4 段階締め付け用パラメータ - 最終締め付け段階
締め付けステップは、最初のステップと最後のステップという 2つのステップに分けられます。最初の締め付けステップは、ランダウン完了から最初のトルク目標レベルに達するまでです。最初の締め付け中、時間、トルクおよび角度が監視されます。最終締め付けステップは、最初のトルクから最終目標レベルに達するまでです。最終締め付け中、時間、トルクおよび角度が監視されます。ステップの目標値は、目標トルクまたは目標角度のいずれかのレベルに達した時点です。
グラフィック表示は、構成設定とパラメーター値の解釈を説明する文書で使用します。グラフは、GUI では使用されません。
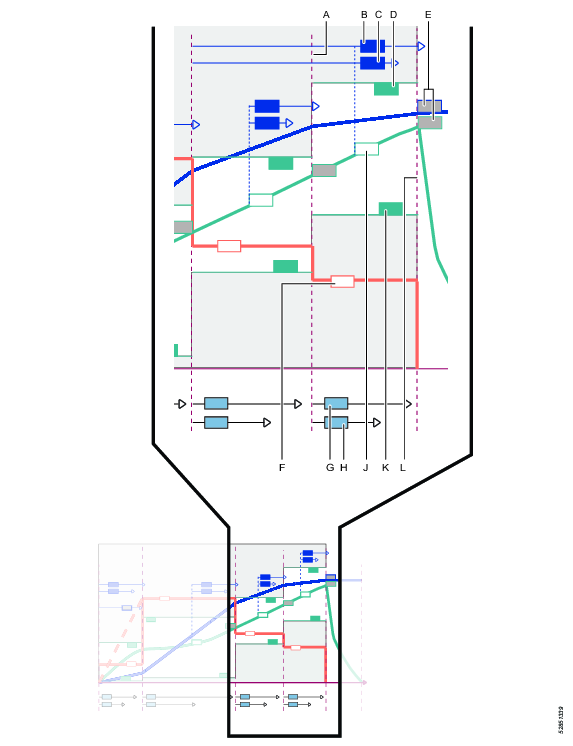
A | 最後の締め付けステップの開始 |
B | 最小角度(モニター);洗濯可能なリファレンス点から測定 |
C | 最大角度(モニター);洗濯可能なリファレンス点から測定 |
D | 最大トルクレベル(モニター) |
E | 最終ターゲットは、ターゲットトルクまたはターゲット角度のいずれかです;角度リファレンス点は、選択可能リファレンス点から測定されます |
F | 速度曲線と速度値 |
G | 最長時間(モニター) |
H | 最短時間(モニター) |
J | トルク曲線と最終の角度監視トルクリファレンス点 |
K | 最小トルク(モニター) |
L | ステップの終了 |
パラメータは、ターゲットトルクとターゲット角度の選択で異なります。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ターゲット | 最終ターゲットのドロップダウン選択。 トルク:締め付けステップの最終ターゲットはトルク値です。 角度:締め付けステップの最終ターゲットは角度値です。 |
|
ターゲット速度 | 手動または自動位置のあるスイッチ。 スイッチが自動位置にあれば、速度は、締め付けアルゴリズムによって自動で設定されます。 スイッチが手動位置にあれば、その後に速度は手動で設定されます。 | 自動 |
目標速度(パラメーター) | このパラメーターは、手動速度設定が選択された場合のみ表示されます。 このステップにおける主軸回転速度。これは rpm の数値で表現されます。 | 113 |
ターゲットトルク | ステップに対するターゲットトルクを定義します。 ステップの終わりは、ターゲットに達したときに、この時点で定義されます。 |
|
トルク限度 | 手動または自動位置のあるスイッチ。 最終のターゲット値がトルクに設定されている場合のみスイッチは表示されます。 スイッチが自動位置にあれば、トルク制限値は、締め付けアルゴリズムによって自動で設定されます。 スイッチが手動位置にあれば、最大トルク制限値と最小トルク制限値手動で設定されます。 | 自動 |
最小トルク | このパラメータは、手動トルク制限値が選択された場合にのみ表示されます。 ステップ中の最小トルク値。これは数値角度値で表現されます。 | 最終ターゲットトルク - 5% |
最大トルク | このパラメータは、手動トルク制限値が選択された場合にのみ表示されます。 ステップ中の最大トルク値。これは数値トルク値で表現されます。 | 最終ターゲットトルク + 20% |
角度限界 | 角度制限値のリファレンス点を選択するためのドロップダウンメニュー。
|
|
最後の角度監視トルク | 指定されたトルク値。この点から角度監視が開始します。この値は、最初のトルク値よりも大きく、最終目標トルクよりも小さくなければなりません。 |
|
最終最小角度 | このステップに対する最小主軸回転。測定のためのリファレンス点は、ドロップダウンメニュー角度制限値から選択します。これは数値度値で表現されます。 | 324 度 |
