四步拧紧参数 — 开始阶段
在开始步骤监控时间、扭矩和角度。本步骤有一个角度为目标。
本文采用图形表示,以描述配置设定及参数值的解释。任何图形用户界面并未使用图形。
该步骤定义为从触发器按下直到达到指定的目标角度。
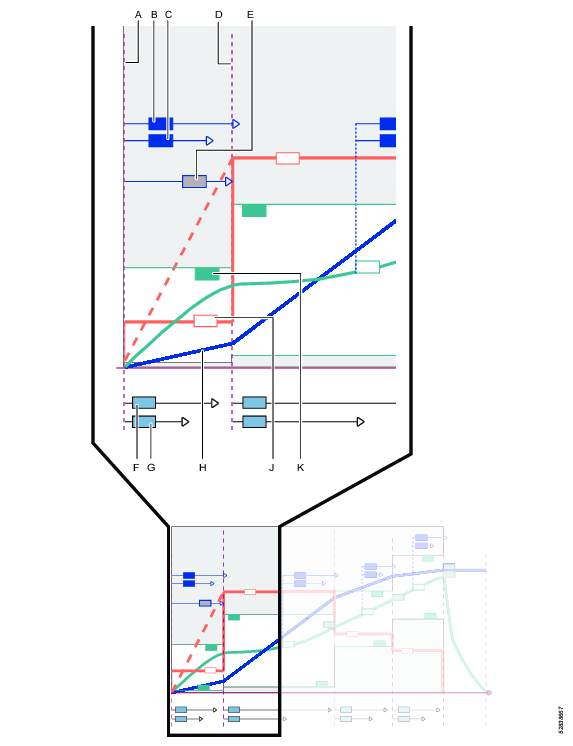
A | 按下触发器 |
B | 最大角度(监测) |
C | 最小角度(监测) |
D | 开始步骤结束 |
E | 开始步骤目标角度 |
F | 最短时间(监测) |
G | 最长时间(监测) |
H | 角度曲线 |
J | 速度曲线 |
K | 扭矩最大值(监测) |
本表列出各种可用的参数。仅提供部分参数,如果启用某项功能,则可以查看。
参数 | 说明 | 默认值 |
|---|---|---|
方向 | 拧紧的旋转方向。 CW:顺时针 CCW:逆时针 | 顺时针 |
电流监测 | 关闭:电流监测被禁用,并且工具扭矩由扭矩传感器测量。 On:(开启:)在最终扭矩目标下测量电流并转换为扭矩值。计算的扭矩与测量扭矩对比。如果差异在 10% 以内,那么拧紧被视为 OK | |
真实角度补偿 | 处于开或关位置的开关。 | 关闭 |
负 | 只有在真角度补偿 = On时才可见。 定义工具的最大逆时针旋转。如果数值超出限度,那么拧紧被终止并且报告错误。以角度数值表示。 | 30 |
正 | 只有在真角度补偿 = On时才可见。 定义工具的最大顺时针旋转。如果数值超出限度,那么拧紧被终止并且报告错误。以角度数值表示。 | 30 |
附件调校已启用 | 是 否 | 否 |
参数 | 说明 | 默认值 |
|---|---|---|
软启动 | 开启:soft start(软启动)实现较慢速度的平稳启动。它可用于接合螺纹。 关闭:工具转速会尽快上升至旋入速度。 | 开启 |
速度 | 定义软启动期间的速度。 | 34 |
角度 | 步骤目标角度。 当目标实现时,步骤结束被定义在此点。 | 90 |
最小角度 | 监控角度值并检查结果是否在限值内。 | 70 |
最大角度 | 监控角度值并检查结果是否在限值内。 | 110 |
最小扭矩 | 定义软启动期间的扭矩下限。如果最小扭矩低于限值,拧紧中止并发出一条错误消息。拧紧操作将被视为不正确。 | 0.00 |
扭矩最大值 | 定义软启动期间施加的最大扭矩。如果超过了最大扭矩,拧紧中止并发出一条错误消息。拧紧操作将被视为不正确。 | 1.25 |
最短时间 | 步骤最短时间。从按下触发器开始测量。以数字毫秒值表示。 | 100.00 |
最长时间 | 步骤最长时间。从按下触发器开始测量。以数字毫秒值表示。 | 500.00 |
使用附件调校 | 是 否 | 否 |
齿轮比 | 仅当使用附件调校设为是时可见。 最小/最大值:0.5/4.0 需要使用齿轮比来补偿角度和扭矩。齿轮比会影响工具的最大速度和最大扭矩。 在参数使用附件调校是/否之间切换时,“齿轮比”的值不会重置为默认值。 | 1.00 |
效率优化 | 仅当使用附件调校设为是时可见。 最小/最大值:0.5/1.0 设置附件的效率损失。需要使用附件传动比及效率优化来补偿扭矩。 在参数使用附件调校是/否之间切换时,“效率调校”的值不会重置为默认值。 | 1.00 |









































