Kroky utahování
Tento oddíl uvádí kroky utahování platné pro controllery PF6000 a PF6 StepSync.
Obecné parametry
Název
Je-li to nutné, každému kroku lze dát název.
Směr otáčení
Každý krok utahování lze spustit buď dopředu, tj. jako utahování, nebo zpět, tj. za účelem mírného uvolnění šroubu. Tento směr označují šipky. Mnoho kroků utahování má jasně daný směr dopředu, např. utažení na úhel nebo utažení na moment. Kroky jako povolení na úhel nebo povolení na moment mají směr automaticky nastavený jako Zpět.
Kategorie kroku
Pro každý krok existuje možnost zvolit kategorii kroku. Po zvolení kategorie kroku budou utažení NOK uvedeny v zobrazení výsledků událostí s přidruženým podrobným stavem společně s odpovídající vícekrokovou informací o chybě. Není-li výběr proveden, podrobný stav bude nastaven jako „nekategorizovaná vícekroková chyba“. Přidružený podrobný stav lze upravovat.
Okno úhlu
Spoj je považován za Tvrdý, pokud je šroub utažen na plný moment a otáčí se o 30 stupňů (nebo méně) po utažení do úrovně dolícování. Měkký spoj se po utažení do úrovně dolícování otáčí o 720 nebo více stupňů. Parametr tvrdosti definuje Okno úhlu pro výpočet gradientu. Čím tvrdší je spoj, tím menší je okno úhlu.
Rampa rychlosti / Zrychlení
Pro většinu kroků lze specifikovat, jak se má provést zrychlení na cílovou rychlost. Jsou možná tři různá nastavení: Tvrdý, Měkký a Ruční. Definované zrychlení bude použito, kdykoli krok začne. Nezáleží na tom, pokud je nástroj na začátku kroku již spuštěn v nějaké rychlosti. Přesto se ke zrychlení na cílovou rychlost kroku použije rampa. Dojde k tomu i v případě, že rychlost na začátku kroku je vyšší, nebo nižší než cílová rychlost.
Rampa rychlosti - Tvrdý a Měkký režim:
Zrychlení | Použitý typ rampy rychlosti |
|---|---|
Tvrdý | 2000 ot./min./s (rampa rychlosti mezi 1000 a 10000 ot./min./s přestavuje tvrdé zrychlení.) |
Měkký | 500 ot./min./s (rampa rychlosti mezi 200 a 1000 ot./min./s přestavuje měkké zrychlení.) |
Režim Rampa rychlosti - Ruční:
Parametr | Výchozí hodnota | Minimální limit | Maximální limit |
|---|---|---|---|
Rychlost | 60 ot./min. | Musí být > 0 | Musí být <= Max. rychlost nástroje |
Zrychlení | 500 ot./min. | Musí být > 0 | Musí být <= Max. zrychlení nástroje |
Použití rychlostních posunů
Můžete definovat spouštěče úhlu 1-5 nebo spouštěče utahovacího momentu během kroku, kde se posunuje rychlost.
V rámci jednoho kroku jsou všechny spouštěče rychlostních posunů založeny na stejné vlastnosti, tj. buď na momentu, nebo úhlu. Nedají se v rámci jednoho kroku míchat.
Pro přidání rychlostního posunu:
V oblasti kroku Konfigurace, který může mít rychlostní posuny, klikněte na Přidat rychlostní posun a zvolte rozsah úhlu nebo rozsah utahovacího momentu. Otevře se pole Úhel/Moment rychlostního posunu.
Zadejte hodnoty podle tabulek níže.
Parametr | Popis |
|---|---|
Spouštěč úhlu/momentu | Musí být > 0. |
Rychlost | Musí být > 0. |
Typ rampy rychlosti | Tvrdá nebo měkká |
Spouštěče momentu a spouštěče úhlu musí být méně než krokový cíl, podle typu kroku a typu spuštění.
Spouštěč momentu a spouštěč úhlu se také ověřují vůči max. utahovacímu momentu a max. rychlosti nástroje. Objeví se varování nebo indikátor chyby vždy, když nastavení rychlostního posunu přesáhne buď max. hodnoty nástroje nebo max. hodnoty kroku.
