Descripción general de las etapas disponibles
Las etapas siguientes están disponibles para crear programas de apriete Multistep:
W - Esperar
En esta etapa la herramienta espera durante el tiempo especificado. La herramienta no gira mientras espera.
La herramienta espera el tiempo especificado. Si la posición en espera se establece en On, la herramienta mantiene la posición durante el Tiempo de espera.
SR - Liberación de boca
Esta etapa opera la herramienta con velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Solo se puede emplear esta etapa como última etapa en la ruta de apriete de un programa de apriete de múltiples etapas. Sin embargo, es posible añadir un punto de sincronización después de este paso.
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Predeterminado: 3º , debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
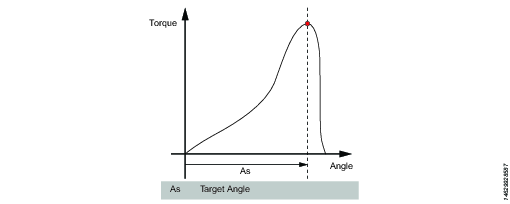
A – Apretar hasta ángulo / Aflojar hasta ángulo
A – Apretar hasta ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
A – Aflojar hasta ángulo
Esta etapa opera la herramienta con la velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Parámetros
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
TrR – Aflojar hasta liberar el gatillo
Esta etapa opera en sentido contrario hasta que se libera el gatillo de la herramienta (aflojar). Solo se puede utilizar como última etapa en un programa.
Parámetro | Descripción |
|---|---|
Velocidad | Valor numérico para la velocidad de rotación, en rpm. |
Tipo de rampa de velocidad | Lista de opciones donde se puede seleccionar la rampa de velocidad [dura, suave, manual] |
TTTR – Apretar hasta liberar el gatillo
Esta etapa opera hasta que se libera el gatillo de la herramienta (apretar). Solo se puede utilizar como última etapa en un programa de apriete.
Parámetro | Descripción |
|---|---|
Velocidad | Valor numérico para la velocidad de rotación, en rpm. |
Tipo de rampa de velocidad | Lista de opciones donde se puede seleccionar la rampa de velocidad [dura, suave, manual] |
T - Apretar hasta par / Aflojar hasta par
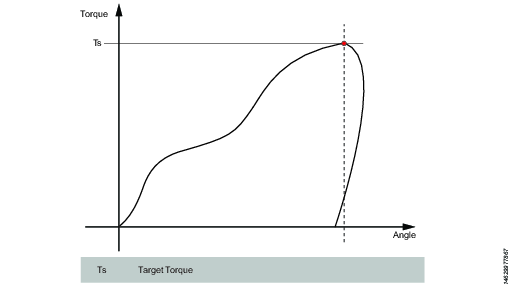
T - Apretar hasta par
Esta etapa opera la herramienta con la velocidad programada en la dirección hacia adelante hasta que se alcanza el par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
T – Aflojar hasta par
Esta etapa opera la herramienta con la velocidad n hacia atrás. Para que se active la etapa, el par debe superar primero el 110 % del par objetivo. El par objetivo debe tener un valor positivo. Después de alcanzar el par objetivo, se ejecutará el paso hasta que el par caiga por debajo del par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
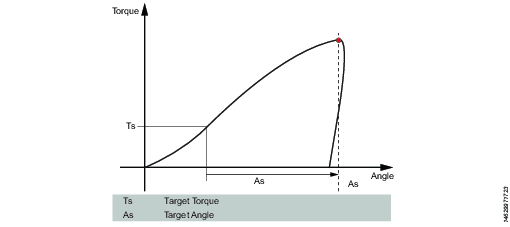
T+A – Apretar hasta par más ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. Desde este punto continúa operando un ángulo objetivo adicional.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
T|A – Apretar hasta par o ángulo
Este paso hace funcionar la herramienta a la velocidad n en la dirección de avance hasta que se alcanza el primer objetivo de par o de ángulo. Las mediciones de par y ángulo empiezan al comienzo del paso.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
