3단계
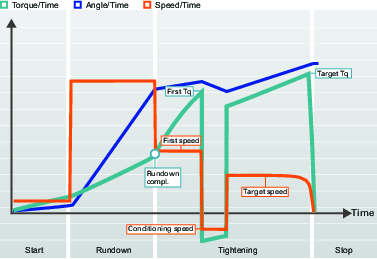
3단계 전략은 매립으로 인한 단기 완화를 극복하고 예하중 산란을 줄이기 위해 최초 단계와 최종 단계 사이에 풀기 단계를 추가합니다. 때로는 조인트를 조절하기 위해 사용되기도 합니다. 예를 들어, 이것은 인접한 표면이 많은 조인트에서 유용하며 재사용된 부품보다 새로운 부품에 더 큰 영향을 미치게 되는데, 표면이 매끄럽게 되어 매립이 줄어들기 때문입니다.
최초 단계를 주어진 토크인 최초 토크로 조이고 나서 너트를 지정된 조절 각도로 돌려 하중을 푼 다음 너트를 해당 목표 토크로 다시 조여 조인트를 조절합니다.
아래의 표는 3단계 조임 전략에 대한 모든 매개변수를 나열합니다. 일부 매개변수는 필수이고, 일부는 선택적이며 일부는 조건부입니다.
상태가 확인되지 않을 경우 조건부 매개변수는 구성 메뉴에 표시되지 않고, 이는 특정 기능이 비활성화되었을 때와 동일합니다.
아래의 표는 최종 목표 = 토크에 유효합니다.
최초 목표가 공구에 도달하고 조절 단계를 입력하면, 공구가 즉시 정지하고 최종 단계를 계속하기 전 역방향으로 움직입니다. 이 조절 단계는 수동 공구의 인체공학성을 개선하기 위해 미세 조정되어야 할 수 있습니다.
최종 목표로서의 토크 값에 대한 매개변수
매개변수 이름 | 조건 | 설명 | 기본값 |
|---|---|---|---|
목표 |
| 토크 또는 각도는 바로 가기 메뉴에서 선택할 수 있습니다 |
|
최초 토크 | 목표 = 토크 |
|
|
최초 속도 |
| 라디오 단추로 선택됩니다. 최초 속도는 자동으로 또는 수동으로 선택할 수 있음 |
|
최초 속도 | 최초 속도 = 수동 | 최초 단계 도중 공구 속도를 지정함 |
|
조절 각도 | 전략 = 3단계 | 조절 단계 도중에 역방향으로 소켓을 돌릴 각도 | 180° |
조절 속도 | 전략 = 3단계 | 컨디셔닝 단계 동안 역 회전 목표 속도 | 345 rpm |
목표 속도 |
| 라디오 단추로 선택됩니다. 목표 속도는 자동으로 또는 수동으로 선택할 수 있음 |
|
목표 속도 | 대상 속도 = 수동 | 최종 단계 도중 공구 속도를 지정함 |
|
목표 토크 |
| 조임의 최종 단계의 목표 토크를 정의함 |
|
토크 한계 |
| 라디오 단추로 선택됩니다. 최대 및 최소 토크 값을 자동 또는 수동으로 선택할 수 있음 |
|
토크 최소 | 토크 한계 = 수동 | 하한에 대한 토크 값 | 목표 토크의 95% |
토크 최대 | 토크 한계 = 수동 | 상한에 대한 토크 값 | 목표 토크의 120% |
각도 한계 |
| 각도 한계는 바로 가기 메뉴를 통해 활성화됩니다. 꺼짐: 모니터링되는 각도 한계가 없습니다. 런다운 완료부터: 모니터링 창은 런다운 토크 완료에 도달했을 때 설정됩니다. 최초 토크부터: 모니터링 창은 최초 토크 값에 도달했을 때 설정됩니다. 토크부터: 모니터링 창은 특정 토크 값에 도달했을 때 설정됩니다. |
|
최종 각도 모니터링 토크 | 각도 한계 = 토크부터 | 각도 한계가 모니터링을 시작하는 토크 값 |
|
최소 각도 | 각도 한계 = 켜짐 | 각도 값 하한 | 324° |
최대 각도 | 각도 한계 = 켜짐 | 각도 값 상한 | 396° |
최소 시간 | 각도 한계 = 켜짐 | 단계에 대한 최소 시간 범위 0 - 99999 ms | 0 ms |
최대 시간 | 각도 한계 = 켜짐 | 단계에 대한 최대 시간 범위 1 - 99999 ms | 1000 ms |
토크 측정 |
| 바로 가기 메뉴에서 선택: 최대 토크 값: 조임 중 최고 토크 값을 측정합니다. 최고 각에서의 값: 최고 각도 값에서 토크 값을 측정합니다. 차단: 정지 단계를 시작하기 전에 토크 값을 측정합니다. |
|
토크 보상 |
| 바로 가기 메뉴에서 선택: 켜짐: 토크 보상점에서 런다운 동안 측정된 토크로 최종 토크 값을 보상합니다. 꺼짐: 토크 보상 값은 적용되지 않습니다. | 꺼짐 |
토크 보상점 | 토크 보상 = 켜짐 | 토크 보상점에서 런다운 완료 시 지정된 각도로 다시 참조하는 것으로 설정됩니다.