Je možné přitlačit nastavení ke controlleru, když má utahovací program varování, ale ne když má utahovací program indikátor chyby (poruchy).
Řízení chování při brzdění (zarážka Ergo / setrvačnost)
Chování při brzdění během vícekrokového programu utahování lze řídit na dvou možných místech programu: v kroku před otočením směru utahování a/nebo v závěrečném kroku programu utahování. Na jiných místech vícekrokového programu nebudou parametry brzdění k dispozici v obecných nastaveních kroku. Brzdění lze nastavit buď jako zarážka Ergo, nebo jako Setrvačnost. Setrvačnost zcela zabrzdí nástroj, zatímco zarážka Ergo umožní ergonomičtější zpomalování utahování.
Pro nastavení typu brzdění přejděte do nastavení pro daný krok a v rozevírací nabídce Konfigurace brzdy zvolte možnost zarážka Ergo, nebo Setrvačnost. Setrvačnost nemá žádné další parametry.
Parametry zarážky Ergo
Parametr | Popis |
|---|---|
Adaptivní brzda | Nastavte adaptivní brzdu na Zapnuto, nebo Vypnuto |
Doba náběhu | K dispozici pouze v případě, že adaptivní brzda je vypnutá. Čas zadávejte v ms. |
Seznam jednotlivých kroků
C – Spojka
Tento krok spustí nástroj s naprogramovanou rychlostí ve směru dopředu do doby, než dojde k uvolnění spojky. Když nástroj nahlásí uvolnění spojky, krok skončí se stavem OK.
Program utahování využívající krok Spojka nemůže mít přiřazeny žádné další kroky.
Tento krok je platný pouze pro nástroje BCV-RE a BCP-RE se spojkou.
Parametr | Popis |
|---|---|
Řízení rychlosti | Jedna rychlost nebo dvě rychlosti |
Závěrečná rychlost | Nastavuje závěrečnou rychlost programu [ot./min.] |
Rampa rychlosti | Přepínač, kde lze zvolit rampu rychlosti [Tvrdá, Měkká] |
Opakované utažení | Detekce opakovaného utažení nastavená na Zap., nebo Vyp. |
Úhel opak. utažení | Nastavuje úhel opak. utažení [°] |
CL – Povolení spojky
Tento krok spustí nástroj s naprogramovanou rychlostí ve směru zpět do doby, než dojde k uvolnění spouštěcího tlačítka nástroje..
Program povolování využívající krok Spojka nemůže mít přiřazeny žádné další kroky.
Tento krok je platný pouze pro nástroje BCV-RE a BCP-RE se spojkou.
Parametr | Popis |
|---|---|
Závěr | Nastavuje rychlost programu [ot./min.] |
W – Čekat
V tomto kroku nástroj čeká po specifikovanou dobu. Během čekání se nástroj neotáčí, ale lze nastavit podmínku držení.
Parametr | Popis |
|---|---|
Doba čekání | Počet sekund, kdy bude nástroj zastavený. |
Podmínka držení |
|
SR – Uvolnění hlavice
V tomto kroku je nástroj spuštěn rychlostí n ve zpětném směru až do dosažení cílového úhlu. Cílový úhel se měří od začátku kroku.
Použití tohoto kroku je povoleno pouze jako posledního kroku na cestě utahování ve vícekrokovém programu utahování. Po tomto kroku však lze přidat synchronizační bod.
Parametr | Popis |
|---|---|
Cílový úhel | Úhel cíle. Výchozí: 3 º, musí být > 0 |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Rychlost | Výchozí: 60 ot./min. |
DI – Běh do digitálního vstupu
V tomto kroku běží nástroj ve směru definovaném parametrem Směr, dokud vstup specifikovaný v položce Digitální vstup není na základě hodnoty Podmínka zastavení vysoký nebo nízký.
Tento krok není k dispozici pro nástroje STB.