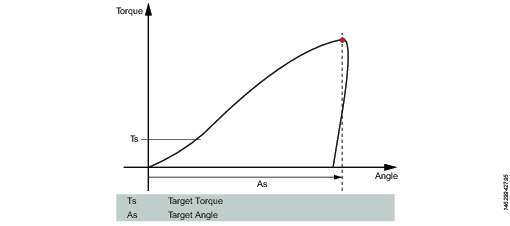
T&A – Apretar hasta par y ángulo
La herramienta funciona a la velocidad especificada en la dirección de avance hasta que se alcanzan tanto par objetivo como el ángulo objetivo. El par objetivo y el ángulo objetivo deben ser > 0.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Predeterminado: 0. Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
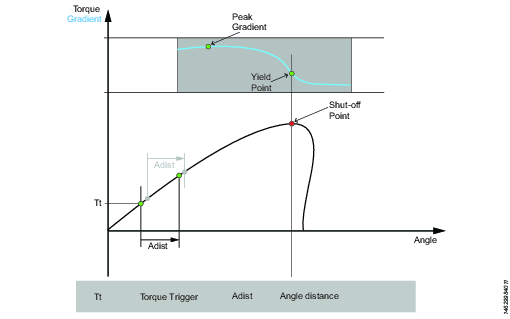
Y – Apretar hasta límite elástico
Esta estrategia opera la herramienta con la velocidad en la dirección hacia adelante hasta que se detecta el límite elástico. El límite elástico se encuentra monitorizando la gradiente desde el punto en el que el par supera el nivel del Par del gatillo, calculado según las mediciones de distancia del par y el ángulo. El parámetro de distancia del ángulo se establece según la dureza especificada de la junta.
Establecer la Ventana del ángulo de gradiente (para una junta dura, una junta blanda o para establecer manualmente la ventana del ángulo). Si se selecciona Manual, debe establecerse la Ventana del ángulo. Una junta se considera dura si el tornillo se aprieta hasta su par completo y gira 30 grados o menos después de apretarse hasta su punto de asentamiento. Una junta blanda gira 720 grados o más después de apretarse hasta su punto de asentamiento. El parámetro de dureza define la ventana del ángulo para calcular la gradiente. Cuanto más dura sea la junta, más pequeña es la ventana del ángulo.
Parámetro | Descripción |
|---|---|
Ventana de ángulo de gradiente | Especifica Ventana de ángulo:
|
Ventana de ángulo | Disponible cuando Ventana de ángulo de gradiente se establece en Manual. Debe ser > 0 y <=100. |
Par del gatillo | La medición del ángulo comienza en este punto de activación. Debe ser >= 0 e < Par máx. de herramienta. |
Amortiguación | Frecuencia con la cual se calcula el gradiente. Debe ser > 0 y < 100 y < Ventana de ángulo. |
Porcentaje de límite elástico | Debe ser >=20 % |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Tipo de filtro de par | El tipo de filtro:
|
Frecuencia de desconexión | Es necesario especificarla cuando se define Tipo de filtro de par como Pase bajo:
|
Número de muestras | Es necesario especificarla cuando se define Tipo de filtro de par como Media móvil:
|
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
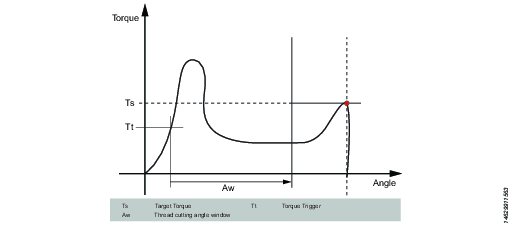
ThCT – Corte de rosca hasta par
La función Corte de rosca hasta par activa el apriete en el que el par de aproximación requerido es superior al par de Aproximación completa, por ejemplo cuando se aprietan capas finas de metal utilizando tornillos autorroscantes. La herramienta opera hacia adelante hasta que se alcanza el Ángulo de corte de rosca (Aw). La ventana del ángulo de corte de rosca se mide desde que el par supera por primera vez el Par de gatillo de corte de rosca (Ttc). Desde el punto en que se alcanza el ángulo de corte de rosca, la etapa continúa hasta que se alcanza el Par objetivo (Tt).
