简介
在本部分,您可以找到有关产品的基本信息以及主题中使用的格式约定。
概述
ToolsTalk 2是新一代控制器编程软件,将您的生产线管理带入新阶段基于客户端-服务器端的软件解决方案更利于快速方便进行配置,同时将给可视化和追溯性带给您的整个生产线体系基于最优的用户体验和扩展的独特特性它能根据您的需求进行定制和优化,更好完成任务通过内置的FMS功能管理系统,它允许您在任何时候对每一个工位单独进行购买并分配附件的功能具有100%的可定制用户权限,您可以在复杂的生产系统中进行质量控制,并提高生产关键操作的正常运行时间。
特性
配置PowerFocus6000、PF6 Flex系统、附件、多步拧紧,总线和软PLC
曲线分析与导出
整线结构管理
活动目录和用户管理
嵌入式功能管理系统
包含完整历史记录的程序库
离线和全局编程
产线软件可见性和管理
好处
由于简单和用户友好的界面,可减少所需的培训
使用全局程序和错误通知,可减少缺陷
通过快捷简易的整线配置,新产品导入更加高效
由于程序变更的可见性和可追溯性,从而提高了工作效率
由于实时结果分析和产线软件管理,增加了正常运行时间
100%定制用户访问权限,实现全线的控制
一般数据保护条例(GDPR)
本产品提供了处理个人身份信息的可能性,例如系统用户名、角色和 IP 地址。这种处理能力的目的可能是通过可追溯性和适当的访问管理来加强质量控制。
如果您决定处理个人数据,您需要了解并遵守相关的个人数据保护规则,包括 EU GDPR 以及任何其他适用的指令和法规。对于您对本产品的任何使用,阿特拉斯·科普柯不承担任何责任。
责任和警告
责任
在工作环境下,许多情况可能影响拧紧流程,为此须对结果进行验证。在此,我们要求用户遵守相关标准和/或法规,在出现可能影响拧紧结果的情况后,检查安装的扭矩和旋转方向。此类情况的示例包括但不限于:
工具系统初始安装
更改部件批次、螺栓、螺钉批次、工具、软件、配置或环境
更改通风或电气连接
更改管路人体工程学特性、流程、质量程序或操作法
更换操作员
任何影响拧紧流程结果的其他变更
检查应:
确保未因发生的影响情况改变接头状况。
在设备初始安装、维护或修理后实施。
至少在每次换班后检查一次或以合适的频率进行检查。
修订历史
文档修订 | ToolsTalk 2 软件版本 | 变更内容 |
|---|---|---|
12.0 | 2.14 |
|
11.0 | 2.13.4 |
|
10.0 | 2.13 |
|
9.0 | 2.12 |
|
8.0 | 2.11 | 不适用 |
7.0 | 2.9 | 不适用 |
6.0 | 2.8 | 不适用 |
5.1 | 2.7.1 | 不适用 |
5.0 | 2.7 | 不适用 |
4.0 | 2.6 | 不适用 |
3.0 | 2.5 | 不适用 |
2.0 | 2.4 | 不适用 |
1.0 | 2.3 | 第一版 |
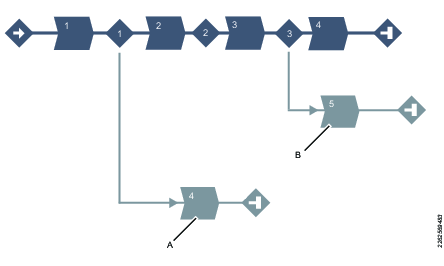
系统概述
制造系统可以由图中的功能块组成:
A | 工厂网络。 | H | 控制器工厂端口:连接至工厂网络。 |
B | ToolsNet 服务器:用于存储拧紧结果和进行统计分析。 | I | Power Focus 6000 控制器:与手持工具一起使用。 |
C | ToolsTalk 2 服务器:用于控制器和 IXB 工具的配置和参数设置。 | J | 手持电池工具:使用无线连接到控制器。 |
D | 工业计算机(IPC):可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | K | PF6 Flex 控制器:与夹具工具一起使用。 |
E | 连接到工厂网络的便携式计算机:可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | L | IXB 手持电池工具:使用无线连接到工厂网络。 |
F | 服务电脑:可以连接到控制器或 IXB 工具的服务端口。 | M | 互联网云。 |
G | 控制器服务端口:可用于连接服务电脑。 | N | Atlas Copco 许可门户(ACLP):位于 Atlas Copco,为功能管理系统(FMS)中的许可功能提供支持。 |
软件结构
图标 | 说明 |
|---|---|
 | ToolsTalk 2 系统用户管理。选择语言、温度和扭矩单位。 |
 | 帮助图标显示下列信息:
|
 | 工厂结构 在工厂结构工作区内,选择单独的控制器。工作区分为几个图标。每个图标下的菜单用于配置数据和参数设置。 这些图标与控制器界面和 web 界面不同,但是在分区和每个界面下可以进行的配置方面非常相似。 |
 | 拧紧程序 选择后,工作区将显示现有拧紧程序列表。选择单个程序将打开不同的菜单,以配置和设置所选拧紧程序的参数。 |
 | 批次序列 选择后,工作区将显示现有批次序列列表。选择单个批次序列将打开不同的菜单,以配置和设置所选批次序列的参数。 |
 | 同步模式 该图标仅适用于具有并行多步骤功能的控制器。 工作区用于配置和设置所有同步多步骤拧紧程序的参数。 |
 | 配置 选择后,工作区将显示现有配置列表。配置和设置参数的菜单因所选的设备类型而异:
|
 | 工具 工作区用于显示哪些工具连接到控制器,并查看和设置工具维护间隔和校准数据。 |
 | 虚拟站点 选择后,工作区将显示现有虚拟站点列表。选择单个虚拟站点将打开不同的菜单,以配置和设置以下参数:
|
 | 控制器信息 控制器中包含的控制器硬件和软件模块。 |
 | 现场总线和 SoftPLC 工作区用于配置现场总线、非循环数据和 SoftPLC 设置。 |
 | 设置
|
 | 结果 显示所选控制器的最新拧紧结果。结果可以以表格格式或图形轨迹格式显示。 |
 | 事件 显示所选控制器的最新拧紧事件。定义在设置 |
 | 库 包含可以在控制器之间重复使用的管理库模板的子菜单。 |
 | 控制器库 控制器配置库。它在站点设置模式下非常有用,它在单台笔记本电脑上提供 ToolsTalk 2 功能,无需安装服务器。 |
 | 程序模板库 该库包含多步骤程序,它们被保存作为创建新的多步骤程序时要使用的模板。编辑多步骤程序模板不会影响基于该模板的多步骤程序。 |
 | 拧紧程序库 拧紧程序库。可以将现有的拧紧程序复制到库中。编辑库中的拧紧程序会影响订阅拧紧程序的所有控制器。 |
 | 配置库 用于虚拟站点、设备和附件的配置库。可以将现有配置复制到库中。编辑库配置将影响订阅配置的所有控制器。 |
 | 现场总线库 现场总线配置库。可以将现有的现场总线配置复制到库中。编辑现场总线配置将影响所有订阅现场总线配置的控制器。 |
 | 设置库 用于事件配置的库,可以分配给其他控制器。可以在此处或在设置 |
 | 系统管理 包括软件更新、配置参数的导入/导出、任务调度和功能管理系统的功能。 |
 | 控制器软件和数据管理 通过 ToolsTalk 2 服务器管理控制器软件。 |
 | 计划内导出和导入 计划影响一个或多个控制器以及由 ToolsTalk 2 服务器执行的重复任务。 |
 | 比较配置 选择要比较的配置文件。 |
 | 用户组 管理不同的用户组和用户组对文件夹、控制器和配置的权限。 |
 | 功能管理系统 (FMS) 通过 ToolsTalk 2 服务器管理许可的控制器功能。 |
 | 程序批准 管理有关拧紧和拧松计划的批准。 |
 | 推送 在 ToolsTalk 2 中对任何控制器进行了配置时,显示推送指示符。 配置和参数更改通过推送功能复制到控制器。 |
控制器图标与控制器图形用户界面和 Web 图形用户界面不同,但在分区和每个图标下可以进行的配置方面非常相似。
配置选项
控制器的配置和设置可以通过以下方式进行:
控制器图形用户界面:这适用于具有触摸屏的 Power Focus 6000 控制器。可以配置控制器,无论它是否连接到网络。
Web 图形用户界面:PC 可以直接连接到控制器服务端口,如果控制器连接到网络并且其 IP 地址是已知的,则可以从网络上的任何位置的计算机访问控制器。一次可以访问一个控制器。对于 Power Focus 6000,web-GUI 具有与控制器图形用户界面相同的图标。对于 FlexController,图标则略有不同。所有控制器可能都具有唯一的图标。
ToolsTalk 2 图形用户界面:如果控制器连接到 ToolsTalk 2 服务器,ToolsTalk 2 客户端 (PC) 可以通过 ToolsTalk 2 图形用户界面访问所有连接的控制器。Power Focus 6000 控制器和 FlexController 都可以被访问。图形用户界面使用完整的计算机屏幕,并具有不同的分区和不同的图标,但提供相同的功能。
站点设置模式下的 ToolsTalk 2 图形用户界面:在没有服务器安装的计算机上提供一个 ToolsTalk 2 界面。计算机连接到控制器服务端口,并一次访问一个控制器。
规则
为了增强用户的了解,本文档中使用了某些格式约定。所使用的格式约定列出如下。
元素 | 符号 | 说明 | 输出 |
|---|---|---|---|
一般重点 | 在程序工作区中。 | 使某些文本元素脱颖而出,或突出显示。 | 文字为粗体 |
图形用户界面 (GUI) 项目 | 选择功能按钮。 | 对在图形用户界面 (GUI) 屏幕上找到的项目的任何引用(例如:命令按钮、图标名称和字段名称)。 | 文字为粗体 |
图形用户界面 (GUI) 路径 > | 通常,在图形用户界面 (GUI) 的顶部。 | 导航辅助工具,可在图形用户界面 (GUI) 中跟踪位置。 | 例如:控制器 > 程序 > 编辑 |
用户输入 | 输入程序的说明。 | 用户输入的任何文本 | 文字为粗体 |
文件名 | 输入导出的文件名。 | 文件被导出或导入系统中 | 文字为粗斜体 |
变量和参数名称 | 输入导出的名称。 | 变量和参数名称(非值)。 | 文字为斜体 |
变量和参数值 | 输入导出的值。 | 变量和参数值。 | 文字为粗体大写 |
系统输出 | Client.Domain.Models.ExportImportConfiguration | 系统输出的任何文本。 | 文字为等宽字体 |
外部链接 | 指向具有与文档或主题内容相关的信息的外部站点的链接。这些可能包括:
| 可选文本到外部站点 | |
内部文档链接 |
如果可用,这些链接将显示在文本下方。 | 可选文本到内部内容 |
许可级别
Line Licenser、Line Configurator 和 Line Manager
这三个版本都是 ToolsTalk 2 的所有基于客户端-服务器的安装,但是具有不同的特征集。Line Licenser 是在没有安装其他任何许可证的情况下,ToolsTalk 2 进入干净安装的最小软件包。当 ToolsTalk 2 的状态为 Line Licenser 时,所有 Line Manager 和 Line Configurator 功能都将可见,但是每次用户尝试使用所包含的功能时,都会出现一条警告消息。
如果启动降级,ToolsTalk 2 将仅删除、取消链接或删除在 Line Manager 中创建的数据。例如,当降级到 Line Configurator 许可证时,或者 Line Manager 许可证的试用期到期时,可能会发生这种情况。
站点设置
这是 ToolsTalk 2 的版本,其中所有组件都位于计算机本地,从而提供一对一的连接。Station Setup 在没有 SQL Server 数据库连接的情况下运行,并且具有内置限制,一次只能启用一个连接的控制器。注意,使用 Station Setup 需要有效的许可证,否则将显示警告消息。
未经许可的工作站设置可以有一个虚拟站点,这将根据许可服务器进行验证。
许可功能
符号 | 说明 |
|---|---|
X | 完整的功能。 |
X¹ | 已启用连接、断开连接和重新启动。 |
X² | 如果进行更改,则启用推送。 |
X³ | 自定义部分、重新启动和右键点击功能已启用。 |
X⁴ | 仅启用数据库维护。 |
X⁵ | 仅读访问权限,已启用程序导出。 |
Line Licenser | Line Configurator | 站点设置已许可 | Line Manager | |
|---|---|---|---|---|
工厂结构 | ||||
右键点击 - 添加新控制器 | X | X | X | X |
右键点击功能 | X¹ | X | X | X |
程序配置历史 | X | |||
拧紧程序 | X⁵ | X | X | X |
批次序列 | X⁵ | X | X | X |
源 | X⁵ | X | X | X |
配置 | X⁵ | X | X | X |
工具 | X⁵ | X | X | X |
虚拟站点 | X⁵ | X | X | X |
控制器 | X⁵ | X | X | X |
设置 | X⁵ | X | X | X |
现场总线 | X² | X | X | X |
SoftPLC | X | X | X | |
结果 | X | X | X | |
事件 | X | X | X | X |
库 | ||||
拧紧程序 | X | |||
配置 | X | |||
现场总线 | X | |||
设置 | X | |||
程序模板 | X | |||
控制器配置 | X | X | X | |
系统管理 | ||||
控制器软件和数据管理 | X³ | X³ | X | |
计划任务 | X⁴ | X⁴ | X⁴ | X |
功能管理系统 (FMS) | X | X | X | X |
用户组 | X | |||
计划批准 | X |
安装和升级
在本部分,您可以找到有助于产品初始安装或从一个版本升级到另一个版本的信息。
安装限制
兼容性矩阵
除非另有说明,否则所有 ToolsTalk 2 软件版本都向后兼容
ToolsTalk2 | PF6 FlexSystem | PF6000 | PF6000 StepSync | Atlas Copco Data Communication 版本 | IXB | PF8 | PF8 StepSync |
|---|---|---|---|---|---|---|---|
2.3 | 不适用 | 2.0, 2.1, 2.1.1, 2.3 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.4 | 不适用 | 2.4 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.5 | 1.2 | 2.4 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.6 | 1.2 | 2.5 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.7 | 1.3 | 2.6 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.7.1 | 1.3.1 | 2.6 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.8 | 1.3.1 | 2.7 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.9 | 2.0 | 2.7 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.11 | 2.1 | 2.8 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 |
2.12 | 3.0 | 3.0 | 3.0 | 不适用 | 不适用 | 不适用 | 不适用 |
2.13 | 3.1 | 3.1.1 | 3.1.1 | 1.7 | 不适用 | 不适用 | 不适用 |
2.14 | 3.3 | 3.3 | 3.3 | 1.9 | 3.3 | 不适用 | 不适用 |
ToolsTalk 2 可以运行 Atlas Copco Data Communication 的更高版本。矩阵中提到的 Atlas Copco Data Communication 版本应被视为 ToolsTalk 2 软件兼容的最低版本。
安装或升级之前
不建议在同一台计算机上同时安装站点设置和客户端-服务器。确保从不需要安装的组件卸载并清除计算机。
服务器安装
Microsoft SQL 数据库、ToolsTalk 2 服务器应用程序和 ToolsTalk 2 客户端应用程序都可以安装在同一台计算机上。
在开始安装之前,请确保以下内容可用:
要安装服务器应用程序的计算机的管理员权限。
要安装客户端应用程序的计算机的管理员权限。
根据所列出先决条件的计算机和程序。
根据所列出先决条件完成 64 位 Microsoft SQL 数据库的安装。
服务器应用程序的可执行文件。
客户端应用程序的可执行文件。
Atlas Copco Data Communication (ACDC) 已安装并正在运行,并且与 ToolsTalk 2 的当前版本兼容(仅适用于 ToolsTalk 2 2.13 及更高版本)。请参见 Atlas Copco Data Communication 安装手册。
站点设置
在开始安装之前,请确保以下内容可用:
要安装应用程序的计算机的管理员权限。
根据所列出先决条件的计算机和程序。
Station Setup 应用程序的可执行文件。
数据库要求
所有控制器数据和配置都存储在数据库目录中。数据库是一个标准的 64 位 Microsoft SQL 数据库。
本文档中不介绍 Microsoft SQL 数据库的安装。建议遵循标准安装。
Microsoft SQL 数据库可能与 ToolsTalk 2应用程序位于同一服务器或同一网络上。
如果数据库位于其他位置,则数据库与 ToolsTalk 2应用程序服务器之间的防火墙需正确配置。
必须知道 Atlas Copco 数据通信服务器的 IP 地址,并将其输入到与 ToolsTalk 2连接的每个控制器中
如果正在使用远程连接,客户端计算机必须知道托管 ToolsTalk 2应用程序的服务器地址。
安装 Microsoft SQL 数据库的强制要求
64 位 Microsoft SQL。
选择 Microsoft SQL 服务器身份验证和 Windows 身份验证。
安装 Microsoft SQL 数据库的建议要求
在安装中包含的管理工作室。
启用默认实例。
计算机要求
ToolsTalk 2 生态系统需要以下功能:
客户端、服务器、站点设置和 ClickOnce 需要 64 位。
区域 | 类别 | 最低要求 | ToolsTalk 2 发布版本 | 注释 |
|---|---|---|---|---|
服务器软件要求 | 数据库 | SQL Server 2014 R2 或更高版本 SQL Express 2014 R2 或更高版本(兼容,但不建议) | 数据库可以位于同一台机器上或安装在远程数据库服务器上。 | |
Java | 版本 8 或更新版本 | ≥2.3 | 64 位 版本 | |
.NET Framework | 版本 4.6 | 2.3 - 2.4 | ||
版本 4.6.2 | 2.5 - 2.12 | |||
版本 4.8 | 2.13 - 当前版本 | |||
服务器硬件要求 | 处理器 | 双核 2.70 GHz Intel Xenon 或更高版本 | 本规范仅用于指出所需的性能。 | |
内存(RAM) | 4 GB | 本规范仅用于指出所需的性能。 | ||
磁盘空间 | 50 GB | 注意数据库将随着时间的推移而增长。配置和配置更改存储到数据库中。多个控制器也将添加更多的信息到数据库中。 | ||
磁盘速度 | 5400 rpm 或更高 | |||
PC 客户端要求 | 操作系统 | Windows 10 Windows 7 | 2.14 2.3 - 2.13 | ToolsTalk 2 2.14 版不支持 Windows 7! |
.NET Framework | 版本 4.6 | 2.3 - 2.4 | ||
版本 4.6.2 | ≥2.5 - 2.12 | |||
版本 4.8 | 2.13 - 当前版本 | |||
用户权限 | 数据库访问 | 系统管理员访问或类似 | 执行安装的用户还必须具有在数据库中创建用户的管理员权限。 | |
Windows 访问 | 管理员帐号 | 需要安装应用程序及其依赖关系。 |
许可要求
当功能管理系统(FMS)用于许可的功能项目时,这时将需要 Atlas Copco 许可服务器。
许可服务器包含在服务器安装文件中。为了正确安装,JAVA_HOME 系统变量在 64 位 Java 安装时必须具有正确的路径和指向。
FMS 只能在客户端-服务器安装中使用,并且不适用于站台设置安装。
安装顺序
任何 ToolsTalk 2 应用程序的安装顺序应如下:
在安装之前,请确保满足所有计算机和数据库要求。
安装 Microsoft SQL 服务器。
如果适用,请安装 Atlas Copco Data Communication。

有关更多信息,请参见 Atlas Copco Data Communication 安装指南。
安装所需的 ToolsTalk 2 应用程序。
如果安装 ToolsTalk 2 客户端应用程序,请部署 ToolsTalk 2 应用程序,或者从开始菜单运行该应用程序,并在需要时创建快捷方式。
许可 ToolsTalk 2 应用程序,以便您获得已订阅的正确功能。
软件安装
ToolsTalk2 配置窗口
通过 ToolsTalk 2配置,可以先完成ToolsTalk 2 软件的安装,然后配置不同的安装参数。每种安装类型的 ToolsTalk 2配置都可以在安装后的开始菜单中用作快捷方式,因此可以随时对其进行访问以更改安装参数。
默认安装位置
安装 | 默认位置 | 备注 |
|---|---|---|
ToolsTalk 2 服务器 | C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\ | 可由用户更改到所需位置 |
ToolsTalk 2 ClickOnce | C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ | 可由用户更改到所需位置 |
ToolsTalk 2 客户端 | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\ | 可由用户更改到所需位置 |
ToolsTalk 2 StationSetup | C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ | 可由用户更改到所需位置 |
AtlasCopco FMS | C:\ProgramData\AtlasCopcoFMS\ | 不应更改默认路径! |
Flexera Logs | C:\Windows\ServiceProfiles\NetworkService\Flexnetls\acopco\logs | 不应更改默认路径! |
安装 ToolsTalk Server 应用程序
在开始 ToolsTalk 2 服务器安装之前,请确保满足安装或更新前所述的所有要求。
在安装服务器应用程序之前,请确保已安装并正在运行的 Atlas Copco Data Communication (ACDC) 与 ToolsTalk 2 的当前版本兼容(仅适用于 ToolsTalk 2 2.13 以后的版本)。请参见 Atlas Copco Data Communication 安装手册。
将可执行文件 ToolsTalkServer<xxx>.exe 放在计算机上所需的文件夹中。<xxx> 表示文件的版本。
双击可执行文件。
在是否要允许此应用对您的设备进行更改?中选择是
在 Atlas Copco Tools Talk Server - InstallShield Wizard 窗口中选择下一步以继续。
阅读,然后选择我接受许可协议中的条款。点击下一步继续。
如果要打印许可协议,请选择打印。
选择更改...以将应用程序安装在其他位置。默认位置为 C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\
点击下一步继续。
点击 安装启动安装。
选择完成以完成安装,然后将打开 ToolsTalk 2 配置窗口,或者可能会弹出来自 Windows 的用户访问控制对话框。
如果 Windows 提示请求权限的用户访问控制对话框,请在是否要允许此应用对设备进行更改?中选择是
安装完成后,将打开 ToolsTalk 2 配置窗口。
如果选择否,则 ToolsTalk2 配置窗口不会自动打开,您需要从 Windows 开始菜单访问它。如果从 Windows 开始菜单中打开了 ToolsTalk 2 配置器,请在 ToolsTalk 2 配置窗口的底部选择强制初始化,以完成安装过程。
如果在安装过程中发生错误、步骤不清楚或参数名称或值不清楚,请在疑难解答部分中查找更多信息。
在服务器设置中输入参数。
选择保存将保存服务器设置并尝试重新启动服务。
如果在输入并完成数据库安装设置之前选择保存,则会出现一则出错消息接受更改,但无法控制依赖的 Windows 服务。
转到数据库安装设置,输入用户名和密码,然后选择测试连接以测试数据库连接。
用户名和密码应与用于 Microsoft SQL Server 安装的名称相同。
选择安装数据库。
成功安装数据库后,将显示消息数据库创建成功。
选择保存和关闭。
如果收到有关未启动依赖的服务的通知,请重新启动 FNLS-acopco 服务,然后再次重新启动 ToolsTalk 2 配置。当两个服务都启动并运行时,继续安装。
服务器设置参数
参数 | 说明 |
|---|---|
SQL 服务器地址 | SQL Server 的 IP 或主机名 Microsoft Windows Defender 防火墙将阻止通过网络连接到 SQL 服务器。因此,需要将 SQL 服务器配置为使用 TCP/IP 接受连接。可以在 Windows 计算机管理的 SQL 服务器配置管理器部分中修改此设置。 计算机管理 -> SQL 服务器配置管理器 -> SQL 服务器网络配置 -> MSSQLSERVER 协议 -> TCP/IP -> 启用 |
数据库名称 | ToolsTalk 2 所使用的数据库/目录。如果数据库不存在,则将在数据库安装期间创建该数据库。 |
参数 | 说明 |
|---|---|
身份验证模式 | 用于验证用户权限的身份验证模式。选择 Windows(活动目录)或无。 |
活动目录组 | 仅在选择的身份验证模式为 Windows 时可见。指定用户必须属于哪个活动目录组。例如:DOMAIN\GROUP |
服务器地址 | ToolsTalk 2 服务器的 IP 或主机名。 |
Web 应用程序端口 | ToolsTalk 2 的通信端口。 |
控制器端口 | 端口 9016 用作默认控制器端口。如果使用端口 9016,请确保此端口已打开并且可以连接到该端口,否则该应用程序将无法运行。 当从 ToolsTalk 2 使用“连接/断开/添加控制器”功能与控制器进行交互时,端口 80 将被使用。 |
确保您输入的控制器端口是打开的并且可以连接!
参数 | 说明 |
|---|---|
控制器备份文件夹 | 指定控制器备份所在的文件夹。 |
参数 | 说明 |
|---|---|
服务器地址 | Atlas Copco Data Communication 服务器的 IP 或主机名 |
Web API 端口 | Web API 端口 |
SignalR 端口 | SignalR 的端口 |
数据库安装设置
参数 | 说明 |
|---|---|
用户名称 | 具有创建数据库/目录的凭据的数据库用户的用户名。通常是系统管理员凭证。 |
密码 | 输入密码。通常是系统管理员凭证 |
参数 | 说明 |
|---|---|
手动脚本 | 指定是否已手动创建数据库。 如果选中此框,则 ToolsTalk 2 预期您已经手动创建了 SQL 目录和默认用户。输入的用户名和密码将是连接到SQL Server的默认凭据,并以明文形式存储在配置文件中。 仅当您创建数据库目录并自己创建用户时,才应使用此设置。 |
ToolsTalk 2 应用程序在开始菜单中可用。
安装客户端应用程序
在开始 ToolsTalk 2 客户端安装之前,请确保满足安装前所述的所有要求。
将可执行文件 ToolsTalkClientxxx>.exe 放在计算机上的目标文件夹中。<xxx> 表示文件的版本。
双击可执行文件。
在是否要允许此应用对您的设备进行更改?中选择是
在 Atlas Copco Tools Talk Server - InstallShield Wizard 窗口中选择是以继续。
阅读,然后选择我接受许可协议中的条款。点击下一步继续。
如果要打印许可协议,请选择打印。
选择更改...以将应用程序安装在其他位置。默认位置是 C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\
点击下一步继续。
点击 安装启动安装。
选择完成以完成安装。
如果在安装过程中发生错误、步骤不清楚或参数名称或值不清楚,请在疑难解答部分中查找更多信息。
安装完成后,将打开 ToolsTalk 2 配置窗口。
在客户端设置中输入参数,然后选择保存。
服务器设置 参数
说明
身份验证模式
用于验证用户权限的身份验证模式。选择 Windows(活动目录)或无。
服务器地址
ToolsTalk 2 服务器的 IP 或主机名。
Web 应用程序端口
ToolsTalk 2 的通信端口。
将服务 URL 转换为 IP 地址
开启或关闭。选择开启时,如果在地址中使用了主机名,则会将其转换为 IP 地址。
ToolsTalk 2 应用程序已安装,并且在桌面上提供了快捷方式。
使用 ClickOnce 安装客户端
将可执行文件 ToolsTalkServerClickOnce<xxx>.exe 放在计算机上所需的文件夹中。<xxx> 表示文件的版本。
双击可执行文件。
在是否要允许此应用对您的设备进行更改?中选择是
在 Atlas Copco Tools Talk Server ClickOnce - InstallShield Wizard 窗口中选择下一步以继续。
阅读,然后选择我接受许可协议中的条款。点击下一步继续。
如果要打印许可协议,请选择打印。
选择更改...以将应用程序安装在其他位置。默认位置是 C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\
点击下一步继续。
点击 安装启动安装。
选择完成以完成安装,然后将打开 ToolsTalk 2 配置窗口,或者可能会弹出来自 Windows 的用户访问控制对话框。
如果 Windows 提示请求权限的用户访问控制对话框,请在是否要允许此应用对设备进行更改?中选择是
安装完成后,将打开 ToolsTalk 2 配置窗口。
如果选择否,则 ToolsTalk 2 配置窗口不会自动打开,您需要从Windows开始菜单访问它。如果从 Windows 开始菜单中打开了 ToolsTalk 2 配置器,请在 ToolsTalk 2 配置窗口的底部选择强制初始化,以完成安装过程。
如果在安装过程中发生错误、步骤不清楚或参数名称或值不清楚,请在疑难解答部分中查找更多信息。
在服务器设置中输入参数。
选择保存将保存服务器设置并尝试重新启动服务。
如果在输入并完成数据库安装设置之前选择保存,则会出现一则出错消息接受更改,但无法控制依赖的 Windows 服务。
转到数据库安装设置,输入用户名和密码,然后选择测试连接以测试数据库连接。
用户名和密码应与用于 Microsoft SQL Server 安装的名称相同。
选择安装数据库。
成功安装数据库后,将显示消息数据库创建成功。
选择保存和关闭。
如果收到有关未启动从属服务的通知,请重新启动 FNLS-acopco 服务,然后再次重新启动 ToolsTalk 2 配置。当两个服务都启动并运行时,继续安装。
服务器设置参数
参数 | 说明 |
|---|---|
SQL 服务器地址 | SQL Server 的 IP 或主机名 Microsoft Windows Defender 防火墙将阻止通过网络连接到 SQL 服务器。因此,需要将 SQL 服务器配置为使用 TCP/IP 接受连接。可以在 Windows 计算机管理的 SQL 服务器配置管理器部分中修改此设置。 计算机管理 -> SQL 服务器配置管理器 -> SQL 服务器网络配置 -> MSSQLSERVER 协议 -> TCP/IP -> 启用 |
数据库名称 | ToolsTalk 2 所使用的数据库/目录。如果数据库不存在,则将在数据库安装期间创建该数据库。 |
参数 | 说明 |
|---|---|
身份验证模式 | 用于验证用户权限的身份验证模式。选择 Windows(活动目录)或无。 |
活动目录组 | 仅在选择的身份验证模式为 Windows 时可见。指定用户必须属于哪个活动目录组。例如:DOMAIN\GROUP |
服务器地址 | ToolsTalk 2 服务器的 IP 或主机名。 |
Web 应用程序端口 | ToolsTalk 2 的通信端口。 |
控制器端口 | 端口 9016 用作默认控制器端口。如果使用端口 9016,请确保此端口已打开并且可以连接到该端口,否则该应用程序将无法运行。 当从 ToolsTalk 2 使用“连接/断开/添加控制器”功能与控制器进行交互时,端口 80 将被使用。 |
将服务 URL 转换为 IP 地址 | 开启或关闭。选择开启时,如果在地址中使用了主机名,则会将其转换为 IP 地址。 |
确保您输入的控制器端口是打开的并且可以连接!
参数 | 说明 |
|---|---|
控制器备份文件夹 | 指定控制器备份所在的文件夹。 |
默认情况下,活动目录组和控制器备份文件夹为空。
参数 | 说明 |
|---|---|
服务器地址 | Atlas Copco Data Communication 服务器的 IP 或主机名 |
Web API 端口 | Web API 端口 |
SignaIR 端口 | SignaIR 的端口 |
数据库安装设置
参数 | 说明 |
|---|---|
用户名称 | 具有创建数据库/目录的凭据的数据库用户的用户名。通常是系统管理员凭证。 |
密码 | 输入密码。通常是系统管理员凭证 |
参数 | 说明 |
|---|---|
手动脚本 | 指定是否已手动创建数据库。 如果选中此框,则 ToolsTalk 2 预期您已经手动创建了 SQL 目录和默认用户。输入的用户名和密码将是连接到SQL Server的默认凭据,并以明文形式存储在配置文件中。 仅当您创建数据库目录并自己创建用户时,才应使用此设置。 |
在远程计算机上部署客户端
使用链接并通过网络浏览器浏览到服务器:
http://<FULL COMPUTER NAME>:<PORT NUMBER>/deploym

更换 <FULL COMPUTER NAME> 和 <PORT NUMBER>。
确保 <FULL COMPUTER NAME> 与服务器和数据库所在的位置完全相同。如果设置了完整计算机名 [TOOLSE277256.ATLASCOPCO.COM] 或计算机名 [TOOLSE277256],则 DNS 服务器必须存在于控制器中并进行设置,否则无法将控制器添加到 ToolsTalk 2 环境。
在您的计算机上保存可执行文件 ToolsTalk.Client.WPF.Desktop.application。
双击可执行文件,或者如果出现提示,请选择打开。
ToolsTalk 2 客户端打开并安装了最新版本。
ToolsTalk 2 客户端将始终通过使用ClickOnce打开最新的服务器版本。
在本地计算机上部署客户端
如果 ClickOnce 已安装在默认文件夹中,请导航至“C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ClientDeploy”,然后双击 ToolsTalk.Client.WPF.Desktop 应用程序清单文件来部署客户端。
安装完成后,将在桌面上创建 ToolsTalk 2 图标。
安装站点设置应用程序
压缩版 Station Setup 安装具有完整的控制器配置功能,但也有一些限制:
整个安装的占位面积更小,安装在便携式计算机上。
一次只能管理一个物理控制器。
计算机连接到控制器的服务端口,以避免正常活动中断。
应用
此操作模式的典型应用如下:
可以使用 ToolsTalk 2 访问控制器,无需连接到客户网络,而是使用控制器的服务端口。
使用控制器库功能的控制器离线配置。配置文件可以稍后传输到真实的控制器进行验证。
控制器配置的简单导出,非常有助于调试任务。
在开始 ToolsTalk 2 Station Setup 安装之前,请确保满足安装或升级前部分所述的所有要求。
将可执行文件 ToolsTalkStationSetup<xxx>.exe 放在计算机上所需的文件夹中。<xxx> 表示文件的版本。
双击可执行文件。
在是否要允许此应用对您的设备进行更改?中选择是
在 Atlas Copco Tools Talk Server - InstallShield Wizard 窗口中选择下一步以继续。
阅读,然后选择我接受许可协议中的条款。点击下一步继续。
如果要打印许可协议,请选择打印。
选择更改...以将应用程序安装在其他位置。默认位置是 C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\
点击下一步继续。
点击 安装启动安装。
选择完成以完成安装。
如果在安装过程中发生错误、步骤不清楚或参数名称或值不清楚,请在疑难解答部分中查找更多信息。
安装完成后,将打开 ToolsTalk 2 配置窗口。
在服务器设置选项卡中输入参数,然后选择保存。
参数 | 说明 |
|---|---|
ToolsTalk 用户名 | 应用程序本地用户的用户名。 |
服务器地址 | ToolsTalk 2 服务器的 IP 或主机名。 |
Web 应用程序端口 | ToolsTalk 2 的通信端口。 |
参数 | 说明 |
|---|---|
Web API | Web API 端口 |
SignalR | SignalR 端口 |
控制器端口 | 端口 9016 用作默认控制器端口。如果使用端口 9016,请确保此端口已打开并且可以连接到该端口,否则该应用程序将无法运行。 当从 ToolsTalk 2 使用“连接/断开/添加控制器”功能与控制器进行交互时,端口 80 将被使用。 |
确保您输入的控制器端口是打开的并且可以连接!
ToolsTalk 2 应用程序在开始菜单中可用。
站点设置连接
具有 ToolsTalk 2 站点设置的计算机可以通过网络或直接连接到服务端口连接到控制器。
网络连接
控制器中的 ToolsTalk 2 服务器连接地址必须定向到此计算机。这通过控制器图形用户界面或控制器 Web 图形用户界面完成。
一次只能有一个控制器可以连接到具有 ToolsTalk 2 站点设置的计算机。如果在线控制器连接到 ToolsTalk 2 站点设置计算机,则其他控制器的后续连接尝试将被忽略。
控制器服务端口连接
当不允许将安装了 ToolsTalk 2 的 PC 与网络连接时,可以使用控制器服务端口将控制器连接到 ToolsTalk 2。例如,Atlas Copco 或外部服务技术人员访问工厂,不允许外部计算机连接到工厂网络。
如果计算机连接到控制器的服务端口,则控制器充当 DHCP 服务器,并向计算机提供 IP 地址。该地址必须输入到 ToolsTalk 2 连接的控制器服务器连接地址字段中。
文件比较
配置程序将所有配置设置的副本存储为名为 Storage 的 .xml 文件。该文件有助于识别产品配置 .xml 文件中的手动更改。如果产品配置 .xml 文件已被修改,则在启动配置程序时,文件比较窗口将打开,您可以在其中选择使用存储文件或使用配置文件。
SoftPLC Configurator 安装
为了能够在控制器中使用 SoftPLC 功能,必须在安装 ToolsTalk 2 Client 的计算机上安装 SoftPLC Configurator。
插入包含MultiProg551_Atlas_Installation的 USB 装置或类似物。
在 MultiProg551_Atlas_Installation 中双击 Installation.bat,安装开始。
安装完成后打开 ToolsTalk 客户端(不需要重新启动)。
在 ToolsTalk 2 客户端中,转到现场总线和 SoftPLC
 选项卡。选择 SoftPLC 配置部分,在常规 SoftPLC 设置中,将 SoftPLC 设置为开启。
选项卡。选择 SoftPLC 配置部分,在常规 SoftPLC 设置中,将 SoftPLC 设置为开启。
卸载软件
每一个模块(客户端、服务器、站点设置)都可以通过如下方式卸载:
使用 Windows 控制面板/程序和功能来选择和卸载所需的程序和模块。
对于某些模块,可能需要重新启动计算机才能使更改生效。
安装验证
验证 Windows 系统服务
要验证后台程序和服务是否正确启动,请执行以下检查:
选择 Windows 搜索按钮。
在搜索窗口输入框中键入服务。
向下滚动并确认 ToolsTalk 的 Atlas Copco 工业技术主机已经启动。
这表示 ToolsTalk 2服务器应用程序正在运行。
向下滚动并验证 FlexNet 许可服务器-acopco 是否已启动。
这表示功能管理系统的许可服务器应用程序正在运行。
验证客户端-服务器安装
在成功安装客户端-服务器版本的 ToolsTalk 2 应用程序后,需要一个控制器进行完整的系统测试。
服务器计算机必须连接到网络。
客户端计算机必须连接到网络。
控制器必须连接到网络并配置为与服务器计算机进行通信。
检查是否启动了 Atlas Copco Data Communication 服务。
服务器和客户端可能安装在同一台计算机上。
有关配置和启动控制器的信息,请参阅控制器用户指南。
有关 ToolsTalk 2 图形用户界面的启动和导航配置,请参阅 ToolsTalk 2 用户指南。
如果安装了 ToolsTalk 2 客户端,则可以通过以下方式启动应用程序:
选择 Windows 开始菜单并找到 ToolsTalk 2 文件夹。
选择 ToolsTalk 2 图标
 启动该应用程序。
启动该应用程序。
验证站点设置安装
如果安装了 ToolsTalk 2 Station Setup,则可以通过以下方式启动应用程序:
选择 Windows 开始菜单并找到 ToolsTalk 2 文件夹。
选择 ToolsTalk 2 图标
启动该应用程序。
如果安装了 ToolsTalk 2 客户端应用程序或 ToolsTalk 2 服务器应用程序,则 ToolsTalk 2 Station Setup 应用程序无法执行。可以通过执行各自的安装程序轻松删除它们,并在 Program maintenance(程序维护)窗口中选择 Remove(删除)选项。
ToolsTalk 2 用户指南中的入门部分介绍了窗口和窗口导航。
如果没有控制器连接,ToolsTalk 2 Station Setup 应用程序的图形用户界面将略有不同。请参阅库  图标中的信息和配置手册中的控制器库
图标中的信息和配置手册中的控制器库  图标。
图标。
验证许可服务
此验证过程仅适用于客户端、服务器和 ClickOnce 应用程序安装,不适用于站点设置安装。
ToolsTalk 2 安装完成后,您将需要在启动时检查许可证服务是否准备就绪。
打开 Web 浏览器,浏览以下两个页面并完成步骤:
http://”ip-address:port"/api/1.0/health - 此页面的状态应为 “connectionCheck”:“Success”,否则,您将需要重新启动 Flexera 服务。在某些情况下,可能需要多次重启。
http://”ip-address:port"/api/1.0/hostids - 如果此页面为空,则需要重新启动Flexera服务。在某些情况下,可能需要多次重启。
此验证过程不适用于 Station Setup 安装
升级 ToolsTalk 2
在开始升级之前,请确保 ToolsTalk2 服务器正在运行。
从 ToolsTalk 22.12 或更早版本进行升级并且已经安装Atlas Copco Data Communication (ACDC) 时,请确保控制器端口指向安装 ACDC 的端口。如果您是首次安装ACDC,并且想要使用 ToolsTalk 2版本中当前控制器端口以外的其他端口,请按照以下过程中的说明更改控制器端口。
在配置文件中,控制器端口名为 HubPort。
在 ToolsTalk.Server.SelfHostService.exe.config(ClickOnce/Client/Server) 或 ToolsTalk.Standalone.exe.config(站点设置)中,将控制器端口更改为正确的端口号 <add key = HubPort value = XXXX
疑难解答
安装过程中的故障排除
升级 ToolsTalk 2 后重新启动 ToolsTalk Industrial Technique Host 服务。
错误 | 解决方案 |
|---|---|
错误代码 1920 无法启动验证您是否有正确的权限 | 数据库认证错误。对于 SQL 数据库,必须配置混合模式身份验证。 使用 SQL 管理工作室来更正身份验证。在进行另一次安装尝试之前,最有可能需要重新启动计算机。 |
使用安装文件时,InstallShield 向导会检测安装是否已经完成。如果计算机上存在较旧的安装,则可能无法检测到它们。
因此,建议在开始新安装之前删除程序和数据库目录的旧实例。
配置
在本部分,您可以找到有关如何创建、修改和验证产品设置的详细信息。
入门
启动
如果安装了 ToolsTalk 2 客户端,则可以启动应用程序:
选择 Windows 开始菜单,打开所有程序并向下滚动到 ToolsTalk 2。
打开文件夹,然后选择 ToolsTalk 2
启动应用程序。
用户界面开始视图
在成功启动 ToolsTalk 2 后,将显示下方的此视图,其中包含上述图标:

A | 左侧菜单栏 | C | 系统菜单栏 |
B | 工厂结构工作区 | D | 控制器工作区 |
控制器工作区显示不同的内容,取决于所选的图标或菜单。
启动默认图标时,选项为工厂结构图标  。这通过将图标颜色更改为浅蓝色来指出。工作区分为两个部分:
。这通过将图标颜色更改为浅蓝色来指出。工作区分为两个部分:
结构工作区用于管理控制器以及选择一个单独的控制器。
控制器工作区显示所有控制器图标,用于查看和设置所选控制器的所有参数和配置。
左侧菜单栏 | 功能 |
|---|---|
工厂结构 | 工厂结构图标 |
系统管理 | 系统管理图标 |
库 | 在库图标 |
系统菜单栏 | 功能 |
|---|---|
推送更改 | 推送图标 |
用户设置 | 用户设置图标 |
帮助 | 帮助 |
 。选择语言、扭矩单位和温度单位。
。选择语言、扭矩单位和温度单位。 图标显示
图标显示 如果没有控制器连接到 ToolsTalk 2,或者用户权限不允许访问文件夹或控制器,则工厂结构视图为空。
控制器
控制器类型
除了可以使用 ToolsTalk 2 支持和配置的控制器外,还可以在“控制器列表”中显示其他控制器类型以及有关这些控制器的一些有限信息。不可配置的控制器可以通过 ToolsTalk 2 启动相关的软件,在此可以对其进行进一步配置。
在所有控制器列表中,用图标表示不同的控制器类型。
控制器图标 | 控制器类型 | 兼容软件 |
|---|---|---|
| Power Focus 6000 | ToolsTalk 2 |
| PF6 Flex 系统 | ToolsTalk 2 |
| Power Focus 6000 StepSync | ToolsTalk 2 |
| Power Focus 4000 | ToolsTalkPF |
| Power Macs 4000 | ToolsTalkPM |
| 不支持的控制器 - 具有更高版本且与当前 ToolsTalk 2 版本不兼容的控制器 | 不适用 |
| IXB | ToolsTalk 2 |