Parametr | Popis |
|---|---|
Směr | Dopředu, nebo zpět |
Digitální vstup | Lze zvolit jeden z následujících digitálních vstupů controlleru:
|
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
Podmínka zastavení |
|
Rychlost (ot./min.) | Výchozí: 60 ot./min. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Je k dispozici, pokud typ rampy rychlosti je Ruční. Výchozí: 500 ot./min./s. |
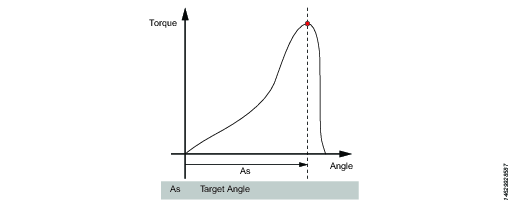
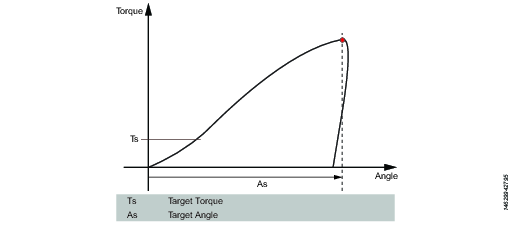
A – Utažení na úhel / Povolení na úhel
A – Utažení na úhel
V tomto kroku je nástroj spuštěn do dosažení cílového úhlu. Cílový úhel se měří od začátku kroku.
A – Povolení na úhel
V tomto kroku je nástroj spuštěn rychlostí n ve zpětném směru až do dosažení cíle úhlu. Cílový úhel se měří od začátku kroku.
Parametry
Parametr | Popis |
|---|---|
Cílový úhel | Úhel cíle. Musí být > 0. |
Rychlost | Výchozí: 60 ot./min. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
TrR – Povolení na uvolnění spouštěče
Tento krok platí pouze pro controller PF6000.
V tomto kroku je nástroj spuštěn ve zpětném chodu do uvolnění (povolení) spouštěče. Tento krok lze použít pouze jako poslední krok v rámci programu.
U nástrojů STB může být tento krok přidán pouze k programům povolování.
Parametr | Popis |
|---|---|
Rychlost | Číselná hodnota pro rychlost otáčení v ot./min. |
Typ rampy rychlosti | Seznam možností, kde lze zvolit rampu rychlosti [Tvrdá, Měkká, Ruční] |
TTTR – Utažení na uvolnění spouštěče
V tomto kroku je nástroj spuštěn do uvolnění spouštěče. Tento krok lze použít pouze jako poslední krok v rámci programu utahování.
Parametr | Popis |
|---|---|
Rychlost | Číselná hodnota pro rychlost otáčení v ot./min. |
Typ rampy rychlosti | Seznam možností, kde lze zvolit rampu rychlosti [Tvrdá, Měkká, Ruční] |
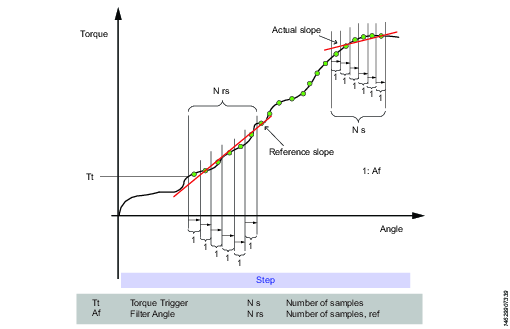
Utažení na průtažnost, způsob 2 (YM2)
Tento krok platí pouze pro controller PF6 Stepsync a neplatí pro controller PF6000 controller.
Tento krok spouští nástroj v zadané rychlosti ve směru dopředu, dokud nedojde k detekci bodu průtažnosti.
Hledání bodu průtažnosti začíná v době, kdy moment dosáhne Tt. Vypočítává se průměr momentu přes stupně Af. Tento postup se opakuje N rskrát.
Referenční sklon se vypočítává s lineární regresí přes N rs body/bodů. Poté se nové průměrné hodnoty vypočítávají průběžně přes A f stupně/stupňů.
Skutečný sklon se vypočítává s lineární regresí přes posledních N s průměrné body / průměrných bodů. Bodu průtažnosti je dosaženo, když je sklon menší než Py % referenčního sklonu.