| 45° |
각도 측정 | 각도 한계 = 켜짐 또는 최종 목표 = 각도 | 바로 가기 메뉴에서 선택: 최대 토크 시 값: 조임 시 최대 토크의 각도 값을 측정합니다. 최대 각도 값: 조임 도중 최대 각도 값을 측정합니다. 차단: 정지 단계를 시작하기 전에 각도 값을 측정합니다.
| |
조기 토크 손실 탐지 시간 | 200 ms | ||
전류 모니터링 | 바로 가기 메뉴에서 선택: 켜짐: 현재 모니터링이 활성화됩니다. 꺼짐: 현재 모니터링을 사용할 수 없습니다. 토크 수치가 정확하다는 합리적인 신뢰도를 제공하기 위해 측정된 토크에 대한 중복 검사로 현재 모니터를 사용합니다. | ||
차단 전류 상한. | 전류 모니터 = 켜짐 | 전류 값은 0 초과 및 공구 최대 전류 미만이어야 합니다. | |
차단 전류 하한. | 전류 모니터 = 켜짐 | 전류 값은 0 초과 및 전류 상한 미만이어야 합니다. |
아래의 표는 3단계 조임 전략에 대한 모든 매개변수를 나열합니다. 일부 매개변수는 필수이고, 일부는 선택적이며 일부는 조건부입니다.
상태가 확인되지 않을 경우 조건부 매개변수는 구성 메뉴에 표시되지 않고, 이는 특정 기능이 비활성화되었을 때와 동일합니다.
최종 목표로서의 토크 값에 대한 매개변수
매개변수 이름 | 조건 | 설명 | 기본값 |
|---|---|---|---|
목표 |
| 토크 또는 각도는 바로 가기 메뉴에서 선택할 수 있습니다 |
|
최초 토크 | 목표 = 각도 |
|
|
최초 속도 |
| 라디오 단추로 선택됩니다. 최초 속도는 자동으로 또는 수동으로 선택할 수 있음 |
|
최초 속도 | 최초 속도 = 수동 | 최초 단계 도중 공구 속도를 지정함 |
|
조절 각도 | 전략 = 3단계 | 조절 단계 도중에 역방향으로 소켓을 돌릴 각도 | 180° |
조절 속도 | 전략 = 3단계 | 컨디셔닝 단계 동안 역 회전 목표 속도 | 345 rpm |
목표 속도 |
| 라디오 단추로 선택됩니다. 목표 속도는 자동으로 또는 수동으로 선택할 수 있음 |
|
목표 속도 | 대상 속도 = 수동 | 최종 단계 도중 공구 속도를 지정함 |
|
토크 최소 | 하한에 대한 토크 값 | 목표 토크의 95% | |
토크 최대 | 상한에 대한 토크 값 | 목표 토크의 120% | |
목표 각도 |
| 최종 단계에 대한 목표 값 |
|
각도 한계 |
| 각도 한계는 바로 가기 메뉴를 통해 활성화됩니다. 자동: 알고리즘기이 자동으로 설정합니다. 수동: 한계는 수동으로 설정합니다. |
|
최소 각도 | 각도 제한 = 수동 | 각도 값 하한 | 324° |
최대 각도 | 각도 제한 = 수동 | 각도 값 상한 | 396° |
최소 시간 | 각도 제한 = 수동 | 단계에 대한 최소 시간 범위 0 - 99999 ms | 0 ms |
최대 시간 | 각도 제한 = 수동 | 단계에 대한 최대 시간 범위 1 - 99999 ms | 1000 ms |
토크 측정 |
| 바로 가기 메뉴에서 선택: 최대 토크 값: 조임 중 최고 토크 값을 측정합니다. 최고 각에서의 값: 최고 각도 값에서 토크 값을 측정합니다. 차단: 정지 단계를 시작하기 전에 토크 값을 측정합니다. |
|
토크 보상 |
| 바로 가기 메뉴에서 선택: 켜짐: 토크 보상점에서 런다운 동안 측정된 토크로 최종 토크 값을 보상합니다. 꺼짐: 토크 보상 값은 적용되지 않습니다. | 꺼짐 |
토크 보상점 | 토크 보상 = 켜짐 | 토크 보상점에서 런다운 완료 시 지정된 각도로 다시 참조하는 것으로 설정됩니다.
| 45° |
조기 토크 손실 탐지 시간 | 200 ms | ||
전류 모니터링 | 바로 가기 메뉴에서 선택: 켜짐: 현재 모니터링이 활성화됩니다. 꺼짐: 현재 모니터링을 사용할 수 없습니다. 토크 수치가 정확하다는 합리적인 신뢰도를 제공하기 위해 측정된 토크에 대한 중복 검사로 현재 모니터를 사용합니다. | ||
차단 전류 상한. | 전류 모니터 = 켜짐 | 전류 값은 0 초과 및 공구 최대 전류 미만이어야 합니다. | |
차단 전류 하한. | 전류 모니터 = 켜짐 | 전류 값은 0 초과 및 전류 상한 미만이어야 합니다. |









