控制器信息
以下是 Power Focus 4000 或 Power Macs 4000 控制器可以显示的信息示例。不支持的控制器将不会显示此信息。
应用程序启动软件版本
控制器序列号
协议版本
RBU 序列号
RBU 类型
软件版本
工具信息
以下信息显示在 ToolsTalk 2 的工具下。此处显示的内容在相应的控制器软件中进行了配置。
标识符
序列号
型号类型
保养日期
校准日期
拧紧计数
工具类型
自保养以来的拧紧
应用程序代码版本
引导代码版本
要接收工具信息,需要将控制器连接到 ACDC。有关更多信息,请参见 ToolsTalk 2 文档。
添加控制器
连接到 ToolsTalk 2 的控制器可在工厂结构
中可见。
如果没有控制器连接到 ToolsTalk 2,或者用户权限不允许访问文件夹或控制器,则工厂结构视图为空。
选择工厂结构然后右键点击控制器列表上部区域的任意位置。或者,选择系统管理,然后在控制器软件和数据管理选项卡中右键点击左侧菜单工作区。选择添加新控制器。连接控制器对话窗口将打开。
输入 IP 地址,或控制器的 DNS 名称。ToolsTalk 2 服务器的 IP 地址将预先生成。
显示控制器在线消息后,选择连接然后选择关闭。
连接状态
如果在连接控制器窗口中输入已连接控制器的 IP 地址,则会显示消息控制器已连接并在线。
建立连接时,显示消息正在等待控制器联机。
建立与控制器的连接后,将显示控制器在线消息。
消息 ToolsTalk 无法连接到控制器。如果连接失败,则会显示请验证 IP 地址/DNS 名称。
控制器也只能通过 web 图形用户界面或控制器图形用户界面连接到 ToolsTalk 2 应用程序。
此程序描述在控制器特定文档中。
管理控制器列表
工厂结构工作区 默认视图显示所有控制器。所有控制器视图包含当前连接到ToolsTalk 2 服务器的所有控制器,无论它们在线还是离线。自定义部分是录入文件夹的所有控制器的子部分。
选择自定义部分文件夹
在控制器列表顶部,点击选项按钮, 选择自定义部分,然后选择适当的文件夹。
选择自定义部分,然后选择适当的文件夹。
选择控制器
在左侧菜单栏中,选择工厂结构
。向下滚动到相关控制器,然后通过点击名称字段
 来选择它。
来选择它。 所选的控制器被突出显示。具有在线状态的控制器不断更新 ToolsTalk 2应用程序。
离线控制器名称被划掉。
如果通过除 ToolsTalk 2之外的另一个控制器界面进行了更改的话,离线状态的控制器可能会显示旧的和过时的信息。
几个ToolsTalk 2 用户可以访问同一个控制器。如果尝试选择已由另一个 ToolsTalk 2用户选择的控制器,将出现一个模态对话框,并显示以下警告消息:
其他用户当前在系统中激活。参数值可能会更改,恕不另行通知。
选择确定关闭对话框并继续。
搜索控制器
在工厂结构工作区中,有一个用于在控制器列表中搜索控制器的字段。
在搜索字段中,至少输入控制器名称的两个字母。
可以搜索控制器名称或类型。
远程控制器重新启动
在某些情况下,可能需要对控制器进行完整的上电复位 (POR)。
下面介绍了如何从 ToolsTalk 2进行远程 POR:
在左侧菜单栏中,选择工厂结构
。右键点击选定的控制器并选择快捷菜单中的重启
在模态窗口对话框中确认或取消控制器重启操作。控制器将在重新上线之前先离线。
此操作可能需要几分钟。
进行过程中,可在 ToolsTalk 2中执行其他任务。
只能在联机并连接到ToolsTalk 2应用程序服务器的控制器上进行远程重启。离线控制器名称被划掉。
保存参数和配置中的更改
当控制器的状态为在线时,如果在 web 图形用户界面或控制器图形用户界面中进行任何更改,它将自动更新 ToolsTalk 2 。
在 ToolsTalk 2 中进行的任何更改将会自动保存,但不会复制到控制器中。推送可将更改复制到控制器,并通过活动命令执行。
在工厂结构 工作区中的控制器名称旁边会显示一个推送指示符  ,表示已在 ToolsTalk 2 中进行了配置更改,但尚未复制到控制器中。
,表示已在 ToolsTalk 2 中进行了配置更改,但尚未复制到控制器中。
推送可通过几种方式进行:
选择控制器列表中的控制器名称旁的推送指示符图标
。点击系统菜单栏中的推送命令按钮
 开始将更改从 ToolsTalk 2 复制到一个或多个控制器。快捷菜单将打开用于选择受影响的控制器
开始将更改从 ToolsTalk 2 复制到一个或多个控制器。快捷菜单将打开用于选择受影响的控制器右键单击工厂结构
工作区中的控制器名称并选择快捷菜单中的推送命令按钮。更改从 ToolsTalk 2 复制到一个选定的控制器。
不能推送到状态为离线的控制器。
管理工作区窗口
工厂结构和报告工作区均涉及为进一步工作选择单个控制器。可以最小化或最大化工作区以增加控制器工作区的空间,方法是拖动,如下图所述和所示,或者选择工厂结构图标 。

最小化和最大化工作区视图
将光标放在两个工作区之间的线上。光标形状从白色箭头变为水平双面箭头的形状。
点击按住拖动,两个工作区之间的边界线可以移动。可以将窗口边界一直移到左侧菜单来最大化工作区,或者将窗口边界移到右侧菜单来最大化工作区。
过滤和排序数据网格
可以对工作区窗口中的数据网格列进行排序和过滤。
选择列标题以访问排序和过滤功能。
要对列表进行排序,请选择排序列表以将列表按升序、降序或默认顺序排列。
要过滤列表,请选中复选框以过滤要显示的内容。选择清除过滤器以返回默认视图。
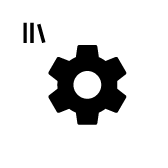
用户界面 - 带控制器概览的工作区
选择控制器并选择控制器菜单图标后,控制器工作区可以显示以下信息。
A | 工厂结构工作区中选定的控制器。 |
B | 控制器工作区中的控制器名称。该名称与工厂结构中所选的控制器名称一致 |
C | 所选控制器菜单图标的名称 |
D | 控制器工作区中的配置列表及概览信息 |
E | 控制器菜单图标 |
F | 控制器工作区中的一行命令按钮。命令按钮的类型因所选的控制器菜单图标而异 |
G | 所选的控制器菜单图标。以黄色边界高亮显示 |
工作区概览显示配置列表或显示带有参数值的菜单。如果显示了配置列表,则可以通过双击配置名称来访问下一级菜单级别。
使用硬件配置选项卡

在控制器模板库中进行硬件布局配置的离线编程。
配置区域
在配置区域中,您可以从头开始创建布局,也可以更新从控制器中提取的现有布局。
提取 | 根据连接到控制器的硬件更新硬件布局配置。 |
放大 | 放大布局。(Ctrl + 鼠标滚轮向前) |
缩小 | 缩小布局。(Ctrl + 鼠标滚轮向后) |
适合屏幕 | 将布局恢复为默认大小。 |
删除 | 删除所选项。 |
工具箱
工具箱包含控制器版本的所有有效产品。
创建硬件布局
全新安装的 PF6 系统没有任何硬件布局。
要创建硬件布局,始终从工具箱中的托架(3 插槽或 6 插槽)开始。对于通道编号的顺序,建议首先使用 6 插槽的托架。对于任何具有两个以上 FlexCarrier 的系统,请使用 6 插槽 FlexCarrier 启动硬件配置。
将 FlexCarrier 拖到拖到此处区域并放下。显示指标。你可以指向一个符号来获得工具提示。
将工具箱中的其他产品拖到目标位置。当用产品指向目标地点时,目标地点会改变颜色:
红色:无效拖放
蓝色:有效拖放
您可以将所有产品移动、复制和移除单个产品或运营商。
要移动,请点击并拖动产品。
如要复制,请按住 Ctrl 键并拖动产品。
要删除,请选择产品并按 删除。包含 FlexController 的 FlexCarrier 只能在剩下的一个载体上时被删除。
提取硬件布局配置
如果硬件布局配置为空,当前控制器设置可通过使用提取按钮提取。
选择提取,提取硬件配置对话框将打开。
选择确定以提取当前配置。
提取后,将更改推送到控制器,以便接收状态和运行状况。验证后硬件部署状态将会改变。
状态
当控制器连接并联机并且硬件布局配置与控制器同步时,ToolsTalk 2 将开始接收硬件部署状态变化的通知。一旦通知,ToolsTalk 2 将询问控制器硬件测量数据。
要查看详细的部署状态和测量数据:
在配置区域中选择产品。按Ctrl可以选择多个产品。
点击状态栏展开窗口。
提示:
通过拖动顶部边框可以增加面板的高度。
如要获取最新的测量数据,请点击刷新。
健康状态的详情可以扩展。选择仅显示异常以仅查看具有异常结果的数据。
工具配置
对于每个工具,都可以从包含所有可用工具配置的列表中选择工具配置。默认情况下,不进行工具配置的映射。可以运行未映射到工具配置的工具。在这种情况下,控制器将使用内部创建的默认工具配置,而不启用任何双传感器功能。
禁止模式
如果通道出现问题(驱动器或工具),可以将禁止模式设置为继续使用硬件:
False:通道运行正常。
报告 OK:通道已禁用,结果报告正常。
报告 NOK:通道被禁用并且结果报告 NOK。
报告没有结果:通道被禁用,不会显示在结果中。
托架
有两种类型的运营商:
3 槽
6 槽
您的配置中最多可以有 11 个运营商。带控制器的运营商始终是第一个运营商。所有的运营商需要在第一个运营商之后放弃。
控制器
控制器只能添加到第一个运营商的第一个插槽。无法将控制器产品添加到系统中的任何其他插槽。
驱动器
驱动器可以放置在除第一个托架的第一个插槽或通道编号为 65 的插槽之外的所有空闲插槽中。有关详细信息,请参阅通道编号部分。
您的配置中最多可以有 64 个驱动器。
空白
除了任何载体的第一个插槽之外,空白可以放置在所有空闲插槽中。
风扇
风扇产品只能放在托架的顶部。3 载体有一个风扇模块,6 载体有两个风扇模块。
E-Stop
有三种不同类型的 E-Stop:
E-Stop ASM
E-Stop 输入
E-Stop 绕过
前两个 E-stop 只能在配置的第一个载波中丢弃。所有其他运营商只能有一个E-Stop 绕过。
工具
Flex 系统只能添加 QST 工具。工具只能放在没有连接工具的驱动器上。
符号
符号表示每种产品的状态。您始终可以指向每个指标以获取工具提示。
| 警告 |
| 非预期 |
| 正常 |
| 空 |
| 类型错误 |
| 丟失 |






通道编号
当系统通电时,通道编号(又称驱动器索引)将被分配给每个 FlexDrive。驱动器索引取决于安装的是哪个 FlexCarrier,以及 FlexDrive 安装在 FlexCarrier 中的什么地方。
例如:通道编号
托架 1 | 插槽 1 | 插槽 2 | 插槽 3 | 插槽 4 | 插槽 5 | 插槽 6 |
控制器 | 驱动器 | 驱动器 | 驱动器 | 驱动器 | 驱动器 | |
驱动器索引 | - | 2 | 3 | 4 | 5 | 6 |
托架 2 | 插槽 1 | 插槽 2 | 插槽 3 |
|
|
|
驱动器 | 驱动器 | 驱动器 | ||||
驱动器索引 | 7 | 8 | 9 |
使用拧紧程序选项卡
在工厂结构工作区
中选择一个控制器。在工具栏上,选择拧紧程序
 。
。拧紧程序概述显示拧紧程序列表。
列表包含以下几列:
列 | 说明 |
|---|---|
复选框 | 勾选复选框选择拧紧程序。 |
名称 | 拧紧程序的名称。推送指示符 |
策略 | 为拧紧程序选定的拧紧策略。 |
库链接 | 指示程序是否链接到拧紧程序库中的全局拧紧程序。 |
目标 | 最终拧紧目标可表示为扭矩值或角度值。 |
最后更改 | 最后进行的更改,用 ToolsTalk 2 时间表示。 |
更改人 | 指出进行最后更改的是哪个用户。 |
控制器更新时间 | 推送到控制器的最后更改,用控制器时间表示。 |
控制器更新人 | 指出执行最后推送到控制器的是哪个用户。 |
批准状态 | 拧紧或拧松程序的批准状态 |
字段更改人可以是 ToolsTalk 2 注册用户,因为它是通过 ToolsTalk 2 图形用户界面完成的。
字段控制器更新人可以是 ToolsTalk 2 注册用户,通过 web 图形用户界面或通过控制器图形用户界面进行。
命令 | 说明 |
|---|---|
添加 | 创建新的拧紧程序。 |
添加至库 | 将本地拧紧程序转换为全局拧紧程序。 |
取消链接 | 将全局拧紧程序转换为本地拧紧程序。 |
比较 | 比较两个选定的拧紧程序。它们必须有相同的策略。 |
删除 | 从列表中删除所选的拧紧程序。 |
拧紧程序菜单

列中的每行代表一个多步骤拧紧程序。
标题 | 说明 |
|---|---|
复选框 | 用于选择特定的拧紧程序。 |
名称 | 用户定义的名称。 |
策略 | 为拧紧程序选定的策略。 |
库链接 | 链接到全局库 是/否。 |
目标 |
|
最后更改 | 以 ToolsTalk 2 时间表示的时间。 |
更改人 | 拧紧程序由 <user> 更改 |
控制器更新时间 | 控制器更新时间,以控制器时间表示。 |
控制器更新人 | 控制器由 <user> 更新 |
批准状态 | 拧紧或拧松程序的批准状态 |
命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
多步骤拧紧介绍
多步骤拧紧是分多步进行拧紧。步骤数和步骤类型因要进行的拧紧而异。
通常,多步骤拧紧可与许多工具并行运行,例如,拧紧将轮子固定在汽车上的五个螺栓。为确保拧紧顺利完成,所有工具必须同步运行,以便它们在大致相同的时间达到相同的扭矩。
为了确保同步发生,多步骤程序使用同步点。在同步点处,每个工具都停下来。当所有工具都达到同步点时,工具将继续下一步,直至达到下一个同步点。
同步点之间的步骤数是灵活的,可以在 1 到 10 之间变化。在不同工具上运行的多步骤程序不需要在同步点之间具有相同的步骤数。多步骤拧紧程序可高度配置,不同的多步骤程序的实际布局会有很大的不同。
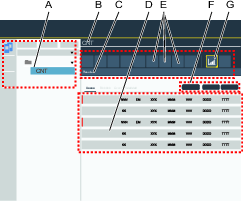
例如:多步骤拧紧程序

位置 |
|
A | 第 1 步和第 2 步准备螺栓上使用的工具。 |
B | 快速旋入在第 3 步进行。 |
C | 第 4 和第 5 步运行实际拧紧 |
D | 第 6 步用于从螺栓松开套筒。 |
限制
用于确保在出现意外情况时停止拧紧。例如,这些限制可测试确保未达到最大设定扭矩,或多步骤拧紧的部分不会花太长运行时间。每个步骤最多可各有 4 个限制。
监视器
用于验证是否根据规定进行拧紧。例如,它们可以为角度限值或扭矩限值。每个步骤最多可各有 4 个监视器。
使用同步模式
可以同时在不同的工具上运行不同的拧紧程序。同步模式的主要功能是定义同步拧紧中应包含的工具,并指定每个工具应运行的拧紧程序。
拒绝管理
如果拧紧程序出现问题,程序可能在进行修复或程序已终止。
拒绝管理是这样工作的:当所有工具都达到同步点时,每个工具的状态和总体状态将被评估。如果同步点的所有通道都 OK,程序将继续下一步。如果有通道是 NOK 的,程序将根据设置操作进行修复或终止。
添加多步骤程序
选择添加按钮。创建新的拧紧程序对话窗口将打开。
输入拧紧程序名称、索引号(仅对拧紧有效)并选择拧紧策略多步骤。如果没有主动选择索引,将为拧紧程序分配程序列表中的下一个序列号。
选择添加按钮。
复制和粘贴拧紧程序
现有的拧紧程序可以复制为模板,然后粘贴到另一个控制器上。
复制和粘贴只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
在工厂结构
区,选择一个控制器。转到拧紧程序
。工作区显示所有可用的拧紧程序。
右键点击要复制的一行,或者,若要复制多行的话,选中要复制的每个程序上的复选框
 ,然后点击右键。
,然后点击右键。选择复制。
右键点击空工作区区域中的任意位置,然后选择粘贴以将拧紧程序添加到列表中的第一个可用位置。或者,右键点击并选择粘贴索引以选择程序列表中的位置。双击打开拧紧程序并进行修改。
也可以将拧紧程序模板粘贴到程序模板库工作区中。
导入多步骤程序
选择添加按钮。创建新的拧紧程序对话窗口将打开。
选择导入选项卡。
选择打开文件,然后从所需位置选择文件。文件格式必须为 <template_name>.json。选择打开。
删除多步骤程序
对于要删除的每个多步骤程序,在工作区的最左列中,选中相应的复选框。
选择管理命令按钮,然后从下列列表中选择删除。
选定的多步骤程序被移除,列表更新。
比较多步骤拧紧程序
在拧紧程序中,可以比较两个不同的多步骤程序。
转到拧紧程序选项卡
,在程序列表中选择要比较的拧紧程序的相应复选框。只能比较具有相同操作模式的多步骤程序,拧紧与拧紧相比,拧松与拧松相比。
选择管理命令按钮然后选择比较。
工作区显示实际多步骤程序步骤的图形图像,在比较区域中,显示两个选定拧紧程序的参数。
在比较窗口中,不同的特定参数值将以红色显示。选中仅显示差异复选框以仅显示不同的参数值。包含不同参数的“属性”和“步骤”部分将以蓝色指示符标记。
无法编辑正在比较的两个多步骤程序,并且不会显示配置错误或警告。
全局拧紧程序
拧紧程序可以是本地的或全局的。如果拧紧程序是全局的,则在拧紧程序列表的库链接列中显示是。
本地拧紧程序对单个控制器有效。
在工厂结构工作区
中选择一个控制器。在工具栏上,选择拧紧程序
。拧紧程序概述显示拧紧程序列表。
本地拧紧程序只可通过拧紧程序 选项卡编辑。
本地拧紧程序在拧紧程序库  中不可见。
中不可见。
全局拧紧程序对于订阅拧紧程序的多个控制器有效。全局拧紧程序被放在拧紧程序库中。
选择左侧菜单栏中的库
。 选择顶部菜单栏中的拧紧程序库
。 拧紧程序库显示全局拧紧程序列表。
如果控制器订阅全局拧紧程序,它将在拧紧程序 中可见,但禁止编辑。
全局拧紧程序只可通过拧紧程序库 编辑。
拧紧编辑器
按钮
名称 | 说明 |
|---|---|
Display |
|
放大 | 在拧紧程序上放大。 |
缩小 | 从拧紧程序上缩小。 |
适合屏幕 | 使整个拧紧程序适合拖放区域。 |
删除 | 删除所选项。 |
修复区
如果同步点的状态为异常,则修复区中的步骤将显示要遵循的修复路径。
修复路径总是在同步点开始和结束。修复路径应重新进入拧紧路径的位置是灵活的,但修复路径必须始终回到程序的开始处。
每个同步点只能启动一个修复路径,但是多个修复路径可能会在同一个同步点处结束。
在修复路径中运行的步骤数可介于 1 到 3 之间。
无法从程序开始处定义修复路径。
例如:修复路径
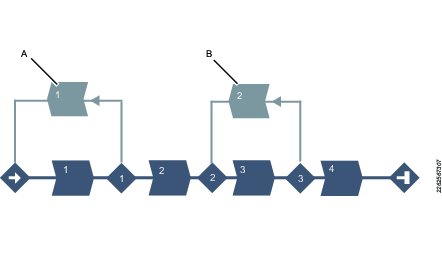
A | 修复从第一个同步点到程序开始处的路径。 |
B | 修复从第三个同步点到第二个同步点的路径。 |
拧紧区
拧紧区包括拧紧路径,即,多步骤拧紧程序中的步骤和同步点,不包括修复和终止路径。
终止区
如果同步点的状态至关重要,则终止区中的步骤将显示要遵循的终止路径。终止路径完成后,拧紧结束。终止路径总是在同步点开始。每个同步点只能启动一个终止路径。
在终止路径中运行的步骤数可介于 1 到 3 之间。
始终可以从所有同步点终止。如果没有定义终止路径,程序将直接转到最后,而不运行任何其他步骤。
例如:终止路径
A | 终止从第一个同步点到程序结束处的路径。 |
B | 终止从第三个同步点到程序结束处的路径。 |
配置
选择步骤、限制或监控器,然后点击屏幕底部的配置以打开配置字段。如要选择多个步骤,可使用 Ctrl 键。
配置字段包含步骤、监视器和限制的不同参数,具体取决于在修复区域中选择的步骤、监视器或限制。
输入所需的参数。
如要删除一个监控器或限制,请选择该字段中的删除。
使用变速
您可以在速度将发生变化的步骤中定义 1-5 个角度触发器或扭矩触发器。
可以在配置字段中添加变速。
在一个步骤内,所有变速触发器都是基于同一个属性,即扭矩或角度。它们不能在一个步骤内混合。
添加变速:
在可能有变速的步骤的对话框中,单击添加变速并选择一个角度范围或扭矩范围。变速角度/扭矩字段打开。
根据下表添加值。
参数 | 说明 |
|---|---|
角度/扭矩触发器 | 必须 > 0。 |
速度 | 必须 > 0。 |
速度上升类型 | 硬或软。 |
扭矩触发器和角度触发器必须小于步骤目标,具体取决于步骤类型和触发器类型。
扭矩触发器和扭矩速度也会针对 工具的最大扭矩和最大速度进行验证。只要变速设置超出工具最大值或步骤最大值就会出现警告或错误指示。
拧紧程序出现警告可以将设置推送至控制器,但是拧紧程序出现错误指示时不能推送。
工具箱
工具框包括:
拖放区快捷键
快捷键 | 说明 |
|---|---|
空格键 + 光标 | 移动拖放区。 |
拖放区功能
功能 | 说明 | |
|---|---|---|
|
|
|
添加步骤 |  | 在工具箱中获取一个步骤。将步骤拖到想要的位置。可能的位置通过一个浅蓝色指示箭头指出。 |
___________ | __________________________ | _________________ |
选中步骤 |  | 单击一个步骤以标记它。 |
___________ | __________________________ | _________________ |
移动步骤 |  | 如要移动步骤,点击步骤并按住按钮,同时移动它。 |
___________ | __________________________ | _________________ |
复制步骤 |  | 如要复制步骤,单击 Ctrl 按钮然后拖放该步骤。 |
___________ | __________________________ | _________________ |
添加修复路径 |  | 将步骤放在修复部件开始的同步点的上方。 |
___________ | __________________________ | _________________ |
添加修复步骤 |  OR(或) 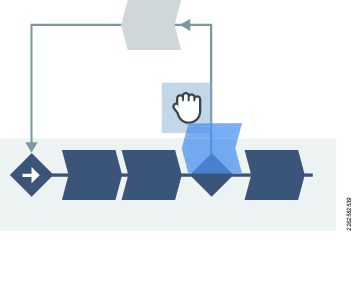 | 将步骤放在修复区以添加修复步骤。可能的位置通过一个浅蓝色指示箭头指出。 或者 将步骤放在修复部件开始的同步点上方。然后将该步骤放置在修复路径的第一步之前。 |
___________ | __________________________ | _________________ |
添加终止路径 |  | 将步骤放在终止部件开始的同步点下方。 |
___________ | __________________________ | _________________ |
添加终止步骤 |  OR(或)  | 将步骤放在终止区以添加终止步骤。可能的位置通过一个浅蓝色指示箭头指出。 或者 将步骤放在终止部件开始的同步点下方。然后将该步骤放置在终止路径的第一步之前。 |
___________ | __________________________ | _________________ |
移动修复路径的终点。 | 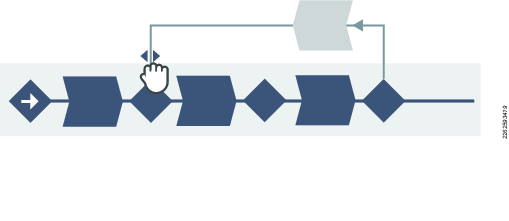 | 单击小箭头移动修复路径的终点。 |
___________ | __________________________ | _________________ |
添加限制和监控器 | 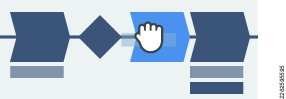 | 在工具箱中获取一个限制或监控器。将限制或监控器拖到想要的步骤。添加限制或监控器的可能步骤,通过更改为较浅的蓝色表示。 |
___________ | __________________________ | _________________ |
禁止位置 | 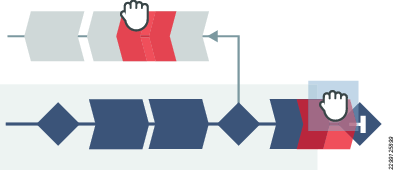 | 红色箭头表示不能放置一个步骤。 |
|
|
拧紧步骤
拧紧/松开至角度 (A)
A – 拧紧至角度
该步骤运行工具直至达到目标角度。目标角度从步骤开始时测量。
A – 拧松至角度
该步骤以速度 n 反向运行工具,直至达到目标角度。目标角度从步骤开始时测量。
参数
参数 | 说明 |
|---|---|
目标角度 | 角度目标。必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
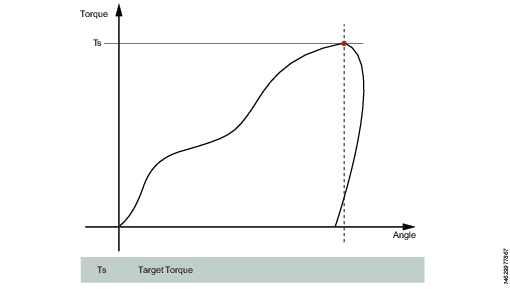
T - 拧紧/拧松至扭矩
T - 拧紧至扭矩
此步骤以编程的速度正向运行工具直至达到目标扭矩。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
T - 拧松至扭矩
该步骤以速度反向运行工具。如要激活步骤,扭矩必须先超过目标扭矩的 110%。目标扭矩应设为正值。达到目标扭矩后,该步骤将运行直至扭矩降至目标扭矩以下。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
在第一个扭矩处停止 | 该步骤运行到扭矩超过目标扭矩。目标扭矩应设为正值。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
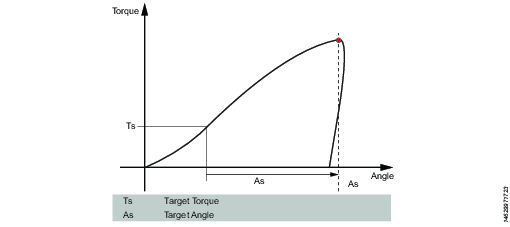
T+A – 拧紧至扭矩 + 角度
该步骤运行工具直至达到目标扭矩。它将从这一点继续运行一个附加的目标角度。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
目标角度 | 角度目标。必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
DI – 运行至数字输入为止
此步骤将按照参数方向定义的方向运行工具,直到数字输入指定的输入根据停止条件的值变高或变低。
参数 | 说明 |
|---|---|
方向 | 前进或后退 |
数字输入 | 可以选择以下控制器上的本地数字输入之一:
|
停止条件 |
|
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度 (rpm) | 默认:60 rpm。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则可用。默认:500 rpm/s。 |
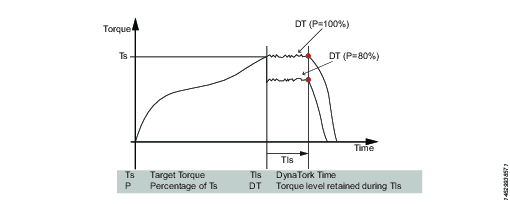
拧紧至 DynaTork (DT)
此步骤以速度 n 正向运行工具,直至达到目标扭矩。然后,工具将在 DynaTork 时间期间以目标扭矩的 DynaTork 百分比保持电流恒定。
为避免工具过热,强烈建议不要运行 DynaTork 超过工具最大扭矩的 40%。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
DynaTork 时间 | DynaTork 时间将激活。 |
DynaTork 百分比 | 目标扭矩的百分比。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 (rpm) | 默认:60 rpm。 |
等待 (W)
在这一步中,工具等待指定的时间量。等待时,工具不旋转。
等待步骤之前的步骤必须将制动设置为开,即等待步骤必须在工具静止状态下开始。
参数 | 说明 |
|---|---|
等待时间 | 工具将静止的秒数。 |
保持位置 | 开启或关闭。 如果开启,在时间目标期间,工具位置将保持不动。 |
松开套筒 (SR)
该步骤以速度 n 反向运行工具,直至达到目标角度。目标角度从步骤开始时测量。
该步骤只能作为多步骤拧紧程序的拧紧路径中的最后一步。但是,可以在此步骤后添加同步点。
参数 | 说明 |
|---|---|
目标角度 | 角度目标。 默认:3º,必须 > 0 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
拧紧至扭矩或角度 (T|A)
此步骤以速度 n 向前运行工具,直至达到第一个扭矩目标或角度目标。扭矩和角度测量从步骤开始处开始。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 必须 > 0。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
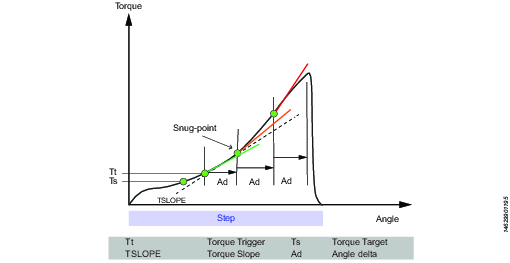
旋入 (RD)
此步骤以该速度正向运行工具,根据旋入类型、扭矩或贴合,步骤行为如下:
旋入类型:至扭矩:当找到指定目标扭矩时,步骤停止。
旋入类型:至贴合:贴合变化率计算在指定扭矩触发水平 Tt 处开始。如果没有设置扭矩触发器,在步骤开始处开始变化率计算。
斜率计算是在相隔 Ad 度的两个角度点之间进行的,计算公式如下:(Tn – Tn-1) / (An – An-1),一旦彼此之间的两个斜率大于 TSLOPE,就会找到贴合点。
参数 | 说明 |
|---|---|
旋入类型 | 至扭矩或至贴合。 |
目标扭矩 | 默认:“未设置”。必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
触发器扭矩 | 如果旋入类型为至贴合,则显示触发器扭矩字段。 默认:“未设置”。必须 > 0。 |
Delta 角度 | 如果旋入类型为至贴合,则显示角度增量字段。 默认:"0"。必须 > 0。 |
扭矩率 | 如果旋入类型为至贴合,则显示扭矩率字段。 默认:"0"。必须 > 0。 |
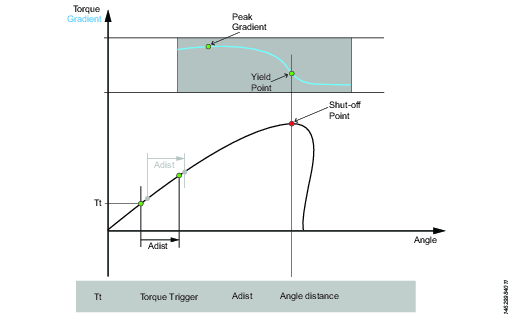
Y – 拧紧至屈服度
该策略正向运行工具直至检测到屈服点为止。通过从扭矩超过触发扭矩水平时监控扭矩变化率来找到屈服点,触发扭矩水平根据扭矩和角度距离测量求出。角度距离参数根据指定连接硬度设置。
设置变化率角度窗口(用于硬连接、软连接或角度窗口的手动设置)。如果选择了手动,必须设置角度窗口。如果螺钉被拧紧至满扭矩,以及当它被拧紧至贴合点后旋转 30 度(或更小)时,连接将被视为硬连接。软连接是指拧紧至贴合点后旋转 720 度或更大角度。硬度参数定义变化率计算的角度窗口。连接越硬,角度窗口越小。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
触发器扭矩 | 角度测量在该触发器处开始。必须 > = 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
屈服点百分比 | 必须 >= 20 % |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
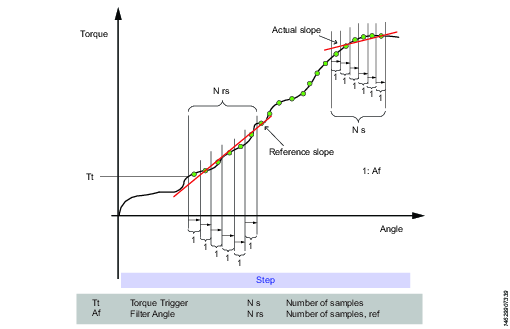
拧紧至屈服,方法 2 (YM2)
此步骤以指定速度正向运行工具直至检测到屈服点为止。
当扭矩达到 Tt 时开始搜索屈服点。计算超过 Af 度的扭矩平均值。重复此过程 N rs 次。
依据 N rs 点使用线性回归方程计算参考斜率。然后,依据 A f 度连续计算新的平均值。
依据最后的 N s 平均点使用线性回归方程计算实际斜率。当斜率小于参考斜率的 Py % 时,达到屈服点。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
过滤角度 | 默认:1.必须 > 0。 |
样本数量 | 默认:6.必须 >= 4。 |
样本数量,参考 | 默认:6.必须 >= 4。 |
屈服点百分比 | 默认:90%。必须 >20%。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
TC – 扭矩校准
该步骤以指定速度正向运行工具直至达到目标扭矩。
将其设为“主传感器”或“次级传感器”可以校准两个传感器的其中一个。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
传感器 | 主传感器或次级传感器。默认:主传感器。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
接合 (E)
该步骤以两个方向运行工具,直到套筒与螺钉啮合为止。假如如果不啮合则继续被设为是的话,继续该步骤直至达到目标扭矩或目标角度。如果在任意方向达到目标角度,方向被反转。通过输入最大啮合尝试次数限制搜索迭代。如果在任意方向达到目标扭矩,步骤将以 OK 状态完成。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 默认:0.必须 > 0。 |
最大接合尝试次数 | 默认:2.必须 > 0。 |
如未接合,请继续 | 如果是,即使接合尝试失败,步骤也将以 OK 状态结束。 如果否,若接合尝试失败,则步骤将以 NOK 状态结束。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
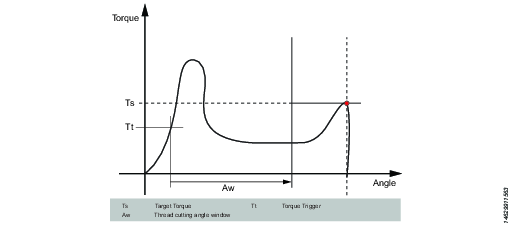
切割螺纹以达到目标扭矩 (ThCT)
切割螺纹以达到目标扭矩功能可在所需的旋入扭矩大于旋入完成扭矩时启用拧紧,例如,当使用自攻螺纹(或自攻)螺钉拧紧金属薄层时。工具正向运行直至达到螺纹切割角度 (Aw)。当扭矩第一次超过螺纹切割触发扭矩 (Ttc) 时测量螺纹切割角度窗口。步骤从达到螺纹切割角度的点继续运行,直至达到目标扭矩 (Tt)。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
螺纹切割角度窗口 | 默认:0.必须 > 0。 |
触发器扭矩 | 角度测量在该触发器处开始。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
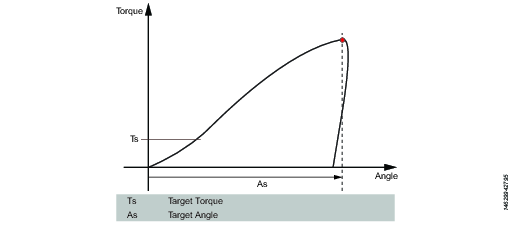
拧紧达到目标扭矩和角度 (T&A)
以指定速度正向运行工具直至达到目标扭矩和目标角度。目标扭矩和目标角度必须设为 > 0。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 默认:0.必须 > 0。 |
制动器 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
同步点
在同步点中,工具等待所有其他工具在其程序中到达相应的同步点。根据所有工具的状态,程序在拧紧路径、修复路径或终止路径上继续。
为防止在同步点等待的工具过热,只允许“保持扭矩”或“保持位置”最多 1 秒钟。之后,工具将释放保持并继续等待其他工具。
参数 | 说明 |
|---|---|
同步保持条件 |
|
在一个多步骤拧紧程序中,双击同步点或者选中它,然后选择工作区的下方区域中的配置。如要选中多个,请按 CTRL 键。
在配置区域,为每个同步点选择以下条件中的其中一个:
不保持。电机关闭,位置不会被保持。
保持位置。工具保持上一步结束时的位置。
实用程序
可以添加连接器以重用修复路径或终止路径。
选择连接器。
选择一个同步点。
如果选择了错误的同步点,请使用鼠标右键或按 Esc 取消。
选择修复路径或终止路径上的步骤。
您只能选择修复路径后退或终止路径前进。
连接器已添加。
一个同步点只能有一个修复路径和一个终止路径。
例如:相同的修复路径

A | 与第二个同步点中的步骤 5 相同的修复路径。 |
B | 与第三个同步点中的步骤 5 相同的修复路径。 |
例如:相同的终止路径

A | 与第一个同步点中的步骤 5 相同的终止路径。 |
B | 与第二个同步点中的步骤 5 相同的终止路径。 |
步骤监控器
步骤监控器用于验证是否根据规范进行拧紧,比如角度限值或扭矩。监控器是灵活的,可按需要放在多步骤程序中。
多步骤拧紧程序中的每一步可以有最多四个监控器。
A – 角度
在该步骤,监控器测量监控期间达到的最大角度,并检查它是否介于上限和下限之间。角度测量在监控开始处开始,如果指定的话,则在扭矩第一次在监控期间超过触发扭矩的点处开始。
参数 | 说明 |
|---|---|
类型 | 共有四种角度类型:峰值角度(默认)、峰值扭矩处的角度、切断角度和结束角度。 |
触发器扭矩 | 角度测量在该触发器处开始。 |
下限 | 可接收的最小角度。 |
上限 | 可接收的最大角度。 |
YA – 屈服角度
此监控器从屈服点测量达到的峰值角度并检查峰值角度是否处于限值内。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
屈服点百分比 | 必须 >= 20 % |
触发器扭矩 | 角度测量在该触发器处开始。必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
下限 | 可接收的最小角度。必须 >= 0 |
上限 | 可接收的最大角度。必须 > 0 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|

MT – 平均扭矩
该监视器在监视期间测量平均扭矩,并检查计算值是否在限值范围内。
参数 | 说明 |
|---|---|
类型 | 指定开始条件:
|
扭矩触发器 | 当类型设置为触发扭矩、角度触发或角度窗口时可用。必须 >= 0 且 < 工具最大扭矩。 |
角度触发器 | 当类型设置为角度触发或角度窗口时可用。必须 > 0。 |
角度窗口 | 当类型设置为角度窗口时可用。必须 > 0。
|
时间间隔 | 当类型设置为时间间隔时可用。必须 > 0。 |
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
PT – 峰值扭矩
在该步骤,监控器测量监控期间达到的最大扭矩,包括任何过冲,并检查它是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
PTCA – 后螺纹切割角度
测量监控期间达到的角度并检查其是否介于指定角度限值之间。在达到螺纹切割角度窗口结束处之前,触发扭矩水平被忽略。然后,一旦测量扭矩超出触发扭矩,角度测量就会开始。参数停止条件规定角度测量应在哪里结束。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
螺纹切割角度窗口 | 必须 > 0 |
角度测量类型 | 峰值角度 达到峰值扭矩时的角度 关闭角度 结束时角度 |
螺纹切割触发扭矩 | 必须 >= 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
PTCPT – 后螺纹切割峰值扭矩
测量监控期间达到的最大扭矩,包括任何过冲,并检查其是否介于扭矩限值之间。在达到螺纹切割角度窗口结束处之前,所有扭矩值被忽略。
参数 | 说明 |
|---|---|
螺纹切割触发扭矩 | 必须 >= 0 |
螺纹切割角度窗口 | 必须 > 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
PVTH – 后视图扭矩高
此监控器检查角度窗口中的所有扭矩值是否低于限值。
参数 | 说明 |
|---|---|
开始角度 | 必须 >= 0 |
窗口长度 | 必须 <= 0 |
样本数量 | 1 |
上限 | 可接收的最大扭矩。 |
PVTL – 后视图扭矩低
此监控器检查角度窗口中的所有扭矩值是否高于限值。
参数 | 说明 |
|---|---|
开始角度 | 必须 >= 0 |
窗口长度 | 必须 <= 0 |
样本数量 | 1 |
下限 | 最低可接受的扭矩。 |
PrT – 有效扭矩
此监控器计算角度窗口中的有效扭矩值并检查它是否处于限值内。
参数 | 说明 |
|---|---|
扭矩补偿 | 开启或关闭。 |
开始角度 | 必须 > 0 |
窗口长度 | 必须 >= 0 |
下限 | 必须 > 0 |
上限 | 必须 >= 0 |
SOT – 切断扭矩
切断点是指步骤达到其目标的点。在切断点处测量扭矩,并检查其是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
SOC – 切断电流
切断点是指步骤达到其目标的点。在切断点处测量电流,并检查其是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 可接收的最小电流。 |
上限 | 可接收的最大电流。 |
SSD – 杆件滑动检测
在该步骤,监控器检测并报告步骤中的杆件滑动影响。通过计算扭矩低于触发级别的次数来完成检测。如果次数大于最大振动次数,则报告粘滑错误。监控器以两种不同的模式操作:动态或固定。两种模式之间的差异是计算触发器水平的方式。
参数 | 说明 |
|---|---|
杆件滑动检测类型 | 指定将在监视器杆件滑动检测中执行哪种类型的杆件滑动检测。默认:动态扭矩。 |
峰值扭矩百分比 | 默认:80%,必须 > = 10 且 <100。 |
触发器扭矩 | 默认:5,必须 > = 0 且 < 工具最大扭矩。 |
最大振动次数 | 默认:5,该值必须 >=3 且 <=20。 |
Ti – 时间
测量监控期间的实耗时间并检查其是否介于时间限值之间。时间测量在监控开始处开始,如果触发扭矩被指定,则在扭矩第一次在监控期间超过触发扭矩的点处开始。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 > = 0 且 < 工具最大扭矩。 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
TC – 扭矩校准
本监控器检查达到的最大扭矩是否处于扭矩限值内。
参数 | 说明 |
|---|---|
传感器类型 | 主传感器或次级传感器 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
TG – 扭矩变化率
此监视器检查变化率是否在限值范围内。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
结束点检查 | 如果设置为是,则仅检查在该步骤的截止点测得的变化率是否在限值范围内。 |
触发器扭矩 | 角度测量在该触发器处开始。必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
下限 | 最低可接受的扭矩变化率。必须 >= -100。 |
上限 | 最高可接受的扭矩变化率。必须 > -100 且 > 下限。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
角度偏置 | 当结束点检查设置为否时可用。指定首次通过触发扭矩后开始计算变化率的度数。 |
TAW – 角度窗口的扭矩
此监控器检查角度窗口中的所有扭矩值是否处于扭矩限值内。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
开始角度 | 必须 > 0 |
窗口长度 | 必须 <= 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
如果通过窗口则为 NOK | 如果设置为是,则当未到达角度窗口的终点时,此监视器的状态为 NOK。 |
TRD – 扭矩率和偏差
在该步骤,监控器测量并检查扭矩率,也就是扭矩与角度的比率。检查计算得到的扭矩率是否介于上限和下限定义的扭矩率限值内。
参数 | 说明 |
|---|---|
触发器扭矩 | 角度起始点扭矩。 |
起始点角度 | 当从触发器扭矩测量起始点角度时,扭矩测量开始。 |
结束点角度 | 扭矩测量停止处的角度点。 |
结束点扭矩 | 扭矩测量停止处的扭矩。 |
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
限值 | 必须 > 0 |
步骤限制
为确保在发生非预期事件时停止拧紧,可为多步骤拧紧程序添加限制。对于每个限制,选择可修复 =是以允许在拧紧停止时重试。多步骤程序中的每一步可以有最多四个限制。
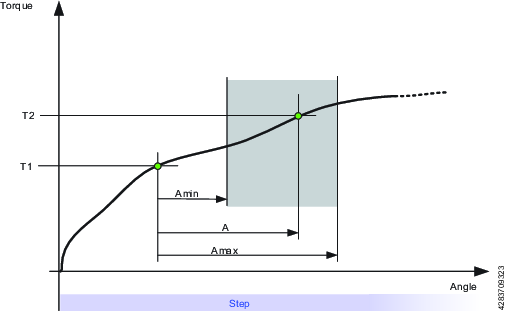
CTh – 跨线程
该限制从扭矩超过开始扭矩 (T1) 的点到扭矩超过结束扭矩 (T2) 的点检查角度。如果从开始扭矩 (T1) 处测得的角度高于最大限值 (Amax),工具将立即停止,程序跳到下一个同步点。
当扭矩超过结束扭矩 (T2) 时,测得的角度对照最小限值 (Amin) 检查。如果角度小于该限值,工具立即停止,程序跳到下一个同步点。
参数 | 说明 | 图中 |
|---|---|---|
开始扭矩 | 必须 <=0。 | T1 |
结束扭矩 | 必须 <=0。 | T2 |
最小限值 | 角度下限。 | Amin |
最大限值 | 角度上限。 | Amax |
A – 最大角度
该限制进行角度测量。如果测得的角度达到最大限值,工具立即停止,程序跳到下一个同步点。角度从限制的开始处测量,或者(如果指定的话)从扭矩在该限制期间第一次超过触发扭矩的点处测量。
参数 | 说明 |
|---|---|
触发器扭矩 | 如果指定,这是开始测量角度处的扭矩。 |
最大限值 | 如果达到该限值,工具立即停止,程序跳到下一个同步点。 |
T – 最大扭矩
该限制检查扭矩。如果测得的扭矩超出最大限值,工具立即停止,程序跳到下一个同步点。
参数 | 说明 |
|---|---|
最大限值 | 如果扭矩达到该指定限值,工具立即停止,程序跳到下一个同步点 |
Rh - 重复拧紧
该限制检查扭矩。如果测得的扭矩超出扭矩限值,工具立即停止,程序跳到下一个同步点或程序的结束处。
参数 | 说明 |
|---|---|
扭矩限值 | 如果扭矩达到此规定限值,工具立即停止,程序跳到下一个同步点或程序的结束处。 |
RT – 取消扭矩
该限制检查扭矩。如果测得的扭矩低于扭矩下限,工具立即停止,程序跳到下一个同步点或程序的结束处。
参数 | 说明 |
|---|---|
取消扭矩限值 | 默认:10 Nm。必须 > 0。 |
TG – 扭矩变化率
该限制检查变化率,如果它超出限值,工具立即停止,程序跳到下一个同步点或程序的结束处。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
触发器扭矩 | 必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
最小限值 | 必须 >= -100。 |
最大限值 | 必须 > -100 且 > 下限。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|

