Vue d'ensemble du bus de terrain
Un système habituel de contrôle de gestion d'usine utilisant la communication de bus de terrain peut ressembler à la figure ci-dessous lorsqu'il communique avec un coffret.
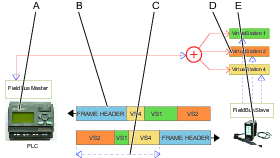
A | Maître de bus de terrain (API) | B | En-tête de trame |
C | Données utilisateur depuis et vers plusieurs postes de travail virtuels dans la Trame de données de processus | D | Poste de travail virtuel |
E | Coffret avec plusieurs postes de travail virtuels |
Un maître de bus de terrain, normalement un API, échange des informations avec un certain nombre de nœuds distants appelés des bus de terrain subordonnés. Le maître communique avec un subordonné à la fois. Le maître transmet une trame au subordonné et reçoit une autre trame en réponse.
L'API transmet des données à un module Anybus qui communique ensuite avec le coffret pouvant contenir des données d'identification, des informations de sélection de tâche et d'autres signaux.
Un coffret envoie des réponses à l'API via le module Anybus pouvant contenir des signaux d'événements, des signaux de statut, des résultats de serrage ainsi que d'autres signaux.
Les fréquences de mise à jour des données de traitement peuvent différer. La fréquence de mise à jour entre le coffret et le module Anybus est d'environ 100 Hz et la fréquence de mise à jour entre le module Anybus et l'API est d'environ 500 Hz.
La liaison physique de transmission dépend du type de bus de terrain sélectionné. Une transmission se compose d'un En-tête de trame, contenant des informations d'adresse, et d'une Trame de données de processus, contenant toutes les données.
Si le coffret prend en charge les postes virtuels, il est essentiel de diriger les bonnes informations vers chaque poste virtuel. La Trame de données de processus peut contenir une ou plusieurs Mappes de bus de terrain, une pour chaque poste de travail virtuel.









