Parametr | Popis |
|---|---|
Cílový moment | Musí být > 0. |
Úhel filtru | Výchozí: 1. Musí být > 0. |
Počet vzorků | Výchozí: 6. Musí být >= 4. |
Počet vzorků, reference | Výchozí: 6. Musí být >= 4. |
Procento bodu průtažnosti | Výchozí: 90 % Musí být > 20 %. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
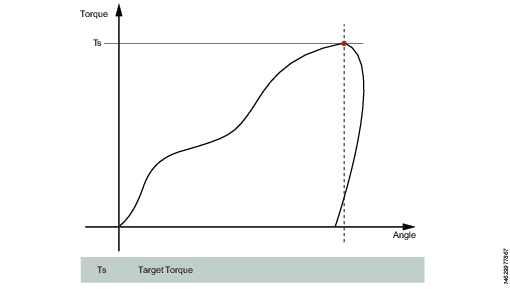
T – Utažení na moment / Povolení na moment
T – Utažení na moment
Tento krok spouští nástroj v naprogramované rychlosti ve směru dopředu, dokud nedojde k dosažení cílového momentu.
Parametr | Popis |
|---|---|
Cílový moment | Cíl momentu. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
T – Povolení na moment
V tomto kroku je nástroj spuštěn určitou rychlostí zpětném směru. Aby byl tento krok aktivní, moment musí nejdříve překročit 110 % cílového momentu. Cílový moment musí být nastaven na kladnou hodnotu. Po dosažení cílového momentu je tento krok spuštěn až do doby, kdy moment klesne pod hodnotu cílového momentu.
Parametr | Popis |
|---|---|
Cílový moment | Cíl momentu. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
T+A – Utažení na moment plus úhel
V tomto kroku je nástroj spuštěn do dosažení cílového momentu. Od tohoto bodu pokračuje k dosažení doplňkového cílového úhlu.
Parametr | Popis |
|---|---|
Cílový moment | Cíl momentu. Musí být > 0. |
Cílový úhel | Úhel cíle. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Rychlost | Výchozí: 60 ot./min. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
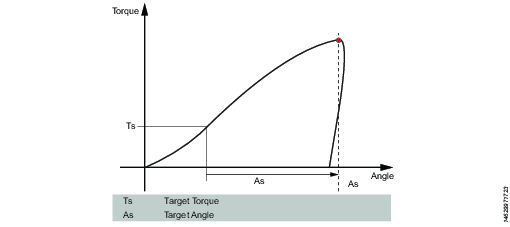
T|A – Utažení na moment nebo úhel
V tomto kroku je nástroj spuštěn rychlostí n ve směru dopředu až do dosažení buď cílového momentu, nebo cílového úhlu. Měření momentu a úhlu začíná na začátku kroku.
Parametr | Popis |
|---|---|
Cílový moment | Musí být > 0. |
Cílový úhel | Musí být > 0. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
T&A – Utažení na moment a úhel
Nástroj je spuštěn v daných otáčkách ve směru dopředu, dokud není dosaženo cílového momentu i úhlu. Cílový moment a cílový úhel musejí být nastaveny na > 0.
Parametr | Popis |
|---|---|
Cílový moment | Musí být > 0. |
Cílový úhel | Výchozí: 0. Musí být > 0. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
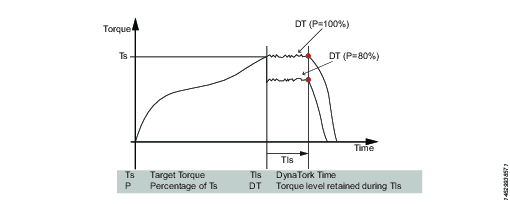
DT – Utažení na DynaTork
V tomto kroku je nástroj spuštěn rychlostí n ve směru dopředu až do dosažení cílového momentu. Nástroj poté udržuje aktuální konstantu v procentech DynaTork cílového momentu během času DynaTork.
Za účelem předejití přehřívání nástroje je důrazně doporučeno nikdy nespouštět DynaTork na více než 40 % maximálního momentu nástroje.