TAW – 角度窗口的扭矩
该限制检查角度窗口中的测得扭矩是否处于限值内。如果测得的扭矩超出限值,工具立即停止,程序跳到下一个同步点或程序的结束处。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
开始角度 | 必须 >= 0 |
窗口长度 | 必须 > 0 |
最小限值 | 必须 >= 0 |
最大限值 | 必须 <= 最小限值 |
TCD – 扭矩与电流偏差
该限制验证转化为对应扭矩的所有当前测量是否不超过使用扭矩传感器测得的实际扭矩的最大偏差。当扭矩在该步骤期间第一次达到触发扭矩并被激活直至步骤达到其目标时,限制开始。
如果触发扭矩从未达到,监控器将报告 OK。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
最大偏差 | 默认:1,必须 > 0 |
结果报告器
结果报告器使从结果中提取选定产生器的特定值成为可能。结果报告器属于一个步骤,但必须与它们从中读取值的监视器/限制相关联。只能选择与结果报告器位于同一步骤中的监视器或限制。将结果报告器添加到使用拖放的步骤中(与监视器和限制相同)。每个结果报告器负责报告特定的结果值,例如,旋入角、最终扭矩、有效扭矩。
可以将结果报告器绑定到:
程序监视器
步骤监视器
步骤限制
每个结果报告器都定义一个最终值类型:
FA – 最终角度
FC – 最终电流
FT – 最终扭矩
PT – 有效扭矩
RA – 旋入角度
ST – 自攻扭矩
常规参数
参数 | 说明 |
|---|---|
产生器 | 指定哪个监视器/限制产生该值。 |
值 | 指定要从选定的产生器显示的值。 |
限制:
只能在属于主路径步骤的监视器/限制或程序监视器/程序限制中添加结果报告器。
如果它们的类型不同,则可能存在多个报告器。
可能在每个步骤上都存在例如类型的最终角度和程序监视角度的结果报告器。
对于那些具有多个结果值的监视器/限制,如果结果报告器的类型不同,则可以添加多个结果报告器。
在步骤或程序监视器/限制上可能没有几个相同类型的结果报告器。
对于每种可能的最终值类型,仅报告一个结果。
规则:
结果项目的内部编号必须与相应结果报告器的内部编号相同。
监视/限制结果的内部编号必须与配置中的监视/限制的内部编号相同。
步骤结果必须根据执行顺序进行排序。必须首先执行第一步。
结果报告器报告的可能值(如果存在于监视器/限制/步骤中):
监视/限制测量值(浮点数或整数)
监视/限制上下限值
状态
扭矩触发器和角度触发器
角度目标和扭矩目标(从步骤中读取)
状态的可能值:
低
正常
高
其他
未设置
目标值不属于任何步骤监视器,因此目标值取自监视器所属的步骤。
多步骤模板
创建多步程序时,所有创建的模板都在“模板”选项卡中可见。可以插入(拖放)模板并将其作为构建新的多步骤程序的基础。
当尚未添加步骤时,只可通过拖放的方式来将模板添加到多步骤程序中。在将模板拖到多步骤程序之后,才可以添加步骤。
修改多步骤拧紧程序时,模板本身不会受到影响,因为模板是被复制(而不是链接)到程序中。
在库 > 程序模板中创建多步骤程序模板。
多步骤拧紧程序属性
参数 | 说明 |
|---|---|
名称 | 用户定义的多步骤程序名称。 |
说明 | 多步骤程序的说明。 |
类型 | 设置拧紧类型,比如固定。 |
螺纹方向 | 顺时针 (CW) 或逆时针 (CCW)。通常该方向为顺时针。 |
程序限制
参数 | 说明 |
|---|---|
最大时间限值 | 设定秒数。该限制检查拧紧的总时间,如果它超过最大时间限值,工具将立即停止。时间从程序开始时测量。 |
最大扭矩限值 | 设定数量。该限制检查扭矩,如果测得的扭矩超过最大扭矩限值,工具立即停止。 |
程序监控器
参数 | 说明 |
|---|---|
角度 | 为整个程序打开或关闭角度监控。如果按步骤启用和触发器扭矩空白,角度监控将在程序开始时启动。 |
按步骤启用 | 设置角度监控生效的一系列步骤。如果没有指定最终步骤,角度监控将在并非套筒释放步骤的程序最终步骤停止。 |
类型 | 角度监控类型:
|
触发器扭矩 | 设置触发器扭矩值用于角度监控。 |
下限 | 设置角度监控(程序)下限。 |
上限 | 设置角度监控(程序)上限。 |
参数 | 说明 |
|---|---|
扭矩 | 为整个程序打开或关闭扭矩监控。如果将按步骤启用留为空白,则扭矩监控将在程序开始时启动。 |
按步骤启用 | 设置扭矩监控生效的一系列步骤。如果没有指定最终步骤,扭矩监控将在并非套筒释放步骤的程序最终步骤停止。 |
类型 | 角度监控类型:
|
下限 | 设置扭矩监控(程序)下限。 |
上限 | 设置扭矩监控(程序)上限。 |
验证
参数 | 说明 |
|---|---|
验证工具值 | 如果工具已知,使用开启,并设置最大扭矩和最大速度。 如果工具未知,使用关闭。 |
工具 | 往下拉以选择要验证的工具。 |
最大扭矩 | 要验证的工具最大扭矩。 |
最大速度 | 要验证的工具最大速度。 |
附件调校
参数 | 说明 |
|---|---|
使用附件调校 | 选择附件调校是开启还是关闭。 |
齿轮比 | 传动比值可介于 0.5 与 4.0 之间。 |
效率优化 | 效率调校值可介于 0.5 与 1.0 之间。 |
报告器
这使用户可以选择哪些值(来自监控器/限制)应显示为最终值。点击添加以选择要与程序监视器/限制值绑定的结果报告器。
参数 | 说明 |
|---|---|
报告器 | 选择结果报告器。 |
产生器 | 选择哪个监视器/限制产生了该值。 |
值 | 选择要从选定的产生器显示的值。 |
使用同步模式选项卡
同步模式用于:
定义同步拧紧或拧松中应包括的工具
指定每个工具应运行的拧紧或拧松程序
处理拒绝管理(仅对拧紧同步模式有效)
同步模式允许固定解决方案中的不同工具同时运行不同的多步骤程序。
在灵活的生产线中,您可能需要为每个新产品使用不同的同步模式。同步模式功能允许您为每个配置设置模式。
每行表示一个同步模式。各列包含下列信息:
列 | 说明 |
|---|---|
复选框 | 比如在删除同步模式时使用。 |
名称 | 对于拧紧同步模式,每个名称都以索引号开头,然后是用户定义的名称。拧松同步模式仅包含用户定义的名称。 |
通道 | 同步模式中的通道数。 |
最后一次保存 | 最后进行的更改,用 ToolsTalk 2 时间表示。 |
最后一次保存者 | 显示谁保存了配置数据。 |
控制器更新时间 | 控制器更新时的时间,以控制器时间表示。 |
控制器更新人 | 最后更新控制器的用户。 |
添加同步模式
在工厂结构
中选择一个控制器。选择菜单栏中的同步模式图标
 。工作区将显示所有当前同步模式的列表。
。工作区将显示所有当前同步模式的列表。 选择添加命令按钮,然后输入名称和索引(仅对拧紧同步模式有效)。
在操作模式下拉菜单中选择拧紧或拧松。
新的同步模式在最低可能的位置添加,列表更新。
删除同步模式
在工厂结构
中选择一个控制器。选择菜单栏中的同步模式图标
。工作区将显示所有当前同步模式的列表。 对于要删除的每个同步模式,在工作区的最左列中,选中相应的复选框。
从下拉菜单中选择管理,然后选择删除。
所选同步模式将被移除,列表将更新。
处理拧紧同步模式配置
双击拧紧同步模式以配置同步模式。
属性
参数 | 说明 |
|---|---|
名称 | 用户定义的模式名称。 |
说明 | 模式说明。 |
引用拧松同步模式
拧紧同步模式可以链接到拧松同步模式。引用拧松同步模式位于拧紧同步模式的属性菜单中
从拧松同步模式下拉列表中选择相关的拧松同步模式。
拧紧同步模式的螺栓配置中使用的螺栓配置数量和通道编号应与选择的拧松同步模式相同,如果不同则会显示警告。
次品管理
参数 | 说明 |
|---|---|
最大失败步骤数 | 指出在整个拧紧期间可能失败的不同步骤的最大数量。如果相同的步骤不止失败一次也不要紧,它仍然只算作一个失败的步骤。 |
超出时的操作 | 指出如果超出最大失败步骤数时的操作。 |
修复期间状态 NOK 时的操作 | 指定当修复正在进行时如果检测到新错误 (NOK) 时的操作。 |
触发器
如要查看同步点表,必须在螺栓配置中为至少一个螺栓选择一个带有同步点的拧紧程序。
对于程序主路径中的每个同步点,可以指定不同的触发器来控制拒绝管理。
添加触发器
单击添加触发器旁的图标 +。
选择触发器。
为每个同步点设置操作。
删除触发器
单击添加触发器旁的图标 +。
单击要删除的触发器旁的删除图标。
默认触发器参数 | 说明 |
|---|---|
同步点 | 选定拧紧程序中的同步点。 |
默认失败 | 指定如果检测到错误时的主要操作。如果没有其他条件满足时使用。 |
默认失败(其他) | 此参数定义了未运行结束或终止的工具上的操作。 |
修复参数数量 | 说明 |
|---|---|
维修 | 指定可以从同步点启动的最大修复次数,如果未设置,则可以进行无限次的修复 |
修复操作 | 指定如果已进行最大次数的修复并且出现新错误时的操作 |
修复操作(其他) | 此参数定义了未运行结束或终止的工具上的操作。 |
NOK 通道参数 | 说明 |
|---|---|
NOK 通道 | 指定可能在同步点失败的最大通道数。如果未设置,失败通道设置的数量将永远不会用于决定操作。 |
NOK 通道操作 | 指定如果在同步点有太多的 NOK 通道失败时的操作。 |
NOK 通道(其他) | 此参数定义了未运行结束 NOK 或终止 NOK 的工具上的操作。 |
NOK 组参数 | 说明 |
|---|---|
NOK 组 | 指定可能在同步点失败的最大组数。如果未设置,失败组设置的数量将永远不会用于决定操作。 |
NOK 组操作 | 指定如果在同步点有太多的 NOK 组失败时的操作。 |
NOK 组(其他) | 此参数定义了未运行结束 NOK 或终止 NOK 的工具上的操作。 |
不可修复的参数 | 说明 |
|---|---|
不可维修 | 指定如果同步点中的总体状态为不可修复时的操作。 |
NOK 可修复(其他) | 此参数定义了未运行结束或终止的工具上的操作。 |
螺栓配置
要添加螺栓配置,请单击添加或添加多个。您最多可以有 64 个螺栓配置。
参数 | 说明 |
|---|---|
复选框 | 比如在删除通道时使用。 |
通道 | 通道数量,又称驱动器索引。 |
拧紧程序 | 选择拧紧程序菜单中定义的拧紧程序。 |
螺栓 | 拧紧时拧紧的实际紧固件。当采集特定螺栓的数据时,例如在现场总线信号螺栓拧紧状态下,该数字将用作地址。 |
螺栓名称(可选) | 螺栓的名称。 |
组 | 修复组用于在运行修复时对彼此依赖的螺栓进行分组。一个通道可以属于零个、一个或多个修复组。 |
拒绝管理
拒绝管理功能用于失败步骤的自动修复和终止。每个同步点的拧紧状态将被评估。如果状态正常,拧紧程序的下一部分将启动。如果状态为异常,应采取相应的行动来修复、终止或结束拧紧程序。
每个同步点的修复路径在拧紧程序的修复区域定义。
每个同步点的终止路径在拧紧程序的终止区域定义。
同步点处的状态
当所有工具都达到同步点时,每个工具的状态和总体状态将被评估。
OK | NOK | 不可维修 | 致命 | |
|---|---|---|---|---|
工具状态 | 到目前为止一切正常。 | 同步点之前的步骤有一个错误被监控器检测到。可对这些错误进行修复。 | 同步点之前的步骤有一个错误被限制检测到。 | 同步点之前的步骤有一个致命错误。发生该错误的原因可能为: |
修复组状态 | 修复组中的所有工具都到达同步点,状态为正常。 | 修复组中至少有一个工具到达同步点且状态为异常(并且均没有不可修复或致命状态)。 | 修复组中至少有一个工具到达同步点且状态为不可修复(并且均没有致命状态)。 | 修复组中至少有一个工具到达同步点,状态为致命。 |
总体状态 | 所有工具都到达同步点,状态为正常。在拧紧的下一步继续程序的执行。 | 至少有一个工具到达同步点且状态为异常(并且均没有不可修复或致命状态)。 | 至少有一个工具到达同步点且状态为不可修复(并且均没有致命状态)。 | 至少有一个工具到达同步点,状态为致命。 |
如果同步点处的总体状态为异常时的计算操作
如果同步点的总体状态为异常,则计算适用的操作。操作根据设置的触发器决定。实现的第一个触发器决定了要执行的操作:
已超过最大失败步骤数:
如果整个拧紧中失败步骤的总数超出最大失败步骤数,将使用已超出的操作。如果相同的步骤不止失败一次,它仍然只能算作一个失败的步骤。已超出最大修复数:
如果从当前同步点开始的修复总数超出修复数量触发器中的修复数,使用修复操作。最大失败组数:
如果失败组(异常状态的组)的数量超出异常通道数量触发器中的异常组数量,将使用异常组操作。最大失败工具数:
如果失败工具(异常状态的工具)的数量超出异常组数量触发器中的异常通道数量,将使用异常通道操作。默认失败操作:
如果上述条件皆不满足,将使用默认失败操作中的设置。
运行修复的操作
运行修复的工具将运行其修复路径中的步骤并跳回到先前的同步点。修复正在进行,直到程序返回启动修复的同步点。完成修复后,将再次评估工具和修复组的状态以及总体状态。如果当前的总体状态是正常的,所有工具将继续下一步,否则新的修复或终止将启动。
没有运行修复的工具将保持在当前的同步点,等待修复完成。
状态下的操作 | 总体状态异常 |
|---|---|
修复异常 | 状态异常的所有工具将运行修复。没有运行修复的工具将保持在当前的同步点,等待修复完成。 |
修复异常组 | 状态异常且属于修复组的所有工具将运行修复。修复组中的所有工具将运行修复,无论其个体状态如何。没有运行修复的工具将保持在当前的同步点,等待修复完成。 |
全部修复 | 所有工具,无论它们的状态如何,都将运行修复。 |
运行终止的操作
运行终止的工具将运行其终止路径中的步骤。之后,拧紧以异常状态完成。
状态下的操作 | 总体状态异常 | 总体状态不可修复 |
|---|---|---|
终止异常 | 状态异常的所有工具将运行终止。 | 状态异常或不可修复的所有工具将运行终止。 |
终止异常组 | 状态异常且属于修复组的所有工具将运行终止。修复组中的所有工具将运行终止,无论其个体状态如何。 | 状态异常或不可修复且属于修复组的所有工具将运行终止。修复组中的所有工具将运行终止,无论其个体状态如何。 |
终止所有 | 所有工具,无论它们的状态如何,都将运行终止。 | |
状态正常的工具将根据设置其他:
- 继续,其他工具将在当前同步点等待,直到终止完成。之后,它们将继续执行拧紧程序的其余部分。
- 结束所有,其他工具将终止拧紧。
操作结束拧紧程序
结束拧紧程序的工具将直接转到最后,而不运行任何其他步骤。之后,拧紧以异常状态完成。
状态下的操作 | 总体状态异常 | 总体状态不可修复 |
|---|---|---|
结束异常 | 所有状态异常的工具将在不运行终止路径的情况下结束拧紧。 | 所有状态异常或不可修复的工具将在不运行终止路径的情况下结束拧紧。 |
终止异常组 | 所有状态异常且属于修复组的工具将在不运行终止路径的情况下结束拧紧。修复组中的所有工具将结束拧紧,无论其个体状态如何。 | 所有状态异常或不可修复且属于修复组的工具将在不运行终止路径的情况下结束拧紧。修复组中的所有工具将结束拧紧,无论其个体状态如何。 |
结束所有 | 所有工具,无论它们的状态如何,将在不运行终止路径的情况下结束拧紧。 | |
状态正常的工具将根据设置其他 :
- 继续:其他工具将继续执行拧紧程序的其余部分。
- 终止所有:其他工具将运行终止。
总体状态为致命时的操作
如果总体状态为致命时,不允许修复。具有“致命”状态的工具不能再运行,因此它们将只会结束拧紧。其他工具将终止,不管它们的个体状态如何。
如果其中一个螺栓不合格,但在拧紧程序中未配置修理操作,则模式将全部结束。异常将说明该螺栓的主要异常原因。
如果其中一个螺栓不合格并且具有修理路径,则系统会尝试修理,直到异常螺栓达到最大时间限制。其他正常的螺栓则会等待。如果螺栓在经过 n 次修理后仍然可以正常运作,则程序按照上面第一个程序中的所有螺栓继续。如果螺栓仍然不能正常运作,则整个同步模式将以第二项结束。
处理拧松同步模式配置
双击拧松同步模式以配置同步模式。
参数 | 说明 |
|---|---|
名称 | 用户定义的模式名称。 |
说明 | 模式说明。 |
螺栓配置
拧松同步模式的螺栓配置只能链接到一个拧松多步骤程序,并且只列出可用的拧松多步骤程序。
要添加螺栓配置,请点击添加或添加多个。您最多可以有 64 个螺栓配置。
参数 | 说明 |
|---|---|
复选框 | 比如在删除通道时使用。 |
通道 | 通道数量,又称驱动器索引。 |
拧松程序 | 选择拧紧程序菜单中定义的拧松多步骤程序。 |
运行拧松同步模式
可以通过以下可能的方式运行拧松同步模式:
必须满足开始拧紧的所有条件(例如:没有紧急停止,设置启用信号等),以便上述所有情况都能正常工作。
使用输入选择拧松运行拧松同步模式
选择具有相关拧松同步模式的拧紧同步模式。
这可以通过在现场总线和 SoftPLC 下的现场总线子选项卡的到控制器区域中添加 I/O 信号选择输入,Id
10020 来完成,或者也可以通过选择虚拟站点选项卡  下的任务中的任务来完成。
下的任务中的任务来完成。
使用现场总线和 SoftPLC
下的现场总线子选项卡中的到控制器区域中的 I/O 信号选择拧松,Id 10029 来选择拧松。使用以下两个信号中的任何一个开始拧松:
开始驱动(连续),Id 10028
开始驱动(脉冲),Id 10113
使用输入开始拧松来运行拧松同步模式
选择具有相关松动同步模式的拧紧同步模式
这可以通过在现场总线和 SoftPLC 下的现场总线子选项卡的到控制器区域中添加 I/O 信号选择输入,Id
10020 来完成,或者也可以通过选择虚拟站点选项卡 下的任务中的任务来完成。
使用两个信号中的任何一个开始拧松:
开始拧松(连续),Id 10011
拧松脉冲开始(脉冲),Id 10072
复制和粘贴同步模式
现有的同步模式可以复制并粘贴在同一个控制器上,也可以从一个控制器复制,然后粘贴到另一个控制器上。
复制和粘贴只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
在菜单栏中,选择同步模式
 选项卡。工作区显示可用同步模式的列表。
选项卡。工作区显示可用同步模式的列表。通过以下方式复制同步模式:
右键点击要复制的同步模式,然后从菜单中选择复制。
或者通过选中每行前面的复选框来选择多个同步模式,点击右键,然后从菜单中选择复制。
在工厂结构
中,选择要将同步模式粘贴到哪一个控制器。在菜单栏上,选择同步模式 选项卡,然后右键点击工作区区域中的任意位置并选择粘贴。粘贴的同步模式将被添加到列表中的第一个可用位置。
如果没有可用的插槽,则同步模式将添加到列表的底部,并被分配可用的最小索引号。不能更改索引号来重新安排顺序。(此操作仅对拧紧同步模式有效)
粘贴同步模式时,还包括连接的多步骤拧紧程序。默认情况下不会复制与该多步骤拧紧程序连接的拧松同步模式。如果没有空间可以导入多步骤拧紧程序,因为已达到最大数量,则整个粘贴操作将失败。
导出同步模式
同步模式可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
在工厂结构
中,从列表中选择一个控制器。在菜单栏中,选择同步模式
选项卡。工作区将显示所有当前同步模式的列表。选择待导出的同步模式的复选框。
从下拉菜单中选择管理,然后选择导出。
浏览器窗口打开用于保存导出文件。
默认文件名为 <SyncModeName>.json,导出的文件可以赋予任何带* .json扩展名的名称。
选择保存。
导入同步模式
同步模式可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
在工厂结构
中,从列表中选择一个控制器。在菜单栏中,选择同步模式
选项卡。工作区将显示所有当前同步模式的列表。 选择添加命令按钮然后选择导入。
选择打开文件然后浏览以选择相关的 .json 文件。
选择添加。
导入同步模式时,还包括连接的多步骤拧紧程序。如果没有空间可以导入多步骤拧紧程序,因为已达到最大数量,则整个导入操作将失败。
使用批次序列选项卡
批次序列任务可在虚拟站点任务配置中选择,或通过外部输入来源选择。
拧紧顺序可按固定方案进行,也可留给操作员在无序方案中决定。在任何情况下,套筒或信号都可用来在控制器与操作员之间通信。
批次包括一个拧紧程序,它可以重复多次。
当操作需要批次/拧紧程序组合时,批次序列是一组有序的批次。
在工厂结构
中选择一个控制器。 转到批次序列
 。
。
各列包含下列信息:
列 | 说明 |
|---|---|
名称 | 每个批次序列名称均以一个索引号开头。可以将后面的字符更改为用户定义的任何名称。 |
最后更改 | 用 ToolsTalk 2 时间表示。 |
最后更改人 | 配置数据最后由 <user> 更改。 |
控制器更新时间 | 用控制器时间表示。 |
控制器更新人 | 控制器由 <user> 更新。 |
更改人和控制器更新人字段可以是 ToolsTalk 2 界面中创建的注册 ToolsTalk 2 用户。
命令 | 说明 |
|---|---|
管理 |
当配置被删除时,配置列表将无序显示索引号。索引号不会更改。添加一个新配置将尝试为配置找到最空闲的索引位置。 |
添加 | 创建或导入一个新的批次序列。 |
批次序列名称由一个索引号与一些可选字符组成。索引位置无法更改。新配置将被提供最小的可用索引号。当使用来源和识别码数字成为任务选择过程的一部分时,索引号非常重要。
批次序列配置工作区
批次序列配置工作区显示单个批次序列以及下列配置菜单的详情:
基本设置,含配置名称和说明。
常规设置,控制拧紧流程和顺序。
序列配置,从单个拧紧程序创建批次序列。
在工厂结构工作区
中选择一个控制器。在菜单栏中选择批次控制
。双击想要的批次序列的名称以显示菜单。
批次序列配置菜单
属性菜单中的选项如下:
参数名称 | 说明 |
|---|---|
名称 | 默认名称批次序列。可编辑。 |
说明 | 分配给批次序列的可选说明。 |
批次序列完成时锁定工具 | 开启:批次序列完成时锁定工具。 关闭:批次序列完成时解锁工具。 |
自由顺序 | 否:序列内的批次按索引号所列的顺序执行。如果已指定套筒,则在即将执行批次时,系统将会提示提供下一个套筒。 是:序列内的拧紧和批次可以任何顺序执行。操作员必须向系统指出哪个批次即将通过使用充当识别码数字的套筒选择器位来执行。 |
NOK 数增加 | 否:如果拧紧失败 (NOK),批次计数器的计数不增加。 是:如果拧紧失败 (NOK),批次计数器的计数增加。 |
最大连续 NOK 次数 | 最大连续 NOK 次数为一个批次中最大允许的连续失败拧紧次数。如果达到该值,将显示事件 NOK 拧紧次数过多 (4020)。 |
拧松递减 | 从不:批次计数器在执行拧松时不递减。这是默认值。 始终:批次计数器在执行拧松时递减。 最近拧紧 OK 时:如果前面的拧紧是 OK 的,则批次计数器在执行拧松时递减。 |
顺序中断时间 | 日期:选定批次序列将在规定时间限制范围内中止。当选择打开时,中止时间字段打开。 关闭:选定批次序列不能中断。 |
中止时间 | 选定批次序列将中止的秒数。允许的范围介于 1 s 到 1600 s 之间。 |
出现以下任何一种情况时,批次序列完成(且工具可能被锁定):
所有拧紧已完成,结果为 OK 或 NOK。
中止序列信号终止任务。未执行拧紧被报告,结果为 NOK。
在序列配置菜单中,不同的批次被合并到批次序列中。批次包括一个单一拧紧程序,它可以重复多次。
序列配置菜单中的每行代表一个单一的批次。
列 | 说明 |
|---|---|
复选框。 | |
批次 | 批次索引号(序列内的序号)。 |
拧紧程序 | 下拉菜单。为该批次选择拧紧程序。 |
批量大小 | 批次将包含的拧紧次数。 |
识别码数字 | 外部生成的识别码数字或套筒选择器位置转换为识别码数字。
|
向批次序列添加新批次
在工厂结构
中,从列表中选择一个控制器。在菜单栏上,选择批次序列
选项卡。工作区显示批次序列的列表。选择序列配置菜单中的添加命令按钮。创建一个新的批次序列窗口将打开。
为批次序列分配一个名称,然后选择添加。
在属性中选择相关参数。
在序列配置中为批次选择一个拧紧程序。
输入批次大小(批次将包含的拧紧次数)。
输入一个可选的识别码。
在序列列表中的第一个空缺位置将分发新的批次序列。如果没有空缺的插槽,它将被放置在列表底部,并被分配可用的最小索引号。不能更改索引号来重新安排批次拧紧顺序。
复制和粘贴批次序列
现有的批次序列可以复制并粘贴在同一个控制器上,也可以从一个控制器复制,然后粘贴到另一个控制器上。
复制和粘贴只能在同一控制器或者在相同类型且运行相同软件版本的不同控制器上执行。
当复制现有的批次序列时,还将复制与批次序列关联的所有程序。这些配置只是副本,可以根据要求进行更改。
在菜单栏上,选择批次序列
选项卡。工作区显示可用批次序列的列表。通过以下方式复制批次序列:
右键点击要复制的批次序列,然后从菜单中选择复制。
或者通过选中每行前面的复选框来选择多个批次序列,点击右键,然后从菜单中选择复制。
在工厂结构
中,选择要将批次序列粘贴到哪一个控制器。在菜单栏上,选择批次序列 选项卡,然后右键点击工作区区域中的任意位置并选择粘贴。粘贴的批次序列将被添加到列表中的第一个可用位置。
如果没有可用的插槽,则批次序列将添加到列表的底部,并被分配可用的最小索引号。不能更改索引号来重新安排顺序。
导出批次序列
批次序列可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
导出现有批次序列时,还将导出与该批次序列关联的所有程序和模式。这些配置只是副本,可以根据要求进行更改。
在工厂结构
中,从列表中选择一个控制器。在菜单栏上,选择批次序列选项卡
。工作空间区域将显示所有当前批次序列的列表。选择待导出的批次序列的复选框。
从下拉菜单中选择管理,然后选择导出。
浏览器窗口打开用于保存导出文件。
默认文件名为 <BatchSequenceName>.json,导出的文件可以赋予任何带* .json扩展名的名称。
选择保存。
导入批次序列
批次序列可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或运行相同软件版本和控制器类型的不同控制器上执行。
导入现有批次序列时,还将导入与该批次序列关联的所有程序和模式。这些配置只是副本,可以根据要求进行更改。
在工厂结构
中,从列表中选择一个控制器。在菜单栏上,选择批次序列
选项卡。工作空间区域将显示所有当前批次序列的列表。 选择添加命令按钮然后选择导入。
选择打开文件然后浏览以选择相关的 .json 文件。
选择添加。
如果没有可用的插槽,则批次序列将添加到列表的底部,并被分配可用的最小索引号。不能更改索引号来重新安排顺序。
删除批次序列中的批次
在批次序列
中,选中要删除的批次的复选框。选择复选框可启用管理命令按钮功能。选择管理命令按钮,然后从下列列表中选择删除。选定的批次将从列表中移除。
当批次从批次序列中删除时,索引序列被压缩和更新,不留空隙。已删除的批次序列的索引号将自动分配给下一个创建的序列。
使用来源选项卡
任务的选择在虚拟站点配置工作区的任务菜单中完成。
用作拧紧任务的外部信号在来源  选项卡中配置。来源为与虚拟站点相连的附件或同类附件。提供两类来源任务:
选项卡中配置。来源为与虚拟站点相连的附件或同类附件。提供两类来源任务:
来源拧紧任务
来源批次任务
来源拧紧用于选择单个同步模式。
来源批次用于选择批次序列 - 一系列同步模式。
来源拧紧概览
拧紧菜单显示来源批次和来源拧紧配置的列表。可以通过转到有问题的虚拟站,然后在任务属性中选择选择,将单独的列表链接到虚拟站。在此可以将来源选为任务。来源拧紧将特定拧紧程序与识别编号关联。当将识别编号发送至控制器,关联程序将一直运行,直至发送不同的信号。
参数名称 | 说明 |
|---|---|
名称 | 分配给来源拧紧的名称。 |
说明 | 来源拧紧的描述。 |
批次序列完成时锁定工具 | 开启:批次序列完成时锁定工具。 关闭:批次序列完成时解锁工具。 |
NOK 数增加 | 开启:即使执行 NOK 拧紧操作,批次也会前进。 关闭:只有执行成功的拧紧时,批次才会前进。 |
每个程序的最大连续 NOK 次数 |
|
最大连续 NOK 次数 | 设置允许的连续 NOK 结果的数量。如果该值设置为 0,则不会检查 NOK 拧紧情况。当达到最大连续 NOK 时,控制器锁定工具并停止来源拧紧执行。 |
批次控制 | 选择如何执行来源拧紧:
|
命令 | 说明 |
|---|---|
添加 | 添加新的一行,为它提供可用的最小识别码数字。 |
删除 | 从列表中删除选定的同步模式。通过选择相应的复选框来选择同步模式。 |
创建来源拧紧
在工厂结构工作区
中选择一个控制器。转到来源
选项卡。选择添加,创建新的来源配置对话窗口将打开。从下拉菜单中选择拧紧,然后选择添加。
为来源拧紧分配一个名称。
设置允许的最大连续 NOK 结果的数量。如果该值设置为 0,则不会检查 NOK 拧紧情况。当达到最大连续 NOK 时,控制器锁定工具并停止来源拧紧执行。
从下拉菜单中选择要使用的批次控制。
内部批次控制:配置来源拧紧应重复多少次。
外部批次控制:使用开放协议或现场总线来配置执行来源拧紧的次数。任何配置更改都将清除来源拧紧,从清洁且已知的状态重新开始(批次中的批次计数将重置为 0)。进行中的拧紧可在更改生效之前完成。
在创建新的来源拧紧时,默认只提供一个可编辑的标识符号。选择添加以添加更多。
给每个项分配一个标识符编号。
选择模式并从列表中选择一个与每个识别编号相关联的模式。
创建来源批次
在工厂结构工作区
中选择一个控制器。转到来源
选项卡。选择添加,创建新的来源配置对话窗口将打开。从下拉菜单中选择批次,然后选择添加。
为来源批次分配一个名称
如果扫描新的标识符字符串中止之前扫描,将中止新的标识符设为是。
选择标识符方法(文本字符串或数字串数)。
将自由顺序设置为开,如果可以以任何顺序扫描字符串。
标识符字符串可以由最多 4 个不同的字符串组成。如果自由顺序设置为“否”,则必须以特定的顺序扫描字符串,系统才能识别。
将自由顺序设置为开时可能发生错误,不同字符串的长度出现重复。此时,扫描顺序不会启用拧紧程序。如需修复该错误,将自由顺序设置为关,或者调节字符串长度。
为字符串命名并输入字符串的长度。(有关串联字符串的更多信息,请参见《用户指南》中的“相关信息”)。
有效位 - 字符串中的相关位置。(有关有效位的更多信息,请参见《用户指南》中的“相关信息”)。
保存位 - 需要由系统记录的位置。(有关保存的位置的更多信息,请参见《用户指南》中的“相关信息”)。
指明应将哪些字符串(在字符串中包含列中)与哪些批次序列(在启用列)关联在一起。选择添加,添加更多字符串。
键入“字符串中包含”时可使用通配符。通配符可以用于字符串中的任何位置。模糊匹配结果不会启用批次序列。
通配符是 .(句号)
中止新的标识符控制当批次序列被激活且进行时,第二信号应如何解释。
如果识别码数字被用在批次序列配置 中,输入信号或套筒选择器可被用于选择批次序列中的批次。
控制器经配置后可基于标识符编号或标识符字符串选择带有输入信号的批次序列。
有效位
有效位的作用是,将字符串组合成您预定义的字符串时,定义读取条码字符串中的哪个字符。有效位的数量必须与预定义字符串中的字符数量相同。
配置有效位,以读取条码字符串
条形码字符串中的位与 1 到 1024 之间的一个数字相关。字符串的第一位是 1,最后一位是 1024。
说明 | 分辨位 | 有效配置 | 与预定义字符串匹配的条码字符串 |
|---|---|---|---|
顺序排列分辨位 | 1,2,3,7,8 | 确定 | ABCGH |
以可选顺序排列分辨位 | 7,1,2,3,8 | 确定 | GABCH |
数字范围 | 1-3,7-8 | 确定 | ABCGH |
组合标识符字符串
用于匹配的标识符字符串由最多四个来自工厂管理系统的字符串组成,或者由最多四个需要组合成一个字符串的条形码枪输入组成。
添加和删除命令按钮用于管理有多少字符串被组合。提供以下参数:
参数 | 说明 |
|---|---|
复选框 | 选择要删除的条目 |
名称 | 字符串应为指定名称。 |
长度 | 字符串的长度应已知且须输入。这对能够组合正确的字符串标识符十分重要。 |
分辨位 | 组合字符串中的分隔号位置或范围(由连字符分开)供匹配使用。 |
已保存的位置 | 将被保存到结果的字符串中的逗号分隔位置或范围。 |
如果使用多个标识符字符串,则执行以下步骤:
按下添加指令按钮,在表中创建新条目。
为字符串命名。
输入字符串的长度。
对要添加的每个字符串重复步骤 1-3。最多可以组合四个字符串。
每行中的“开始-结束”参数定义各字符串在匹配过程的接下步骤中使用的组合字符串标识符。
任务选择过程使用标识符字符串作为输入的第一部分用于定义字符串中将要使用的位置。
输入分辨位置以定义识别码字符串中将用于匹配的位置。此类位置必须以逗号分隔或按范围排列。
已保存的位置
保存位是一个字段,其中用户可以指明保存来源批次中使用的每个字符串哪些部分,以及如何在日志中进行反映。在此字段中,指明需要在字符串中保存的位置。位置可能只构成整个字符串的一部分。如果字段留空,将保存整个(相连)字符串。下表只显示保存位组合的部分示例。
保存位值用逗号分开(不带空格),范围使用连字符指明。
标识符字符串 | 位置 |
|---|---|
字符串 1:1234567 | 1-7 |
字符串 2:abcdef | 8-13 |
字符串 3:GHIJKL | 14-19 |
字符串 4:890 | 20-22 |
已保存的位置 | 保存结果 |
|---|---|
(空) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 将自动变更为:1-12,19-21 | 1234567abcdeL89 |
复制和粘贴来源批次或来源拧紧
现有的来源批次或来源拧紧可以复制并粘贴在同一个控制器上,也可以从一个控制器复制,然后粘贴到另一个控制器上。
复制和粘贴只能在同一控制器或者在相同类型且运行相同软件版本的不同控制器上执行。
复制现有来源批次或来源拧紧时,还将导入与该拧紧或批次序列关联的所有程序和模式。这些配置只是副本,可以根据要求进行更改。
在菜单栏上,选择来源
选项卡。工作区显示可用来源批次和来源拧紧的列表。通过以下任一方式复制来源批次或来源拧紧:
右键点击要复制的来源批次或来源拧紧,然后从菜单中选择复制。
或者通过选中每行前面的复选框来选择多个来源批次或来源拧紧,点击右键,然后从菜单中选择复制。
在工厂结构
中,选择要将来源粘贴到哪一个控制器。在菜单栏上,选择来源 选项卡,然后右键点击工作区区域中的任意位置并选择粘贴。
在序列列表中的第一个空缺位置将分发新的来源批次或来源拧紧。如果没有空缺的插槽,它将被放置在列表底部,并被分配可用的最小索引号。不能更改索引号。
导出来源批次或来源拧紧
来源批次或来源拧紧可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或者在相同类型且运行相同软件版本的不同控制器上执行。
导出现有来源批次或来源拧紧时,还将导出与该拧紧或批次序列关联的所有程序和模式。这些配置只是副本,可以根据要求进行更改。
在工厂结构
中,从列表中选择一个控制器。在菜单栏上,选择来源选项卡
。工作区显示所有当前来源批次和来源拧紧的列表。选择要导出的来源批次或拧紧的复选框。
从下拉菜单中选择管理,然后选择导出。
浏览器窗口打开用于保存导出文件。
默认文件名为 <SyncModeName>.json 或 <SourceTightening>.json,导出的文件可以命名为任何带 *.json 扩展名的名称。
选择保存。
导入来源批次或来源拧紧
来源批次或来源拧紧可以从一个控制器导出并导入另一个控制器。
导出和导入只能在同一控制器或者在相同类型且运行相同软件版本的不同控制器上执行。
导入现有来源批次或来源拧紧时,还将导入与该拧紧或批次序列关联的所有程序和模式。这些配置只是副本,可以根据要求进行更改。
在工厂结构
中,从列表中选择一个控制器。在菜单栏上,选择来源选项卡
。工作区显示所有当前来源批次和来源拧紧的列表。选择添加命令按钮然后选择导入。
选择打开文件然后浏览以选择相关的 .json 文件。
选择添加。
在序列列表中的第一个空缺位置将分发新的来源批次或来源拧紧。如果没有空缺的插槽,它将被放置在列表底部,并被分配可用的最小索引号。不能更改索引号。
使用配置选项卡
扫码枪、多层警示灯和工具只是一些通过 I/O 总线连接到控制器的设备类型举例。多台设备可连接到 I/O 总线,每种设备有其自己的一组配置参数。操作前,配置必须分配给虚拟站点。
查看现有配置
在工厂结构
中选择一个控制器。 选择菜单栏中的配置选项卡
 。
。工作区将显示所有当前配置的列表。
双击工作区列表中的行查看所选配置的详情。
工作区显示配置菜单,在这里可配置所选的设备。
配置概述列表 列
说明
复选框
选择访问管理命令按钮列表。
名称
显示控制器模板的名称。
类型
配置设置类型。
库链接
如果存在配置的库链接,则显示是。
最后更改
最后进行的更改,用 ToolsTalk 2时间表示。
更改人
由 <user> 进行最后更改
控制器更新时间
最后进行的更改,用控制器时间表示。
控制器更新人
由 <user> 对控制器进行最后更新
可以通过点击每列的标题来排序列表。
添加配置
在配置
中,选择添加。创建新配置对话窗口将打开。从下拉列表中选择设备类型,然后选择添加
在属性菜单中,输入配置名称和说明。
根据所选的设备类型,每个配置都有自己的一组输入和输出信号。如何配置每种类型的设备被单独描述。
导入配置
在配置
中,选择添加。创建新配置对话窗口将打开。选择导入选项卡。
选择打开文件。
浏览器窗口打开用于读取导入文件。
选择所需的导入文件。文件格式必须为 <configuration_name>.json。选择打开。
在对话窗口中选择添加。
删除配置
在配置
中,选中要删除的配置的复选框。选择复选框可启用管理命令按钮功能。从下拉菜单中选择管理,然后选择删除。
选定的配置将从列表中移除。
只有当配置没有分配给虚拟站点时,才能将其删除。
配置类型
内部 I/O
控制器内部有两个螺丝端子。它们可用于连接数字输入和输出信号。
参考部分所列的所有数字输入信号和数字输出信号可路由到内部 I/O 端子。
有关电气规范和连接,请参见控制器文档。
在虚拟站点 部分描述了如何分配附件配置到虚拟站点。
I/O 扩展模块
I/O 扩展模块连接到 I/O 总线,用于提供连接数字输入和输出信号所需的扩展。可以连接多个扩展模块。请阅读 I/O 扩展模块文档了解地址配置以及连接规范。
在虚拟站点 部分描述了如何分配附件配置到虚拟站点。
操作面板
操作面板连接到 I/O 总线,用于在操作员与控制器之间提供可配置的数字通信链接。在通信时使用灯、按钮、蜂鸣器和开关。请阅读操作面板文档了解地址配置以及连接规范。
在虚拟站点 部分描述了如何分配附件配置到虚拟站点。
排灯
多层警示灯提供从控制器到操作员的远距离可视通信。此附件除了配有灯之外,还配有按钮、钥匙开关、蜂鸣器和 I/O 连接。
多层警示灯通过 I/O 总线连接到控制器。多个附件可以连接到 I/O 总线。请阅读多层警示灯文档了解地址配置以及连接规范。
在虚拟站点图标 下描述了如何分配附件配置到虚拟站点。
指示灯盒
指示符框是一个灵活的显示指示符,用于显示来自控制器的状态信号。显示屏配有 20 个双色 LED,它们安装在一个正方形中,每边 5 个 LED。
配置指示符框
在配置
菜单中选择指示符框。 如要添加 LED,请点击添加按钮。
根据图示在位置框中选择 LED 字母。
为红色和绿色 LED 选择信号。
如要移除 LED,请选择 LED,然后点击删除按钮。
工具配置
通过工具配置,可以激活和配置与该工具相关的各种功能。每个工具配置都可以映射到硬件布局配置中的工具。
如要查看或编辑工具配置菜单:
在工厂结构工作区
中选择一个控制器。 单击菜单栏中的配置
图标。工作区显示当前附件配置。
添加新的配置或双击类型为工具配置的现有配置。
进行必要的配置。参数描述在各部分。
工具配置分为以下菜单:
菜单 | 说明 |
|---|---|
属性 | 配置名称和说明以及工具类型过滤器。 |
常规 | 工具常规参数。 |
双传感器 | 双传感器功能。 |
属性
工具配置应被赋予一个唯一的名称。还提供可选的说明字段。
附件配置列表按字母顺序显示所有配置
如要查看或编辑工具配置菜单:
在工厂结构工作区
中选择一个控制器。选择菜单栏中的配置图标
。工作区将显示所有当前附件配置的列表。
双击所选工具配置的名称。
工作区显示当前配置的详细信息,并分成不同的菜单,每个主题一个。
在属性菜单中输入配置名称和说明。
从按工具类型过滤下拉菜单中选择一种工具类型。
随着工具数量的增加,菜单数量也会增加。为了增加工作区的视觉舒适度,可以过滤菜单,只显示与所选工具类型相关的内容。过滤器在属性菜单中设置。如果未选择工具,所有可能的工具配置参数将显示。
常规
使用启动来源设置工具启动方式。
启动来源 | 说明 |
|---|---|
仅触发器 | 按下工具触发器开始拧紧操作。 |
触发“或”按压 | 按下工具触发器或者将工具压向连接件,开始拧紧操作。 |
触发“与”按压 | 按下工具触发器并将工具压向连接件,开始拧紧操作。 |
仅按压 | 将工具压向连接件开始拧紧操作。 |
数字输入 | 使用外部数字输入信号触发拧紧的启动。 |
双传感器
双传感器 | 说明 |
|---|---|
主扭矩传感器 | 用于拧紧的扭矩传感器。 |
主角度传感器 | 用于拧紧的角度传感器。 |
要求双扭矩 | 如果连接的工具必须有双扭矩传感器(未禁用)才能拧紧。 |
要求双角度 | 如果连接的工具必须有双角度传感器(未禁用)才能拧紧。 |
绘制图中的次级扭矩 | 如果来自次级扭矩传感器的值包含在绘制图中。 |
绘制图中的次级角度 | 如果来自次级角度传感器的值包含在绘制图中。 |
启用双转矩限制 | 如果双扭矩传感器限制处于活动状态。 |
最大扭矩差 | 双扭矩差限制的限值。 |
启用双角度限制 | 如果双角度传感器限制处于活动状态。 |
最大角度差 | 双角度差限制的限值。 |
扫码枪
扫码枪是一个附件,它通过 USB 电缆直接安装到控制器。
在扫码枪配置中,可以配置是开启还是关闭“通过”功能。默认配置为关闭。当“通过”功能被激活(设为开启)时,扫描的条形码信息将发送到 SoftPLC 或现场总线进行解码。
在工厂结构工作区
中选择一个控制器。在工作区的选项卡菜单栏,选择配置图标
。工作区显示一个配置列表。
双击类型列中包含扫码枪的配置行。
此外,还可选择添加创建一个新的扫码枪配置。
参数 | 说明 |
|---|---|
名称 | 配置的可选名称 |
说明 | 可选配置说明 |
通过 = 开启 | 扫描的条形码被发送到 SoftPLC 或现场总线进行解码 |
通过 = 关闭 | 扫描的条形码在控制器中解码 |
扫码枪配置
条码枪为工具附件,它安装在工具上并与工具附件总线相连。它有一个可激活扫码枪的功能按钮。
在扫码枪配置中,可以配置是开启还是关闭“通过”功能。默认配置为关闭。当“通过”功能被激活开启时,扫描的条形码信息将发送到 SoftPLC 或现场总线进行解码。
配置扫码枪
在工厂结构工作区
中选择一个控制器。在工作区的选项卡菜单栏,选择配置图标
。工作区显示一个配置列表。
点击添加创建一个新配置。
从配置类型下拉列表中选择扫码枪
然后点击添加
进行所选的配置。配置自动保存在 ToolsTalk 2 中。
参数 | 说明 |
|---|---|
通过 = 开启 | 扫描的条形码被发送到 SoftPLC 或现场总线进行解码 |
通过 = 关闭 | 扫描的条形码在控制器中解码 |
在虚拟站点 部分描述了如何分配附件配置到虚拟站点。
一般虚拟站点
在工厂结构工作区
中选择一个控制器。在工作区的选项卡菜单栏,选择配置图标
。工作区显示一个配置列表。
双击类型列中包含常规虚拟站点的配置行。
此外,还可选择添加创建一个新的常规虚拟站点配置。
参数 | 说明 |
|---|---|
名称 | 配置的可选名称 |
说明 | 可选配置说明 |
非拧紧结果可不经过滤进行报告(默认),也可配置为有选择地报告结果。可创建最多 16 个常规虚拟站点配置。
受影响的非拧紧结果:
拧松
批次递增
批次递减
重置批次
忽略拧紧程序
终止批次序列
重置批次序列
当使用 StepSync 或 Flex 控制器时,在常规虚拟站点配置中也可以看到以下参数。
固定站点
自动启用可以使用以下设置之一,默认设置为“从不”。
设置 | 说明 |
|---|---|
从不 | 输入启用操作必须设置为高才能运行拧紧。 |
始终 | 无论输入启用操作的状态如何,始终都可以运行拧紧。 |
创建一个非拧紧结果过滤器
默认设置为“开启” - 所有结果将被报告。切换到“关闭”以过滤结果,只有设为“开启”的过滤器才会被报告。
非拧紧结果将始终显示在控制器和 web 用户界面中,无论什么被过滤到报告中。
如要应用常规虚拟站点配置,应将它分配到虚拟站点 部分的虚拟站点。
只有未分配的常规虚拟站点配置才能被删除。
启用和禁用拧紧设置
一般虚拟站点配置包含一个拧紧部分,在这里可以为禁用拧紧和禁用拧松设置参数。
在工厂结构
中选择一个控制器。 转到菜单栏中的配置选项卡
。工作区显示可用的配置。
双击现有的一般虚拟站点进行配置,或选择添加以创建一个新的虚拟站点进行配置。
根据下表中的信息,在拧紧设置参数中进行相关选择。
参数值 | 说明 |
|---|---|
关闭 | 无论拧松状态如何,禁用的工具都将保持禁用状态。 |
OK 时开启 | 执行正常拧松后,将解锁已禁用的工具。 |
始终 | 无论拧松状态如何,一旦拧松,将解锁已禁用的工具。 |
禁用拧松 | 说明 |
|---|---|
关闭 | 禁用松开关闭。操作员可以始终松开一根螺钉。 |
开启 OK 拧紧 | 针对 OK 拧紧禁用松开。操作员不得松开与拧紧 OK 端接的螺钉。 |
开启 NOK 拧紧 | 针对 NOK 拧紧禁用松开。操作员不得松开与拧紧 NOK 端接的螺钉。 |
始终 | 禁用松开始终开启。操作员切勿松开一根螺钉。 |
禁用拧紧 | 说明 |
|---|---|
关闭 | 禁用拧紧关闭。操作员可以始终拧紧一颗螺钉。 |
开启 OK 拧紧 | OK 拧紧后禁用拧紧。如果当前拧紧以 OK 终止,则操作员不能拧紧另一颗螺钉。 |
开启 NOK 拧紧 | NOK 拧紧后禁用拧紧。如果当前拧紧以 NOK 终止,则操作员不能拧紧另一颗螺钉。 |
在每次拧紧后 | 每次拧紧后都会激活禁用拧紧。在当前拧紧终止之前,操作员不能拧紧另一颗螺钉。 |
工具锁定行为
默认情况下,工具锁定行为设置为“关闭”。可以对此行为进行超控,以允许操作员通过执行拧松来解锁工具。
拧松后允许解锁禁用的工具
在工具使用的配置中(在工具连接的“虚拟站点”中设置),将拧松时解锁工具设置为正常时开启或始终。
为了启用上述设置,需要满足三个条件:
1.禁用拧松参数不可设置为关或始终。
2.禁用拧松值不可设置为与禁用拧紧相同的值。
3.使用的拧紧程序必须启用了拧松。
当工具由于禁用状态而被锁定无法进行拧紧或拧松,可通过以下输入信号解锁:
Master_Unlock
Unlock_Tool_On_Disable
该输入信号可以从附件、可编程工具附件或现场总线单元发送到控制器。
套筒选择器
查看/编辑或创建套筒选择器配置
套筒选择器连接到 I/O 总线,用于帮助操作员针对拧紧程序选择正确的套筒。
在工厂结构
中选择一个控制器。 转到配置
。工作区显示为所选控制器创建的配置列表。
双击所选套筒选择器配置的名称,以查看或编辑配置。
在配置
中,选择添加。创建新配置对话窗口显示。从下拉列表中选择套筒选择器,然后选择添加。
在菜单的属性区,输入配置名称和说明。
在套筒选择器配置中,选择控制类型自动或外部。
为应激活的每个套筒位置选择相应的复选框
。为应禁用的每个套筒位置清除相应的复选框 。
如要添加或移除一组套筒(四个),选择添加或删除。
可以最多使用 32 个套筒选择器位置。
有关如何处理并分配配置到虚拟站点的更多信息请参见虚拟站点部分 。
套筒选择器控制开关
控制开关有两个位置:
位置 | 说明 |
|---|---|
自动 | 控制器控制套筒选择器上的 LED 灯,它将引导操作员进行正确的套筒选择。 |
外部 | 控制器没有控制套筒选择器。LED 灯的所有功能由外部控制系统通过开放协议通信或现场总线模块控制。 |
使用工具选项卡
工具工作区显示已连接到控制器的工具列表。用于固定式工具的控制器和用于手持式工具的控制器的菜单显示是不一样的,它们提供有关所连接工具的详细信息。
在设置菜单中,可设置工具报警。这些报警的触发点来自工具菜单。
如要查看工具菜单:
在工厂结构工作区
中选择一个控制器。转到工具
 部分。
部分。已连接到控制器的工具列表将被显示。
列
说明
工具类型
描述工具的类型。
型号
工具的具体型号。
序列号
工具的序列号。
MAC 地址
MAC 地址只有在工具已获得 MAC 地址时才可见。
软件版本
工具的软件版本。
最大扭矩
工具可产生的最大扭矩值。
TurboTight 最大扭矩
工具在使用 TurboTight 策略时可产生的最大扭矩值。
仅适用于某些工具。
结合 TensorPulse 时的最大扭矩
工具在使用 TensorPulse 策略时可产生的最大扭矩值。
仅适用于某些工具。
最大速度
工具的最大旋转速度。
下一次校准
工具的下一次校准日期。
虚拟站点
工具所连接虚拟站点的名称。
通道
工具的通道编号。
双击表中的其中一个工具可了解更多详情。
有关如何连接工具或如何进行无线配对请参见控制器手册。
一般信息
该菜单仅对支持固定式工具或手持式工具的控制器有效。
信息 | 说明 |
|---|---|
型号 | 工具型号名称。 |
序列号 | 工具序列号。 |
MAC 地址 | MAC 地址只有在工具已获得 MAC 地址时才可见。 |
产品号 | 与序号相同。 |
软件版本 | 工具软件版本编号。 |
一般工具信息由工具本身提供给控制器和 ToolsTalk 2。
限值
该菜单仅对支持固定式工具或手持式工具的控制器有效。
信息 | 说明 |
|---|---|
最大扭矩 | 工具可以针对拧紧使用的最大扭矩。 |
最大速度 | 工具的最大旋转速度。 |
最小扭矩 | 工具可以针对拧紧使用的最小扭矩。 |
齿轮比 | 输入齿轮角速度与输出齿轮角速度的比。 |
工具限值信息由工具本身提供给控制器和 ToolsTalk 2。
连接
连接到控制器和所分配的虚拟站点。
服务设置
校准
该菜单用于控制工具对应参考传感器的程度以及如何调节差异。
校准值存储在工具内存中,用于调整工具的扭矩传感器提供的扭矩值,以使正确的扭矩值能够显示在控制器上。控制器显示最后校准日期。
工具校准在控制器中执行,使用扭矩参考传感器。此过程在 Power Focus 6000 controller 手册中有描述。
输入计算出的数值,然后点击设置,新校准值即可存储在工具内存中。
参数 | 说明 |
|---|---|
上次校准日期 | 最近校准日期。 |
校准值 | 将测量和计算的值输入参数输入框。 |
下一次校准 | 下次校准的到期日。 |
设置 | 存储输入的值。 |
维护保养
工具可存储保养间隔数字并计算在执行下一次工具维护或保养之前可执行多少次拧紧。
参数 | 说明 |
|---|---|
上次保养 | 执行上次保养的日期和时间。上次保养日期在维修车间设置。上次保养日期被设为重置按钮按下时的当前日期和时间。 |
自保养以来的总拧紧次数 | 保养时的总拧紧次数是工具自第一次使用以来执行的拧紧总次数。该数值会在保养时更新,并且一直保持不变直到下一次保养为止。 |
剩余拧紧数 | 到下次保养前剩余的拧紧的总数。 |
保养间隔 | 下次保养前将要执行的拧紧次数。可以设为 10000 的倍数。 |
设置 | 该命令存储保养间隔参数输入栏中输入的数值并将该数值调整为 10000 的倍数。 |
重置保养计数器/数据 | 重置命令可重置计数器并将最后保养日期设为当前日期。 |
传感器信息
一个工具可以有一个主扭矩传感器和一个次级扭矩传感器,以及一个主角度传感器和一个次级角度传感器。每个传感器(扭矩或角度)的信息显示在此处。
信息 | 说明 |
|---|---|
已启用 | 指示传感器是否已启用。 |
齿轮比 | 传感器与工具外出轴之间的传动比。 |
饱和 | 角度传感器的饱和补偿系数。 |
信息 | 说明 |
|---|---|
已启用 | 指示传感器是否已启用。 |
序列号 | 传感器的序列号,以字符串表示。 |
货号 | 传感器的货号,以字符串表示。 |
校准值 | 传感器的校准值,以 Nm 表示。 |
运行状况
该菜单提供来自环境监测器的数据。该设备定期测量参数并存储它们。
参数 | 说明 | 值 |
|---|---|---|
刷新 | 命令按钮:读取工具值。 | |
历史 | 命令按钮: | |
工具电机温度 | 以月/日/年 时:分:秒表示的最新温度记录。 | ℃ 或 ℉ |
工具电子设备温度 | 以月/日/年 时:分:秒表示的最新温度记录。 | ℃ 或 ℉ |
零点偏移和分路限值
一个工具可以有一个主扭矩传感器和一个次级扭矩传感器。每个扭矩传感器的限值显示在此处。
信息 | 说明 |
|---|---|
分路限值 | 所测量分路校准值的最大允许值,以 % 表示。 |
分路漂移限值 | 所测量分路校准值的最大允许变化值,以 % 表示。 |
零点偏移限值 | 零点偏移补偿的最大允许值,以 % 表示。 |
零点偏移漂移限值 | 零点偏移补偿的最大允许变化值,以 % 表示。 |
使用虚拟站点选项卡
当控制器在工厂结构中选择时,虚拟站点选项卡 位于控制器菜单栏中。
虚拟站点是控制器的软件抽象概念。一个控制器内可创建多个虚拟站点。每个虚拟站点就像一个控制器。可根据需要为虚拟站点分配不同的配置。
可以选择任务、分配附件配置、分配工具、监视器、通过诊断处理收到和发出的信号以及从虚拟站点菜单设置通信协议参数。虚拟站点图标同时适用于 FlexController和 Power Focus 6000 controller。
虚拟站点概念对FlexController无效。软件架构针对两种控制器设计,因此虚拟站点出现在 FlexController界面中。
控制器特征(例如低反应拧紧策略和其他功能中的控制器范围的功能等)需要通过功能管理系统 (FMS) 分发的许可证。虽然可以在没有特定许可证的情况下配置特征,但分配和使用这些特征将需要在控制器上安装正确的许可证。有关许可证的更多详细信息,请参阅许可证 (FMS)。
虚拟站点概览
如要打开虚拟站点工作区并查看虚拟站点列表:
在工厂结构工作区
中选择一个控制器。选择菜单栏中的虚拟站点
选项卡。工作区显示控制器中的虚拟站点列表。如果未创建虚拟站点,则该列表为空。
列 | 说明 |
|---|---|
复选框 | 选择虚拟站点 |
名称 | 显示虚拟站点的名称。 |
更改人 | 哪个用户进行了更改 |
控制器更新时间 | 最后一次更新控制器的时间 |
控制器更新人 | 哪个用户更新了控制器 |
命令 | 说明 |
|---|---|
添加 | 创建一个新的虚拟站点。 |
删除 | 从列表中移除所选的虚拟站点。 |
如要访问虚拟站点配置菜单:
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
以下菜单将会显示:
菜单 | 说明 |
|---|---|
属性 | 为配置分配一个名称和描述。可选。 |
协议 | 外部通信协议的激活和配置。 |
工具 | 将工具分配给虚拟站点。 |
工具配置 | 将工具配置分配给虚拟站点。 |
现场总线映射 | 如果配置并分配给控制器,现场总线映射将会显示。该字段仅供参考。实际现场总线映射和配置在现场总线和 SoftPLC
|
任务 | 向虚拟站点分配一个任务或配置来源信号如何选择要执行的任务。 |
附件 | 分配一个附件配置和地址到附件并分配组合到一个虚拟站点。 |
常规 | 在分配常规虚拟站点时使用。 |
手动模式 | 用于配置手动模式功能。 |
许可证 | 用于为虚拟站点分配和删除许可证和功能。 |
对于 FlexController,只有属性、现场总线映射和任务菜单可用。
虚拟站点 - 属性
一个虚拟站点必须有一个名称。这可以在属性菜单中配置。默认名称为 Virtual station <index nr>。还提供可选的说明字段。
如果名称字段留空,将显示红色的错误指示符  。
。
将任务分配至虚拟站点
虚拟站点窗口中的任务菜单控制任务部分。
任务菜单用于分配任务到虚拟站点。
功能 | 说明 |
|---|---|
名称 | 当前已分配到虚拟站点的任务。 |
未分配 | 命令按钮。 从虚拟站点取消选择任何任务。 |
选择 | 命令按钮。 手动更改任务或配置外部来源以选择一个任务。选择任务弹出窗口打开以配置任务选择。 |
更改 | 命令按钮。 如果已选择任务,则选择命令按钮将替换为更改。选择更改以选择新任务。 |
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
单击工具菜单中的选择。
选择任务弹出窗口出现。
在同步模式 -> 来源或批次序列 选项卡中选择所需的任务。
点击选择。选择任务弹出窗口关闭。
关闭按钮将关闭弹出窗口,不作任何更改。
通过推送功能更新控制器。
名称字段在任务菜单中更新。
在源配置的文档中详细描述了使用源以及识别码数字和识别码字符串选择任务的任务选择。
虚拟站点 - 协议
协议菜单可以包含一个或多个已实现的通信协议及其参数设置。协议的可用性取决于 IAM 许可证。
客户特定的通信协议也在协议菜单中配置。
开放协议
配置开放协议
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
点击协议菜单中的配置。
通过虚拟站点开放协议配置开关,用户可以在虚拟站点与属于工厂控制设备的一部分的集成器之间启用或禁用开放协议通信。
选择开启或关闭以启用或禁用开放协议通信
开放协议使用控制器上的工厂以太网连接,与配置或交付拧紧结果所用的相同。
每个虚拟站点通过唯一端口号识别。对于每个使用开放协议的虚拟站点,必须在端口字段输入端口号。
旧有计数器设置对序列中所有拧紧的次数进行计数,并将该次数输出到二次系统。如要启用该设置,将使用旧有计数器设为开启。
SoftPLC 索引用于映射共享内存中要写入开放协议命令的位置。默认值为 1,但可以输入数值 1 到 6。
由于 SoftPLC 索引的默认值始终为 1,并且未检查它是否正在使用中,因此您可能已配置了系统,以便在添加虚拟站点时多次配置相同的索引。在这种情况下,Soft PLC 将无法确定传入 MID 来自哪个虚拟站点。
虚拟站点中的现场总线映射
控制器可以安装一个现场总线通信模块。该通信模块为所有虚拟站点提供服务。现场总线映射菜单显示哪些现场总线配置映射到控制器。配置现场总线,并在现场总线和 SoftPLC 中分配和映射配置
现场总线诊断
如要使用现场总线映射诊断功能:
在工厂结构工作区
中选择一个控制器。 转到虚拟站点
。工作区显示控制器中的虚拟站点列表。如果未创建虚拟站点,则该列表为空。
双击虚拟站点名称以打开现有配置,或选择添加以创建新的虚拟站点配置。
工作区显示菜单,包括映射的现场总线。
点击诊断按钮进入现场总线诊断功能。
现场总线诊断功能可以监控发送到现场总线和从现场总线接收的输入和输出信号。也可以通过强制模式来操纵信息、撰写和发送帧。现场总线诊断可从以下途径使用:
控制器图形用户界面
Web 图形用户界面
ToolsTalk
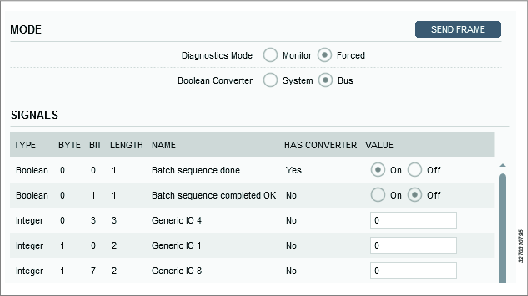
诊断模式 | 激活监控模式或强制模式。 监控模式:在监控模式下,可以查看发送到现场总线和从现场总线接收的输入和输出帧中的所有已配置字段的状态。每当收到的帧的任何位发生变化时,视图将被更新。 强制模式:当进入强制模式时,数据将冻结在其当前状态,帧被锁定。在强制模式下,可以手动激活和停用信号,或输入值并强制使用一个或多个信号。这在传入帧、传出帧或传入/传出帧时都是可能的。 |
布尔值转换器 | 在系统视图和总线视图之间切换。转换器可以反转发送到现场总线或从现场总线接收的信号。 |
类型 | 信号的类型。 |
字节 | 帧中的位置。 |
位 | 帧中的位置。 |
长度 | 帧中信号的长度。 |
名称 | 信号名称。 |
配有转换器 | 如果配置了任何转换器,配有转换器为是。 如果为是,则转换器可以用来反转信号。如果为否,则转换器不适用。 |
值 | 值列显示信号及其值的列表。输入和输出帧中每个信号的值以下列格式显示:布尔、整数或字符串,具体取决于类型。数值可在强制模式中编辑。可更改同一个帧内的一个信号、几个信号或所有信号。 更改数值之后,点击发送帧按钮将新的帧推送到控制器并应用新值。 当离开诊断模式时,所有值都将返回到上一个保存的进入和输出信号帧。 |
一次只能启用一个诊断会话。如果诊断已被使用,屏幕上会显示信息消息。
将附件分配至虚拟站点
该菜单仅对支持手持式工具的控制器有效。
控制器可以通过 CAN 总线连接多个附件。每个附件必须在总线上有一个 1-15 范围内的唯一地址。可分配多个附件到虚拟站点。
在可以将配件分配到虚拟站点之前,配件必须被分配一个配件配置。
如要查看当前对虚拟站点的附件分配:
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
功能 | 说明 |
|---|---|
复选框 | 选择可从虚拟站点取消分配的附件配置。 |
名称 | 分配给附件的配置名称。 |
类型 | 附件类型。 |
CAN 节点 | 附件的 CAN 地址。 |
序列号 | 附件的序列号。 |
状态 | 可以是:
|
CAN 节点列显示所使用的当新的附件连接时不能使用的地址。套筒选择器的分配可以包含多个地址。
对于套筒选择器而言,CAN 节点的顺序很重要。第一个套筒选择器中的最低位置是分配中的第一个位置。
功能 | 说明 |
|---|---|
未分配 | 选定的配件已从虚拟站点取消分配。附件与控制器保持连接。 |
选择 | 添加新附件。附件弹出窗口打开。 |
诊断 | 监控 I/O 信号的行为和将控制器内部逻辑与附件之间的信号强制给所需状态的可能性。 |
向虚拟站点添加一个附件
所选附件必须具有唯一且有效的 CAN 总线地址。附件配置分配到附件,附件分配到虚拟站点。
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
如要将附件分配给虚拟站点:
单击附件菜单中的选择按钮以打开附件弹出窗口。
从一个选项卡中选择附件类型。
内部 I/O
套筒选择器
I/O 扩展模块
操作面板
排灯
扫码枪
指示灯盒
选中
以选择配置列表中的配置。选中
以选择可用 CAN 节点列表中的地址。单击选择按钮然后添加其中一个附件选项。
对于待分配到虚拟站点的每个附件重复该程序。
单击取消按钮关闭弹出窗口。
附件菜单更新,显示新分配的配置。
附件地址通过附件上的旋转开关设置。请参阅详细的附件产品信息文件。附件地址范围是从 1 至 15。
从虚拟站点取消分配附件
要取消分配附件配置并删除与虚拟站点的连接,请执行以下步骤:
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
选中附件菜单中要取消分配的附件配置的复选框。
选择附件菜单中的取消分配命令按钮。
如要更新控制器以及任何更改,请选择推送更改命令按钮
。
附件菜单中的列表将被更新。
分配常规虚拟站点配置
导航到虚拟站点配置
在工厂结构工作区
中选择一个控制器。 选择虚拟站点选项卡
。虚拟站点概览显示所选控制器的虚拟站点列表。如果未创建虚拟站点,则该列表为空。双击虚拟站点以打开现有配置,或点击添加以创建新的虚拟站点配置。
将常规配置分配给虚拟站点
在虚拟站点配置工作区中,转到常规区。
选择更改。在弹出窗口中:所列的常规配置为配置
中添加的配置。选择其中一个常规配置,然后选择更改按钮。
常规菜单将会更新到所选的常规配置。
只有未分配的常规虚拟站点配置才能被删除。
使用控制器信息选项卡
控制器信息  选项卡中的菜单提供有关一个所选控制器的信息。
选项卡中的菜单提供有关一个所选控制器的信息。
查看控制器信息菜单:
在工厂结构工作区
中选择一个控制器。转到控制器
选项卡。工作区显示控制器菜单。
在控制器工作区,显示下列菜单:
菜单 | 功能 |
|---|---|
控制器信息 | 提供有关控制器和 IAM 模块的一般信息。 |
许可证 | 提供有关已分配给控制器的不同许可证类型的信息。 |
软件 | 提供有关控制器软件配置的信息。 |
硬件 | 提供有关 PF6 控制器硬件配置的信息。 |
导出/导入 | 提供控制器结果和配置的导出,以及控制器配置的导入。一个有关文件位置的对话框将会出现。 |
运行状况 | 监测并记录环境参数以及系统运行状况参数。 |
所显示的信息仅供参考。菜单中不可设置参数。
控制器信息和 IAM 菜单
智能应用模块 (IAM) 位于控制器门的内侧。其中包含控制器程序、配置参数以及已存储的结果。
可以轻松移除 IAM 模块并将其移入其他控制器内,该控制器接下来的行为将与前一个控制器完全相同。
查看控制器信息菜单和当前配置
在工厂结构
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
菜单 | 功能 |
|---|---|
型号 | 提供有关控制器型号的一般信息。 |
序列号 | 提供有关控制器序列号的信息。 |
服务以太网端口 | 提供有关服务端口 IP 地址的信息。通过此端口,服务工程师可以访问控制器而不连接到工厂网络。 |
菜单 | 功能 |
|---|---|
类型 | Atlas Copco 提供了多种不同类型的 IAM,每种类型都具有不同的功能。 |
客户关键字 | 特定于应用程序或特定于客户的配置的识别码。 |
序列号 | 提供有关 IAM 模块序列号的信息。 |
软件菜单
在工厂结构工作区
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
菜单 | 功能 |
|---|---|
当前版本 | 启用的主要工作软件。 |
存储的版本 | 存储的未启用软件。 |
可以在已安装的软件版本之间切换,这有两个好处:
可以在正常操作期间将控制器软件加载到控制器。如果要更新多个控制器,可以非常快速地同时在所有控制器之间进行切换。
如果软件升级时产生了意外结果,可以切换到之前的版本以快速备份修复。
硬件配置
此菜单提供有关系统硬件配置的信息。
在工厂结构工作区
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
硬件菜单列出了组成控制器的不同硬件模块。
为每个模块提供以下数据:
序列号
货号
软件版本
导出和导入
导出和导入功能用于在结果菜单中导出事件和拧紧结果,以供在外部程序中进行分析,以及能够在控制器之间传送拧紧程序、批次和控制器配置。
导出命令可用于下列原因:
导出拧紧结果和事件用于进一步处理。
导出日志文件,以用作 Atlas Copco 服务工程师的调试援助。
导出可用于将配置复制到另一个控制器的完整控制器配置。
比较两个导出的配置以查看差异。
在工厂结构
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
点击导出按钮以导出以下其中的一项:
参数
说明
导出
导出所有控制器信息。
导出配置
导出设置和配置。
导出工具日志
从已连接的工具导出日志(拧紧和硬件信息)。适用于 SRB、TBP 和 STB。
导出包含 atlas_tool_i.zip 和 ExportInfo.txt
选择保存导出文件的位置,然后点击确定。
在工厂结构
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
如要导入控制器配置,请点击导入命令按钮。
点击打开文件。选择要导入的文件。
导入文件必须为之前导出的文件。
在使用导入功能时,拧紧程序、批次、附件和控制器的所有设置都将更新为导入文件的设置。但是,不会导入网络、PIN 以及结果和事件的设置。
系统运行状况监控器
设备运行状况监控器定期测量参数并存储它们。
在工厂结构工作区
中选择一个控制器。转到控制器
。工作区显示控制器菜单。
运行状况菜单显示环境数据和系统运行状况信息。
信息 | 值 | 说明 |
|---|---|---|
刷新命令按钮 | ℃ 或 ℉ | 读取来自控制器的信息并显示最新结果。 |
控制器温度 | ℃ 或 ℉ | 以月/日/年 时:分:秒表示的最新温度记录。 |
电池状态 | OK 或 NOK。 | 监控控制器电脑板中的内存和实时时钟电池。 状态消息 NOK 意味着电池需要尽快更换,以避免数据丢失或错误的结果。 以月/日/年 时:分:秒表示的最新录音。 |
历史记录命令按钮 | 提供监控器读数列表。 |
使用设置选项卡
首选项
设置菜单包括首选项部分,用户可以在此处选择控制器界面的语言、扭矩单位和 PIN 保护。
如要设置控制器首选项:
在工厂结构
中选择一个控制器。 转到设置
 。
。工作区显示设置菜单。
控制器首选项参数:
参数 | 说明 | 默认 |
|---|---|---|
扭矩单位 | 选择在控制器图形用户界面或 web 图形用户界面中为该控制器显示扭矩测量结果的单位。 | Nm |
温度单位 | 选择在控制器图形用户界面或 web 图形用户界面中为该控制器显示温度测量结果的单位。 | °C |
语言 | 选择在控制器图形用户界面或 web 图形用户界面中为此控制器显示的语言。 | 英语 |
通过工厂端口访问 | 开启/关闭。启用(打开)或禁用(关闭)与控制器的通信。 | 开启 |
使用 PIN | 通过控制器图形用户界面或 webHMI(工厂网络)进行访问时,可以为此控制器启用 PIN。 PIN 仅适用于通过其图形用户界面或 webHMI 访问控制器的用户。由于激活了 PIN,因此用户没有被锁定在 ToolsTalk 2 或从 ToolsTalk 2 进行控制器的操作(配置和推送配置)。 开启:访问控制器的用户必须使用 PIN 码才能获得对控制器的写访问权限。 关闭:用户无需 PIN 码即可访问控制器的写权限。 | 关闭 |
使用 PIN 作为服务端口 | 通过服务端口访问时,可以为控制器启用 PIN。 开启:访问控制器的用户必须使用 PIN 码才能获得对控制器的写访问权限。 关闭:用户无需 PIN 码即可访问控制器的写权限。
| 关闭 |
PIN 代码 | 为每个添加的用户选择一个 4 位 PIN 码。启用/禁用用户 PIN。 | |
停机超时 | 控制器图形用户界面或 web 图形用户界面在活动超时后自动锁定。 | 120 s |
PIN 设置
使用 PIN 可防止未授权使用或意外改动控制器。可以将最多 10 个用户添加到控制器,每个用户设有独立的 PIN。注意:PIN 未与控制器配置关联,主要用于登录原因。
当对 PIN 进行更改或在控制器图形用户界面或 WebHMI 上进行了任何更改时,将记录进行更改的用户。这将显示在外部更改通知窗口的更改人列中,并添加到更改历史记录中。
激活 PIN 后,在通过以下方式访问控制器时需要提供 PIN 码:
控制器图形用户界面
Web 图形用户界面
激活 PIN
转到设置菜单,将使用 PIN 设为开启。
选择PIN 码。
为新用户添加 PIN 码
在 PIN 码对话窗口中选择添加。
在名称字段中输入用户名。
选择设置 PIN 为用户设置 PIN。PIN 必须为 0000–9999 范围内的四位数。
在打开的设置 PIN 对话窗口中,两个字段(设置 PIN 和重复 PIN)中的 PIN 需要匹配。
选择确定。
在用户列表中,选择您希望启用的用户名右侧之复选框。
当启用 PIN 时,控制器将在配置的不活动时间后自动锁定。
要停用 PIN,清空您希望停用的用户名右侧的复选框。
删除用户/PIN
在用户列表中,勾选要删除的每个用户 PIN 的复选框,然后选择删除按钮。
在 PIN 锁定时访问控制器
在访问启用 PIN 的控制器时,会弹出一条要求提供 PIN 的提示信息。无论是通过 WEB GUI 还是控制器 GUI 访问控制器,均要求提供 PIN 码。
工具保养警报
设置菜单包含工具部分,用于为保养指示符报警和显示校准报警选择工具报警
如要设置工具报警:
在工厂结构
中选择一个控制器。 转到设置
。工作区显示设置菜单。
参数 | 说明 | 默认 | 位置 |
|---|---|---|---|
保养指示灯警报 | 在开关中选择。 打开或关闭报警。当保养间隔到期时,报警被触发。 | 关闭 | |
显示标定警报 | 在开关中选择。 如果没有在指定时间内校准工具,则将触发校准报警。可以在工具菜单中查看上次校准日期。默认间隔为一年,但可以从控制器图形用户界面或 web 图形用户界面更改。 | 关闭 |
服务器连接
控制器与 ToolsNet 服务器进行通信
控制器始终将拧紧结果发送到ToolsTalk 2。控制器还可以将结果发送到 ToolsNet 8 进行进一步处理。必须在控制器中配置 ToolsNet 8 服务器的地址。
如要设置控制器和 ToolsNet 服务器之间的通信:
在工厂结构
中选择一个控制器。转到设置
。工作区显示设置菜单。
转到 ToolsNet,启用或禁用与 ToolsNet 服务器的通信。
如果通信启用,请设置服务器的 IP 地址和端口号。
参数 | 说明 | 默认 | 注释 |
|---|---|---|---|
ToolsNet 已启用 | 启用/禁用与服务器的通信。 | 关闭 | |
服务器主机 | ToolsNet 服务器 IP 地址。 |
| 通信启用。 |
服务器端口 | ToolsNet 服务器端口。 |
| 通信启用。 |
控制器日期和时间
每个控制器的时间和日期必须编程以便准确报告。
在工厂结构工作区
中选择一个控制器。前往设置选项卡。
工作区显示常规设置菜单。
选择时间参考的来源。
输入其他参数,具体取决于所选的时间来源。
从时区快捷菜单中选择控制器本地时区。
为了实现最佳的时间精度和稳定性,建议使用可与所有控制器通信的 NTP 服务器。
时间来源从快捷菜单中选择,可以是以下之一:
向控制器手动输入时间和日期。这可以通过所有图形用户界面完成。
使用标准化网络时间协议 (NTP)。服务器将时间参考分发给连接的控制器。最多可以配置两个不同的 NTP 服务器。
如果控制器已连接并联机到 ToolsNet 服务器,使用 ToolsNet 服务器作为时间参考。当使用 ToolsNet 作为时间参考时,重要的是将服务器和控制器设为相同的时区,即使它们在不同的时区。
如要添加和配置日期和时间:
参数 | 条件 | 说明 |
|---|---|---|
来源 | 从快捷菜单进行选择。 选择配置控制器时间和日期的方法。 | |
时间区 | 从快捷菜单进行选择。 选择控制器所在的时区。 | |
时间 | 来源 = 手动 | 以时:分:秒的格式输入时间。 |
日期 | 来源 = 手动 | 从日历符号输入日期。 |
设置命令按钮 | 来源 = 手动 | 将输入的日期和时间发送到控制器。为了能够执行此命令,控制器必须联机。 |
添加命令按钮 | 来源 = NTP | 添加其他 NTP 服务器地址。 |
删除命令按钮 | 来源 = NTP | 删除所选的 NTP 服务器地址。 |
NTP 服务器 | 来源 = NTP | 输入 NTP 服务器的 IP 地址。 |
事件菜单
事件是指向操作员报告的操作状态和其他信息,例如错误。所有事件均可以配置并且可以有不同的严重性。
事件类型 | 功能 |
|---|---|
Display | 事件可以提供信息并在控制器屏幕上显示一会儿。 |
日志 | 事件可以提供信息并在控制器屏幕上显示一会儿,它也将被写入日志文件。这些将显示在事件 |
确认 | 必须由操作员确认的事件。如要确认事件,操作员必须按附件上的按钮,点击控制器触摸屏或通过 web 图形用户界面确认事件。 |
事件配置确定每个事件信号的处理方式。
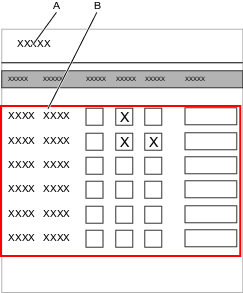
A | 事件搜索窗口 | B | 事件列表 |
参考一章中列出了所有可用的事件。事件分为两个类别:
标准事件由 Atlas Copco 定义,将在每一次交付中提供。
自定义事件由 Atlas Copco 根据客户请求实施,仅对于特定客户有效并提供。
事件配置
在工厂结构工作区
中选择一个控制器。转到设置
选项卡,然后选择事件。使用搜索窗口搜索特定事件,或者通过选择它们并在事件中滚动以找到所需的事件代码来展开这些部分。
选择或取消选择以下一项或多项:
确认,如果事件待显示并待操作员确认。
日志,如果事件待显示,写入日志文件并在事件
 选项卡中显示。
选项卡中显示。
显示,如果事件要显示在屏幕上。
详细信息字段可用于写入客户特定的注释。
就绪时,将更改推送到特定控制器。
为每个要配置的控制器重复步骤 3-5。
事件代号 0000-7999 为标准事件。
事件代号 8000-9999 为客户特定事件。
添加事件至库
选择设置
,然后在事件配置选项卡中选择管理。从下拉列表中选择添加至库。创建全局配置对话窗口打开,包含两个配置选项:
自动还原,设为默认。
取消链接
选择创建,事件配置将被锁定并出现在全局事件库中。
措施 | 结果 |
|---|---|
自动还原 | 如果程序在 ToolsTalk 2 中被标记为全局事件,则通过控制器图形用户界面或 web 图形用户界面更新事件将被忽略。 进行更新并发送回 ToolsTalk 2,其中更改已被识别但未被确认。原始全局事件程序立即被推送回控制器。 |
取消链接 | 通过控制器图形用户界面或 web 图形用户界面更新事件将导致受影响的控制器中的程序从全局事件切换为本地事件。 进行更新并发送到 ToolsTalk 2,其中更改已被识别。因此,事件将立即从控制器分发列表中移除。 |
当配置全局事件用于分发到控制器时,必须选择自动还原或取消链接。选择在后期无法更改。
使用现场总线、SoftPLC 和非循环数据选项卡
当已在工厂结构
中选择一个单一控制器时,现场总线、非循环和 SoftPLC 位于现场总线和 SoftPLC
选项卡中。
现场总线是工厂管理系统(现场总线主站)和远程节点(现场总线从站)之间的通信链路。
现场总线和 SoftPLC 分为四个部分:
概览
现场总线
SoftPLC
非循环
现场总线概述
当与控制器通信时,使用现场总线通信的典型工厂管理控制系统可能如下图所示。
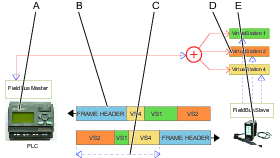
A | 现场总线主站 (PLC) | B | 帧头 |
C | 过程数据帧内的多个虚拟站点接收和发送的用户数据 | D | 虚拟站点 |
E | 具有多个虚拟站点的控制器 |
现场总线主站(通常为 PLC)与许多远程节点(称为现场总线从站)交换信息。主站每次与一个从站通信。主机将帧发送到从站并接收另一个帧作为响应。
PLC 将数据传输到 Anybus 模块,然后再与可能包含识别数据、任务选择信息和其他信号的控制器通信。
控制器通过 Anybus 模块将响应发送到 PLC,其中可能包含事件信号、状态信号、拧紧结果和其他信号。
过程数据的更新频率可能不同。控制器与 Anybus 模块之间的更新频率约为 100Hz,Anybus 模块与 PLC 之间的更新频率约为 500Hz。
物理传输链路取决于所选的现场总线类型。传输由包含地址信息的帧头和包含所有数据的过程数据帧组成。
如果控制器支持虚拟站点,将正确的信息导向每个虚拟站点非常重要。过程数据帧可能包含一个或多个现场总线映射,每个虚拟站点各一个。
现场总线配置参数
通过定义最低有效位的位置将项目放入现场总线映射中。该位置由字节数和位数来标识。
信息 | 说明 |
|---|---|
开始字节 | 项目最低有效位置的字节数。一个数字,介于从零到最大容量减去一的范围内。 编号从零 (0) 开始。最低有效字节或位为数字 0。 |
开始位 | 项目最低有效位所在的位数。从先前选择的起始字节开始。数字范围从 0 到 7。 编号从零 (0) 开始。最低有效字节或位为数字 0。 |
长度 | 数值代表项目中的位数。 |
系列 | 仅供参考。提供所选项目的最小长度、最大长度和默认长度信息。 |
变换器 | 可用信号转换器的下拉列表。如果 SoftPLC 对如何以数字格式表示项目有任何要求,则使用这种方法。 |
项目转换器用于在不同数据类型之间转换项目。
信息 | 说明 |
|---|---|
布尔反演 | 将数字信号从高态有效 (1) 反转为低态有效 (0)。 |
固定点 |
|
现场总线定义
项目为数字信号。比如,它可以是控制器参考部分所述的信号:
单位信息,比如拧紧 OK。
多位信息,比如事件代码。
项目可以是代表计数器值、识别码数字或拧紧结果的多位信息。
项目可以是一串字符。
信息 | 说明 |
|---|---|
现场总线项目 | 布尔值: 信号可以是一个简单的布尔值表达,占用一个位的位置。 数字 I/O 信号就是一个例子。 |
整数: 数据占用阵列中一个或多个数据位。 | |
字符或字符串: 信号可以是一个字母数字字符串,占据一个或多个字节位置。 |
信息 | 说明 |
|---|---|
现场总线映射 | 数据阵列。大小必须为偶数字节。现场总线映射在现场总线菜单中的现场总线窗口中创建。现场总线项目放置在现场总线映射中,以便为主从通信创建一个唯一的阵列。通过定义起始位置和长度(以位数表示)将项目放入阵列中。 |
过程数据帧 | 数据阵列。大小必须为偶数字节。处理数据帧在现场总线菜单中的现场总线窗口中创建。当被分配到虚拟站点时,现场总线映射被放进过程数据帧内。帧内的映射位置由偏差定义,它从帧的开始处计算。 |
现场总线配置 | 现场总线映射配置在现场总线菜单中的现场总线窗口中完成。配置参数由常用参数和特定于类型的参数组成。 参数输入框列表在现场总线类型被选择后显示。 |
信息 | 说明 |
|---|---|
偏移 | 指针变量。信号可以是一个简单的布尔值表达,占用一个位的位置。 数字 I/O 信号就是一个例子。 |
开始字节 | 指针变量。指向包含项目的 LSB 的现场总线映射内的一个字节。 |
开始位 | 指针变量。指向之前在包含项目 LSB 的现场总线映射内定义的字节中的位。 |
项目长度 | 以许多位表示的大小变量。 |
LSB | 最低有效位或字节。 |
名称 | 说明 |
|---|---|
现场总线传输 | 通过网络发送的数据报。发送节点将包含地址信息的帧头与发送到网络的过程数据帧组合在一起。接收节点检测其帧头中的地址并检索过程数据帧。 |
帧头 | 为确保通过网络进行无误传输的网络地址信息和其他数据。 |
现场总线主站 | 通常为向现场总线从站发起通信的 PLC。主站传输数据帧并接收来自从站的另一个帧。 |
现场总线从站 | 响应来自现场总线主站的传输的远程节点。当从站检测到传输时,其接收到一个帧,并通过发送另一个帧来响应发送者。 |
现场总线数据类型
每个现场总线在通过总线传输的数据量方面都有其自己的容量。
循环数据:循环数据(也称为“隐式”或“基本”数据)通常是 PLC 数据/过程数据,例如开始、停止、OK、NOK 信号等。主站和控制器现场总线之间会定期(例如 100ms)进行循环数据传输,并且由于其中包含对操作至关重要的命令,因此必须尽可能频繁地进行更新。
非循环数据:非循环数据(也称为“信息”)通常是拧紧数据。非循环数据不在循环数据现场总线映射中,非循环数据传输仅在从主站到控制器现场总线的请求下发生。
异步数据:异步数据是拧紧数据,它是循环数据传输的一部分,也是映射的一部分,适用于不支持非循环数据的那些现场总线类型(CC 链路)。可以使用异步数据功能,以便通过现场总线将拧紧结果和循环数据打包发送到 PLC。然后,PLC 将所有数据包合并为一个拧紧结果。来自控制器的异步数据与 I/O 信号来自 PF 的现场总线异步数据进行通信,并通过 I/O 信号到 PF 的现场总线异步数据与控制器进行通信。这些信号用于异步数据握手,与非循环数据进行的握手类型相同。可以将来自 PF 的现场总线异步数据的大小视为实例大小或记录大小,并指示为每个异步数据握手请求传输多少字节的数据。
例如,如果总的非循环数据配置为 1024 字节,并且到 PF 的现场总线异步数据 设置为 64 字节,则总异步数据将发送 16 次,每次 64 字节。即,对于来自 PLC 的每个请求,控制器使用总异步数据中接下来的 64 字节的数据填补到 PF 的现场总线异步数据。
从理论上讲,如果将来自 PF 的现场总线异步数据定义为 2 个字节长,则最多可以发送 32K 字节数据(这将需要 16K 数据请求)。
现场总线大小
项目 | DeviceNet | 以太网/IP | Profinet I/O | Profibus DP-V1a | CC 链路 | CC 链接 IE | |
|---|---|---|---|---|---|---|---|
a 仅适用于 Profibus DP-V1:非周期性数据的传输速度约为 1 kB/s,取决于触发拧紧的频率,这将成为您可以传输多少非周期性数据的瓶颈。例如,如果您每 3 秒执行一次拧紧操作,则不应尝试传输超过 3 kB/拧紧 | |||||||
最大循环数据(读+写) | 512 | 512 | 512 | 128(368) | 不适用 | 512 | |
最小循环数据(读+写) | 0 | 0 | 0 | 1 | 不适用 | 0 | |
最大循环数据(写) | 256 | 256 | 256 | 128(244) | 不适用 | 256 | |
最小循环数据(写) | 0 | 0 | 0 | 0 | 不适用 | 0 | |
最大循环数据(读) | 256 | 256 | 256 | 128(244) | 不适用 | 256 | |
最小循环数据(读) | 0 | 0 | 0 | 0 | 不适用 | 0 | |
最大非循环数据(读+写) | 65535 | 65535 | 65535 | 65535 | 不适用 | 65535 | |
最小非循环数据(读+写) | 0 | 0 | 0 | 0 | 不适用 | 0 | |
最大非循环数据(写) | 65535 | 65535 | 65535 | 65535 | 不适用 | 65535 | |
最小非循环数据(写) | 0 | 0 | 0 | 0 | 不适用 | 0 | |
最大非循环数据(读) | 65535 | 65535 | 65535 | 65535 | 不适用 | 65535 | |
最小非循环数据(读) | 0 | 0 | 0 | 0 | 不适用 | 0 | |
CC 链路版本 1
已占用站点 | 位点(位) | 字点(字) | 总计(位+字,以字节为单位) |
|---|---|---|---|
1 | 32 | 4 | 12 |
2 | 64 | 8 | 24 |
3 | 96 | 12 | 36 |
4 | 128 | 16 | 48 |
CC 链路版本 2
已占用站点 | 1 个扩展周期 | 2 个扩展周期 | 4 个扩展周期 | 8 个扩展周期 | ||||
点 | 总数 | 点 | 总数 | 点 | 总数 | 点 | 点 | |
1 | 32 位 | 12 字节 | 32 位 | 20 字节 | 64 位 | 40 字节 | 128 位 | 80 字节 |
4 个字 | 8 个字 | 16 个字 | 32 个字 | |||||
2 | 64 位 | 24 字节 | 96 位 | 44 字节 | 192 位 | 88 字节 | 384 位 | 176 字节 |
8 个字 | 16 个字 | 32 个字 | 64 个字 | |||||
3 | 96 位 | 36 字节 | 160 位 | 68 字节 | 320 位 | 136 字节 | 640 位 | 272 字节 |
12 个字 | 24 个字 | 48 个字 | 96 个字 | |||||
4 | 128 位 | 48 字节 | 224 位 | 92 字节 | 448 位 | 184 字节 | 896 位 | 368 字节 |
16 个字 | 32 个字 | 64 个字 | 128 个字 | |||||
概览配置选项卡
现场总线设置
连接状态可显示以下状态消息:
状态 | 说明 |
|---|---|
Fieldbus_Online | 现场总线模块在线。控制器和现场总线主站之间的通信处于活动状态。 |
Fieldbus_Offline | 现场总线模块离线。控制器和现场总线主站之间的通信未处于活动状态。 |
Fieldbus_NoModuleInstalled | 控制器中未检测到现场总线模块。 |
Fieldbus_NotConfigured | 在控制器中检测到现场总线模块,但该模块未配置。 |
Fieldbus_Initializing | 复位期间的现场总线状态或作为全局参数更改后的结果。这是显示稳定状态之前的一个临时状态。 |
现场总线状态也可能显示错误:
错误代码 | 说明 | 措施 |
|---|---|---|
Fieldbus_ModuleMismatch | 支持的模块。检测到参数不匹配。 | 联系 Atlas Copco 阅读错误日志。 |
Fieldbus_UnsupportedModuleInstalled | 不支持的现场总线模块。 | 联系 Atlas Copco 阅读错误日志。 |
Fieldbus_ConfiguredModuleNot Installed | 配置数据已创建。未检测到模块。 | 联系 Atlas Copco 阅读错误日志。 |
Fieldbus_Unexpectedconfigurationerror | 控制器与 ToolsTalk 2之间不匹配。 | 联系 Atlas Copco 阅读错误日志。 |
更改一些全局参数(比如帧大小、现场总线模块地址)将导致现场总线模块复位。
在工厂结构工作区
中选择一个控制器。在菜单栏选择现场总线和 SoftPLC
,然后选择概览子选项卡。在现场总线设置中,从下拉菜单选择现场总线类型。
输入接收和发送方向的整个帧大小的字节大小。该值必须是一个偶数整数。
输入现场总线类型的具体参数。
现场总线常规参数
区域 | 说明 | 默认值 |
|---|---|---|
现场总线类型 | 从下拉菜单中选择现场总线类型:
| 未定义 |
更新周期 | 设置过程数据帧的发送频率。该值以毫秒表示。最小值为100 ms。 |
|
在现场总线脱机时锁止工具 | 选择开关开启-关闭。当现场总线模块与现场总线主站 (PLC) 通信失败时,确定控制器将采取的动作。 | 关闭 |
读取结果握手 | 选择开关开启-关闭。当开启时,设置将影响所有虚拟站点。读取结果握手信号必须映射在现场总线配置中。 当没有结果待确认时产生的任何结果将立即发送给 PLC。 待确认的结果将被放入队列中,确认后将被清除,然后发送队列中的下一个结果。清除的结果与队列中的下一个结果之间的时间取决于现场总线常规设置中设置的现场总线循环时间。如果设置被更改,或者虚拟站点的现场总线映射发生更改,则队列中的结果将被刷新,且不会发送到 PLC。 | 关闭 |
通过网络进行设置 | 选择开关开启-关闭。确定现场总线模块通信的配置方式。
| 关闭 |
同步选中的任务 | 关闭 | |
字节顺序循环数据 | 选择用于循环数据的字节顺序:
| 通过网络进行设置 |
字节顺序非循环数据 | 选择用于非循环数据的字节顺序:
| Motorola(大字节) |
自动加载异步数据 | 选择开关开启-关闭。当开启时,将自动加载第一个也是唯一的异步数据包。 启用该功能后,现场总线主站必须确保开始新的循环之前已完成读取数据。 | 关闭 |
在没有握手协议的情况下配置拧紧结果
使用每个主轴的最终角度和最终扭矩配置非循环配置。
使用来自控制器的信号“从控制器现场总线异步数据”(在“从控制器”选项卡中)配置现场总线配置。
将现场总线配置和非循环配置映射到虚拟站点。
在常规现场总线配置中,选择自动加载异步数据 = 打开。
拧紧后,用户可以在“从控制器现场总线异步数据”信号中获得结果。
DeviceNet 现场总线参数
下表仅列出 DeviceNet 的特定参数。有关常规参数,请参见现场总线常规参数。
区域 | 说明 | 默认值 |
|---|---|---|
现场总线节点地址 |
|
|
波特率 | 通信链路的速度。从下拉菜单中选择速度。 125 kbps; 250 kbps; 500 kbps,自动。 | 自动 |
连接模式 | 选择现场总线主站 (PLC) 与从属控制器之间的通信类型。从下拉菜单中选择:
|
|
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
EtherNet/IP 现场总线参数
下表仅列出 EtherNet/IP 的特定参数。有关常规参数,请参见现场总线常规参数。
区域 | 说明 | 默认值 |
|---|---|---|
现场总线节点 IP 地址 | 格式为 0.0.0.0 |
|
子网掩码 | 格式为 0.0.0.0 |
|
网关 | 格式为 0.0.0.0 |
|
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
ProfinetIO 现场总线参数
下表仅列出 ProfinetIO 的特定参数。有关常规参数,请参见现场总线常规参数。
字段 | 说明 | 默认值 |
|---|---|---|
设备名称 | 设备名称 | |
现场总线节点 IP 地址 | 格式为 0.0.0.0 |
|
子网掩码 | 格式为 0.0.0.0 |
|
网关 | 格式为 0.0.0.0 |
|
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
参数设备名称识别 PROFINET 上的现场总线模块,并使用 RFC 5890 中描述的语法。
Profibus 现场总线参数
下表仅列出了 Profibus 的特定参数。有关常规参数,请参见现场总线常规参数。
区域 | 说明 | 默认值 |
|---|---|---|
同步选中的任务 | 如果启用,现场总线框架应在任务更改时重新同步 | |
扩展模式 | 在向后兼容 152 字节数据模式和 368 字节数据模式之间选择:
| |
现场总线节点地址 |
|
|
最大 ADI 尺寸 | 在要设置为最大的不同应用程序数据实例尺寸之间进行选择。 仅对于在单个 ADI 上映射的数据保证数据一致性,即,如果要发送的数据较大,或者在两个 ADI 上被破坏,则不能保证数据一致性。设置最大 ADI 尺寸(等于发送的数据类型尺寸和正确映射到总帧的尺寸)将保证数据的一致性。 用于发送循环数据的最大数据尺寸,必须与现场总线主站中使用的数据尺寸匹配。将使用最大尺寸的 ADI,直到小于要映射的尺寸为止。例如,如果将最大 ADI 尺寸设置为 8 个字节,则它将被用于映射,直到剩余少于 8 个字节为止,然后将使用 4、2、1 个字节来传输其余数据。 | |
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
CC 链路现场总线参数
下表仅列出了 CC Link 的特定参数。有关常规参数,请参见现场总线常规参数。
区域 | 说明 | 默认值 |
|---|---|---|
波特率 | 通信链路的速度。从下拉菜单中选择速度。 156 kbps;625 kbps;2500 kbps;5 Mbps;10 Mbps。 | 156 kbps |
现场总线节点地址 | 网络中每个独立单元的唯一地址 | |
版本 | 版本 1:默认情况下,模块根据映射的过程数据自动计算所需的已占用站点数量。 版本 2:通过在 CC-Link 中实施网络设置,可以自定义 CC-Link 版本 2 的实施,并在扩展周期中使用较大的数据尺寸。 | |
已占用站点 | 参数设置取决于选择的版本。它与扩展周期参数结合使用。 | |
扩展周期 | 用于发送较大数据大小的参数设置,与版本和已占用站点参数结合使用。 | |
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
CC 链路 IE 现场总线参数
下表仅列出了 CC Link IE 的特定参数。有关常规参数,请参见现场总线常规参数。
区域 | 说明 | 默认值 |
|---|---|---|
工作站号 | 必须为网络上的每台设备分配一个唯一的站点编号。 | |
网络编号 | 网络可以分成几个部分,每个部分都有一个用于寻址的唯一网络编号。 | |
至控制器 | 接收过程数据帧合计。帧大小是所有虚拟站点接收帧的组合。大小以字节数表示。 | |
源自控制器 | 发送过程数据帧合计。帧大小是所有虚拟站点发送帧的组合。大小以字节数表示。 |
一般现场总线设置中的非循环数据
添加数据实例大小
在现场总线设置中,用户可以设置数据实例大小,这是用于大小范围计算的一般值。实例定义应在何处读取非循环数据的第一个字节。
这仅适用于以下现场总线类型:
以太网 IP
DeviceNet
Profinet IO
现场现场总线
CC 链路 IE
在工厂结构
中选择一个控制器。 转到现场总线和 SoftPLC 选项卡
。选择概述子选项卡。
在数据实例大小字段中输入值。
数据实例大小的值定义实例应该有多大。这对于使用虚拟站点映射的非循环现场总线中的所有实例都是通用的。默认:64,最大值:255(256 字节)。
CC 链接的大小范围计算是自动完成的。
删除非循环现场总线映射
在虚拟站点映射配置区域中选择来自控制器的非循环选项卡。
选中需要删除的现场总线映射的复选框,然后选择删除。
SoftPLC 设置
尺寸
可以在至控制器和从控制器字段中设置现场总线分配给 PLC 的入站和出站尺寸。
如果未配置 PLC 的现场总线,则对于入站和出站尺寸,帧尺寸将显示 0。
偏移
可以手动更改现场总线映射之间的顺序,并且可以控制现场总线映射之间的间距。这两个功能均由偏移参数控制。该值定义了过程数据帧阵列中现场总线映射的起始位置。
更改偏移
在至控制器部分,输入过程数据帧内的现场总线映射的偏移。
在从控制器部分,输入过程数据帧内的现场总线映射的偏移。
系统会自动执行验证。如果新的偏移值被接受,则以黑色文本显示。如果不接受该值,错误消息将以红色文本显示,它指出违反了哪些偏移规则。
起始地址必须是偶数。
虚拟站点映射配置
控制器中的虚拟站与现场总线主站之间通过交换彼此之间的现场总线映射来进行通信。
一个或多个现场总线映射组合成一个过程数据帧,该帧在控制器与现场总线主站之间的物理通信链路上发送。
列 | 功能 |
|---|---|
复选框 | 选择或取消选择映射。 |
虚拟站点 | 虚拟站点名称。 |
现场总线配置 | 现场总线映射。 |
至/从控制器偏移 | 过程数据帧内的现场总线映射的起点。 |
列 | 功能 |
|---|---|
复选框 | 选择或取消选择映射。 |
虚拟站点 | 虚拟站点名称。 |
非循环配置 | 非循环数据映射。 |
开始实例 | 非循环数据的第一个实例数字。默认/最小实例数字:2048。 |
结束实例 | 非循环数据的最后一个实例数字。最大实例数字:65535。 实例的最大大小在不同的现场总线类型之间有所不同。 |
实例数 | 发送非循环数据所需的实例数。例如,如果数据实例大小设置为 64,开始实例为 2048,结束实例为 2060,则实例数为 13,非循环配置的最大大小将为 832 个字节。根据开始实例和结束实例自动生成实例数。 |
大小(字节) | 基于所选的数据实例大小、开始实例和结束实例的非循环配置的最大大小。 |
非循环数据的总大小不应超过 65536 字节。
虚拟站点只能映射一个非循环现场总线配置,但非循环现场总线配置可以映射到许多虚拟站点。
添加现场总线映射
在工厂结构
中选择一个控制器。 转到现场总线和 SoftPLC
。选择概览选项卡。
选择至控制器或从控制器,然后在虚拟站点映射配置字段中选择添加,以向控制器或从控制器添加现场总线映射。
选择现场总线选项卡,然后从下拉菜单中选择虚拟站点和现场总线配置。
现场总线信号配置在现场总线子选项卡中创建。
选择添加。
现场总线映射现在在虚拟站点映射配置中可见。
添加非循环现场总线映射
在工厂结构
中选择一个控制器。 转到现场总线和 SoftPLC
。选择概览选项卡。
选择从控制器非循环,然后在虚拟站点映射配置中选择添加。
选择非循环现场总线选项卡,然后从下拉菜单中选择虚拟站点和非循环现场总线配置。
非循环现场总线配置在非循环子选项卡中创建。
选择添加。
现在,现场总线映射在来自控制器的非循环选项卡下的虚拟站点映射配置区域中可见。
现场总线映射按照它们分配给虚拟站点的顺序或现场总线映射可以适合的最低可能的进入点放置在过程数据帧中。
编辑开始和结束实例
可以为现场总线映射编辑开始和结束实例。
开始和结束实例是固定位置,用于定义非循环现场总线配置应从何处开始和结束。输入正确的范围很重要。
在虚拟站点映射配置字段中选择来自控制器的非循环选项卡。
如果需要,编辑开始实例和结束实例值。
如果未输入正确的值,则会显示警告现场总线帧必须适合其内容。
最低/第一个可能的非循环数据实例数字
现场总线 | 至控制器实例号 | 从控制器实例号 |
|---|---|---|
Profinet-IO | 1024 | 2048 |
Profibus-DP | 1024 | 2048 |
以太网/IP | 32768 | 4096 |
DeviceNet | 1024 | 2048 |
CC-Link | 不支持 | 不支持 |
CC-Link IE | 1024 | 2048 |
每次拧紧后,已配置项目的测量值可作为非循环数据供 PLC 从系统读取。每次拧紧后,数据将用新值更新。
当信号循环完成设置为高时,就可以读取数据了。该数据在下一次拧紧开始之前(即发送输入信号开始之前)一直有效。
PLC 发出一系列 GET_RECORD 命令来收集所有数据。
查看分配给虚拟站点的现场总线映射
如要查看现场总线映射如何分配给虚拟站点:
在工厂结构工作区
中选择一个控制器。 选择现场总线和 SoftPLC
选项卡,然后选择概览子选项卡。
现场总线虚拟站点映射配置菜单显示现场总线映射列表以及它们被分配到哪个虚拟站点。至控制器偏移列指向现场总线映射启动的过程数据帧中的地址。
现场总线配置选项卡
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表或创建新的现场总线映射。
列 | 说明 |
|---|---|
| 复选框。 |
名称 | 名称:显示映射的名称。该名称与接收映射和发送映射一致。 |
接收容量 | 虚拟站点接收的映射的容量。数值必须为偶数字节。 |
发送容量 | 从虚拟站点发送的映射的容量。数值必须为偶数字节。 |
库链接 | 链接到全局库 是/否。 |
最后更改 | 最后一次更改的时间,用 ToolsTalk 2 时间表示。 |
更改人 | 进行最后更改的人是谁。 |
控制器更新时间 | 控制器更新时间,以控制器时间表示。 |
控制器更新人 | 更新控制器的人。 |
创建、导入和删除现场总线映射
创建一个新的现场总线映射
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
选择添加创建新的现场总线配置或双击以编辑现有现场总线配置。
创建新的现场总线配置对话窗口将打开。
选择新建选项卡。
为配置分配一个名称。
输入控制器接收容量参数。这是虚拟站点接收的数据帧的容量,以字节数表示。该数值必须为偶数。
输入控制器发送容量参数。这是虚拟站点发送的数据帧的容量,以字节数表示。该数值必须为偶数。
发送帧和接收帧的容量可能不同。
选择添加以通过向设置添加项目来继续配置。
输入的映射大小不能大于过程数据帧。
导入现场总线映射
先前导出的现场总线映射可以重新用作模板并导入控制器。
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
选择添加。
创建新的现场总线配置对话窗口将打开。
选择导入选项卡重新使用现有映射。
选择打开文件命令按钮打开浏览器窗口。
选择一个文件。文件类型必须为 JSON 文件。(*.json)。
选择打开。浏览器窗口关闭。
选择添加导入文件。此操作还将关闭弹出窗口,映射列表将被更新。
删除现场总线映射
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
对于要删除的每个现场总线映射,选择现场总线工作区最左列中的复选框
。从下拉菜单中选择管理,然后选择删除。
映射列表更新。
创建现场总线信号配置
在此区域中,可以创建从控制器到控制器的新的现场总线信号配置。
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
双击映射名称以查看它或选择添加创建一个新的映射。
工作区显示配置菜单。
选择现场总线配置菜单中的到控制器选项卡或从控制器选项卡。
选择添加。
创建信号配置对话窗口将打开。
选择列表中的项目名称以选择项目。
通过输入最低有效位 所在的字节数来设置项目起始位置。
通过输入最低有效 BIT 所在的BIT 来设置项目起始位置。
设置项目的长度,以位数表示。
从下拉菜单中选择一个可选的转换器值。
选择添加。
为待添加的每个项目重复步骤 6-11。
选择关闭终止添加操作并关闭对话窗口。
如果项目未手动放入映射中,ToolsTalk 2 将尝试将项目放在尽可能低的位置。可以稍后在映射内移动项目。
现场总线配置参数
通过定义最低有效位的位置将项目放入现场总线映射中。该位置由字节数和位数来标识。
信息 | 说明 |
|---|---|
开始字节 | 项目最低有效位置的字节数。一个数字,介于从零到最大容量减去一的范围内。 编号从零 (0) 开始。最低有效字节或位为数字 0。 |
开始位 | 项目最低有效位所在的位数。从先前选择的起始字节开始。数字范围从 0 到 7。 编号从零 (0) 开始。最低有效字节或位为数字 0。 |
长度 | 数值代表项目中的位数。 |
系列 | 仅供参考。提供所选项目的最小长度、最大长度和默认长度信息。 |
变换器 | 可用信号转换器的下拉列表。如果 SoftPLC 对如何以数字格式表示项目有任何要求,则使用这种方法。 |
项目转换器用于在不同数据类型之间转换项目。
信息 | 说明 |
|---|---|
布尔反演 | 将数字信号从高态有效 (1) 反转为低态有效 (0)。 |
固定点 |
|
异步数据
当需要通过过程数据发送诸如拧紧结果之类的非循环数据时,将使用异步数据。
如果到 PF 的现场总线异步数据 和来自 PF 的现场总线异步数据信号被添加到现场总线映射然后映射到虚拟站点,则异步数据被启用,如果非循环结果配置映射到同一虚拟站点,则结果输出到异步数据而不是非循环数据。
异步数据中的拧紧结果
以下部分提供了当使用 I/O 信号到 PF 的现场总线异步数据和来自 PF 的现场总线异步数据时使用异步数据在现场总线主机和控制器之间进行通信的示例。
拧紧完成时,现场总线主站会收到信号循环完成,拧紧后接收到信号循环完成就可以获取拧紧结果。
现场总线主站发送 I/O 信号 10077 - 到 PF 的现场总线异步数据,请求由控制器读取的第一组结果数据。
控制器以带有一个拧紧结果子数据包的 I/O 信号 107 - 来自 PF 的现场总线异步数据作为响应。
来自控制器的拧紧结果不得大于现场总线帧的最大尺寸。
当现场总线主站完成读取第一个数据包时,命令到 PF 的现场总线异步数据设置为零,表示已接收并读取了第一个子消息。
控制器以一条可以再次请求新的拧紧结果子数据包的确认消息来自 PF 的现场总线异步数据作为响应。
现场总线主站读取数据帧,如果序号取反,则表明所请求的子数据包是队列中的最后一个。
如果现场总线主站请求拧紧结果并且队列为空,则控制器以空数据帧作为响应。
配置异步数据
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
双击映射名称以查看它或选择添加创建一个新的映射。
工作区显示配置菜单。
选择现场总线配置菜单中的到控制器选项卡或从控制器选项卡。
选择添加。
创建信号配置对话窗口将打开。
当选择到控制器选项卡时,选择到 PF 的现场总线异步数据;当连接从控制器选项卡时,选择来自 PF 的现场总线异步数据。
输入最低有效位所在的字节编号。
通过输入最低有效 BIT 所在的BIT 来设置项目起始位置。
设置项目的长度,以位数表示。
选择关闭终止添加操作并关闭对话窗口。
了解现场总线配置和现场总线映射
在现场总线配置菜单中可以编辑现场总线映射。可以在映射内添加、删除或移动项目。
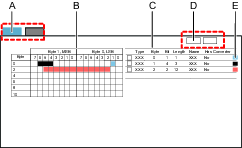
A | 选项卡;选择接收映射或发送映射 | B | 映射以图形形式显示放置项目的方式 |
C | 映射以表格形式显示放置项目的方式 | D | 添加或删除映射项目的命令按钮 |
E | 项目位置的颜色代码示例 |
如果在列表中选择了一行,该项目将在列表中和映射上突出显示。
如果在映射上选择了一个项目,它将在映射上和列表中突出显示。
一个项目可以占用一个位或扩展到几个位。始终以最低有效位的起始位置描述项目位置。起始位置指向一个字节和位。长度参数指示项目从右到左延伸多长。
项目将在弹出窗口中添加或编辑。
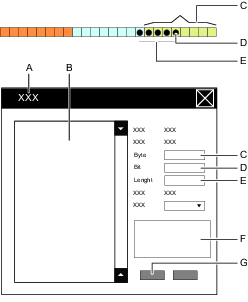
A | 添加项目或编辑项目弹出窗口映射 | B | 可用项目列表 |
C | 字节位置 | D | 位位置 |
E | 位长度参数字段 | F | 项目信息字段 |
G | 命令按钮 |
在过程数据帧中自动放置现场总线映射
当分配给虚拟站点时,现场总线映射自动放置在过程数据帧中。稍后可以通过编辑现场总线和 SoftPLC 选项卡中的现场总线虚拟站点映射配置菜单中的偏移位置来更改顺序。
使用以下方法:
现场总线映射按照它们被分配到过程数据帧的顺序放置。
每个映射以帧的开始处的偏移值开始。
映射放置在最低可能的位置,就在上一个映射的上方,或第一个映射零偏移量的位置。
如果从过程数据帧中删除映射,将留下一个空隙。当将新映射分配给虚拟站点时,放置规则将尝试填充空隙。
如果映射不能放进现有映射之间,可尝试放在数组中的下一个空白位置。
可以在设置窗口中手动更改偏移值。必须注意不要重叠现场总线映射。
如果 ToolsTalk 2检测到任何违反放置规则的行为,偏移参数旁将出现一个错误指示符。这表示映射重叠或映射超出边界。这可以通过更改偏移值来修正。
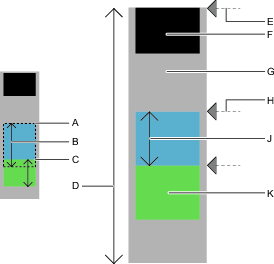
A | 过程数据帧中的第一个现场总线映射的起始位置;偏移 = 零 |
B | 现场总线映射在过程数据帧中的起始位置;表示为从 PDF 起始处的偏移量。 |
C | 现场总线映射的大小。 |
D | 现场总线映射 |
E | 过程数据帧的大小 |
F | 错误示例;蓝色映射与“绿色”映射的开始位置重叠 |
G | 映射大小 |
H | “蓝色”映射的开始位置 |
J | 过程数据帧 |
K | 过程数据帧中的第一个映射;偏移地址为零 |
在现场总线映射中自动放置项目
项目被自动放置在现场总线映射中。随后可通过编辑现场总线窗口来更改顺序。
使用以下方法:
项目按照它们被添加到现场总线和 SoftPLC
中的现场总线虚拟站点映射配置菜单中的现场总线映射的顺序放置。项目被放置在与字节、位和长度位置相关的最低可能的位置。
如果项目不能放进现有项目之间,可尝试放在数组中的下一个空白位置。
如果从现场总线映射中删除了一个项目,则会留下一个空隙。当添加新项目时,放置算法将尝试填充该空隙。
如果ToolsTalk 2检测到任何违反放置规则的行为,将出现错误指示符
并指出错误位置。将光标放在错误指示符上将显示违规详情。
编辑或查看现场总线映射中的项目
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
双击所选映射的名称。
工作区显示配置菜单。
选择现场总线配置菜单中的到控制器选项卡或从控制器选项卡。
双击现场总线配置菜单中的映射表中的项目名称。
编辑项目对话窗口将打开。
通过输入最低有效 BIT 所在的BYTE 编号来编辑项目起始位置。
通过输入最低有效 BIT 所在的BIT 来编辑项目起始位置。
编辑项目的长度,以位数表示。
从下拉菜单中编辑一个可选的转换器值。
选择确定确认任何更改并关闭对话窗口。
现场总线配置菜单在映射和表中更新。
从现场总线映射删除项目
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示映射列表。
双击所选映射的名称。
工作区显示配置菜单。
选择现场总线配置菜单中的到控制器选项卡或从控制器选项卡。
对于要从映射中删除的每个项目,选择现场总线配置菜单中的项目表中最左侧位置的复选框
。选择删除。
现场总线配置菜单在映射和表中更新。
导出现场总线映射
现场总线映射定义信号项目放入虚拟站点与远程位置之间使用的通信帧的方式。该映射可以导出为模板,并由另一个控制器导入和再用。
在工厂结构窗口
中选择一个控制器。选择菜单栏中的现场总线和 SoftPLC
选项卡。选择现场总线子选项卡以显示工作区和映射列表。
在现场总线工作区的最左侧列中,选中要导出的现场总线映射的复选框
,然后从下拉列表中选择管理,导出。转到所需位置,然后选择保存。
映射将被保存为 JSON 文件 (*.json)。导出的文件可以导入到其他控制器。
使用非循环现场总线配置
拧紧结果中的一些数据将作为非循环数据发送。IO signal cycle_complete 通常表示非循环数据已准备由 PLC 程序员提取。
以下部分介绍了如何配置非循环数据。
非循环数据配置概述
在非循环数据配置区域中,可以添加新的非循环数据配置,一旦添加后,不同的非循环数据配置将以列表形式显示。
在工厂结构
中选择一个控制器。 选择现场总线和 SoftPLC 选项卡
。选择非循环子选项卡。
各列包含下列信息:
列 | 说明 |
|---|---|
名称 | 虚拟站点映射中可选配置的名称。 |
|
通道选择方式 | 螺栓或通道。此值定义每个结果配置项的标识符是螺栓还是通道。 |
数据布局 | 压缩或固定。 |
最后更改 | 用 ToolsTalk 2时间表示。 |
最后更改人 | 配置数据最后由 <user> 更改。 |
控制器更新时间 | 用控制器时间表示。 |
控制器更新人 | 控制器由 <user> 更新。 |
添加新的非循环数据配置
在工厂结构
中选择一个控制器。 转到现场总线和 SoftPLC 选项卡
。选择非循环子选项卡。
选择添加,然后在创建新的非循环数据配置窗口中选择新建。
输入非循环数据配置名称,然后选择添加。
新创建配置的属性子选项卡将打开。
新的非循环数据配置添加在最低可能的位置,列表被更新。
非循环数据配置菜单
双击非循环选项卡中的非循环数据配置以打开非循环数据配置菜单。
属性菜单:
参数名称 | 说明 |
|---|---|
名称 | 虚拟站点映射中可选配置的名称。 |
最大大小 | 此值将手动设置,直到将其映射到虚拟站点。此值可确保配置适合映射中的选定实例。根据数据记录大小,该值由所需的实例数求出。 |
第一个通道或螺栓偏移 | 第一个通道或螺栓偏移的地址。这定义了公共区域的大小。 |
螺栓或通道模板大小 | 螺栓或通道的大小。 |
通道选择方式 | 螺栓或通道。此值定义每个结果配置项的标识符是螺栓还是通道。 |
数据布局 | 可以选择:
|
添加标头 | 选中该复选框以指示必须将标头添加到非循环配置结果中。选中此复选框后,将根据使用情况更新低于或高于 6 个字节的偏移量。这也可以通过图形来表示。只有在有空间的情况下才能添加标头。如果在公共区域中添加了项目而没有标头空间,则会被禁用。 如果选择了压缩数据布局,强烈建议使用标头以了解非循环数据有效负载的长度。 |
不存在的值 | 如果配置需要拧紧结果或多级配置中不存在的数据,则使用不同数据类型的不存在值。 当新的非循环现场总线被创建时,将从控制器自动设置这些值。 |
配置非循环数据
配置非循环数据区显示按最大大小、偏移和模板大小设置的非循环配置的可视化。所有配置均为字节级别。
当项目添加到公共、螺栓或通道区域时,左侧显示的非循环数据帧会发生变化。
如果偏移和模板大小的值为零,则公共、螺栓或通道区将灰显且不可编辑。
公共区域中的数据
公共区域包含全局数据,适用于同一站点中的所有转轴。公共区域数据显示在标题之后和螺栓/通道数据之前。
螺栓或通道数据
对于选定的螺栓或通道,螺栓或通道区域中的数据是唯一的,并且在螺栓或通道区域中的数据布局取决于所选的数据布局。
公共区概述
第一个占用区域包含以下项目:
多次拧紧结果
批次序列结果
结果通知
这些项目是“通用的”,并非特定于螺栓或通道,并包含以下参数:
参数名称 | 说明 |
|---|---|
类型 | 每个项目的值类型。示例:批次序列结果值、结果通知或多次拧紧结果值。 |
偏移 | 具有非循环数据帧的字节数组中的项位置,以字节为单位定义。 |
容量 | 大小(字节)。如果数据类型是字符串,则可以手动配置它。如果数据类型不是字符串,则根据数据类型自动设置这些值。 |
数据类型 | 数据类型值。例如:String、Int8、Int16 等。 |
名称 | 项目名称。不可编辑。 |
在公共区域添加非循环结果配置
在公共区域选择添加。
创建非循环结果配置窗口将打开。
从多次拧紧、结果通知或批次序列下拉菜单中选择一个参数。
选择输出数据类型,输入偏移值,如果选择输出数据类型为字符串,则输入大小。
选择添加然后选择关闭。
从公共区域删除非循环结果配置
选择需要在公共区域中删除的配置的复选框。
选择删除。
螺栓或通道区域概述
在螺栓或通道配置区域中,可以为螺栓或通道配置以下类型的非循环数据项:
多级拧紧
程序监视器
程序限制
步骤监视器
步骤限制
参数名称 | 说明 |
|---|---|
类型 | 每个项目的值类型。例如:多级拧紧、程序监视器、程序限制、步骤监视器或步骤限制。 |
偏移 | 非循环数据帧中的项目位置,以字节为单位定义。 |
容量 | 大小(字节)。如果数据类型是字符串,则可以手动配置它。如果数据类型不是字符串,则根据数据类型自动设置这些值。 |
数据类型 | 数据类型值。例如:String、Int8、Int16 等。 |
名称 | 项目名称。不可编辑。 |
识别符 | 设置所选螺栓或通道的 ID。 |
在螺栓或通道区域中添加非循环结果配置
在螺栓或通道区域中选择添加。
创建非循环结果配置窗口将打开。
从多步骤拧紧、程序监视器、程序限制、步骤监视器或步骤限制下拉菜单中选择一个参数。
选择输出数据类型,输入偏移值、标识符,如果选择的输出数据类型为字符串,则输入大小。
对于步骤监视器和步骤限制,选择步骤类别,然后在软启动、运行、启动和最终之间进行选择。
代替步骤编号,指示应该显示哪个步骤类别结果。
如果有多个步骤具有相同的步骤类别,则可以选择在步骤类别选择器下拉菜单中显示上次执行或程序中最后执行的步骤(具有较高顺序号的步骤)。
选择添加,然后选择关闭。
在螺栓或通道区域中创建副本
可以使用螺栓或通道区域中的创建副本选项卡一次添加多个螺栓或通道。
选择需要复制的 ID 的复选框,然后选择创建副本。
创建螺栓或通道的副本窗口将打开。
在副本数字段中输入副本数量。
如果没有用于副本的空间,则会显示警告副本数量不能适应当前配置中的剩余空间。
选择创建副本,然后选择关闭。
现在可以看到包含顺序识别码的副本列表。复制的 ID 的值始终是已存在的最大数字之后的数字。例如,如果已存在值为 2、5 和 6 的 Id,并且复制了值为 2 的 Id,则新 ID 的值将为 7。双击参数以更改任何值。
从螺栓或通道区域删除非循环结果配置
选择 ID 的复选框以删除该 ID 下的所有配置,或者若要删除单个配置,请在螺栓或通道区域中选择该配置旁边的复选框。
选择删除。
拧紧结果示例
在该现场总线映射中,拧紧结果数据从记录号 2048 开始,每个记录为 64 字节。拧紧数据(包括标题)的最大大小为 646 字节,以适合多达 64 个通道。
数据 | 数据类型 | 在帧中的位置 | 字节 | |
|---|---|---|---|---|
a 数据部分的长度以及从标题开始的序列和长度,即数据的长度加上 4 个字节 | ||||
状态 | 整数 | 标题 | 0-1 | |
序列 | 整数 | 标题 | 2-3 | |
数据长度a | 整数 | 标题 | 4-5 | |
螺栓编号通道 1 | 整数 | 数据 | 6-7 | |
最终扭矩通道 1 | 实际 | 数据 | 8-11 | |
最终角度通道 1 | 实际 | 数据 | 12-15 | |
螺栓编号通道 2 | 整数 | 数据 | 16-17 | |
最终扭矩通道 2 | 实际 | 数据 | 18-21 | |
最终角度通道 2 ....................................... | 实际 | 数据 | 22-25 | |
螺栓编号通道 64 | 整数 | 数据 | 636-637 | |
最终扭矩通道 64 | 实际 | 数据 | 638-641 | |
最终角度通道 64 | 实际 | 数据 | 642-654 | |
标题字段的功能
信号 | 数据类型 | 说明 |
|---|---|---|
状态 | 整数 | 已添加以供将来使用,目前始终为 0x8100 |
序列 | 整数 | 将永远为 -1 |
数据长度 | 整数 | 数据的长度以及标题的序列和长度,即数据的长度 + 4 个字节 |
数据字段的功能
信号 | 数据类型 | 说明 |
|---|---|---|
螺栓编号通道 X | 整数 | 通道的螺栓编号,根据拧紧中使用的同步模式下的配置。对于未包括在拧紧中的通道,螺栓编号将设置为 0 |
最终扭矩通道 X | 实际 | 通道的拧紧结果中的最终扭矩值。该值始终以 Nm 为单位发送。对于未包含在拧紧中或未产生最终扭矩值的通道,它将设置为 0x7F820000 |
最终角度通道 X | 实际 | 通道的拧紧结果中的最终角度值。该值始终以度为单位发送。对于未包含在拧紧中或未产生最终扭矩值的通道,它将设置为 0x7F820000 |
最终扭矩和最终角度值将根据 ISO/IEC/IEEE60559:2011 发送给浮点二进制文件 32。数据以网络顺序(大端)传输。如果无法发送值,则将发送特殊值 0x7F820000。如果解释为浮点数,则它对应于 NaN(非数字)。
整数值以带符号的 16 位整数形式发送,即有效范围是 -32768 至 32767
例如,如果对通道 1 和通道 3 进行了拧紧,则产生了以下拧紧数据:
通道 1
螺栓编号 1
最终扭矩 10.23 Nm
最终角度 341.4°
通道 3
螺栓编号 5
最终扭矩 10.32 Nm
没有产生最终角度
拧紧数据在实例编号 2048 处发送,如下所示:
字节 | 区域 | 值 | 注释 |
|---|---|---|---|
0-1 | 状态 | 0X8100 | 将永远为 0X8100 |
2-3 | 序列 | -1 | 将永远为 -1 |
4-5 | 长度 | 34 | 34 字节,三个通道的数据 + 长度和序列号 |
6-7 | 螺栓编号通道 1 | 1 | |
8 - 11 | 最终扭矩通道 1 | 10.23 | 10.23 Nm |
12-15 | 最终角度通道 1 | 341.4 | 341.4° |
16-17 | 螺栓编号通道 2 | 0 | 未包括在拧紧中 |
18-21 | 最终扭矩通道 2 | 0x7F820000 | 无可用的扭矩值 |
22-25 | 最终角度通道 2 | 0x7F820000 | 无可用的角度值 |
26-27 | 螺栓编号通道 3 | 5 | |
28-31 | 最终扭矩通道 3 | 10.32 | 10.32Nm |
32-35 | 最终角度通道 3 | 0x7F820000 | 无可用的角度值 |
SoftPLC 配置选项卡
SoftPLC 概览
SoftPLC 用于自定义 PF6/PFFlex 行为,发送和接收现场总线数据,或与外部 SoftPLC 交换 I/O 信号。外部 SoftPLC 用于组装线上的机器控制。配置和编程通过称为 MultiProg 的第三方软件完成,与 ToolsTalk 2 集成,即使是在其自己的进程中运行。对于通过许可证和/或功能支持此功能的控制器,SoftPLC 可在现场总线和 SoftPLC 选项卡 中找到并可见。
控制器特征(例如低反应拧紧策略和其他功能中的控制器范围的功能等)需要通过功能管理系统 (FMS) 分发的许可证。虽然可以在没有特定许可证的情况下配置特征,但分配和使用这些特征将需要在控制器上安装正确的许可证。有关许可证的更多详细信息,请参阅许可证 (FMS)。
创建 SoftPLC 信号配置
附件与 SoftPLC 之间的互动通过交换 I/O 信号来完成。
在 SoftPLC 信号配置字段中选择添加,以查看所有与此控制器连接的受支持的 I/O 信号的列表。
清除不相关的信号,以将其从 SoftPLC 信号配置中排除(默认情况下选择所有信号)。
为信号配置列表命名。
当将信号配置映射到虚拟站点时,创建的信号配置作为下拉列表中的一个选项将变得可用。
信号配置中未包括的信号(未检查)将仍然在 SoftPLC 配置程序 Multiprog 中可见,但被划掉。
SoftPLC 虚拟站点映射配置
创建一个新的 SoftPLC 映射
在 SoftPLC 虚拟站点映射配置中选择添加
在创建新的 SoftPLC 映射窗口中,从下拉菜单中选择所需的虚拟站点和 SoftPLC 信号配置。
相同的 SoftPLC 信号配置可用于多个虚拟站点。
每个虚拟站点可以使用一个 SoftPLC 信号配置。当使用特定信号配置映射虚拟站点时,在创建新的 SoftPLC 映射时,该虚拟站点不再出现在下拉菜单中。要使其可用,请删除该虚拟站点的现有映射。
SoftPLC 索引:将控制器上的特定虚拟站点连接到 SoftPLC 环境中的有序索引。比如,如果 SoftPLC 指的是虚拟站点 2,则该映射将准确地通知 SoftPLC 哪个虚拟站点当前是 2 号。
在项目虚拟站点中选择更新,以查看您对 SoftPLC 项目中的 SoftPLC 信号配置或 SoftPLC 映射所做的任何更改。更新时,ToolsTalk 2 不会删除 Multiprog SoftPLC 项目中的变量,它只能添加或修改。因此,建议在更新之前清除 Multiprog 中的虚拟站点或现场总线的全局变量。
删除 SoftPLC 映射
通过选中相应的复选框来选择虚拟站点信号配置映射。选择删除。
创建一个新的 SoftPLC 项目
创建一个新的 SoftPLC 信号配置。
将 SoftPLC 信号配置分配给虚拟站点。
在常规 SoftPLC 设置中选择 SoftPLC 为开启。
选择新建,Multiprog 将自动打开到新的 SoftPLC 项目。
该项目将使用基础模板,该模板包括 Multiprog 中可用的所有功能。
创建和编辑的项目在项目建立并存储在文档 > MP 模板中时,会连续保存到本地光盘。在 ToolsTalk 2 SoftPLC 启动时,当选择打开时,如果 SoftPLC 项目尚未保存到 ToolsTalk 2 服务器,则上传使用该存储的数据项目。
在 Multiprog 中编辑 SoftPLC 程序,在 ToolsTalk 2 中为项目提供一个名称和说明。
通过在项目虚拟站点字段中选择更新来添加具有 I/O 信号配置的虚拟站点映射。
通过在现场总线中的 SoftPLC 帧大小字段中选择更新来添加现场总线数据。
必须将现场总线帧大小配置为包含一个特殊的 SoftPLC 输入/输出部分,以便能够直接从 SoftPLC 发送和接收现场总线数据。
选择保存可将已编辑的项目登记到 ToolsTalk 服务器。
将更改推送到控制器。
删除 SoftPLC 项目
删除项目
在项目区域中选择删除。在对话框窗口中再次选择删除进行确认。
创建 SoftPLC 用户数据
集成被实施,以便我们共享在 SoftPLC 与 OpenProtocol 适配器之间映射的内存,并且最多支持六个虚拟站点。虚拟站点被分配 100 字节用于到 SoftPLC 的数据,以及 100 字节用于来自 SoftSoft 的数据。在两个方向上总共映射了 600 字节。
SoftPLC 可以通过共享内存的专用部分与协议适配器进行交互。
在常规 SoftPLC 设置字段中选择添加。
在创建 SoftPLC 用户数据窗口,从下拉列表中选择相关协议。
填写到 SoftPLC 和从 SoftPLC地址字段,开始地址填 0,结束地址填 999。
选择添加。
Multiprog 软件中的 Global_Variables* 部分将包含具有以下地址的每个虚拟站点的输出变量 (opOUT_VSX) 和输入变量 (opIN_VSX)。
虚拟站点
开放协议用户数据到 SoftPLC
开放协议用户数据从 SoftPLC
虚拟站点 1
%MB3.38400
%MB3.40448
虚拟站点 2
%MB3.38500
%MB3.40548
虚拟站点 3
%MB3.38600
%MB3.40648
虚拟站点 4
%MB3.38700
%MB3.40748
虚拟站点 5
%MB3.38800
%MB3.40848
虚拟站点 6
%MB3.38900
%MB3.40948
如果要导入或更新尚未设置上述地址的项目,则必须将其手动添加到 Multiprog 中。
选择 SoftPLC 开启或关闭。
开启:如果 SoftPLC 过程丢失,工具将被锁定,无法执行任何拧紧操作。
关闭:如果 SoftPLC 过程丢失,工具将仍然能够执行拧紧。
在控制器中执行开放协议操作。
将更改推送到控制器。
设置 SoftPLC 通信
在开放协议客户端中,使用 MID0241 订阅用户数据。
控制器通过将 MID0005 发送到开放协议客户端来接受命令。
开放协议客户端使用 MID0240 从控制器下载用户数据。
控制器通过将 MID0005 发送到开放协议客户端来接受命令。
控制器使用 MID0242 将数据发送到开放协议客户端。
开放协议客户端使用 MID0243 确认已收到用户数据。
有关更多信息,请参见文档“OpenProtocol Appendix for PowerFocus 6000 SW1.5.docx”。
导入 SoftPLC 项目模板
可以从现有项目模板创建新的 SoftPLC 项目。模板将作为一个基本建议,可以进一步调整。所选的项目模板然后将会被复制,以免覆盖原始项目。
选择导入项目然后选择一个已有的 SoftPLC 项目。
在 Multiprog 中编辑 SoftPLC 项目。
通过在项目虚拟站点中选择更新来添加具有 I/O 信号配置的虚拟站点映射。
通过在现场总线中的 SoftPLC 帧大小中选择更新来添加现场总线数据。
选择保存可将已编辑的项目登记到 ToolsTalk 服务器。
将更改推送到控制器。
在项目虚拟站点中选择更新,然后将 SoftPLC 虚拟站点映射添加或更新到 SoftPLC 项目(如果尚未包含在项目中)。
使用库选项卡
库选项卡 位于左侧菜单栏中,它包括全局功能并提供以下功能:
库 | 功能 |
|---|---|
 | 拧紧程序库 该库包含可供控制器订阅的所有全局拧紧程序。全局拧紧程序可以从一个控制器复制,或者在库中创建、修改和/或分发到一个或多个控制器。 |
 | 配置库 该库包含可供控制器订阅的所有全局配置。配置可以从一个控制器复制,或者在库中创建、修改和/或分发到一个或多个控制器。 |
 | 现场总线配置库 该库包含可供控制器订阅的所有全局现场总线配置。现场总线配置可以从一个控制器复制,或者在库中创建、修改和/或分发到一个或多个控制器。 |
| 设置库 用于事件配置的库,可以分配给其他控制器。可以在此处或在设置 |
| 程序模板库 为多步骤拧紧程序创建模板。创建新的多步骤程序时,模板可以插入(拖放)并作为构建多步骤程序的基础。 |
 | 控制器配置库 控制器配置库包含控制器模板,可用于创建和修改控制器配置并将它们分配到多个控制器。该库对于在“站点设置”模式下复制和开发配置非常有用,无需访问 ToolsTalk 2 服务器安装。 |
库 - 分发列表
分发列表的工作方式类似于订阅列表。每当对其中一项全局配置进行更改时,更改将传播到所有订阅者。分发列表管理订阅。
选择左侧菜单栏中的库
。 选择以下其中一项查看分发情况:
全局拧紧程序
。全局配置库
 。
。全局现场总线库
 。
。全局设置库
 。
。
在选定的库部分选择一个或多个复选框以查看分发列表的内容。
分发列表显示订阅当前选定配置的所有控制器。
拧紧程序库
拧紧程序库介绍
拧紧战略选择与参数值的组合构成拧紧程序,称为拧紧程序。拧紧程序可以是全局的或本地的。
本地拧紧程序仅对单个控制器有效,而全局拧紧程序可能会有多个控制器订阅同一个拧紧程序。
控制器可订阅全局拧紧程序。每当对程序进行更改时,更改将传播到订阅该程序的 ToolsTalk 2 中的所有控制器。
拧紧程序库管理全局拧紧程序和订阅特定拧紧程序的控制器。
订阅者的更新在 ToolsTalk 2 应用程序中完成。所有受影响的控制器将在生产线结构工作区中显示推送指示符 。
ToolsTalk 2 可区分本地和全局拧紧程序,尽管控制器本身并不了解这一点。因此,如果通过控制器图形用户界面或 web 图形用户界面更改了拧紧程序,则必须在 ToolsTalk 2 中指定操作。
拧紧程序库工作区
选择左侧菜单栏中的库
。 转到拧紧程序库
。工作区将显示全局拧紧程序的列表。
列 | 说明 |
|---|---|
复选框 | 选择一个配置。 |
名称 | 显示配置的名称。推送指示符 |
策略 | 为配置选择的拧紧策略。 |
全局 | 列中的是表示这是一个全局拧紧程序。 |
目标 | 最终目标可用扭矩值或角度值表示。 |
最后更改 | 当进行最后一次更改时,用 ToolsTalk 2 时间表示。 |
更改人 | 进行最后更改的是哪个用户。 |
版本 | 可支持全局拧紧程序库的控制器软件版本。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示拧紧程序打算用于哪类控制器。 |