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ventana de ángulo de corte de rosca | Predeterminado: 0. Debe ser > 0 |
Par del gatillo | La medición del ángulo comienza en este punto de activación. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
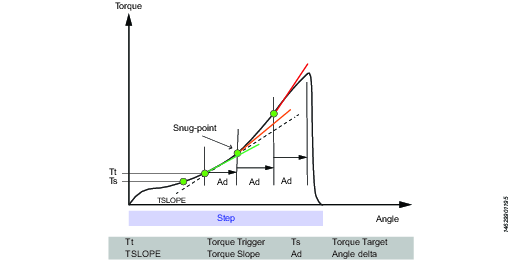
RD – Aproximación
La etapa de aproximación forma parte del apriete desde que el tornillo entra en la rosca hasta justo antes de que la cabeza del tornillo toque la superficie subyacente y se alcance el punto de asentamiento. El par necesario durante la aproximación no contribuye a ninguna fuerza de amarre.
Esta etapa hace funcionar la herramienta con la velocidad en dirección de avance y, dependiendo del Tipo de aproximación, par o asentamiento, la conducta de la etapa es la que sigue:
Tipo de aproximación: Hasta par: La etapa se detiene cuando se encuentra el par objetivo especificado.
Tipo de aproximación: Hasta asentamiento: El cálculo de la gradiente de ajuste empieza en el nivel de activación de par especificado Tt. Si no se establece la activación por par, se inicia el cálculo de la gradiente al comenzar la etapa.
El cálculo de la pendiente se realiza entre dos puntos de ángulo Ad grados de separación y se calcula como: (Tn – Tn-1) / (An – An-1) y en cuanto las dos pendientes consecutivas son mayores que TSLOPE se encuentra el punto de asentamiento.
Parámetro | Descripción |
|---|---|
Tipo de aproximación | Hasta par o Hasta asentamiento. |
Par objetivo | Predeterminado: «No config.» Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo Rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Par del gatillo | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Par de gatillo. Predeterminado: «No config.» Debe ser > 0 |
Ángulo delta | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Ángulo delta. Predeterminado: "0". Debe ser > 0 |
Régimen de par | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Régimen de par. Predeterminado: "0". Debe ser > 0 |
Freno (solo válido para controladores PF6 Flex y PF6 Stepsync). | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Acoplar (E)
Esta etapa opera la herramienta en ambas direcciones hasta que la boca acopla con el tornillo. La etapa continúa hasta que se alcanza el Par objetivo o Ángulo objetivo, siempre que se haya establecido la opción Continuar si no acopla en Sí. Si se alcanza el ángulo objetivo en cualquiera de las direcciones, ésta se invertirá. Limitar las iteraciones de búsqueda introduciendo el Máx. de intentos de acople. Si se alcanza el par objetivo en cualquiera de las direcciones, finalizará la etapa con el estado OK.
Ext - Resultado externo
El resultado externo es una estrategia que se emplea cuando se indica un apriete correcto (OK) con una señal digital externa (y no con valores de par o ángulo medidos durante el apriete). Esta señal externa se puede facilitar a través de cualquier medio que pueda transmitir una señal digital a la herramienta.
Cuando se envía la señal, la vista de resultados (datos registrados) mostrará el valor del parámetro objetivo que figura en el programa de apriete (valor de par especificado, valor de ángulo o cadena de texto). Estos valores (par y ángulo) no representan los valores medidos reales, sino solo el texto introducido.
Parámetro | Descripción |
|---|---|
Par <Par objetivo> | Valor numérico del valor de par objetivo mostrado deseado. Una señal podría proceder por ejemplo de una llave de clic y mostrar <Par objetivo>. |
Ángulo <Ángulo objetivo> | Valor numérico del valor de ángulo objetivo mostrado deseado. Una señal podría proceder por ejemplo de una llave de clic y mostrar <Ángulo objetivo>. |
Texto | Una cadena alfanumérica del texto mostrado deseado. Por ejemplo: «Se ha cambiado el aceite». |
Las etapas siguientes no son compatibles:
Etiqueta de etapa | Nombre |
|---|---|
DI | Ejecutar hasta entrada digital: N/A |
DT | Apretar hasta DynaTork: N/A |
MWR | Llave mecatrónica: N/A |
WP | Producción de llave: N/A |
WQ | Calidad de llave: N/A |
C | Embrague: N/A |
CL | Afloje de embrague: N/A |
TM | Apriete manual hasta par: N/A |









