Parametr | Popis |
|---|---|
Cílový moment | Cíl momentu. Musí být > 0. |
Čas DynaTork | Čas DynaTork bude aktivní. |
Procento DynaTork | Procento cíle momentu. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Rychlost (ot./min.) | Výchozí: 60 ot./min. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
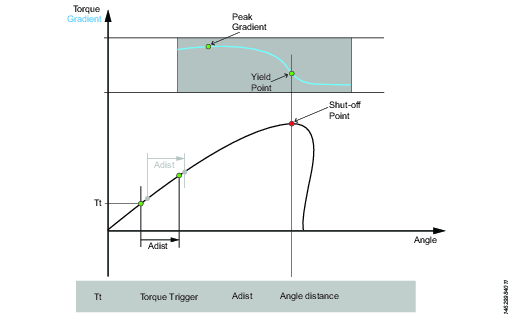
Y – Utažení na průtažnost
Tento krok není k dispozici pro nástroje STB.
Tato strategie spouští nástroj v rychlosti ve směru dopředu, než dojde k detekci bodu průtažnosti. Bod průtažnosti lze nalézt díky monitoringu gradientu momentu od bodu, kde se moment dostane nad úroveň spouštěcího momentu, a vypočítává se na základě měření vzdálenosti momentu a úhlu. Parametr vzdálenosti úhlu se nastavuje na základě zadané tvrdosti spoje.
Nastavte okno úhlu gradientu (pro tvrdý spoj, pro měkký spoj, nebo pro ruční nastavení okna úhlu). Je-li zvolena možnost Ruční, je nutno nastavit okno úhlu. Spoj je považován za Tvrdý, pokud je šroub utažen na plný moment a otáčí se o 30 stupňů nebo méně po utažení do úrovně dolícování. Měkký spoj se po utažení do úrovně dolícování otáčí o 720 nebo více stupňů. Parametr tvrdosti definuje Okno úhlu pro výpočet gradientu. Čím tvrdší je spoj, tím menší je okno úhlu.
Parametr | Popis |
|---|---|
Okno úhlu gradientu | Udává okno úhlu:
|
Okno úhlu | Je k dispozici, pokud je okno úhlu gradientu nastaveno na Ruční. Musí být >= 0 a <= 100. |
Spouštěcí moment | Měření úhlu začíná na tomto spouštěči. Musí být >= 0 a < max. moment nástroje. |
Tlumení | Frekvence, při které se vypočítává gradient. Musí být > 0 a < 100 a < Okno úhlu. |
Procento bodu průtažnosti | Musí být >= 20 % |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Typ filtru momentu | Typ filtru:
|
Frekvence při zastavení | Musí se zadat, když je Typ filtru momentu nastaven na Nízký průchod:
|
Počet vzorků | Musí se zadat, když je Typ filtru momentu nastaven na Klouzavý průměr:
|
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
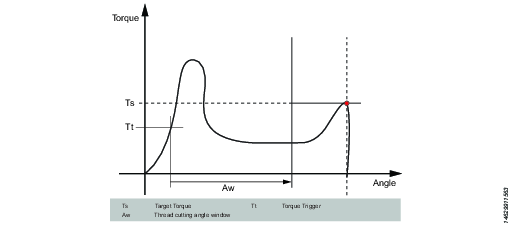
ThCT– Řezání závitu na moment
Funkce Řezání závitu na moment umožňuje utahování, při němž je vyžadovaný moment doběhu větší než moment dokončení doběhu, například při utahování tenkých kovových plechů při použití závitořezných (nebo samořezných) šroubů. Nástroj je spuštěn směrem dopředu, dokud není dosaženo úhlu řezání závitu (Aw). Okno úhlu řezání závitu se měří od okamžiku, kdy moment poprvé překročí spouštěcí moment řezání závitu (Ttc). Od bodu dosažení úhlu řezání závitu krok pokračuje do dosažení cílového momentu (Tt) rekreace.