命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
选择一个或多个全局拧紧程序复选框查看分发列表。分发列表显示当前订阅所选程序的所有控制器。
如果没有全局拧紧程序,则工作区为空。选择添加以创建新的拧紧程序或双击现有程序以查看或编辑参数。
拧紧程序库 - 添加全局拧紧程序
选择左侧菜单栏中的库
。 转到拧紧程序
。工作区将显示全局拧紧程序的列表。
选择添加。创建新的拧紧程序对话窗口将打开。
输入下表中描述的参数。
在对话窗口中选择添加。窗口关闭,工作区显示拧紧程序菜单。
参数 | 说明 |
|---|---|
控制器类型 | 从快捷菜单选择控制器类型。 |
控制器软件版本 | 从快捷菜单选择控制器软件版本。 |
名称 | 在参数输入字段为全局拧紧程序分配一个名称。 |
策略 | 从快捷菜单选择拧紧策略。 |
目标 | 从快捷菜单选择目标类型。 |
目标值 | 在参数输入字段或字段中输入最后一步的数字目标值。 |
拧紧程序库 - 删除全局拧紧程序
选择左侧菜单栏中的库
。 转到拧紧程序
。工作区将显示全局拧紧程序的列表。
对于要删除的每个拧紧程序,勾选最左列中的复选框
。选择管理然后选择删除。
全局拧紧程序从库中删除,列表更新。
订阅已删除程序的控制器不会丢失该程序。删除的拧紧程序将从拧紧程序库工作区中的列表中移除。拧紧程序仍然存在于已订阅全局拧紧程序的控制器的拧紧工作区的列表中。可见的变化是,拧紧程序从全局拧紧程序转换为本地拧紧程序。(库链接列中的条目被清除)。
拧紧程序库 - 分发全局拧紧程序
拧紧程序库 - 分发列表
全局拧紧程序分发列表与订阅列表一样。每当对全局拧紧程序进行更改时,变更将传播到所有订阅者。分发列表管理订阅。
选择左侧菜单栏中的库
。 转到拧紧程序
。工作区将显示全局拧紧程序的列表。
在全局拧紧程序库中选择一个或多个复选框以查看分发列表的内容。
分发列表显示订阅当前所选拧紧程序的所有控制器。
拧紧程序库 - 添加全局程序到分发列表
选择左侧菜单栏中的库
。 转到拧紧程序
。工作区将显示全局拧紧程序的列表。
使用复选框
选择要添加到分发列表的一个或多个程序。选择管理然后选择分发。
分发全局配置对话窗口将打开。
左侧列显示所选的全局拧紧程序。
右侧列显示与所选程序兼容并可添加到分发列表的控制器列表。
只能在相同类型和相同软件版本的控制器之间分配。
使用复选框
选择右侧列中的一个或多个控制器。如果控制器已经订阅了所选的全局拧紧程序,它将不会显示在右侧列中。
可选步骤:选择向下箭头
 打开其他配置。
打开其他配置。可选步骤:如果通过控制器图形用户界面或 web 图形用户界面更改全局拧紧程序,请选择待 ToolsTalk 2 执行的操作。
选择添加。
对话窗口关闭。
ToolsTalk 2 可区分本地和全局拧紧程序,尽管控制器本身并不了解这一点。因此,如果通过控制器图形用户界面或 web 图形用户界面更改了拧紧程序,则必须在 ToolsTalk 2 中指定操作。该操作定义在拧紧程序库中的全局拧紧程序的分发中。
拧紧程序库 - 从分发列表移除全局程序订阅
全局拧紧程序分发列表与订阅列表一样。每当对全局拧紧程序进行更改时,变更将传播到所有订阅者。分发列表管理订阅。
选择一个全局拧紧程序复选框 以查看分发列表的内容。分发列表显示订阅所选程序的所有控制器。
在工厂结构工作区
中选择一个控制器。转到拧紧程序
。拧紧程序工作区显示拧紧程序列表。
所选拧紧程序的库链接列中的条目标有是。
选择所选拧紧程序的复选框
。选择取消链接。
所选拧紧程序的库链接列中的条目被清除。
选择左侧菜单栏中的库
。 转到拧紧程序库
。选择移除的拧紧程序的复选框
。更新分发列表,并从列表中移除控制器名称。
拧紧程序库 - 更新全局拧紧程序
选择左侧菜单栏中的库
。 转到拧紧程序
。工作区将显示全局拧紧程序的列表。
双击名称字段,拧紧菜单可编辑。更改自动保存到拧紧程序。
如果通过库路径打开拧紧菜单,则全局拧紧程序只能编辑或更新。
订阅者的更新在 ToolsTalk 2 应用程序中完成。所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
拧紧程序库 - 将本地拧紧程序转换为全局程序
可以将在一个控制器开发的本地拧紧程序转换为全局拧紧程序。然后,该拧紧程序可以分发给选定的控制器。
从工厂结构
中选择一个控制器,然后选择拧紧程序。选中要添加到拧紧程序库的程序的复选框。
从下拉列表中选择管理,然后选择添加至库。创建全局配置对话窗口将打开。
选择创建。该程序将添加到拧紧程序库
的列表中。
ToolsTalk 2 可区分本地和全局拧紧程序,尽管控制器本身并不了解这一点。因此,如果通过控制器图形用户界面或 web 图形用户界面更改了拧紧程序,则必须在 ToolsTalk 2 中指定操作。
全局配置库
配置库介绍
配置可以是全局的或本地的。
本地配置对单个控制器有效,全局配置对多个选定的控制器有效。
控制器可订阅全局配置。每当对配置进行更改时,更改将传播到订阅该配置的 ToolsTalk 2 中的所有控制器。
全局配置库管理全局配置和订阅配置的控制器。
ToolsTalk 2 可区分本地和全局配置。控制器本身无法识别本地或全局配置。因此,如果从控制器图形用户界面或 web 图形用户界面更改了设备配置,则必须在 ToolsTalk 2 中指定操作。
全局配置工作区
选择左侧菜单栏中的库
。 转到配置库
。工作区将显示全局配置列表。
列 | 说明 |
|---|---|
复选框 | 选择一个配置。 |
名称 | 显示配置的名称。推送指示符 |
类型 | 配置类型 |
最后更改 | 当进行最后一次更改时,用 ToolsTalk 2 时间表示。 |
更改人 | 进行最后更改的是哪个用户。 |
版本 | 可支持全局配置的控制器软件版本。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示配置打算用于哪类控制器。 |
命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
选择一个或多个全局配置复选框查看分发列表。分发列表显示当前订阅所选配置的所有控制器。
如果没有全局配置,则工作区为空。选择添加以创建新的配置或双击现有配置以查看或编辑参数。
全局配置库 - 创建或导入一个全局配置
创建全局配置:
选择左侧菜单栏中的库
。 点击工作区窗口顶部菜单栏中的配置库
。工作区将显示全局配置列表。
选择添加。
创建新配置对话窗口显示。
输入以下参数:
选择要添加的配置类型,以及配置要应用的控制器类型和控制器软件版本。
在快捷窗口中选择添加。
显示所选配置类型的配置窗口。
配置将自动保存到配置库。
导入已有的全局配置:
选择左侧菜单栏中的库
。 转到配置库
。工作区将显示配置列表。
如要添加新的配置到列表,选择添加。
创建新配置对话窗口显示。
选择导入选项卡。
选择打开文件。
浏览器窗口打开用于读取导入文件。
选择所需的导入文件。文件格式必须为 <configuration_name>.json。选择打开。
在快捷窗口中选择添加。
已导入配置的配置窗口将显示。
配置将自动保存到配置库。
全局配置库 - 删除全局配置
选择左侧菜单栏中的库
。 转到配置库
。工作区将显示全局配置列表。
对于要删除的每个配置,勾选最左列中的复选框
。选择管理然后选择删除。
全局配置从库中删除,列表更新。
订阅已删除配置的控制器不会丢失配置。删除的全局配置将从配置库工作区中的列表中移除。配置仍然存在于已订阅全局配置的配置工作区中的列表中。可见的变化是,配置从全局配置转换为本地配置。(库链接列中的条目被清除)。
全局配置库 - 从现有配置中创建一个全局配置
在工厂结构
中选择一个包含所需配置的控制器。在菜单栏中,转到配置
。选择要添加到库的一个或多个配置,单击管理,然后选择添加到库。
所选的本地配置将成为存储在全局配置库中的全局配置。
如果在控制器或 web 界面进行了本地更改,则有两个选项:
自动还原:控制器中的更改将不会应用到全局配置,而全局配置将仍然适用。
取消链接:控制器中的更改将应用到控制器中的配置,到全局配置的链接将被切断。因此,全局配置将立即从控制器分发列表中移除。
选择库
。 在顶部菜单栏中,选择全局配置
。工作区将显示全局配置列表,新添加的配置现在出现在列表中。
全局配置库 - 分发全局配置
选择左侧菜单栏中的库
。 转到配置库
。工作区将显示全局配置列表。
选择配置复选框
。选择管理然后选择分发。只能在相同类型和相同软件版本的控制器之间分配。
使用复选框
选择待包含在分发中的每个配置。在对话窗口的右侧选择一个或多个控制器。在对话窗口中选择添加。
对全局配置的任何更新也会更新所分发的副本。全局配置中的更改将应用到所选的控制器。
如果在控制器或 web 图形用户界面中进行本地更改,则有两个选项:
自动还原:控制器中的更改将不会应用到配置,而全局配置将仍然有效。
取消链接:控制器中的更改将应用到配置,到全局配置的链接将被切断。因此,全局配置将立即从控制器分发列表中移除。
更改将自动保存到全局配置库。
所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
全局配置库 - 编辑全局配置
选择左侧菜单栏中的库
。 选择全局库
。工作区将显示全局配置列表。
双击要编辑的配置。显示所选配置类型的配置窗口。
更改将自动保存到全局配置库。
所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
全局配置库 - 从分发列表移除全局配置订阅
全局配置分发列表与订阅列表一样。每当对全局配置进行更改时,变更将传播到所有订阅者。分发列表管理订阅。
选择一个全局配置复选框 以查看分发列表的内容。分发列表显示订阅所选配置的所有控制器。
如要从一个控制器中移除全局配置订阅:
在工厂结构工作区
中选择一个控制器。转到配置
。配置工作区显示拧紧程序列表。
已分发配置的库链接列中的条目标有是。
选择所选拧紧程序的复选框
。从下拉菜单中选择管理,然后选择取消链接。
所选配置的库链接列中的条目被清除。
选择左侧菜单栏中的库
。 转到配置库
。选择移除的配置的复选框
。更新分发列表,并从列表中移除控制器名称。
现场总线配置库
现场总线配置可以是全局的或本地的。
本地现场总线配置对单个控制器有效,全局现场总线配置对多个选定的控制器有效。
控制器可订阅全局现场总线配置。每当对配置进行更改时,更改将传播到订阅该配置的 ToolsTalk 2 中的所有控制器。
全局现场总线配置库管理全局现场总线配置和订阅配置的控制器。
订阅者的更新在 ToolsTalk 2 应用程序中完成。所有受影响的控制器将在生产线结构工作区中显示推送指示符 。
ToolsTalk 2 可区分本地和全局现场总线配置,尽管控制器本身并不了解这一点。因此,如果通过控制器图形用户界面或 web 图形用户界面更改了现场总线配置,则必须在 ToolsTalk 2 中指定操作。
现场总线配置工作区
选择左侧菜单栏中的库
。 转到现场总线库
。工作区将显示全局现场总线配置列表。
列 | 说明 |
|---|---|
复选框 | 选择一个现场总线配置。 |
名称 | 显示现场总线配置的名称。推送指示符 |
至控制器的规格 | 显示数据帧的接收大小。 |
源自控制器的规格 | 显示数据帧的发送大小。 |
最后更改 | 当进行最后一次更改时,用 ToolsTalk 2时间表示。 |
更改人 | 进行最后更改的是哪个用户。 |
版本 | 可支持全局现场总线配置的控制器软件版本。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示现场总线配置打算用于哪类控制器。 |
命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
选择一个或多个全局现场总线配置复选框查看分发列表。分发列表显示当前订阅所选现场总线配置的所有控制器。
如果没有全局现场总线配置,则工作区为空。选择添加以创建新的现场总线配置或双击现有配置以查看或编辑参数。
现场总线配置库 - 创建或导入全局现场总线配置
创建现场总线配置:
选择左侧菜单栏中的库
。 转到现场总线库
。工作区将显示现场总线配置列表。
如要添加新的现场总线配置到列表,选择添加。
创建新的现场总线配置对话窗口显示。
输入以下参数添加新的现场总线映射:
输入一个名称
输入到控制器大小和从控制器大小
从快捷菜单中选择设备的控制器类型和控制器软件版本。
在快捷窗口中选择添加。
显示所添加现场总线配置的配置窗口。
现场总线配置将自动保存到现场总线库。
导入已有的现场总线配置:
选择左侧菜单栏中的库
。 转到现场总线库
。工作区将显示现场总线配置列表。
如要添加新的配置到列表,选择添加。
创建新的现场总线配置对话窗口显示。
选择导入选项卡。
选择打开文件。
浏览器窗口打开用于读取导入文件。
选择所需的导入文件。文件格式必须为 <fieldbus_configuration_name>.json。选择打开。
在快捷窗口中选择添加。
显示所添加现场总线配置的配置窗口。
现场总线配置将自动保存到现场总线库。
现场总线配置库 - 删除全局现场总线配置
选择左侧菜单栏中的库
。 转到现场总线配置库
。工作区将显示全局现场总线配置列表。
要删除现场总线配置,请选中最左侧列中的复选框
,然后选择删除 全局现场总线配置从库中删除,列表更新。
订阅已删除配置的控制器不会丢失配置。删除的全局现场总线配置将从现场总线配置库工作区中的列表中移除。现场总线配置仍然存在于已订阅全局现场总线配置的现场总线工作区中的列表中。可见的变化是,现场总线配置从全局现场总线配置转换为本地现场总线配置。(库链接列中的条目被清除)。
现场总线配置库 - 从现有现场总线配置中创建一个全局现场总线配置
在工厂结构工作区
中选择一个控制器(包含所需现场总线配置)。在菜单栏中选择现场总线和 SoftPlc
。在现场总线菜单中,选择要添加到库中的一个或多个现场总线信号配置。从下拉菜单中选择管理,然后选择添加至库。
创建全局配置对话窗口将打开。选择创建。
所选的本地配置将成为存储在全局现场总线配置库中的全局配置。
如果在控制器或 web 图形用户界面中进行本地更改,则有以下两个选项:
自动还原:控制器中的更改将不会应用到全局现场总线配置,而全局配置将仍然适用。
取消链接:控制器中的更改将应用到控制器中的现场总线配置,到全局配置的链接将被切断。因此,全局现场总线配置将立即从控制器分发列表中移除。
选择左侧菜单栏中的库
。 转到全局现场总线库
。工作区将显示全局现场总线配置列表,新添加的现场总线配置现在出现在列表中。
现场总线配置库 - 分发全局现场总线配置
选择左侧菜单栏中的库
。 转到全局现场总线库
。工作区将显示全局现场总线配置列表。
选择待分发的现场总线配置复选框
。从下拉菜单中选择管理,然后选择分发。只能在相同类型和相同软件版本的控制器之间分配。
分发全局配置对话窗口将打开。
在对话窗口的右侧选择一个或多个控制器。选择添加。
对全局配置的任何更新也会更新所分发的副本。全局配置中的更改将应用到所选的控制器。
如果在控制器或 web 图形用户界面中进行本地更改,则有以下两个选项:
自动还原:控制器中的更改将不会应用到全局现场总线配置,而全局配置将仍然有效。
取消链接:控制器中的更改将应用到控制器中的现场总线配置,到全局配置的链接将被切断。因此,全局配置将立即从控制器分发列表中移除。
更改将自动保存到全局现场总线配置库。
所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
现场总线配置库 - 编辑全局现场总线配置
选择左侧菜单栏中的库
。 转到全局现场总线库
。工作区将显示全局现场总线配置列表。
双击要编辑的现场总线配置。
显示所选现场总线配置的配置窗口。
现场总线配置将自动保存到全局现场总线配置库。
所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
现场总线配置库 - 导出全局现场总线配置
选择左侧菜单栏中的库
。 转到全局现场总线配置库
。工作区将显示全局现场总线配置列表。
选择待导出的全局现场总线配置复选框
。选择导出。
浏览器窗口打开用于保存导出文件。
默认名称为 <configuration>.json 点击保存。
现场总线配置库 - 从分发列表移除现场总线配置订阅
全局现场总线配置分发列表与订阅列表一样。每当对全局现场总线配置进行更改时,变更将传播到所有订阅者。分发列表管理订阅。
选择一个全局现场总线配置复选框 以查看分发列表的内容。分发列表显示订阅所选配置的所有控制器。
从一个控制器中移除全局现场总线配置订阅
在工厂结构工作区
中选择一个控制器。转到现场总线和 SoftPLC
。现场总线工作区显示拧紧程序列表。
已分发现场总线配置的库链接列中的条目标有是。
选择所选现场总线配置的复选框
。从下拉菜单中选择管理,然后选择取消链接。
所选现场总线配置的库链接列中的条目被清除。
选择左侧菜单栏中的库
。 转到现场总线配置库
。选择移除的现场总线配置的复选框 。
更新分发列表,并从列表中移除控制器名称。
全局设置库 - 删除一个全局事件配置
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局设置配置列表。
对于要删除的每个配置,勾选最左列中的复选框
。从下拉菜单中选择管理,然后选择删除。
全局设置配置从库中删除,列表更新。
订阅已删除配置的控制器不会丢失配置。删除的全局配置将从设置库工作区中的列表中移除。配置仍然存在于已订阅全局配置的事件配置工作区中的列表中。可见的变化是配置从全局事件配置转换为本地事件配置(设置中的事件下的库链接也被清除)。
全局设置库
参数 | 说明 |
|---|---|
复选框 | 选择事件配置模板。 |
名称 | 显示事件配置模板的名称。 |
最后更改 | 最后更改,用 ToolsTalk 2 时间表示。 |
更改人 | 进行最后更改的人。 |
版本 | 事件配置模板支持的控制器软件版本。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示事件配置打算用于哪类控制器。 |
客户关键字 | 当创建新的全局事件配置时,默认值为无。从现有控制器创建全局事件配置时,从控制器的 Iam.CustomerKey 获取的值。 |
设置配置命令按钮
命令 | 说明 |
|---|---|
| |
添加 |
|
管理 |
|
如果没有之前的事件配置模板,则工作区为空。选择添加以创建新的事件配置模板或双击现有模板以查看或编辑参数。
全局设置库 - 创建或导入一个全局事件配置
创建全局事件配置:
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局事件配置列表。
选择添加。
创建新的事件配置对话窗口将显示。
输入以下参数:
为配置分配一个名称。
从下拉列表中选择控制器类型。
从配置中选择控制器软件版本。
在对话窗口中选择添加。
事件配置窗口将显示。展开每个部分以设置特定参数。
新的配置将自动保存到全局设置库。
导入已有的全局事件配置:
选择左侧菜单栏中的库
。 转到全局设置库
。工作区将显示全局事件配置列表。
如要添加新的配置到列表,选择添加。
创建新的事件配置对话窗口将显示。
选择导入选项卡。
选择打开文件。
浏览器窗口打开用于读取导入文件。
选择所需的导入文件。文件格式必须为 <configuration_name>.json。选择打开。
在快捷窗口中选择添加。
已导入配置的事件配置窗口将显示。
配置将自动保存到事件配置库。
全局设置库 - 删除一个全局事件配置
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局设置配置列表。
对于要删除的每个配置,勾选最左列中的复选框
。从下拉菜单中选择管理,然后选择删除。
全局设置配置从库中删除,列表更新。
订阅已删除配置的控制器不会丢失配置。删除的全局配置将从设置库工作区中的列表中移除。配置仍然存在于已订阅全局配置的事件配置工作区中的列表中。可见的变化是配置从全局事件配置转换为本地事件配置(设置中的事件下的库链接也被清除)。
全局设置库 - 分发一个全局配置
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局事件配置列表。
选择待分发的全局事件的复选框
。从下拉菜单中选择管理,然后选择分发。
只能在相同类型和相同软件版本的控制器之间分配。
分发全局配置对话窗口将打开。
选择待分发的每个配置
的复选框。配置类型可以单独选择。配置之间存在某些依赖关系。选择分发全局配置时,默认情况下也可以选择其他配置。
在对话窗口的右侧选择一个或多个控制器。
在对话窗口中选择添加。
对话窗口关闭,控制器被添加到已分发至中的列表中。新的库链接将被添加到设置中的事件菜单中。
所选配置仅分发给 ToolsTalk 2 中的控制器。
新配置的分发将导致现有配置被删除,并替换为库模板中的配置。
全局设置库 - 从分发列表移除全局程序订阅
从控制器中移除全局设置链接:
在工厂结构工作区
中选择一个控制器。转到设置
。事件工作区显示链接的全局设置。
从下拉菜单中选择管理,然后选择取消链接。
选择左侧菜单栏中的库
。 转到全局设置库
。选择移除的设置的复选框
。更新分发列表,并从列表中移除控制器名称。
全局设置库 - 编辑全局事件配置
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局事件配置列表。
双击要编辑的配置。显示所选配置类型的配置窗口。
更改将自动保存到全局设置配置库。
所有受影响的控制器将在工厂结构工作区中显示推送指示符 。
全局设置库 - 导出全局事件配置
全局事件模板可以导出,然后在另一个 ToolsTalk 2 安装或在 ToolsTalk 2 站点设置安装中重新使用(导入)。
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的设置
库选项卡。工作区将显示全局事件配置列表。
选择待导出的控制器模板的复选框
。选择导出
浏览器窗口打开用于保存导出文件。
默认文件名称为 <Configuration>.json,选择保存。
可为导出的文件起任何一个后缀为 *.json 的名称。
在导出的 * .json 文件中,控制器模板的命名从控制器列中选择。导入控制器模板时,不管是什么样的文件名,为控制器模板取的名称均来自 * .json 文件内的该字段。这意味着导入的控制器模板的名称可能与导入的文件名不同。
为了避免控制器模板名称相同,建议在导出之前为模板取一个独一无二的名称,而不要更改文件名。
程序模板

