クイックステップ
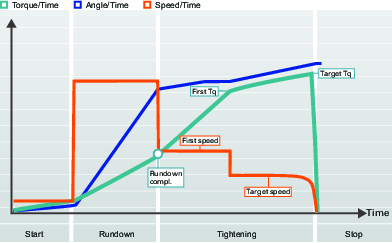
クイックステップは、所定のトルクと速度で最初のステップを追加し、次に最終ステップのターゲット速度を低下させることでジョイントのプレロード散乱を低減させるために使用する締め付け戦略です。
次の表に、クイックステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終ターゲットとしてのトルク値のパラメータ
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます。 |
|
最初のトルク | ターゲット = トルク |
|
|
最初の速度 |
| 最初の速度は、自動的にまたは手動で選択できます。 |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ターゲット速度は、自動的にまたは手動で選択できます。 |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
目標トルク |
| 締め付けまたは最終ステップの目標トルクを定義します。 |
|
トルク限度 |
| 最大と最小のトルク値は、自動または手動で選択できます。 |
|
最小トルク | トルク制限 = 手動 | 下限のトルク値。 | ターゲットトルクの 95% |
最大トルク | トルク制限 = 手動 | 上限のトルク値。 | ターゲットトルクの 120% |
角度限界 |
| 角度限界はショートカットメニューから選択します。 オフ: 角度制限監視なし。 完了ランダウンから:監視ウィンドウは、ランダウン完了トルク値に達した時点から設定します。 最初のトルクから: 監視ウィンドウは、最初のトルク値に達した時点から設定します。 トルクから:監視ウィンドウは、特定のトルク値に達した時から設定します。 |
|
最後の角度監視トルク | 角度限界 = トルクから | 角度限界が監視される時点からのトルク値。 |
|
最小角度 | 角度限界 = オン | 角度値下限。 | 324° |
最大角度 | 角度限界 = オン | 角度値上限。 | 396° |
最短時間 | 角度限界 = オン | 段階の最短時間。 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = オン | 段階の最長時間。 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。
| 45° |
角度を測定対象 | 角度限界 = オン | ピークトルク時の値: 締め付け時に最大トルクで角度値を測定します。 最大角度値: 締め付け時の最大角度値を測定します。 シャットオフ: 停止段階を開始する前に角度値を測定します。
| |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限。 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |
次の表に、クイックステップ締め付け戦略のすべてのパラメータを示します。一部のパラメータは必須であり、一部はオプション、一部は条件付きです。
条件が有効でなければ、条件付きパラメータは、設定メニューに表示されません。特定の機能が無効になっている場合も同様です。
最終目標としての角度値のパラメータ
パラメーター名 | 状態 | 説明 | デフォルト値 |
|---|---|---|---|
ターゲット |
| トルクまたは角度はショートカットメニューから選択できます。 |
|
最初のトルク | 目標 = 角度 |
|
|
最初の速度 |
| 最初の速度は、自動的にまたは手動で選択できます。 |
|
最初の速度 | 最初の速度 = 手動 | 最初のステップ時のツール速度を指定します。 |
|
ターゲット速度 |
| ターゲット速度は、自動的にまたは手動で選択できます。 |
|
ターゲット速度 | ターゲット速度 = 手動 | 最終ステップ時のツール速度を指定します。 |
|
最小トルク | 下限のトルク値。 | ターゲットトルクの 95% | |
最大トルク | 上限のトルク値。 | ターゲットトルクの 120% | |
ターゲット角度 |
| 最終ステップのターゲット値。 |
|
角度限界 |
| 自動:アルゴリズムによって自動的に設定されます。 手動:限度を手動で設定します。 |
|
最小角度 | 角度限界 = 手動 | 角度値下限 | 324° |
最大角度 | 角度限界 = 手動 | 角度値上限 | 396° |
最短時間 | 角度限界 = 手動 | 段階の最短時間 0~9999 ミリ秒の範囲 | 0 ms |
最長時間 | 角度限界 = 手動 | 段階の最長時間 1~9999 ミリ秒の範囲 | 1000 ms |
トルク測定点 |
| 最大トルク値: 締め付け時の最大トルク値を測定します。 ピーク角度時の値: 最大角度値でのトルク値を測定します。 シャットオフ: 停止段階を開始する前にトルク値を測定します。 |
|
トルク補正 |
| オン: トルク補正点でランダウン中に測定されたトルクで最終締め付け値を補正します。 オフ: トルク補正値が適用されません。 | オフ |
トルク補正点 | トルク補正 = オン | トルク補正点は、ランダウン完了からの指定角度を参照して設定されます。 | 45° |
早期のトルク喪失検出時間 | 200 ms | ||
電流監視 | オン: 電流監視が有効になります。 オフ: 電流監視が無効になります。 電流監視は、トルクの測定値が十分に正確であることを確認するための、測定されたトルクの冗長検査として使用できます。 | ||
シャットオフ電流上限 | 電流監視 = オン | 電流値は 0 より大きく、ツールの最大電流より小さくなければなりません。 | |
シャットオフ電流下限 | 電流監視 = オン | 電流値は 0 より大きく、電流の上限より小さくなければなりません。 |









