Parametr | Popis |
|---|---|
Cílový moment | Musí být > 0. |
Okno úhlu řezání závitu | Výchozí: 0. Musí být > 0. |
Spouštěcí moment | Měření úhlu začíná na tomto spouštěči. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
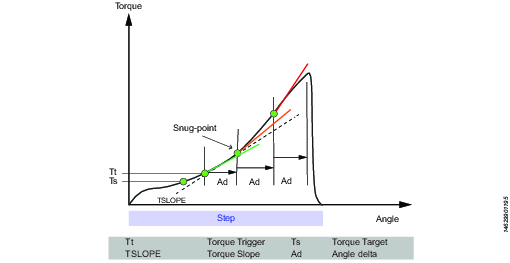
RD – Doběh
Tento krok není k dispozici pro nástroje STB.
Krok doběhu je část utahování od okamžiku, kdy šroub najede do závitu, až do okamžiku, kdy se hlava šroubu dotkne povrchu spoje a dosáhne se bodu dolícování. Utahovací moment vyžadovaný během doběhu nevytváří žádnou svěrnou sílu.
V tomto kroku je nástroj spuštěn ve zvolených otáčkách ve směru dopředu a v závislosti na typu doběhu, momentu, nebo dolícování je chování v rámci kroku následující:
Typ doběhu: Do momentu: Krok se zastaví při nalezení zadaného cílového momentu.
Typ doběhu: Do dolícování: Výpočet gradientu dolícování začíná na zadané úrovni spuštění momentu Tt. Pokud není zvolen žádný spouštěč momentu, výpočet gradientu začíná na začátku kroku.
Výpočet sklonu se provádí mezi dvěma body stupňů úhlu Ad a vypočítává se jako: (Tn – Tn-1) / (An – An-1). Jakmile jsou dva po sobě následující sklony větší než TSLOPE, je nalezen bod dolícování.
Parametr | Popis |
|---|---|
Typ doběhu | Do momentu nebo Do dolícování. |
Cílový moment | Výchozí: „Nenastaveno“. Musí být > 0. |
Rychlost | Výchozí: 60 ot./min. Musí být > 0. |
Typ rampy rychlosti | Tvrdá, měkká, nebo ruční. Výchozí: Tvrdá. V případě volby Ruční se otevře pole rampy rychlosti. |
Rampa rychlosti | Pokud je typ rampy rychlosti Ruční, otevře se toto pole. Výchozí: 500 ot./min./s. |
Spouštěcí moment | Je-li typ doběhu Do dolícování, zobrazuje se Spouštěcí moment. Výchozí: „Nenastaveno“. Musí být > 0. |
Úhel delta | Je-li typ doběhu Do dolícování, zobrazuje se Úhel delta. Výchozí: „0“. Musí být > 0. |
Stupeň momentu | Je-li typ doběhu Do dolícování, zobrazuje se Stupeň momentu. Výchozí: „0“. Musí být > 0. |
Brzda (Platí pouze pro controllery PF6 Flex a PF6 Stepsync). | V případě volby On (Zap.) se nástroj zastaví po dosažení cíle. V případě volby Off (Vyp.) přejde program přímo k dalšímu kroku bez zastavování nástroje. |
Zapojení (E)
Tento krok není k dispozici pro nástroje STB.
V tomto kroku je nástroj spuštěn v obou směrech do doby, kdy hlavice dosáhne zavedení šroubu. Tento krok pokračuje do dosažení cílového momentu nebo cílového úhlu za předpokladu, že hodnota Pokračovat do zavedení je nastavena na Ano. Je-li v libovolném směru dosaženo cílového úhlu v libovolném směru, dojde k otočení směru. Omezte počet pokusů o zavedení zadáním maximálního počtu pokusů o zavedení. Je-li v libovolném směru dosaženo cílového momentu, krok skončí se stavem OK.
Ext – Externí výsledek
Externí výsledek je strategie používaná, když externí digitální signál indikuje utahování v pořádku (a je to potvrzeno hodnotami momentu nebo úhlu měřenými během utahování). Externí signál lze poskytnout různými prostředky, které mohou poskytnout digitální signál zařízení Power Focus 6000 (prostřednictvím sběrnice I/O).