库 > 程序模板
为多步骤拧紧程序创建模板。创建新的多步骤程序时,模板可以作为构建多步骤程序的基础。
点击添加创建一个新模板。
双击程序模板列表中的模板可修改现有模板。基于该模板的多步骤程序不会受到影响,因为模板是被复制,而不是链接到程序。
程序模板工作区
选择左侧菜单栏中的库
。 转到程序模板库
。工作区将显示全局拧紧程序模板的列表。
列 | 说明 |
|---|---|
复选框 | 选择一个拧紧程序模板。 |
名称 | 显示拧紧程序模板的名称。推送指示符 |
策略 | 为拧紧程序模板选定的拧紧策略。 |
目标 | 最终目标可用扭矩值或角度值表示。 |
最后更改 | 当进行最后一次更改时,用 ToolsTalk 2时间表示。 |
更改人 | 进行最后更改的是哪个用户。 |
版本 | 可支持全局拧紧程序模板的控制器软件版本。 |
| 不是实际的列。 拧紧程序模板列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示拧紧程序模板打算用于哪类控制器。 |
命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
选择一个或多个全局拧紧程序模板复选框以查看分发列表。分发列表显示当前订阅所选程序模板的所有控制器。
如果没有全局拧紧程序模板,则工作区为空。选择添加以创建新的拧紧程序模板或双击现有拧紧程序模板以查看或编辑参数。
导入拧紧程序模板
之前导出的拧紧程序模板可在 ToolsTalk 2安装或 ToolsTalk 2 站点设置安装中导入。
选择左侧菜单栏中的库
。 转到程序模板
。工作区将显示拧紧程序模板的列表。
选择添加然后在创建新的拧紧程序模板窗口中选择导入选项卡。
选择打开文件然后选择所需的导入文件。文件格式必须为 <tightening_program_template_name>.json。选择打开。
工作区将显示拧紧程序模板的更新列表。
可为导出的文件起任何一个后缀为 *.json 的名称。*.json 文件包含显示在拧紧程序模板中的拧紧程序模板名称。导入拧紧程序模板时,不管是什么样的文件名,为拧紧程序模板取的名称将从 * .json 文件中获得。这意味着导入的拧紧程序模板的名称可能与导入的文件名不同。为了避免拧紧程序模板名称相同,建议在导出之前为模板取一个独一无二的名称,而不要更改文件名。
控制器配置库
控制器库介绍
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
控制器库工作区
参数 | 说明 |
|---|---|
复选框 | 选择控制器模板。 |
控制器 | 显示控制器模板的名称。 |
最后更改 | 最后更改,用 ToolsTalk 2时间表示。 |
更改人 | 进行最后更改的人。 |
版本 | 控制器模板支持的控制器软件版本。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
控制器类型 | 显示配置打算用于哪类控制器。 |
命令 | 说明 |
|---|---|
添加 |
|
管理 |
|
如果没有控制器模板,则工作区为空。点击添加以创建新的控制器模板或双击现有模板以查看或编辑参数。
控制器配置库 - 创建新的控制器模板
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
选择左侧菜单栏中的库
。 转到控制器配置
。工作区将显示控制器模板。
选择添加。
创建新的控制器模板对话窗口将显示。
输入以下参数:
为控制器模板分配一个名称。
从下拉菜单中选择控制器类型。
从下拉菜单中选择控制器软件版本。
选择添加。
对话窗口关闭,控制器模板列表将更新。
选择正确的控制器软件版本很重要。模板只能分发给具有相同软件版本的控制器。
控制器配置库 - 删除控制器模板
选择左侧菜单栏中的库
。 选择控制器配置
。工作区将显示控制器模板。
选择待删除的控制器模板的复选框。
从下拉菜单中选择管理,然后选择删除。模板将从列表中删除。
控制器配置库 - 从现有控制器创建模板
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
在工厂结构工作区
中选择一个控制器。从下拉菜单中选择管理,然后选择添加至库。
所有控制器配置(硬件和工具依赖关系除外)都将复制到控制器配置库。
选择左侧菜单栏中的库
。 选择工作区窗口顶部菜单栏中的控制器配置
。工作区显示控制器配置列表,可用作模板的新建控制器配置将显示。
控制器模板的名称从来源控制器名称复制。
建议在库中为控制器模板分配一个独一无二的名称。
控制器配置库 - 分发控制器模板
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
控制器模板或其部件可以分发给一个或多个控制器。分发意味着从模板复制配置,并在允许的情况下覆盖目标控制器上的配置。
控制器模板软件版本必须与目标控制器软件版本相同。如果不匹配,则不能进行分发
选择左侧菜单栏中的库
。 转到控制器配置
。工作区将显示控制器模板。
选择待分发的控制器模板的复选框。
从下拉菜单中选择管理,然后选择分发。
只能在相同类型和相同软件版本的控制器之间分配。
分发控制器模板对话窗口打开。
选择待分发的每个配置
的复选框。配置类型可以单独选择。配置之间存在某些依赖关系。选择分发模板配置时,默认情况下也可以选择其他配置。
在对话窗口的右侧选择一个或多个控制器。
在对话窗口中选择分发。
对话窗口关闭。
所选配置仅分发给 ToolsTalk 2 中的控制器。
选择供分发的配置将导致现有配置被删除,并由模板中的控制器配置替换。
控制器配置库 - 编辑或配置控制器模板
编辑控制器模板与正常的控制器配置非常相似。几乎所有菜单图标和参数设置均与可对 ToolsTalk 2图形用户界面中的实际控制器实施的操作一致。
选择左侧菜单栏中的库
。 转到控制器配置
。工作区将显示控制器模板。
双击控制器模板列表中的名称字段。
控制器工作区与实际控制器一致。为了显示这是一个控制器模板,控制器菜单的背景颜色为较浅的灰色而不是黑色。
控制器配置库 - 导出控制器模板
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
控制器模板可以导出,然后在另一个 ToolsTalk 2安装或在 ToolsTalk 2 站点设置安装中重新使用(导入)。
选择左侧菜单栏中的库
。 转到控制器配置
。工作区将显示控制器模板。
选择待导出的控制器模板的复选框。
从下拉菜单中选择管理,然后选择导出。
浏览器窗口打开用于保存导出文件。
默认文件名称为 <controller_template_name>.json 选择保存。
可为导出的文件起任何一个后缀为 *.json 的名称。
在导出的 * .json 文件中,控制器模板的命名从控制器列中选择。导入控制器模板时,不管是什么样的文件名,为控制器模板取的名称均来自 * .json 文件内的该字段。这意味着导入的控制器模板的名称可能与导入的文件名不同。
为了避免使用相同名称的控制器模板,建议在导出之前为模板取一个独一无二的名称,而不要更改文件名。
控制器配置库 - 导入控制器模板
控制器模板是一个全虚拟控制器。它允许用户在不访问物理控制器的情况下创建、编辑和分析所有控制器配置。可以从头开始创建一个控制器模板,所有参数值都为空。可以通过复制具有有效配置和参数的现有控制器来创建控制器模板。
控制器模板不显示有关工具的信息,因为没有连接任何工具。不能从模板获得硬件相关信息和配置。不能从模板配置支持功能,如各种服务器。当模板分发到控制器时,必须检查或添加这些参数。
之前导出的控制器模板可在 ToolsTalk 2安装或 ToolsTalk 2 站点设置安装中导入。
选择左侧菜单栏中的库
。 转到控制器配置
。工作区将显示控制器模板。
选择添加然后在创建新的控制器模板窗口中选择导入选项卡。
选择打开文件然后选择所需的导入文件。文件格式必须为 <controller_template_name>.json。选择打开。
工作区将显示更新的控制器模板列表。
可为导出的文件起任何一个后缀为 *.json 的名称。*.json 文件包含显示在控制器模板列表中的控制器模板名称。导入控制器模板时,不管是什么样的文件名,为控制器模板取的名称将从 * .json 文件中获得。这意味着导入的控制器模板的名称可能与导入的文件名不同。为了避免使用相同名称的控制器模板,建议在导出之前为模板取一个独一无二的名称,而不要更改文件名。
使用系统管理选项卡
ToolsTalk 2中的系统管理选项卡 位于左侧菜单栏,提供以下功能:
系统管理选项卡 | 说明 |
|---|---|
| 控制器软件和数据管理 管理所有控制器的软件更新。将控制器组织成自定义部分。 |
| 计划任务 控制器配置可按计划的间隔导出和导入。 |
| 比较配置 并列比较两个导出的文件。 |
| 功能管理系统 (FMS) 管理所连接的控制器之间授权功能的分发。 |
| 用户组 可以向各种用户组提供在 ToolsTalk 2中查看或编辑信息的不同权限。 |
控制器软件和数据管理
导出控制器结果和设置。
导入控制器设置。
加载新控制器软件。
切换控制器软件安装。
生成报告。
安排自定义部分的控制器。
导出控制器配置参数,使控制器程序保持不变。
导入新的控制器配置。
软件更新更改了控制器软件。控制器名称、IP 地址和服务器连接可以手动输入。
计划任务
导出控制器结果和设置。
导入控制器设置。
导出和导入任务到所选控制器的计划。
数据库维护
推送控制器配置
导出/导入将更改控制器的配置参数,使控制器程序保持不变。控制器名称、IP 地址和服务器连接不受这些操作的影响。
功能管理系统
将许可的功能添加到控制器。
从控制器移除许可的功能。
管理许可的功能池。
在需要时从 Atlas Copco 加载附加功能,并在不再需要时返回功能。
用户组
创建不同的用户组。
管理查看文件夹和单个控制器的权限。
管理配置 ToolsTalk 2功能的权限。
管理配置控制器参数和功能的权限。
控制器软件和数据管理
控制器软件和数据管理简介
转到系统管理 并选择控制器软件和数据管理
。
导出控制器结果、配置和设置。
导入控制器设置。
加载新控制器软件。
切换控制器软件安装。
生成报告。
安排自定义部分的控制器。
搜索控制器。
导出/导入:更改控制器配置参数,使控制器软件程序保持不变。
软件更新:更改控制器软件,使控制器配置参数保持不变。
控制器名称、IP 地址和服务器连接不受这些操作的影响。
列 | 说明 |
|---|---|
控制器 | 控制器名称。 |
控制器类型 | 应用哪一个控制器类型。 |
工厂端口 | 开启:对于通过工厂端口启用通信的控制器。 如果禁用连接(在控制器设置中设为关闭),则不显示任何文本。 |
当前版本 | 当前软件版本。 红色:软件不在批准的软件列表中。通过点击添加命令按钮并输入当前软件版本将其添加到列表中。 黑色:软件在批准的软件列表中。 |
存储的版本 | 已存储的未启用软件版本。 |
操作 | 显示正在进行的操作,例如: 导入和导出过程中的任务状态和结果以及软件更新任务状态和结果。 |
选中控制器名称左侧的复选框以激活下表列出的选项。
按钮 | 说明 |
|---|---|
重启 | 重启选定的控制器 |
一般报告 | 生成 SoftwareVersionReportcsv.csv 文件并打开对话框弹出窗口提供存储选择。 |
软件 |
|
导出/导入 |
|
按钮 | 说明 |
|---|---|
编辑 | 激活和停用编辑模式用于安排自定义部分。 |
+ | 添加一个自定义部分文件夹或子文件夹。只在编辑模式下可见。 |
- | 删除一个自定义部分文件夹或子文件夹。只在编辑模式下可见。 |
导出和导入功能也存在于控制器配置 和计划导出和导入 中。文件格式和结果是一样的。
工作区窗口的右侧包含授权在控制器中执行的已批准软件的列表。未批准的软件在当前版本列中被标记为红色。
命令 | 说明 |
|---|---|
添加 | 打开快捷菜单,输入新的软件版本到列表中。 |
删除 | 从列表中移除一个或多个选定的软件版本。 |
生成报告创建一个 SoftwareVersionReportcsv.csv 文件,其包含一个矩阵,在列中含有以下信息:
控制器名称。
当前软件版本。
已存储的软件版本。
指出当前软件是否被批准。
如要安排工厂结构中的控制器并访问下方的快捷选项,请点击控制器名称。控制器名称的背景颜色将变成浅蓝色。
一次最多可以选择 20 个控制器。
右键点击控制器以获取以下选项。
快捷方式菜单 | 说明 |
|---|---|
添加新控制器 | 将新控制器添加到工厂结构控制器列表中。 |
连接控制器 | 将控制器状态设置为在线。 |
断开控制器 | 将控制器状态设置为离线。控制器名称将被加上删除线 |
重置操作状态 | 强制重置控制器状态。清除当前状态并重置为空闲。这不会中断已启动的进程,并在连接丢失时充当失效保护。 |
删除 | 从工厂结构控制器列表中删除控制器。 如果从所有控制器文件夹删除一个控制器,那么它将被永久删除。 |
搜索控制器
在控制器软件和数据管理工作区中有两个搜索字段。一个字段仅搜索自定义部分的控制器,另一个字段搜索控制器列表中的所有控制器。
在搜索字段中,至少输入控制器名称的两个字母。
可以搜索控制器名称或类型。在主控制器列表中,还可以搜索软件版本(当前版本)。
导出和导入控制器配置和工具日志
导出/导入功能用于在结果菜单中导出事件和拧紧结果,以供在外部程序中进行分析,以及能够在控制器之间传送拧紧程序、批次和控制器配置。
导出/导入命令可用于下列原因:
导出拧紧结果和事件用于进一步处理。
导出日志文件,以用作 Atlas Copco 服务工程师的调试援助。
导出可用于将配置复制到另一个控制器的完整控制器配置。
比较两个导出的配置以查看差异。
导入控制器配置。
导出
选择系统管理选项卡
 。
。转到控制器软件和数据管理
 。
。选择控制器的复选框
。只有在控制器联机的情况下才能导出控制器配置。选择导出/导入以导出以下其中的一项:
参数
说明
导出
导出所有控制器信息。
导出的文件将有一个文件名和扩展名,就像 <Filename>.tar.gz 这样。
导出配置
导出设置和配置。
导出的文件将有一个文件名和扩展名,就像 <Filename>.tar.gz 这样。
导出工具日志
从已连接的工具导出日志(拧紧和硬件信息)。适用于 SRB、TBP 和 STB。
导出包含 atlas_tool_i.zip 和 ExportInfo.txt
选择保存导出文件的位置,然后选择确定。
文件名包含两部分,一部分用于识别控制器,另一部分用于为时间戳。
导入控制器配置
导入命令的目的是复制控制器设置并重新使用以前导出的源文件,将拥有类似于 <Filename>.tar.gz 的文件名和扩展名。
选择左侧菜单栏中的系统管理
。选择工作区窗口顶部菜单栏中的控制器软件和数据管理
。选择控制器的复选框
。只有在控制器联机的情况下才能导入控制器配置。选择导出/导入。
导入到选定对话窗口打开。
选择打开文件浏览选定的文件。
选择文件然后选择打开。
显示文件路径,导入按钮处于活动状态。选择导入。
重新启动后,导入的文件现在正在使用新的配置设置。
文件导入不会更改控制器的程序。除了出厂 IP 地址,它可以更改每项设置和配置。
更新控制器软件
更新和切换控制器软件是关系密切的两个不同的任务。控制器可以安装两个不同的软件版本,一个主动版本和一个被动版本。在两个版本之间切换是一个简单的过程。切换控制器软件是切换主动和被动软件的任务。
将新软件加载到控制器:
选择系统管理选项卡
。转到控制器软件和数据管理
。选择控制器的复选框
。只有在控制器联机的情况下才能更新控制器软件。从下拉菜单中选择软件,然后选择软件更新。
软件更新对话窗口打开。
选择打开文件浏览选定的文件。
文件名应以 -px2it.zip 结尾
选中文件然后选择打开。
显示文件路径,软件更新按钮处于活动状态。选择按钮开始加载软件。
切换控制器软件
更新和切换控制器软件是关系密切的两个不同的任务。控制器可以安装两个不同的软件版本,一个主动版本和一个被动版本。在两个版本之间切换是一个简单的过程。切换控制器软件是切换主动和被动软件的任务。
激活控制器中存储的软件
选择左侧菜单栏中的系统管理选项卡
。转到控制器软件和数据管理
 。
。选择控制器的复选框
。只有在控制器联机的情况下才能执行命令。从下拉菜单中选择软件,然后选择激活存储的软件。
工作区中的软件更新列将显示以下消息:
正在激活存储的软件。
存储的软件已激活,控制器正在重新启动。
生成控制器软件报告
控制器更新工作区显示所有控制器及其当前运行的软件和存储的软件。
生成文件列表:
选择左侧菜单栏中的系统管理选项卡
。转到控制器软件和数据管理
。选择生成报告。
浏览器对话窗口打开。
选择文件位置并选择保存。
SoftwareVersionResultcsv.csv 文件将被写入选定位置。
管理自定义部分
转到系统管理选项卡
,然后选择控制器软件和数据管理
。在自定义部分,选择编辑
 进入编辑模式。编辑会将颜色更改为浅蓝色以表示它已被选中,并出现两个新按钮,a + 和 a -
进入编辑模式。编辑会将颜色更改为浅蓝色以表示它已被选中,并出现两个新按钮,a + 和 a -  。
。
在编辑模式下,以下安排选项可用:
创建新文件夹
创建新的子文件夹
删除文件夹或子文件夹
将控制器复制到文件夹
更改文件夹和控制器的显示顺序
如要退出编辑模式:
选择编辑退出编辑模式。编辑将改变颜色,+ 和 - 按钮将消失。
创建新文件夹
在编辑按钮的左侧,选择 + 按钮
或者
右键点击文件夹区域中的任意位置,然后在快捷菜单中选择添加文件夹。
将创建一个新文件夹并将其添加到列表中。
选择新文件夹。颜色将变为浅蓝色,表示已被选中。
按 F2 重新命名文件夹,然后按回车键。
创建新的子文件夹
在文件夹名称的右侧,点击 + 按钮
或者
右键点击现有文件夹,然后选择快捷菜单中的添加文件夹。
将创建一个新文件夹并将其添加到列表中。
选择新文件夹。颜色将变为浅蓝色,表示已被选中。
按 F2 重新命名文件夹,然后按回车键。
删除文件夹或子文件夹
在文件夹名称的右侧,选择 - 按钮
或者
右键点击现有文件夹,然后点击快捷菜单中的删除。
该文件夹将被删除,控制器的副本将被删除。
当包含子文件夹的文件夹被删除时,所有子文件夹也被删除。
将控制器复制到文件夹
从控制器列表上方的下拉菜单中选择所有控制器或相应的自定义部分。
选择控制器。其颜色变为浅蓝色,表示已被选中。
可以选择一个或多个控制器。
按 Ctrl+ 左键点击以在选择时添加一个控制器。
按 Shift+ 左键点击以在选择时添加多个控制器。
将所选控制器拖到目标文件夹。
更改文件夹和控制器的顺序
将所选文件夹或控制器拖到新的位置。
计划任务
转到系统管理选项卡 ,然后选择计划任务 。工作区显示以下信息。
。工作区显示以下信息。
列 | 说明 |
|---|---|
复选框 | 使用复选框选择任务。 |
名称 | 任务类型。 |
最后更改 | 最新更改的时间戳。 |
更改人 | 更改任务的人。 |
最近一次运行 | 最后一次执行任务的时间。 |
正在运行 | 当前运行的任务的状态信息。 |
命令 | 说明 |
|---|---|
立即执行 | 可以选择一个或多个任务并强制立即执行任务,无需等待设置的预定日期和时间。必须定义备份位置设置,以便“立即执行”能够工作。 |
添加 | 创建一个新任务。选择任务类型。 |
删除 | 从任务表删除一个或多个任务。 |
右侧的控制器列表显示哪一个控制器受到了计划任务的影响。仅当选择了一个或多个任务时才会显示该列表。
管理计划任务
转到系统管理
。转到计划任务
。
双击现有任务以查看配置。
菜单 | 说明 |
|---|---|
属性 | 为任务分配一个名称和说明。 |
日程表 | 任务的时间和间隔设置。 |
控制器 | 选择哪些控制器受任务影响。 |
结果 | 任务结果。 |
导入文件 | 仅当任务类型为导入控制器配置时才可见。 |
备份位置 | 仅当任务类型为导出控制器配置时才可见。 |
添加新的计划任务
选择添加。
选择一个计划任务类型:
导出控制器配置
导入控制器配置
数据库维护
推送控制器配置
导出许可证分发
立即执行
选择相应的复选框选择任务。
选择立即执行以便立即运行任务。
删除计划任务
选择相应的复选框选择一个任务,然后选择删除以移除所选任务。
已删除的任务将从计划任务列表中移除。
编辑计划任务
双击要编辑的任务。
编辑计划任务。
更改将自动保存,无需推送。
导出和导入功能也存在于控制器配置 和控制器软件和数据管理 中。这两种情况的文件格式和结果是一样的。
控制器选择
对导入、导出和推送控制器配置计划任务有效。
选择运行计划任务的控制器。
参数 | 说明 |
|---|---|
计划所有控制器 | 当设为是时,计划任务将在连接到 ToolsTalk 2 并且在工厂结构 当设置为是时,控制器列表将不可见。 当设置为否时,控制器列表将可见,并且可以单独选择。 |
全部切换 | 所有控制器都会自动选中,任务将在所有控制器上运行。 可以取消选择单独的控制器。 |
| 选择运行计划任务的控制器。任务将仅影响选定的控制器。 |
全部切换和计划所有控制器之间的重要区别:
全部切换 |
|---|
易于选择或取消选择单个控制器。 静态列表。如果添加了新的控制器,它们不会自动包含在内。 |
计划所有控制器 |
|---|
所连接控制器的结构的任何变化都不会改变计划任务。 动态列表,所有控制器将受到影响。 |
重要注意事项:
如果使用相同的导入文件导入到多个控制器,则控制器名称字段将被导入文件中的控制器名称覆盖。导致所有控制器具有相同的名称。
含有已命名控制器的进一步导入或导出将失败,因为名称将不再被识别。
解决这个问题的一种方法是将计划所有控制器设为是。
导出控制器配置
如果计划任务类型为导出控制器配置,则此菜单可见。
参数 | 说明 |
|---|---|
备份位置 | 输入要写入导出文件的位置的有效路径。默认值为空,错误指示符 执行计划任务时,路径必须有效。 |
文件名 | 导出的文件格式如下:*.tar.gz 稍后可将其用于将配置导入控制器或发送到 Atlas Copco 进行调试或故障分析。 默认文件名类似于 PFExport_<controller-name>_<Date-code>.tar.gz。 系统变量可用于区分和创建独一无二的文件名。 |
按控制器分类的文件夹 | 当设为是时,每次导出将被保存在单独的子文件夹中。 当设为否时,导出将被保存在保存位置文件夹中。 |
文件夹名称 | 系统变量可用于区分和创建独一无二的文件夹名。 |
系统变量可用于指定导出的文件名和文件夹名称。它们在运行时添加到文件名或文件夹以创建唯一的导出文件或位置。
系统变量写在括号内,可以使用以下内容:
[ControllerName]
[IpAddress]
[ControllerSerialNumber]
可以将文本与系统变量组合。例如 Station_3_[ControllerName]_[IpAddress]。如果控制器名称为 ABC,其 IP 地址为 10.25.25.180,则运行时生成的文件名将为 Station_3_ABC_10.25.25.180.tar.gz。
仅当控制器在导出时处于联机状态并且导出路径有效时,才能进行计划的文件导出。
参数 | 说明 |
|---|---|
已启用 | 当设为是时,计划任务将根据计划配置运行。 当设为否时,计划任务将不运行。 |
工作日 | 在任务运行时标记一个或多个工作日。 |
时间 | 从下拉菜单中选择一个运行时间。 |
起始日期 | 从日历图标中选择运行时间的开始日期。 |
选择结束日期 | 当设为是时,计划任务将根据计划运行直至结束日期。 当设为否时,计划任务将根据计划从开始日期运行。 |
执行任务后,结果显示在结果菜单中。
参数 | 说明 |
|---|---|
状态 | 运行任务后的计划任务状态可能显示 OK 或 NOK。 |
控制器 | 如果适用于任务,则显示。 |
最近一次运行 | 执行计划任务的时间和日期。 |
错误 | 如果状态为 NOK,则显示错误代码示例。
|
导入控制器配置
如果计划任务类型为导入控制器配置,则此菜单可见。
菜单项目 | 说明 |
|---|---|
文件名 | 文件和名称必须是先前导出的配置文件。它的格式必须为:*.tar.gz |
浏览 | 该命令打开浏览器窗口以查找要导入的文件。 |
文件加载到 ToolsTalk 2中,计划任务按计划的时间运行。
文件导入不会更改控制器的程序。除了出厂 IP 地址,它可以更改每项设置和配置。
计划的文件导入仅当控制器在导入时处于联机状态时才会出现。
参数 | 说明 |
|---|---|
已启用 | 当设为是时,计划任务将根据计划配置运行。 当设为否时,计划任务将不运行。 |
工作日 | 在任务运行时标记一个或多个工作日。 |
时间 | 从下拉菜单中选择一个运行时间。 |
起始日期 | 从日历图标中选择运行时间的开始日期。 |
选择结束日期 | 当设为是时,计划任务将根据计划运行直至结束日期。 当设为否时,计划任务将根据计划从开始日期运行。 |
执行任务后,结果显示在结果菜单中。
参数 | 说明 |
|---|---|
状态 | 运行任务后的计划任务状态可能显示 OK 或 NOK。 |
控制器 | 如果适用于任务,则显示。 |
最近一次运行 | 执行计划任务的时间和日期。 |
错误 | 如果状态为 NOK,则显示错误代码示例。
|
数据库维护
控制器配置、库、拧紧程序、设备设置、结果等事件会自动添加到数据库中先前保存的事件中。为了清理数据库以便节省空间并使系统更加高效,可以删除历史数据,只保留所有事件的最新结果。可以在数据库维护功能中安排所有事件最新结果的拍“快照”。
存档数据:选择是将历史数据保存(存档)到数据库中。如果选择否,历史数据将在每次快照后被删除。请注意,无论如何,拍摄的快照的结果将被保存。
一次只能定义一个数据库维护任务类型的实例。
参数 | 说明 |
|---|---|
已启用 | 当设为是时,计划任务将根据计划配置运行。 当设为否时,计划任务将不运行。 |
工作日 | 在任务运行时标记一个或多个工作日。 |
时间 | 从下拉菜单中选择一个运行时间。 |
起始日期 | 从日历图标中选择运行时间的开始日期。 |
选择结束日期 | 当设为是时,计划任务将根据计划运行直至结束日期。 当设为否时,计划任务将根据计划从开始日期运行。 |
执行任务后,结果显示在结果菜单中。
参数 | 说明 |
|---|---|
状态 | 运行任务后的计划任务状态可能显示 OK 或 NOK。 |
控制器 | 如果适用于任务,则显示。 |
最近一次运行 | 执行计划任务的时间和日期。 |
错误 | 如果状态为 NOK,则显示错误代码示例。
|
推送控制器配置
如果选择了计划任务类型来推送控制器配置,则此菜单可见。
参数 | 说明 |
|---|---|
已启用 | 当设为是时,计划任务将根据计划配置运行。 当设为否时,计划任务将不运行。 |
工作日 | 在任务运行时标记一个或多个工作日。 |
时间 | 从下拉菜单中选择一个运行时间。 |
起始日期 | 从日历图标中选择运行时间的开始日期。 |
选择结束日期 | 当设为是时,计划任务将根据计划运行直至结束日期。 当设为否时,计划任务将根据计划从开始日期运行。 |
执行任务后,结果显示在结果菜单中。
参数 | 说明 |
|---|---|
状态 | 运行任务后的计划任务状态可能显示 OK 或 NOK。 |
控制器 | 如果适用于任务,则显示。 |
最近一次运行 | 执行计划任务的时间和日期。 |
错误 | 如果状态为 NOK,则显示错误代码示例。
|
备份许可证分发
此计划任务用于定期创建许可证分发的备份。备份存储在 ToolsTalk2 服务器上,如果 ToolsTalk 2 许可证降级,则可以使用备份再次还原带有保留许可证的控制器。
一次只能定义备份许可证分发任务类型的一个实例。
设置备份许可证分发任务。
属性
名称
输入备份的名称。
说明
为备份输入一段说明。
日程表
已启用
当设为是时,计划任务将根据计划配置运行。
当设为否时,计划任务将不运行。
工作日
在任务运行时标记一个或多个工作日。
时间
从下拉菜单中选择一个运行时间。
起始日期
从日历图标中选择运行时间的开始日期。
选择结束日期
当设为是时,计划任务将根据计划运行直至结束日期。
当设为否时,计划任务将根据计划从开始日期运行。
备份位置
文件名
为备份输入一个文件名称。
结果
状态
运行任务后的计划任务状态可能显示 OK 或 NOK。
最近一次运行
执行计划任务的时间和日期。
错误
NoWriteAccessToStorage
ExportFailed
TimedOut
从备份还原许可证分发
如果 ToolsTalk2 许可证降级,则可以使用许可证分发备份来将许可证分发再次还原到控制器。先下载许可证分发备份,然后导入下载的备份来执行还原。
下载许可证分发备份
选择系统管理选项卡
,然后转到计划任务选项卡 。在工作区中,双击备份许可证分发任务。
在结果中,选择
 下载要还原的许可证分发备份。
下载要还原的许可证分发备份。在另存为对话框中,浏览下载位置,然后选择保存。
导入许可证分发备份
现在可以使用许可证分发导入功能,通过功能管理系统选项卡  来访问供导入的已下载文件。
来访问供导入的已下载文件。
功能管理系统 (FMS)
功能管理系统介绍
在通过动态许可方案需要附加功能时,Functionality Management System(功能管理系统,FMS)将允许 Atlas Copco 客户使用所需的其他功能。
在收到采购订单后,Atlas Copco License Portal(Atlas Copco 许可证门户网站,ACLP)中的客户帐户在 24 小时内会自动接收到所购功能并可以许可证文件的形式下载这些功能。
将此功能文件(包含在许可证协议中)加载到 Local License Server (本地许可证服务器,LLS),在此进行解码并进行分配。
随之创建可以在许多控制器中使用的功能池。在需要时,可以将所需的功能项上传至控制器;当不再需要时,功能项会自动回到功能池。
在 Atlas Copco 许可证门户网站(ACLP),可以管理具有所有功能、权限的帐户并从许可证服务器返回许可证或将其返回至许可证服务器。
本文件不涉及在 ACLP 中创建和管理客户帐户。
功能管理系统定义
许可证分发 | 功能 |
|---|---|
本地许可服务器 (LLS) | 容纳功能项池以及可将功能项分发给控制器中的许可证管理器的单元。 |
Atlas Copco 许可证门户网站 (ACLP) | 可向客户发送包含所有所需功能项的许可证文件的单元。 |
许可证 | 功能项的访问权限。许可证规定了如何使用功能项的条件。 |
许可管理器 | 控制器中的功能,用于加载、管理和返回功能项。 |
虚拟站点类型 | 捆绑在一起的固定功能集的许可证。可以完整地分配到虚拟站点。 |
虚拟站点特征 | 单个控制器功能的许可证,例如,TurboTight 或 TrueAngle。 |
控制器特征 | 控制器范围功能的许可证,例如 Step Sync 或 Soft PLC。它们按控制器分配,不限于该控制器上的任何虚拟站点。 |
功能项 | 一个可以加载到控制器中以提供附加功能的软件代码。许可协议覆盖使用条件。 |
智能应用模块 (IAM) | 包含所有控制器程序、配置和结果的存储模块。某些模块还可能包括额外加载的功能项。 |
预留列表 | 分发服务器有一个功能项池。其中一些被分发给控制器,一些可自由分发。预留列表包含有关功能项分发方式的信息。 |
借用时间 | 适用于联网分发环境。控制器必须定期通过 LLS 检查,并将其功能项与预留列表同步。 |
过期许可证 | 控制器配置或程序可能会发生更改,加载的功能项与预留列表的内容之间可能会发生不匹配。在这种情况下,如果使用已在控制器上过期的功能项,将显示错误事件。 |
功能文件 | 从 ACLP 下载的二进制文件。它包含所有有效的功能项。当它被解码并存储在服务器上时,功能项池可用于分发给控制器。 |
编辑许可证类型和特征的分发
可以在控制器中添加或删除可用的许可证类型和特征。
选择系统管理选项卡
。选择功能管理系统选项卡
以显示控制器上许可证分发的概述。为特定控制器选择编辑按钮
 。一个包含可用许可证类型和特征的对话窗口将打开。
。一个包含可用许可证类型和特征的对话窗口将打开。选择每个选项卡以输入控制器上应有的每个许可证类型或特征的计数。
选择确定保存并继续。
管理许可证分发
ToolsTalk2 服务器自动存储上次成功的许可证分发状态的内部备份。可以从系统中导出此备份。
如果 ToolsTalk2 许可证降级,托管的 Flexera 许可证服务数据库已被重置(删除),则必须从 Atlas Copco Customer License Portal (ACLP) 生成一个新的许可证文件,并通过功能管理系统选项卡 上传到 ToolsTalk2。重置数据库后,许可证分发也将重置,并且必须还原。使用导出/导入许可证分发执行还原。
选择系统管理选项卡
,然后选择功能管理系统选项卡 。选择管理按钮,然后从列表中选择许可证分发...。
选择导出选项卡。
指定导出位置,然后选择导出。
导入许可证分发要求首先上传许可证文件,以便系统知道可分发多少许可证。
选择系统管理选项卡
,然后选择功能管理系统选项卡 。选择管理按钮,然后从列表中选择许可证分发...。
选择导入选项卡。
浏览到导入文件位置,然后选择导入。
 警告!此操作将删除所有现有的保留,并将许可证分发还原到导入文件中的状态。
警告!此操作将删除所有现有的保留,并将许可证分发还原到导入文件中的状态。
特征项目的分发
在功能管理系统 (FMS) 工作区,用户可以管理连接到本地许可证服务器 (LLS),并在线连接到 ToolsTalk 2 服务器的所有控制器中的许可证。
选择系统管理选项卡
。选择功能管理系统选项卡
以显示控制器上许可证分发的概述。
以下视图和信息假设已从 Atlas Copco 接收到能力文件,并将其加载到 LLS 中。
许可证分发概述
许可证分配概述由几个子选项卡组成,下面将对其进行说明。
控制器
控制器子选项卡显示在控制器之间分布的许可特征项目池。有关更详细的概述,请选择特定的行以将其展开并查看控制器的当前功能
列 | 功能 |
|---|---|
编辑 | 编辑控制器上分发的许可证数量。 |
控制器 | 分配给控制器的名称。 |
虚拟站点类型 | 分发给每个控制器中的许可证数量(按类型)。 |
虚拟站点特征 | 每个虚拟站点中存在的特征。 |
控制器特征 | 每个控制器中存在的特征。 |
虚拟站点类型
虚拟站点类型子选项卡显示在各个控制器之间分发的许可虚拟站点特征类型池。
列 | 功能 |
|---|---|
虚拟站点类型 | 许可证类型。 |
控制器名称 | 分配给控制器的名称。 |
计数 | 分配给控制器的许可特征类型的数量。 |
可用 | 可分配给控制器的许可特征类型的数量。 |
已激活控制器 | 许可特征类型处于活动状态的控制器的数量。 |
已保留 | 保留许可特征类型的控制器数量。 从 ToolsTalk 2 将许可证分配给控制器后,该许可证将在许可证服务器中为该控制器保留。当控制器连接并与许可证服务器同步时,许可证将处于已保留和在控制器上两种状态。 |
总数 | 可用的许可特征类型总数。 |
虚拟站点特征
虚拟站点特征子选项卡显示在各个控制器之间分布的许可虚拟站点特征项目池。
列 | 功能 |
|---|---|
虚拟站点特征 | 特征类型 |
控制器名称 | 分配给控制器的名称。 |
计数 | 分配给控制器的许可特征项目的数量。 |
可用 | 可分配给控制器的许可特征项目的数量。 |
已激活控制器 | 许可特征项目处于活动状态的控制器数量。 |
已保留 | 保留许可特征类型的控制器数量。 从 ToolsTalk 2 将许可证分配给控制器后,该许可证将在许可证服务器中为该控制器保留。当控制器连接并与许可证服务器同步时,许可证将处于已保留和在控制器上两种状态。 |
总数 | 可用的许可特征项目总数。 |
控制器特征
控制器特征子选项卡显示分布在各个控制器上的许可控制器特征项目池,这些特征项目由工具许可证决定
列 | 功能 |
|---|---|
控制器特征 | 特征类型 |
控制器名称 | 分配给控制器的名称。 |
计数 | 分配给控制器的许可特征项目的数量。 |
可用 | 可分配给控制器的许可特征项目的数量。 |
已激活控制器 | 许可特征项目处于活动状态的控制器数量。 |
已保留 | 保留许可特征类型的控制器数量。 从 ToolsTalk 2 将许可证分配给控制器后,该许可证将在许可证服务器中为该控制器保留。当控制器连接并与许可证服务器同步时,许可证将处于已保留和在控制器上两种状态。 |
总数 | 可用的许可特征项目总数。 |
FMS 便携式
FMS 便携式子选项卡显示了跨控制器分布的 FMS 便携式设备的数量。
列 | 功能 |
|---|---|
FMS 便携式 | FMS 便携式设备的 ID 号。 |
控制器名称 | 分配给控制器的名称。 |
FMS 工作区特征
命令按钮
命令按钮 | 功能 |
|---|---|
管理 |
|
能力文件是包含许可证项的二进制文件。文件在 Atlas Copco 许可门户 (ACLP) 中创建并下载到客户。在分发服务器中解码时,将创建特征池,可以通过两种方式分发给控制器:
使用通过 ToolsTalk 2 用户界面控制的功能管理系统服务器的联网分发系统。
使用插入到每个控制器并通过控制器用户界面进行管理的安全 U 盘的手动分发系统。它在控制器文档中有详细说明。
一般信息
列 | 功能 |
|---|---|
主机 ID | 加载了功能文件的分发服务器的唯一身份。 |
ToolsTalk2 许可证 | 当前功能级别的名称。 |
ToolsTalk2 虚拟站点 | 已配置的虚拟站点数量/可用于配置的虚拟站点总数 |
编辑许可证类型和特征的分发
可以在控制器中添加或删除可用的许可证类型和特征。
选择系统管理选项卡
。选择功能管理系统选项卡
以显示控制器上许可证分发的概述。为特定控制器选择编辑按钮
。一个包含可用许可证类型和特征的对话窗口将打开。选择每个选项卡以输入控制器上应有的每个许可证类型或特征的计数。
选择确定保存并继续。
比较配置
通过上传配置文件进行比较,可以快速比较两种配置。必须先导出文件。导出配置可以在:
系统管理
部分控制器软件和数据管理
中完成。或在:
控制器部分
完成。
比较两种配置:
转到系统管理
选项卡,然后点击比较配置
 。
。选择浏览按钮找到并上传文件。
导出的文件将有一个文件名和扩展名,就像 <Filename>.tar.gz 这样。
选择第二个浏览按钮,找到与第一个文件进行比较的文件。
选择比较。
工作区显示两个选定配置的参数列表。两个配置完全相同的参数将出现,但不突出显示。与其他文件不同的参数以黄色突出显示。
用户组
用户组概览
此功能仅对具有 ToolsTalk 2 中的管理员权限的用户可见。
ToolsTalk 2 中的用户组功能提供以下功能:
创建或删除用户组。
为文件夹和控制器分配用户访问权限。
分配用户权限以更改控制器配置和参数设置。
分配用户权限将库函数分发到多个控制器和 ToolsTalk 2 管理任务。
查看用户组:
选择左侧菜单栏中的系统管理
。选择顶部菜单栏中的用户组
 。
。
工作区表中的每一行表示可以赋予不同用户权限的一个用户组。
列标题从左到右依次为:
列 | 说明 |
|---|---|
复选框 | 如要选择或取消选择用户组。 |
名称 | 用户组名称。 |
说明 | 可选字段。 |
AD 分组 | 活动目录组名。由 IT 部门创建。 |
| 不是实际的列。 配置列表可以按字母顺序、数字顺序或时间顺序升序或降序排列。点击表标题行使箭头可见,然后点击箭头更改当前排序方向。一次显示一个箭头。 |
表中的顶行名为管理员。无法删除该用户组。
命令 | 说明 |
|---|---|
添加 | 创建一个新的用户组。将打开一个对话窗口。 |
删除 | 从组表删除一个或多个用户组。 |
用户组先决条件
可以在 ToolsTalk 2 中创建多个用户组。每个用户组可以被赋予不同的用户权限,以在 ToolsTalk 2 中创建、读取、更新和删除参数、配置和文件夹。
公司 IT 部门的网络管理员必须创建一个或多个活动目录 (AD) 组。AD 组可分配给 ToolsTalk 2 中的一个用户组。ToolsTalk 2 中的每个用户组都可以被赋予一组唯一的用户权限。
因此,必须为 ToolsTalk 2 用户权限的每个组合创建一个 AD 组。各用户被分配到一个或多个 AD 组。用户组中的所有成员具有与 ToolsTalk 2 中相同的用户权限
比如,创建以下四个组:
-
第 1 生产线的操作员。
-
第 1 生产线的管理人员。
-
工厂生产工程师。
-
生产质量经理。
各用户被分配到一个或多个组。
还可在 ToolsTalk 2 中创建四个用户组(使用相同的组名)。为每个用户组分配一个 AD 组。创建以下用户权限:
-
第 1 生产线的操作员,只能看到第 1 生产线的拧紧结果,不能更改任何配置参数。
-
第 1 生产线的管理人员,可以看到所有控制器,具有额外的用户权限来更改第 1 生产线上的控制器的配置参数。
-
工厂生产工程师,可更改第 1 生产线和第 2 生产线上的配置参数,但是不能查看所有拧紧结果。
-
生产质量经理,可以看到整个工厂的所有拧紧结果和事件日志。
创建、删除或编辑用户组
选择左侧菜单栏中的系统管理图标
。选择顶部菜单栏中的用户组图标
。工作区窗口显示用户组表。
要删除用户组,选择复选框
然后点击删除。要编辑用户组的用户权限,请双击表中的行。工作区显示配置菜单。
如要添加新的用户组,点击添加。将显示创建组弹出窗口,以下参数必须输入:
用户组名称。
可选的用户组说明。
现有 AD 组的名称。
选择添加以保存并关闭窗口。
工作区窗口显示更新的用户组表。
列 | 说明 |
|---|---|
名称 | 用户组的 ToolsTalk 2名称 |
说明 | 可选的信息字段。 |
AD 分组 | 活动目录组名称,由 IT 部门创建。包含必须具有访问 ToolsTalk 2服务器的用户权限的个人用户。 |
启用 是/否 | 仅对超级管理员凭据有效。 此功能在降级期间禁用用户组,而不是删除它们。
如果升级后已启用未设置为是,则客户端将无法为该组中的特定用户启动,并显示您无权访问该应用程序警告。 |
用户组权限菜单
选择左侧菜单栏中的系统管理图标
。选择顶部菜单栏中的用户组图标
。工作区窗口显示用户组表。
双击表中的一行以启用用户组的编辑。
组权限菜单有三个选项卡来设置用户权限。
列 | 说明 |
|---|---|
文件夹 | 为用户分配访问和修改工厂结构中的文件夹的权限。 |
控制器 | 为用户分配访问和修改所选文件夹中的控制器的权限。 |
全局功能 | 为用户分配执行 ToolsTalk 2 系统管理任务和全局库函数的权限。 |
选择文件夹选项卡,并选择用户组可以访问哪一个文件夹。
如果文件夹不可见,则文件夹中包含的控制器无法访问。
选择控制器选项卡,然后选择该组在控制器上具有的用户权限。
如果控制器可见,则可以读取所有配置和参数。
选择全局功能选项卡,并选择用户组在 ToolsTalk 2 中可以访问哪些全局功能。
文件夹用户权限
用户权限中的第一步是分配工厂结构 中的哪些文件夹可访问。
选择左侧菜单栏中的系统管理图标
。选择顶部菜单栏中的用户组图标
。工作区窗口显示用户组表。
双击表中的一行以显示菜单供编辑。
在组权限菜单中单击所需的选项卡。
为所选的用户组设置所需的用户权限。选中的复选框
表示该功能处于活动状态。可能的组合在表中进行了说明。
更改会自动保存。
工厂结构包含一个名为所有控制器的文件夹。此文件夹包含连接到 ToolsTalk 2 服务器的所有控制器。
可以创建自定义的文件夹和子文件夹,以提高可见性和控制器的逻辑分组。
参数 | 说明 | 条件 |
|---|---|---|
所有文件夹上的权限相同 | 单选按钮 如果选中,所选的用户权限适用于工厂结构中的所有文件夹(新增)。 | 如果未选中: 如果更改了工厂结构,可能需要更新某些文件夹的用户权限。 |
为各文件夹手动设定权限 | 如果选中,所选择的用户权限仅适用于工厂结构中的选定文件夹。 | |
读取 | 复选框 用户组可查看文件夹及其内容。 | 如果未选中: 文件夹及其内容对用户组不可见。 |
更新 | 复选框 用户组可以从文件夹移动、复制和删除控制器或反之。 | |
创建和删除 | 复选框 使用文件夹的创建和删除权限,用户可以创建和删除文件夹中的子文件夹。 通过所有控制器文件夹的创建和删除权限,用户还可以从 ToolsTalk 2 中删除控制器。 通过所有文件夹(包括新增)的创建和删除权限,用户还可以删除主文件夹。 |
没有标记用户权限的文件夹对于工厂结构 中的用户组是不可见的。
文件夹的最低用户权限级别为读取。此级别使文件夹可见,其子文件夹和控制器的内容也可见。
如果控制器可见,则可以至少读取其配置和参数。可以向用户组分配其他用户权限。
控制器用户权限
用户权限的第二步是分配组在可在工厂结构 中访问的所选控制器上有哪些权限。
如果控制器可见,则可以读取配置和参数。可以向用户组提供其他指定的用户权限。
选择左侧菜单栏中的系统管理图标
。选择顶部菜单栏中的用户组图标
。工作区窗口显示用户组表。
双击表中的一行以显示菜单供编辑。
在组权限菜单中单击所需的选项卡。
为所选的用户组设置所需的用户权限。选中的复选框
表示该功能处于活动状态。可能的组合在表中进行了说明。
更改会自动保存。
参数 | 说明 | 条件 |
|---|---|---|
所有控制器(新增)权限相同 | 单选按钮 如果选中,所选的用户权限适用于工厂结构中的所有可见控制器(新增)。 | 如果未选中: 如果更改了工厂结构,例如,如果添加了新的控制器,则需要更新控制器的用户权限。 |
为各控制器手动设定权限 | 单选按钮 如果选中,所选择的用户权限仅适用于工厂结构中的选定控制器。 | |
更新 | 复选框 用户组的成员可以:
| |
创建和删除 | 复选框 用户组“创建和删除”的成员具有以下权限:
| |
| 打开文件夹并显示内容。 | |
 | 关闭文件夹并隐藏内容。 | |
(X/Y) | 在所选中的文件夹中的所有 Y 个控制器中,有 X 个控制器拥有所选的权限 |
没有标记用户权限的文件夹对于工厂结构 中的用户组是不可见的。
文件夹的最低用户权限级别为读取。此级别使文件夹可见,其子文件夹和控制器的内容也可见。
如果控制器可见,则可以至少读取其配置和参数。可以向用户组分配其他用户权限。
全局功能用户权限
用户权限中的第三步是分配 ToolsTalk 2中的哪些全局功能可访问。
选择左侧菜单栏中的系统管理图标
。选择顶部菜单栏中的用户组图标
。工作区窗口显示用户组表。
双击表中的一行以显示菜单供编辑。
在组权限菜单中单击所需的选项卡。
为所选的用户组设置所需的用户权限。选中的复选框
表示该功能处于活动状态。可能的组合在表中进行了说明。
更改会自动保存。
如果用户组拥有控制器的创建和删除用户权限级别,则可以创建和编辑所有控制器配置。
全局功能是一组 ToolsTalk 2 管理功能和库函数,其图标位于左侧菜单中。用户组可被赋予对全局功能的不同用户权限。
如果某个功能不允许使用用户权限,则用户无法访问该功能,且看不到该图标。
功能 | 选择 | 说明 |
|---|---|---|
全局功能:报告  | ||
结果  | 已启用 | 如果选中,用户组可以看到所选控制器的结果工作区。 如果未选中,则图标在 ToolsTalk 2中不可见 |
事件 | 已启用 | 如果选中,用户组可以看到所选控制器的事件工作区。 如果未选中,则图标在 ToolsTalk 2中不可见 |
功能 | 选择 | 说明 |
|---|---|---|
全局功能:系统管理  | ||
计划导出和导入 | 已启用 | 如果选中,用户组可以查看和配置用于计划导出和导入配置和参数的参数。 如果未选中,则图标在 ToolsTalk 2中不可见 |
控制器软件和数据管理 | 已启用 | 如果选中,用户组可以查看并配置所选控制器的软件更新。 如果未选中,则图标在 ToolsTalk 2中不可见 |
功能管理系统 | 已启用 | 如果选中,用户组可以管理许可的功能,并从选定的控制器加载和移除功能。 如果未选中,则图标在 ToolsTalk 2中不可见 |
用户组管理 | 已启用 | 如果选中,用户组可以查看和配置用户组用户权限。 如果未选中,则图标在 ToolsTalk 2中不可见 |
计划批准
| 已启用 | 如果已标记,则用户组可以发送程序以供批准,也可以批准或拒绝程序。 如果未选中,则图标在 ToolsTalk 2中不可见。 |
功能 | 选择 | 说明 |
|---|---|---|
全局功能:库  | ||
控制器配置库 程序库 配置库 现场总线库 | 读取 | 如果选中,用户组可以查看和读取库中的参数。 如果未选中,则图标在 ToolsTalk 2中不可见 |
控制器配置库 程序库 配置库 现场总线库 | 更新 | 如果选中,用户组可以查看和编辑库中的参数。订阅库的控制器将自动更新。 |
控制器配置库 程序库 配置库 现场总线库 | 创建和删除 | 如果选中,用户组可以创建、编辑和删除库中的配置。订阅库的控制器将自动更新。 |
控制器配置库 程序库 配置库 现场总线库 | 分配 | 如果选中,用户组可以创建、编辑和删除库中的配置。订阅库的控制器将自动更新。 此外,分发用户权限允许用户组将全局配置分发给先前未订阅库配置的控制器。 全局配置将在受影响的控制器中创建。 |
程序批准
本节介绍了拧紧或拧松程序的批准过程。程序批准由具有批准权限的用户管理,适用于 Power Focus 6000、PF6 FlexSystem 和 StepSync 控制器。
发送程序供批准
在工厂结构工作区
中选择一个控制器。在工具栏上,选择拧紧程序
。拧紧程序概述显示拧紧程序列表。
选中需要发送以供批准的程序的复选框。
只有已推送到控制器的程序才能发送以供批准。
选择管理,然后选择发送供批准。
现在可以看到该程序,并可以在程序批准
 选项卡中批准或拒绝该程序。
选项卡中批准或拒绝该程序。
复制和粘贴拧紧程序不会复制批准状态。复制的程序的状态为未定义。
程序批准工作区
转到系统管理,
然后选择程序批准。程序批准概述显示了具有待定程序批准的控制器列表。
选择控制器以展开并查看程序列表。
列 | 说明 |
|---|---|
复选框 | 勾选复选框选择程序。 |
名称 | 拧紧或拧松程序的名称。 |
最后更改 | 最后进行的更改,用 ToolsTalk 2时间表示。 |
更改人 | 指出进行最后更改的是哪个用户。 |
最后批准 | 对程序最后进行的批准,以控制器时间表示。 |
最后批准人 | 指示哪个用户最后批准了该程序。 |
批准状态 | 程序的批准状态。 |
审批状态
状态 | 说明 |
|---|---|
未定义 | 在 ToolsTalk 2软件和控制器中创建的所有新程序的状态均为未定义。 |
待批准 | 该程序已发送以供批准。 |
已批准 | 该程序已批准,可以在控制器上使用。 |
未批准 | 程序正在更改/优化。程序一旦完成就可以发送以供批准。 |
已拒绝 | 程序被批准人拒绝,需要更正。 |
不论批准状态如何,都可以使用所有程序。批准状态不影响任何程序的操作功能。
程序进入批准工作流程后,它将始终具有一个状态。只有从未发送供批准的程序的状态为“未定义”
批准或拒绝程序
只有具有程序批准用户权限的用户才能批准或拒绝发送供批准的程序。此功能仅在许可证级别 Line Manager 中可用。
转到系统管理,
然后选择程序批准。程序批准概述显示了具有待定程序批准的控制器列表。
选择控制器以展开并查看程序列表。
选中您要批准/拒绝的程序的复选框。
选择管理,然后选择批准或拒绝。
使用推送配置更改
ToolsTalk 2 包含连接到 ToolsTalk 2 服务器的每个控制器的镜像数据。数据在初次连接、重新连接或在控制器或 web 界面中进行任何配置时将自动从控制器复制到 ToolsTalk 2。
从 ToolsTalk 2 到控制器的数据不会自动发送。操作员必须将数据推送到控制器才能应用更改。
脱机的控制器可以通过 ToolsTalk 2 应用程序更改其配置设置或参数值,然后将数据存储起来稍后再推送。
如果在 ToolsTalk 2 中更改了任何配置设置,则推送指示符 将显示在结构列表中的控制器名称旁,以及已更改的拧紧程序旁。
无论控制器是联机还是脱机,都可以在 ToolsTalk 2 界面中进行配置。
配置只能在联机状态下推送到控制器。如果控制器脱机,则忽略该命令。
可以同时对多个控制器进行推送。
推送命令成功执行后,指示符
消失。
将配置推送到控制器
有多种不同方法可以将更改推送到控制器:
选择控制器列表中的控制器名称旁的推送指示符图标
。
在选项卡菜单中选择管理按钮,然后从下拉列表中选择推送更改。
选择顶部信息栏中的推送更改按钮。
选择后,要推送的控制器对话窗口将出现。
有一些可选的配置推送方式:

A
选择此复选框以便立即推送所有配置。这将适用于列表中的所有控制器。
B
所选控制器的所有配置将被推送。勾选相应的复选框选择控制器。
C
展开控制器的配置列表,选择要推送的配置。选择的配置被推送之后,剩下的配置将仍然留在列表中。
选择推送命令按钮 (D)。
选择取消或关闭窗口退出。
还原控制器配置
ToolsTalk 2 应用程序中所做的更改将自动保存。推送标记 表示已对控制器进行了更改,但尚未推送。
从下拉菜单中选择管理按钮,然后选择恢复。
在恢复控制器警告对话框中,选择确定以恢复控制器配置,或选择取消以取消恢复过程。
还原操作将移除 ToolsTalk 2 中为所选控制器存储的所有配置。这还将为所选控制器移除任何阻止。在控制器或 web 界面进行的任何更改都将像往常一样复制到数据库。
报告
在此部分,您可以了解可用的报告。
结果和事件
与控制器图形用户界面上的较小屏幕相比,ToolsTalk 2 能够显示更详细的拧紧结果。
拧紧完成后,来自控制器的拧紧结果将自动从控制器发送到 ToolsTalk 2。
控制器还可以将拧紧结果发送到 ToolsNet 8 进行进一步处理和统计分析。
在 ToolsTalk 2 中,可以同时从一个控制器查看结果并创建报告。每个任务显示为一个结果。单次拧紧的结果可以以表格形式(含关键参数)或拧紧图形的形式显示。批次序列按照执行顺序显示所有单独的拧紧。
统计分析、结果筛选和拧紧分析可以使用 ToolsNet 8 执行。有关如何完成此操作的更多信息,请参见 ToolsNet 8 文档。
图标 | 说明 |
|---|---|
 | 工作区显示来自所选控制器的拧紧结果。结果可以以表格格式和图形轨迹显示。 |
 | 控制器事件根据设置 |
使用结果选项卡
拧紧结果显示在可以单独或集体选择的精简列表中,以便进一步分析。
在每个页面底部选择仅显示 NOK 结果,可仅查看 NOK 状态的结果。
拧紧结果
图形用户界面部分 | 说明 |
|---|---|
固定大头针 | 选择固定大头针图标将结果固定到固定选项卡。 |
轨迹图标 | 选择轨迹图标在轨迹工作区查看结果的图形视图。 |
保存图标 | 此命令创建一个包含结果数据的 zip 文件。打开弹出对话窗口将文件保存在所需的位置。 |
分路校准 | 显示是否显示分路校准。 |
总体状态 | 拧紧的总体状态,OK 或 NOK。 |
类型 | |
虚拟站点名称 | 虚拟站点的名称。 |
同步模式索引和名称 | 拧紧中使用的同步模式的索引和名称。 |
时间戳 | 拧紧的时间戳,即时间和日期。 |

