - 10001 | 事件 | 布尔 | 1 | 1 | 批次计数以 1 为单位递增。 |
旁路拧紧程序 - 10008 | 事件 | 布尔 | 1 | 1 | 在正在运行的批次序列中跳过下一个拧紧程序。 |
重置批次 - 10003 | 事件 | 布尔 | 1 | 1 | 批次计数器重置为 0。无批次 OK(nxOK)。如果激活批次 OK,则它会被停用。 |
重置批次序列 - 10053 | 事件 | 布尔 | 1 | 1 | 重置批次序列。 |
输入/输出信号
信号 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] | 描述 |
|---|---|---|---|---|---|
禁用开放协议命令 - 10060 | 状态 | 布尔 | 1 | 1 | 禁用通过开放协议向虚拟站点发送命令的可能性。 |
第三方许可证列表
STRwrench 控制器包含第三方组件,其许可证要求我们发布许可语言和/或版权声明的副本。根据这些要求,在此提供许可证的副本。点击下方任意许可证,即可显示许可证文本的副本。
软件 | 版本 | 许可证 |
|---|---|---|
acl | 2.2.52 | |
alsa-lib | 1.1.2 | |
alsa-state | 0.2.0 | |
alsa-tools | 1.1.0 | |
alsa-utils | 1.1.2 | |
anybus | 1.1 |
|
atftp | 0.7.1 + gitAUTOINC + be3291a18c | |
attr | 2.4.47 | |
barebox | 2018.06.0 | |
base-files | 3.0.14 | |
base-files-px2-base | 1.0 | |
base-passwd | 3.5.29 | |
bash | 4.3.30 | |
bash-completion | 2.4 | |
bluez5 | 5.41 | |
boost | 1.61.0 | |
busybox-px2base | 1.24.1 | |
bzip2 | 1.0.6 | |
ca-certificates | 20160104 | |
cppunit | 1.13.1 | |
cryptodev-linux | 1.8 | |
curl | 7.50.1 | |
db | 3.0.35 | |
dbus | 1.10.10 | |
dhcp | 4.3.4 | |
dosfstools | 4.0 | |
dt-utils | 2017.03.0 | |
e2fsprogs | 1.43 | |
ecryptfs-tools | 1.0 | |
elfutils | 0.166 | |
eudev | 3.2.2 | |
expat | 2.2.0 | |
fbset | 2.1 | |
fb-test | 1.1.0 | |
fcgi | 2.4.0 | |
finit | 3.1 | |
firmware-imx | 5.4 |
|
flac | 1.3.1 | |
flatbuffers | 1.9.0 | |
fruit | 3.4.0 + gitAUTOINC + ece0f7218c | |
fuse | 2.9.4 | |
gcc-runtime | 6.2.0 | |
gdb | 8.0.1 | |
gdbm | 1.12 | |
glib-2.0 | 2.48.2 | |
glibc | 2.24 | |
gmp | 6.1.1 | |
gnutls | 3.5.3 | |
grep | 2.25 | |
gstreamer1.0 | 1.8.3 | |
gstreamer1.0-plugins-base | 1.8.3 | |
hostpad | 2.6 | |
htop | 1.0.3 | |
icu | 57.1 | |
init-ifupdown | 1.0 | |
initscripts | 1.0 | |
iproute2 | 4.7.0 | |
iptables | 1.6.0 | |
ipwatchd | 1.2 | |
iw | 4.7 | |
json-spirit | 4.08 | |
keyutils | 1.5.9 | |
kmod | 23 + gitAUTOINC + 65a885df5f | |
kmsfbwrap-px2base | 12.0 | |
libarchive | 3.2.2 | |
libbsd | 0.8.3 |
|
libcap | 2.25 | |
libdrm | 2.4.70 | |
libestr | 0.1.10 | |
libevent | 2.0.22 | |
libfastjson | 0.99.4 | |
libffi | 3.2.1 | |
libgcc | 6.2.0 | |
libgcrypt | 1.7.3 | |
libgpg-error | 1.24 | |
libidn | 1.33 | |
libite | 2.0.2 | |
libjpeg-turbo | 1.5.0 | |
liblogging | 1.0.5 | |
libnet | 1.2-rc3 | |
libnfsidmap | 0.25 | |
libnl | 3.2.28 | |
libogg | 1.3.2 | |
libpcap | 1.8.1 | |
libpcre | 8.39 | |
libpng | 1.6.24 | |