最終最大角度 | このステップに対する最大主軸回転。測定のためのリファレンス点は、ドロップダウンメニュー角度制限値から選択します。これは数値度値で表現されます。 | 396 度 |
最短時間 | ステップの最短時間。ステップの開始から測定。これは数値ミリ秒値で表現されます。 | 10 ms |
最長時間 | ステップの最長時間。ステップの開始から測定。これは数値ミリ秒値で表現されます。 | 1000 ms |
トルク測定点 | 最大トルク値 ピーク角度時の値 シャットオフ時の値 | 最大トルク値 |
角度を測定対象 | ピークトルク時の値 最大角度値 シャットオフ時の値 | 最大角度値 |
以下の表で指定された値は、締め付けステップの最初のステップがオンになっていることを前提としています。
パラメータ | 説明 | デフォルト値 |
|---|---|---|
ターゲット | トルク:締め付けステップの最終ターゲットはトルク値です。 角度:締め付けステップの最終ターゲットは角度値です。 |
|
ターゲット速度 | 自動位置にあれば、速度は、締め付けアルゴリズムによって自動的に設定されます。 手動の位置にある場合、速度は手動で設定されます。 | 自動 |
目標速度(パラメーター) | このパラメーターは、手動速度設定が選択された場合のみ表示されます。 このステップにおける主軸回転速度。 | 113 |
最小トルク | このパラメータは、手動トルク制限値が選択された場合にのみ表示されます。 ステップ中の最小トルク値。最初の目標トルクより大きくなければなりません。 |
|
最大トルク | このパラメータは、手動トルク制限値が選択された場合にのみ表示されます。 ステップ中の最大トルク値。 |
|
最終監督での最小トルク | この値を用いて、最終ステップ全体で最小トルクレベルが維持されることを監視して、それを確実にします。このレベルは、通常、最終の最小トルクよりも小さく設定されますが、ランダウントルクレベルよりも大きく設定されます。これを用いて、締め付け時にネジが破損していないことを確認できます。 | 18 Nm |
ターゲット角度 | ステップに対するターゲット角度を定義します。 ターゲット角度のリファレンス点は、以前有効にされたステップまたはステップの最後から測定されます。 ステップの終わりは、ターゲットに達したときに、この時点で定義されます。 | 360 度 |
角度限界 | 角度制限値のリファレンス点を選択するためのドロップダウンメニュー。
| 手動 |
最後の角度監視トルク | 指定されたトルク値。この点から角度監視が開始します。リファレンス点は、以前有効にされたステップまたはステップによります。 |
|
最小角度 | このステップに対する最小主軸回転。測定のためのリファレンス点は、ドロップダウンメニュー角度制限値から選択します。これは数値度値で表現されます。 | 324 度 |
最大角度 | このステップに対する最大主軸回転。測定のためのリファレンス点は、ドロップダウンメニュー角度制限値から選択します。 | 396 度 |
最短時間 | ステップの最短時間。ステップの開始から測定。 | 10 ms |
最長時間 | ステップの最長時間。ステップの開始から測定。 | 1000 ms |
トルク測定点 | 最大トルク値 ピーク角度時の値 シャットオフ時の値 | 最大トルク値 |
角度を測定対象 | ピークトルク時の値 最大角度値 シャットオフ時の値 | 最大角度値 |
トリガーを離したときに NG | On(オン) オフ | On(オン) |









































