緩め
パラメーター | 説明 |
|---|---|
必要なタグ番号 | エンドフィッティングツールの TAG には特定の番号を書き込む必要があります。 |
名称 | 締め付けプログラムの名前。 |
プログラム開始 | 締め付け操作を開始するトルク値。 |
最小トルク | トルク下限。 |
最大トルク | トルク上限。 |
最大トルク限度 | 加えられたトルクがこの制限に達すると、レンチディスプレイに ネジの交換 というメッセージが表示されます。 |
目標角度 | 目標の角度。 |
トルクの単位 | このパラメーターは編集できません。 |
トルク補正係数 | 延長を使用すると、レンチの測定値が補正されることがあり、より正確なトルク値が表示される場合があります。補正係数を計算するには、 を参照してください。 延長を使用しない場合、トルク補正係数 = 1 になります。 |
角度補正 | 延長によってさらにレンチが曲がる場合は、レンチ角度の測定値を補正して、より正確な角度値を表示することができます。 延長を使用しない場合、角度補正 = 0 になります。 |
バッチサイズ | バッチが実施する締め付け数 |
終了サイクル時間 | 角度が目標角度に到達した後、トルクがプログラム開始を下回った時点で開始します。 |
ラチェット時間 | 角度が目標角度に到達せず、トルクがプログラム開始を下回った時点で開始します。 |
この戦略は、締め付けられたネジを緩めるために使用されます。これは通常、マルチステッププログラムのシーケンスで使用されます。
例:
ネジを 40 Nm のトルクまで締めます
ネジを 30°緩めます
ネジを 50 Nm のトルクまで締めます
トルク結果は、指定された目標角度値で測定されます。
目標角度がゼロのままの場合、この戦略はトルク/角度の値を自動的に探して、緩めるプロセスが完了したかどうかを検出します。
目標角度の値を指定した場合、緩めの結果が OK と見なされるには、目標角度の値に達する必要があります。
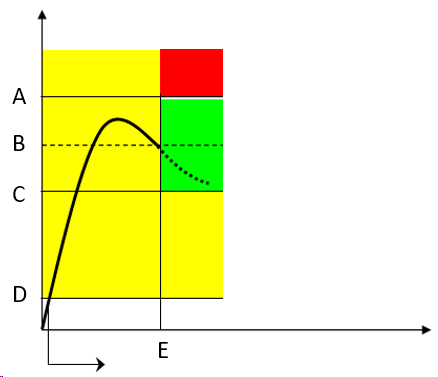
A | 最大トルク | B | 目標トルク |
C | 最小トルク | D | プログラム開始 |
E | 目標角度 |
緑色領域は OK 結果領域を定義します。
締め付け操作中、LED、ブザー、バイブレーションは次のように作動します:
LED:
白色 LED: トルク値が smartHEAD の最小負荷値を超えると作動します。
使用中のツールに設定された 3 つのしきい値に達すると、1 番目、2 番目、3 番目のラジアルグラデーション LED が順番に緑色に点灯します。
詳細については、ツール LED を参照してください。3 つのラジアルグラデーション LED すべてが緑色: トルクが最小トルクと最大トルクの間にあります。
3 つのラジアルグラデーション LED すべてが赤色: トルクが最大トルクを超えています。
ブザー:
トルクがプログラムの開始値を超えるとビープ音が鳴り、目標角度に達するか、緩めプロセスが完了すると信号が増加します。
バイブレーション:
目標角度に達すると開始します。
締め付け操作の終了時に、LED、ブザー、バイブレーションは次のように作動します:
LED は、使用中のツールに定義されている結果インジケーターと持続時間の構成に従って動作します。
詳細については、ツール LED を参照してください。ブザー
2 回のビープ音は操作の終了を示します。最終結果が赤色の領域にある場合、信号は継続して出ます。
ブザーを停止するには、新しい締め付け操作を開始するか、ツールコントローラーのボタンを押します。
バイブレーション:
加えられたトルクがかからなくなるまで持続します。









