librcf | 2.2.0.0 | |
libsamplerate0 | 0.1.8 | |
libsndfile1 | 1.0.27 | |
libtinyxml | 2.6.2 | |
libtirpc | 1.0.1 | |
libuev | 2.2.0 | |
libusb1 | 1.0.20 | |
libvorbis | 1.3.5 | |
libxml2 | 2.9.4 | |
libxslt | 1.1.29 | |
lighttpd | 1.4.51 | |
linux-atlas | 4.14 | |
linux-libc-headers | 4.14.13 | |
logrotate | 3.9.1 | |
lua | 5.1.5 | |
luabind | git | |
lzo | 2.09 | |
lzop | 1.03 | |
memlog | 2.0 | |
mesa | 12.0.1 | |
mg | 20161005 |
|
minizip | 1.2.8 | |
mmc-utils | 0.1 | |
mtd-utils | 1.5.2 | |
nano | 2.2.5 | |
ncurses | 6.0 + 20160625 | |
netbase | 5.3 | |
netcat-openbsd | 1.105 | |
nettle | 3.2 | |
nfs-utils | 2.1.1 | |
ntp | 4.2.8p8 | |
openssh | 7.6p1 | |
openssl | 1.0.2n | |
opkg | 0.3.3 | |
opkg-arch-config | 1.0 | |
opkg-utils | 0.3.2 + gitAUTOINC + 3ffece9bf1 | |
orc | 0.4.25 | |
os-release | 1.0 | |
packagegroup-atlas-qt5 | 1.0 | |
packagegroup-atlas-sxb | 1.0 | |
packagegroup-base | 1.0 | |
packagegroup-core-boot | 1.0 | |
packagegroup-core-eclipse-debug | 1.0 | |
packagegroup-core-nfs | 1.0 | |
packagegroup-core-ssh-openssh | 1.0 | |
packagegroup-px2it | 1.0 | |
parted | 3.2 | |
perl | 5.22.1 | |
pm-utils | 1.4.1 | |
poco | 1.9.0 | |
pointercal | 0.0 | |
popt | 1.16 | |
procps | 3.3.12 | |
protobuf | 2.6.1 + gitAUTOINC + bba83652e1 | |
python | 2.7.12 | |
qtbase | 5.7.1 + gitAUTOINC + a55f36211e | |
qtdeclarative | 5.7.1 + gitAUTOINC + 2a992040e2 | |
qtlocation | 5.7.1 + gitAUTOINC + de5be121d8 | |
qtsensors | 5.7.1 + gitAUTOINC + 5a57beaaa5 | |
qtwebkit | 5.7.1 + gitAUTOINC + 76e2732f01 | |
qtwebsockets | 5.7.1 + gitAUTOINC + 60cede232a | |
qtxmlpatterns | 5.7.1 + gitAUTOINC + 89dbcc4f80 | |
rauc | 0.4 | |
readline | 6.3 | |
rpcbind | 0.2.3 | |
rsync | 3.1.2 | |
rsyslog | 8.22.0 | |
run-postinsts | 1.0 | |
shadow | 4.2.1 | |
shadow-security | 4.2.1 | |
sqlite3 | 3.14.1 |
|
squashfs-tools | 5.7.1 + gitrAUTOINC + 9c1db6d13a |
|
st-load | 1.0 |
|
stm32flash | git | |
strace | 4.13 | |
sysfsutils | 2.1.0 | |
sysvinit-bootlogd | 2.88dsf | |
tcf-agent | 1.4.0 + gitAUTOINC + 2dddd5f440 | |
tcpdump | 4.7.4 | |
tcp-wrappers | 7.6 | |
tslib | 1.1 | |
tzdata | 2016i |
|
u-boot-atlas | 2017.09 | |
u-boot-fw-utils | 2017.09 | |
unzip | 6.0 | |
usbutils | 008 | |
util-linux | 2.28.1 | |
wireless-tools | 30.pre9 | |
wpa-supplicant | 2.5 | |
xerces-c | 2.7.0 | |
xz | 5.2.2 | |
yaml-cpp | 0.6.2 | |
zip | 3.0 | |
zlib | 1.2.8 |