Po odeslání signálu se v zobrazení výsledků (zaprotokolovaná data) objeví hodnota parametru Cíl uvedená v programu utahování (zadaná hodnota momentu, hodnota úhlu nebo textový řetězec). Tyto hodnoty (moment a úhel) nepřestavují skutečně naměřené hodnoty, ale pouze vložený text.
Parametr | Popis |
|---|---|
Moment <Target torque> | Číselná hodnota pro požadovanou zobrazenou hodnotu cílového momentu. Signál může přijít například z utahováku Click a zobrazí se <Target torque>. |
Úhel <Target angle> | Číselná hodnota pro požadovanou zobrazenou hodnotu cílového úhlu. Signál může přijít například z utahováku Click a zobrazí se <Target angle>. |
Text | Alfanumerický řetězec pro požadovaný zobrazený text. Příklad: „Byl vyměněn olej“ |
MWR – Mechatronický klíč
Mechatronický klíč představuje specializovaný krok, který lze používat pouze ve spojení s mechatronickým klíčem (MWR).
Tento krok nelze používat ve spojení s dalšími kroky. Během tohoto kroku nelze používat žádná omezení. Ve výchozím nastavení má tento krok tři monitory: Špičkový moment, Úhel a Kliknutí.
Parametr | Popis |
|---|---|
Limit povolování | Číselná hodnota pro záporný moment (tj. Moment ve směru povolování), v jejímž bodě se výsledky utahování označí jako NOK (nesprávný směr utahování (povolování)); v Nm. |
Velikost nástroje | Číselná hodnota pro specifickou délku koncového připojovacího nástroje nainstalovaného na MWR-TA; v mm. |
Ohnutí nástroje | Číselná hodnota pro koncový připojovací nástroj nainstalovaný na MWR-TA; ve °/Nm. |
Okno úhlu opakovaného utažení | Číselná hodnota pro úhel pro určení, zda šroub je již utažen, pokud bylo dosaženo momentu, ve °. |
Max. úhlová rychlost | Číselná hodnota pro maximální úhlovou rychlost, kterou může být šroub utažen, ve °/s. |
WP – Utahovák – výroba
Strategie používaná při testování kvality utahování provedeného utahovákem ST.
Parametr | Popis |
|---|---|
Strategie řízení | Typ kroku Utahovák – výroba lze nakonfigurovat s následujícími strategiemi řízení.
|
Na základě zvolené strategie řízení se zobrazí kombinace některých níže uvedených parametrů.
Parametry | Popis |
|---|---|
Cílový moment | Definuje cílový moment pro krok utahování. |
Měřit moment při | Určuje, kdy dojde k měření momentu. Můžete volit mezi možnostmi Špičkový moment a Špičkový úhel.
|
Limit vyhledání úhlu | Jde o kompenzaci, která se používá při nastavování hodnoty výsledku momentu pro utahování. Aby tento parametr byl k dispozici, hodnotu Měřit moment při je nutno nastavit na Špičkový úhel. |
Doba řehtačkového efektu | Číselná hodnota pro dobu řehtačkového efektu, která je ve výchozím nastavení 5 000 ms. Umožňuje obsluze uvolnit na určitou dobu moment a provést během utahování dobíjení. Pokud dojde k překročení doby řehtačkového efektu, výsledek utahování je označen jako NOK se zdůvodněním „Vypršení platnosti utahování“. |
Doba koncového cyklu | Číselná hodnota v ms určující dobu koncového cyklu. Používá se, když moment poklesne pod hodnotu Doběh dokončen. |
Koeficient korekce momentu | Tento parametr se používá při korekci čtení momentu, když se na utahováku používá nástavec nebo násobič momentu. Výchozí hodnota je 1. |
Korekce úhlu | Tento parametr se používá při korekci čtení úhlu, když se na utahováku používá nástavec nebo násobič momentu. Výchozí hodnota je 0. |
Cílový úhel | Definuje cílový úhel pro krok utahování. |