通道结果
对于每个通道,总体结果报告如下内容:
图形用户界面部分 | 说明 |
|---|---|
轨迹 | 选择轨迹图标在轨迹工作区查看结果的图形视图。 |
保存 | 此命令创建一个包含结果数据的 csv 文件。打开弹出对话窗口将文件保存在所需的位置。 |
螺栓名称 | 螺栓的编号和名称。在同步模式 > “同步模式名称” > 螺栓配置 > 螺栓和螺栓名称中设置。 |
状态 | 拧紧的总体状态,OK 或 NOK。 |
多步骤名称 | 拧紧程序的名称。拧紧和多步骤程序中的设置 > “拧紧程序的名称” > 基本设置 > 名称。 |
通道 | 通道编号。 |
目标角度 | 目标角度将显示为拧紧策略配置的目标角度值,用于执行拧紧。 |
最终角度 | 最后一个拧紧步骤的实际测量角度。它是报告此参数的最后一个拧紧步骤中的步骤监控器峰值角度。 |
最终扭矩 | 拧紧的最终扭矩。它是报告此参数的最后拧紧步骤中的步骤监控器峰值扭矩。 |
目标扭矩 | 目标扭矩。 |
已用时间 | 从扭矩开始到结束的时间。 |
分路校准 | 选择此图标显示分路校准数据。 |
步骤结果
多步骤拧紧程序中的每一步都会报告数据。大部分数据来自在步骤中处于活动状态的监控器和限制,因此仅在配置了正确类型的监控器或限制时才报告数据。
步骤结果参数 | 说明 |
|---|---|
要执行的 | 步骤的编号。 |
状态 | 步骤的状态,OK 或 NOK。 |
步骤类型 | 多步骤程序中的步骤类型。 |
路径 | 指出步骤所在的程序,即它是在拧紧路径还是修复或终止路径中。 |
峰值扭矩 (Nm) | 测得的最终扭矩包括内部破裂过程中感应的扭矩。通常峰值扭矩高于切断扭矩。 |
已用时间 | 从扭矩开始到结束的时间。 |
角度 |
|
结果报告器
列表显示了来自结果报告器的值。如果为程序监视器/限制定义了结果报告器,则报告该监视器/限制中的值。如果没有为程序监视器/限制定义结果报告器,则报告主路径中最新执行结果报告器的值。
如果在程序中定义了多个相同类型的报告者,则评估顺序为:
程序监视器/程序限制结果报告。
主路径中最后执行步骤的监视器/限制结果报告。
相应结果报告器设置的最高级别多步结果的值:
结果报告器最终角度设置的最终角度
结果报告器最终扭矩设置的最终扭矩
结果报告器当前设置的当前
轨迹
在结果上,单击轨迹图标(如果它是活动的话)。 。结果图形显示。可以通过选择多条轨迹来同时查看多条轨迹。
。结果图形显示。可以通过选择多条轨迹来同时查看多条轨迹。
轨迹工作区显示有关一个或多个拧紧结果的详细图形信息。
在工作区,使用鼠标滚轮放大或缩小。或者您可以选择一个区域进行放大。双击跟踪区域返回。
示例:
选择要放大的区域:
要移动轨迹,请按下鼠标的滚轮按钮:

在跟踪图形中,可以显示基于所选轴类型的增量信息。右键单击要比较的两个点以显示它们之间的增量。拖动点以修改目标。
拖动增量以移动它或按删除删除它。
轨迹设置/首选项 | 说明 |
|---|---|
显示限值 | 选中此框时,如果显示一条曲线,当限值被用于拧紧程序时,它们可能会显示。 |
显示最小值/最大值 | 显示最小或最大测量值 |
峰值同步 | 不同的曲线可能看起来是一样的,但在图中的位置不同。 此选项创建曲线的叠加并同步它们的峰值。 |
|X 轴| | 显示 X 轴的绝对值。 |
Y1 | 选择要在 Y1 轴上显示的信息:
|
Y2 | 选择要在 Y2 轴上显示的信息:
|
Y3 | 选择要在 Y3 轴上显示的信息:
|
X | 选择要在 X 轴上显示的信息:
|
移除全部 Δ | 删除所有的增量。 |
保存.... | 此命令创建图形区域的图片。打开弹出对话窗口将文件保存在所需的位置。文件名默认为 export.png。 |
移除全部 | 此按钮可清除曲线图区域。 轨迹仍然留在结果中,可以在“实时结果”工作区中再次访问。 |
分路校准
点击结果上的分流校准图标
 以获取分流校准参数。
以获取分流校准参数。
在拧紧之前,每个工具执行分路校准和零点偏移补偿。
|
|
|---|---|
多步骤名称 | 工具运行的拧紧程序的名称。 |
增益 | 相对于测得的零扭矩。 |
增益差 | 与之前的校准相比的增益差。 |
增益上限 | 相对于测得的零扭矩的上限。 |
增益下限 | 相对于测得的零扭矩的下限。 |
增益最大变化 | 与之前的校准相比,增益的最大可能变化量。 |
偏移 | 相对于理想零扭矩的有符号偏移量。 |
偏移差 | 与之前的校准相比的偏移差。 |
偏移上限 | 相对于理想零扭矩的上限。 |
偏移下限 | 相对于理想零扭矩的下限。 |
偏移下限 | 理想零扭矩的下限。 |
偏移最大变化 | 与之前的校准相比,偏移的最大可能变化量。 |
分路失败 | True 或 False。 |
零点偏移失败 | True 或 False。 |
固定 - 研究保持区
拧紧结果可临时存储在固定区。这对于详细分析拧紧结果很有用,并且可防止在收到新的结果时,拧紧结果从窗口中删除。
手动:在结果上,选择大头针图标
 。
。拧紧结果被复制到固定区供研究。可固定几个结果到临时存储区。
自动:选择自动固定下拉菜单并输入要固定的结果数量。选择启动。下一个输入的结果将被自动固定,继续直到输入的数字达到或直到按下停止为止。
从固定区移除所有结果
要移除单个结果,可通过选择固定图标 取消固定它。
实时结果
一旦任务完成,控制器会将拧紧结果发送到 ToolsTalk 2,并将结果添加到实时结果的顶部。只能存储有限数量的结果。如果列表已满,最早的结果将从列表中删除。
在顶层,带有几个通道的同步拧紧的结果包含以下信息:
图形用户界面部分 | 说明 |
|---|---|
红柱 | 实时结果表中最左边的位置可能有一个红柱图标 |
固定大头针 | 选择固定大头针图标将结果固定到固定选项卡。 |
保存图标 | 此命令创建一个包含结果数据的 .csv 文件。打开对话窗口将文件保存在所需的位置。 |
轨迹图标 | 选择轨迹图标在轨迹工作区查看结果的图形视图。 |
总体状态 | OK 或 NOK。 红柱图标总是伴随 NOK 结果出现,以快速标识错误的拧紧。 |
虚拟站点名称 | 虚拟站点的名称。 |
同步模式索引和名称 | 拧紧中使用的同步模式的索引和名称。 |
时间戳 | 拧紧的时间戳,即时间和日期。 |
 ,指出错误的拧紧以快速识别错误。这与 NOK 对应。
,指出错误的拧紧以快速识别错误。这与 NOK 对应。使用事件选项卡
如要查看控制器事件:
在工厂结构
中选择一个控制器。 转到事件
。
工作区显示来自所选控制器的事件。事件为控制器运行状态中的变化。
对于每个控制器,当控制器处于联机状态时,ToolsTalk 2 数据库中最多可以存储 1024 个最新接收结果。但是,当控制器处于离线状态时,最近在此期间发生的十个结果将被存储并在控制器联机后转移到 ToolsTalk 2。
结果参数 | 说明 |
|---|---|
严重性 | 显示为符号。 |
日期和时间 | 显示为控制器中的设定时间。 |
代码 | 事件代号。 |
说明 | 事件说明。 |
详情 | 有关事件的更详细信息。 |
虚拟站 | 虚拟站名称。 |
组 | 控制器、驱动器、工具或托架。 |
通道 | 触发事件的通道。 |
托架 | 托架编号 |
序列号 | 设备序列号。 |
符号 | 说明 |
|---|---|
 | 事件类型 错误。 |
 | 事件类型 警告。 |
 | 事件类型 信息。 |
严重性类型
事件分成三类;信息、警告和错误。
信息事件
信息事件  指的是,因用户或系统执行的动作而发生的引人注目的事件。信息事件不需要用户采取任何特殊行动。
指的是,因用户或系统执行的动作而发生的引人注目的事件。信息事件不需要用户采取任何特殊行动。
警告事件
警告事件  表示可能影响系统性能或导致人员受伤的潜在严重状况。
表示可能影响系统性能或导致人员受伤的潜在严重状况。
错误事件
错误事件 表示中止运行之类的严重状况,几乎全都需要用户对设置或配置进行更改才能继续。
添加控制器事件通知
本节说明如何为不同的控制器事件启用通知。如果要接收有关特定控制器事件的通知,则应在设置菜单的事件子选项卡中为那些事件勾选日志和显示复选框。
在工作区的右上角选择
。在 ToolsTalk 2 用户设置对话框中,您可以选择将所有通知关闭或启用以下通知:
显示所有
显示错误和警告
仅显示错误
选择保存和关闭。
根据在设置/事件菜单中启用了哪些控制器事件(勾选日志和显示框)以及在 ToolsTalk 2 用户设置中选择的值(错误、警告或这两者),从连接的控制器接收到的所有事件将于收到时在控制器事件通知窗口中显示。
在列表中选择一个控制器以展开并查看与该控制器相关的所有通知。
每个通知具有以下描述的值:
项目
说明
严重性
严重性以图标表示:
- - 错误
- - 警告
- - 信息
代码
事件代码识别。
说明
事件代码说明。
日期和时间
事件发生时的时间戳,以控制器时间表示。
组
系统说明。
故障排除和保养
本节提供了对问题进行故障排除的帮助,并包含有助于您维护和维修产品的信息。
安装过程中的故障排除
升级 ToolsTalk 2 后重新启动 ToolsTalk Industrial Technique Host 服务。
错误 | 解决方案 |
|---|---|
错误代码 1920 无法启动验证您是否有正确的权限 | 数据库认证错误。对于 SQL 数据库,必须配置混合模式身份验证。 使用 SQL 管理工作室来更正身份验证。在进行另一次安装尝试之前,最有可能需要重新启动计算机。 |
使用安装文件时,InstallShield 向导会检测安装是否已经完成。如果计算机上存在较旧的安装,则可能无法检测到它们。
因此,建议在开始新安装之前删除程序和数据库目录的旧实例。
启动过程中的故障排除
错误 | 解决方案 |
|---|---|
启动应用程序,但不能看到所需的控制器。 | 控制器网络连接不正确。 确保控制器已正确连接到工厂网络。 适用于使用网络连接时。 |
启动应用程序,但不能看到所需的控制器。 | ToolsTalk 2 的控制器配置不正确。 确保控制器配置中的 server connections(服务器连接)指向正确的 ToolsTalk 2 服务器。 |
当 ToolsTalk 2 启动时显示错误消息“网络连接丢失或服务器不可用”。 | 客户端应用程序未正确连接到服务器应用程序。 检查服务器应用程序是否已启动。 应用程序应该自动启动。如果没有发生这种情况,解决方案是删除应用程序(卸载)并重新安装应用程序。 |
参考
现场总线信号
输入信号
中止序列 - 10012
接收到批次序列中止请求时,批次序列功能仅在获得正在进行的拧紧结果后才中止批次序列。
SoftPLC 中的名称:ABORT_BATCH_SEQUENCE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次递减 - 10002
批次计数以 1 为单位递减。
SoftPLC 中的名称:BATCH_DECREMENT
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次递增 - 10001
批次计数以 1 为单位递增。
SoftPLC 中的名称:BATCH_INCREMENT
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
旁路拧紧程序 - 10008
在正在运行的批次序列中跳过下一个拧紧程序。
SoftPLC 中的名称:BYPASS_PSET
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通道命令 - 10054
SoftPLC 中的名称: CHANNEL_COMMAND
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint32 数组 | 1 | 32 |
设备
该信号包含子信号,请参见 子信号 - 输入 查看所有子信号。
禁用现场总线 - 10049
停用现场总线。
SoftPLC 中的名称:DISABLE_FIELDBUS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
禁用测试螺栓 - 10057
SoftPLC 中的名称:DISABLE_TESTBOLT
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
禁用工具 - 30000
如果信号设置为真,则立即停止并锁定工具。
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
动态批次大小 - 10074
SoftPLC 中的名称:DYNAMIC_BATCH_SIZE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 16 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
启用操作 - 10055
SoftPLC 中的名称:ENABLE_OPERATION
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
到 PF 的现场总线异步数据 - 10077
SoftPLC 中的名称:
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint8 数组 | 16 | 2048 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
现场总线锁定拧松 - 20021
如果从已连接且受支持的附件设置了信号,则在开始拧松时,虚拟站点被锁定。
由于“停止驱动”设置,当现场总线锁定拧松设置为真时,正在进行的拧松将立即中止。
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
现场总线锁定拧紧 - 20020
如果从已连接且受支持的附件设置了信号,则在开始拧紧时,虚拟站点被锁定。
由于“停止驱动”设置,当现场总线锁定拧紧设置为真时,正在进行的拧紧将立即中止。
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
刷新读取结果队列 - 30005
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
选择输入位 4-10066
SoftPLC 中的名称:SEL_INPUT_BIT_4
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
动态批次大小的 ID - 10073
SoftPLC 中的名称:DYNAMIC_BATCH_SIZE_TPID
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 整数 | 1 | 16 |
TreatZeroAsOne | 状态 | 整数 | 1 | 16 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
锁定拧松 - 20003
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
锁定拧紧 - 20002
工具被数字输入锁住进行拧紧。
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
锁定工具高态有效 - 20004
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
锁定工具低态有效 - 20061
此信号低时锁定工具。
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
主站解锁 - 10005
解锁锁定页面中定义的大部分锁定。
SoftPLC 中的名称:MASTER_UNLOCK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
脉冲停止 - 10030
如果产生此信号,将停止任何进行的拧紧或拧松。与 10024 或 10072 结合使用。
SoftPLC 中的名称:TIGHTENING_STOP_PULSE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
读取结果握手确认 - 30004
在现场总线设备中启用读取结果握手功能,以使控制器可用于后结果握手确认信号。
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
重置所有标识符 - 10115
在来源批次字符串中,用于一次重置字符串接收序列中的所有接收到的字符串标识符。在其他工作任务中,清除 VIN 数字。
SoftPLC 中的名称:RESET_ALL_IDENTIFIERS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置批次 - 10003
批次计数器重置为 0。无批次 OK(nxOK)。如果激活批次 OK,则它会被停用。
SoftPLC 中的名称:RESET_BATCH
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置批次序列 - 10053
重置批次序列。结束时解锁由工具锁定来锁定的工具。
SoftPLC 中的名称:RESET_BATCH_SEQUENCE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置循环状态 - 10056
SoftPLC 中的名称:RESET_CYCLE_STATUS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置最新标识符 - 10114
在来源批次字符串中,用于重置字符串接收序列中的最新接收到的字符串。在其他工作任务中,清除 VIN 数字。
SoftPLC 中的名称:RESET_LATEST_IDENTIFIER
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置序列状态 - 10118
重置批次序列完成/OK/NOK 和序列中止的信号。
SoftPLC 中的名称:RESET_SEQUENCE_STATUS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置系统错误 - 10062
SoftPLC 中的名称:RESET_SYSTEM_ERROR
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
重置太多 NOK - 10013
收到锁定“Too Many NOK”(过多异常)后,重置批次
SoftPLC 中的名称:RESET_TOO_MANY_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
选择输入 - 10020
在序列内选择来源拧紧/批次中的拧紧程序。
SoftPLC 中的名称:SELECT_INPUT_VALUE
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 整数 | 1 | 16 |
TreatZeroAsOne | 状态 | 整数 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
选择输入和动态批次大小 - 30007
它用于在运行“外部批次控制”的来源拧紧任务中设置特定“识别编号”的批次大小。
批次大小可以设置为 1-250。
如果批次大小设置为 0,则将其视为无限批次。一旦设置了批次,用户便无法取消设置回到没有大小的状态。
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 整数 | 16 | 16 |
TreatZeroAsOne | 状态 | 整数 | 16 | 16 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
选择输入位 0-10016
SoftPLC 中的名称:SEL_INPUT_BIT_0
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 1-10017
SoftPLC 中的名称:SEL_INPUT_BIT_1
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 2-10018
SoftPLC 中的名称:SEL_INPUT_BIT_2
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 3-10019
SoftPLC 中的名称:SEL_INPUT_BIT_3
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 5-10067
SoftPLC 中的名称:SEL_INPUT_BIT_5
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 6-10068
SoftPLC 中的名称:SEL_INPUT_BIT_6
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 7-10069
SoftPLC 中的名称:SEL_INPUT_BIT_7
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 8-10070
SoftPLC 中的名称:SEL_INPUT_BIT_8
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择输入位 9-10071
SoftPLC 中的名称:SEL_INPUT_BIT_9
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择拧松 - 10029
选择拧松作为默认操作模式,与启动工具 - 10028 信号结合使用。
SoftPLC 中的名称:SELECT_LOOSENING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
选择下一个识别编号 - 10116
当虚拟站点中的任务配置为下列时,可以使用信号“选择下一个识别编号”:
批次序列
来源拧紧
来源批次
数字标识符方法
字符串标识符方法
ST 选择器可配置的功能接下一个和接上一个使输入信号能够选择下一个识别编号和选择上一个识别编号。
批次序列选择为虚拟站点任务
如果启用了自由顺序开关,则信号“选择下一个识别编号”可以选择所选序列中的不同批次。
在选择批次之前,必须为其分配识别编号。如果批次未分配识别编号,则即使启用了自由顺序开关,信号“选择下一个识别编号”也无法选择它。
它允许循环具有已配置识别编号的批次。
如果识别编号为“无”,则只有在完成所有配置了识别编号的批次后才可以选择它。
可以进行循环,但是跳过 0。批次完成后,它将不再可选。
例如,如果批次分配的识别编号为 1、2、4、5,则信号一直循环运行:1、2、4、5、1、2、4......,只要批次未完成。
来源拧紧已选择为虚拟站点任务
该信号从来源拧紧任务中指定的拧紧程序列表中选择下一个识别编号。
选择从当前选择的识别编号运行到下一个较大的识别编号。
当最大的识别编号被选择时,该信号选择 0;在 0 之后,信号选择下一个较大的识别编号。
如果选择 0 作为识别编号,则该工具被锁定。
如果识别编号已添加到“来源拧紧”列表中,但尚未分配过拧紧程序,则在“来源拧紧”列表中循环时将跳过该识别编号。
如果将拧紧程序分配给一个识别编号,然后将其从拧紧程序列表中删除,则仍然可以选择该识别编号。在这种情况下,由于没有特定的拧紧程序,工具被锁定。
当选择器模式开关设置为确认时,需要分配和配置套筒选择器。所有拧紧程序都可以选择,但在运行它们之前,必须从套筒选择器中提起合适的套筒。
来源批次被选择为虚拟站点任务
在来源 > 批次序列 > 来源批次中,当识别方法设置为编号时,信号“选择下一个识别编号”将从来源批次任务中显示的序列列表中选择序列。
可以循环通过 0。信号“选择下一个识别编号”仅选择分配给序列的识别编号。
例如,如果有 4 个序列的识别编号分别为 1、2、4 和 8,则信号“选择下一个识别编号”'将迭代并选择 1、2、4、8、0、1、2......
未定义的识别编号未被选择。
在来源 > 批次序列 > 来源批次中,当识别方法设置为字符串时,有必要通过外部来源(如扫码枪或开放协议)选择序列。信号“选择下一个识别编号”能够选择所选序列中的批次。
SoftPLC 中的名称:SELECT_NEXT_ID_NUMBER
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
选择上一个识别编号 - 10117
当虚拟站点中的任务配置为下列时,可以使用信号“选择上一个识别编号”:
批次序列
来源拧紧
来源批次
数字标识符方法
字符串标识符方法
ST 选择器可配置的功能接下一个和接上一个使输入信号能够选择下一个识别编号和选择上一个识别编号。
批次序列选择为虚拟站点任务
如果启用了自由顺序开关,则信号“选择上一个识别编号”可以选择所选序列中的不同批次。
在选择批次之前,必须为其分配识别编号。如果批次未分配识别编号,则即使启用了自由顺序开关,信号“选择上一个识别编号”也无法选择它。
它允许循环具有已配置识别编号的批次。
如果识别编号为“无”,则只有在完成所有配置了识别编号的批次后才可以选择它。
可以进行循环,但是跳过 0。批次完成后,它将不再可选。
例如,如果批次分配的识别编号为 1、2、4、5,则信号一直循环运行:5、4、2、1、5、4、2......只要批次未完成。
来源拧紧已选择为虚拟站点任务
该信号从来源拧紧任务中指定的拧紧程序列表中选择上一个识别编号。
选择从当前选择的识别编号运行到上一个较小的识别编号。
当最小的识别编号被选择时,该信号选择 0;在 0 之后,信号选择下一个较小的识别编号。
如果选择 0 作为识别编号,则该工具被锁定。
如果将拧紧程序分配给一个识别编号,然后将其从拧紧程序列表中删除,则仍然可以选择该识别编号。在这种情况下,由于没有特定的拧紧程序,工具被锁定。
当选择器模式开关设置为确认时,需要分配和配置套筒选择器。所有拧紧程序都可以选择,但在运行它们之前,必须从套筒选择器中提起合适的套筒。
来源批次被选择为虚拟站点任务
在来源 > 批次序列 > 来源批次中,当识别方法设置为编号时,信号“选择上一个识别编号”将从来源批次任务中显示的序列列表中选择序列。
可以循环通过 0。信号“选择上一个识别编号”仅选择分配给序列的识别编号。
例如,如果有 4 个序列的识别编号分别为 1、4、4 和 8,则信号“选择上一个识别编号”'将迭代并选择 8、4、2、1、0、8、4......
未定义的识别编号未被选择。
在来源 > 批次序列 > 来源批次中,当识别方法设置为字符串时,有必要通过外部来源(如扫码枪或开放协议)选择序列。信号“选择上一个识别编号”能够选择所选序列中的批次。
SoftPLC 中的名称:SELECT_PREVIOUS_ID_NUMBER
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
开始拧松 - 10011
激活信号开始拧松。一旦数字输入信号停止,拧松也必须停止。
SoftPLC 中的名称:START_LOOSENING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
开始拧松,脉冲 - 10072
SoftPLC 中的名称:SELECT_PREVIOUS_ID_NUMBER
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
开始拧紧 - 10010
激活信号开始拧紧。一旦输入信号停止,拧紧也必须停止。
SoftPLC 中的名称:START_TIGHTENING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
开始拧紧脉冲 - 10024
拧紧在出现信号时开始。直至拧紧结束或直至拧紧程序按出现 30 秒超时结束。
SoftPLC 中的名称:TIGHTENING_START_PULSE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
启动工具 - 10028
激活信号启动工具(默认操作模式为拧紧)。信号一中断,工具就必须停止。与“选择拧松 - 10029”信号结合使用。
SoftPLC 中的名称:START_DRIVE_CONTINIOUS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
启动工具,脉冲 - 10113
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
到 SoftPLC - 10065
SoftPLC 中的名称:TO_PLC
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint8 数组 | 1 | 1 |
完成时解锁工具 - 10051
解锁被“完成时锁定工具”锁定的工具。
SoftPLC 中的名称:UNLOCK_TOOL_ON_COMPLETE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
输出信号
活动的识别字符串 - 186
设置何时接收到识别字符串并被工作任务接受;甚至必须运行序列或拧紧程序。
如果运行来源批次字符串,则在接收到所有扫描并选择了一个序列时设置它。在这种情况下,它包括由保存的位置组成的串联字符串。
对于其他工作任务,它包括“VIN”编号。
SoftPLC 中的名称:ACTIVE_IDENTIFIER_STRING
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
活动的识别字符串 1-188
对应于 Source batch-string 中第一个配置的字符串的信号。
一旦完成扫描序列并选择了一个序列,就会发送活动的识别字符串 1 信号,因此标识符部分处于活动状态。
字符串将使用保存的位置进行过滤。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:ACTIVE_ID_STRING_1
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
活动的识别字符串 2-189
对应于 Source batch-string 中第二个配置的字符串的信号。
一旦完成扫描序列并选择了一个序列,就会发送活动的识别字符串 2 信号,因此标识符部分处于活动状态。
字符串将使用保存的位置进行过滤。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:ACTIVE_ID_STRING_2
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
活动的识别字符串 3-190
对应于 Source batch-string 中第三个配置的字符串的信号。
一旦完成扫描序列并选择了一个序列,就会发送活动的识别字符串 3 信号,因此标识符部分处于活动状态。
字符串将使用保存的位置进行过滤。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:ACTIVE_ID_STRING_3
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
活动的识别字符串 4-191
对应于 Source batch-string 中第四个配置的字符串的信号。
一旦完成扫描序列并选择了一个序列,就会发送活动的识别字符串 4 信号,因此标识符部分处于活动状态。
字符串将使用保存的位置进行过滤。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:ACTIVE_ID_STRING_4
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
批次完成 - 30
批次计数器等于批次容量数字。结果可能是 OK 或 NOK。
SoftPLC 中的名称:BATCH_COMPLETED
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次完成 NOK - 37
批次完成,状态 NOK。
SoftPLC 中的名称:BATCH_COMPLETED_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次完成 OK - 36
批次完成,状态 OK。
SoftPLC 中的名称:BATCH_COMPLETED_OK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次计数 - 31
批次中的当前数字。仅可在显示屏上查看。
SoftPLC 中的名称:BATCH_COUNT
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:真
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
批次运行 - 32
表示批次序列中的一个批次正在运行。
SoftPLC 中的名称:BATCH_RUNNING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
批次序列完成 NOK - 46
批次序列完成,状态 NOK。
SoftPLC 中的名称:BATCH_SEQUENCE_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次序列完成 OK - 45
批次序列完成,状态 OK。
SoftPLC 中的名称:BATCH_SEQUENCE_OK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
批次序列完成 - 48
指示序列何时完成,有“批次序列完成 OK”和“批次序列完成 NOK”两种情况。
SoftPLC 中的名称:BATCH_SEQUENCE_COMPLETED
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 事件 | 布尔 | 1 | 1 |
反转 | 事件 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
批次序列运行 - 47
指示批次序列是否正在运行。
SoftPLC 中的名称:BATCHSEQUENCE_RUNNING
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
螺栓拧紧状态 - 79
SoftPLC 中的名称:BOLT_TIGHTENING_STATUS
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | uint32 数组 | 32 | 32 |
FordResultStatus | 状态 | 4 | 4 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
该信号包含子信号,请参见 子信号 - 输出 查看所有子信号。
通道硬件状态 - 81
SoftPLC 中的名称:CHANNEL_HARDWARE_STATUS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint32 数组 | 1 | 64 |
设备
该信号包含子信号,请参见 子信号 - 输出 查看所有子信号。
通道拧紧状态 - 80
SoftPLC 中的名称:CHANNEL_TIGHTENING_STATUS
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | uint32 数组 | 1 | 64 |
FordResultStatus | 状态 | 4 | 4 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
该信号包含子信号,请参见 子信号 - 输出 查看所有子信号。
配置版本 - 88
SoftPLC 中的名称:CONFIGURATION_VERSION
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 32 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
控制器开启 - 42
IO Exchange 启动时设为真。
SoftPLC 中的名称:IO_ON
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
当前运行的批次 - 180
显示序列中当前运行批次的索引。如果使用套筒选择器,则如果没有选择套筒、选择了多个或错误的套筒时,它将显示零。如果使用批次模式并且正在运行批次,则对于来源拧紧,它将显示 1。
SoftPLC 中的名称:CURRENT_RUNNING_BATCH_IX
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:真
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
循环完成 - 77
SoftPLC 中的名称:CYCLE_COMPLETE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
循环 NOK - 76
SoftPLC 中的名称:CYCLE_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
循环 OK - 75
SoftPLC 中的名称:CYCLE_OK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
循环运行 - 78
SoftPLC 中的名称:CYCLE_RUNNING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
循环已准备好开始 - 82
SoftPLC 中的名称:CYCLE_READY_TO_START
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
紧急停止 - 20036
SoftPLC 中的名称: EMERGENCY_STOP
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
事件代码 - 30001
触发事件时中继事件。瞬时,开启两个循环时间。
SoftPLC 中的名称:EVENT_CODE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 16 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
事件代码严重性 - 30003
事件代码严重性是当触发的事件具有错误或警告的严重性时激活的输出信号。
SoftPLC 中的名称:EVENT_CODE_SEVERITY
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
事件出现 - 161
指示事件是否被触发。如果事件需要确认,则仅在附件上触发。
SoftPLC 中的名称:EVENT_PRESENT
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
来自 PF 的现场总线异步数据 - 107
SoftPLC 中的名称:
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint8 数组 | 48 | 2048 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
现场总线断开 - 96
SoftPLC 中的名称:FIELDBUS_DISCONNECTED
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
从 SoftPLC - 10064
已分配的字节,用于从 PLC 到附件的数据传输。
SoftPLC 中的名称:FROM_PLC
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | uint8 数组 | 8 | 8 |
设备
最后收到的识别字符串 - 187
在工作任务中收到标识符时直接设置。
对于来源批次字符串,它在扫描过程中的每次扫描时设置,因此,即使每次扫描的长度不匹配,也都会对其进行更改并发送。
字符串集采用原始格式,不仅是字符串中的“保存的位置”。
对于其他工作任务,此信号等于“活动的识别字符串”信号。
SoftPLC 中的名称:LAST_RECEIVED_ID_STRING
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
拧松被锁定 - 28
拧松被禁用。
SoftPLC 中的名称:LOOSENING_IS_LOCKED
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
拧松 NOK - 74
拧松 NOK 发生。
SoftPLC 中的名称:LOOSENING_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
拧松 OK - 70
正常拧松发生。
SoftPLC 中的名称:LOOSENING_OK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
达到最大连续 NOK - 35
表示达到拧紧计数器最大连续异常。
SoftPLC 中的名称:MAX_COHERENT_NOK_REACHED
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
无系统错误 - 83
SoftPLC 中的名称:NO_SYSTEM_ERROR
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
无系统警告 - 102
SoftPLC 中的名称:NO_SYSTEM_WARNING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
程序开始 - 132
定义拧紧循环的开始级别。
SoftPLC 中的名称:PROGRAM_START
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
读取结果队列已刷新 - 30006
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
收到的标识符 1-192
对应于 Source batch-string 中第一个配置的字符串的信号。
收到字符串后,将按照系统收到字符串/标识符的顺序发送“活动的识别字符串 1”信号。如果以强制顺序扫描运行,则它按配置的顺序运行,但是如果以自由顺序扫描运行,则 1 可能不对应于第一个配置的字符串,但对应于第一个收到的字符串。
该字符串是原始收到的字符串,未应用“保存的位置”。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:RECEIVED_IDENTIFIER_1
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
收到的标识符 2 - 193
对应于 Source batch-string 中第二个配置的字符串的信号。
收到字符串后,将按照系统收到字符串/标识符的顺序发送“活动的识别字符串 2”信号。如果以强制顺序扫描运行,则它按配置的顺序运行,但是如果以自由顺序扫描运行,则 2 可能不对应于第二个配置的字符串,但对应于第二个收到的字符串。
该字符串是原始收到的字符串,未应用“保存的位置”。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:RECEIVED_IDENTIFIER_2
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
收到的标识符 3 - 194
对应于 Source batch-string 中第三个配置的字符串的信号。
收到字符串后,将按照系统收到字符串/标识符的顺序发送“活动的识别字符串 3”信号。如果以强制顺序扫描运行,则它按配置的顺序运行,但是如果以自由顺序扫描运行,则 3 可能不对应于第三个配置的字符串,但对应于第三个收到的字符串。
该字符串是原始收到的字符串,未应用“保存的位置”。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:RECEIVED_IDENTIFIER_3
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
收到的标识符 4 - 195
对应于 Source batch-string 中第四个配置的字符串的信号。
收到字符串后,将按照系统收到字符串/标识符的顺序发送“活动的识别字符串 4”信号。如果以强制顺序扫描运行,则它按配置的顺序运行,但是如果以自由顺序扫描运行,则 4 可能不对应于第四个配置的字符串,但对应于第四个收到的字符串。
该字符串是原始收到的字符串,未应用“保存的位置”。
仅在运行来源批次字符串时发送。
SoftPLC 中的名称:RECEIVED_IDENTIFIER_4
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
剩余批次 - 33
批次中的剩余拧紧数。仅可在显示屏上查看。
SoftPLC 中的名称:REMAINING_BATCH
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:真
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
已选择的模式 ID - 72
SoftPLC 中的名称:SELECTED_MODE_ID
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 整数 | 1 | 32 |
TreatZeroAsOne | 状态 | 整数 | 1 | 32 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
选定的序列位 0 - 139
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_0
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 1 - 140
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_1
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 2 - 141
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_2
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 3 - 142
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_3
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 4 - 143
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_4
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 5 - 144
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_5
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 6 - 145
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_6
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 7 - 146
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_7
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 8 - 147
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_8
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列位 9 - 163
位模式显示所选序列。
SoftPLC 中的名称:SELECTED_SEQUENCE_BIT_9
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
现场总线:假
指示器框:假
内部 I/O:真
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:真
选定的序列 ID - 84
显示所选批次序列的索引。
SoftPLC 中的名称:SELECTED_BATCH_SEQUENCE_ID
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 整数 | 1 | 16 |
TreatZeroAsOne | 状态 | 整数 | 1 | 16 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:真
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
序列中止 - 160
输出信号指示序列是否中止。
SoftPLC 中的名称:SEQUENCE_ABORTED
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
服务指示灯警报 - 137
在工具维护中配置的服务警报提供了一种提醒用户何时需要维修工具的机制。
SoftPLC 中的名称:SERVICE_INDICATOR_ALARM
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
序列大小 - 181
显示当前正在运行的序列的大小。仅在加载序列时设置,完成序列后不重置。
SoftPLC 中的名称:SIZE_OF_RUNNING_SEQUENCE
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:真
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
软件主要版本 - 86
SoftPLC 中的名称:SOFTWARE_MAJOR_VERSION
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 32 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
软件次要版本 - 87
SoftPLC 中的名称:SOFTWARE_MINOR_VERSION
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 32 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
软件发布版本 - 85
正在运行的软件版本。
SoftPLC 中的名称:SOFTWARE_RELEASE_VERSION
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 32 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
站点就绪 - 71
指示虚拟站点何时准备就绪。
SoftPLC 中的名称:STATION_READY
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
测试螺栓已激活 - 91
SoftPLC 中的名称:SELECTED_MODE_ID
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
拧紧已锁定 - 27
拧紧已禁用;不可能进行任何拧紧。
SoftPLC 中的名称:TIGHTENING_IS_LOCKED
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
拧紧 NOK - 4
至少一个拧紧结果超出规定限值。
SoftPLC 中的名称:TIGHTENING_NOK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
拧紧 OK - 3
拧紧结果在规定限制范围内。
SoftPLC 中的名称:TIGHTENING_OK
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
工具拧松 - 22
表示工具正在拧松。
SoftPLC 中的名称:TOOL_LOOSENING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
工具拧紧 - 21
表示工具正在拧紧。
SoftPLC 中的名称:TOOL_TIGHTENING
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 布尔 | 1 | 1 |
设备
输入/输出信号
清除结果 - 39
清除设置为下一次拧紧的其他信号的状态。
SoftPLC 中的名称:CLEAR_RESULTS
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
禁用开放协议命令 - 10060
禁用通过开放协议向虚拟站点发送命令的可能性。
SoftPLC 中的名称:DISABLE_OPEN_PRTCOL_CMDS
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部标识符 - 10045
外部标识符中发送的字符串作为 VIN 号包含在结果中。可以提供最多 2 个标识符,从现场总线传递以进行任务选择。
SoftPLC 中的名称:EXTERNAL_IDENTIFIER
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 字符串 | 8 | 800 |
IdentifierU32Hnw | 状态 | 字符串 | 8 | 800 |
IdentifierU32 | 状态 | 字符串 | 8 | 800 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 1-10035
外部监视 1 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_1
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 2 - 10036
外部监视 2 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_2
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 3 - 10037
外部监视 3 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_3
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 4 - 10038
外部监视 4 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_4
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 5 - 10039
外部监视 5 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_5
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 6 - 10040
外部监视 6 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_6
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 7 - 10041
外部监视 7 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_7
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
外部监控 8 - 10042
外部监视 8 是一个输入/输出信号,它没有连接到控制器中的任何特定功能,可以用于客户的特定需求。
SoftPLC 中的名称:EXTERNAL_MONITORED_8
变换器 | 信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|---|
标准 | 状态 | 布尔 | 1 | 1 |
反转 | 状态 | 布尔 | 1 | 1 |
设备
为避免信号重复,可以定义值转换器。
转换器用于支持同一信号的多个表示(例如,角度/扭矩状态都可以按位表示或以状态字符表示)。
现场总线保持活动 - 30002
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
现场总线:真
指示器框:假
内部 I/O:假
操作员面板:假
工具功能:假
ST 选择器:假
多层警示灯:假
TLS 标签:假
I/O 扩展模块:假
通用 IO 1-50
用于开放协议的输入/输出 1。
SoftPLC 中的名称:GENERIC_IO_1
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 10-59
用于开放协议的输入/输出 10。
SoftPLC 中的名称:GENERIC_IO_10
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 2-51
用于开放协议的输入/输出 2。
SoftPLC 中的名称:GENERIC_IO_2
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 3-52
用于开放协议的输入/输出 3。
SoftPLC 中的名称:GENERIC_IO_3
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 4-53
用于开放协议的输入/输出 4。
SoftPLC 中的名称:GENERIC_IO_4
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 5-54
用于开放协议的输入/输出 5。
SoftPLC 中的名称:GENERIC_IO_5
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 6-55
用于开放协议的输入/输出 6。
SoftPLC 中的名称:GENERIC_IO_6
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 7-56
用于开放协议的输入/输出 7。
SoftPLC 中的名称:GENERIC_IO_7
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 8-57
用于开放协议的输入/输出 8。
SoftPLC 中的名称:GENERIC_IO_8
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用 IO 9-58
用于开放协议的输入/输出 9。
SoftPLC 中的名称:GENERIC_IO_9
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
状态 | 整数 | 1 | 8 |
设备
通用上升沿 1-169
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_1
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 10-178
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_10
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 2-170
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_2
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 3-171
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_3
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 4-172
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_4
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 5-173
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_5
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 6-174
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_6
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 7-175
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_7
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 8-176
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_8
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
通用上升沿 9-177
通用输入/输出信号。
SoftPLC 中的名称:GENERIC_RISING_EDGE_9
信号类型 | 数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|---|
事件 | 布尔 | 1 | 1 |
设备
子信号 - 输入
禁止无结果
SoftPLC 中的名称:CHANNEL_COMMAND_NO_RESULT
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
禁用 NOK 结果
SoftPLC 中的名称:CHANNEL_COMMAND_NOK_RESULT
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
禁用 OK 结果
SoftPLC 中的名称:CHANNEL_COMMAND_OK_RESULT
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
作用力 Pset
SoftPLC 中的名称:CHANNEL_COMMAND_FORCE_PSET
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
整数 | 1 | 8 |
作用力螺栓 ID
SoftPLC 中的名称:CHANNEL_COMMAND_FORCE_BOLT_ID
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
整数 | 1 | 8 |
子信号 - 输出
所有信号
SoftPLC 中的名称:CYCLE_STATUS_ALL
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
整数 | 1 | 32 |
循环运行
SoftPLC 中的名称:CYCLE_STATUS_RUNNING
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
已禁用
SoftPLC 中的名称:CYCLE_STATUS_INHIBITED
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
在所选模式下
SoftPLC 中的名称:CYCLE_STATUS_IN_SELECTED_MODE
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
运行修理
SoftPLC 中的名称:CYCLE_STATUS_REPAIR
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
运行终止
SoftPLC 中的名称:CYCLE_STATUS_TERMINATE
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
拧紧中
SoftPLC 中的名称:CYCLE_STATUS_RUNNING_TIGHTENING
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
拧松中
SoftPLC 中的名称:CYCLE_STATUS_RUNNING_LOOSENING
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期 OK
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_OK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期 NOK
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_NOK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
禁止的上一个周期
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_INHIBITED
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
未禁止的上一个周期
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_NOT_INCLUDED
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
他人终止的上一个周期
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_TERMINATED_BY_OTHER
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期硬件错误
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_HW_ERROR
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
绿色工具 LED 指示灯
SoftPLC 中的名称:CYCLE_STATUS_TOOL_LED_MIRROR_GREEN
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
黄色工具 LED 指示灯
SoftPLC 中的名称:CYCLE_STATUS_TOOL_LED_MIRROR_YELLOW
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
红色工具 LED 指示灯
SoftPLC 中的名称:CYCLE_STATUS_TOOL_LED_MIRROR_RED
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
最近拧紧 OK
SoftPLC 中的名称:CYCLE_STATUS_LAST_TIGHTENING_OK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
最近拧紧 NOK
SoftPLC 中的名称:CYCLE_STATUS_LAST_TIGHTENING_NOK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上次拧松 OK
SoftPLC 中的名称:CYCLE_STATUS_LAST_LOOSENING_OK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上次拧松 NOK
SoftPLC 中的名称:CYCLE_STATUS_LAST_LOOSENING_NOK
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期超时
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_TIMEOUT
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期扭矩高
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_TORQUE_HIGH
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期扭矩低
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_TORQUE_LOW
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期角度高
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_ANGLE_HIGH
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
上一个周期角度低
SoftPLC 中的名称:CYCLE_STATUS_LAST_CYCLE_ANGLE_LOW
数值类型 | 最小尺寸 [位] | 最大尺寸 [位] |
|---|---|---|
布尔 | 1 | 1 |
软 PLC 信号
参数 ID | 名称 | 方向 | 说明 |
|---|---|---|---|
10010 | 启动拧紧(连续) | 输入 | 激活信号开始拧紧。一旦输入信号停止,拧紧也必须停止。 |
10016 | 选择输入位 0 | 输入 | 选定位元 0 的输入信号。 |
10017 | 选择输入位 1 | 输入 | 选定位元 1 的输入信号。 |
10018 | 选择输入位 2 | 输入 | 选定位元 2 的输入信号。 |
10019 | 选择输入位 3 | 输入 | 选定位元 3 的输入信号。 |
10020 | 选择输入 | 输入 | 输入选择的值。 |
10024 | 拧紧 + 启动(脉冲) | 输入 | 拧紧在出现信号时开始。直至拧紧结束或直至拧紧程序按出现 30 秒超时结束。 |
10030 | 拧紧/拧松停止(脉冲) | 输入 | 如果产生此信号,将停止任何进行的拧紧或拧松。与 10024 联用。 |
10045 | 外部标识符 | 输入/输出 | 提供最多 2 个标识符,从现场总线传递以进行任务选择。 |
10049 | 停用现场总线 | 输入 | 停用现场总线。 |
10066 | 选择输入位 4 | 输入 | 选定位元 4 的输入信号 |
10067 | 选择输入位 5 | 输入 | 选定位元 5 的输入信号 |
10068 | 选择输入位 6 | 输入 | 选定位元 6 的输入信号 |
10069 | 选择输入位 7 | 输入 | 选定位元 7 的输入信号 |
10070 | 选择输入位 8 | 输入 | 选定位元 8 的输入信号 |
10071 | 选择输入位 9 | 输入 | 选定位元 9 的输入信号 |
10072 | 拧松启动(脉冲) | 输入 | 当此信号变高时,将启动拧松同步模式。 即使拧松启动(脉冲)信号变低,也会运行直至拧松完成。 |
10064 | 从 PLC | 输入 | 用于将信息从 SoftPLC 传送到附件的字节数组。 |
10054 | 通道命令 | 输入 | 使用通道命令可以禁止单个工具,因此它们不会包含在下一次拧紧中。 |
10055 | 启用操作 | 输入 | 必须设置为高才能在固定的系统中运行拧紧。在拧紧过程中设定为低,拧紧停止,循环状态为 NOK。 |
10056 | 重置循环状态 | 输入 | 当重置循环状态设置为 true 时,将执行站点状态和所有螺栓的重置。 如果在拧紧过程中设置此信号,则忽略该信号。 |
10057 | 禁用 Testbolt | 输入 | 信号控制是否可以从外部源执行测试螺栓。如果信号为 True(高),则无法从外部源执行测试螺栓。 |
10062 | 重置系统错误 | 输入 | 如果此输入设置为高,系统将尝试重置任何硬件错误。 |
82 | 循环已准备好开始 | 输出 | 当系统准备开始拧紧时,信号设置为高。如果满足以下条件,系统就绪:
|
78 | 循环运行 | 输出 | 当系统运行一个拧紧时设置为高。 |
77 | 循环完成 | 输出 | 当运行循环完成并且数据被永久存储时设置为高。 |
75 | 循环 OK | 输出 | 如果最后一次拧紧为 OK 则设置为高,并在收到启动信号时清除。 |
76 | 循环 NOK | 输出 | 如果最后一次拧紧为 NOK 则设置为高,并在收到启动信号时清除。 |
83 | 无系统错误 | 输出 | 如果系统中没有硬件错误,则无系统错误被设置为 true。 |
91 | Testbolt 已激活 | 输出 | Testbolt 已激活用于显示是否启用了测试拧紧。 |
20036 | 紧急停止 | 输出 | 系统紧急停止时设置为高 |
42 | IO 开启 | 输出 | 控制器开启。 |
96 | 现场总线已断开 | 输出 | 现场总线断开时,现场总线断开将设置为 True。 |
102 | 无系统警告 | 输出 | 如果任何工具报告“维修时间”或“校准时间”,则无系统警告设置为高。 |
100 | 标识符已收到 | 输出 | 收到的标识符用于指示已收到新标识符。 |
72 | 已选择的模式 ID | 输出 | 如果模式有效,已选择的模式 ID 将镜像输入模式值。如果模式无效或未选择模式,将发送“0”。 |
79 | 螺栓拧紧状态 | 输出 | 同步拧紧中各个螺栓的状态。支持 100 个螺栓。 |
80 | 通道拧紧状态 | 输出 | 同步拧紧中各个通道的状态。支持 64 个通道。 |
81 | 通道硬件状态 | 输出 | 各个通道的硬件状态。 |
85 | 软件发布版本 | 输出 | 控制器中运行的软件的发行版本。 |
86 | 软件主要版本 | 输出 | 控制器中运行的软件的主版本。 |
87 | 软件次要版本 | 输出 | 控制器中运行的软件的次版本。 |
88 | 配置版本 | 输出 | 控制器中当前使用的配置的版本。 |
10065 | 至 PLC | 输出 | 字节数组,用于将信息从附件传送到 SoftPLC。 |
非循环结果项
这是可以作为非循环数据发送的结果项列表。
非循环结果项 |
|---|
批量大小 |
批次序列计数器 |
批次序列当前状态 |
批次当前状态 |
批次计数 |
批次序列名称 |
批次序列索引 |
总体状态附加信息 |
模式名称 |
状态 |
拧紧程序名称 |
状态 |
操作模式 |
状态信息 |
停止错误 |
螺栓编号 |
最终扭矩 |
已用时间 |
螺栓名称 |
通道 |
失败的步骤 |
扭矩低限值 |
扭矩高限值 |
最终角度 |
角度低限值 |
角度高限值 |
目标角度 |
目标扭矩 |
启动最终角度 |
工具货号 |
工具序列号 |
压缩错误 |
最终角度 |
扭矩差 |
角度差 |
最大时间限值 |
日期和时间 |
VIN |
切断扭矩 |
测得的后螺纹切割角度 |
测得的后螺纹切割峰值扭矩 |
扭矩率 |
扭矩率偏差 |
角度窗口的扭矩低 |
返回查看平均扭矩高 |
返回查看扭矩高时对应的角度 |
滑动检测 - 测得的振荡次数 |
切断电流 |
返回查看平均扭矩低 |
返回查看扭矩低时对应的角度 |
屈服角度 |
有效扭矩 |
监视时间 |
峰值扭矩 |
角度 |
角度窗口的峰值扭矩 |
峰值扭矩 - 下限 |
关闭扭矩 - 下限 |
峰值扭矩 - 上限 |
关闭扭矩 - 上限 |
扭矩率和偏差 - 扭矩率下限 |
扭矩率和偏差 - 扭矩率上限 |
扭矩率和偏差 - 偏差极限 |
角度窗口扭矩 - 上限 |
角度窗口扭矩 - 下限 |
返回查看扭矩高 - 上限 |
返回查看扭矩低 - 下限 |
关闭电流 - 下限 |
屈服角度 - 上限 |
屈服角度 - 下限 |
关闭电流 - 上限 |
时间 - 下限 |
有效扭矩 - 上限 |
有效扭矩 - 下限 |
时间 - 上限 |
已用时间 |
十字螺纹 |
最大时间 - 上限 |
交叉线程 - 最小限值 |
交叉线程 - 最大限值 |
总体状态补充信息
在每个螺栓的多重级别和总级别有一个名为总体状态补充信息的字段。下表描述了该字段的可能参数:
参数 | 注释 |
|---|---|
已修理 | 拧紧的总体状态为正常,但是在拧紧期间至少有一个被修复的错误出现。 |
被拒绝管理终止 | 螺栓本身没有任何错误,但由于另一个螺栓出错而被命令终止。 |
拒绝管理终止失败 | 螺栓被命令终止,且当执行终止路径时出错。 |
已停止 | 由于一个来自外部的停止信号,例如通过现场总线发送的机器停机或者如果工具触发器被释放,拧紧结束。 |
已紧急停止 | 由于紧急停止,拧紧结束。 |
工具错误 | 由于工具中发生硬件错误,拧紧结束。 |
驱动错误 | 由于驱动器中发生硬件错误,拧紧结束。 |
已禁用 | 设备不允许运行,因为外部信号阻止了它。 |
InvalidPset | 控制器加载了一个无效的拧紧程序。 |
PreStartCheckFailed | 控制器的 preStartCheck 状态失败,原因可能有很多,比如工具错误、emergencyStop 激活以及系统收到停止信号等。 |
拒绝管理修复失败 | 螺栓被命令修复,且当执行修复路径时出错。 |
导出和导入的文件格式
控制器配置和结果的导出和导入可以从 ToolsTalk 2 应用程序的不同位置进行。导出还可能会导致不同的文件内容。
导出拧紧结果和事件用于进一步处理。
导出日志文件,以用作 Atlas Copco 服务工程师的调试援助。
导出可用于将设置复制到另一个控制器的控制器配置。
控制器数据的导出可以在控制器类型与控制器软件版本之间变化。有关文件格式和文件内容的详细说明,请参阅每个控制器和版本的文档。
这些表格提供了 ToolsTalk 2 导出的摘要。
位置 | 路径 | 文件类型和格式 | 使用 |
|---|---|---|---|
控制器库配置 |
| *.json | 导出控制器配置并创建控制器模板。 在 ToolsTalk 2 内部使用。 |
现场总线配置 |
| *.json | 导出现场总线配置。用于复制配置。与导入命令一起使用。 在 ToolsTalk 2 内部使用。 |
控制器软件和数据管理 |
| *.tar.gz | 用于从控制器完整地导出控制器结果和配置。还可以导出工具日志。 可用于导入先前导出的文件的配置和参数。 |
控制器计划导出和导入 |
| *.tar.gz | 用于按计划从控制器完整地导出控制器结果和配置。 可用于按计划导入先前导出的文件的配置和参数。 |
控制器导出和导入 |
| *.tar.gz | 用于按计划从控制器完整地导出控制器结果和配置。 还可用于按计划导入先前导出的文件的配置和参数。 如果用户权限阻止访问全局图标,则用作备用路由。 |
结果导出 |
| *.csv | 用于仅从控制器导出拧紧结果 |
控制器软件 |
| *px2it.zip | 加载新控制器软件。 |
文件类型和格式 | 使用 |
|---|---|
*.json | ToolsTalk 2 中使用的文件格式。 这些文件可用于复制配置和参数设置。 ToolsTalk 2 应用程序无法使用该文件格式。 |
*.tar.gz | 用于从控制器完整地导出控制器结果和配置。 控制器无法使用该文件格式。文件可能包含以下模块:
|
*.csv | 用于仅从控制器导出拧紧结果或事件。 该文件包含在 * .tar.gz 文件中。 csv 文件使用不同的字符来分隔字段,具体取决于控制器中的语言设置。 不同控制器软件版本的字段可能不同。 |
*px2it.zip | 仅用于加载控制器软件。不包含任何配置或参数设置。 |
打印场景
在站点完成打印
当要打印的程序位于控制器上并且您可以访问安装有 TT2 独立版本的 Atlas Copco PC 时使用此功能。通过连接到 Flex 控制器在站点上打印程序:
选择拧紧程序并打开它以查看。
使用软件右上方的打印按钮打印程序。(注意,对于 Windows 10 电脑,当您在 TT2 中使用打印选项时,默认情况下有一个名为“Microsoft print to pdf”的选项。在早期版本中,您可以通过安装 Adobe acrobat 或在较旧的 Windows 机器上安装 Foxit PDF 阅读器来添加此选项)。
使用处于活动状态的(在线)Flex 控制器打印 PF6 FlexSystem
当要打印的程序位于您无法访问的控制器的导出 xxx.tar.gz 文件中时,请使用此选项。使用从系统导出的 tar.gz 文件打印程序:
连接到任何 PF6 Flex 控制器。
从控制器导出当前配置(原始配置)。这是为了备份现有的系统,以便能够在最后恢复它。
将包含要打印的拧紧程序的配置文件导入到此控制器中。
按照在站点完成打印步骤中所述的打开并打印拧紧程序。
导入在步骤 2 中保存的原始配置以将控制器恢复到其原始状态。
使用处于非活动状态的(离线)PF6 FlexSystem 打印 PF6 FlexSystem
这提供了最简单的方式来打印文件(xxx.json 文件),而不需要在系统前面。
.Json 文件是作为从离线控制器(库)导出配置的结果而创建的。
将 .json 文件导入库。
从库中的 .json 文件打开配置。
打开并打印拧紧程序。
在 tar.gz 和 .json 之间转换
配置可以在连接的控制器和离线控制器之间移动;从 XXX.tar.gz 到 XXX.json,反之亦然。
先决条件:
Flex 控制器
TT2 安装
将 .tar.gz 文件转换为 .json 文件:
按照使用处于活动状态的(在线)Flex 控制器打印 PF6 FlexSystem的步骤 1-3。
右键单击左列中的控制器名称并单击“添加到库”。
转到库并查找作为离线控制器添加到库中的控制器名称。
选择控制器复选框 - 管理 - 导出 .json 文件。
将 .json 文件转换为 .tar.gz 文件:
按照使用处于非活动状态的(离线)Flex 控制器打印 PF6 FlexSystem的步骤 1-2。
选择控制器复选框 - 管理 - 分配。这将弹出一个您想要分发到连接的控制器的复选框项目列表。检查相关内容并选择分配。
打开工厂结构 - 控制器,然后导出以获取 xxx.tar.gz 文件。
系统信息
问题 | 解决方案 |
|---|---|
安装文件 | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client C:\Program Files (x86)\Atlas Copco\ToolsTalk Server C:\Program Files (x86)\Atlas Copco\ToolsTalk Station Setup |
来自安装的日志文件 | 在每个安装文件夹中都有一个名为 log.txt 的日志文件。 |
计算机 IP 地址 | 控制器配置所需的信息。 选择 Windows 开始菜单。 在窗口底部的框中键入 cmd,然后按 <return>。将打开管理员窗口。 键入 ipconfig 并点击 <return>。显示计算机的 IP 地址。 |
电脑名称 | 客户端安装所需的信息指向正确的服务器安装。 选择 Windows 开始菜单。 在窗口底部的框中键入系统信息,然后按 <return>。系统信息窗口打开。 在客户端安装中需要系统名称参数来指向服务器的位置。 |
删除数据库目录 | 启动所选 SQL Server 的管理工作室。 选择所需的数据库目录。默认名称为 ToolsTalkEventStore。 右键单击并选择 Delete(删除)。 选中复选框删除备份和.......。 选中复选框关闭现有.......。 选择确定。 |
检查和修改数据库认证 | 启动所选 SQL Server 的管理工作室。 选择所需的服务器。 右键单击并选择 Properties(属性)。 选择 Security(安全)页面。 在服务器认证字段中,标记 SQL server and windows authentication(SQL 服务器和 Windows 身份验证)单选按钮。 |
安装功能管理系统(FMS) | 仅适用于客户端-服务器安装。 FMS 安装是 InstallShield 向导的一部分,并自动运行。为正确安装,系统变量 JAVA_HOME 必须具有正确的值。 选择 Windows 开始菜单。 在窗口底部的框中键入系统变量。接下来将会显示几个选项。选择编辑系统环境变量。系统属性弹出窗口打开。 选择环境变量命令按钮。 在系统变量窗口中向下滚动并搜索变量 JAVA_HOME。 如果变量存在,则该值是 64 位 Java 安装的路径。 如果变量不存在,请选择新建命令按钮。接下来将打开 New system variable(新的系统变量)弹出窗口。 variable name(变量名)必须设置为 JAVA_HOME。 变量值必须设置为安装目录,即 C:\PROGRAM FILES\JAVA\JRE1.8.0_131。不要包含 BIN 文件夹。 |
检查功能管理系统(FMS)的安装是否正确。 | 选择 Windows 开始菜单。 在窗口底部的框中键入 Services(服务)。接下来将会显示几个选项。选择 Services(服务)。系统属性弹出窗口打开。 在列表中向下滚动并搜索 FlexNet License Server -acopco(FlexNet 许可服务器-acopco)。 如果 Status(状态)指示 Started(已启动),则 FMS 已安装并正在运行。 |
检查 ToolsTalk 2 服务器是否已安装并正在运行 | 选择 Windows 开始菜单。 在窗口底部的框中键入 Services(服务)。接下来将会显示几个选项。选择 Services(服务)。系统属性弹出窗口打开。 在列表中向下滚动并搜索用于 ToolsTalk 的 Atlas Copco 工业技术主机。 如果 Status(状态)指示 Started(已启动),则服务器已安装并正在运行。 |