Detekce opakovaného utažení | On (Zap.) nebo Off (Vyp.). Detekci opakovaného utažení k určení, kdy utahování představuje na základě nastavení limitu úhlu opakované utažení. Limit úhlu pro opakované utažení je aktivováno, když je směr opakovaného utažení nastaven na Zapnuto. |
Koeficient lineárního sklonu | Koeficient lineárního sklonu charakterizuje tuhost spoje v lineární části křivky jako sklon momentu/úhlu v jednotkách Nm/stupňů. |
Kompenzovat hodnotu | Můžete volit mezi možnostmi Průměrný moment a Špičkový moment. Funkce Kompenzovat hodnotu určuje, jak se bude vypočítávat PVT. Průměrný moment – PVT bude vycházet z průměru vypočítaného na základě následujících údajů:
Špičkový moment: - PVT bude vycházet z hodnoty nejvyššího bodu momentu naměřené před detekcí dolícování. |
Monitorování zpoždění | Výpočet PVT nezačne před průchodem tímto oknem a začíná v bodě začátku utahování. |
Interval PVT | Nastavuje, pro kolik stupňů se okno PVT bude vypočítávat a začíná v bodě vzdálenosti PVT. |
Vzdálenost PVT | Nastavuje, kolik stupňů před dolícováním spustí systém okno PVT. |
Min. deformační moment | Minimální limit deformačního momentu. |
Max. deformační moment | Maximální limit deformačního momentu. |
WQ – Utahovák – kvalita
Strategie používaná při testování kvality utahování utahovákem ST.
Parametr | Popis |
|---|---|
Strategie řízení | Typ kroku Utahovák – kvalita lze nakonfigurovat s následujícími strategiemi řízení.
|
Na základě zvolené strategie řízení se zobrazí kombinace některých níže uvedených parametrů.
Parametry | Popis |
|---|---|
Doba řehtačkového efektu | Číselná hodnota pro dobu řehtačkového efektu, která je ve výchozím nastavení 5 000 ms. Umožňuje obsluze uvolnit na určitou dobu moment a provést během utahování dobíjení. Pokud dojde k překročení doby řehtačkového efektu, výsledek utahování je označen jako NOK se zdůvodněním „Vypršení platnosti utahování“. |
Koeficient korekce momentu | Tento parametr se používá při korekci čtení momentu, když se na utahováku používá nástavec nebo násobič momentu. Výchozí hodnota je 1. |
Korekce úhlu | Tento parametr se používá při korekci čtení úhlu, když se na utahováku používá nástavec nebo násobič momentu. Výchozí hodnota je 0. |
Cílový úhel | Definuje cílový úhel pro krok utahování. |
Detekce opakovaného utažení | On (Zap.) nebo Off (Vyp.). Detekci opakovaného utažení k určení, kdy utahování představuje na základě nastavení limitu úhlu opakované utažení. Limit úhlu pro opakované utažení je aktivováno, když je směr opakovaného utažení nastaven na Zapnuto. |
Koeficient lineárního sklonu | Koeficient lineárního sklonu charakterizuje tuhost spoje v lineární části křivky jako sklon momentu/úhlu v jednotkách Nm/stupňů. |
TP – Tensor Pulse
Před použitím kroku utahování Tensor Pulse je povinné, aby v controlleru byl nainstalován následující typ licence:
Strategie s malou reakční sílou
Tensor Pulse platí pouze pro následující nástroje: ETV-STR61-100-13, ETV-STR61-70-13, ETV-STR61-50-10.
Tento krok generuje utahovací pulzy ve směru dopředu, dokud nedojde k dosažení cíle momentu.
Parametr | Popis |
|---|---|
Cíl momentu – Ts | Cíl momentu musí být v rozsahu od 0 do maximálního momentu nástroje. |
Pulzní energie – Pe | Pulzní energie se používá k řízení množství energie/napětí v každém pulzu. Pulzní energie musí být v rozsahu 0 až 100 %. |
Faktor ladění reakční síly | Faktor ladění reakční síly se používá k ladění reakční síly v rámci kroku Tensor Pulse. Faktor ladění reakční síly musí být v rozsahu 0 až 100 %. |









































